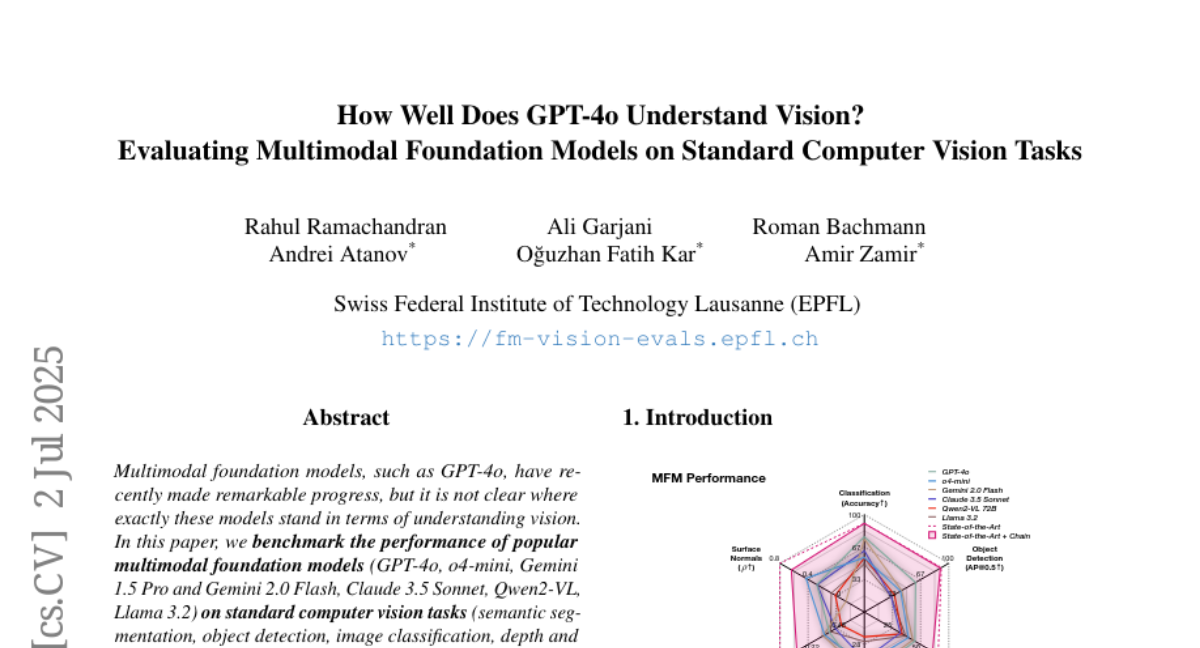
Submitted by nielsr 11 How Well Does GPT-4o Understand Vision? Evaluating Multimodal Foundation Models on Standard Computer Vision Tasks · 6 authors 28 2
Submitted by akhaliq 6 Lost in Latent Space: An Empirical Study of Latent Diffusion Models for Physics Emulation · 6 authors 1
Submitted by RajveeSheth 4 Eka-Eval : A Comprehensive Evaluation Framework for Large Language Models in Indian Languages · 4 authors 1
Submitted by violetxi 1 LitBench: A Benchmark and Dataset for Reliable Evaluation of Creative Writing · 6 authors 1

 nielsr
nielsr
nielsr
nielsr
nielsr
nielsr
 akhaliq
akhaliq
 RajveeSheth
RajveeSheth
 violetxi
violetxi