
Submitted by
 Yukang
Yukang
YukangGet trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
Yukang
 ai-alanov
ai-alanov
 HaochenWang
HaochenWang ChaimZhu
ChaimZhu
 js-hyun
js-hyun
 Diankun
Diankun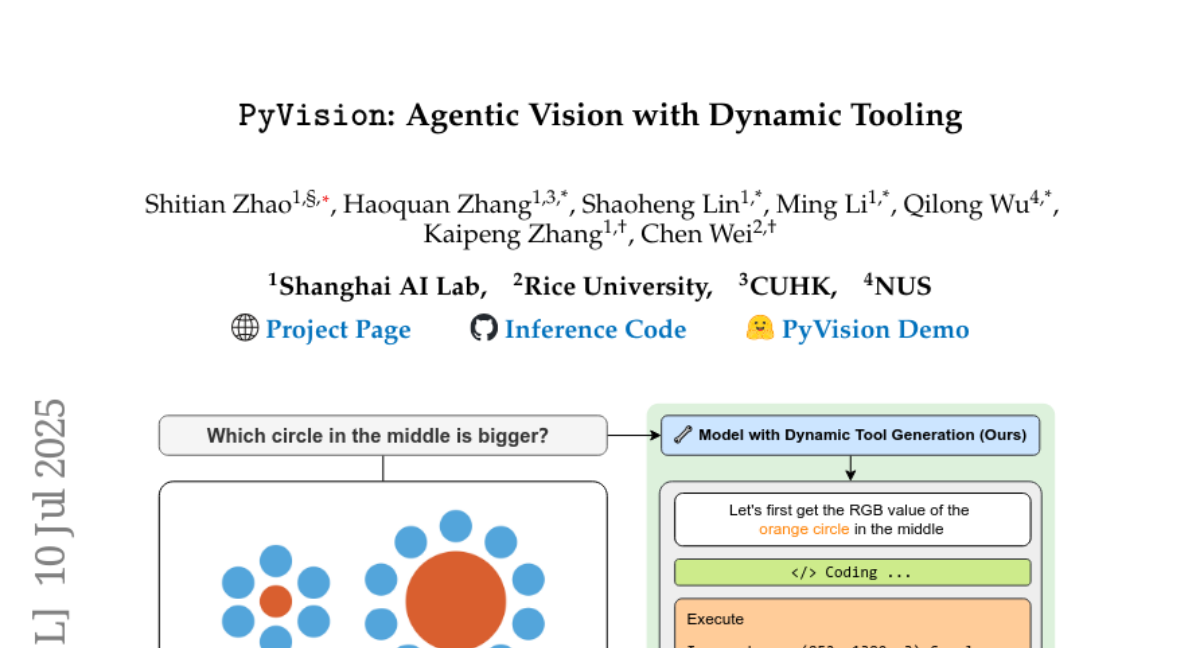
 stzhao
stzhao EthanTaylor
EthanTaylor
 Franck-Dernoncourt
Franck-Dernoncourt
 zhoutianyi
zhoutianyi
 bhheo
bhheo
 Xuandong
Xuandong
 SSamDav
SSamDav
 envomp
envomp
 dbralios
dbralios
 Bochkov
Bochkov
 xianbao
xianbao Bochkov
Bochkov














