+  +
+
+
+[](https://mmpose.readthedocs.io/en/latest/?badge=latest)
+[](https://github.com/open-mmlab/mmpose/actions)
+[](https://codecov.io/gh/open-mmlab/mmpose)
+[](https://pypi.org/project/mmpose/)
+[](https://github.com/open-mmlab/mmpose/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://openxlab.org.cn/apps?search=mmpose)
+
+[📘文档](https://mmpose.readthedocs.io/zh_CN/latest/) |
+[🛠️安装](https://mmpose.readthedocs.io/zh_CN/latest/installation.html) |
+[👀模型库](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo.html) |
+[📜论文库](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html) |
+[🆕更新日志](https://mmpose.readthedocs.io/zh_CN/latest/notes/changelog.html) |
+[🤔报告问题](https://github.com/open-mmlab/mmpose/issues/new/choose) |
+[🔥RTMPose](/projects/rtmpose/)
+
+
+
+
+
+[](https://mmpose.readthedocs.io/en/latest/?badge=latest)
+[](https://github.com/open-mmlab/mmpose/actions)
+[](https://codecov.io/gh/open-mmlab/mmpose)
+[](https://pypi.org/project/mmpose/)
+[](https://github.com/open-mmlab/mmpose/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://openxlab.org.cn/apps?search=mmpose)
+
+[📘文档](https://mmpose.readthedocs.io/zh_CN/latest/) |
+[🛠️安装](https://mmpose.readthedocs.io/zh_CN/latest/installation.html) |
+[👀模型库](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo.html) |
+[📜论文库](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html) |
+[🆕更新日志](https://mmpose.readthedocs.io/zh_CN/latest/notes/changelog.html) |
+[🤔报告问题](https://github.com/open-mmlab/mmpose/issues/new/choose) |
+[🔥RTMPose](/projects/rtmpose/)
+
+
+
+
+
+## Introduction
+
+[English](./README.md) | 简体中文
+
+MMPose 是一款基于 PyTorch 的姿态分析的开源工具箱,是 [OpenMMLab](https://github.com/open-mmlab) 项目的成员之一。
+
+主分支代码目前支持 **PyTorch 1.8 以上**的版本。
+
+https://user-images.githubusercontent.com/15977946/124654387-0fd3c500-ded1-11eb-84f6-24eeddbf4d91.mp4
+
+
+ OpenMMLab 官网
+
+
+ HOT
+
+
+
+ OpenMMLab 开放平台
+
+
+ TRY IT OUT
+
+
+
+ 
 +
+ 




+
+
+## 最新进展
+
+- 发布了单阶段实时多人姿态估计模型 [RTMO](/projects/rtmo)。相比 RTMPose 在多人场景下性能更优
+
+ 
+
+- 发布了不同尺寸的 [RTMW](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.md) 模型,满足不同的使用场景。模型尺寸覆盖从 RTMW-m 到 RTMW-x 的模型,输入图像尺寸包含 256x192 和 384x288
+
+- 支持了 [PoseAnything](/projects/pose_anything) 的推理。[在线试玩](https://openxlab.org.cn/apps/detail/orhir/Pose-Anything)
+
+- 我们支持了两个新的数据集:
+
+ - (CVPR 2023) [ExLPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#exlpose-dataset)
+ - (ICCV 2023) [H3WB](/docs/en/dataset_zoo/3d_wholebody_keypoint.md)
+
+- 欢迎使用 [*MMPose 项目*](/projects/README.md)。在这里,您可以发现 MMPose 中的最新功能和算法,并且可以通过最快的方式与社区分享自己的创意和代码实现。向 MMPose 中添加新功能从此变得简单丝滑:
+
+ - 提供了一种简单迅捷的方式,将新的算法、功能和应用添加到 MMPose 中
+ - 更灵活的代码结构和风格,更少的限制,更简短的代码审核流程
+ - 通过独立项目的形式,利用 MMPose 的强大功能,同时不被代码框架所束缚
+ - 最新添加的项目包括:
+ - [RTMPose](/projects/rtmpose/)
+ - [RTMO](/projects/rtmo/)
+ - [PoseAnything](/projects/pose_anything/)
+ - [YOLOX-Pose](/projects/yolox_pose/)
+ - [MMPose4AIGC](/projects/mmpose4aigc/)
+ - [Simple Keypoints](/projects/skps/)
+ - [Just Dance](/projects/just_dance/)
+ - [Uniformer](/projects/uniformer/)
+ - 从简单的 [示例项目](/projects/example_project/) 开启您的 MMPose 代码贡献者之旅吧,让我们共同打造更好用的 MMPose!
+
+主要特性
+ +- **支持多种人体姿态分析相关任务** + + MMPose 支持当前学界广泛关注的主流姿态分析任务:主要包括 2D多人姿态估计、2D手部姿态估计、2D人脸关键点检测、133关键点的全身人体姿态估计、3D人体形状恢复、服饰关键点检测、动物关键点检测等。 + 具体请参考 [功能演示](demo/docs/zh_cn/)。 + +- **更高的精度和更快的速度** + + MMPose 复现了多种学界最先进的人体姿态分析模型,包括“自顶向下”和“自底向上”两大类算法。MMPose 相比于其他主流的代码库,具有更高的模型精度和训练速度。 + 具体请参考 [基准测试](docs/en/notes/benchmark.md)(英文)。 + +- **支持多样的数据集** + + MMPose 支持了很多主流数据集的准备和构建,如 COCO、 MPII 等。 具体请参考 [数据集](docs/zh_cn/dataset_zoo)。 + +- **模块化设计** + + MMPose 将统一的人体姿态分析框架解耦成不同的模块组件,通过组合不同的模块组件,用户可以便捷地构建自定义的人体姿态分析模型。 + +- **详尽的单元测试和文档** + + MMPose 提供了详尽的说明文档,API 接口说明,全面的单元测试,以供社区参考。 + ++ +- 2024-01-04:MMPose [v1.3.0](https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0) 正式发布了,主要更新包括: + + - 支持新数据集:ExLPose、H3WB + - 发布 RTMPose 系列新模型:RTMO、RTMW + - 支持新算法 PoseAnything + - 推理器 Inferencer 支持可选的进度条、提升与单阶段模型的适配性 + + 请查看完整的 [版本说明](https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0) 以了解更多 MMPose v1.3.0 带来的更新! + +## 0.x / 1.x 迁移 + +MMPose v1.0.0 是一个重大更新,包括了大量的 API 和配置文件的变化。目前 v1.0.0 中已经完成了一部分算法的迁移工作,剩余的算法将在后续的版本中陆续完成,我们将在这个 [Issue 页面](https://github.com/open-mmlab/mmpose/issues/2258) 中展示迁移进度。 + +如果您使用的算法还没有完成迁移,您也可以继续使用访问 [0.x 分支](https://github.com/open-mmlab/mmpose/tree/0.x) 和 [旧版文档](https://mmpose.readthedocs.io/zh_CN/0.x/) + +## 安装 + +关于安装的详细说明请参考[安装文档](https://mmpose.readthedocs.io/zh_CN/latest/installation.html)。 + +## 教程 + +我们提供了一系列简明的教程,帮助 MMPose 的新用户轻松上手使用: + +1. MMPose 的基本使用方法: + + - [20 分钟上手教程](https://mmpose.readthedocs.io/zh_CN/latest/guide_to_framework.html) + - [Demos](https://mmpose.readthedocs.io/zh_CN/latest/demos.html) + - [模型推理](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/inference.html) + - [配置文件](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/configs.html) + - [准备数据集](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/prepare_datasets.html) + - [训练与测试](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/train_and_test.html) + - [模型部署](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/how_to_deploy.html) + - [模型分析工具](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/model_analysis.html) + - [数据集标注与预处理脚本](https://mmpose.readthedocs.io/zh_CN/latest/user_guides/dataset_tools.html) + +2. 对于希望基于 MMPose 进行开发的研究者和开发者: + + - [编解码器](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/codecs.html) + - [数据流](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/dataflow.html) + - [实现新模型](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/implement_new_models.html) + - [自定义数据集](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/customize_datasets.html) + - [自定义数据变换](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/customize_transforms.html) + - [自定义指标](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/customize_evaluation.html) + - [自定义优化器](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/customize_optimizer.html) + - [自定义日志](https://mmpose.readthedocs.io/zh_CN/latest/advanced_guides/customize_logging.html) + - [迁移指南](https://mmpose.readthedocs.io/zh_CN/latest/migration.html) + +3. 对于希望加入开源社区,向 MMPose 贡献代码的研究者和开发者: + + - [参与贡献代码](https://mmpose.readthedocs.io/zh_CN/latest/contribution_guide.html) + +4. 对于使用过程中的常见问题: + + - [FAQ](https://mmpose.readthedocs.io/zh_CN/latest/faq.html) + +## 模型库 + +各个模型的结果和设置都可以在对应的 config(配置)目录下的 **README.md** 中查看。 +整体的概况也可也在 [模型库](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo.html) 页面中查看。 + +
+
+
+支持的算法
+ +- [x] [DeepPose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#deeppose-cvpr-2014) (CVPR'2014) +- [x] [CPM](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#cpm-cvpr-2016) (CVPR'2016) +- [x] [Hourglass](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#hourglass-eccv-2016) (ECCV'2016) +- [x] [SimpleBaseline3D](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#simplebaseline3d-iccv-2017) (ICCV'2017) +- [ ] [Associative Embedding](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#associative-embedding-nips-2017) (NeurIPS'2017) +- [x] [SimpleBaseline2D](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#simplebaseline2d-eccv-2018) (ECCV'2018) +- [x] [DSNT](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#dsnt-2018) (ArXiv'2021) +- [x] [HRNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#hrnet-cvpr-2019) (CVPR'2019) +- [x] [IPR](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#ipr-eccv-2018) (ECCV'2018) +- [x] [VideoPose3D](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#videopose3d-cvpr-2019) (CVPR'2019) +- [x] [HRNetv2](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#hrnetv2-tpami-2019) (TPAMI'2019) +- [x] [MSPN](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#mspn-arxiv-2019) (ArXiv'2019) +- [x] [SCNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#scnet-cvpr-2020) (CVPR'2020) +- [ ] [HigherHRNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#higherhrnet-cvpr-2020) (CVPR'2020) +- [x] [RSN](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#rsn-eccv-2020) (ECCV'2020) +- [x] [InterNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#internet-eccv-2020) (ECCV'2020) +- [ ] [VoxelPose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#voxelpose-eccv-2020) (ECCV'2020) +- [x] [LiteHRNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#litehrnet-cvpr-2021) (CVPR'2021) +- [x] [ViPNAS](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#vipnas-cvpr-2021) (CVPR'2021) +- [x] [Debias-IPR](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#debias-ipr-iccv-2021) (ICCV'2021) +- [x] [SimCC](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/algorithms.html#simcc-eccv-2022) (ECCV'2022) + +
+
+
+支持的技术
+ +- [x] [FPN](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#fpn-cvpr-2017) (CVPR'2017) +- [x] [FP16](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#fp16-arxiv-2017) (ArXiv'2017) +- [x] [Wingloss](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#wingloss-cvpr-2018) (CVPR'2018) +- [x] [AdaptiveWingloss](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#adaptivewingloss-iccv-2019) (ICCV'2019) +- [x] [DarkPose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#darkpose-cvpr-2020) (CVPR'2020) +- [x] [UDP](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#udp-cvpr-2020) (CVPR'2020) +- [x] [Albumentations](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#albumentations-information-2020) (Information'2020) +- [x] [SoftWingloss](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#softwingloss-tip-2021) (TIP'2021) +- [x] [RLE](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/techniques.html#rle-iccv-2021) (ICCV'2021) + +
+
+
+支持的数据集
+ +- [x] [AFLW](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#aflw-iccvw-2011) \[[主页](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/)\] (ICCVW'2011) +- [x] [sub-JHMDB](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#jhmdb-iccv-2013) \[[主页](http://jhmdb.is.tue.mpg.de/dataset)\] (ICCV'2013) +- [x] [COFW](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#cofw-iccv-2013) \[[主页](http://www.vision.caltech.edu/xpburgos/ICCV13/)\] (ICCV'2013) +- [x] [MPII](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#mpii-cvpr-2014) \[[主页](http://human-pose.mpi-inf.mpg.de/)\] (CVPR'2014) +- [x] [Human3.6M](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#human3-6m-tpami-2014) \[[主页](http://vision.imar.ro/human3.6m/description.php)\] (TPAMI'2014) +- [x] [COCO](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#coco-eccv-2014) \[[主页](http://cocodataset.org/)\] (ECCV'2014) +- [x] [CMU Panoptic](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#cmu-panoptic-iccv-2015) (ICCV'2015) +- [x] [DeepFashion](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#deepfashion-cvpr-2016) \[[主页](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html)\] (CVPR'2016) +- [x] [300W](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#300w-imavis-2016) \[[主页](https://ibug.doc.ic.ac.uk/resources/300-W/)\] (IMAVIS'2016) +- [x] [RHD](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#rhd-iccv-2017) \[[主页](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html)\] (ICCV'2017) +- [x] [CMU Panoptic](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#cmu-panoptic-iccv-2015) \[[主页](http://domedb.perception.cs.cmu.edu/)\] (ICCV'2015) +- [x] [AI Challenger](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#ai-challenger-arxiv-2017) \[[主页](https://github.com/AIChallenger/AI_Challenger_2017)\] (ArXiv'2017) +- [x] [MHP](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#mhp-acm-mm-2018) \[[主页](https://lv-mhp.github.io/dataset)\] (ACM MM'2018) +- [x] [WFLW](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#wflw-cvpr-2018) \[[主页](https://wywu.github.io/projects/LAB/WFLW.html)\] (CVPR'2018) +- [x] [PoseTrack18](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#posetrack18-cvpr-2018) \[[主页](https://posetrack.net/users/download.php)\] (CVPR'2018) +- [x] [OCHuman](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#ochuman-cvpr-2019) \[[主页](https://github.com/liruilong940607/OCHumanApi)\] (CVPR'2019) +- [x] [CrowdPose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#crowdpose-cvpr-2019) \[[主页](https://github.com/Jeff-sjtu/CrowdPose)\] (CVPR'2019) +- [x] [MPII-TRB](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#mpii-trb-iccv-2019) \[[主页](https://github.com/kennymckormick/Triplet-Representation-of-human-Body)\] (ICCV'2019) +- [x] [FreiHand](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#freihand-iccv-2019) \[[主页](https://lmb.informatik.uni-freiburg.de/projects/freihand/)\] (ICCV'2019) +- [x] [Animal-Pose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#animal-pose-iccv-2019) \[[主页](https://sites.google.com/view/animal-pose/)\] (ICCV'2019) +- [x] [OneHand10K](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#onehand10k-tcsvt-2019) \[[主页](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html)\] (TCSVT'2019) +- [x] [Vinegar Fly](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#vinegar-fly-nature-methods-2019) \[[主页](https://github.com/jgraving/DeepPoseKit-Data)\] (Nature Methods'2019) +- [x] [Desert Locust](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#desert-locust-elife-2019) \[[主页](https://github.com/jgraving/DeepPoseKit-Data)\] (Elife'2019) +- [x] [Grévy’s Zebra](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#grevys-zebra-elife-2019) \[[主页](https://github.com/jgraving/DeepPoseKit-Data)\] (Elife'2019) +- [x] [ATRW](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#atrw-acm-mm-2020) \[[主页](https://cvwc2019.github.io/challenge.html)\] (ACM MM'2020) +- [x] [Halpe](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#halpe-cvpr-2020) \[[主页](https://github.com/Fang-Haoshu/Halpe-FullBody/)\] (CVPR'2020) +- [x] [COCO-WholeBody](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#coco-wholebody-eccv-2020) \[[主页](https://github.com/jin-s13/COCO-WholeBody/)\] (ECCV'2020) +- [x] [MacaquePose](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#macaquepose-biorxiv-2020) \[[主页](http://www.pri.kyoto-u.ac.jp/datasets/macaquepose/index.html)\] (bioRxiv'2020) +- [x] [InterHand2.6M](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#interhand2-6m-eccv-2020) \[[主页](https://mks0601.github.io/InterHand2.6M/)\] (ECCV'2020) +- [x] [AP-10K](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#ap-10k-neurips-2021) \[[主页](https://github.com/AlexTheBad/AP-10K)\] (NeurIPS'2021) +- [x] [Horse-10](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#horse-10-wacv-2021) \[[主页](http://www.mackenziemathislab.org/horse10)\] (WACV'2021) +- [x] [Human-Art](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#human-art-cvpr-2023) \[[主页](https://idea-research.github.io/HumanArt/)\] (CVPR'2023) +- [x] [LaPa](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#lapa-aaai-2020) \[[主页](https://github.com/JDAI-CV/lapa-dataset)\] (AAAI'2020) +- [x] [UBody](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/datasets.html#ubody-cvpr-2023) \[[主页](https://github.com/IDEA-Research/OSX)\] (CVPR'2023) + +
+
+
+### 模型需求
+
+我们将跟进学界的最新进展,并支持更多算法和框架。如果您对 MMPose 有任何功能需求,请随时在 [MMPose Roadmap](https://github.com/open-mmlab/mmpose/issues/2258) 中留言。
+
+## 参与贡献
+
+我们非常欢迎用户对于 MMPose 做出的任何贡献,可以参考 [贡献指南](https://mmpose.readthedocs.io/zh_CN/latest/contribution_guide.html) 文件了解更多细节。
+
+## 致谢
+
+MMPose 是一款由不同学校和公司共同贡献的开源项目。我们感谢所有为项目提供算法复现和新功能支持的贡献者,以及提供宝贵反馈的用户。
+我们希望该工具箱和基准测试可以为社区提供灵活的代码工具,供用户复现现有算法并开发自己的新模型,从而不断为开源社区提供贡献。
+
+## 引用
+
+如果您觉得 MMPose 对您的研究有所帮助,请考虑引用它:
+
+```bibtex
+@misc{mmpose2020,
+ title={OpenMMLab Pose Estimation Toolbox and Benchmark},
+ author={MMPose Contributors},
+ howpublished = {\url{https://github.com/open-mmlab/mmpose}},
+ year={2020}
+}
+```
+
+## 许可证
+
+该项目采用 [Apache 2.0 license](LICENSE) 开源协议。
+
+## OpenMMLab的其他项目
+
+- [MMEngine](https://github.com/open-mmlab/mmengine): OpenMMLab 深度学习模型训练基础库
+- [MMCV](https://github.com/open-mmlab/mmcv): OpenMMLab 计算机视觉基础库
+- [MMPreTrain](https://github.com/open-mmlab/mmpretrain): OpenMMLab 深度学习预训练工具箱
+- [MMagic](https://github.com/open-mmlab/mmagic): OpenMMLab 新一代人工智能内容生成(AIGC)工具箱
+- [MMDetection](https://github.com/open-mmlab/mmdetection): OpenMMLab 目标检测工具箱
+- [MMDetection3D](https://github.com/open-mmlab/mmdetection3d): OpenMMLab 新一代通用 3D 目标检测平台
+- [MMRotate](https://github.com/open-mmlab/mmrotate): OpenMMLab 旋转框检测工具箱与测试基准
+- [MMTracking](https://github.com/open-mmlab/mmtracking): OpenMMLab 一体化视频目标感知平台
+- [MMSegmentation](https://github.com/open-mmlab/mmsegmentation): OpenMMLab 语义分割工具箱
+- [MMOCR](https://github.com/open-mmlab/mmocr): OpenMMLab 全流程文字检测识别理解工具包
+- [MMPose](https://github.com/open-mmlab/mmpose): OpenMMLab 姿态估计工具箱
+- [MMHuman3D](https://github.com/open-mmlab/mmhuman3d): OpenMMLab 人体参数化模型工具箱与测试基准
+- [MMFewShot](https://github.com/open-mmlab/mmfewshot): OpenMMLab 少样本学习工具箱与测试基准
+- [MMAction2](https://github.com/open-mmlab/mmaction2): OpenMMLab 新一代视频理解工具箱
+- [MMFlow](https://github.com/open-mmlab/mmflow): OpenMMLab 光流估计工具箱与测试基准
+- [MMDeploy](https://github.com/open-mmlab/mmdeploy): OpenMMLab 模型部署框架
+- [MMRazor](https://github.com/open-mmlab/mmrazor): OpenMMLab 模型压缩工具箱与测试基准
+- [MIM](https://github.com/open-mmlab/mim): OpenMMlab 项目、算法、模型的统一入口
+- [Playground](https://github.com/open-mmlab/playground): 收集和展示 OpenMMLab 相关的前沿、有趣的社区项目
+
+## 欢迎加入 OpenMMLab 社区
+
+扫描下方的二维码可关注 OpenMMLab 团队的 [知乎官方账号](https://www.zhihu.com/people/openmmlab),扫描下方微信二维码添加喵喵好友,进入 MMPose 微信交流社群。【加好友申请格式:研究方向+地区+学校/公司+姓名】
+
+支持的骨干网络
+ +- [x] [AlexNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#alexnet-neurips-2012) (NeurIPS'2012) +- [x] [VGG](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#vgg-iclr-2015) (ICLR'2015) +- [x] [ResNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#resnet-cvpr-2016) (CVPR'2016) +- [x] [ResNext](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#resnext-cvpr-2017) (CVPR'2017) +- [x] [SEResNet](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#seresnet-cvpr-2018) (CVPR'2018) +- [x] [ShufflenetV1](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#shufflenetv1-cvpr-2018) (CVPR'2018) +- [x] [ShufflenetV2](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#shufflenetv2-eccv-2018) (ECCV'2018) +- [x] [MobilenetV2](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#mobilenetv2-cvpr-2018) (CVPR'2018) +- [x] [ResNetV1D](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#resnetv1d-cvpr-2019) (CVPR'2019) +- [x] [ResNeSt](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#resnest-arxiv-2020) (ArXiv'2020) +- [x] [Swin](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#swin-cvpr-2021) (CVPR'2021) +- [x] [HRFormer](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#hrformer-nips-2021) (NIPS'2021) +- [x] [PVT](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#pvt-iccv-2021) (ICCV'2021) +- [x] [PVTV2](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo_papers/backbones.html#pvtv2-cvmj-2022) (CVMJ'2022) + +
+
 +
+
+
+我们会在 OpenMMLab 社区为大家
+
+- 📢 分享 AI 框架的前沿核心技术
+- 💻 解读 PyTorch 常用模块源码
+- 📰 发布 OpenMMLab 的相关新闻
+- 🚀 介绍 OpenMMLab 开发的前沿算法
+- 🏃 获取更高效的问题答疑和意见反馈
+- 🔥 提供与各行各业开发者充分交流的平台
+
+干货满满 📘,等你来撩 💗,OpenMMLab 社区期待您的加入 👬
diff --git a/configs/_base_/datasets/300w.py b/configs/_base_/datasets/300w.py
new file mode 100644
index 0000000000000000000000000000000000000000..2c3728da1d1555c3526ccbfca182385961e8b667
--- /dev/null
+++ b/configs/_base_/datasets/300w.py
@@ -0,0 +1,134 @@
+dataset_info = dict(
+ dataset_name='300w',
+ paper_info=dict(
+ author='Sagonas, Christos and Antonakos, Epameinondas '
+ 'and Tzimiropoulos, Georgios and Zafeiriou, Stefanos '
+ 'and Pantic, Maja',
+ title='300 faces in-the-wild challenge: '
+ 'Database and results',
+ container='Image and vision computing',
+ year='2016',
+ homepage='https://ibug.doc.ic.ac.uk/resources/300-W/',
+ ),
+ keypoint_info={
+ 0: dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap='kpt-16'),
+ 1: dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap='kpt-15'),
+ 2: dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap='kpt-14'),
+ 3: dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap='kpt-13'),
+ 4: dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap='kpt-12'),
+ 5: dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap='kpt-11'),
+ 6: dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap='kpt-10'),
+ 7: dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap='kpt-9'),
+ 8: dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap=''),
+ 9: dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap='kpt-7'),
+ 10:
+ dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap='kpt-6'),
+ 11:
+ dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap='kpt-5'),
+ 12:
+ dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap='kpt-4'),
+ 13:
+ dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap='kpt-3'),
+ 14:
+ dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap='kpt-2'),
+ 15:
+ dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap='kpt-1'),
+ 16:
+ dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap='kpt-0'),
+ 17:
+ dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap='kpt-26'),
+ 18:
+ dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap='kpt-25'),
+ 19:
+ dict(name='kpt-19', id=19, color=[255, 0, 0], type='', swap='kpt-24'),
+ 20:
+ dict(name='kpt-20', id=20, color=[255, 0, 0], type='', swap='kpt-23'),
+ 21:
+ dict(name='kpt-21', id=21, color=[255, 0, 0], type='', swap='kpt-22'),
+ 22:
+ dict(name='kpt-22', id=22, color=[255, 0, 0], type='', swap='kpt-21'),
+ 23:
+ dict(name='kpt-23', id=23, color=[255, 0, 0], type='', swap='kpt-20'),
+ 24:
+ dict(name='kpt-24', id=24, color=[255, 0, 0], type='', swap='kpt-19'),
+ 25:
+ dict(name='kpt-25', id=25, color=[255, 0, 0], type='', swap='kpt-18'),
+ 26:
+ dict(name='kpt-26', id=26, color=[255, 0, 0], type='', swap='kpt-17'),
+ 27: dict(name='kpt-27', id=27, color=[255, 0, 0], type='', swap=''),
+ 28: dict(name='kpt-28', id=28, color=[255, 0, 0], type='', swap=''),
+ 29: dict(name='kpt-29', id=29, color=[255, 0, 0], type='', swap=''),
+ 30: dict(name='kpt-30', id=30, color=[255, 0, 0], type='', swap=''),
+ 31:
+ dict(name='kpt-31', id=31, color=[255, 0, 0], type='', swap='kpt-35'),
+ 32:
+ dict(name='kpt-32', id=32, color=[255, 0, 0], type='', swap='kpt-34'),
+ 33: dict(name='kpt-33', id=33, color=[255, 0, 0], type='', swap=''),
+ 34:
+ dict(name='kpt-34', id=34, color=[255, 0, 0], type='', swap='kpt-32'),
+ 35:
+ dict(name='kpt-35', id=35, color=[255, 0, 0], type='', swap='kpt-31'),
+ 36:
+ dict(name='kpt-36', id=36, color=[255, 0, 0], type='', swap='kpt-45'),
+ 37:
+ dict(name='kpt-37', id=37, color=[255, 0, 0], type='', swap='kpt-44'),
+ 38:
+ dict(name='kpt-38', id=38, color=[255, 0, 0], type='', swap='kpt-43'),
+ 39:
+ dict(name='kpt-39', id=39, color=[255, 0, 0], type='', swap='kpt-42'),
+ 40:
+ dict(name='kpt-40', id=40, color=[255, 0, 0], type='', swap='kpt-47'),
+ 41: dict(
+ name='kpt-41', id=41, color=[255, 0, 0], type='', swap='kpt-46'),
+ 42: dict(
+ name='kpt-42', id=42, color=[255, 0, 0], type='', swap='kpt-39'),
+ 43: dict(
+ name='kpt-43', id=43, color=[255, 0, 0], type='', swap='kpt-38'),
+ 44: dict(
+ name='kpt-44', id=44, color=[255, 0, 0], type='', swap='kpt-37'),
+ 45: dict(
+ name='kpt-45', id=45, color=[255, 0, 0], type='', swap='kpt-36'),
+ 46: dict(
+ name='kpt-46', id=46, color=[255, 0, 0], type='', swap='kpt-41'),
+ 47: dict(
+ name='kpt-47', id=47, color=[255, 0, 0], type='', swap='kpt-40'),
+ 48: dict(
+ name='kpt-48', id=48, color=[255, 0, 0], type='', swap='kpt-54'),
+ 49: dict(
+ name='kpt-49', id=49, color=[255, 0, 0], type='', swap='kpt-53'),
+ 50: dict(
+ name='kpt-50', id=50, color=[255, 0, 0], type='', swap='kpt-52'),
+ 51: dict(name='kpt-51', id=51, color=[255, 0, 0], type='', swap=''),
+ 52: dict(
+ name='kpt-52', id=52, color=[255, 0, 0], type='', swap='kpt-50'),
+ 53: dict(
+ name='kpt-53', id=53, color=[255, 0, 0], type='', swap='kpt-49'),
+ 54: dict(
+ name='kpt-54', id=54, color=[255, 0, 0], type='', swap='kpt-48'),
+ 55: dict(
+ name='kpt-55', id=55, color=[255, 0, 0], type='', swap='kpt-59'),
+ 56: dict(
+ name='kpt-56', id=56, color=[255, 0, 0], type='', swap='kpt-58'),
+ 57: dict(name='kpt-57', id=57, color=[255, 0, 0], type='', swap=''),
+ 58: dict(
+ name='kpt-58', id=58, color=[255, 0, 0], type='', swap='kpt-56'),
+ 59: dict(
+ name='kpt-59', id=59, color=[255, 0, 0], type='', swap='kpt-55'),
+ 60: dict(
+ name='kpt-60', id=60, color=[255, 0, 0], type='', swap='kpt-64'),
+ 61: dict(
+ name='kpt-61', id=61, color=[255, 0, 0], type='', swap='kpt-63'),
+ 62: dict(name='kpt-62', id=62, color=[255, 0, 0], type='', swap=''),
+ 63: dict(
+ name='kpt-63', id=63, color=[255, 0, 0], type='', swap='kpt-61'),
+ 64: dict(
+ name='kpt-64', id=64, color=[255, 0, 0], type='', swap='kpt-60'),
+ 65: dict(
+ name='kpt-65', id=65, color=[255, 0, 0], type='', swap='kpt-67'),
+ 66: dict(name='kpt-66', id=66, color=[255, 0, 0], type='', swap=''),
+ 67: dict(
+ name='kpt-67', id=67, color=[255, 0, 0], type='', swap='kpt-65'),
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 68,
+ sigmas=[])
diff --git a/configs/_base_/datasets/300wlp.py b/configs/_base_/datasets/300wlp.py
new file mode 100644
index 0000000000000000000000000000000000000000..76eb4b70b1a342c17deeb65de79c3fc99ee09f8b
--- /dev/null
+++ b/configs/_base_/datasets/300wlp.py
@@ -0,0 +1,86 @@
+dataset_info = dict(
+ dataset_name='300wlp',
+ paper_info=dict(
+ author='Xiangyu Zhu1, and Zhen Lei1 '
+ 'and Xiaoming Liu2, and Hailin Shi1 '
+ 'and Stan Z. Li1',
+ title='300 faces in-the-wild challenge: '
+ 'Database and results',
+ container='Image and vision computing',
+ year='2016',
+ homepage='http://www.cbsr.ia.ac.cn/users/xiangyuzhu/'
+ 'projects/3DDFA/main.htm',
+ ),
+ keypoint_info={
+ 0: dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap=''),
+ 1: dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap=''),
+ 2: dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap=''),
+ 3: dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap=''),
+ 4: dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap=''),
+ 5: dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap=''),
+ 6: dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap=''),
+ 7: dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap=''),
+ 8: dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap=''),
+ 9: dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap=''),
+ 10: dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap=''),
+ 11: dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap=''),
+ 12: dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap=''),
+ 13: dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap=''),
+ 14: dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap=''),
+ 15: dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap=''),
+ 16: dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap=''),
+ 17: dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap=''),
+ 18: dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap=''),
+ 19: dict(name='kpt-19', id=19, color=[255, 0, 0], type='', swap=''),
+ 20: dict(name='kpt-20', id=20, color=[255, 0, 0], type='', swap=''),
+ 21: dict(name='kpt-21', id=21, color=[255, 0, 0], type='', swap=''),
+ 22: dict(name='kpt-22', id=22, color=[255, 0, 0], type='', swap=''),
+ 23: dict(name='kpt-23', id=23, color=[255, 0, 0], type='', swap=''),
+ 24: dict(name='kpt-24', id=24, color=[255, 0, 0], type='', swap=''),
+ 25: dict(name='kpt-25', id=25, color=[255, 0, 0], type='', swap=''),
+ 26: dict(name='kpt-26', id=26, color=[255, 0, 0], type='', swap=''),
+ 27: dict(name='kpt-27', id=27, color=[255, 0, 0], type='', swap=''),
+ 28: dict(name='kpt-28', id=28, color=[255, 0, 0], type='', swap=''),
+ 29: dict(name='kpt-29', id=29, color=[255, 0, 0], type='', swap=''),
+ 30: dict(name='kpt-30', id=30, color=[255, 0, 0], type='', swap=''),
+ 31: dict(name='kpt-31', id=31, color=[255, 0, 0], type='', swap=''),
+ 32: dict(name='kpt-32', id=32, color=[255, 0, 0], type='', swap=''),
+ 33: dict(name='kpt-33', id=33, color=[255, 0, 0], type='', swap=''),
+ 34: dict(name='kpt-34', id=34, color=[255, 0, 0], type='', swap=''),
+ 35: dict(name='kpt-35', id=35, color=[255, 0, 0], type='', swap=''),
+ 36: dict(name='kpt-36', id=36, color=[255, 0, 0], type='', swap=''),
+ 37: dict(name='kpt-37', id=37, color=[255, 0, 0], type='', swap=''),
+ 38: dict(name='kpt-38', id=38, color=[255, 0, 0], type='', swap=''),
+ 39: dict(name='kpt-39', id=39, color=[255, 0, 0], type='', swap=''),
+ 40: dict(name='kpt-40', id=40, color=[255, 0, 0], type='', swap=''),
+ 41: dict(name='kpt-41', id=41, color=[255, 0, 0], type='', swap=''),
+ 42: dict(name='kpt-42', id=42, color=[255, 0, 0], type='', swap=''),
+ 43: dict(name='kpt-43', id=43, color=[255, 0, 0], type='', swap=''),
+ 44: dict(name='kpt-44', id=44, color=[255, 0, 0], type='', swap=''),
+ 45: dict(name='kpt-45', id=45, color=[255, 0, 0], type='', swap=''),
+ 46: dict(name='kpt-46', id=46, color=[255, 0, 0], type='', swap=''),
+ 47: dict(name='kpt-47', id=47, color=[255, 0, 0], type='', swap=''),
+ 48: dict(name='kpt-48', id=48, color=[255, 0, 0], type='', swap=''),
+ 49: dict(name='kpt-49', id=49, color=[255, 0, 0], type='', swap=''),
+ 50: dict(name='kpt-50', id=50, color=[255, 0, 0], type='', swap=''),
+ 51: dict(name='kpt-51', id=51, color=[255, 0, 0], type='', swap=''),
+ 52: dict(name='kpt-52', id=52, color=[255, 0, 0], type='', swap=''),
+ 53: dict(name='kpt-53', id=53, color=[255, 0, 0], type='', swap=''),
+ 54: dict(name='kpt-54', id=54, color=[255, 0, 0], type='', swap=''),
+ 55: dict(name='kpt-55', id=55, color=[255, 0, 0], type='', swap=''),
+ 56: dict(name='kpt-56', id=56, color=[255, 0, 0], type='', swap=''),
+ 57: dict(name='kpt-57', id=57, color=[255, 0, 0], type='', swap=''),
+ 58: dict(name='kpt-58', id=58, color=[255, 0, 0], type='', swap=''),
+ 59: dict(name='kpt-59', id=59, color=[255, 0, 0], type='', swap=''),
+ 60: dict(name='kpt-60', id=60, color=[255, 0, 0], type='', swap=''),
+ 61: dict(name='kpt-61', id=61, color=[255, 0, 0], type='', swap=''),
+ 62: dict(name='kpt-62', id=62, color=[255, 0, 0], type='', swap=''),
+ 63: dict(name='kpt-63', id=63, color=[255, 0, 0], type='', swap=''),
+ 64: dict(name='kpt-64', id=64, color=[255, 0, 0], type='', swap=''),
+ 65: dict(name='kpt-65', id=65, color=[255, 0, 0], type='', swap=''),
+ 66: dict(name='kpt-66', id=66, color=[255, 0, 0], type='', swap=''),
+ 67: dict(name='kpt-67', id=67, color=[255, 0, 0], type='', swap=''),
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 68,
+ sigmas=[])
diff --git a/configs/_base_/datasets/aflw.py b/configs/_base_/datasets/aflw.py
new file mode 100644
index 0000000000000000000000000000000000000000..cf5e10964da700415f3613ca43a0755f5015d8f0
--- /dev/null
+++ b/configs/_base_/datasets/aflw.py
@@ -0,0 +1,44 @@
+dataset_info = dict(
+ dataset_name='aflw',
+ paper_info=dict(
+ author='Koestinger, Martin and Wohlhart, Paul and '
+ 'Roth, Peter M and Bischof, Horst',
+ title='Annotated facial landmarks in the wild: '
+ 'A large-scale, real-world database for facial '
+ 'landmark localization',
+ container='2011 IEEE international conference on computer '
+ 'vision workshops (ICCV workshops)',
+ year='2011',
+ homepage='https://www.tugraz.at/institute/icg/research/'
+ 'team-bischof/lrs/downloads/aflw/',
+ ),
+ keypoint_info={
+ 0: dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap='kpt-5'),
+ 1: dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap='kpt-4'),
+ 2: dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap='kpt-3'),
+ 3: dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap='kpt-2'),
+ 4: dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap='kpt-1'),
+ 5: dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap='kpt-0'),
+ 6: dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap='kpt-11'),
+ 7: dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap='kpt-10'),
+ 8: dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap='kpt-9'),
+ 9: dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap='kpt-8'),
+ 10:
+ dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap='kpt-7'),
+ 11:
+ dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap='kpt-6'),
+ 12:
+ dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap='kpt-14'),
+ 13: dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap=''),
+ 14:
+ dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap='kpt-12'),
+ 15:
+ dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap='kpt-17'),
+ 16: dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap=''),
+ 17:
+ dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap='kpt-15'),
+ 18: dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap='')
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 19,
+ sigmas=[])
diff --git a/configs/_base_/datasets/aic.py b/configs/_base_/datasets/aic.py
new file mode 100644
index 0000000000000000000000000000000000000000..9ecdbe3f0afeb19dbb7aed42653ce5efd85cfda3
--- /dev/null
+++ b/configs/_base_/datasets/aic.py
@@ -0,0 +1,140 @@
+dataset_info = dict(
+ dataset_name='aic',
+ paper_info=dict(
+ author='Wu, Jiahong and Zheng, He and Zhao, Bo and '
+ 'Li, Yixin and Yan, Baoming and Liang, Rui and '
+ 'Wang, Wenjia and Zhou, Shipei and Lin, Guosen and '
+ 'Fu, Yanwei and others',
+ title='Ai challenger: A large-scale dataset for going '
+ 'deeper in image understanding',
+ container='arXiv',
+ year='2017',
+ homepage='https://github.com/AIChallenger/AI_Challenger_2017',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_shoulder',
+ id=0,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 1:
+ dict(
+ name='right_elbow',
+ id=1,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 2:
+ dict(
+ name='right_wrist',
+ id=2,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 3:
+ dict(
+ name='left_shoulder',
+ id=3,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 4:
+ dict(
+ name='left_elbow',
+ id=4,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 5:
+ dict(
+ name='left_wrist',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 6:
+ dict(
+ name='right_hip',
+ id=6,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 7:
+ dict(
+ name='right_knee',
+ id=7,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 8:
+ dict(
+ name='right_ankle',
+ id=8,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 9:
+ dict(
+ name='left_hip',
+ id=9,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 10:
+ dict(
+ name='left_knee',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 11:
+ dict(
+ name='left_ankle',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 12:
+ dict(
+ name='head_top',
+ id=12,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 13:
+ dict(name='neck', id=13, color=[51, 153, 255], type='upper', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_wrist', 'right_elbow'), id=0, color=[255, 128, 0]),
+ 1: dict(
+ link=('right_elbow', 'right_shoulder'), id=1, color=[255, 128, 0]),
+ 2: dict(link=('right_shoulder', 'neck'), id=2, color=[51, 153, 255]),
+ 3: dict(link=('neck', 'left_shoulder'), id=3, color=[51, 153, 255]),
+ 4: dict(link=('left_shoulder', 'left_elbow'), id=4, color=[0, 255, 0]),
+ 5: dict(link=('left_elbow', 'left_wrist'), id=5, color=[0, 255, 0]),
+ 6: dict(link=('right_ankle', 'right_knee'), id=6, color=[255, 128, 0]),
+ 7: dict(link=('right_knee', 'right_hip'), id=7, color=[255, 128, 0]),
+ 8: dict(link=('right_hip', 'left_hip'), id=8, color=[51, 153, 255]),
+ 9: dict(link=('left_hip', 'left_knee'), id=9, color=[0, 255, 0]),
+ 10: dict(link=('left_knee', 'left_ankle'), id=10, color=[0, 255, 0]),
+ 11: dict(link=('head_top', 'neck'), id=11, color=[51, 153, 255]),
+ 12: dict(
+ link=('right_shoulder', 'right_hip'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('left_shoulder', 'left_hip'), id=13, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1.2, 1.5, 1., 1.2, 1.5, 1., 1.2, 1.5, 1., 1.2, 1.5, 1., 1.
+ ],
+
+ # 'https://github.com/AIChallenger/AI_Challenger_2017/blob/master/'
+ # 'Evaluation/keypoint_eval/keypoint_eval.py#L50'
+ # delta = 2 x sigma
+ sigmas=[
+ 0.01388152, 0.01515228, 0.01057665, 0.01417709, 0.01497891, 0.01402144,
+ 0.03909642, 0.03686941, 0.01981803, 0.03843971, 0.03412318, 0.02415081,
+ 0.01291456, 0.01236173
+ ])
diff --git a/configs/_base_/datasets/ak.py b/configs/_base_/datasets/ak.py
new file mode 100644
index 0000000000000000000000000000000000000000..e8b12f5a3125a7eec549a483d70077361f215205
--- /dev/null
+++ b/configs/_base_/datasets/ak.py
@@ -0,0 +1,267 @@
+dataset_info = dict(
+ dataset_name='Animal Kingdom',
+ paper_info=dict(
+ author='Singapore University of Technology and Design, Singapore.'
+ ' Xun Long Ng, Kian Eng Ong, Qichen Zheng,'
+ ' Yun Ni, Si Yong Yeo, Jun Liu.',
+ title='Animal Kingdom: '
+ 'A Large and Diverse Dataset for Animal Behavior Understanding',
+ container='Conference on Computer Vision '
+ 'and Pattern Recognition (CVPR)',
+ year='2022',
+ homepage='https://sutdcv.github.io/Animal-Kingdom',
+ version='1.0 (2022-06)',
+ date_created='2022-06',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='Head_Mid_Top',
+ id=0,
+ color=(225, 0, 255),
+ type='upper',
+ swap=''),
+ 1:
+ dict(
+ name='Eye_Left',
+ id=1,
+ color=[220, 20, 60],
+ type='upper',
+ swap='Eye_Right'),
+ 2:
+ dict(
+ name='Eye_Right',
+ id=2,
+ color=[0, 255, 255],
+ type='upper',
+ swap='Eye_Left'),
+ 3:
+ dict(
+ name='Mouth_Front_Top',
+ id=3,
+ color=(0, 255, 42),
+ type='upper',
+ swap=''),
+ 4:
+ dict(
+ name='Mouth_Back_Left',
+ id=4,
+ color=[221, 160, 221],
+ type='upper',
+ swap='Mouth_Back_Right'),
+ 5:
+ dict(
+ name='Mouth_Back_Right',
+ id=5,
+ color=[135, 206, 250],
+ type='upper',
+ swap='Mouth_Back_Left'),
+ 6:
+ dict(
+ name='Mouth_Front_Bottom',
+ id=6,
+ color=[50, 205, 50],
+ type='upper',
+ swap=''),
+ 7:
+ dict(
+ name='Shoulder_Left',
+ id=7,
+ color=[255, 182, 193],
+ type='upper',
+ swap='Shoulder_Right'),
+ 8:
+ dict(
+ name='Shoulder_Right',
+ id=8,
+ color=[0, 191, 255],
+ type='upper',
+ swap='Shoulder_Left'),
+ 9:
+ dict(
+ name='Elbow_Left',
+ id=9,
+ color=[255, 105, 180],
+ type='upper',
+ swap='Elbow_Right'),
+ 10:
+ dict(
+ name='Elbow_Right',
+ id=10,
+ color=[30, 144, 255],
+ type='upper',
+ swap='Elbow_Left'),
+ 11:
+ dict(
+ name='Wrist_Left',
+ id=11,
+ color=[255, 20, 147],
+ type='upper',
+ swap='Wrist_Right'),
+ 12:
+ dict(
+ name='Wrist_Right',
+ id=12,
+ color=[0, 0, 255],
+ type='upper',
+ swap='Wrist_Left'),
+ 13:
+ dict(
+ name='Torso_Mid_Back',
+ id=13,
+ color=(185, 3, 221),
+ type='upper',
+ swap=''),
+ 14:
+ dict(
+ name='Hip_Left',
+ id=14,
+ color=[255, 215, 0],
+ type='lower',
+ swap='Hip_Right'),
+ 15:
+ dict(
+ name='Hip_Right',
+ id=15,
+ color=[147, 112, 219],
+ type='lower',
+ swap='Hip_Left'),
+ 16:
+ dict(
+ name='Knee_Left',
+ id=16,
+ color=[255, 165, 0],
+ type='lower',
+ swap='Knee_Right'),
+ 17:
+ dict(
+ name='Knee_Right',
+ id=17,
+ color=[138, 43, 226],
+ type='lower',
+ swap='Knee_Left'),
+ 18:
+ dict(
+ name='Ankle_Left',
+ id=18,
+ color=[255, 140, 0],
+ type='lower',
+ swap='Ankle_Right'),
+ 19:
+ dict(
+ name='Ankle_Right',
+ id=19,
+ color=[128, 0, 128],
+ type='lower',
+ swap='Ankle_Left'),
+ 20:
+ dict(
+ name='Tail_Top_Back',
+ id=20,
+ color=(0, 251, 255),
+ type='lower',
+ swap=''),
+ 21:
+ dict(
+ name='Tail_Mid_Back',
+ id=21,
+ color=[32, 178, 170],
+ type='lower',
+ swap=''),
+ 22:
+ dict(
+ name='Tail_End_Back',
+ id=22,
+ color=(0, 102, 102),
+ type='lower',
+ swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('Eye_Left', 'Head_Mid_Top'), id=0, color=[220, 20, 60]),
+ 1:
+ dict(link=('Eye_Right', 'Head_Mid_Top'), id=1, color=[0, 255, 255]),
+ 2:
+ dict(
+ link=('Mouth_Front_Top', 'Mouth_Back_Left'),
+ id=2,
+ color=[221, 160, 221]),
+ 3:
+ dict(
+ link=('Mouth_Front_Top', 'Mouth_Back_Right'),
+ id=3,
+ color=[135, 206, 250]),
+ 4:
+ dict(
+ link=('Mouth_Front_Bottom', 'Mouth_Back_Left'),
+ id=4,
+ color=[221, 160, 221]),
+ 5:
+ dict(
+ link=('Mouth_Front_Bottom', 'Mouth_Back_Right'),
+ id=5,
+ color=[135, 206, 250]),
+ 6:
+ dict(
+ link=('Head_Mid_Top', 'Torso_Mid_Back'), id=6,
+ color=(225, 0, 255)),
+ 7:
+ dict(
+ link=('Torso_Mid_Back', 'Tail_Top_Back'),
+ id=7,
+ color=(185, 3, 221)),
+ 8:
+ dict(
+ link=('Tail_Top_Back', 'Tail_Mid_Back'), id=8,
+ color=(0, 251, 255)),
+ 9:
+ dict(
+ link=('Tail_Mid_Back', 'Tail_End_Back'),
+ id=9,
+ color=[32, 178, 170]),
+ 10:
+ dict(
+ link=('Head_Mid_Top', 'Shoulder_Left'),
+ id=10,
+ color=[255, 182, 193]),
+ 11:
+ dict(
+ link=('Head_Mid_Top', 'Shoulder_Right'),
+ id=11,
+ color=[0, 191, 255]),
+ 12:
+ dict(
+ link=('Shoulder_Left', 'Elbow_Left'), id=12, color=[255, 105,
+ 180]),
+ 13:
+ dict(
+ link=('Shoulder_Right', 'Elbow_Right'),
+ id=13,
+ color=[30, 144, 255]),
+ 14:
+ dict(link=('Elbow_Left', 'Wrist_Left'), id=14, color=[255, 20, 147]),
+ 15:
+ dict(link=('Elbow_Right', 'Wrist_Right'), id=15, color=[0, 0, 255]),
+ 16:
+ dict(link=('Tail_Top_Back', 'Hip_Left'), id=16, color=[255, 215, 0]),
+ 17:
+ dict(
+ link=('Tail_Top_Back', 'Hip_Right'), id=17, color=[147, 112, 219]),
+ 18:
+ dict(link=('Hip_Left', 'Knee_Left'), id=18, color=[255, 165, 0]),
+ 19:
+ dict(link=('Hip_Right', 'Knee_Right'), id=19, color=[138, 43, 226]),
+ 20:
+ dict(link=('Knee_Left', 'Ankle_Left'), id=20, color=[255, 140, 0]),
+ 21:
+ dict(link=('Knee_Right', 'Ankle_Right'), id=21, color=[128, 0, 128])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.,
+ 1., 1., 1., 1., 1.
+ ],
+ sigmas=[
+ 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025,
+ 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025, 0.025,
+ 0.025, 0.025, 0.025
+ ])
diff --git a/configs/_base_/datasets/animalpose.py b/configs/_base_/datasets/animalpose.py
new file mode 100644
index 0000000000000000000000000000000000000000..d5bb62d951b71da25e679bd755fe566216dc3f6f
--- /dev/null
+++ b/configs/_base_/datasets/animalpose.py
@@ -0,0 +1,166 @@
+dataset_info = dict(
+ dataset_name='animalpose',
+ paper_info=dict(
+ author='Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and '
+ 'Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing',
+ title='Cross-Domain Adaptation for Animal Pose Estimation',
+ container='The IEEE International Conference on '
+ 'Computer Vision (ICCV)',
+ year='2019',
+ homepage='https://sites.google.com/view/animal-pose/',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='L_Eye', id=0, color=[0, 255, 0], type='upper', swap='R_Eye'),
+ 1:
+ dict(
+ name='R_Eye',
+ id=1,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_Eye'),
+ 2:
+ dict(
+ name='L_EarBase',
+ id=2,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_EarBase'),
+ 3:
+ dict(
+ name='R_EarBase',
+ id=3,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_EarBase'),
+ 4:
+ dict(name='Nose', id=4, color=[51, 153, 255], type='upper', swap=''),
+ 5:
+ dict(name='Throat', id=5, color=[51, 153, 255], type='upper', swap=''),
+ 6:
+ dict(
+ name='TailBase', id=6, color=[51, 153, 255], type='lower',
+ swap=''),
+ 7:
+ dict(
+ name='Withers', id=7, color=[51, 153, 255], type='upper', swap=''),
+ 8:
+ dict(
+ name='L_F_Elbow',
+ id=8,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_F_Elbow'),
+ 9:
+ dict(
+ name='R_F_Elbow',
+ id=9,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_F_Elbow'),
+ 10:
+ dict(
+ name='L_B_Elbow',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_B_Elbow'),
+ 11:
+ dict(
+ name='R_B_Elbow',
+ id=11,
+ color=[255, 128, 0],
+ type='lower',
+ swap='L_B_Elbow'),
+ 12:
+ dict(
+ name='L_F_Knee',
+ id=12,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_F_Knee'),
+ 13:
+ dict(
+ name='R_F_Knee',
+ id=13,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_F_Knee'),
+ 14:
+ dict(
+ name='L_B_Knee',
+ id=14,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_B_Knee'),
+ 15:
+ dict(
+ name='R_B_Knee',
+ id=15,
+ color=[255, 128, 0],
+ type='lower',
+ swap='L_B_Knee'),
+ 16:
+ dict(
+ name='L_F_Paw',
+ id=16,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_F_Paw'),
+ 17:
+ dict(
+ name='R_F_Paw',
+ id=17,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_F_Paw'),
+ 18:
+ dict(
+ name='L_B_Paw',
+ id=18,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_B_Paw'),
+ 19:
+ dict(
+ name='R_B_Paw',
+ id=19,
+ color=[255, 128, 0],
+ type='lower',
+ swap='L_B_Paw')
+ },
+ skeleton_info={
+ 0: dict(link=('L_Eye', 'R_Eye'), id=0, color=[51, 153, 255]),
+ 1: dict(link=('L_Eye', 'L_EarBase'), id=1, color=[0, 255, 0]),
+ 2: dict(link=('R_Eye', 'R_EarBase'), id=2, color=[255, 128, 0]),
+ 3: dict(link=('L_Eye', 'Nose'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('R_Eye', 'Nose'), id=4, color=[255, 128, 0]),
+ 5: dict(link=('Nose', 'Throat'), id=5, color=[51, 153, 255]),
+ 6: dict(link=('Throat', 'Withers'), id=6, color=[51, 153, 255]),
+ 7: dict(link=('TailBase', 'Withers'), id=7, color=[51, 153, 255]),
+ 8: dict(link=('Throat', 'L_F_Elbow'), id=8, color=[0, 255, 0]),
+ 9: dict(link=('L_F_Elbow', 'L_F_Knee'), id=9, color=[0, 255, 0]),
+ 10: dict(link=('L_F_Knee', 'L_F_Paw'), id=10, color=[0, 255, 0]),
+ 11: dict(link=('Throat', 'R_F_Elbow'), id=11, color=[255, 128, 0]),
+ 12: dict(link=('R_F_Elbow', 'R_F_Knee'), id=12, color=[255, 128, 0]),
+ 13: dict(link=('R_F_Knee', 'R_F_Paw'), id=13, color=[255, 128, 0]),
+ 14: dict(link=('TailBase', 'L_B_Elbow'), id=14, color=[0, 255, 0]),
+ 15: dict(link=('L_B_Elbow', 'L_B_Knee'), id=15, color=[0, 255, 0]),
+ 16: dict(link=('L_B_Knee', 'L_B_Paw'), id=16, color=[0, 255, 0]),
+ 17: dict(link=('TailBase', 'R_B_Elbow'), id=17, color=[255, 128, 0]),
+ 18: dict(link=('R_B_Elbow', 'R_B_Knee'), id=18, color=[255, 128, 0]),
+ 19: dict(link=('R_B_Knee', 'R_B_Paw'), id=19, color=[255, 128, 0])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.2, 1.2,
+ 1.5, 1.5, 1.5, 1.5
+ ],
+
+ # Note: The original paper did not provide enough information about
+ # the sigmas. We modified from 'https://github.com/cocodataset/'
+ # 'cocoapi/blob/master/PythonAPI/pycocotools/cocoeval.py#L523'
+ sigmas=[
+ 0.025, 0.025, 0.026, 0.035, 0.035, 0.10, 0.10, 0.10, 0.107, 0.107,
+ 0.107, 0.107, 0.087, 0.087, 0.087, 0.087, 0.089, 0.089, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/ap10k.py b/configs/_base_/datasets/ap10k.py
new file mode 100644
index 0000000000000000000000000000000000000000..c0df579acbb8cf0de1ef62412ba865ee8710f0aa
--- /dev/null
+++ b/configs/_base_/datasets/ap10k.py
@@ -0,0 +1,142 @@
+dataset_info = dict(
+ dataset_name='ap10k',
+ paper_info=dict(
+ author='Yu, Hang and Xu, Yufei and Zhang, Jing and '
+ 'Zhao, Wei and Guan, Ziyu and Tao, Dacheng',
+ title='AP-10K: A Benchmark for Animal Pose Estimation in the Wild',
+ container='35th Conference on Neural Information Processing Systems '
+ '(NeurIPS 2021) Track on Datasets and Bench-marks.',
+ year='2021',
+ homepage='https://github.com/AlexTheBad/AP-10K',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='L_Eye', id=0, color=[0, 255, 0], type='upper', swap='R_Eye'),
+ 1:
+ dict(
+ name='R_Eye',
+ id=1,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_Eye'),
+ 2:
+ dict(name='Nose', id=2, color=[51, 153, 255], type='upper', swap=''),
+ 3:
+ dict(name='Neck', id=3, color=[51, 153, 255], type='upper', swap=''),
+ 4:
+ dict(
+ name='Root of tail',
+ id=4,
+ color=[51, 153, 255],
+ type='lower',
+ swap=''),
+ 5:
+ dict(
+ name='L_Shoulder',
+ id=5,
+ color=[51, 153, 255],
+ type='upper',
+ swap='R_Shoulder'),
+ 6:
+ dict(
+ name='L_Elbow',
+ id=6,
+ color=[51, 153, 255],
+ type='upper',
+ swap='R_Elbow'),
+ 7:
+ dict(
+ name='L_F_Paw',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_F_Paw'),
+ 8:
+ dict(
+ name='R_Shoulder',
+ id=8,
+ color=[0, 255, 0],
+ type='upper',
+ swap='L_Shoulder'),
+ 9:
+ dict(
+ name='R_Elbow',
+ id=9,
+ color=[255, 128, 0],
+ type='upper',
+ swap='L_Elbow'),
+ 10:
+ dict(
+ name='R_F_Paw',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_F_Paw'),
+ 11:
+ dict(
+ name='L_Hip',
+ id=11,
+ color=[255, 128, 0],
+ type='lower',
+ swap='R_Hip'),
+ 12:
+ dict(
+ name='L_Knee',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='R_Knee'),
+ 13:
+ dict(
+ name='L_B_Paw',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_B_Paw'),
+ 14:
+ dict(
+ name='R_Hip', id=14, color=[0, 255, 0], type='lower',
+ swap='L_Hip'),
+ 15:
+ dict(
+ name='R_Knee',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Knee'),
+ 16:
+ dict(
+ name='R_B_Paw',
+ id=16,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_B_Paw'),
+ },
+ skeleton_info={
+ 0: dict(link=('L_Eye', 'R_Eye'), id=0, color=[0, 0, 255]),
+ 1: dict(link=('L_Eye', 'Nose'), id=1, color=[0, 0, 255]),
+ 2: dict(link=('R_Eye', 'Nose'), id=2, color=[0, 0, 255]),
+ 3: dict(link=('Nose', 'Neck'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('Neck', 'Root of tail'), id=4, color=[0, 255, 0]),
+ 5: dict(link=('Neck', 'L_Shoulder'), id=5, color=[0, 255, 255]),
+ 6: dict(link=('L_Shoulder', 'L_Elbow'), id=6, color=[0, 255, 255]),
+ 7: dict(link=('L_Elbow', 'L_F_Paw'), id=6, color=[0, 255, 255]),
+ 8: dict(link=('Neck', 'R_Shoulder'), id=7, color=[6, 156, 250]),
+ 9: dict(link=('R_Shoulder', 'R_Elbow'), id=8, color=[6, 156, 250]),
+ 10: dict(link=('R_Elbow', 'R_F_Paw'), id=9, color=[6, 156, 250]),
+ 11: dict(link=('Root of tail', 'L_Hip'), id=10, color=[0, 255, 255]),
+ 12: dict(link=('L_Hip', 'L_Knee'), id=11, color=[0, 255, 255]),
+ 13: dict(link=('L_Knee', 'L_B_Paw'), id=12, color=[0, 255, 255]),
+ 14: dict(link=('Root of tail', 'R_Hip'), id=13, color=[6, 156, 250]),
+ 15: dict(link=('R_Hip', 'R_Knee'), id=14, color=[6, 156, 250]),
+ 16: dict(link=('R_Knee', 'R_B_Paw'), id=15, color=[6, 156, 250]),
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.025, 0.025, 0.026, 0.035, 0.035, 0.079, 0.072, 0.062, 0.079, 0.072,
+ 0.062, 0.107, 0.087, 0.089, 0.107, 0.087, 0.089
+ ])
diff --git a/configs/_base_/datasets/atrw.py b/configs/_base_/datasets/atrw.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ec71c8c508a0340139371a651ca2dd56eeae3cf
--- /dev/null
+++ b/configs/_base_/datasets/atrw.py
@@ -0,0 +1,144 @@
+dataset_info = dict(
+ dataset_name='atrw',
+ paper_info=dict(
+ author='Li, Shuyuan and Li, Jianguo and Tang, Hanlin '
+ 'and Qian, Rui and Lin, Weiyao',
+ title='ATRW: A Benchmark for Amur Tiger '
+ 'Re-identification in the Wild',
+ container='Proceedings of the 28th ACM '
+ 'International Conference on Multimedia',
+ year='2020',
+ homepage='https://cvwc2019.github.io/challenge.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left_ear',
+ id=0,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 1:
+ dict(
+ name='right_ear',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 2:
+ dict(name='nose', id=2, color=[51, 153, 255], type='upper', swap=''),
+ 3:
+ dict(
+ name='right_shoulder',
+ id=3,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 4:
+ dict(
+ name='right_front_paw',
+ id=4,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_front_paw'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='left_front_paw',
+ id=6,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_front_paw'),
+ 7:
+ dict(
+ name='right_hip',
+ id=7,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 8:
+ dict(
+ name='right_knee',
+ id=8,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 9:
+ dict(
+ name='right_back_paw',
+ id=9,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_back_paw'),
+ 10:
+ dict(
+ name='left_hip',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 11:
+ dict(
+ name='left_knee',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 12:
+ dict(
+ name='left_back_paw',
+ id=12,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_back_paw'),
+ 13:
+ dict(name='tail', id=13, color=[51, 153, 255], type='lower', swap=''),
+ 14:
+ dict(
+ name='center', id=14, color=[51, 153, 255], type='lower', swap=''),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ear', 'nose'), id=0, color=[51, 153, 255]),
+ 1:
+ dict(link=('right_ear', 'nose'), id=1, color=[51, 153, 255]),
+ 2:
+ dict(link=('nose', 'center'), id=2, color=[51, 153, 255]),
+ 3:
+ dict(
+ link=('left_shoulder', 'left_front_paw'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(link=('left_shoulder', 'center'), id=4, color=[0, 255, 0]),
+ 5:
+ dict(
+ link=('right_shoulder', 'right_front_paw'),
+ id=5,
+ color=[255, 128, 0]),
+ 6:
+ dict(link=('right_shoulder', 'center'), id=6, color=[255, 128, 0]),
+ 7:
+ dict(link=('tail', 'center'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('right_back_paw', 'right_knee'), id=8, color=[255, 128, 0]),
+ 9:
+ dict(link=('right_knee', 'right_hip'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('right_hip', 'tail'), id=10, color=[255, 128, 0]),
+ 11:
+ dict(link=('left_back_paw', 'left_knee'), id=11, color=[0, 255, 0]),
+ 12:
+ dict(link=('left_knee', 'left_hip'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('left_hip', 'tail'), id=13, color=[0, 255, 0]),
+ },
+ joint_weights=[1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.],
+ sigmas=[
+ 0.0277, 0.0823, 0.0831, 0.0202, 0.0716, 0.0263, 0.0646, 0.0302, 0.0440,
+ 0.0316, 0.0333, 0.0547, 0.0263, 0.0683, 0.0539
+ ])
diff --git a/configs/_base_/datasets/campus.py b/configs/_base_/datasets/campus.py
new file mode 100644
index 0000000000000000000000000000000000000000..334316e9c25282508767158d3fae30578ab3949d
--- /dev/null
+++ b/configs/_base_/datasets/campus.py
@@ -0,0 +1,151 @@
+dataset_info = dict(
+ dataset_name='campus',
+ paper_info=dict(
+ author='Belagiannis, Vasileios and Amin, Sikandar and Andriluka, '
+ 'Mykhaylo and Schiele, Bernt and Navab, Nassir and Ilic, Slobodan',
+ title='3D Pictorial Structures for Multiple Human Pose Estimation',
+ container='IEEE Computer Society Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2014',
+ homepage='http://campar.in.tum.de/Chair/MultiHumanPose',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 1:
+ dict(
+ name='right_knee',
+ id=1,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 2:
+ dict(
+ name='right_hip',
+ id=2,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 3:
+ dict(
+ name='left_hip',
+ id=3,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 4:
+ dict(
+ name='left_knee',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 5:
+ dict(
+ name='left_ankle',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 6:
+ dict(
+ name='right_wrist',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 7:
+ dict(
+ name='right_elbow',
+ id=7,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 8:
+ dict(
+ name='right_shoulder',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 9:
+ dict(
+ name='left_shoulder',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 10:
+ dict(
+ name='left_elbow',
+ id=10,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 11:
+ dict(
+ name='left_wrist',
+ id=11,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 12:
+ dict(
+ name='bottom_head',
+ id=12,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 13:
+ dict(
+ name='top_head',
+ id=13,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('right_knee', 'right_hip'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('left_hip', 'left_knee'), id=2, color=[0, 255, 0]),
+ 3:
+ dict(link=('left_knee', 'left_ankle'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(link=('right_hip', 'left_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('right_wrist', 'right_elbow'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(
+ link=('right_elbow', 'right_shoulder'), id=6, color=[255, 128, 0]),
+ 7:
+ dict(link=('left_shoulder', 'left_elbow'), id=7, color=[0, 255, 0]),
+ 8:
+ dict(link=('left_elbow', 'left_wrist'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(link=('right_hip', 'right_shoulder'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_hip', 'left_shoulder'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(
+ link=('right_shoulder', 'bottom_head'), id=11, color=[255, 128,
+ 0]),
+ 12:
+ dict(link=('left_shoulder', 'bottom_head'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('bottom_head', 'top_head'), id=13, color=[51, 153, 255]),
+ },
+ joint_weights=[
+ 1.5, 1.2, 1.0, 1.0, 1.2, 1.5, 1.5, 1.2, 1.0, 1.0, 1.2, 1.5, 1.0, 1.0
+ ],
+ sigmas=[
+ 0.089, 0.087, 0.107, 0.107, 0.087, 0.089, 0.062, 0.072, 0.079, 0.079,
+ 0.072, 0.062, 0.026, 0.026
+ ])
diff --git a/configs/_base_/datasets/coco.py b/configs/_base_/datasets/coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..865a95bc02fedd318f32d2e7aa8397147d78fdb5
--- /dev/null
+++ b/configs/_base_/datasets/coco.py
@@ -0,0 +1,181 @@
+dataset_info = dict(
+ dataset_name='coco',
+ paper_info=dict(
+ author='Lin, Tsung-Yi and Maire, Michael and '
+ 'Belongie, Serge and Hays, James and '
+ 'Perona, Pietro and Ramanan, Deva and '
+ r'Doll{\'a}r, Piotr and Zitnick, C Lawrence',
+ title='Microsoft coco: Common objects in context',
+ container='European conference on computer vision',
+ year='2014',
+ homepage='http://cocodataset.org/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/coco_aic.py b/configs/_base_/datasets/coco_aic.py
new file mode 100644
index 0000000000000000000000000000000000000000..a084247468dac1b766cbcf756b750aa3d3680b9d
--- /dev/null
+++ b/configs/_base_/datasets/coco_aic.py
@@ -0,0 +1,205 @@
+dataset_info = dict(
+ dataset_name='coco',
+ paper_info=[
+ dict(
+ author='Lin, Tsung-Yi and Maire, Michael and '
+ 'Belongie, Serge and Hays, James and '
+ 'Perona, Pietro and Ramanan, Deva and '
+ r'Doll{\'a}r, Piotr and Zitnick, C Lawrence',
+ title='Microsoft coco: Common objects in context',
+ container='European conference on computer vision',
+ year='2014',
+ homepage='http://cocodataset.org/',
+ ),
+ dict(
+ author='Wu, Jiahong and Zheng, He and Zhao, Bo and '
+ 'Li, Yixin and Yan, Baoming and Liang, Rui and '
+ 'Wang, Wenjia and Zhou, Shipei and Lin, Guosen and '
+ 'Fu, Yanwei and others',
+ title='Ai challenger: A large-scale dataset for going '
+ 'deeper in image understanding',
+ container='arXiv',
+ year='2017',
+ homepage='https://github.com/AIChallenger/AI_Challenger_2017',
+ ),
+ ],
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='head_top',
+ id=17,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 18:
+ dict(name='neck', id=18, color=[51, 153, 255], type='upper', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('head_top', 'neck'), id=11, color=[51, 153, 255]),
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5, 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.026, 0.026
+ ])
diff --git a/configs/_base_/datasets/coco_crop.py b/configs/_base_/datasets/coco_crop.py
new file mode 100644
index 0000000000000000000000000000000000000000..4c6eae09ec81ac404355c590ec2b1a50f7b7c840
--- /dev/null
+++ b/configs/_base_/datasets/coco_crop.py
@@ -0,0 +1,178 @@
+dataset_info = dict(
+ dataset_name='coco_crop',
+ paper_info=dict(
+ author='Purkrabek, Miroslav and Matas, Jiri',
+ title='ProbPose: A Probabilistic Approach to 2D Human Pose Estimation',
+ container='Conference on Computer Vision and Pattern Recognition',
+ year='2025',
+ homepage='https://MiraPurkrabek.github.io/ProbPose/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/coco_openpose.py b/configs/_base_/datasets/coco_openpose.py
new file mode 100644
index 0000000000000000000000000000000000000000..cce11b27f16b480facf8717055500d3e60c6ec4f
--- /dev/null
+++ b/configs/_base_/datasets/coco_openpose.py
@@ -0,0 +1,157 @@
+dataset_info = dict(
+ dataset_name='coco_openpose',
+ paper_info=dict(
+ author='Zhe, Cao and Tomas, Simon and '
+ 'Shih-En, Wei and Yaser, Sheikh',
+ title='OpenPose: Realtime Multi-Person 2D Pose '
+ 'Estimation using Part Affinity Fields',
+ container='IEEE Transactions on Pattern Analysis '
+ 'and Machine Intelligence',
+ year='2019',
+ homepage='https://github.com/CMU-Perceptual-Computing-Lab/openpose/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[255, 0, 0], type='upper', swap=''),
+ 1:
+ dict(name='neck', id=1, color=[255, 85, 0], type='upper', swap=''),
+ 2:
+ dict(
+ name='right_shoulder',
+ id=2,
+ color=[255, 170, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[255, 255, 0],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='right_wrist',
+ id=4,
+ color=[170, 255, 0],
+ type='upper',
+ swap='left_wrist'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[85, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='left_elbow',
+ id=6,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 7:
+ dict(
+ name='left_wrist',
+ id=7,
+ color=[0, 255, 85],
+ type='upper',
+ swap='right_wrist'),
+ 8:
+ dict(
+ name='right_hip',
+ id=8,
+ color=[0, 255, 170],
+ type='lower',
+ swap='left_hip'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[0, 255, 255],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='right_ankle',
+ id=10,
+ color=[0, 170, 255],
+ type='lower',
+ swap='left_ankle'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 85, 255],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='left_knee',
+ id=12,
+ color=[0, 0, 255],
+ type='lower',
+ swap='right_knee'),
+ 13:
+ dict(
+ name='left_ankle',
+ id=13,
+ color=[85, 0, 255],
+ type='lower',
+ swap='right_ankle'),
+ 14:
+ dict(
+ name='right_eye',
+ id=14,
+ color=[170, 0, 255],
+ type='upper',
+ swap='left_eye'),
+ 15:
+ dict(
+ name='left_eye',
+ id=15,
+ color=[255, 0, 255],
+ type='upper',
+ swap='right_eye'),
+ 16:
+ dict(
+ name='right_ear',
+ id=16,
+ color=[255, 0, 170],
+ type='upper',
+ swap='left_ear'),
+ 17:
+ dict(
+ name='left_ear',
+ id=17,
+ color=[255, 0, 85],
+ type='upper',
+ swap='right_ear'),
+ },
+ skeleton_info={
+ 0: dict(link=('neck', 'right_shoulder'), id=0, color=[255, 0, 0]),
+ 1: dict(link=('neck', 'left_shoulder'), id=1, color=[255, 85, 0]),
+ 2: dict(
+ link=('right_shoulder', 'right_elbow'), id=2, color=[255, 170, 0]),
+ 3:
+ dict(link=('right_elbow', 'right_wrist'), id=3, color=[255, 255, 0]),
+ 4:
+ dict(link=('left_shoulder', 'left_elbow'), id=4, color=[170, 255, 0]),
+ 5: dict(link=('left_elbow', 'left_wrist'), id=5, color=[85, 255, 0]),
+ 6: dict(link=('neck', 'right_hip'), id=6, color=[0, 255, 0]),
+ 7: dict(link=('right_hip', 'right_knee'), id=7, color=[0, 255, 85]),
+ 8: dict(link=('right_knee', 'right_ankle'), id=8, color=[0, 255, 170]),
+ 9: dict(link=('neck', 'left_hip'), id=9, color=[0, 255, 225]),
+ 10: dict(link=('left_hip', 'left_knee'), id=10, color=[0, 170, 255]),
+ 11: dict(link=('left_knee', 'left_ankle'), id=11, color=[0, 85, 255]),
+ 12: dict(link=('neck', 'nose'), id=12, color=[0, 0, 255]),
+ 13: dict(link=('nose', 'right_eye'), id=13, color=[255, 0, 170]),
+ 14: dict(link=('right_eye', 'right_ear'), id=14, color=[170, 0, 255]),
+ 15: dict(link=('nose', 'left_eye'), id=15, color=[255, 0, 255]),
+ 16: dict(link=('left_eye', 'left_ear'), id=16, color=[255, 0, 170]),
+ },
+ joint_weights=[1.] * 18,
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.082
+ ])
diff --git a/configs/_base_/datasets/coco_wholebody.py b/configs/_base_/datasets/coco_wholebody.py
new file mode 100644
index 0000000000000000000000000000000000000000..ef9b707017a24a1a133bb28566d212c618fee694
--- /dev/null
+++ b/configs/_base_/datasets/coco_wholebody.py
@@ -0,0 +1,1154 @@
+dataset_info = dict(
+ dataset_name='coco_wholebody',
+ paper_info=dict(
+ author='Jin, Sheng and Xu, Lumin and Xu, Jin and '
+ 'Wang, Can and Liu, Wentao and '
+ 'Qian, Chen and Ouyang, Wanli and Luo, Ping',
+ title='Whole-Body Human Pose Estimation in the Wild',
+ container='Proceedings of the European '
+ 'Conference on Computer Vision (ECCV)',
+ year='2020',
+ homepage='https://github.com/jin-s13/COCO-WholeBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='left_big_toe',
+ id=17,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 18:
+ dict(
+ name='left_small_toe',
+ id=18,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 19:
+ dict(
+ name='left_heel',
+ id=19,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_heel'),
+ 20:
+ dict(
+ name='right_big_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 21:
+ dict(
+ name='right_small_toe',
+ id=21,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 22:
+ dict(
+ name='right_heel',
+ id=22,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_heel'),
+ 23:
+ dict(
+ name='face-0',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='face-16'),
+ 24:
+ dict(
+ name='face-1',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='face-15'),
+ 25:
+ dict(
+ name='face-2',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='face-14'),
+ 26:
+ dict(
+ name='face-3',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='face-13'),
+ 27:
+ dict(
+ name='face-4',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='face-12'),
+ 28:
+ dict(
+ name='face-5',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='face-11'),
+ 29:
+ dict(
+ name='face-6',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='face-10'),
+ 30:
+ dict(
+ name='face-7',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='face-9'),
+ 31:
+ dict(name='face-8', id=31, color=[255, 255, 255], type='', swap=''),
+ 32:
+ dict(
+ name='face-9',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='face-7'),
+ 33:
+ dict(
+ name='face-10',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='face-6'),
+ 34:
+ dict(
+ name='face-11',
+ id=34,
+ color=[255, 255, 255],
+ type='',
+ swap='face-5'),
+ 35:
+ dict(
+ name='face-12',
+ id=35,
+ color=[255, 255, 255],
+ type='',
+ swap='face-4'),
+ 36:
+ dict(
+ name='face-13',
+ id=36,
+ color=[255, 255, 255],
+ type='',
+ swap='face-3'),
+ 37:
+ dict(
+ name='face-14',
+ id=37,
+ color=[255, 255, 255],
+ type='',
+ swap='face-2'),
+ 38:
+ dict(
+ name='face-15',
+ id=38,
+ color=[255, 255, 255],
+ type='',
+ swap='face-1'),
+ 39:
+ dict(
+ name='face-16',
+ id=39,
+ color=[255, 255, 255],
+ type='',
+ swap='face-0'),
+ 40:
+ dict(
+ name='face-17',
+ id=40,
+ color=[255, 255, 255],
+ type='',
+ swap='face-26'),
+ 41:
+ dict(
+ name='face-18',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='face-25'),
+ 42:
+ dict(
+ name='face-19',
+ id=42,
+ color=[255, 255, 255],
+ type='',
+ swap='face-24'),
+ 43:
+ dict(
+ name='face-20',
+ id=43,
+ color=[255, 255, 255],
+ type='',
+ swap='face-23'),
+ 44:
+ dict(
+ name='face-21',
+ id=44,
+ color=[255, 255, 255],
+ type='',
+ swap='face-22'),
+ 45:
+ dict(
+ name='face-22',
+ id=45,
+ color=[255, 255, 255],
+ type='',
+ swap='face-21'),
+ 46:
+ dict(
+ name='face-23',
+ id=46,
+ color=[255, 255, 255],
+ type='',
+ swap='face-20'),
+ 47:
+ dict(
+ name='face-24',
+ id=47,
+ color=[255, 255, 255],
+ type='',
+ swap='face-19'),
+ 48:
+ dict(
+ name='face-25',
+ id=48,
+ color=[255, 255, 255],
+ type='',
+ swap='face-18'),
+ 49:
+ dict(
+ name='face-26',
+ id=49,
+ color=[255, 255, 255],
+ type='',
+ swap='face-17'),
+ 50:
+ dict(name='face-27', id=50, color=[255, 255, 255], type='', swap=''),
+ 51:
+ dict(name='face-28', id=51, color=[255, 255, 255], type='', swap=''),
+ 52:
+ dict(name='face-29', id=52, color=[255, 255, 255], type='', swap=''),
+ 53:
+ dict(name='face-30', id=53, color=[255, 255, 255], type='', swap=''),
+ 54:
+ dict(
+ name='face-31',
+ id=54,
+ color=[255, 255, 255],
+ type='',
+ swap='face-35'),
+ 55:
+ dict(
+ name='face-32',
+ id=55,
+ color=[255, 255, 255],
+ type='',
+ swap='face-34'),
+ 56:
+ dict(name='face-33', id=56, color=[255, 255, 255], type='', swap=''),
+ 57:
+ dict(
+ name='face-34',
+ id=57,
+ color=[255, 255, 255],
+ type='',
+ swap='face-32'),
+ 58:
+ dict(
+ name='face-35',
+ id=58,
+ color=[255, 255, 255],
+ type='',
+ swap='face-31'),
+ 59:
+ dict(
+ name='face-36',
+ id=59,
+ color=[255, 255, 255],
+ type='',
+ swap='face-45'),
+ 60:
+ dict(
+ name='face-37',
+ id=60,
+ color=[255, 255, 255],
+ type='',
+ swap='face-44'),
+ 61:
+ dict(
+ name='face-38',
+ id=61,
+ color=[255, 255, 255],
+ type='',
+ swap='face-43'),
+ 62:
+ dict(
+ name='face-39',
+ id=62,
+ color=[255, 255, 255],
+ type='',
+ swap='face-42'),
+ 63:
+ dict(
+ name='face-40',
+ id=63,
+ color=[255, 255, 255],
+ type='',
+ swap='face-47'),
+ 64:
+ dict(
+ name='face-41',
+ id=64,
+ color=[255, 255, 255],
+ type='',
+ swap='face-46'),
+ 65:
+ dict(
+ name='face-42',
+ id=65,
+ color=[255, 255, 255],
+ type='',
+ swap='face-39'),
+ 66:
+ dict(
+ name='face-43',
+ id=66,
+ color=[255, 255, 255],
+ type='',
+ swap='face-38'),
+ 67:
+ dict(
+ name='face-44',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='face-37'),
+ 68:
+ dict(
+ name='face-45',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='face-36'),
+ 69:
+ dict(
+ name='face-46',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='face-41'),
+ 70:
+ dict(
+ name='face-47',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='face-40'),
+ 71:
+ dict(
+ name='face-48',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='face-54'),
+ 72:
+ dict(
+ name='face-49',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='face-53'),
+ 73:
+ dict(
+ name='face-50',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='face-52'),
+ 74:
+ dict(name='face-51', id=74, color=[255, 255, 255], type='', swap=''),
+ 75:
+ dict(
+ name='face-52',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='face-50'),
+ 76:
+ dict(
+ name='face-53',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='face-49'),
+ 77:
+ dict(
+ name='face-54',
+ id=77,
+ color=[255, 255, 255],
+ type='',
+ swap='face-48'),
+ 78:
+ dict(
+ name='face-55',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='face-59'),
+ 79:
+ dict(
+ name='face-56',
+ id=79,
+ color=[255, 255, 255],
+ type='',
+ swap='face-58'),
+ 80:
+ dict(name='face-57', id=80, color=[255, 255, 255], type='', swap=''),
+ 81:
+ dict(
+ name='face-58',
+ id=81,
+ color=[255, 255, 255],
+ type='',
+ swap='face-56'),
+ 82:
+ dict(
+ name='face-59',
+ id=82,
+ color=[255, 255, 255],
+ type='',
+ swap='face-55'),
+ 83:
+ dict(
+ name='face-60',
+ id=83,
+ color=[255, 255, 255],
+ type='',
+ swap='face-64'),
+ 84:
+ dict(
+ name='face-61',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='face-63'),
+ 85:
+ dict(name='face-62', id=85, color=[255, 255, 255], type='', swap=''),
+ 86:
+ dict(
+ name='face-63',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='face-61'),
+ 87:
+ dict(
+ name='face-64',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='face-60'),
+ 88:
+ dict(
+ name='face-65',
+ id=88,
+ color=[255, 255, 255],
+ type='',
+ swap='face-67'),
+ 89:
+ dict(name='face-66', id=89, color=[255, 255, 255], type='', swap=''),
+ 90:
+ dict(
+ name='face-67',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='face-65'),
+ 91:
+ dict(
+ name='left_hand_root',
+ id=91,
+ color=[255, 255, 255],
+ type='',
+ swap='right_hand_root'),
+ 92:
+ dict(
+ name='left_thumb1',
+ id=92,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb1'),
+ 93:
+ dict(
+ name='left_thumb2',
+ id=93,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb2'),
+ 94:
+ dict(
+ name='left_thumb3',
+ id=94,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb3'),
+ 95:
+ dict(
+ name='left_thumb4',
+ id=95,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb4'),
+ 96:
+ dict(
+ name='left_forefinger1',
+ id=96,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger1'),
+ 97:
+ dict(
+ name='left_forefinger2',
+ id=97,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger2'),
+ 98:
+ dict(
+ name='left_forefinger3',
+ id=98,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger3'),
+ 99:
+ dict(
+ name='left_forefinger4',
+ id=99,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger4'),
+ 100:
+ dict(
+ name='left_middle_finger1',
+ id=100,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 101:
+ dict(
+ name='left_middle_finger2',
+ id=101,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 102:
+ dict(
+ name='left_middle_finger3',
+ id=102,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 103:
+ dict(
+ name='left_middle_finger4',
+ id=103,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 104:
+ dict(
+ name='left_ring_finger1',
+ id=104,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger1'),
+ 105:
+ dict(
+ name='left_ring_finger2',
+ id=105,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger2'),
+ 106:
+ dict(
+ name='left_ring_finger3',
+ id=106,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger3'),
+ 107:
+ dict(
+ name='left_ring_finger4',
+ id=107,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger4'),
+ 108:
+ dict(
+ name='left_pinky_finger1',
+ id=108,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger1'),
+ 109:
+ dict(
+ name='left_pinky_finger2',
+ id=109,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger2'),
+ 110:
+ dict(
+ name='left_pinky_finger3',
+ id=110,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger3'),
+ 111:
+ dict(
+ name='left_pinky_finger4',
+ id=111,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger4'),
+ 112:
+ dict(
+ name='right_hand_root',
+ id=112,
+ color=[255, 255, 255],
+ type='',
+ swap='left_hand_root'),
+ 113:
+ dict(
+ name='right_thumb1',
+ id=113,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb1'),
+ 114:
+ dict(
+ name='right_thumb2',
+ id=114,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb2'),
+ 115:
+ dict(
+ name='right_thumb3',
+ id=115,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb3'),
+ 116:
+ dict(
+ name='right_thumb4',
+ id=116,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb4'),
+ 117:
+ dict(
+ name='right_forefinger1',
+ id=117,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger1'),
+ 118:
+ dict(
+ name='right_forefinger2',
+ id=118,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger2'),
+ 119:
+ dict(
+ name='right_forefinger3',
+ id=119,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger3'),
+ 120:
+ dict(
+ name='right_forefinger4',
+ id=120,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger4'),
+ 121:
+ dict(
+ name='right_middle_finger1',
+ id=121,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 122:
+ dict(
+ name='right_middle_finger2',
+ id=122,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 123:
+ dict(
+ name='right_middle_finger3',
+ id=123,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 124:
+ dict(
+ name='right_middle_finger4',
+ id=124,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 125:
+ dict(
+ name='right_ring_finger1',
+ id=125,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger1'),
+ 126:
+ dict(
+ name='right_ring_finger2',
+ id=126,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger2'),
+ 127:
+ dict(
+ name='right_ring_finger3',
+ id=127,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger3'),
+ 128:
+ dict(
+ name='right_ring_finger4',
+ id=128,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger4'),
+ 129:
+ dict(
+ name='right_pinky_finger1',
+ id=129,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger1'),
+ 130:
+ dict(
+ name='right_pinky_finger2',
+ id=130,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger2'),
+ 131:
+ dict(
+ name='right_pinky_finger3',
+ id=131,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger3'),
+ 132:
+ dict(
+ name='right_pinky_finger4',
+ id=132,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger4')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ankle', 'left_big_toe'), id=19, color=[0, 255, 0]),
+ 20:
+ dict(link=('left_ankle', 'left_small_toe'), id=20, color=[0, 255, 0]),
+ 21:
+ dict(link=('left_ankle', 'left_heel'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(
+ link=('right_ankle', 'right_big_toe'), id=22, color=[255, 128, 0]),
+ 23:
+ dict(
+ link=('right_ankle', 'right_small_toe'),
+ id=23,
+ color=[255, 128, 0]),
+ 24:
+ dict(link=('right_ankle', 'right_heel'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(
+ link=('left_hand_root', 'left_thumb1'), id=25, color=[255, 128,
+ 0]),
+ 26:
+ dict(link=('left_thumb1', 'left_thumb2'), id=26, color=[255, 128, 0]),
+ 27:
+ dict(link=('left_thumb2', 'left_thumb3'), id=27, color=[255, 128, 0]),
+ 28:
+ dict(link=('left_thumb3', 'left_thumb4'), id=28, color=[255, 128, 0]),
+ 29:
+ dict(
+ link=('left_hand_root', 'left_forefinger1'),
+ id=29,
+ color=[255, 153, 255]),
+ 30:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=30,
+ color=[255, 153, 255]),
+ 31:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=31,
+ color=[255, 153, 255]),
+ 32:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=32,
+ color=[255, 153, 255]),
+ 33:
+ dict(
+ link=('left_hand_root', 'left_middle_finger1'),
+ id=33,
+ color=[102, 178, 255]),
+ 34:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=34,
+ color=[102, 178, 255]),
+ 35:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=35,
+ color=[102, 178, 255]),
+ 36:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=36,
+ color=[102, 178, 255]),
+ 37:
+ dict(
+ link=('left_hand_root', 'left_ring_finger1'),
+ id=37,
+ color=[255, 51, 51]),
+ 38:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=38,
+ color=[255, 51, 51]),
+ 39:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=39,
+ color=[255, 51, 51]),
+ 40:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=40,
+ color=[255, 51, 51]),
+ 41:
+ dict(
+ link=('left_hand_root', 'left_pinky_finger1'),
+ id=41,
+ color=[0, 255, 0]),
+ 42:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=42,
+ color=[0, 255, 0]),
+ 43:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=43,
+ color=[0, 255, 0]),
+ 44:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=44,
+ color=[0, 255, 0]),
+ 45:
+ dict(
+ link=('right_hand_root', 'right_thumb1'),
+ id=45,
+ color=[255, 128, 0]),
+ 46:
+ dict(
+ link=('right_thumb1', 'right_thumb2'), id=46, color=[255, 128, 0]),
+ 47:
+ dict(
+ link=('right_thumb2', 'right_thumb3'), id=47, color=[255, 128, 0]),
+ 48:
+ dict(
+ link=('right_thumb3', 'right_thumb4'), id=48, color=[255, 128, 0]),
+ 49:
+ dict(
+ link=('right_hand_root', 'right_forefinger1'),
+ id=49,
+ color=[255, 153, 255]),
+ 50:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=50,
+ color=[255, 153, 255]),
+ 51:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=51,
+ color=[255, 153, 255]),
+ 52:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=52,
+ color=[255, 153, 255]),
+ 53:
+ dict(
+ link=('right_hand_root', 'right_middle_finger1'),
+ id=53,
+ color=[102, 178, 255]),
+ 54:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=54,
+ color=[102, 178, 255]),
+ 55:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=55,
+ color=[102, 178, 255]),
+ 56:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=56,
+ color=[102, 178, 255]),
+ 57:
+ dict(
+ link=('right_hand_root', 'right_ring_finger1'),
+ id=57,
+ color=[255, 51, 51]),
+ 58:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=58,
+ color=[255, 51, 51]),
+ 59:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=59,
+ color=[255, 51, 51]),
+ 60:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=60,
+ color=[255, 51, 51]),
+ 61:
+ dict(
+ link=('right_hand_root', 'right_pinky_finger1'),
+ id=61,
+ color=[0, 255, 0]),
+ 62:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=62,
+ color=[0, 255, 0]),
+ 63:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=63,
+ color=[0, 255, 0]),
+ 64:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=64,
+ color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 133,
+ # 'https://github.com/jin-s13/COCO-WholeBody/blob/master/'
+ # 'evaluation/myeval_wholebody.py#L175'
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.068, 0.066, 0.066,
+ 0.092, 0.094, 0.094, 0.042, 0.043, 0.044, 0.043, 0.040, 0.035, 0.031,
+ 0.025, 0.020, 0.023, 0.029, 0.032, 0.037, 0.038, 0.043, 0.041, 0.045,
+ 0.013, 0.012, 0.011, 0.011, 0.012, 0.012, 0.011, 0.011, 0.013, 0.015,
+ 0.009, 0.007, 0.007, 0.007, 0.012, 0.009, 0.008, 0.016, 0.010, 0.017,
+ 0.011, 0.009, 0.011, 0.009, 0.007, 0.013, 0.008, 0.011, 0.012, 0.010,
+ 0.034, 0.008, 0.008, 0.009, 0.008, 0.008, 0.007, 0.010, 0.008, 0.009,
+ 0.009, 0.009, 0.007, 0.007, 0.008, 0.011, 0.008, 0.008, 0.008, 0.01,
+ 0.008, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024, 0.035,
+ 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02, 0.019,
+ 0.022, 0.031, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024,
+ 0.035, 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02,
+ 0.019, 0.022, 0.031
+ ])
diff --git a/configs/_base_/datasets/coco_wholebody_face.py b/configs/_base_/datasets/coco_wholebody_face.py
new file mode 100644
index 0000000000000000000000000000000000000000..a3fe1e5b336d8ddd668d47123f5c0ceeff580914
--- /dev/null
+++ b/configs/_base_/datasets/coco_wholebody_face.py
@@ -0,0 +1,154 @@
+dataset_info = dict(
+ dataset_name='coco_wholebody_face',
+ paper_info=dict(
+ author='Jin, Sheng and Xu, Lumin and Xu, Jin and '
+ 'Wang, Can and Liu, Wentao and '
+ 'Qian, Chen and Ouyang, Wanli and Luo, Ping',
+ title='Whole-Body Human Pose Estimation in the Wild',
+ container='Proceedings of the European '
+ 'Conference on Computer Vision (ECCV)',
+ year='2020',
+ homepage='https://github.com/jin-s13/COCO-WholeBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='face-0', id=0, color=[255, 0, 0], type='', swap='face-16'),
+ 1:
+ dict(name='face-1', id=1, color=[255, 0, 0], type='', swap='face-15'),
+ 2:
+ dict(name='face-2', id=2, color=[255, 0, 0], type='', swap='face-14'),
+ 3:
+ dict(name='face-3', id=3, color=[255, 0, 0], type='', swap='face-13'),
+ 4:
+ dict(name='face-4', id=4, color=[255, 0, 0], type='', swap='face-12'),
+ 5:
+ dict(name='face-5', id=5, color=[255, 0, 0], type='', swap='face-11'),
+ 6:
+ dict(name='face-6', id=6, color=[255, 0, 0], type='', swap='face-10'),
+ 7:
+ dict(name='face-7', id=7, color=[255, 0, 0], type='', swap='face-9'),
+ 8: dict(name='face-8', id=8, color=[255, 0, 0], type='', swap=''),
+ 9:
+ dict(name='face-9', id=9, color=[255, 0, 0], type='', swap='face-7'),
+ 10:
+ dict(name='face-10', id=10, color=[255, 0, 0], type='', swap='face-6'),
+ 11:
+ dict(name='face-11', id=11, color=[255, 0, 0], type='', swap='face-5'),
+ 12:
+ dict(name='face-12', id=12, color=[255, 0, 0], type='', swap='face-4'),
+ 13:
+ dict(name='face-13', id=13, color=[255, 0, 0], type='', swap='face-3'),
+ 14:
+ dict(name='face-14', id=14, color=[255, 0, 0], type='', swap='face-2'),
+ 15:
+ dict(name='face-15', id=15, color=[255, 0, 0], type='', swap='face-1'),
+ 16:
+ dict(name='face-16', id=16, color=[255, 0, 0], type='', swap='face-0'),
+ 17: dict(
+ name='face-17', id=17, color=[255, 0, 0], type='', swap='face-26'),
+ 18: dict(
+ name='face-18', id=18, color=[255, 0, 0], type='', swap='face-25'),
+ 19: dict(
+ name='face-19', id=19, color=[255, 0, 0], type='', swap='face-24'),
+ 20: dict(
+ name='face-20', id=20, color=[255, 0, 0], type='', swap='face-23'),
+ 21: dict(
+ name='face-21', id=21, color=[255, 0, 0], type='', swap='face-22'),
+ 22: dict(
+ name='face-22', id=22, color=[255, 0, 0], type='', swap='face-21'),
+ 23: dict(
+ name='face-23', id=23, color=[255, 0, 0], type='', swap='face-20'),
+ 24: dict(
+ name='face-24', id=24, color=[255, 0, 0], type='', swap='face-19'),
+ 25: dict(
+ name='face-25', id=25, color=[255, 0, 0], type='', swap='face-18'),
+ 26: dict(
+ name='face-26', id=26, color=[255, 0, 0], type='', swap='face-17'),
+ 27: dict(name='face-27', id=27, color=[255, 0, 0], type='', swap=''),
+ 28: dict(name='face-28', id=28, color=[255, 0, 0], type='', swap=''),
+ 29: dict(name='face-29', id=29, color=[255, 0, 0], type='', swap=''),
+ 30: dict(name='face-30', id=30, color=[255, 0, 0], type='', swap=''),
+ 31: dict(
+ name='face-31', id=31, color=[255, 0, 0], type='', swap='face-35'),
+ 32: dict(
+ name='face-32', id=32, color=[255, 0, 0], type='', swap='face-34'),
+ 33: dict(name='face-33', id=33, color=[255, 0, 0], type='', swap=''),
+ 34: dict(
+ name='face-34', id=34, color=[255, 0, 0], type='', swap='face-32'),
+ 35: dict(
+ name='face-35', id=35, color=[255, 0, 0], type='', swap='face-31'),
+ 36: dict(
+ name='face-36', id=36, color=[255, 0, 0], type='', swap='face-45'),
+ 37: dict(
+ name='face-37', id=37, color=[255, 0, 0], type='', swap='face-44'),
+ 38: dict(
+ name='face-38', id=38, color=[255, 0, 0], type='', swap='face-43'),
+ 39: dict(
+ name='face-39', id=39, color=[255, 0, 0], type='', swap='face-42'),
+ 40: dict(
+ name='face-40', id=40, color=[255, 0, 0], type='', swap='face-47'),
+ 41: dict(
+ name='face-41', id=41, color=[255, 0, 0], type='', swap='face-46'),
+ 42: dict(
+ name='face-42', id=42, color=[255, 0, 0], type='', swap='face-39'),
+ 43: dict(
+ name='face-43', id=43, color=[255, 0, 0], type='', swap='face-38'),
+ 44: dict(
+ name='face-44', id=44, color=[255, 0, 0], type='', swap='face-37'),
+ 45: dict(
+ name='face-45', id=45, color=[255, 0, 0], type='', swap='face-36'),
+ 46: dict(
+ name='face-46', id=46, color=[255, 0, 0], type='', swap='face-41'),
+ 47: dict(
+ name='face-47', id=47, color=[255, 0, 0], type='', swap='face-40'),
+ 48: dict(
+ name='face-48', id=48, color=[255, 0, 0], type='', swap='face-54'),
+ 49: dict(
+ name='face-49', id=49, color=[255, 0, 0], type='', swap='face-53'),
+ 50: dict(
+ name='face-50', id=50, color=[255, 0, 0], type='', swap='face-52'),
+ 51: dict(name='face-51', id=52, color=[255, 0, 0], type='', swap=''),
+ 52: dict(
+ name='face-52', id=52, color=[255, 0, 0], type='', swap='face-50'),
+ 53: dict(
+ name='face-53', id=53, color=[255, 0, 0], type='', swap='face-49'),
+ 54: dict(
+ name='face-54', id=54, color=[255, 0, 0], type='', swap='face-48'),
+ 55: dict(
+ name='face-55', id=55, color=[255, 0, 0], type='', swap='face-59'),
+ 56: dict(
+ name='face-56', id=56, color=[255, 0, 0], type='', swap='face-58'),
+ 57: dict(name='face-57', id=57, color=[255, 0, 0], type='', swap=''),
+ 58: dict(
+ name='face-58', id=58, color=[255, 0, 0], type='', swap='face-56'),
+ 59: dict(
+ name='face-59', id=59, color=[255, 0, 0], type='', swap='face-55'),
+ 60: dict(
+ name='face-60', id=60, color=[255, 0, 0], type='', swap='face-64'),
+ 61: dict(
+ name='face-61', id=61, color=[255, 0, 0], type='', swap='face-63'),
+ 62: dict(name='face-62', id=62, color=[255, 0, 0], type='', swap=''),
+ 63: dict(
+ name='face-63', id=63, color=[255, 0, 0], type='', swap='face-61'),
+ 64: dict(
+ name='face-64', id=64, color=[255, 0, 0], type='', swap='face-60'),
+ 65: dict(
+ name='face-65', id=65, color=[255, 0, 0], type='', swap='face-67'),
+ 66: dict(name='face-66', id=66, color=[255, 0, 0], type='', swap=''),
+ 67: dict(
+ name='face-67', id=67, color=[255, 0, 0], type='', swap='face-65')
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 68,
+
+ # 'https://github.com/jin-s13/COCO-WholeBody/blob/master/'
+ # 'evaluation/myeval_wholebody.py#L177'
+ sigmas=[
+ 0.042, 0.043, 0.044, 0.043, 0.040, 0.035, 0.031, 0.025, 0.020, 0.023,
+ 0.029, 0.032, 0.037, 0.038, 0.043, 0.041, 0.045, 0.013, 0.012, 0.011,
+ 0.011, 0.012, 0.012, 0.011, 0.011, 0.013, 0.015, 0.009, 0.007, 0.007,
+ 0.007, 0.012, 0.009, 0.008, 0.016, 0.010, 0.017, 0.011, 0.009, 0.011,
+ 0.009, 0.007, 0.013, 0.008, 0.011, 0.012, 0.010, 0.034, 0.008, 0.008,
+ 0.009, 0.008, 0.008, 0.007, 0.010, 0.008, 0.009, 0.009, 0.009, 0.007,
+ 0.007, 0.008, 0.011, 0.008, 0.008, 0.008, 0.01, 0.008
+ ])
diff --git a/configs/_base_/datasets/coco_wholebody_hand.py b/configs/_base_/datasets/coco_wholebody_hand.py
new file mode 100644
index 0000000000000000000000000000000000000000..1910b2ced5a8b31cd6f83911e41cae9f1a580222
--- /dev/null
+++ b/configs/_base_/datasets/coco_wholebody_hand.py
@@ -0,0 +1,147 @@
+dataset_info = dict(
+ dataset_name='coco_wholebody_hand',
+ paper_info=dict(
+ author='Jin, Sheng and Xu, Lumin and Xu, Jin and '
+ 'Wang, Can and Liu, Wentao and '
+ 'Qian, Chen and Ouyang, Wanli and Luo, Ping',
+ title='Whole-Body Human Pose Estimation in the Wild',
+ container='Proceedings of the European '
+ 'Conference on Computer Vision (ECCV)',
+ year='2020',
+ homepage='https://github.com/jin-s13/COCO-WholeBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='wrist', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='thumb1', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb2', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb3', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(name='thumb4', id=4, color=[255, 128, 0], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger1', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger2', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger3', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='forefinger4', id=8, color=[255, 153, 255], type='', swap=''),
+ 9:
+ dict(
+ name='middle_finger1',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger3',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='middle_finger4',
+ id=12,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 13:
+ dict(
+ name='ring_finger1', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger2', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger3', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(
+ name='ring_finger4', id=16, color=[255, 51, 51], type='', swap=''),
+ 17:
+ dict(name='pinky_finger1', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger2', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger3', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='pinky_finger4', id=20, color=[0, 255, 0], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[
+ 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024, 0.035, 0.018,
+ 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02, 0.019, 0.022,
+ 0.031
+ ])
diff --git a/configs/_base_/datasets/coco_wholebody_openpose.py b/configs/_base_/datasets/coco_wholebody_openpose.py
new file mode 100644
index 0000000000000000000000000000000000000000..f05dda18abc4f3b02020d5ad4fc19154e715f97d
--- /dev/null
+++ b/configs/_base_/datasets/coco_wholebody_openpose.py
@@ -0,0 +1,1128 @@
+dataset_info = dict(
+ dataset_name='coco_wholebody_openpose',
+ paper_info=dict(
+ author='Jin, Sheng and Xu, Lumin and Xu, Jin and '
+ 'Wang, Can and Liu, Wentao and '
+ 'Qian, Chen and Ouyang, Wanli and Luo, Ping',
+ title='Whole-Body Human Pose Estimation in the Wild',
+ container='Proceedings of the European '
+ 'Conference on Computer Vision (ECCV)',
+ year='2020',
+ homepage='https://github.com/jin-s13/COCO-WholeBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[255, 0, 0], type='upper', swap=''),
+ 1:
+ dict(name='neck', id=1, color=[255, 85, 0], type='upper', swap=''),
+ 2:
+ dict(
+ name='right_shoulder',
+ id=2,
+ color=[255, 170, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[255, 255, 0],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='right_wrist',
+ id=4,
+ color=[170, 255, 0],
+ type='upper',
+ swap='left_wrist'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[85, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='left_elbow',
+ id=6,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 7:
+ dict(
+ name='left_wrist',
+ id=7,
+ color=[0, 255, 85],
+ type='upper',
+ swap='right_wrist'),
+ 8:
+ dict(
+ name='right_hip',
+ id=8,
+ color=[0, 255, 170],
+ type='lower',
+ swap='left_hip'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[0, 255, 255],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='right_ankle',
+ id=10,
+ color=[0, 170, 255],
+ type='lower',
+ swap='left_ankle'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 85, 255],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='left_knee',
+ id=12,
+ color=[0, 0, 255],
+ type='lower',
+ swap='right_knee'),
+ 13:
+ dict(
+ name='left_ankle',
+ id=13,
+ color=[85, 0, 255],
+ type='lower',
+ swap='right_ankle'),
+ 14:
+ dict(
+ name='right_eye',
+ id=14,
+ color=[170, 0, 255],
+ type='upper',
+ swap='left_eye'),
+ 15:
+ dict(
+ name='left_eye',
+ id=15,
+ color=[255, 0, 255],
+ type='upper',
+ swap='right_eye'),
+ 16:
+ dict(
+ name='right_ear',
+ id=16,
+ color=[255, 0, 170],
+ type='upper',
+ swap='left_ear'),
+ 17:
+ dict(
+ name='left_ear',
+ id=17,
+ color=[255, 0, 85],
+ type='upper',
+ swap='right_ear'),
+ 18:
+ dict(
+ name='left_big_toe',
+ id=17,
+ color=[0, 0, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 19:
+ dict(
+ name='left_small_toe',
+ id=18,
+ color=[0, 0, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 20:
+ dict(
+ name='left_heel',
+ id=19,
+ color=[0, 0, 0],
+ type='lower',
+ swap='right_heel'),
+ 21:
+ dict(
+ name='right_big_toe',
+ id=20,
+ color=[0, 0, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 22:
+ dict(
+ name='right_small_toe',
+ id=21,
+ color=[0, 0, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 23:
+ dict(
+ name='right_heel',
+ id=22,
+ color=[0, 0, 0],
+ type='lower',
+ swap='left_heel'),
+ 24:
+ dict(
+ name='face-0',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='face-16'),
+ 25:
+ dict(
+ name='face-1',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='face-15'),
+ 26:
+ dict(
+ name='face-2',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='face-14'),
+ 27:
+ dict(
+ name='face-3',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='face-13'),
+ 28:
+ dict(
+ name='face-4',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='face-12'),
+ 29:
+ dict(
+ name='face-5',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='face-11'),
+ 30:
+ dict(
+ name='face-6',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='face-10'),
+ 31:
+ dict(
+ name='face-7',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='face-9'),
+ 32:
+ dict(name='face-8', id=31, color=[255, 255, 255], type='', swap=''),
+ 33:
+ dict(
+ name='face-9',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='face-7'),
+ 34:
+ dict(
+ name='face-10',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='face-6'),
+ 35:
+ dict(
+ name='face-11',
+ id=34,
+ color=[255, 255, 255],
+ type='',
+ swap='face-5'),
+ 36:
+ dict(
+ name='face-12',
+ id=35,
+ color=[255, 255, 255],
+ type='',
+ swap='face-4'),
+ 37:
+ dict(
+ name='face-13',
+ id=36,
+ color=[255, 255, 255],
+ type='',
+ swap='face-3'),
+ 38:
+ dict(
+ name='face-14',
+ id=37,
+ color=[255, 255, 255],
+ type='',
+ swap='face-2'),
+ 39:
+ dict(
+ name='face-15',
+ id=38,
+ color=[255, 255, 255],
+ type='',
+ swap='face-1'),
+ 40:
+ dict(
+ name='face-16',
+ id=39,
+ color=[255, 255, 255],
+ type='',
+ swap='face-0'),
+ 41:
+ dict(
+ name='face-17',
+ id=40,
+ color=[255, 255, 255],
+ type='',
+ swap='face-26'),
+ 42:
+ dict(
+ name='face-18',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='face-25'),
+ 43:
+ dict(
+ name='face-19',
+ id=42,
+ color=[255, 255, 255],
+ type='',
+ swap='face-24'),
+ 44:
+ dict(
+ name='face-20',
+ id=43,
+ color=[255, 255, 255],
+ type='',
+ swap='face-23'),
+ 45:
+ dict(
+ name='face-21',
+ id=44,
+ color=[255, 255, 255],
+ type='',
+ swap='face-22'),
+ 46:
+ dict(
+ name='face-22',
+ id=45,
+ color=[255, 255, 255],
+ type='',
+ swap='face-21'),
+ 47:
+ dict(
+ name='face-23',
+ id=46,
+ color=[255, 255, 255],
+ type='',
+ swap='face-20'),
+ 48:
+ dict(
+ name='face-24',
+ id=47,
+ color=[255, 255, 255],
+ type='',
+ swap='face-19'),
+ 49:
+ dict(
+ name='face-25',
+ id=48,
+ color=[255, 255, 255],
+ type='',
+ swap='face-18'),
+ 50:
+ dict(
+ name='face-26',
+ id=49,
+ color=[255, 255, 255],
+ type='',
+ swap='face-17'),
+ 51:
+ dict(name='face-27', id=50, color=[255, 255, 255], type='', swap=''),
+ 52:
+ dict(name='face-28', id=51, color=[255, 255, 255], type='', swap=''),
+ 53:
+ dict(name='face-29', id=52, color=[255, 255, 255], type='', swap=''),
+ 54:
+ dict(name='face-30', id=53, color=[255, 255, 255], type='', swap=''),
+ 55:
+ dict(
+ name='face-31',
+ id=54,
+ color=[255, 255, 255],
+ type='',
+ swap='face-35'),
+ 56:
+ dict(
+ name='face-32',
+ id=55,
+ color=[255, 255, 255],
+ type='',
+ swap='face-34'),
+ 57:
+ dict(name='face-33', id=56, color=[255, 255, 255], type='', swap=''),
+ 58:
+ dict(
+ name='face-34',
+ id=57,
+ color=[255, 255, 255],
+ type='',
+ swap='face-32'),
+ 59:
+ dict(
+ name='face-35',
+ id=58,
+ color=[255, 255, 255],
+ type='',
+ swap='face-31'),
+ 60:
+ dict(
+ name='face-36',
+ id=59,
+ color=[255, 255, 255],
+ type='',
+ swap='face-45'),
+ 61:
+ dict(
+ name='face-37',
+ id=60,
+ color=[255, 255, 255],
+ type='',
+ swap='face-44'),
+ 62:
+ dict(
+ name='face-38',
+ id=61,
+ color=[255, 255, 255],
+ type='',
+ swap='face-43'),
+ 63:
+ dict(
+ name='face-39',
+ id=62,
+ color=[255, 255, 255],
+ type='',
+ swap='face-42'),
+ 64:
+ dict(
+ name='face-40',
+ id=63,
+ color=[255, 255, 255],
+ type='',
+ swap='face-47'),
+ 65:
+ dict(
+ name='face-41',
+ id=64,
+ color=[255, 255, 255],
+ type='',
+ swap='face-46'),
+ 66:
+ dict(
+ name='face-42',
+ id=65,
+ color=[255, 255, 255],
+ type='',
+ swap='face-39'),
+ 67:
+ dict(
+ name='face-43',
+ id=66,
+ color=[255, 255, 255],
+ type='',
+ swap='face-38'),
+ 68:
+ dict(
+ name='face-44',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='face-37'),
+ 69:
+ dict(
+ name='face-45',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='face-36'),
+ 70:
+ dict(
+ name='face-46',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='face-41'),
+ 71:
+ dict(
+ name='face-47',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='face-40'),
+ 72:
+ dict(
+ name='face-48',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='face-54'),
+ 73:
+ dict(
+ name='face-49',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='face-53'),
+ 74:
+ dict(
+ name='face-50',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='face-52'),
+ 75:
+ dict(name='face-51', id=74, color=[255, 255, 255], type='', swap=''),
+ 76:
+ dict(
+ name='face-52',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='face-50'),
+ 77:
+ dict(
+ name='face-53',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='face-49'),
+ 78:
+ dict(
+ name='face-54',
+ id=77,
+ color=[255, 255, 255],
+ type='',
+ swap='face-48'),
+ 79:
+ dict(
+ name='face-55',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='face-59'),
+ 80:
+ dict(
+ name='face-56',
+ id=79,
+ color=[255, 255, 255],
+ type='',
+ swap='face-58'),
+ 81:
+ dict(name='face-57', id=80, color=[255, 255, 255], type='', swap=''),
+ 82:
+ dict(
+ name='face-58',
+ id=81,
+ color=[255, 255, 255],
+ type='',
+ swap='face-56'),
+ 83:
+ dict(
+ name='face-59',
+ id=82,
+ color=[255, 255, 255],
+ type='',
+ swap='face-55'),
+ 84:
+ dict(
+ name='face-60',
+ id=83,
+ color=[255, 255, 255],
+ type='',
+ swap='face-64'),
+ 85:
+ dict(
+ name='face-61',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='face-63'),
+ 86:
+ dict(name='face-62', id=85, color=[255, 255, 255], type='', swap=''),
+ 87:
+ dict(
+ name='face-63',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='face-61'),
+ 88:
+ dict(
+ name='face-64',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='face-60'),
+ 89:
+ dict(
+ name='face-65',
+ id=88,
+ color=[255, 255, 255],
+ type='',
+ swap='face-67'),
+ 90:
+ dict(name='face-66', id=89, color=[255, 255, 255], type='', swap=''),
+ 91:
+ dict(
+ name='face-67',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='face-65'),
+ 92:
+ dict(
+ name='left_hand_root',
+ id=92,
+ color=[0, 0, 255],
+ type='',
+ swap='right_hand_root'),
+ 93:
+ dict(
+ name='left_thumb1',
+ id=93,
+ color=[0, 0, 255],
+ type='',
+ swap='right_thumb1'),
+ 94:
+ dict(
+ name='left_thumb2',
+ id=94,
+ color=[0, 0, 255],
+ type='',
+ swap='right_thumb2'),
+ 95:
+ dict(
+ name='left_thumb3',
+ id=95,
+ color=[0, 0, 255],
+ type='',
+ swap='right_thumb3'),
+ 96:
+ dict(
+ name='left_thumb4',
+ id=96,
+ color=[0, 0, 255],
+ type='',
+ swap='right_thumb4'),
+ 97:
+ dict(
+ name='left_forefinger1',
+ id=97,
+ color=[0, 0, 255],
+ type='',
+ swap='right_forefinger1'),
+ 98:
+ dict(
+ name='left_forefinger2',
+ id=98,
+ color=[0, 0, 255],
+ type='',
+ swap='right_forefinger2'),
+ 99:
+ dict(
+ name='left_forefinger3',
+ id=99,
+ color=[0, 0, 255],
+ type='',
+ swap='right_forefinger3'),
+ 100:
+ dict(
+ name='left_forefinger4',
+ id=100,
+ color=[0, 0, 255],
+ type='',
+ swap='right_forefinger4'),
+ 101:
+ dict(
+ name='left_middle_finger1',
+ id=101,
+ color=[0, 0, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 102:
+ dict(
+ name='left_middle_finger2',
+ id=102,
+ color=[0, 0, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 103:
+ dict(
+ name='left_middle_finger3',
+ id=103,
+ color=[0, 0, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 104:
+ dict(
+ name='left_middle_finger4',
+ id=104,
+ color=[0, 0, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 105:
+ dict(
+ name='left_ring_finger1',
+ id=105,
+ color=[0, 0, 255],
+ type='',
+ swap='right_ring_finger1'),
+ 106:
+ dict(
+ name='left_ring_finger2',
+ id=106,
+ color=[0, 0, 255],
+ type='',
+ swap='right_ring_finger2'),
+ 107:
+ dict(
+ name='left_ring_finger3',
+ id=107,
+ color=[0, 0, 255],
+ type='',
+ swap='right_ring_finger3'),
+ 108:
+ dict(
+ name='left_ring_finger4',
+ id=108,
+ color=[0, 0, 255],
+ type='',
+ swap='right_ring_finger4'),
+ 109:
+ dict(
+ name='left_pinky_finger1',
+ id=109,
+ color=[0, 0, 255],
+ type='',
+ swap='right_pinky_finger1'),
+ 110:
+ dict(
+ name='left_pinky_finger2',
+ id=110,
+ color=[0, 0, 255],
+ type='',
+ swap='right_pinky_finger2'),
+ 111:
+ dict(
+ name='left_pinky_finger3',
+ id=111,
+ color=[0, 0, 255],
+ type='',
+ swap='right_pinky_finger3'),
+ 112:
+ dict(
+ name='left_pinky_finger4',
+ id=112,
+ color=[0, 0, 255],
+ type='',
+ swap='right_pinky_finger4'),
+ 113:
+ dict(
+ name='right_hand_root',
+ id=113,
+ color=[0, 0, 255],
+ type='',
+ swap='left_hand_root'),
+ 114:
+ dict(
+ name='right_thumb1',
+ id=114,
+ color=[0, 0, 255],
+ type='',
+ swap='left_thumb1'),
+ 115:
+ dict(
+ name='right_thumb2',
+ id=115,
+ color=[0, 0, 255],
+ type='',
+ swap='left_thumb2'),
+ 116:
+ dict(
+ name='right_thumb3',
+ id=116,
+ color=[0, 0, 255],
+ type='',
+ swap='left_thumb3'),
+ 117:
+ dict(
+ name='right_thumb4',
+ id=117,
+ color=[0, 0, 255],
+ type='',
+ swap='left_thumb4'),
+ 118:
+ dict(
+ name='right_forefinger1',
+ id=118,
+ color=[0, 0, 255],
+ type='',
+ swap='left_forefinger1'),
+ 119:
+ dict(
+ name='right_forefinger2',
+ id=119,
+ color=[0, 0, 255],
+ type='',
+ swap='left_forefinger2'),
+ 120:
+ dict(
+ name='right_forefinger3',
+ id=120,
+ color=[0, 0, 255],
+ type='',
+ swap='left_forefinger3'),
+ 121:
+ dict(
+ name='right_forefinger4',
+ id=121,
+ color=[0, 0, 255],
+ type='',
+ swap='left_forefinger4'),
+ 122:
+ dict(
+ name='right_middle_finger1',
+ id=122,
+ color=[0, 0, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 123:
+ dict(
+ name='right_middle_finger2',
+ id=123,
+ color=[0, 0, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 124:
+ dict(
+ name='right_middle_finger3',
+ id=124,
+ color=[0, 0, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 125:
+ dict(
+ name='right_middle_finger4',
+ id=125,
+ color=[0, 0, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 126:
+ dict(
+ name='right_ring_finger1',
+ id=126,
+ color=[0, 0, 255],
+ type='',
+ swap='left_ring_finger1'),
+ 127:
+ dict(
+ name='right_ring_finger2',
+ id=127,
+ color=[0, 0, 255],
+ type='',
+ swap='left_ring_finger2'),
+ 128:
+ dict(
+ name='right_ring_finger3',
+ id=128,
+ color=[0, 0, 255],
+ type='',
+ swap='left_ring_finger3'),
+ 129:
+ dict(
+ name='right_ring_finger4',
+ id=129,
+ color=[0, 0, 255],
+ type='',
+ swap='left_ring_finger4'),
+ 130:
+ dict(
+ name='right_pinky_finger1',
+ id=130,
+ color=[0, 0, 255],
+ type='',
+ swap='left_pinky_finger1'),
+ 131:
+ dict(
+ name='right_pinky_finger2',
+ id=131,
+ color=[0, 0, 255],
+ type='',
+ swap='left_pinky_finger2'),
+ 132:
+ dict(
+ name='right_pinky_finger3',
+ id=132,
+ color=[0, 0, 255],
+ type='',
+ swap='left_pinky_finger3'),
+ 133:
+ dict(
+ name='right_pinky_finger4',
+ id=133,
+ color=[0, 0, 255],
+ type='',
+ swap='left_pinky_finger4')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('neck', 'right_shoulder'), id=0, color=[255, 0, 0]),
+ 1:
+ dict(link=('neck', 'left_shoulder'), id=1, color=[255, 85, 0]),
+ 2:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=2, color=[255, 170, 0]),
+ 3:
+ dict(link=('right_elbow', 'right_wrist'), id=3, color=[255, 255, 0]),
+ 4:
+ dict(link=('left_shoulder', 'left_elbow'), id=4, color=[170, 255, 0]),
+ 5:
+ dict(link=('left_elbow', 'left_wrist'), id=5, color=[85, 255, 0]),
+ 6:
+ dict(link=('neck', 'right_hip'), id=6, color=[0, 255, 0]),
+ 7:
+ dict(link=('right_hip', 'right_knee'), id=7, color=[0, 255, 85]),
+ 8:
+ dict(link=('right_knee', 'right_ankle'), id=8, color=[0, 255, 170]),
+ 9:
+ dict(link=('neck', 'left_hip'), id=9, color=[0, 255, 225]),
+ 10:
+ dict(link=('left_hip', 'left_knee'), id=10, color=[0, 170, 255]),
+ 11:
+ dict(link=('left_knee', 'left_ankle'), id=11, color=[0, 85, 255]),
+ 12:
+ dict(link=('neck', 'nose'), id=12, color=[0, 0, 255]),
+ 13:
+ dict(link=('nose', 'right_eye'), id=13, color=[255, 0, 170]),
+ 14:
+ dict(link=('right_eye', 'right_ear'), id=14, color=[170, 0, 255]),
+ 15:
+ dict(link=('nose', 'left_eye'), id=15, color=[255, 0, 255]),
+ 16:
+ dict(link=('left_eye', 'left_ear'), id=16, color=[255, 0, 170]),
+ 17:
+ dict(link=('left_hand_root', 'left_thumb1'), id=17, color=[255, 0, 0]),
+ 18:
+ dict(link=('left_thumb1', 'left_thumb2'), id=18, color=[255, 76, 0]),
+ 19:
+ dict(link=('left_thumb2', 'left_thumb3'), id=19, color=[255, 153, 0]),
+ 20:
+ dict(link=('left_thumb3', 'left_thumb4'), id=20, color=[255, 230, 0]),
+ 21:
+ dict(
+ link=('left_hand_root', 'left_forefinger1'),
+ id=21,
+ color=[204, 255, 0]),
+ 22:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=22,
+ color=[128, 255, 0]),
+ 23:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=23,
+ color=[51, 255, 0]),
+ 24:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=24,
+ color=[0, 255, 26]),
+ 25:
+ dict(
+ link=('left_hand_root', 'left_middle_finger1'),
+ id=25,
+ color=[0, 255, 102]),
+ 26:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=26,
+ color=[0, 255, 178]),
+ 27:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=27,
+ color=[0, 255, 255]),
+ 28:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=28,
+ color=[0, 178, 255]),
+ 29:
+ dict(
+ link=('left_hand_root', 'left_ring_finger1'),
+ id=29,
+ color=[0, 102, 255]),
+ 30:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=30,
+ color=[0, 26, 255]),
+ 31:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=31,
+ color=[51, 0, 255]),
+ 32:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=32,
+ color=[128, 0, 255]),
+ 33:
+ dict(
+ link=('left_hand_root', 'left_pinky_finger1'),
+ id=33,
+ color=[204, 0, 255]),
+ 34:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=34,
+ color=[255, 0, 230]),
+ 35:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=35,
+ color=[255, 0, 153]),
+ 36:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=36,
+ color=[255, 0, 76]),
+ 37:
+ dict(
+ link=('right_hand_root', 'right_thumb1'), id=37, color=[255, 0,
+ 0]),
+ 38:
+ dict(link=('right_thumb1', 'right_thumb2'), id=38, color=[255, 76, 0]),
+ 39:
+ dict(
+ link=('right_thumb2', 'right_thumb3'), id=39, color=[255, 153, 0]),
+ 40:
+ dict(
+ link=('right_thumb3', 'right_thumb4'), id=40, color=[255, 230, 0]),
+ 41:
+ dict(
+ link=('right_hand_root', 'right_forefinger1'),
+ id=41,
+ color=[204, 255, 0]),
+ 42:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=42,
+ color=[128, 255, 0]),
+ 43:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=43,
+ color=[51, 255, 0]),
+ 44:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=44,
+ color=[0, 255, 26]),
+ 45:
+ dict(
+ link=('right_hand_root', 'right_middle_finger1'),
+ id=45,
+ color=[0, 255, 102]),
+ 46:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=46,
+ color=[0, 255, 178]),
+ 47:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=47,
+ color=[255, 255, 255]),
+ 48:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=48,
+ color=[0, 178, 255]),
+ 49:
+ dict(
+ link=('right_hand_root', 'right_ring_finger1'),
+ id=49,
+ color=[0, 102, 255]),
+ 50:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=50,
+ color=[0, 26, 255]),
+ 51:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=51,
+ color=[51, 0, 255]),
+ 52:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=52,
+ color=[128, 0, 255]),
+ 53:
+ dict(
+ link=('right_hand_root', 'right_pinky_finger1'),
+ id=53,
+ color=[204, 0, 255]),
+ 54:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=54,
+ color=[255, 0, 230]),
+ 55:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=55,
+ color=[255, 0, 153]),
+ 56:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=56,
+ color=[255, 0, 76])
+ },
+ joint_weights=[1.] * 134,
+ # 'https://github.com/jin-s13/COCO-WholeBody/blob/master/'
+ # 'evaluation/myeval_wholebody.py#L175'
+ sigmas=[
+ 0.026, 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072,
+ 0.062, 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.068, 0.066,
+ 0.066, 0.092, 0.094, 0.094, 0.042, 0.043, 0.044, 0.043, 0.040, 0.035,
+ 0.031, 0.025, 0.020, 0.023, 0.029, 0.032, 0.037, 0.038, 0.043, 0.041,
+ 0.045, 0.013, 0.012, 0.011, 0.011, 0.012, 0.012, 0.011, 0.011, 0.013,
+ 0.015, 0.009, 0.007, 0.007, 0.007, 0.012, 0.009, 0.008, 0.016, 0.010,
+ 0.017, 0.011, 0.009, 0.011, 0.009, 0.007, 0.013, 0.008, 0.011, 0.012,
+ 0.010, 0.034, 0.008, 0.008, 0.009, 0.008, 0.008, 0.007, 0.010, 0.008,
+ 0.009, 0.009, 0.009, 0.007, 0.007, 0.008, 0.011, 0.008, 0.008, 0.008,
+ 0.01, 0.008, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024,
+ 0.035, 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02,
+ 0.019, 0.022, 0.031, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025,
+ 0.024, 0.035, 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032,
+ 0.02, 0.019, 0.022, 0.031
+ ])
diff --git a/configs/_base_/datasets/cofw.py b/configs/_base_/datasets/cofw.py
new file mode 100644
index 0000000000000000000000000000000000000000..d528bf2f2f7e63adbff3ed56e18bca8b02165e42
--- /dev/null
+++ b/configs/_base_/datasets/cofw.py
@@ -0,0 +1,57 @@
+dataset_info = dict(
+ dataset_name='cofw',
+ paper_info=dict(
+ author='Burgos-Artizzu, Xavier P and Perona, '
+ r'Pietro and Doll{\'a}r, Piotr',
+ title='Robust face landmark estimation under occlusion',
+ container='Proceedings of the IEEE international '
+ 'conference on computer vision',
+ year='2013',
+ homepage='http://www.vision.caltech.edu/xpburgos/ICCV13/',
+ ),
+ keypoint_info={
+ 0: dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap='kpt-1'),
+ 1: dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap='kpt-0'),
+ 2: dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap='kpt-3'),
+ 3: dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap='kpt-2'),
+ 4: dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap='kpt-6'),
+ 5: dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap='kpt-7'),
+ 6: dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap='kpt-4'),
+ 7: dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap='kpt-5'),
+ 8: dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap='kpt-9'),
+ 9: dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap='kpt-8'),
+ 10:
+ dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap='kpt-11'),
+ 11:
+ dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap='kpt-10'),
+ 12:
+ dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap='kpt-14'),
+ 13:
+ dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap='kpt-15'),
+ 14:
+ dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap='kpt-12'),
+ 15:
+ dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap='kpt-13'),
+ 16:
+ dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap='kpt-17'),
+ 17:
+ dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap='kpt-16'),
+ 18:
+ dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap='kpt-19'),
+ 19:
+ dict(name='kpt-19', id=19, color=[255, 0, 0], type='', swap='kpt-18'),
+ 20: dict(name='kpt-20', id=20, color=[255, 0, 0], type='', swap=''),
+ 21: dict(name='kpt-21', id=21, color=[255, 0, 0], type='', swap=''),
+ 22:
+ dict(name='kpt-22', id=22, color=[255, 0, 0], type='', swap='kpt-23'),
+ 23:
+ dict(name='kpt-23', id=23, color=[255, 0, 0], type='', swap='kpt-22'),
+ 24: dict(name='kpt-24', id=24, color=[255, 0, 0], type='', swap=''),
+ 25: dict(name='kpt-25', id=25, color=[255, 0, 0], type='', swap=''),
+ 26: dict(name='kpt-26', id=26, color=[255, 0, 0], type='', swap=''),
+ 27: dict(name='kpt-27', id=27, color=[255, 0, 0], type='', swap=''),
+ 28: dict(name='kpt-28', id=28, color=[255, 0, 0], type='', swap='')
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 29,
+ sigmas=[])
diff --git a/configs/_base_/datasets/crowdpose.py b/configs/_base_/datasets/crowdpose.py
new file mode 100644
index 0000000000000000000000000000000000000000..45086531a601870716eed15a32c5413c0e24b7ae
--- /dev/null
+++ b/configs/_base_/datasets/crowdpose.py
@@ -0,0 +1,147 @@
+dataset_info = dict(
+ dataset_name='crowdpose',
+ paper_info=dict(
+ author='Li, Jiefeng and Wang, Can and Zhu, Hao and '
+ 'Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu',
+ title='CrowdPose: Efficient Crowded Scenes Pose Estimation '
+ 'and A New Benchmark',
+ container='Proceedings of IEEE Conference on Computer '
+ 'Vision and Pattern Recognition (CVPR)',
+ year='2019',
+ homepage='https://github.com/Jeff-sjtu/CrowdPose',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left_shoulder',
+ id=0,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_shoulder'),
+ 1:
+ dict(
+ name='right_shoulder',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_shoulder'),
+ 2:
+ dict(
+ name='left_elbow',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_elbow'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='left_wrist',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_wrist'),
+ 5:
+ dict(
+ name='right_wrist',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='left_wrist'),
+ 6:
+ dict(
+ name='left_hip',
+ id=6,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_hip'),
+ 7:
+ dict(
+ name='right_hip',
+ id=7,
+ color=[0, 255, 0],
+ type='lower',
+ swap='left_hip'),
+ 8:
+ dict(
+ name='left_knee',
+ id=8,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_knee'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[0, 255, 0],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='left_ankle',
+ id=10,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_ankle'),
+ 11:
+ dict(
+ name='right_ankle',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='left_ankle'),
+ 12:
+ dict(
+ name='top_head', id=12, color=[255, 128, 0], type='upper',
+ swap=''),
+ 13:
+ dict(name='neck', id=13, color=[0, 255, 0], type='upper', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('top_head', 'neck'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('right_shoulder', 'neck'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('left_shoulder', 'neck'), id=14, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 0.2, 0.2, 0.2, 1.3, 1.5, 0.2, 1.3, 1.5, 0.2, 0.2, 0.5, 0.2, 0.2, 0.5
+ ],
+ sigmas=[
+ 0.079, 0.079, 0.072, 0.072, 0.062, 0.062, 0.107, 0.107, 0.087, 0.087,
+ 0.089, 0.089, 0.079, 0.079
+ ])
diff --git a/configs/_base_/datasets/deepfashion2.py b/configs/_base_/datasets/deepfashion2.py
new file mode 100644
index 0000000000000000000000000000000000000000..f65d1bb591fab8f06a79b5d595478a282acd8b3e
--- /dev/null
+++ b/configs/_base_/datasets/deepfashion2.py
@@ -0,0 +1,2660 @@
+colors = dict(
+ sss=[255, 128, 0], # short_sleeve_shirt
+ lss=[255, 0, 128], # long_sleeved_shirt
+ sso=[128, 0, 255], # short_sleeved_outwear
+ lso=[0, 128, 255], # long_sleeved_outwear
+ vest=[0, 128, 128], # vest
+ sling=[0, 0, 128], # sling
+ shorts=[128, 128, 128], # shorts
+ trousers=[128, 0, 128], # trousers
+ skirt=[64, 128, 128], # skirt
+ ssd=[64, 64, 128], # short_sleeved_dress
+ lsd=[128, 64, 0], # long_sleeved_dress
+ vd=[128, 64, 255], # vest_dress
+ sd=[128, 64, 0], # sling_dress
+)
+dataset_info = dict(
+ dataset_name='deepfashion2',
+ paper_info=dict(
+ author='Yuying Ge and Ruimao Zhang and Lingyun Wu '
+ 'and Xiaogang Wang and Xiaoou Tang and Ping Luo',
+ title='DeepFashion2: A Versatile Benchmark for '
+ 'Detection, Pose Estimation, Segmentation and '
+ 'Re-Identification of Clothing Images',
+ container='Proceedings of IEEE Conference on Computer '
+ 'Vision and Pattern Recognition (CVPR)',
+ year='2019',
+ homepage='https://github.com/switchablenorms/DeepFashion2',
+ ),
+ keypoint_info={
+ # short_sleeved_shirt
+ 0:
+ dict(name='sss_kpt1', id=0, color=colors['sss'], type='', swap=''),
+ 1:
+ dict(
+ name='sss_kpt2',
+ id=1,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt6'),
+ 2:
+ dict(
+ name='sss_kpt3',
+ id=2,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt5'),
+ 3:
+ dict(name='sss_kpt4', id=3, color=colors['sss'], type='', swap=''),
+ 4:
+ dict(
+ name='sss_kpt5',
+ id=4,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt3'),
+ 5:
+ dict(
+ name='sss_kpt6',
+ id=5,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt2'),
+ 6:
+ dict(
+ name='sss_kpt7',
+ id=6,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt25'),
+ 7:
+ dict(
+ name='sss_kpt8',
+ id=7,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt24'),
+ 8:
+ dict(
+ name='sss_kpt9',
+ id=8,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt23'),
+ 9:
+ dict(
+ name='sss_kpt10',
+ id=9,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt22'),
+ 10:
+ dict(
+ name='sss_kpt11',
+ id=10,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt21'),
+ 11:
+ dict(
+ name='sss_kpt12',
+ id=11,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt20'),
+ 12:
+ dict(
+ name='sss_kpt13',
+ id=12,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt19'),
+ 13:
+ dict(
+ name='sss_kpt14',
+ id=13,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt18'),
+ 14:
+ dict(
+ name='sss_kpt15',
+ id=14,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt17'),
+ 15:
+ dict(name='sss_kpt16', id=15, color=colors['sss'], type='', swap=''),
+ 16:
+ dict(
+ name='sss_kpt17',
+ id=16,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt15'),
+ 17:
+ dict(
+ name='sss_kpt18',
+ id=17,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt14'),
+ 18:
+ dict(
+ name='sss_kpt19',
+ id=18,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt13'),
+ 19:
+ dict(
+ name='sss_kpt20',
+ id=19,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt12'),
+ 20:
+ dict(
+ name='sss_kpt21',
+ id=20,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt11'),
+ 21:
+ dict(
+ name='sss_kpt22',
+ id=21,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt10'),
+ 22:
+ dict(
+ name='sss_kpt23',
+ id=22,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt9'),
+ 23:
+ dict(
+ name='sss_kpt24',
+ id=23,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt8'),
+ 24:
+ dict(
+ name='sss_kpt25',
+ id=24,
+ color=colors['sss'],
+ type='',
+ swap='sss_kpt7'),
+ # long_sleeved_shirt
+ 25:
+ dict(name='lss_kpt1', id=25, color=colors['lss'], type='', swap=''),
+ 26:
+ dict(
+ name='lss_kpt2',
+ id=26,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt6'),
+ 27:
+ dict(
+ name='lss_kpt3',
+ id=27,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt5'),
+ 28:
+ dict(name='lss_kpt4', id=28, color=colors['lss'], type='', swap=''),
+ 29:
+ dict(
+ name='lss_kpt5',
+ id=29,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt3'),
+ 30:
+ dict(
+ name='lss_kpt6',
+ id=30,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt2'),
+ 31:
+ dict(
+ name='lss_kpt7',
+ id=31,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt33'),
+ 32:
+ dict(
+ name='lss_kpt8',
+ id=32,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt32'),
+ 33:
+ dict(
+ name='lss_kpt9',
+ id=33,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt31'),
+ 34:
+ dict(
+ name='lss_kpt10',
+ id=34,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt30'),
+ 35:
+ dict(
+ name='lss_kpt11',
+ id=35,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt29'),
+ 36:
+ dict(
+ name='lss_kpt12',
+ id=36,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt28'),
+ 37:
+ dict(
+ name='lss_kpt13',
+ id=37,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt27'),
+ 38:
+ dict(
+ name='lss_kpt14',
+ id=38,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt26'),
+ 39:
+ dict(
+ name='lss_kpt15',
+ id=39,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt25'),
+ 40:
+ dict(
+ name='lss_kpt16',
+ id=40,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt24'),
+ 41:
+ dict(
+ name='lss_kpt17',
+ id=41,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt23'),
+ 42:
+ dict(
+ name='lss_kpt18',
+ id=42,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt22'),
+ 43:
+ dict(
+ name='lss_kpt19',
+ id=43,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt21'),
+ 44:
+ dict(name='lss_kpt20', id=44, color=colors['lss'], type='', swap=''),
+ 45:
+ dict(
+ name='lss_kpt21',
+ id=45,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt19'),
+ 46:
+ dict(
+ name='lss_kpt22',
+ id=46,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt18'),
+ 47:
+ dict(
+ name='lss_kpt23',
+ id=47,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt17'),
+ 48:
+ dict(
+ name='lss_kpt24',
+ id=48,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt16'),
+ 49:
+ dict(
+ name='lss_kpt25',
+ id=49,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt15'),
+ 50:
+ dict(
+ name='lss_kpt26',
+ id=50,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt14'),
+ 51:
+ dict(
+ name='lss_kpt27',
+ id=51,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt13'),
+ 52:
+ dict(
+ name='lss_kpt28',
+ id=52,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt12'),
+ 53:
+ dict(
+ name='lss_kpt29',
+ id=53,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt11'),
+ 54:
+ dict(
+ name='lss_kpt30',
+ id=54,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt10'),
+ 55:
+ dict(
+ name='lss_kpt31',
+ id=55,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt9'),
+ 56:
+ dict(
+ name='lss_kpt32',
+ id=56,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt8'),
+ 57:
+ dict(
+ name='lss_kpt33',
+ id=57,
+ color=colors['lss'],
+ type='',
+ swap='lss_kpt7'),
+ # short_sleeved_outwear
+ 58:
+ dict(name='sso_kpt1', id=58, color=colors['sso'], type='', swap=''),
+ 59:
+ dict(
+ name='sso_kpt2',
+ id=59,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt26'),
+ 60:
+ dict(
+ name='sso_kpt3',
+ id=60,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt5'),
+ 61:
+ dict(
+ name='sso_kpt4',
+ id=61,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt6'),
+ 62:
+ dict(
+ name='sso_kpt5',
+ id=62,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt3'),
+ 63:
+ dict(
+ name='sso_kpt6',
+ id=63,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt4'),
+ 64:
+ dict(
+ name='sso_kpt7',
+ id=64,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt25'),
+ 65:
+ dict(
+ name='sso_kpt8',
+ id=65,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt24'),
+ 66:
+ dict(
+ name='sso_kpt9',
+ id=66,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt23'),
+ 67:
+ dict(
+ name='sso_kpt10',
+ id=67,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt22'),
+ 68:
+ dict(
+ name='sso_kpt11',
+ id=68,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt21'),
+ 69:
+ dict(
+ name='sso_kpt12',
+ id=69,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt20'),
+ 70:
+ dict(
+ name='sso_kpt13',
+ id=70,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt19'),
+ 71:
+ dict(
+ name='sso_kpt14',
+ id=71,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt18'),
+ 72:
+ dict(
+ name='sso_kpt15',
+ id=72,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt17'),
+ 73:
+ dict(
+ name='sso_kpt16',
+ id=73,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt29'),
+ 74:
+ dict(
+ name='sso_kpt17',
+ id=74,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt15'),
+ 75:
+ dict(
+ name='sso_kpt18',
+ id=75,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt14'),
+ 76:
+ dict(
+ name='sso_kpt19',
+ id=76,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt13'),
+ 77:
+ dict(
+ name='sso_kpt20',
+ id=77,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt12'),
+ 78:
+ dict(
+ name='sso_kpt21',
+ id=78,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt11'),
+ 79:
+ dict(
+ name='sso_kpt22',
+ id=79,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt10'),
+ 80:
+ dict(
+ name='sso_kpt23',
+ id=80,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt9'),
+ 81:
+ dict(
+ name='sso_kpt24',
+ id=81,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt8'),
+ 82:
+ dict(
+ name='sso_kpt25',
+ id=82,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt7'),
+ 83:
+ dict(
+ name='sso_kpt26',
+ id=83,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt2'),
+ 84:
+ dict(
+ name='sso_kpt27',
+ id=84,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt30'),
+ 85:
+ dict(
+ name='sso_kpt28',
+ id=85,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt31'),
+ 86:
+ dict(
+ name='sso_kpt29',
+ id=86,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt16'),
+ 87:
+ dict(
+ name='sso_kpt30',
+ id=87,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt27'),
+ 88:
+ dict(
+ name='sso_kpt31',
+ id=88,
+ color=colors['sso'],
+ type='',
+ swap='sso_kpt28'),
+ # long_sleeved_outwear
+ 89:
+ dict(name='lso_kpt1', id=89, color=colors['lso'], type='', swap=''),
+ 90:
+ dict(
+ name='lso_kpt2',
+ id=90,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt6'),
+ 91:
+ dict(
+ name='lso_kpt3',
+ id=91,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt5'),
+ 92:
+ dict(
+ name='lso_kpt4',
+ id=92,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt34'),
+ 93:
+ dict(
+ name='lso_kpt5',
+ id=93,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt3'),
+ 94:
+ dict(
+ name='lso_kpt6',
+ id=94,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt2'),
+ 95:
+ dict(
+ name='lso_kpt7',
+ id=95,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt33'),
+ 96:
+ dict(
+ name='lso_kpt8',
+ id=96,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt32'),
+ 97:
+ dict(
+ name='lso_kpt9',
+ id=97,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt31'),
+ 98:
+ dict(
+ name='lso_kpt10',
+ id=98,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt30'),
+ 99:
+ dict(
+ name='lso_kpt11',
+ id=99,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt29'),
+ 100:
+ dict(
+ name='lso_kpt12',
+ id=100,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt28'),
+ 101:
+ dict(
+ name='lso_kpt13',
+ id=101,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt27'),
+ 102:
+ dict(
+ name='lso_kpt14',
+ id=102,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt26'),
+ 103:
+ dict(
+ name='lso_kpt15',
+ id=103,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt25'),
+ 104:
+ dict(
+ name='lso_kpt16',
+ id=104,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt24'),
+ 105:
+ dict(
+ name='lso_kpt17',
+ id=105,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt23'),
+ 106:
+ dict(
+ name='lso_kpt18',
+ id=106,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt22'),
+ 107:
+ dict(
+ name='lso_kpt19',
+ id=107,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt21'),
+ 108:
+ dict(
+ name='lso_kpt20',
+ id=108,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt37'),
+ 109:
+ dict(
+ name='lso_kpt21',
+ id=109,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt19'),
+ 110:
+ dict(
+ name='lso_kpt22',
+ id=110,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt18'),
+ 111:
+ dict(
+ name='lso_kpt23',
+ id=111,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt17'),
+ 112:
+ dict(
+ name='lso_kpt24',
+ id=112,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt16'),
+ 113:
+ dict(
+ name='lso_kpt25',
+ id=113,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt15'),
+ 114:
+ dict(
+ name='lso_kpt26',
+ id=114,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt14'),
+ 115:
+ dict(
+ name='lso_kpt27',
+ id=115,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt13'),
+ 116:
+ dict(
+ name='lso_kpt28',
+ id=116,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt12'),
+ 117:
+ dict(
+ name='lso_kpt29',
+ id=117,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt11'),
+ 118:
+ dict(
+ name='lso_kpt30',
+ id=118,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt10'),
+ 119:
+ dict(
+ name='lso_kpt31',
+ id=119,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt9'),
+ 120:
+ dict(
+ name='lso_kpt32',
+ id=120,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt8'),
+ 121:
+ dict(
+ name='lso_kpt33',
+ id=121,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt7'),
+ 122:
+ dict(
+ name='lso_kpt34',
+ id=122,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt4'),
+ 123:
+ dict(
+ name='lso_kpt35',
+ id=123,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt38'),
+ 124:
+ dict(
+ name='lso_kpt36',
+ id=124,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt39'),
+ 125:
+ dict(
+ name='lso_kpt37',
+ id=125,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt20'),
+ 126:
+ dict(
+ name='lso_kpt38',
+ id=126,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt35'),
+ 127:
+ dict(
+ name='lso_kpt39',
+ id=127,
+ color=colors['lso'],
+ type='',
+ swap='lso_kpt36'),
+ # vest
+ 128:
+ dict(name='vest_kpt1', id=128, color=colors['vest'], type='', swap=''),
+ 129:
+ dict(
+ name='vest_kpt2',
+ id=129,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt6'),
+ 130:
+ dict(
+ name='vest_kpt3',
+ id=130,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt5'),
+ 131:
+ dict(name='vest_kpt4', id=131, color=colors['vest'], type='', swap=''),
+ 132:
+ dict(
+ name='vest_kpt5',
+ id=132,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt3'),
+ 133:
+ dict(
+ name='vest_kpt6',
+ id=133,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt2'),
+ 134:
+ dict(
+ name='vest_kpt7',
+ id=134,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt15'),
+ 135:
+ dict(
+ name='vest_kpt8',
+ id=135,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt14'),
+ 136:
+ dict(
+ name='vest_kpt9',
+ id=136,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt13'),
+ 137:
+ dict(
+ name='vest_kpt10',
+ id=137,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt12'),
+ 138:
+ dict(
+ name='vest_kpt11', id=138, color=colors['vest'], type='', swap=''),
+ 139:
+ dict(
+ name='vest_kpt12',
+ id=139,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt10'),
+ 140:
+ dict(
+ name='vest_kpt13', id=140, color=colors['vest'], type='', swap=''),
+ 141:
+ dict(
+ name='vest_kpt14',
+ id=141,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt8'),
+ 142:
+ dict(
+ name='vest_kpt15',
+ id=142,
+ color=colors['vest'],
+ type='',
+ swap='vest_kpt7'),
+ # sling
+ 143:
+ dict(
+ name='sling_kpt1', id=143, color=colors['sling'], type='',
+ swap=''),
+ 144:
+ dict(
+ name='sling_kpt2',
+ id=144,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt6'),
+ 145:
+ dict(
+ name='sling_kpt3',
+ id=145,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt5'),
+ 146:
+ dict(
+ name='sling_kpt4', id=146, color=colors['sling'], type='',
+ swap=''),
+ 147:
+ dict(
+ name='sling_kpt5',
+ id=147,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt3'),
+ 148:
+ dict(
+ name='sling_kpt6',
+ id=148,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt2'),
+ 149:
+ dict(
+ name='sling_kpt7',
+ id=149,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt15'),
+ 150:
+ dict(
+ name='sling_kpt8',
+ id=150,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt14'),
+ 151:
+ dict(
+ name='sling_kpt9',
+ id=151,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt13'),
+ 152:
+ dict(
+ name='sling_kpt10',
+ id=152,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt12'),
+ 153:
+ dict(
+ name='sling_kpt11',
+ id=153,
+ color=colors['sling'],
+ type='',
+ swap=''),
+ 154:
+ dict(
+ name='sling_kpt12',
+ id=154,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt10'),
+ 155:
+ dict(
+ name='sling_kpt13',
+ id=155,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt9'),
+ 156:
+ dict(
+ name='sling_kpt14',
+ id=156,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt8'),
+ 157:
+ dict(
+ name='sling_kpt15',
+ id=157,
+ color=colors['sling'],
+ type='',
+ swap='sling_kpt7'),
+ # shorts
+ 158:
+ dict(
+ name='shorts_kpt1',
+ id=158,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt3'),
+ 159:
+ dict(
+ name='shorts_kpt2',
+ id=159,
+ color=colors['shorts'],
+ type='',
+ swap=''),
+ 160:
+ dict(
+ name='shorts_kpt3',
+ id=160,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt1'),
+ 161:
+ dict(
+ name='shorts_kpt4',
+ id=161,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt10'),
+ 162:
+ dict(
+ name='shorts_kpt5',
+ id=162,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt9'),
+ 163:
+ dict(
+ name='shorts_kpt6',
+ id=163,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt8'),
+ 164:
+ dict(
+ name='shorts_kpt7',
+ id=164,
+ color=colors['shorts'],
+ type='',
+ swap=''),
+ 165:
+ dict(
+ name='shorts_kpt8',
+ id=165,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt6'),
+ 166:
+ dict(
+ name='shorts_kpt9',
+ id=166,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt5'),
+ 167:
+ dict(
+ name='shorts_kpt10',
+ id=167,
+ color=colors['shorts'],
+ type='',
+ swap='shorts_kpt4'),
+ # trousers
+ 168:
+ dict(
+ name='trousers_kpt1',
+ id=168,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt3'),
+ 169:
+ dict(
+ name='trousers_kpt2',
+ id=169,
+ color=colors['trousers'],
+ type='',
+ swap=''),
+ 170:
+ dict(
+ name='trousers_kpt3',
+ id=170,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt1'),
+ 171:
+ dict(
+ name='trousers_kpt4',
+ id=171,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt14'),
+ 172:
+ dict(
+ name='trousers_kpt5',
+ id=172,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt13'),
+ 173:
+ dict(
+ name='trousers_kpt6',
+ id=173,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt12'),
+ 174:
+ dict(
+ name='trousers_kpt7',
+ id=174,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt11'),
+ 175:
+ dict(
+ name='trousers_kpt8',
+ id=175,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt10'),
+ 176:
+ dict(
+ name='trousers_kpt9',
+ id=176,
+ color=colors['trousers'],
+ type='',
+ swap=''),
+ 177:
+ dict(
+ name='trousers_kpt10',
+ id=177,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt8'),
+ 178:
+ dict(
+ name='trousers_kpt11',
+ id=178,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt7'),
+ 179:
+ dict(
+ name='trousers_kpt12',
+ id=179,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt6'),
+ 180:
+ dict(
+ name='trousers_kpt13',
+ id=180,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt5'),
+ 181:
+ dict(
+ name='trousers_kpt14',
+ id=181,
+ color=colors['trousers'],
+ type='',
+ swap='trousers_kpt4'),
+ # skirt
+ 182:
+ dict(
+ name='skirt_kpt1',
+ id=182,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt3'),
+ 183:
+ dict(
+ name='skirt_kpt2', id=183, color=colors['skirt'], type='',
+ swap=''),
+ 184:
+ dict(
+ name='skirt_kpt3',
+ id=184,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt1'),
+ 185:
+ dict(
+ name='skirt_kpt4',
+ id=185,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt8'),
+ 186:
+ dict(
+ name='skirt_kpt5',
+ id=186,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt7'),
+ 187:
+ dict(
+ name='skirt_kpt6', id=187, color=colors['skirt'], type='',
+ swap=''),
+ 188:
+ dict(
+ name='skirt_kpt7',
+ id=188,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt5'),
+ 189:
+ dict(
+ name='skirt_kpt8',
+ id=189,
+ color=colors['skirt'],
+ type='',
+ swap='skirt_kpt4'),
+ # short_sleeved_dress
+ 190:
+ dict(name='ssd_kpt1', id=190, color=colors['ssd'], type='', swap=''),
+ 191:
+ dict(
+ name='ssd_kpt2',
+ id=191,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt6'),
+ 192:
+ dict(
+ name='ssd_kpt3',
+ id=192,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt5'),
+ 193:
+ dict(name='ssd_kpt4', id=193, color=colors['ssd'], type='', swap=''),
+ 194:
+ dict(
+ name='ssd_kpt5',
+ id=194,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt3'),
+ 195:
+ dict(
+ name='ssd_kpt6',
+ id=195,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt2'),
+ 196:
+ dict(
+ name='ssd_kpt7',
+ id=196,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt29'),
+ 197:
+ dict(
+ name='ssd_kpt8',
+ id=197,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt28'),
+ 198:
+ dict(
+ name='ssd_kpt9',
+ id=198,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt27'),
+ 199:
+ dict(
+ name='ssd_kpt10',
+ id=199,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt26'),
+ 200:
+ dict(
+ name='ssd_kpt11',
+ id=200,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt25'),
+ 201:
+ dict(
+ name='ssd_kpt12',
+ id=201,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt24'),
+ 202:
+ dict(
+ name='ssd_kpt13',
+ id=202,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt23'),
+ 203:
+ dict(
+ name='ssd_kpt14',
+ id=203,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt22'),
+ 204:
+ dict(
+ name='ssd_kpt15',
+ id=204,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt21'),
+ 205:
+ dict(
+ name='ssd_kpt16',
+ id=205,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt20'),
+ 206:
+ dict(
+ name='ssd_kpt17',
+ id=206,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt19'),
+ 207:
+ dict(name='ssd_kpt18', id=207, color=colors['ssd'], type='', swap=''),
+ 208:
+ dict(
+ name='ssd_kpt19',
+ id=208,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt17'),
+ 209:
+ dict(
+ name='ssd_kpt20',
+ id=209,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt16'),
+ 210:
+ dict(
+ name='ssd_kpt21',
+ id=210,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt15'),
+ 211:
+ dict(
+ name='ssd_kpt22',
+ id=211,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt14'),
+ 212:
+ dict(
+ name='ssd_kpt23',
+ id=212,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt13'),
+ 213:
+ dict(
+ name='ssd_kpt24',
+ id=213,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt12'),
+ 214:
+ dict(
+ name='ssd_kpt25',
+ id=214,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt11'),
+ 215:
+ dict(
+ name='ssd_kpt26',
+ id=215,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt10'),
+ 216:
+ dict(
+ name='ssd_kpt27',
+ id=216,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt9'),
+ 217:
+ dict(
+ name='ssd_kpt28',
+ id=217,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt8'),
+ 218:
+ dict(
+ name='ssd_kpt29',
+ id=218,
+ color=colors['ssd'],
+ type='',
+ swap='ssd_kpt7'),
+ # long_sleeved_dress
+ 219:
+ dict(name='lsd_kpt1', id=219, color=colors['lsd'], type='', swap=''),
+ 220:
+ dict(
+ name='lsd_kpt2',
+ id=220,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt6'),
+ 221:
+ dict(
+ name='lsd_kpt3',
+ id=221,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt5'),
+ 222:
+ dict(name='lsd_kpt4', id=222, color=colors['lsd'], type='', swap=''),
+ 223:
+ dict(
+ name='lsd_kpt5',
+ id=223,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt3'),
+ 224:
+ dict(
+ name='lsd_kpt6',
+ id=224,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt2'),
+ 225:
+ dict(
+ name='lsd_kpt7',
+ id=225,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt37'),
+ 226:
+ dict(
+ name='lsd_kpt8',
+ id=226,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt36'),
+ 227:
+ dict(
+ name='lsd_kpt9',
+ id=227,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt35'),
+ 228:
+ dict(
+ name='lsd_kpt10',
+ id=228,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt34'),
+ 229:
+ dict(
+ name='lsd_kpt11',
+ id=229,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt33'),
+ 230:
+ dict(
+ name='lsd_kpt12',
+ id=230,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt32'),
+ 231:
+ dict(
+ name='lsd_kpt13',
+ id=231,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt31'),
+ 232:
+ dict(
+ name='lsd_kpt14',
+ id=232,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt30'),
+ 233:
+ dict(
+ name='lsd_kpt15',
+ id=233,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt29'),
+ 234:
+ dict(
+ name='lsd_kpt16',
+ id=234,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt28'),
+ 235:
+ dict(
+ name='lsd_kpt17',
+ id=235,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt27'),
+ 236:
+ dict(
+ name='lsd_kpt18',
+ id=236,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt26'),
+ 237:
+ dict(
+ name='lsd_kpt19',
+ id=237,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt25'),
+ 238:
+ dict(
+ name='lsd_kpt20',
+ id=238,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt24'),
+ 239:
+ dict(
+ name='lsd_kpt21',
+ id=239,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt23'),
+ 240:
+ dict(name='lsd_kpt22', id=240, color=colors['lsd'], type='', swap=''),
+ 241:
+ dict(
+ name='lsd_kpt23',
+ id=241,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt21'),
+ 242:
+ dict(
+ name='lsd_kpt24',
+ id=242,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt20'),
+ 243:
+ dict(
+ name='lsd_kpt25',
+ id=243,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt19'),
+ 244:
+ dict(
+ name='lsd_kpt26',
+ id=244,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt18'),
+ 245:
+ dict(
+ name='lsd_kpt27',
+ id=245,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt17'),
+ 246:
+ dict(
+ name='lsd_kpt28',
+ id=246,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt16'),
+ 247:
+ dict(
+ name='lsd_kpt29',
+ id=247,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt15'),
+ 248:
+ dict(
+ name='lsd_kpt30',
+ id=248,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt14'),
+ 249:
+ dict(
+ name='lsd_kpt31',
+ id=249,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt13'),
+ 250:
+ dict(
+ name='lsd_kpt32',
+ id=250,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt12'),
+ 251:
+ dict(
+ name='lsd_kpt33',
+ id=251,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt11'),
+ 252:
+ dict(
+ name='lsd_kpt34',
+ id=252,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt10'),
+ 253:
+ dict(
+ name='lsd_kpt35',
+ id=253,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt9'),
+ 254:
+ dict(
+ name='lsd_kpt36',
+ id=254,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt8'),
+ 255:
+ dict(
+ name='lsd_kpt37',
+ id=255,
+ color=colors['lsd'],
+ type='',
+ swap='lsd_kpt7'),
+ # vest_dress
+ 256:
+ dict(name='vd_kpt1', id=256, color=colors['vd'], type='', swap=''),
+ 257:
+ dict(
+ name='vd_kpt2',
+ id=257,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt6'),
+ 258:
+ dict(
+ name='vd_kpt3',
+ id=258,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt5'),
+ 259:
+ dict(name='vd_kpt4', id=259, color=colors['vd'], type='', swap=''),
+ 260:
+ dict(
+ name='vd_kpt5',
+ id=260,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt3'),
+ 261:
+ dict(
+ name='vd_kpt6',
+ id=261,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt2'),
+ 262:
+ dict(
+ name='vd_kpt7',
+ id=262,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt19'),
+ 263:
+ dict(
+ name='vd_kpt8',
+ id=263,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt18'),
+ 264:
+ dict(
+ name='vd_kpt9',
+ id=264,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt17'),
+ 265:
+ dict(
+ name='vd_kpt10',
+ id=265,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt16'),
+ 266:
+ dict(
+ name='vd_kpt11',
+ id=266,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt15'),
+ 267:
+ dict(
+ name='vd_kpt12',
+ id=267,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt14'),
+ 268:
+ dict(name='vd_kpt13', id=268, color=colors['vd'], type='', swap=''),
+ 269:
+ dict(
+ name='vd_kpt14',
+ id=269,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt12'),
+ 270:
+ dict(
+ name='vd_kpt15',
+ id=270,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt11'),
+ 271:
+ dict(
+ name='vd_kpt16',
+ id=271,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt10'),
+ 272:
+ dict(
+ name='vd_kpt17',
+ id=272,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt9'),
+ 273:
+ dict(
+ name='vd_kpt18',
+ id=273,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt8'),
+ 274:
+ dict(
+ name='vd_kpt19',
+ id=274,
+ color=colors['vd'],
+ type='',
+ swap='vd_kpt7'),
+ # sling_dress
+ 275:
+ dict(name='sd_kpt1', id=275, color=colors['sd'], type='', swap=''),
+ 276:
+ dict(
+ name='sd_kpt2',
+ id=276,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt6'),
+ 277:
+ dict(
+ name='sd_kpt3',
+ id=277,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt5'),
+ 278:
+ dict(name='sd_kpt4', id=278, color=colors['sd'], type='', swap=''),
+ 279:
+ dict(
+ name='sd_kpt5',
+ id=279,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt3'),
+ 280:
+ dict(
+ name='sd_kpt6',
+ id=280,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt2'),
+ 281:
+ dict(
+ name='sd_kpt7',
+ id=281,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt19'),
+ 282:
+ dict(
+ name='sd_kpt8',
+ id=282,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt18'),
+ 283:
+ dict(
+ name='sd_kpt9',
+ id=283,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt17'),
+ 284:
+ dict(
+ name='sd_kpt10',
+ id=284,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt16'),
+ 285:
+ dict(
+ name='sd_kpt11',
+ id=285,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt15'),
+ 286:
+ dict(
+ name='sd_kpt12',
+ id=286,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt14'),
+ 287:
+ dict(name='sd_kpt13', id=287, color=colors['sd'], type='', swap=''),
+ 288:
+ dict(
+ name='sd_kpt14',
+ id=288,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt12'),
+ 289:
+ dict(
+ name='sd_kpt15',
+ id=289,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt11'),
+ 290:
+ dict(
+ name='sd_kpt16',
+ id=290,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt10'),
+ 291:
+ dict(
+ name='sd_kpt17',
+ id=291,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt9'),
+ 292:
+ dict(
+ name='sd_kpt18',
+ id=292,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt8'),
+ 293:
+ dict(
+ name='sd_kpt19',
+ id=293,
+ color=colors['sd'],
+ type='',
+ swap='sd_kpt7'),
+ },
+ skeleton_info={
+ # short_sleeved_shirt
+ 0:
+ dict(link=('sss_kpt1', 'sss_kpt2'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('sss_kpt2', 'sss_kpt7'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('sss_kpt7', 'sss_kpt8'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('sss_kpt8', 'sss_kpt9'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('sss_kpt9', 'sss_kpt10'), id=4, color=[255, 128, 0]),
+ 5:
+ dict(link=('sss_kpt10', 'sss_kpt11'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(link=('sss_kpt11', 'sss_kpt12'), id=6, color=[255, 128, 0]),
+ 7:
+ dict(link=('sss_kpt12', 'sss_kpt13'), id=7, color=[255, 128, 0]),
+ 8:
+ dict(link=('sss_kpt13', 'sss_kpt14'), id=8, color=[255, 128, 0]),
+ 9:
+ dict(link=('sss_kpt14', 'sss_kpt15'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('sss_kpt15', 'sss_kpt16'), id=10, color=[255, 128, 0]),
+ 11:
+ dict(link=('sss_kpt16', 'sss_kpt17'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('sss_kpt17', 'sss_kpt18'), id=12, color=[255, 128, 0]),
+ 13:
+ dict(link=('sss_kpt18', 'sss_kpt19'), id=13, color=[255, 128, 0]),
+ 14:
+ dict(link=('sss_kpt19', 'sss_kpt20'), id=14, color=[255, 128, 0]),
+ 15:
+ dict(link=('sss_kpt20', 'sss_kpt21'), id=15, color=[255, 128, 0]),
+ 16:
+ dict(link=('sss_kpt21', 'sss_kpt22'), id=16, color=[255, 128, 0]),
+ 17:
+ dict(link=('sss_kpt22', 'sss_kpt23'), id=17, color=[255, 128, 0]),
+ 18:
+ dict(link=('sss_kpt23', 'sss_kpt24'), id=18, color=[255, 128, 0]),
+ 19:
+ dict(link=('sss_kpt24', 'sss_kpt25'), id=19, color=[255, 128, 0]),
+ 20:
+ dict(link=('sss_kpt25', 'sss_kpt6'), id=20, color=[255, 128, 0]),
+ 21:
+ dict(link=('sss_kpt6', 'sss_kpt1'), id=21, color=[255, 128, 0]),
+ 22:
+ dict(link=('sss_kpt2', 'sss_kpt3'), id=22, color=[255, 128, 0]),
+ 23:
+ dict(link=('sss_kpt3', 'sss_kpt4'), id=23, color=[255, 128, 0]),
+ 24:
+ dict(link=('sss_kpt4', 'sss_kpt5'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(link=('sss_kpt5', 'sss_kpt6'), id=25, color=[255, 128, 0]),
+ # long_sleeve_shirt
+ 26:
+ dict(link=('lss_kpt1', 'lss_kpt2'), id=26, color=[255, 0, 128]),
+ 27:
+ dict(link=('lss_kpt2', 'lss_kpt7'), id=27, color=[255, 0, 128]),
+ 28:
+ dict(link=('lss_kpt7', 'lss_kpt8'), id=28, color=[255, 0, 128]),
+ 29:
+ dict(link=('lss_kpt8', 'lss_kpt9'), id=29, color=[255, 0, 128]),
+ 30:
+ dict(link=('lss_kpt9', 'lss_kpt10'), id=30, color=[255, 0, 128]),
+ 31:
+ dict(link=('lss_kpt10', 'lss_kpt11'), id=31, color=[255, 0, 128]),
+ 32:
+ dict(link=('lss_kpt11', 'lss_kpt12'), id=32, color=[255, 0, 128]),
+ 33:
+ dict(link=('lss_kpt12', 'lss_kpt13'), id=33, color=[255, 0, 128]),
+ 34:
+ dict(link=('lss_kpt13', 'lss_kpt14'), id=34, color=[255, 0, 128]),
+ 35:
+ dict(link=('lss_kpt14', 'lss_kpt15'), id=35, color=[255, 0, 128]),
+ 36:
+ dict(link=('lss_kpt15', 'lss_kpt16'), id=36, color=[255, 0, 128]),
+ 37:
+ dict(link=('lss_kpt16', 'lss_kpt17'), id=37, color=[255, 0, 128]),
+ 38:
+ dict(link=('lss_kpt17', 'lss_kpt18'), id=38, color=[255, 0, 128]),
+ 39:
+ dict(link=('lss_kpt18', 'lss_kpt19'), id=39, color=[255, 0, 128]),
+ 40:
+ dict(link=('lss_kpt19', 'lss_kpt20'), id=40, color=[255, 0, 128]),
+ 41:
+ dict(link=('lss_kpt20', 'lss_kpt21'), id=41, color=[255, 0, 128]),
+ 42:
+ dict(link=('lss_kpt21', 'lss_kpt22'), id=42, color=[255, 0, 128]),
+ 43:
+ dict(link=('lss_kpt22', 'lss_kpt23'), id=43, color=[255, 0, 128]),
+ 44:
+ dict(link=('lss_kpt23', 'lss_kpt24'), id=44, color=[255, 0, 128]),
+ 45:
+ dict(link=('lss_kpt24', 'lss_kpt25'), id=45, color=[255, 0, 128]),
+ 46:
+ dict(link=('lss_kpt25', 'lss_kpt26'), id=46, color=[255, 0, 128]),
+ 47:
+ dict(link=('lss_kpt26', 'lss_kpt27'), id=47, color=[255, 0, 128]),
+ 48:
+ dict(link=('lss_kpt27', 'lss_kpt28'), id=48, color=[255, 0, 128]),
+ 49:
+ dict(link=('lss_kpt28', 'lss_kpt29'), id=49, color=[255, 0, 128]),
+ 50:
+ dict(link=('lss_kpt29', 'lss_kpt30'), id=50, color=[255, 0, 128]),
+ 51:
+ dict(link=('lss_kpt30', 'lss_kpt31'), id=51, color=[255, 0, 128]),
+ 52:
+ dict(link=('lss_kpt31', 'lss_kpt32'), id=52, color=[255, 0, 128]),
+ 53:
+ dict(link=('lss_kpt32', 'lss_kpt33'), id=53, color=[255, 0, 128]),
+ 54:
+ dict(link=('lss_kpt33', 'lss_kpt6'), id=54, color=[255, 0, 128]),
+ 55:
+ dict(link=('lss_kpt6', 'lss_kpt5'), id=55, color=[255, 0, 128]),
+ 56:
+ dict(link=('lss_kpt5', 'lss_kpt4'), id=56, color=[255, 0, 128]),
+ 57:
+ dict(link=('lss_kpt4', 'lss_kpt3'), id=57, color=[255, 0, 128]),
+ 58:
+ dict(link=('lss_kpt3', 'lss_kpt2'), id=58, color=[255, 0, 128]),
+ 59:
+ dict(link=('lss_kpt6', 'lss_kpt1'), id=59, color=[255, 0, 128]),
+ # short_sleeved_outwear
+ 60:
+ dict(link=('sso_kpt1', 'sso_kpt4'), id=60, color=[128, 0, 255]),
+ 61:
+ dict(link=('sso_kpt4', 'sso_kpt7'), id=61, color=[128, 0, 255]),
+ 62:
+ dict(link=('sso_kpt7', 'sso_kpt8'), id=62, color=[128, 0, 255]),
+ 63:
+ dict(link=('sso_kpt8', 'sso_kpt9'), id=63, color=[128, 0, 255]),
+ 64:
+ dict(link=('sso_kpt9', 'sso_kpt10'), id=64, color=[128, 0, 255]),
+ 65:
+ dict(link=('sso_kpt10', 'sso_kpt11'), id=65, color=[128, 0, 255]),
+ 66:
+ dict(link=('sso_kpt11', 'sso_kpt12'), id=66, color=[128, 0, 255]),
+ 67:
+ dict(link=('sso_kpt12', 'sso_kpt13'), id=67, color=[128, 0, 255]),
+ 68:
+ dict(link=('sso_kpt13', 'sso_kpt14'), id=68, color=[128, 0, 255]),
+ 69:
+ dict(link=('sso_kpt14', 'sso_kpt15'), id=69, color=[128, 0, 255]),
+ 70:
+ dict(link=('sso_kpt15', 'sso_kpt16'), id=70, color=[128, 0, 255]),
+ 71:
+ dict(link=('sso_kpt16', 'sso_kpt31'), id=71, color=[128, 0, 255]),
+ 72:
+ dict(link=('sso_kpt31', 'sso_kpt30'), id=72, color=[128, 0, 255]),
+ 73:
+ dict(link=('sso_kpt30', 'sso_kpt2'), id=73, color=[128, 0, 255]),
+ 74:
+ dict(link=('sso_kpt2', 'sso_kpt3'), id=74, color=[128, 0, 255]),
+ 75:
+ dict(link=('sso_kpt3', 'sso_kpt4'), id=75, color=[128, 0, 255]),
+ 76:
+ dict(link=('sso_kpt1', 'sso_kpt6'), id=76, color=[128, 0, 255]),
+ 77:
+ dict(link=('sso_kpt6', 'sso_kpt25'), id=77, color=[128, 0, 255]),
+ 78:
+ dict(link=('sso_kpt25', 'sso_kpt24'), id=78, color=[128, 0, 255]),
+ 79:
+ dict(link=('sso_kpt24', 'sso_kpt23'), id=79, color=[128, 0, 255]),
+ 80:
+ dict(link=('sso_kpt23', 'sso_kpt22'), id=80, color=[128, 0, 255]),
+ 81:
+ dict(link=('sso_kpt22', 'sso_kpt21'), id=81, color=[128, 0, 255]),
+ 82:
+ dict(link=('sso_kpt21', 'sso_kpt20'), id=82, color=[128, 0, 255]),
+ 83:
+ dict(link=('sso_kpt20', 'sso_kpt19'), id=83, color=[128, 0, 255]),
+ 84:
+ dict(link=('sso_kpt19', 'sso_kpt18'), id=84, color=[128, 0, 255]),
+ 85:
+ dict(link=('sso_kpt18', 'sso_kpt17'), id=85, color=[128, 0, 255]),
+ 86:
+ dict(link=('sso_kpt17', 'sso_kpt29'), id=86, color=[128, 0, 255]),
+ 87:
+ dict(link=('sso_kpt29', 'sso_kpt28'), id=87, color=[128, 0, 255]),
+ 88:
+ dict(link=('sso_kpt28', 'sso_kpt27'), id=88, color=[128, 0, 255]),
+ 89:
+ dict(link=('sso_kpt27', 'sso_kpt26'), id=89, color=[128, 0, 255]),
+ 90:
+ dict(link=('sso_kpt26', 'sso_kpt5'), id=90, color=[128, 0, 255]),
+ 91:
+ dict(link=('sso_kpt5', 'sso_kpt6'), id=91, color=[128, 0, 255]),
+ # long_sleeved_outwear
+ 92:
+ dict(link=('lso_kpt1', 'lso_kpt2'), id=92, color=[0, 128, 255]),
+ 93:
+ dict(link=('lso_kpt2', 'lso_kpt7'), id=93, color=[0, 128, 255]),
+ 94:
+ dict(link=('lso_kpt7', 'lso_kpt8'), id=94, color=[0, 128, 255]),
+ 95:
+ dict(link=('lso_kpt8', 'lso_kpt9'), id=95, color=[0, 128, 255]),
+ 96:
+ dict(link=('lso_kpt9', 'lso_kpt10'), id=96, color=[0, 128, 255]),
+ 97:
+ dict(link=('lso_kpt10', 'lso_kpt11'), id=97, color=[0, 128, 255]),
+ 98:
+ dict(link=('lso_kpt11', 'lso_kpt12'), id=98, color=[0, 128, 255]),
+ 99:
+ dict(link=('lso_kpt12', 'lso_kpt13'), id=99, color=[0, 128, 255]),
+ 100:
+ dict(link=('lso_kpt13', 'lso_kpt14'), id=100, color=[0, 128, 255]),
+ 101:
+ dict(link=('lso_kpt14', 'lso_kpt15'), id=101, color=[0, 128, 255]),
+ 102:
+ dict(link=('lso_kpt15', 'lso_kpt16'), id=102, color=[0, 128, 255]),
+ 103:
+ dict(link=('lso_kpt16', 'lso_kpt17'), id=103, color=[0, 128, 255]),
+ 104:
+ dict(link=('lso_kpt17', 'lso_kpt18'), id=104, color=[0, 128, 255]),
+ 105:
+ dict(link=('lso_kpt18', 'lso_kpt19'), id=105, color=[0, 128, 255]),
+ 106:
+ dict(link=('lso_kpt19', 'lso_kpt20'), id=106, color=[0, 128, 255]),
+ 107:
+ dict(link=('lso_kpt20', 'lso_kpt39'), id=107, color=[0, 128, 255]),
+ 108:
+ dict(link=('lso_kpt39', 'lso_kpt38'), id=108, color=[0, 128, 255]),
+ 109:
+ dict(link=('lso_kpt38', 'lso_kpt4'), id=109, color=[0, 128, 255]),
+ 110:
+ dict(link=('lso_kpt4', 'lso_kpt3'), id=110, color=[0, 128, 255]),
+ 111:
+ dict(link=('lso_kpt3', 'lso_kpt2'), id=111, color=[0, 128, 255]),
+ 112:
+ dict(link=('lso_kpt1', 'lso_kpt6'), id=112, color=[0, 128, 255]),
+ 113:
+ dict(link=('lso_kpt6', 'lso_kpt33'), id=113, color=[0, 128, 255]),
+ 114:
+ dict(link=('lso_kpt33', 'lso_kpt32'), id=114, color=[0, 128, 255]),
+ 115:
+ dict(link=('lso_kpt32', 'lso_kpt31'), id=115, color=[0, 128, 255]),
+ 116:
+ dict(link=('lso_kpt31', 'lso_kpt30'), id=116, color=[0, 128, 255]),
+ 117:
+ dict(link=('lso_kpt30', 'lso_kpt29'), id=117, color=[0, 128, 255]),
+ 118:
+ dict(link=('lso_kpt29', 'lso_kpt28'), id=118, color=[0, 128, 255]),
+ 119:
+ dict(link=('lso_kpt28', 'lso_kpt27'), id=119, color=[0, 128, 255]),
+ 120:
+ dict(link=('lso_kpt27', 'lso_kpt26'), id=120, color=[0, 128, 255]),
+ 121:
+ dict(link=('lso_kpt26', 'lso_kpt25'), id=121, color=[0, 128, 255]),
+ 122:
+ dict(link=('lso_kpt25', 'lso_kpt24'), id=122, color=[0, 128, 255]),
+ 123:
+ dict(link=('lso_kpt24', 'lso_kpt23'), id=123, color=[0, 128, 255]),
+ 124:
+ dict(link=('lso_kpt23', 'lso_kpt22'), id=124, color=[0, 128, 255]),
+ 125:
+ dict(link=('lso_kpt22', 'lso_kpt21'), id=125, color=[0, 128, 255]),
+ 126:
+ dict(link=('lso_kpt21', 'lso_kpt37'), id=126, color=[0, 128, 255]),
+ 127:
+ dict(link=('lso_kpt37', 'lso_kpt36'), id=127, color=[0, 128, 255]),
+ 128:
+ dict(link=('lso_kpt36', 'lso_kpt35'), id=128, color=[0, 128, 255]),
+ 129:
+ dict(link=('lso_kpt35', 'lso_kpt34'), id=129, color=[0, 128, 255]),
+ 130:
+ dict(link=('lso_kpt34', 'lso_kpt5'), id=130, color=[0, 128, 255]),
+ 131:
+ dict(link=('lso_kpt5', 'lso_kpt6'), id=131, color=[0, 128, 255]),
+ # vest
+ 132:
+ dict(link=('vest_kpt1', 'vest_kpt2'), id=132, color=[0, 128, 128]),
+ 133:
+ dict(link=('vest_kpt2', 'vest_kpt7'), id=133, color=[0, 128, 128]),
+ 134:
+ dict(link=('vest_kpt7', 'vest_kpt8'), id=134, color=[0, 128, 128]),
+ 135:
+ dict(link=('vest_kpt8', 'vest_kpt9'), id=135, color=[0, 128, 128]),
+ 136:
+ dict(link=('vest_kpt9', 'vest_kpt10'), id=136, color=[0, 128, 128]),
+ 137:
+ dict(link=('vest_kpt10', 'vest_kpt11'), id=137, color=[0, 128, 128]),
+ 138:
+ dict(link=('vest_kpt11', 'vest_kpt12'), id=138, color=[0, 128, 128]),
+ 139:
+ dict(link=('vest_kpt12', 'vest_kpt13'), id=139, color=[0, 128, 128]),
+ 140:
+ dict(link=('vest_kpt13', 'vest_kpt14'), id=140, color=[0, 128, 128]),
+ 141:
+ dict(link=('vest_kpt14', 'vest_kpt15'), id=141, color=[0, 128, 128]),
+ 142:
+ dict(link=('vest_kpt15', 'vest_kpt6'), id=142, color=[0, 128, 128]),
+ 143:
+ dict(link=('vest_kpt6', 'vest_kpt1'), id=143, color=[0, 128, 128]),
+ 144:
+ dict(link=('vest_kpt2', 'vest_kpt3'), id=144, color=[0, 128, 128]),
+ 145:
+ dict(link=('vest_kpt3', 'vest_kpt4'), id=145, color=[0, 128, 128]),
+ 146:
+ dict(link=('vest_kpt4', 'vest_kpt5'), id=146, color=[0, 128, 128]),
+ 147:
+ dict(link=('vest_kpt5', 'vest_kpt6'), id=147, color=[0, 128, 128]),
+ # sling
+ 148:
+ dict(link=('sling_kpt1', 'sling_kpt2'), id=148, color=[0, 0, 128]),
+ 149:
+ dict(link=('sling_kpt2', 'sling_kpt8'), id=149, color=[0, 0, 128]),
+ 150:
+ dict(link=('sling_kpt8', 'sling_kpt9'), id=150, color=[0, 0, 128]),
+ 151:
+ dict(link=('sling_kpt9', 'sling_kpt10'), id=151, color=[0, 0, 128]),
+ 152:
+ dict(link=('sling_kpt10', 'sling_kpt11'), id=152, color=[0, 0, 128]),
+ 153:
+ dict(link=('sling_kpt11', 'sling_kpt12'), id=153, color=[0, 0, 128]),
+ 154:
+ dict(link=('sling_kpt12', 'sling_kpt13'), id=154, color=[0, 0, 128]),
+ 155:
+ dict(link=('sling_kpt13', 'sling_kpt14'), id=155, color=[0, 0, 128]),
+ 156:
+ dict(link=('sling_kpt14', 'sling_kpt6'), id=156, color=[0, 0, 128]),
+ 157:
+ dict(link=('sling_kpt2', 'sling_kpt7'), id=157, color=[0, 0, 128]),
+ 158:
+ dict(link=('sling_kpt6', 'sling_kpt15'), id=158, color=[0, 0, 128]),
+ 159:
+ dict(link=('sling_kpt2', 'sling_kpt3'), id=159, color=[0, 0, 128]),
+ 160:
+ dict(link=('sling_kpt3', 'sling_kpt4'), id=160, color=[0, 0, 128]),
+ 161:
+ dict(link=('sling_kpt4', 'sling_kpt5'), id=161, color=[0, 0, 128]),
+ 162:
+ dict(link=('sling_kpt5', 'sling_kpt6'), id=162, color=[0, 0, 128]),
+ 163:
+ dict(link=('sling_kpt1', 'sling_kpt6'), id=163, color=[0, 0, 128]),
+ # shorts
+ 164:
+ dict(
+ link=('shorts_kpt1', 'shorts_kpt4'), id=164, color=[128, 128,
+ 128]),
+ 165:
+ dict(
+ link=('shorts_kpt4', 'shorts_kpt5'), id=165, color=[128, 128,
+ 128]),
+ 166:
+ dict(
+ link=('shorts_kpt5', 'shorts_kpt6'), id=166, color=[128, 128,
+ 128]),
+ 167:
+ dict(
+ link=('shorts_kpt6', 'shorts_kpt7'), id=167, color=[128, 128,
+ 128]),
+ 168:
+ dict(
+ link=('shorts_kpt7', 'shorts_kpt8'), id=168, color=[128, 128,
+ 128]),
+ 169:
+ dict(
+ link=('shorts_kpt8', 'shorts_kpt9'), id=169, color=[128, 128,
+ 128]),
+ 170:
+ dict(
+ link=('shorts_kpt9', 'shorts_kpt10'),
+ id=170,
+ color=[128, 128, 128]),
+ 171:
+ dict(
+ link=('shorts_kpt10', 'shorts_kpt3'),
+ id=171,
+ color=[128, 128, 128]),
+ 172:
+ dict(
+ link=('shorts_kpt3', 'shorts_kpt2'), id=172, color=[128, 128,
+ 128]),
+ 173:
+ dict(
+ link=('shorts_kpt2', 'shorts_kpt1'), id=173, color=[128, 128,
+ 128]),
+ # trousers
+ 174:
+ dict(
+ link=('trousers_kpt1', 'trousers_kpt4'),
+ id=174,
+ color=[128, 0, 128]),
+ 175:
+ dict(
+ link=('trousers_kpt4', 'trousers_kpt5'),
+ id=175,
+ color=[128, 0, 128]),
+ 176:
+ dict(
+ link=('trousers_kpt5', 'trousers_kpt6'),
+ id=176,
+ color=[128, 0, 128]),
+ 177:
+ dict(
+ link=('trousers_kpt6', 'trousers_kpt7'),
+ id=177,
+ color=[128, 0, 128]),
+ 178:
+ dict(
+ link=('trousers_kpt7', 'trousers_kpt8'),
+ id=178,
+ color=[128, 0, 128]),
+ 179:
+ dict(
+ link=('trousers_kpt8', 'trousers_kpt9'),
+ id=179,
+ color=[128, 0, 128]),
+ 180:
+ dict(
+ link=('trousers_kpt9', 'trousers_kpt10'),
+ id=180,
+ color=[128, 0, 128]),
+ 181:
+ dict(
+ link=('trousers_kpt10', 'trousers_kpt11'),
+ id=181,
+ color=[128, 0, 128]),
+ 182:
+ dict(
+ link=('trousers_kpt11', 'trousers_kpt12'),
+ id=182,
+ color=[128, 0, 128]),
+ 183:
+ dict(
+ link=('trousers_kpt12', 'trousers_kpt13'),
+ id=183,
+ color=[128, 0, 128]),
+ 184:
+ dict(
+ link=('trousers_kpt13', 'trousers_kpt14'),
+ id=184,
+ color=[128, 0, 128]),
+ 185:
+ dict(
+ link=('trousers_kpt14', 'trousers_kpt3'),
+ id=185,
+ color=[128, 0, 128]),
+ 186:
+ dict(
+ link=('trousers_kpt3', 'trousers_kpt2'),
+ id=186,
+ color=[128, 0, 128]),
+ 187:
+ dict(
+ link=('trousers_kpt2', 'trousers_kpt1'),
+ id=187,
+ color=[128, 0, 128]),
+ # skirt
+ 188:
+ dict(link=('skirt_kpt1', 'skirt_kpt4'), id=188, color=[64, 128, 128]),
+ 189:
+ dict(link=('skirt_kpt4', 'skirt_kpt5'), id=189, color=[64, 128, 128]),
+ 190:
+ dict(link=('skirt_kpt5', 'skirt_kpt6'), id=190, color=[64, 128, 128]),
+ 191:
+ dict(link=('skirt_kpt6', 'skirt_kpt7'), id=191, color=[64, 128, 128]),
+ 192:
+ dict(link=('skirt_kpt7', 'skirt_kpt8'), id=192, color=[64, 128, 128]),
+ 193:
+ dict(link=('skirt_kpt8', 'skirt_kpt3'), id=193, color=[64, 128, 128]),
+ 194:
+ dict(link=('skirt_kpt3', 'skirt_kpt2'), id=194, color=[64, 128, 128]),
+ 195:
+ dict(link=('skirt_kpt2', 'skirt_kpt1'), id=195, color=[64, 128, 128]),
+ # short_sleeved_dress
+ 196:
+ dict(link=('ssd_kpt1', 'ssd_kpt2'), id=196, color=[64, 64, 128]),
+ 197:
+ dict(link=('ssd_kpt2', 'ssd_kpt7'), id=197, color=[64, 64, 128]),
+ 198:
+ dict(link=('ssd_kpt7', 'ssd_kpt8'), id=198, color=[64, 64, 128]),
+ 199:
+ dict(link=('ssd_kpt8', 'ssd_kpt9'), id=199, color=[64, 64, 128]),
+ 200:
+ dict(link=('ssd_kpt9', 'ssd_kpt10'), id=200, color=[64, 64, 128]),
+ 201:
+ dict(link=('ssd_kpt10', 'ssd_kpt11'), id=201, color=[64, 64, 128]),
+ 202:
+ dict(link=('ssd_kpt11', 'ssd_kpt12'), id=202, color=[64, 64, 128]),
+ 203:
+ dict(link=('ssd_kpt12', 'ssd_kpt13'), id=203, color=[64, 64, 128]),
+ 204:
+ dict(link=('ssd_kpt13', 'ssd_kpt14'), id=204, color=[64, 64, 128]),
+ 205:
+ dict(link=('ssd_kpt14', 'ssd_kpt15'), id=205, color=[64, 64, 128]),
+ 206:
+ dict(link=('ssd_kpt15', 'ssd_kpt16'), id=206, color=[64, 64, 128]),
+ 207:
+ dict(link=('ssd_kpt16', 'ssd_kpt17'), id=207, color=[64, 64, 128]),
+ 208:
+ dict(link=('ssd_kpt17', 'ssd_kpt18'), id=208, color=[64, 64, 128]),
+ 209:
+ dict(link=('ssd_kpt18', 'ssd_kpt19'), id=209, color=[64, 64, 128]),
+ 210:
+ dict(link=('ssd_kpt19', 'ssd_kpt20'), id=210, color=[64, 64, 128]),
+ 211:
+ dict(link=('ssd_kpt20', 'ssd_kpt21'), id=211, color=[64, 64, 128]),
+ 212:
+ dict(link=('ssd_kpt21', 'ssd_kpt22'), id=212, color=[64, 64, 128]),
+ 213:
+ dict(link=('ssd_kpt22', 'ssd_kpt23'), id=213, color=[64, 64, 128]),
+ 214:
+ dict(link=('ssd_kpt23', 'ssd_kpt24'), id=214, color=[64, 64, 128]),
+ 215:
+ dict(link=('ssd_kpt24', 'ssd_kpt25'), id=215, color=[64, 64, 128]),
+ 216:
+ dict(link=('ssd_kpt25', 'ssd_kpt26'), id=216, color=[64, 64, 128]),
+ 217:
+ dict(link=('ssd_kpt26', 'ssd_kpt27'), id=217, color=[64, 64, 128]),
+ 218:
+ dict(link=('ssd_kpt27', 'ssd_kpt28'), id=218, color=[64, 64, 128]),
+ 219:
+ dict(link=('ssd_kpt28', 'ssd_kpt29'), id=219, color=[64, 64, 128]),
+ 220:
+ dict(link=('ssd_kpt29', 'ssd_kpt6'), id=220, color=[64, 64, 128]),
+ 221:
+ dict(link=('ssd_kpt6', 'ssd_kpt5'), id=221, color=[64, 64, 128]),
+ 222:
+ dict(link=('ssd_kpt5', 'ssd_kpt4'), id=222, color=[64, 64, 128]),
+ 223:
+ dict(link=('ssd_kpt4', 'ssd_kpt3'), id=223, color=[64, 64, 128]),
+ 224:
+ dict(link=('ssd_kpt3', 'ssd_kpt2'), id=224, color=[64, 64, 128]),
+ 225:
+ dict(link=('ssd_kpt6', 'ssd_kpt1'), id=225, color=[64, 64, 128]),
+ # long_sleeved_dress
+ 226:
+ dict(link=('lsd_kpt1', 'lsd_kpt2'), id=226, color=[128, 64, 0]),
+ 227:
+ dict(link=('lsd_kpt2', 'lsd_kpt7'), id=228, color=[128, 64, 0]),
+ 228:
+ dict(link=('lsd_kpt7', 'lsd_kpt8'), id=228, color=[128, 64, 0]),
+ 229:
+ dict(link=('lsd_kpt8', 'lsd_kpt9'), id=229, color=[128, 64, 0]),
+ 230:
+ dict(link=('lsd_kpt9', 'lsd_kpt10'), id=230, color=[128, 64, 0]),
+ 231:
+ dict(link=('lsd_kpt10', 'lsd_kpt11'), id=231, color=[128, 64, 0]),
+ 232:
+ dict(link=('lsd_kpt11', 'lsd_kpt12'), id=232, color=[128, 64, 0]),
+ 233:
+ dict(link=('lsd_kpt12', 'lsd_kpt13'), id=233, color=[128, 64, 0]),
+ 234:
+ dict(link=('lsd_kpt13', 'lsd_kpt14'), id=234, color=[128, 64, 0]),
+ 235:
+ dict(link=('lsd_kpt14', 'lsd_kpt15'), id=235, color=[128, 64, 0]),
+ 236:
+ dict(link=('lsd_kpt15', 'lsd_kpt16'), id=236, color=[128, 64, 0]),
+ 237:
+ dict(link=('lsd_kpt16', 'lsd_kpt17'), id=237, color=[128, 64, 0]),
+ 238:
+ dict(link=('lsd_kpt17', 'lsd_kpt18'), id=238, color=[128, 64, 0]),
+ 239:
+ dict(link=('lsd_kpt18', 'lsd_kpt19'), id=239, color=[128, 64, 0]),
+ 240:
+ dict(link=('lsd_kpt19', 'lsd_kpt20'), id=240, color=[128, 64, 0]),
+ 241:
+ dict(link=('lsd_kpt20', 'lsd_kpt21'), id=241, color=[128, 64, 0]),
+ 242:
+ dict(link=('lsd_kpt21', 'lsd_kpt22'), id=242, color=[128, 64, 0]),
+ 243:
+ dict(link=('lsd_kpt22', 'lsd_kpt23'), id=243, color=[128, 64, 0]),
+ 244:
+ dict(link=('lsd_kpt23', 'lsd_kpt24'), id=244, color=[128, 64, 0]),
+ 245:
+ dict(link=('lsd_kpt24', 'lsd_kpt25'), id=245, color=[128, 64, 0]),
+ 246:
+ dict(link=('lsd_kpt25', 'lsd_kpt26'), id=246, color=[128, 64, 0]),
+ 247:
+ dict(link=('lsd_kpt26', 'lsd_kpt27'), id=247, color=[128, 64, 0]),
+ 248:
+ dict(link=('lsd_kpt27', 'lsd_kpt28'), id=248, color=[128, 64, 0]),
+ 249:
+ dict(link=('lsd_kpt28', 'lsd_kpt29'), id=249, color=[128, 64, 0]),
+ 250:
+ dict(link=('lsd_kpt29', 'lsd_kpt30'), id=250, color=[128, 64, 0]),
+ 251:
+ dict(link=('lsd_kpt30', 'lsd_kpt31'), id=251, color=[128, 64, 0]),
+ 252:
+ dict(link=('lsd_kpt31', 'lsd_kpt32'), id=252, color=[128, 64, 0]),
+ 253:
+ dict(link=('lsd_kpt32', 'lsd_kpt33'), id=253, color=[128, 64, 0]),
+ 254:
+ dict(link=('lsd_kpt33', 'lsd_kpt34'), id=254, color=[128, 64, 0]),
+ 255:
+ dict(link=('lsd_kpt34', 'lsd_kpt35'), id=255, color=[128, 64, 0]),
+ 256:
+ dict(link=('lsd_kpt35', 'lsd_kpt36'), id=256, color=[128, 64, 0]),
+ 257:
+ dict(link=('lsd_kpt36', 'lsd_kpt37'), id=257, color=[128, 64, 0]),
+ 258:
+ dict(link=('lsd_kpt37', 'lsd_kpt6'), id=258, color=[128, 64, 0]),
+ 259:
+ dict(link=('lsd_kpt6', 'lsd_kpt5'), id=259, color=[128, 64, 0]),
+ 260:
+ dict(link=('lsd_kpt5', 'lsd_kpt4'), id=260, color=[128, 64, 0]),
+ 261:
+ dict(link=('lsd_kpt4', 'lsd_kpt3'), id=261, color=[128, 64, 0]),
+ 262:
+ dict(link=('lsd_kpt3', 'lsd_kpt2'), id=262, color=[128, 64, 0]),
+ 263:
+ dict(link=('lsd_kpt6', 'lsd_kpt1'), id=263, color=[128, 64, 0]),
+ # vest_dress
+ 264:
+ dict(link=('vd_kpt1', 'vd_kpt2'), id=264, color=[128, 64, 255]),
+ 265:
+ dict(link=('vd_kpt2', 'vd_kpt7'), id=265, color=[128, 64, 255]),
+ 266:
+ dict(link=('vd_kpt7', 'vd_kpt8'), id=266, color=[128, 64, 255]),
+ 267:
+ dict(link=('vd_kpt8', 'vd_kpt9'), id=267, color=[128, 64, 255]),
+ 268:
+ dict(link=('vd_kpt9', 'vd_kpt10'), id=268, color=[128, 64, 255]),
+ 269:
+ dict(link=('vd_kpt10', 'vd_kpt11'), id=269, color=[128, 64, 255]),
+ 270:
+ dict(link=('vd_kpt11', 'vd_kpt12'), id=270, color=[128, 64, 255]),
+ 271:
+ dict(link=('vd_kpt12', 'vd_kpt13'), id=271, color=[128, 64, 255]),
+ 272:
+ dict(link=('vd_kpt13', 'vd_kpt14'), id=272, color=[128, 64, 255]),
+ 273:
+ dict(link=('vd_kpt14', 'vd_kpt15'), id=273, color=[128, 64, 255]),
+ 274:
+ dict(link=('vd_kpt15', 'vd_kpt16'), id=274, color=[128, 64, 255]),
+ 275:
+ dict(link=('vd_kpt16', 'vd_kpt17'), id=275, color=[128, 64, 255]),
+ 276:
+ dict(link=('vd_kpt17', 'vd_kpt18'), id=276, color=[128, 64, 255]),
+ 277:
+ dict(link=('vd_kpt18', 'vd_kpt19'), id=277, color=[128, 64, 255]),
+ 278:
+ dict(link=('vd_kpt19', 'vd_kpt6'), id=278, color=[128, 64, 255]),
+ 279:
+ dict(link=('vd_kpt6', 'vd_kpt5'), id=279, color=[128, 64, 255]),
+ 280:
+ dict(link=('vd_kpt5', 'vd_kpt4'), id=280, color=[128, 64, 255]),
+ 281:
+ dict(link=('vd_kpt4', 'vd_kpt3'), id=281, color=[128, 64, 255]),
+ 282:
+ dict(link=('vd_kpt3', 'vd_kpt2'), id=282, color=[128, 64, 255]),
+ 283:
+ dict(link=('vd_kpt6', 'vd_kpt1'), id=283, color=[128, 64, 255]),
+ # sling_dress
+ 284:
+ dict(link=('sd_kpt1', 'sd_kpt2'), id=284, color=[128, 64, 0]),
+ 285:
+ dict(link=('sd_kpt2', 'sd_kpt8'), id=285, color=[128, 64, 0]),
+ 286:
+ dict(link=('sd_kpt8', 'sd_kpt9'), id=286, color=[128, 64, 0]),
+ 287:
+ dict(link=('sd_kpt9', 'sd_kpt10'), id=287, color=[128, 64, 0]),
+ 288:
+ dict(link=('sd_kpt10', 'sd_kpt11'), id=288, color=[128, 64, 0]),
+ 289:
+ dict(link=('sd_kpt11', 'sd_kpt12'), id=289, color=[128, 64, 0]),
+ 290:
+ dict(link=('sd_kpt12', 'sd_kpt13'), id=290, color=[128, 64, 0]),
+ 291:
+ dict(link=('sd_kpt13', 'sd_kpt14'), id=291, color=[128, 64, 0]),
+ 292:
+ dict(link=('sd_kpt14', 'sd_kpt15'), id=292, color=[128, 64, 0]),
+ 293:
+ dict(link=('sd_kpt15', 'sd_kpt16'), id=293, color=[128, 64, 0]),
+ 294:
+ dict(link=('sd_kpt16', 'sd_kpt17'), id=294, color=[128, 64, 0]),
+ 295:
+ dict(link=('sd_kpt17', 'sd_kpt18'), id=295, color=[128, 64, 0]),
+ 296:
+ dict(link=('sd_kpt18', 'sd_kpt6'), id=296, color=[128, 64, 0]),
+ 297:
+ dict(link=('sd_kpt6', 'sd_kpt5'), id=297, color=[128, 64, 0]),
+ 298:
+ dict(link=('sd_kpt5', 'sd_kpt4'), id=298, color=[128, 64, 0]),
+ 299:
+ dict(link=('sd_kpt4', 'sd_kpt3'), id=299, color=[128, 64, 0]),
+ 300:
+ dict(link=('sd_kpt3', 'sd_kpt2'), id=300, color=[128, 64, 0]),
+ 301:
+ dict(link=('sd_kpt2', 'sd_kpt7'), id=301, color=[128, 64, 0]),
+ 302:
+ dict(link=('sd_kpt6', 'sd_kpt19'), id=302, color=[128, 64, 0]),
+ 303:
+ dict(link=('sd_kpt6', 'sd_kpt1'), id=303, color=[128, 64, 0]),
+ },
+ joint_weights=[1.] * 294,
+ sigmas=[])
diff --git a/configs/_base_/datasets/deepfashion_full.py b/configs/_base_/datasets/deepfashion_full.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d989069ee7253d3a5b5f01c81135b1a472cd4b2
--- /dev/null
+++ b/configs/_base_/datasets/deepfashion_full.py
@@ -0,0 +1,74 @@
+dataset_info = dict(
+ dataset_name='deepfashion_full',
+ paper_info=dict(
+ author='Liu, Ziwei and Luo, Ping and Qiu, Shi '
+ 'and Wang, Xiaogang and Tang, Xiaoou',
+ title='DeepFashion: Powering Robust Clothes Recognition '
+ 'and Retrieval with Rich Annotations',
+ container='Proceedings of IEEE Conference on Computer '
+ 'Vision and Pattern Recognition (CVPR)',
+ year='2016',
+ homepage='http://mmlab.ie.cuhk.edu.hk/projects/'
+ 'DeepFashion/LandmarkDetection.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left collar',
+ id=0,
+ color=[255, 255, 255],
+ type='',
+ swap='right collar'),
+ 1:
+ dict(
+ name='right collar',
+ id=1,
+ color=[255, 255, 255],
+ type='',
+ swap='left collar'),
+ 2:
+ dict(
+ name='left sleeve',
+ id=2,
+ color=[255, 255, 255],
+ type='',
+ swap='right sleeve'),
+ 3:
+ dict(
+ name='right sleeve',
+ id=3,
+ color=[255, 255, 255],
+ type='',
+ swap='left sleeve'),
+ 4:
+ dict(
+ name='left waistline',
+ id=0,
+ color=[255, 255, 255],
+ type='',
+ swap='right waistline'),
+ 5:
+ dict(
+ name='right waistline',
+ id=1,
+ color=[255, 255, 255],
+ type='',
+ swap='left waistline'),
+ 6:
+ dict(
+ name='left hem',
+ id=2,
+ color=[255, 255, 255],
+ type='',
+ swap='right hem'),
+ 7:
+ dict(
+ name='right hem',
+ id=3,
+ color=[255, 255, 255],
+ type='',
+ swap='left hem'),
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 8,
+ sigmas=[])
diff --git a/configs/_base_/datasets/deepfashion_lower.py b/configs/_base_/datasets/deepfashion_lower.py
new file mode 100644
index 0000000000000000000000000000000000000000..db014a1747ca618f93a7d092d29027015b48ae3c
--- /dev/null
+++ b/configs/_base_/datasets/deepfashion_lower.py
@@ -0,0 +1,46 @@
+dataset_info = dict(
+ dataset_name='deepfashion_lower',
+ paper_info=dict(
+ author='Liu, Ziwei and Luo, Ping and Qiu, Shi '
+ 'and Wang, Xiaogang and Tang, Xiaoou',
+ title='DeepFashion: Powering Robust Clothes Recognition '
+ 'and Retrieval with Rich Annotations',
+ container='Proceedings of IEEE Conference on Computer '
+ 'Vision and Pattern Recognition (CVPR)',
+ year='2016',
+ homepage='http://mmlab.ie.cuhk.edu.hk/projects/'
+ 'DeepFashion/LandmarkDetection.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left waistline',
+ id=0,
+ color=[255, 255, 255],
+ type='',
+ swap='right waistline'),
+ 1:
+ dict(
+ name='right waistline',
+ id=1,
+ color=[255, 255, 255],
+ type='',
+ swap='left waistline'),
+ 2:
+ dict(
+ name='left hem',
+ id=2,
+ color=[255, 255, 255],
+ type='',
+ swap='right hem'),
+ 3:
+ dict(
+ name='right hem',
+ id=3,
+ color=[255, 255, 255],
+ type='',
+ swap='left hem'),
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 4,
+ sigmas=[])
diff --git a/configs/_base_/datasets/deepfashion_upper.py b/configs/_base_/datasets/deepfashion_upper.py
new file mode 100644
index 0000000000000000000000000000000000000000..f0b012fd37bee1ba5ed956a7a5465a8623bf0894
--- /dev/null
+++ b/configs/_base_/datasets/deepfashion_upper.py
@@ -0,0 +1,60 @@
+dataset_info = dict(
+ dataset_name='deepfashion_upper',
+ paper_info=dict(
+ author='Liu, Ziwei and Luo, Ping and Qiu, Shi '
+ 'and Wang, Xiaogang and Tang, Xiaoou',
+ title='DeepFashion: Powering Robust Clothes Recognition '
+ 'and Retrieval with Rich Annotations',
+ container='Proceedings of IEEE Conference on Computer '
+ 'Vision and Pattern Recognition (CVPR)',
+ year='2016',
+ homepage='http://mmlab.ie.cuhk.edu.hk/projects/'
+ 'DeepFashion/LandmarkDetection.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left collar',
+ id=0,
+ color=[255, 255, 255],
+ type='',
+ swap='right collar'),
+ 1:
+ dict(
+ name='right collar',
+ id=1,
+ color=[255, 255, 255],
+ type='',
+ swap='left collar'),
+ 2:
+ dict(
+ name='left sleeve',
+ id=2,
+ color=[255, 255, 255],
+ type='',
+ swap='right sleeve'),
+ 3:
+ dict(
+ name='right sleeve',
+ id=3,
+ color=[255, 255, 255],
+ type='',
+ swap='left sleeve'),
+ 4:
+ dict(
+ name='left hem',
+ id=4,
+ color=[255, 255, 255],
+ type='',
+ swap='right hem'),
+ 5:
+ dict(
+ name='right hem',
+ id=5,
+ color=[255, 255, 255],
+ type='',
+ swap='left hem'),
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 6,
+ sigmas=[])
diff --git a/configs/_base_/datasets/exlpose.py b/configs/_base_/datasets/exlpose.py
new file mode 100644
index 0000000000000000000000000000000000000000..29b758aa21117bb71766373d3eabc8633b372354
--- /dev/null
+++ b/configs/_base_/datasets/exlpose.py
@@ -0,0 +1,125 @@
+dataset_info = dict(
+ dataset_name='exlpose',
+ paper_info=dict(
+ author='Sohyun Lee, Jaesung Rim, Boseung Jeong, Geonu Kim,'
+ 'ByungJu Woo, Haechan Lee, Sunghyun Cho, Suha Kwak',
+ title='Human Pose Estimation in Extremely Low-Light Conditions',
+ container='arXiv',
+ year='2023',
+ homepage='https://arxiv.org/abs/2303.15410',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left_shoulder',
+ id=0,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 1:
+ dict(
+ name='right_shoulder',
+ id=1,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 2:
+ dict(
+ name='left_elbow',
+ id=2,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='left_wrist',
+ id=4,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 5:
+ dict(
+ name='right_wrist',
+ id=5,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 6:
+ dict(
+ name='left_hip',
+ id=6,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 7:
+ dict(
+ name='right_hip',
+ id=7,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 8:
+ dict(
+ name='left_knee',
+ id=8,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='left_ankle',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 11:
+ dict(
+ name='right_ankle',
+ id=11,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 12:
+ dict(name='head', id=12, color=[51, 153, 255], type='upper', swap=''),
+ 13:
+ dict(name='neck', id=13, color=[51, 153, 255], type='upper', swap='')
+ },
+ skeleton_info={
+ 0: dict(link=('head', 'neck'), id=0, color=[51, 153, 255]),
+ 1: dict(link=('neck', 'left_shoulder'), id=1, color=[51, 153, 255]),
+ 2: dict(link=('neck', 'right_shoulder'), id=2, color=[51, 153, 255]),
+ 3: dict(link=('left_shoulder', 'left_elbow'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('left_elbow', 'left_wrist'), id=4, color=[0, 255, 0]),
+ 5: dict(
+ link=('right_shoulder', 'right_elbow'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(link=('right_elbow', 'right_wrist'), id=6, color=[255, 128, 0]),
+ 7: dict(link=('neck', 'right_hip'), id=7, color=[51, 153, 255]),
+ 8: dict(link=('neck', 'left_hip'), id=8, color=[51, 153, 255]),
+ 9: dict(link=('right_hip', 'right_knee'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('right_knee', 'right_ankle'), id=10, color=[255, 128, 0]),
+ 11: dict(link=('left_hip', 'left_knee'), id=11, color=[0, 255, 0]),
+ 12: dict(link=('left_knee', 'left_ankle'), id=12, color=[0, 255, 0]),
+ },
+ joint_weights=[
+ 0.2, 0.2, 0.2, 1.3, 1.5, 0.2, 1.3, 1.5, 0.2, 0.2, 0.5, 0.2, 0.2, 0.5
+ ],
+ sigmas=[
+ 0.079, 0.079, 0.072, 0.072, 0.062, 0.062, 0.107, 0.107, 0.087, 0.087,
+ 0.089, 0.089, 0.079, 0.079
+ ])
diff --git a/configs/_base_/datasets/fly.py b/configs/_base_/datasets/fly.py
new file mode 100644
index 0000000000000000000000000000000000000000..5f94ff57ca93d8f562b6a61b9a67198abdcde217
--- /dev/null
+++ b/configs/_base_/datasets/fly.py
@@ -0,0 +1,237 @@
+dataset_info = dict(
+ dataset_name='fly',
+ paper_info=dict(
+ author='Pereira, Talmo D and Aldarondo, Diego E and '
+ 'Willmore, Lindsay and Kislin, Mikhail and '
+ 'Wang, Samuel S-H and Murthy, Mala and Shaevitz, Joshua W',
+ title='Fast animal pose estimation using deep neural networks',
+ container='Nature methods',
+ year='2019',
+ homepage='https://github.com/jgraving/DeepPoseKit-Data',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='head', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='eyeL', id=1, color=[255, 255, 255], type='', swap='eyeR'),
+ 2:
+ dict(name='eyeR', id=2, color=[255, 255, 255], type='', swap='eyeL'),
+ 3:
+ dict(name='neck', id=3, color=[255, 255, 255], type='', swap=''),
+ 4:
+ dict(name='thorax', id=4, color=[255, 255, 255], type='', swap=''),
+ 5:
+ dict(name='abdomen', id=5, color=[255, 255, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forelegR1',
+ id=6,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL1'),
+ 7:
+ dict(
+ name='forelegR2',
+ id=7,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL2'),
+ 8:
+ dict(
+ name='forelegR3',
+ id=8,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL3'),
+ 9:
+ dict(
+ name='forelegR4',
+ id=9,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL4'),
+ 10:
+ dict(
+ name='midlegR1',
+ id=10,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL1'),
+ 11:
+ dict(
+ name='midlegR2',
+ id=11,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL2'),
+ 12:
+ dict(
+ name='midlegR3',
+ id=12,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL3'),
+ 13:
+ dict(
+ name='midlegR4',
+ id=13,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL4'),
+ 14:
+ dict(
+ name='hindlegR1',
+ id=14,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL1'),
+ 15:
+ dict(
+ name='hindlegR2',
+ id=15,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL2'),
+ 16:
+ dict(
+ name='hindlegR3',
+ id=16,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL3'),
+ 17:
+ dict(
+ name='hindlegR4',
+ id=17,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL4'),
+ 18:
+ dict(
+ name='forelegL1',
+ id=18,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR1'),
+ 19:
+ dict(
+ name='forelegL2',
+ id=19,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR2'),
+ 20:
+ dict(
+ name='forelegL3',
+ id=20,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR3'),
+ 21:
+ dict(
+ name='forelegL4',
+ id=21,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR4'),
+ 22:
+ dict(
+ name='midlegL1',
+ id=22,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR1'),
+ 23:
+ dict(
+ name='midlegL2',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR2'),
+ 24:
+ dict(
+ name='midlegL3',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR3'),
+ 25:
+ dict(
+ name='midlegL4',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR4'),
+ 26:
+ dict(
+ name='hindlegL1',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR1'),
+ 27:
+ dict(
+ name='hindlegL2',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR2'),
+ 28:
+ dict(
+ name='hindlegL3',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR3'),
+ 29:
+ dict(
+ name='hindlegL4',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR4'),
+ 30:
+ dict(
+ name='wingL', id=30, color=[255, 255, 255], type='', swap='wingR'),
+ 31:
+ dict(
+ name='wingR', id=31, color=[255, 255, 255], type='', swap='wingL'),
+ },
+ skeleton_info={
+ 0: dict(link=('eyeL', 'head'), id=0, color=[255, 255, 255]),
+ 1: dict(link=('eyeR', 'head'), id=1, color=[255, 255, 255]),
+ 2: dict(link=('neck', 'head'), id=2, color=[255, 255, 255]),
+ 3: dict(link=('thorax', 'neck'), id=3, color=[255, 255, 255]),
+ 4: dict(link=('abdomen', 'thorax'), id=4, color=[255, 255, 255]),
+ 5: dict(link=('forelegR2', 'forelegR1'), id=5, color=[255, 255, 255]),
+ 6: dict(link=('forelegR3', 'forelegR2'), id=6, color=[255, 255, 255]),
+ 7: dict(link=('forelegR4', 'forelegR3'), id=7, color=[255, 255, 255]),
+ 8: dict(link=('midlegR2', 'midlegR1'), id=8, color=[255, 255, 255]),
+ 9: dict(link=('midlegR3', 'midlegR2'), id=9, color=[255, 255, 255]),
+ 10: dict(link=('midlegR4', 'midlegR3'), id=10, color=[255, 255, 255]),
+ 11:
+ dict(link=('hindlegR2', 'hindlegR1'), id=11, color=[255, 255, 255]),
+ 12:
+ dict(link=('hindlegR3', 'hindlegR2'), id=12, color=[255, 255, 255]),
+ 13:
+ dict(link=('hindlegR4', 'hindlegR3'), id=13, color=[255, 255, 255]),
+ 14:
+ dict(link=('forelegL2', 'forelegL1'), id=14, color=[255, 255, 255]),
+ 15:
+ dict(link=('forelegL3', 'forelegL2'), id=15, color=[255, 255, 255]),
+ 16:
+ dict(link=('forelegL4', 'forelegL3'), id=16, color=[255, 255, 255]),
+ 17: dict(link=('midlegL2', 'midlegL1'), id=17, color=[255, 255, 255]),
+ 18: dict(link=('midlegL3', 'midlegL2'), id=18, color=[255, 255, 255]),
+ 19: dict(link=('midlegL4', 'midlegL3'), id=19, color=[255, 255, 255]),
+ 20:
+ dict(link=('hindlegL2', 'hindlegL1'), id=20, color=[255, 255, 255]),
+ 21:
+ dict(link=('hindlegL3', 'hindlegL2'), id=21, color=[255, 255, 255]),
+ 22:
+ dict(link=('hindlegL4', 'hindlegL3'), id=22, color=[255, 255, 255]),
+ 23: dict(link=('wingL', 'neck'), id=23, color=[255, 255, 255]),
+ 24: dict(link=('wingR', 'neck'), id=24, color=[255, 255, 255])
+ },
+ joint_weights=[1.] * 32,
+ sigmas=[])
diff --git a/configs/_base_/datasets/freihand2d.py b/configs/_base_/datasets/freihand2d.py
new file mode 100644
index 0000000000000000000000000000000000000000..8b960d10f3538801531dbccdd67aeac6e73ac572
--- /dev/null
+++ b/configs/_base_/datasets/freihand2d.py
@@ -0,0 +1,144 @@
+dataset_info = dict(
+ dataset_name='freihand',
+ paper_info=dict(
+ author='Zimmermann, Christian and Ceylan, Duygu and '
+ 'Yang, Jimei and Russell, Bryan and '
+ 'Argus, Max and Brox, Thomas',
+ title='Freihand: A dataset for markerless capture of hand pose '
+ 'and shape from single rgb images',
+ container='Proceedings of the IEEE International '
+ 'Conference on Computer Vision',
+ year='2019',
+ homepage='https://lmb.informatik.uni-freiburg.de/projects/freihand/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='wrist', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='thumb1', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb2', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb3', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(name='thumb4', id=4, color=[255, 128, 0], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger1', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger2', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger3', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='forefinger4', id=8, color=[255, 153, 255], type='', swap=''),
+ 9:
+ dict(
+ name='middle_finger1',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger3',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='middle_finger4',
+ id=12,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 13:
+ dict(
+ name='ring_finger1', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger2', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger3', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(
+ name='ring_finger4', id=16, color=[255, 51, 51], type='', swap=''),
+ 17:
+ dict(name='pinky_finger1', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger2', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger3', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='pinky_finger4', id=20, color=[0, 255, 0], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[])
diff --git a/configs/_base_/datasets/h36m.py b/configs/_base_/datasets/h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..00a719d8b19f9ff3c5ef98476d73216055bf9186
--- /dev/null
+++ b/configs/_base_/datasets/h36m.py
@@ -0,0 +1,152 @@
+dataset_info = dict(
+ dataset_name='h36m',
+ paper_info=dict(
+ author='Ionescu, Catalin and Papava, Dragos and '
+ 'Olaru, Vlad and Sminchisescu, Cristian',
+ title='Human3.6M: Large Scale Datasets and Predictive '
+ 'Methods for 3D Human Sensing in Natural Environments',
+ container='IEEE Transactions on Pattern Analysis and '
+ 'Machine Intelligence',
+ year='2014',
+ homepage='http://vision.imar.ro/human3.6m/description.php',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='root', id=0, color=[51, 153, 255], type='lower', swap=''),
+ 1:
+ dict(
+ name='right_hip',
+ id=1,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 2:
+ dict(
+ name='right_knee',
+ id=2,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 3:
+ dict(
+ name='right_foot',
+ id=3,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_foot'),
+ 4:
+ dict(
+ name='left_hip',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 5:
+ dict(
+ name='left_knee',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 6:
+ dict(
+ name='left_foot',
+ id=6,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_foot'),
+ 7:
+ dict(name='spine', id=7, color=[51, 153, 255], type='upper', swap=''),
+ 8:
+ dict(name='thorax', id=8, color=[51, 153, 255], type='upper', swap=''),
+ 9:
+ dict(
+ name='neck_base',
+ id=9,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 10:
+ dict(name='head', id=10, color=[51, 153, 255], type='upper', swap=''),
+ 11:
+ dict(
+ name='left_shoulder',
+ id=11,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 12:
+ dict(
+ name='left_elbow',
+ id=12,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 13:
+ dict(
+ name='left_wrist',
+ id=13,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 14:
+ dict(
+ name='right_shoulder',
+ id=14,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 15:
+ dict(
+ name='right_elbow',
+ id=15,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 16:
+ dict(
+ name='right_wrist',
+ id=16,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('root', 'left_hip'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_hip', 'left_knee'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('left_knee', 'left_foot'), id=2, color=[0, 255, 0]),
+ 3:
+ dict(link=('root', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('right_hip', 'right_knee'), id=4, color=[255, 128, 0]),
+ 5:
+ dict(link=('right_knee', 'right_foot'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(link=('root', 'spine'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(link=('spine', 'thorax'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('thorax', 'neck_base'), id=8, color=[51, 153, 255]),
+ 9:
+ dict(link=('neck_base', 'head'), id=9, color=[51, 153, 255]),
+ 10:
+ dict(link=('thorax', 'left_shoulder'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('left_shoulder', 'left_elbow'), id=11, color=[0, 255, 0]),
+ 12:
+ dict(link=('left_elbow', 'left_wrist'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('thorax', 'right_shoulder'), id=13, color=[255, 128, 0]),
+ 14:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=14, color=[255, 128,
+ 0]),
+ 15:
+ dict(link=('right_elbow', 'right_wrist'), id=15, color=[255, 128, 0])
+ },
+ joint_weights=[1.] * 17,
+ sigmas=[],
+ stats_info=dict(bbox_center=(528., 427.), bbox_scale=400.))
diff --git a/configs/_base_/datasets/h3wb.py b/configs/_base_/datasets/h3wb.py
new file mode 100644
index 0000000000000000000000000000000000000000..bb47a1b3f5809d7b2c6429e0c8520f7141e4ca3d
--- /dev/null
+++ b/configs/_base_/datasets/h3wb.py
@@ -0,0 +1,1151 @@
+dataset_info = dict(
+ dataset_name='h3wb',
+ paper_info=dict(
+ author='Yue Zhu, Nermin Samet, David Picard',
+ title='H3WB: Human3.6M 3D WholeBody Dataset and Benchmark',
+ container='International Conf. on Computer Vision (ICCV)',
+ year='2023',
+ homepage='https://github.com/wholebody3d/wholebody3d',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='left_big_toe',
+ id=17,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 18:
+ dict(
+ name='left_small_toe',
+ id=18,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 19:
+ dict(
+ name='left_heel',
+ id=19,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_heel'),
+ 20:
+ dict(
+ name='right_big_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 21:
+ dict(
+ name='right_small_toe',
+ id=21,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 22:
+ dict(
+ name='right_heel',
+ id=22,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_heel'),
+ 23:
+ dict(
+ name='face-0',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='face-16'),
+ 24:
+ dict(
+ name='face-1',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='face-15'),
+ 25:
+ dict(
+ name='face-2',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='face-14'),
+ 26:
+ dict(
+ name='face-3',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='face-13'),
+ 27:
+ dict(
+ name='face-4',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='face-12'),
+ 28:
+ dict(
+ name='face-5',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='face-11'),
+ 29:
+ dict(
+ name='face-6',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='face-10'),
+ 30:
+ dict(
+ name='face-7',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='face-9'),
+ 31:
+ dict(name='face-8', id=31, color=[255, 255, 255], type='', swap=''),
+ 32:
+ dict(
+ name='face-9',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='face-7'),
+ 33:
+ dict(
+ name='face-10',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='face-6'),
+ 34:
+ dict(
+ name='face-11',
+ id=34,
+ color=[255, 255, 255],
+ type='',
+ swap='face-5'),
+ 35:
+ dict(
+ name='face-12',
+ id=35,
+ color=[255, 255, 255],
+ type='',
+ swap='face-4'),
+ 36:
+ dict(
+ name='face-13',
+ id=36,
+ color=[255, 255, 255],
+ type='',
+ swap='face-3'),
+ 37:
+ dict(
+ name='face-14',
+ id=37,
+ color=[255, 255, 255],
+ type='',
+ swap='face-2'),
+ 38:
+ dict(
+ name='face-15',
+ id=38,
+ color=[255, 255, 255],
+ type='',
+ swap='face-1'),
+ 39:
+ dict(
+ name='face-16',
+ id=39,
+ color=[255, 255, 255],
+ type='',
+ swap='face-0'),
+ 40:
+ dict(
+ name='face-17',
+ id=40,
+ color=[255, 255, 255],
+ type='',
+ swap='face-26'),
+ 41:
+ dict(
+ name='face-18',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='face-25'),
+ 42:
+ dict(
+ name='face-19',
+ id=42,
+ color=[255, 255, 255],
+ type='',
+ swap='face-24'),
+ 43:
+ dict(
+ name='face-20',
+ id=43,
+ color=[255, 255, 255],
+ type='',
+ swap='face-23'),
+ 44:
+ dict(
+ name='face-21',
+ id=44,
+ color=[255, 255, 255],
+ type='',
+ swap='face-22'),
+ 45:
+ dict(
+ name='face-22',
+ id=45,
+ color=[255, 255, 255],
+ type='',
+ swap='face-21'),
+ 46:
+ dict(
+ name='face-23',
+ id=46,
+ color=[255, 255, 255],
+ type='',
+ swap='face-20'),
+ 47:
+ dict(
+ name='face-24',
+ id=47,
+ color=[255, 255, 255],
+ type='',
+ swap='face-19'),
+ 48:
+ dict(
+ name='face-25',
+ id=48,
+ color=[255, 255, 255],
+ type='',
+ swap='face-18'),
+ 49:
+ dict(
+ name='face-26',
+ id=49,
+ color=[255, 255, 255],
+ type='',
+ swap='face-17'),
+ 50:
+ dict(name='face-27', id=50, color=[255, 255, 255], type='', swap=''),
+ 51:
+ dict(name='face-28', id=51, color=[255, 255, 255], type='', swap=''),
+ 52:
+ dict(name='face-29', id=52, color=[255, 255, 255], type='', swap=''),
+ 53:
+ dict(name='face-30', id=53, color=[255, 255, 255], type='', swap=''),
+ 54:
+ dict(
+ name='face-31',
+ id=54,
+ color=[255, 255, 255],
+ type='',
+ swap='face-35'),
+ 55:
+ dict(
+ name='face-32',
+ id=55,
+ color=[255, 255, 255],
+ type='',
+ swap='face-34'),
+ 56:
+ dict(name='face-33', id=56, color=[255, 255, 255], type='', swap=''),
+ 57:
+ dict(
+ name='face-34',
+ id=57,
+ color=[255, 255, 255],
+ type='',
+ swap='face-32'),
+ 58:
+ dict(
+ name='face-35',
+ id=58,
+ color=[255, 255, 255],
+ type='',
+ swap='face-31'),
+ 59:
+ dict(
+ name='face-36',
+ id=59,
+ color=[255, 255, 255],
+ type='',
+ swap='face-45'),
+ 60:
+ dict(
+ name='face-37',
+ id=60,
+ color=[255, 255, 255],
+ type='',
+ swap='face-44'),
+ 61:
+ dict(
+ name='face-38',
+ id=61,
+ color=[255, 255, 255],
+ type='',
+ swap='face-43'),
+ 62:
+ dict(
+ name='face-39',
+ id=62,
+ color=[255, 255, 255],
+ type='',
+ swap='face-42'),
+ 63:
+ dict(
+ name='face-40',
+ id=63,
+ color=[255, 255, 255],
+ type='',
+ swap='face-47'),
+ 64:
+ dict(
+ name='face-41',
+ id=64,
+ color=[255, 255, 255],
+ type='',
+ swap='face-46'),
+ 65:
+ dict(
+ name='face-42',
+ id=65,
+ color=[255, 255, 255],
+ type='',
+ swap='face-39'),
+ 66:
+ dict(
+ name='face-43',
+ id=66,
+ color=[255, 255, 255],
+ type='',
+ swap='face-38'),
+ 67:
+ dict(
+ name='face-44',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='face-37'),
+ 68:
+ dict(
+ name='face-45',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='face-36'),
+ 69:
+ dict(
+ name='face-46',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='face-41'),
+ 70:
+ dict(
+ name='face-47',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='face-40'),
+ 71:
+ dict(
+ name='face-48',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='face-54'),
+ 72:
+ dict(
+ name='face-49',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='face-53'),
+ 73:
+ dict(
+ name='face-50',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='face-52'),
+ 74:
+ dict(name='face-51', id=74, color=[255, 255, 255], type='', swap=''),
+ 75:
+ dict(
+ name='face-52',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='face-50'),
+ 76:
+ dict(
+ name='face-53',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='face-49'),
+ 77:
+ dict(
+ name='face-54',
+ id=77,
+ color=[255, 255, 255],
+ type='',
+ swap='face-48'),
+ 78:
+ dict(
+ name='face-55',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='face-59'),
+ 79:
+ dict(
+ name='face-56',
+ id=79,
+ color=[255, 255, 255],
+ type='',
+ swap='face-58'),
+ 80:
+ dict(name='face-57', id=80, color=[255, 255, 255], type='', swap=''),
+ 81:
+ dict(
+ name='face-58',
+ id=81,
+ color=[255, 255, 255],
+ type='',
+ swap='face-56'),
+ 82:
+ dict(
+ name='face-59',
+ id=82,
+ color=[255, 255, 255],
+ type='',
+ swap='face-55'),
+ 83:
+ dict(
+ name='face-60',
+ id=83,
+ color=[255, 255, 255],
+ type='',
+ swap='face-64'),
+ 84:
+ dict(
+ name='face-61',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='face-63'),
+ 85:
+ dict(name='face-62', id=85, color=[255, 255, 255], type='', swap=''),
+ 86:
+ dict(
+ name='face-63',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='face-61'),
+ 87:
+ dict(
+ name='face-64',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='face-60'),
+ 88:
+ dict(
+ name='face-65',
+ id=88,
+ color=[255, 255, 255],
+ type='',
+ swap='face-67'),
+ 89:
+ dict(name='face-66', id=89, color=[255, 255, 255], type='', swap=''),
+ 90:
+ dict(
+ name='face-67',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='face-65'),
+ 91:
+ dict(
+ name='left_hand_root',
+ id=91,
+ color=[255, 255, 255],
+ type='',
+ swap='right_hand_root'),
+ 92:
+ dict(
+ name='left_thumb1',
+ id=92,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb1'),
+ 93:
+ dict(
+ name='left_thumb2',
+ id=93,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb2'),
+ 94:
+ dict(
+ name='left_thumb3',
+ id=94,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb3'),
+ 95:
+ dict(
+ name='left_thumb4',
+ id=95,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb4'),
+ 96:
+ dict(
+ name='left_forefinger1',
+ id=96,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger1'),
+ 97:
+ dict(
+ name='left_forefinger2',
+ id=97,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger2'),
+ 98:
+ dict(
+ name='left_forefinger3',
+ id=98,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger3'),
+ 99:
+ dict(
+ name='left_forefinger4',
+ id=99,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger4'),
+ 100:
+ dict(
+ name='left_middle_finger1',
+ id=100,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 101:
+ dict(
+ name='left_middle_finger2',
+ id=101,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 102:
+ dict(
+ name='left_middle_finger3',
+ id=102,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 103:
+ dict(
+ name='left_middle_finger4',
+ id=103,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 104:
+ dict(
+ name='left_ring_finger1',
+ id=104,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger1'),
+ 105:
+ dict(
+ name='left_ring_finger2',
+ id=105,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger2'),
+ 106:
+ dict(
+ name='left_ring_finger3',
+ id=106,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger3'),
+ 107:
+ dict(
+ name='left_ring_finger4',
+ id=107,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger4'),
+ 108:
+ dict(
+ name='left_pinky_finger1',
+ id=108,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger1'),
+ 109:
+ dict(
+ name='left_pinky_finger2',
+ id=109,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger2'),
+ 110:
+ dict(
+ name='left_pinky_finger3',
+ id=110,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger3'),
+ 111:
+ dict(
+ name='left_pinky_finger4',
+ id=111,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger4'),
+ 112:
+ dict(
+ name='right_hand_root',
+ id=112,
+ color=[255, 255, 255],
+ type='',
+ swap='left_hand_root'),
+ 113:
+ dict(
+ name='right_thumb1',
+ id=113,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb1'),
+ 114:
+ dict(
+ name='right_thumb2',
+ id=114,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb2'),
+ 115:
+ dict(
+ name='right_thumb3',
+ id=115,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb3'),
+ 116:
+ dict(
+ name='right_thumb4',
+ id=116,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb4'),
+ 117:
+ dict(
+ name='right_forefinger1',
+ id=117,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger1'),
+ 118:
+ dict(
+ name='right_forefinger2',
+ id=118,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger2'),
+ 119:
+ dict(
+ name='right_forefinger3',
+ id=119,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger3'),
+ 120:
+ dict(
+ name='right_forefinger4',
+ id=120,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger4'),
+ 121:
+ dict(
+ name='right_middle_finger1',
+ id=121,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 122:
+ dict(
+ name='right_middle_finger2',
+ id=122,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 123:
+ dict(
+ name='right_middle_finger3',
+ id=123,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 124:
+ dict(
+ name='right_middle_finger4',
+ id=124,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 125:
+ dict(
+ name='right_ring_finger1',
+ id=125,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger1'),
+ 126:
+ dict(
+ name='right_ring_finger2',
+ id=126,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger2'),
+ 127:
+ dict(
+ name='right_ring_finger3',
+ id=127,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger3'),
+ 128:
+ dict(
+ name='right_ring_finger4',
+ id=128,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger4'),
+ 129:
+ dict(
+ name='right_pinky_finger1',
+ id=129,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger1'),
+ 130:
+ dict(
+ name='right_pinky_finger2',
+ id=130,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger2'),
+ 131:
+ dict(
+ name='right_pinky_finger3',
+ id=131,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger3'),
+ 132:
+ dict(
+ name='right_pinky_finger4',
+ id=132,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger4')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ankle', 'left_big_toe'), id=19, color=[0, 255, 0]),
+ 20:
+ dict(link=('left_ankle', 'left_small_toe'), id=20, color=[0, 255, 0]),
+ 21:
+ dict(link=('left_ankle', 'left_heel'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(
+ link=('right_ankle', 'right_big_toe'), id=22, color=[255, 128, 0]),
+ 23:
+ dict(
+ link=('right_ankle', 'right_small_toe'),
+ id=23,
+ color=[255, 128, 0]),
+ 24:
+ dict(link=('right_ankle', 'right_heel'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(
+ link=('left_hand_root', 'left_thumb1'), id=25, color=[255, 128,
+ 0]),
+ 26:
+ dict(link=('left_thumb1', 'left_thumb2'), id=26, color=[255, 128, 0]),
+ 27:
+ dict(link=('left_thumb2', 'left_thumb3'), id=27, color=[255, 128, 0]),
+ 28:
+ dict(link=('left_thumb3', 'left_thumb4'), id=28, color=[255, 128, 0]),
+ 29:
+ dict(
+ link=('left_hand_root', 'left_forefinger1'),
+ id=29,
+ color=[255, 153, 255]),
+ 30:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=30,
+ color=[255, 153, 255]),
+ 31:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=31,
+ color=[255, 153, 255]),
+ 32:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=32,
+ color=[255, 153, 255]),
+ 33:
+ dict(
+ link=('left_hand_root', 'left_middle_finger1'),
+ id=33,
+ color=[102, 178, 255]),
+ 34:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=34,
+ color=[102, 178, 255]),
+ 35:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=35,
+ color=[102, 178, 255]),
+ 36:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=36,
+ color=[102, 178, 255]),
+ 37:
+ dict(
+ link=('left_hand_root', 'left_ring_finger1'),
+ id=37,
+ color=[255, 51, 51]),
+ 38:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=38,
+ color=[255, 51, 51]),
+ 39:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=39,
+ color=[255, 51, 51]),
+ 40:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=40,
+ color=[255, 51, 51]),
+ 41:
+ dict(
+ link=('left_hand_root', 'left_pinky_finger1'),
+ id=41,
+ color=[0, 255, 0]),
+ 42:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=42,
+ color=[0, 255, 0]),
+ 43:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=43,
+ color=[0, 255, 0]),
+ 44:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=44,
+ color=[0, 255, 0]),
+ 45:
+ dict(
+ link=('right_hand_root', 'right_thumb1'),
+ id=45,
+ color=[255, 128, 0]),
+ 46:
+ dict(
+ link=('right_thumb1', 'right_thumb2'), id=46, color=[255, 128, 0]),
+ 47:
+ dict(
+ link=('right_thumb2', 'right_thumb3'), id=47, color=[255, 128, 0]),
+ 48:
+ dict(
+ link=('right_thumb3', 'right_thumb4'), id=48, color=[255, 128, 0]),
+ 49:
+ dict(
+ link=('right_hand_root', 'right_forefinger1'),
+ id=49,
+ color=[255, 153, 255]),
+ 50:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=50,
+ color=[255, 153, 255]),
+ 51:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=51,
+ color=[255, 153, 255]),
+ 52:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=52,
+ color=[255, 153, 255]),
+ 53:
+ dict(
+ link=('right_hand_root', 'right_middle_finger1'),
+ id=53,
+ color=[102, 178, 255]),
+ 54:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=54,
+ color=[102, 178, 255]),
+ 55:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=55,
+ color=[102, 178, 255]),
+ 56:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=56,
+ color=[102, 178, 255]),
+ 57:
+ dict(
+ link=('right_hand_root', 'right_ring_finger1'),
+ id=57,
+ color=[255, 51, 51]),
+ 58:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=58,
+ color=[255, 51, 51]),
+ 59:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=59,
+ color=[255, 51, 51]),
+ 60:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=60,
+ color=[255, 51, 51]),
+ 61:
+ dict(
+ link=('right_hand_root', 'right_pinky_finger1'),
+ id=61,
+ color=[0, 255, 0]),
+ 62:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=62,
+ color=[0, 255, 0]),
+ 63:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=63,
+ color=[0, 255, 0]),
+ 64:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=64,
+ color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 133,
+ # 'https://github.com/jin-s13/COCO-WholeBody/blob/master/'
+ # 'evaluation/myeval_wholebody.py#L175'
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.068, 0.066, 0.066,
+ 0.092, 0.094, 0.094, 0.042, 0.043, 0.044, 0.043, 0.040, 0.035, 0.031,
+ 0.025, 0.020, 0.023, 0.029, 0.032, 0.037, 0.038, 0.043, 0.041, 0.045,
+ 0.013, 0.012, 0.011, 0.011, 0.012, 0.012, 0.011, 0.011, 0.013, 0.015,
+ 0.009, 0.007, 0.007, 0.007, 0.012, 0.009, 0.008, 0.016, 0.010, 0.017,
+ 0.011, 0.009, 0.011, 0.009, 0.007, 0.013, 0.008, 0.011, 0.012, 0.010,
+ 0.034, 0.008, 0.008, 0.009, 0.008, 0.008, 0.007, 0.010, 0.008, 0.009,
+ 0.009, 0.009, 0.007, 0.007, 0.008, 0.011, 0.008, 0.008, 0.008, 0.01,
+ 0.008, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024, 0.035,
+ 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02, 0.019,
+ 0.022, 0.031, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024,
+ 0.035, 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02,
+ 0.019, 0.022, 0.031
+ ])
diff --git a/configs/_base_/datasets/halpe.py b/configs/_base_/datasets/halpe.py
new file mode 100644
index 0000000000000000000000000000000000000000..1385fe81dc2190684f2142449c0f288f2cb74c1a
--- /dev/null
+++ b/configs/_base_/datasets/halpe.py
@@ -0,0 +1,1157 @@
+dataset_info = dict(
+ dataset_name='halpe',
+ paper_info=dict(
+ author='Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie'
+ ' and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu'
+ ' and Ma, Ze and Chen, Mingyang and Lu, Cewu',
+ title='PaStaNet: Toward Human Activity Knowledge Engine',
+ container='CVPR',
+ year='2020',
+ homepage='https://github.com/Fang-Haoshu/Halpe-FullBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(name='head', id=17, color=[255, 128, 0], type='upper', swap=''),
+ 18:
+ dict(name='neck', id=18, color=[255, 128, 0], type='upper', swap=''),
+ 19:
+ dict(name='hip', id=19, color=[255, 128, 0], type='lower', swap=''),
+ 20:
+ dict(
+ name='left_big_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 21:
+ dict(
+ name='right_big_toe',
+ id=21,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 22:
+ dict(
+ name='left_small_toe',
+ id=22,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 23:
+ dict(
+ name='right_small_toe',
+ id=23,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 24:
+ dict(
+ name='left_heel',
+ id=24,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_heel'),
+ 25:
+ dict(
+ name='right_heel',
+ id=25,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_heel'),
+ 26:
+ dict(
+ name='face-0',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='face-16'),
+ 27:
+ dict(
+ name='face-1',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='face-15'),
+ 28:
+ dict(
+ name='face-2',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='face-14'),
+ 29:
+ dict(
+ name='face-3',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='face-13'),
+ 30:
+ dict(
+ name='face-4',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='face-12'),
+ 31:
+ dict(
+ name='face-5',
+ id=31,
+ color=[255, 255, 255],
+ type='',
+ swap='face-11'),
+ 32:
+ dict(
+ name='face-6',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='face-10'),
+ 33:
+ dict(
+ name='face-7',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='face-9'),
+ 34:
+ dict(name='face-8', id=34, color=[255, 255, 255], type='', swap=''),
+ 35:
+ dict(
+ name='face-9',
+ id=35,
+ color=[255, 255, 255],
+ type='',
+ swap='face-7'),
+ 36:
+ dict(
+ name='face-10',
+ id=36,
+ color=[255, 255, 255],
+ type='',
+ swap='face-6'),
+ 37:
+ dict(
+ name='face-11',
+ id=37,
+ color=[255, 255, 255],
+ type='',
+ swap='face-5'),
+ 38:
+ dict(
+ name='face-12',
+ id=38,
+ color=[255, 255, 255],
+ type='',
+ swap='face-4'),
+ 39:
+ dict(
+ name='face-13',
+ id=39,
+ color=[255, 255, 255],
+ type='',
+ swap='face-3'),
+ 40:
+ dict(
+ name='face-14',
+ id=40,
+ color=[255, 255, 255],
+ type='',
+ swap='face-2'),
+ 41:
+ dict(
+ name='face-15',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='face-1'),
+ 42:
+ dict(
+ name='face-16',
+ id=42,
+ color=[255, 255, 255],
+ type='',
+ swap='face-0'),
+ 43:
+ dict(
+ name='face-17',
+ id=43,
+ color=[255, 255, 255],
+ type='',
+ swap='face-26'),
+ 44:
+ dict(
+ name='face-18',
+ id=44,
+ color=[255, 255, 255],
+ type='',
+ swap='face-25'),
+ 45:
+ dict(
+ name='face-19',
+ id=45,
+ color=[255, 255, 255],
+ type='',
+ swap='face-24'),
+ 46:
+ dict(
+ name='face-20',
+ id=46,
+ color=[255, 255, 255],
+ type='',
+ swap='face-23'),
+ 47:
+ dict(
+ name='face-21',
+ id=47,
+ color=[255, 255, 255],
+ type='',
+ swap='face-22'),
+ 48:
+ dict(
+ name='face-22',
+ id=48,
+ color=[255, 255, 255],
+ type='',
+ swap='face-21'),
+ 49:
+ dict(
+ name='face-23',
+ id=49,
+ color=[255, 255, 255],
+ type='',
+ swap='face-20'),
+ 50:
+ dict(
+ name='face-24',
+ id=50,
+ color=[255, 255, 255],
+ type='',
+ swap='face-19'),
+ 51:
+ dict(
+ name='face-25',
+ id=51,
+ color=[255, 255, 255],
+ type='',
+ swap='face-18'),
+ 52:
+ dict(
+ name='face-26',
+ id=52,
+ color=[255, 255, 255],
+ type='',
+ swap='face-17'),
+ 53:
+ dict(name='face-27', id=53, color=[255, 255, 255], type='', swap=''),
+ 54:
+ dict(name='face-28', id=54, color=[255, 255, 255], type='', swap=''),
+ 55:
+ dict(name='face-29', id=55, color=[255, 255, 255], type='', swap=''),
+ 56:
+ dict(name='face-30', id=56, color=[255, 255, 255], type='', swap=''),
+ 57:
+ dict(
+ name='face-31',
+ id=57,
+ color=[255, 255, 255],
+ type='',
+ swap='face-35'),
+ 58:
+ dict(
+ name='face-32',
+ id=58,
+ color=[255, 255, 255],
+ type='',
+ swap='face-34'),
+ 59:
+ dict(name='face-33', id=59, color=[255, 255, 255], type='', swap=''),
+ 60:
+ dict(
+ name='face-34',
+ id=60,
+ color=[255, 255, 255],
+ type='',
+ swap='face-32'),
+ 61:
+ dict(
+ name='face-35',
+ id=61,
+ color=[255, 255, 255],
+ type='',
+ swap='face-31'),
+ 62:
+ dict(
+ name='face-36',
+ id=62,
+ color=[255, 255, 255],
+ type='',
+ swap='face-45'),
+ 63:
+ dict(
+ name='face-37',
+ id=63,
+ color=[255, 255, 255],
+ type='',
+ swap='face-44'),
+ 64:
+ dict(
+ name='face-38',
+ id=64,
+ color=[255, 255, 255],
+ type='',
+ swap='face-43'),
+ 65:
+ dict(
+ name='face-39',
+ id=65,
+ color=[255, 255, 255],
+ type='',
+ swap='face-42'),
+ 66:
+ dict(
+ name='face-40',
+ id=66,
+ color=[255, 255, 255],
+ type='',
+ swap='face-47'),
+ 67:
+ dict(
+ name='face-41',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='face-46'),
+ 68:
+ dict(
+ name='face-42',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='face-39'),
+ 69:
+ dict(
+ name='face-43',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='face-38'),
+ 70:
+ dict(
+ name='face-44',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='face-37'),
+ 71:
+ dict(
+ name='face-45',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='face-36'),
+ 72:
+ dict(
+ name='face-46',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='face-41'),
+ 73:
+ dict(
+ name='face-47',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='face-40'),
+ 74:
+ dict(
+ name='face-48',
+ id=74,
+ color=[255, 255, 255],
+ type='',
+ swap='face-54'),
+ 75:
+ dict(
+ name='face-49',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='face-53'),
+ 76:
+ dict(
+ name='face-50',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='face-52'),
+ 77:
+ dict(name='face-51', id=77, color=[255, 255, 255], type='', swap=''),
+ 78:
+ dict(
+ name='face-52',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='face-50'),
+ 79:
+ dict(
+ name='face-53',
+ id=79,
+ color=[255, 255, 255],
+ type='',
+ swap='face-49'),
+ 80:
+ dict(
+ name='face-54',
+ id=80,
+ color=[255, 255, 255],
+ type='',
+ swap='face-48'),
+ 81:
+ dict(
+ name='face-55',
+ id=81,
+ color=[255, 255, 255],
+ type='',
+ swap='face-59'),
+ 82:
+ dict(
+ name='face-56',
+ id=82,
+ color=[255, 255, 255],
+ type='',
+ swap='face-58'),
+ 83:
+ dict(name='face-57', id=83, color=[255, 255, 255], type='', swap=''),
+ 84:
+ dict(
+ name='face-58',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='face-56'),
+ 85:
+ dict(
+ name='face-59',
+ id=85,
+ color=[255, 255, 255],
+ type='',
+ swap='face-55'),
+ 86:
+ dict(
+ name='face-60',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='face-64'),
+ 87:
+ dict(
+ name='face-61',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='face-63'),
+ 88:
+ dict(name='face-62', id=88, color=[255, 255, 255], type='', swap=''),
+ 89:
+ dict(
+ name='face-63',
+ id=89,
+ color=[255, 255, 255],
+ type='',
+ swap='face-61'),
+ 90:
+ dict(
+ name='face-64',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='face-60'),
+ 91:
+ dict(
+ name='face-65',
+ id=91,
+ color=[255, 255, 255],
+ type='',
+ swap='face-67'),
+ 92:
+ dict(name='face-66', id=92, color=[255, 255, 255], type='', swap=''),
+ 93:
+ dict(
+ name='face-67',
+ id=93,
+ color=[255, 255, 255],
+ type='',
+ swap='face-65'),
+ 94:
+ dict(
+ name='left_hand_root',
+ id=94,
+ color=[255, 255, 255],
+ type='',
+ swap='right_hand_root'),
+ 95:
+ dict(
+ name='left_thumb1',
+ id=95,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb1'),
+ 96:
+ dict(
+ name='left_thumb2',
+ id=96,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb2'),
+ 97:
+ dict(
+ name='left_thumb3',
+ id=97,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb3'),
+ 98:
+ dict(
+ name='left_thumb4',
+ id=98,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb4'),
+ 99:
+ dict(
+ name='left_forefinger1',
+ id=99,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger1'),
+ 100:
+ dict(
+ name='left_forefinger2',
+ id=100,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger2'),
+ 101:
+ dict(
+ name='left_forefinger3',
+ id=101,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger3'),
+ 102:
+ dict(
+ name='left_forefinger4',
+ id=102,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger4'),
+ 103:
+ dict(
+ name='left_middle_finger1',
+ id=103,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 104:
+ dict(
+ name='left_middle_finger2',
+ id=104,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 105:
+ dict(
+ name='left_middle_finger3',
+ id=105,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 106:
+ dict(
+ name='left_middle_finger4',
+ id=106,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 107:
+ dict(
+ name='left_ring_finger1',
+ id=107,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger1'),
+ 108:
+ dict(
+ name='left_ring_finger2',
+ id=108,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger2'),
+ 109:
+ dict(
+ name='left_ring_finger3',
+ id=109,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger3'),
+ 110:
+ dict(
+ name='left_ring_finger4',
+ id=110,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger4'),
+ 111:
+ dict(
+ name='left_pinky_finger1',
+ id=111,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger1'),
+ 112:
+ dict(
+ name='left_pinky_finger2',
+ id=112,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger2'),
+ 113:
+ dict(
+ name='left_pinky_finger3',
+ id=113,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger3'),
+ 114:
+ dict(
+ name='left_pinky_finger4',
+ id=114,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger4'),
+ 115:
+ dict(
+ name='right_hand_root',
+ id=115,
+ color=[255, 255, 255],
+ type='',
+ swap='left_hand_root'),
+ 116:
+ dict(
+ name='right_thumb1',
+ id=116,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb1'),
+ 117:
+ dict(
+ name='right_thumb2',
+ id=117,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb2'),
+ 118:
+ dict(
+ name='right_thumb3',
+ id=118,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb3'),
+ 119:
+ dict(
+ name='right_thumb4',
+ id=119,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb4'),
+ 120:
+ dict(
+ name='right_forefinger1',
+ id=120,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger1'),
+ 121:
+ dict(
+ name='right_forefinger2',
+ id=121,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger2'),
+ 122:
+ dict(
+ name='right_forefinger3',
+ id=122,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger3'),
+ 123:
+ dict(
+ name='right_forefinger4',
+ id=123,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger4'),
+ 124:
+ dict(
+ name='right_middle_finger1',
+ id=124,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 125:
+ dict(
+ name='right_middle_finger2',
+ id=125,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 126:
+ dict(
+ name='right_middle_finger3',
+ id=126,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 127:
+ dict(
+ name='right_middle_finger4',
+ id=127,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 128:
+ dict(
+ name='right_ring_finger1',
+ id=128,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger1'),
+ 129:
+ dict(
+ name='right_ring_finger2',
+ id=129,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger2'),
+ 130:
+ dict(
+ name='right_ring_finger3',
+ id=130,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger3'),
+ 131:
+ dict(
+ name='right_ring_finger4',
+ id=131,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger4'),
+ 132:
+ dict(
+ name='right_pinky_finger1',
+ id=132,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger1'),
+ 133:
+ dict(
+ name='right_pinky_finger2',
+ id=133,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger2'),
+ 134:
+ dict(
+ name='right_pinky_finger3',
+ id=134,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger3'),
+ 135:
+ dict(
+ name='right_pinky_finger4',
+ id=135,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger4')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('left_hip', 'hip'), id=2, color=[0, 255, 0]),
+ 3:
+ dict(link=('right_ankle', 'right_knee'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('right_knee', 'right_hip'), id=4, color=[255, 128, 0]),
+ 5:
+ dict(link=('right_hip', 'hip'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(link=('head', 'neck'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(link=('neck', 'hip'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('neck', 'left_shoulder'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(link=('left_shoulder', 'left_elbow'), id=9, color=[0, 255, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('neck', 'right_shoulder'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=12, color=[255, 128,
+ 0]),
+ 13:
+ dict(link=('right_elbow', 'right_wrist'), id=13, color=[255, 128, 0]),
+ 14:
+ dict(link=('left_eye', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('nose', 'left_eye'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('nose', 'right_eye'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_eye', 'left_ear'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(link=('right_eye', 'right_ear'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ear', 'left_shoulder'), id=19, color=[51, 153, 255]),
+ 20:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=20, color=[51, 153, 255]),
+ 21:
+ dict(link=('left_ankle', 'left_big_toe'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(link=('left_ankle', 'left_small_toe'), id=22, color=[0, 255, 0]),
+ 23:
+ dict(link=('left_ankle', 'left_heel'), id=23, color=[0, 255, 0]),
+ 24:
+ dict(
+ link=('right_ankle', 'right_big_toe'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(
+ link=('right_ankle', 'right_small_toe'),
+ id=25,
+ color=[255, 128, 0]),
+ 26:
+ dict(link=('right_ankle', 'right_heel'), id=26, color=[255, 128, 0]),
+ 27:
+ dict(link=('left_wrist', 'left_thumb1'), id=27, color=[255, 128, 0]),
+ 28:
+ dict(link=('left_thumb1', 'left_thumb2'), id=28, color=[255, 128, 0]),
+ 29:
+ dict(link=('left_thumb2', 'left_thumb3'), id=29, color=[255, 128, 0]),
+ 30:
+ dict(link=('left_thumb3', 'left_thumb4'), id=30, color=[255, 128, 0]),
+ 31:
+ dict(
+ link=('left_wrist', 'left_forefinger1'),
+ id=31,
+ color=[255, 153, 255]),
+ 32:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=32,
+ color=[255, 153, 255]),
+ 33:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=33,
+ color=[255, 153, 255]),
+ 34:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=34,
+ color=[255, 153, 255]),
+ 35:
+ dict(
+ link=('left_wrist', 'left_middle_finger1'),
+ id=35,
+ color=[102, 178, 255]),
+ 36:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=36,
+ color=[102, 178, 255]),
+ 37:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=37,
+ color=[102, 178, 255]),
+ 38:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=38,
+ color=[102, 178, 255]),
+ 39:
+ dict(
+ link=('left_wrist', 'left_ring_finger1'),
+ id=39,
+ color=[255, 51, 51]),
+ 40:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=40,
+ color=[255, 51, 51]),
+ 41:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=41,
+ color=[255, 51, 51]),
+ 42:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=42,
+ color=[255, 51, 51]),
+ 43:
+ dict(
+ link=('left_wrist', 'left_pinky_finger1'),
+ id=43,
+ color=[0, 255, 0]),
+ 44:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=44,
+ color=[0, 255, 0]),
+ 45:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=45,
+ color=[0, 255, 0]),
+ 46:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=46,
+ color=[0, 255, 0]),
+ 47:
+ dict(link=('right_wrist', 'right_thumb1'), id=47, color=[255, 128, 0]),
+ 48:
+ dict(
+ link=('right_thumb1', 'right_thumb2'), id=48, color=[255, 128, 0]),
+ 49:
+ dict(
+ link=('right_thumb2', 'right_thumb3'), id=49, color=[255, 128, 0]),
+ 50:
+ dict(
+ link=('right_thumb3', 'right_thumb4'), id=50, color=[255, 128, 0]),
+ 51:
+ dict(
+ link=('right_wrist', 'right_forefinger1'),
+ id=51,
+ color=[255, 153, 255]),
+ 52:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=52,
+ color=[255, 153, 255]),
+ 53:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=53,
+ color=[255, 153, 255]),
+ 54:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=54,
+ color=[255, 153, 255]),
+ 55:
+ dict(
+ link=('right_wrist', 'right_middle_finger1'),
+ id=55,
+ color=[102, 178, 255]),
+ 56:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=56,
+ color=[102, 178, 255]),
+ 57:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=57,
+ color=[102, 178, 255]),
+ 58:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=58,
+ color=[102, 178, 255]),
+ 59:
+ dict(
+ link=('right_wrist', 'right_ring_finger1'),
+ id=59,
+ color=[255, 51, 51]),
+ 60:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=60,
+ color=[255, 51, 51]),
+ 61:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=61,
+ color=[255, 51, 51]),
+ 62:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=62,
+ color=[255, 51, 51]),
+ 63:
+ dict(
+ link=('right_wrist', 'right_pinky_finger1'),
+ id=63,
+ color=[0, 255, 0]),
+ 64:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=64,
+ color=[0, 255, 0]),
+ 65:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=65,
+ color=[0, 255, 0]),
+ 66:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=66,
+ color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 136,
+
+ # 'https://github.com/Fang-Haoshu/Halpe-FullBody/blob/master/'
+ # 'HalpeCOCOAPI/PythonAPI/halpecocotools/cocoeval.py#L245'
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.08, 0.08, 0.08,
+ 0.089, 0.089, 0.089, 0.089, 0.089, 0.089, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015, 0.015,
+ 0.015, 0.015, 0.015, 0.015, 0.015, 0.015
+ ])
diff --git a/configs/_base_/datasets/halpe26.py b/configs/_base_/datasets/halpe26.py
new file mode 100644
index 0000000000000000000000000000000000000000..cb4df83874c08ee7169aed251b266a03e411ccc9
--- /dev/null
+++ b/configs/_base_/datasets/halpe26.py
@@ -0,0 +1,274 @@
+dataset_info = dict(
+ dataset_name='halpe26',
+ paper_info=dict(
+ author='Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie'
+ ' and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu'
+ ' and Ma, Ze and Chen, Mingyang and Lu, Cewu',
+ title='PaStaNet: Toward Human Activity Knowledge Engine',
+ container='CVPR',
+ year='2020',
+ homepage='https://github.com/Fang-Haoshu/Halpe-FullBody/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(name='head', id=17, color=[255, 128, 0], type='upper', swap=''),
+ 18:
+ dict(name='neck', id=18, color=[255, 128, 0], type='upper', swap=''),
+ 19:
+ dict(name='hip', id=19, color=[255, 128, 0], type='lower', swap=''),
+ 20:
+ dict(
+ name='left_big_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 21:
+ dict(
+ name='right_big_toe',
+ id=21,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 22:
+ dict(
+ name='left_small_toe',
+ id=22,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 23:
+ dict(
+ name='right_small_toe',
+ id=23,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 24:
+ dict(
+ name='left_heel',
+ id=24,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_heel'),
+ 25:
+ dict(
+ name='right_heel',
+ id=25,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_heel')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('left_hip', 'hip'), id=2, color=[0, 255, 0]),
+ 3:
+ dict(link=('right_ankle', 'right_knee'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('right_knee', 'right_hip'), id=4, color=[255, 128, 0]),
+ 5:
+ dict(link=('right_hip', 'hip'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(link=('head', 'neck'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(link=('neck', 'hip'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('neck', 'left_shoulder'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(link=('left_shoulder', 'left_elbow'), id=9, color=[0, 255, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('neck', 'right_shoulder'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=12, color=[255, 128,
+ 0]),
+ 13:
+ dict(link=('right_elbow', 'right_wrist'), id=13, color=[255, 128, 0]),
+ 14:
+ dict(link=('left_eye', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('nose', 'left_eye'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('nose', 'right_eye'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_eye', 'left_ear'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(link=('right_eye', 'right_ear'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ear', 'left_shoulder'), id=19, color=[51, 153, 255]),
+ 20:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=20, color=[51, 153, 255]),
+ 21:
+ dict(link=('left_ankle', 'left_big_toe'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(link=('left_ankle', 'left_small_toe'), id=22, color=[0, 255, 0]),
+ 23:
+ dict(link=('left_ankle', 'left_heel'), id=23, color=[0, 255, 0]),
+ 24:
+ dict(
+ link=('right_ankle', 'right_big_toe'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(
+ link=('right_ankle', 'right_small_toe'),
+ id=25,
+ color=[255, 128, 0]),
+ 26:
+ dict(link=('right_ankle', 'right_heel'), id=26, color=[255, 128, 0]),
+ },
+ # the joint_weights is modified by MMPose Team
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ] + [1., 1., 1.2] + [1.5] * 6,
+
+ # 'https://github.com/Fang-Haoshu/Halpe-FullBody/blob/master/'
+ # 'HalpeCOCOAPI/PythonAPI/halpecocotools/cocoeval.py#L245'
+ sigmas=[
+ 0.026,
+ 0.025,
+ 0.025,
+ 0.035,
+ 0.035,
+ 0.079,
+ 0.079,
+ 0.072,
+ 0.072,
+ 0.062,
+ 0.062,
+ 0.107,
+ 0.107,
+ 0.087,
+ 0.087,
+ 0.089,
+ 0.089,
+ 0.026,
+ 0.026,
+ 0.066,
+ 0.079,
+ 0.079,
+ 0.079,
+ 0.079,
+ 0.079,
+ 0.079,
+ ])
diff --git a/configs/_base_/datasets/horse10.py b/configs/_base_/datasets/horse10.py
new file mode 100644
index 0000000000000000000000000000000000000000..a485bf191bc151b0d76e48f3e55eb8e2dda6c506
--- /dev/null
+++ b/configs/_base_/datasets/horse10.py
@@ -0,0 +1,201 @@
+dataset_info = dict(
+ dataset_name='horse10',
+ paper_info=dict(
+ author='Mathis, Alexander and Biasi, Thomas and '
+ 'Schneider, Steffen and '
+ 'Yuksekgonul, Mert and Rogers, Byron and '
+ 'Bethge, Matthias and '
+ 'Mathis, Mackenzie W',
+ title='Pretraining boosts out-of-domain robustness '
+ 'for pose estimation',
+ container='Proceedings of the IEEE/CVF Winter Conference on '
+ 'Applications of Computer Vision',
+ year='2021',
+ homepage='http://www.mackenziemathislab.org/horse10',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='Nose', id=0, color=[255, 153, 255], type='upper', swap=''),
+ 1:
+ dict(name='Eye', id=1, color=[255, 153, 255], type='upper', swap=''),
+ 2:
+ dict(
+ name='Nearknee',
+ id=2,
+ color=[255, 102, 255],
+ type='upper',
+ swap=''),
+ 3:
+ dict(
+ name='Nearfrontfetlock',
+ id=3,
+ color=[255, 102, 255],
+ type='upper',
+ swap=''),
+ 4:
+ dict(
+ name='Nearfrontfoot',
+ id=4,
+ color=[255, 102, 255],
+ type='upper',
+ swap=''),
+ 5:
+ dict(
+ name='Offknee', id=5, color=[255, 102, 255], type='upper',
+ swap=''),
+ 6:
+ dict(
+ name='Offfrontfetlock',
+ id=6,
+ color=[255, 102, 255],
+ type='upper',
+ swap=''),
+ 7:
+ dict(
+ name='Offfrontfoot',
+ id=7,
+ color=[255, 102, 255],
+ type='upper',
+ swap=''),
+ 8:
+ dict(
+ name='Shoulder',
+ id=8,
+ color=[255, 153, 255],
+ type='upper',
+ swap=''),
+ 9:
+ dict(
+ name='Midshoulder',
+ id=9,
+ color=[255, 153, 255],
+ type='upper',
+ swap=''),
+ 10:
+ dict(
+ name='Elbow', id=10, color=[255, 153, 255], type='upper', swap=''),
+ 11:
+ dict(
+ name='Girth', id=11, color=[255, 153, 255], type='upper', swap=''),
+ 12:
+ dict(
+ name='Wither', id=12, color=[255, 153, 255], type='upper',
+ swap=''),
+ 13:
+ dict(
+ name='Nearhindhock',
+ id=13,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 14:
+ dict(
+ name='Nearhindfetlock',
+ id=14,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 15:
+ dict(
+ name='Nearhindfoot',
+ id=15,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 16:
+ dict(name='Hip', id=16, color=[255, 153, 255], type='lower', swap=''),
+ 17:
+ dict(
+ name='Stifle', id=17, color=[255, 153, 255], type='lower',
+ swap=''),
+ 18:
+ dict(
+ name='Offhindhock',
+ id=18,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 19:
+ dict(
+ name='Offhindfetlock',
+ id=19,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 20:
+ dict(
+ name='Offhindfoot',
+ id=20,
+ color=[255, 51, 255],
+ type='lower',
+ swap=''),
+ 21:
+ dict(
+ name='Ischium',
+ id=21,
+ color=[255, 153, 255],
+ type='lower',
+ swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('Nose', 'Eye'), id=0, color=[255, 153, 255]),
+ 1:
+ dict(link=('Eye', 'Wither'), id=1, color=[255, 153, 255]),
+ 2:
+ dict(link=('Wither', 'Hip'), id=2, color=[255, 153, 255]),
+ 3:
+ dict(link=('Hip', 'Ischium'), id=3, color=[255, 153, 255]),
+ 4:
+ dict(link=('Ischium', 'Stifle'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('Stifle', 'Girth'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('Girth', 'Elbow'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('Elbow', 'Shoulder'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('Shoulder', 'Midshoulder'), id=8, color=[255, 153, 255]),
+ 9:
+ dict(link=('Midshoulder', 'Wither'), id=9, color=[255, 153, 255]),
+ 10:
+ dict(
+ link=('Nearknee', 'Nearfrontfetlock'),
+ id=10,
+ color=[255, 102, 255]),
+ 11:
+ dict(
+ link=('Nearfrontfetlock', 'Nearfrontfoot'),
+ id=11,
+ color=[255, 102, 255]),
+ 12:
+ dict(
+ link=('Offknee', 'Offfrontfetlock'), id=12, color=[255, 102, 255]),
+ 13:
+ dict(
+ link=('Offfrontfetlock', 'Offfrontfoot'),
+ id=13,
+ color=[255, 102, 255]),
+ 14:
+ dict(
+ link=('Nearhindhock', 'Nearhindfetlock'),
+ id=14,
+ color=[255, 51, 255]),
+ 15:
+ dict(
+ link=('Nearhindfetlock', 'Nearhindfoot'),
+ id=15,
+ color=[255, 51, 255]),
+ 16:
+ dict(
+ link=('Offhindhock', 'Offhindfetlock'),
+ id=16,
+ color=[255, 51, 255]),
+ 17:
+ dict(
+ link=('Offhindfetlock', 'Offhindfoot'),
+ id=17,
+ color=[255, 51, 255])
+ },
+ joint_weights=[1.] * 22,
+ sigmas=[])
diff --git a/configs/_base_/datasets/humanart.py b/configs/_base_/datasets/humanart.py
new file mode 100644
index 0000000000000000000000000000000000000000..b549269b692682f5dd0350e6f557edeb25730126
--- /dev/null
+++ b/configs/_base_/datasets/humanart.py
@@ -0,0 +1,181 @@
+dataset_info = dict(
+ dataset_name='Human-Art',
+ paper_info=dict(
+ author='Ju, Xuan and Zeng, Ailing and '
+ 'Wang, Jianan and Xu, Qiang and Zhang, Lei',
+ title='Human-Art: A Versatile Human-Centric Dataset '
+ 'Bridging Natural and Artificial Scenes',
+ container='Proceedings of the IEEE/CVF Conference on '
+ 'Computer Vision and Pattern Recognition',
+ year='2023',
+ homepage='https://idea-research.github.io/HumanArt/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/humanart21.py b/configs/_base_/datasets/humanart21.py
new file mode 100644
index 0000000000000000000000000000000000000000..e6d935d1a97e00aac7830a01f587840321b68625
--- /dev/null
+++ b/configs/_base_/datasets/humanart21.py
@@ -0,0 +1,218 @@
+dataset_info = dict(
+ dataset_name='Human-Art',
+ paper_info=dict(
+ author='Ju, Xuan and Zeng, Ailing and '
+ 'Wang, Jianan and Xu, Qiang and Zhang, Lei',
+ title='Human-Art: A Versatile Human-Centric Dataset '
+ 'Bridging Natural and Artificial Scenes',
+ container='Proceedings of the IEEE/CVF Conference on '
+ 'Computer Vision and Pattern Recognition',
+ year='2023',
+ homepage='https://idea-research.github.io/HumanArt/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='left_finger',
+ id=17,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_finger'),
+ 18:
+ dict(
+ name='right_finger',
+ id=18,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_finger'),
+ 19:
+ dict(
+ name='left_toe',
+ id=19,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_toe'),
+ 20:
+ dict(
+ name='right_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_toe'),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ankle', 'left_toe'), id=19, color=[0, 255, 0]),
+ 20:
+ dict(link=('right_ankle', 'right_toe'), id=20, color=[255, 128, 0]),
+ 21:
+ dict(link=('left_wrist', 'left_finger'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(link=('right_wrist', 'right_finger'), id=22, color=[255, 128, 0]),
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5, 1., 1., 1., 1.
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.089, 0.089, 0.089,
+ 0.089
+ ])
diff --git a/configs/_base_/datasets/humanart_aic.py b/configs/_base_/datasets/humanart_aic.py
new file mode 100644
index 0000000000000000000000000000000000000000..e99942753606346d24d19ece5a52b55dff72840f
--- /dev/null
+++ b/configs/_base_/datasets/humanart_aic.py
@@ -0,0 +1,205 @@
+dataset_info = dict(
+ dataset_name='humanart',
+ paper_info=[
+ dict(
+ author='Ju, Xuan and Zeng, Ailing and '
+ 'Wang, Jianan and Xu, Qiang and Zhang, '
+ 'Lei',
+ title='Human-Art: A Versatile Human-Centric Dataset '
+ 'Bridging Natural and Artificial Scenes',
+ container='CVPR',
+ year='2023',
+ homepage='https://idea-research.github.io/HumanArt/',
+ ),
+ dict(
+ author='Wu, Jiahong and Zheng, He and Zhao, Bo and '
+ 'Li, Yixin and Yan, Baoming and Liang, Rui and '
+ 'Wang, Wenjia and Zhou, Shipei and Lin, Guosen and '
+ 'Fu, Yanwei and others',
+ title='Ai challenger: A large-scale dataset for going '
+ 'deeper in image understanding',
+ container='arXiv',
+ year='2017',
+ homepage='https://github.com/AIChallenger/AI_Challenger_2017',
+ ),
+ ],
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='head_top',
+ id=17,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 18:
+ dict(name='neck', id=18, color=[51, 153, 255], type='upper', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('head_top', 'neck'), id=11, color=[51, 153, 255]),
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5, 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.026, 0.026
+ ])
diff --git a/configs/_base_/datasets/interhand2d.py b/configs/_base_/datasets/interhand2d.py
new file mode 100644
index 0000000000000000000000000000000000000000..0134f07de5bf536eaffbf71155a7e6eb33b24f0a
--- /dev/null
+++ b/configs/_base_/datasets/interhand2d.py
@@ -0,0 +1,142 @@
+dataset_info = dict(
+ dataset_name='interhand2d',
+ paper_info=dict(
+ author='Moon, Gyeongsik and Yu, Shoou-I and Wen, He and '
+ 'Shiratori, Takaaki and Lee, Kyoung Mu',
+ title='InterHand2.6M: A dataset and baseline for 3D '
+ 'interacting hand pose estimation from a single RGB image',
+ container='arXiv',
+ year='2020',
+ homepage='https://mks0601.github.io/InterHand2.6M/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='thumb4', id=0, color=[255, 128, 0], type='', swap=''),
+ 1:
+ dict(name='thumb3', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb2', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb1', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(
+ name='forefinger4', id=4, color=[255, 153, 255], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger3', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger2', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger1', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='middle_finger4',
+ id=8,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 9:
+ dict(
+ name='middle_finger3',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger1',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='ring_finger4', id=12, color=[255, 51, 51], type='', swap=''),
+ 13:
+ dict(
+ name='ring_finger3', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger2', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger1', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(name='pinky_finger4', id=16, color=[0, 255, 0], type='', swap=''),
+ 17:
+ dict(name='pinky_finger3', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger2', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger1', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='wrist', id=20, color=[255, 255, 255], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[])
diff --git a/configs/_base_/datasets/interhand3d.py b/configs/_base_/datasets/interhand3d.py
new file mode 100644
index 0000000000000000000000000000000000000000..e2bd8121c281c741ec9b980c7570ebef8a632993
--- /dev/null
+++ b/configs/_base_/datasets/interhand3d.py
@@ -0,0 +1,487 @@
+dataset_info = dict(
+ dataset_name='interhand3d',
+ paper_info=dict(
+ author='Moon, Gyeongsik and Yu, Shoou-I and Wen, He and '
+ 'Shiratori, Takaaki and Lee, Kyoung Mu',
+ title='InterHand2.6M: A dataset and baseline for 3D '
+ 'interacting hand pose estimation from a single RGB image',
+ container='arXiv',
+ year='2020',
+ homepage='https://mks0601.github.io/InterHand2.6M/',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_thumb4',
+ id=0,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb4'),
+ 1:
+ dict(
+ name='right_thumb3',
+ id=1,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb3'),
+ 2:
+ dict(
+ name='right_thumb2',
+ id=2,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb2'),
+ 3:
+ dict(
+ name='right_thumb1',
+ id=3,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb1'),
+ 4:
+ dict(
+ name='right_forefinger4',
+ id=4,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger4'),
+ 5:
+ dict(
+ name='right_forefinger3',
+ id=5,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger3'),
+ 6:
+ dict(
+ name='right_forefinger2',
+ id=6,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger2'),
+ 7:
+ dict(
+ name='right_forefinger1',
+ id=7,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger1'),
+ 8:
+ dict(
+ name='right_middle_finger4',
+ id=8,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 9:
+ dict(
+ name='right_middle_finger3',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 10:
+ dict(
+ name='right_middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 11:
+ dict(
+ name='right_middle_finger1',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 12:
+ dict(
+ name='right_ring_finger4',
+ id=12,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger4'),
+ 13:
+ dict(
+ name='right_ring_finger3',
+ id=13,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger3'),
+ 14:
+ dict(
+ name='right_ring_finger2',
+ id=14,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger2'),
+ 15:
+ dict(
+ name='right_ring_finger1',
+ id=15,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger1'),
+ 16:
+ dict(
+ name='right_pinky_finger4',
+ id=16,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger4'),
+ 17:
+ dict(
+ name='right_pinky_finger3',
+ id=17,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger3'),
+ 18:
+ dict(
+ name='right_pinky_finger2',
+ id=18,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger2'),
+ 19:
+ dict(
+ name='right_pinky_finger1',
+ id=19,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger1'),
+ 20:
+ dict(
+ name='right_wrist',
+ id=20,
+ color=[255, 255, 255],
+ type='',
+ swap='left_wrist'),
+ 21:
+ dict(
+ name='left_thumb4',
+ id=21,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb4'),
+ 22:
+ dict(
+ name='left_thumb3',
+ id=22,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb3'),
+ 23:
+ dict(
+ name='left_thumb2',
+ id=23,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb2'),
+ 24:
+ dict(
+ name='left_thumb1',
+ id=24,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb1'),
+ 25:
+ dict(
+ name='left_forefinger4',
+ id=25,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger4'),
+ 26:
+ dict(
+ name='left_forefinger3',
+ id=26,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger3'),
+ 27:
+ dict(
+ name='left_forefinger2',
+ id=27,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger2'),
+ 28:
+ dict(
+ name='left_forefinger1',
+ id=28,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger1'),
+ 29:
+ dict(
+ name='left_middle_finger4',
+ id=29,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 30:
+ dict(
+ name='left_middle_finger3',
+ id=30,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 31:
+ dict(
+ name='left_middle_finger2',
+ id=31,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 32:
+ dict(
+ name='left_middle_finger1',
+ id=32,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 33:
+ dict(
+ name='left_ring_finger4',
+ id=33,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger4'),
+ 34:
+ dict(
+ name='left_ring_finger3',
+ id=34,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger3'),
+ 35:
+ dict(
+ name='left_ring_finger2',
+ id=35,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger2'),
+ 36:
+ dict(
+ name='left_ring_finger1',
+ id=36,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger1'),
+ 37:
+ dict(
+ name='left_pinky_finger4',
+ id=37,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger4'),
+ 38:
+ dict(
+ name='left_pinky_finger3',
+ id=38,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger3'),
+ 39:
+ dict(
+ name='left_pinky_finger2',
+ id=39,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger2'),
+ 40:
+ dict(
+ name='left_pinky_finger1',
+ id=40,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger1'),
+ 41:
+ dict(
+ name='left_wrist',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='right_wrist'),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_wrist', 'right_thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('right_thumb1', 'right_thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('right_thumb2', 'right_thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_thumb3', 'right_thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(
+ link=('right_wrist', 'right_forefinger1'),
+ id=4,
+ color=[255, 153, 255]),
+ 5:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=5,
+ color=[255, 153, 255]),
+ 6:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=6,
+ color=[255, 153, 255]),
+ 7:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=7,
+ color=[255, 153, 255]),
+ 8:
+ dict(
+ link=('right_wrist', 'right_middle_finger1'),
+ id=8,
+ color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(
+ link=('right_wrist', 'right_ring_finger1'),
+ id=12,
+ color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=13,
+ color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=14,
+ color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=15,
+ color=[255, 51, 51]),
+ 16:
+ dict(
+ link=('right_wrist', 'right_pinky_finger1'),
+ id=16,
+ color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=17,
+ color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=18,
+ color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=19,
+ color=[0, 255, 0]),
+ 20:
+ dict(link=('left_wrist', 'left_thumb1'), id=20, color=[255, 128, 0]),
+ 21:
+ dict(link=('left_thumb1', 'left_thumb2'), id=21, color=[255, 128, 0]),
+ 22:
+ dict(link=('left_thumb2', 'left_thumb3'), id=22, color=[255, 128, 0]),
+ 23:
+ dict(link=('left_thumb3', 'left_thumb4'), id=23, color=[255, 128, 0]),
+ 24:
+ dict(
+ link=('left_wrist', 'left_forefinger1'),
+ id=24,
+ color=[255, 153, 255]),
+ 25:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=25,
+ color=[255, 153, 255]),
+ 26:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=26,
+ color=[255, 153, 255]),
+ 27:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=27,
+ color=[255, 153, 255]),
+ 28:
+ dict(
+ link=('left_wrist', 'left_middle_finger1'),
+ id=28,
+ color=[102, 178, 255]),
+ 29:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=29,
+ color=[102, 178, 255]),
+ 30:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=30,
+ color=[102, 178, 255]),
+ 31:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=31,
+ color=[102, 178, 255]),
+ 32:
+ dict(
+ link=('left_wrist', 'left_ring_finger1'),
+ id=32,
+ color=[255, 51, 51]),
+ 33:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=33,
+ color=[255, 51, 51]),
+ 34:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=34,
+ color=[255, 51, 51]),
+ 35:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=35,
+ color=[255, 51, 51]),
+ 36:
+ dict(
+ link=('left_wrist', 'left_pinky_finger1'),
+ id=36,
+ color=[0, 255, 0]),
+ 37:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=37,
+ color=[0, 255, 0]),
+ 38:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=38,
+ color=[0, 255, 0]),
+ 39:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=39,
+ color=[0, 255, 0]),
+ },
+ joint_weights=[1.] * 42,
+ sigmas=[])
diff --git a/configs/_base_/datasets/jhmdb.py b/configs/_base_/datasets/jhmdb.py
new file mode 100644
index 0000000000000000000000000000000000000000..1b37488498a2bade1fa6f2ff6532fcd219071803
--- /dev/null
+++ b/configs/_base_/datasets/jhmdb.py
@@ -0,0 +1,129 @@
+dataset_info = dict(
+ dataset_name='jhmdb',
+ paper_info=dict(
+ author='H. Jhuang and J. Gall and S. Zuffi and '
+ 'C. Schmid and M. J. Black',
+ title='Towards understanding action recognition',
+ container='International Conf. on Computer Vision (ICCV)',
+ year='2013',
+ homepage='http://jhmdb.is.tue.mpg.de/dataset',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='neck', id=0, color=[255, 128, 0], type='upper', swap=''),
+ 1:
+ dict(name='belly', id=1, color=[255, 128, 0], type='upper', swap=''),
+ 2:
+ dict(name='head', id=2, color=[255, 128, 0], type='upper', swap=''),
+ 3:
+ dict(
+ name='right_shoulder',
+ id=3,
+ color=[0, 255, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 4:
+ dict(
+ name='left_shoulder',
+ id=4,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 5:
+ dict(
+ name='right_hip',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='left_hip'),
+ 6:
+ dict(
+ name='left_hip',
+ id=6,
+ color=[51, 153, 255],
+ type='lower',
+ swap='right_hip'),
+ 7:
+ dict(
+ name='right_elbow',
+ id=7,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_elbow'),
+ 8:
+ dict(
+ name='left_elbow',
+ id=8,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_elbow'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[51, 153, 255],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='left_knee',
+ id=10,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_knee'),
+ 11:
+ dict(
+ name='right_wrist',
+ id=11,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 12:
+ dict(
+ name='left_wrist',
+ id=12,
+ color=[255, 128, 0],
+ type='upper',
+ swap='right_wrist'),
+ 13:
+ dict(
+ name='right_ankle',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='left_ankle'),
+ 14:
+ dict(
+ name='left_ankle',
+ id=14,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle')
+ },
+ skeleton_info={
+ 0: dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ 1: dict(link=('right_knee', 'right_hip'), id=1, color=[255, 128, 0]),
+ 2: dict(link=('right_hip', 'belly'), id=2, color=[255, 128, 0]),
+ 3: dict(link=('belly', 'left_hip'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('left_hip', 'left_knee'), id=4, color=[0, 255, 0]),
+ 5: dict(link=('left_knee', 'left_ankle'), id=5, color=[0, 255, 0]),
+ 6: dict(link=('belly', 'neck'), id=6, color=[51, 153, 255]),
+ 7: dict(link=('neck', 'head'), id=7, color=[51, 153, 255]),
+ 8: dict(link=('neck', 'right_shoulder'), id=8, color=[255, 128, 0]),
+ 9: dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('right_elbow', 'right_wrist'), id=10, color=[255, 128, 0]),
+ 11: dict(link=('neck', 'left_shoulder'), id=11, color=[0, 255, 0]),
+ 12:
+ dict(link=('left_shoulder', 'left_elbow'), id=12, color=[0, 255, 0]),
+ 13: dict(link=('left_elbow', 'left_wrist'), id=13, color=[0, 255, 0])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.2, 1.2, 1.5, 1.5, 1.5, 1.5
+ ],
+ # Adapted from COCO dataset.
+ sigmas=[
+ 0.025, 0.107, 0.025, 0.079, 0.079, 0.107, 0.107, 0.072, 0.072, 0.087,
+ 0.087, 0.062, 0.062, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/lapa.py b/configs/_base_/datasets/lapa.py
new file mode 100644
index 0000000000000000000000000000000000000000..3929edd90ed94b8717fdac62017277d1435a74f2
--- /dev/null
+++ b/configs/_base_/datasets/lapa.py
@@ -0,0 +1,246 @@
+dataset_info = dict(
+ dataset_name='lapa',
+ paper_info=dict(
+ author='Liu, Yinglu and Shi, Hailin and Shen, Hao and Si, '
+ 'Yue and Wang, Xiaobo and Mei, Tao',
+ title='A New Dataset and Boundary-Attention Semantic '
+ 'Segmentation for Face Parsing.',
+ container='Proceedings of the AAAI Conference on '
+ 'Artificial Intelligence 2020',
+ year='2020',
+ homepage='https://github.com/JDAI-CV/lapa-dataset',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap='kpt-32'),
+ 1:
+ dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap='kpt-31'),
+ 2:
+ dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap='kpt-30'),
+ 3:
+ dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap='kpt-29'),
+ 4:
+ dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap='kpt-28'),
+ 5:
+ dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap='kpt-27'),
+ 6:
+ dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap='kpt-26'),
+ 7:
+ dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap='kpt-25'),
+ 8:
+ dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap='kpt-24'),
+ 9:
+ dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap='kpt-23'),
+ 10:
+ dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap='kpt-22'),
+ 11:
+ dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap='kpt-21'),
+ 12:
+ dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap='kpt-20'),
+ 13:
+ dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap='kpt-19'),
+ 14:
+ dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap='kpt-18'),
+ 15:
+ dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap='kpt-17'),
+ 16:
+ dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap=''),
+ 17:
+ dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap='kpt-15'),
+ 18:
+ dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap='kpt-14'),
+ 19:
+ dict(name='kpt-19', id=19, color=[255, 0, 0], type='', swap='kpt-13'),
+ 20:
+ dict(name='kpt-20', id=20, color=[255, 0, 0], type='', swap='kpt-12'),
+ 21:
+ dict(name='kpt-21', id=21, color=[255, 0, 0], type='', swap='kpt-11'),
+ 22:
+ dict(name='kpt-22', id=22, color=[255, 0, 0], type='', swap='kpt-10'),
+ 23:
+ dict(name='kpt-23', id=23, color=[255, 0, 0], type='', swap='kpt-9'),
+ 24:
+ dict(name='kpt-24', id=24, color=[255, 0, 0], type='', swap='kpt-8'),
+ 25:
+ dict(name='kpt-25', id=25, color=[255, 0, 0], type='', swap='kpt-7'),
+ 26:
+ dict(name='kpt-26', id=26, color=[255, 0, 0], type='', swap='kpt-6'),
+ 27:
+ dict(name='kpt-27', id=27, color=[255, 0, 0], type='', swap='kpt-5'),
+ 28:
+ dict(name='kpt-28', id=28, color=[255, 0, 0], type='', swap='kpt-4'),
+ 29:
+ dict(name='kpt-29', id=29, color=[255, 0, 0], type='', swap='kpt-3'),
+ 30:
+ dict(name='kpt-30', id=30, color=[255, 0, 0], type='', swap='kpt-2'),
+ 31:
+ dict(name='kpt-31', id=31, color=[255, 0, 0], type='', swap='kpt-1'),
+ 32:
+ dict(name='kpt-32', id=32, color=[255, 0, 0], type='', swap='kpt-0'),
+ 33:
+ dict(name='kpt-33', id=33, color=[255, 0, 0], type='', swap='kpt-46'),
+ 34:
+ dict(name='kpt-34', id=34, color=[255, 0, 0], type='', swap='kpt-45'),
+ 35:
+ dict(name='kpt-35', id=35, color=[255, 0, 0], type='', swap='kpt-44'),
+ 36:
+ dict(name='kpt-36', id=36, color=[255, 0, 0], type='', swap='kpt-43'),
+ 37:
+ dict(name='kpt-37', id=37, color=[255, 0, 0], type='', swap='kpt-42'),
+ 38:
+ dict(name='kpt-38', id=38, color=[255, 0, 0], type='', swap='kpt-50'),
+ 39:
+ dict(name='kpt-39', id=39, color=[255, 0, 0], type='', swap='kpt-49'),
+ 40:
+ dict(name='kpt-40', id=40, color=[255, 0, 0], type='', swap='kpt-48'),
+ 41:
+ dict(name='kpt-41', id=41, color=[255, 0, 0], type='', swap='kpt-47'),
+ 42:
+ dict(name='kpt-42', id=42, color=[255, 0, 0], type='', swap='kpt-37'),
+ 43:
+ dict(name='kpt-43', id=43, color=[255, 0, 0], type='', swap='kpt-36'),
+ 44:
+ dict(name='kpt-44', id=44, color=[255, 0, 0], type='', swap='kpt-35'),
+ 45:
+ dict(name='kpt-45', id=45, color=[255, 0, 0], type='', swap='kpt-34'),
+ 46:
+ dict(name='kpt-46', id=46, color=[255, 0, 0], type='', swap='kpt-33'),
+ 47:
+ dict(name='kpt-47', id=47, color=[255, 0, 0], type='', swap='kpt-41'),
+ 48:
+ dict(name='kpt-48', id=48, color=[255, 0, 0], type='', swap='kpt-40'),
+ 49:
+ dict(name='kpt-49', id=49, color=[255, 0, 0], type='', swap='kpt-39'),
+ 50:
+ dict(name='kpt-50', id=50, color=[255, 0, 0], type='', swap='kpt-38'),
+ 51:
+ dict(name='kpt-51', id=51, color=[255, 0, 0], type='', swap=''),
+ 52:
+ dict(name='kpt-52', id=52, color=[255, 0, 0], type='', swap=''),
+ 53:
+ dict(name='kpt-53', id=53, color=[255, 0, 0], type='', swap=''),
+ 54:
+ dict(name='kpt-54', id=54, color=[255, 0, 0], type='', swap=''),
+ 55:
+ dict(name='kpt-55', id=55, color=[255, 0, 0], type='', swap='kpt-65'),
+ 56:
+ dict(name='kpt-56', id=56, color=[255, 0, 0], type='', swap='kpt-64'),
+ 57:
+ dict(name='kpt-57', id=57, color=[255, 0, 0], type='', swap='kpt-63'),
+ 58:
+ dict(name='kpt-58', id=58, color=[255, 0, 0], type='', swap='kpt-62'),
+ 59:
+ dict(name='kpt-59', id=59, color=[255, 0, 0], type='', swap='kpt-61'),
+ 60:
+ dict(name='kpt-60', id=60, color=[255, 0, 0], type='', swap=''),
+ 61:
+ dict(name='kpt-61', id=61, color=[255, 0, 0], type='', swap='kpt-59'),
+ 62:
+ dict(name='kpt-62', id=62, color=[255, 0, 0], type='', swap='kpt-58'),
+ 63:
+ dict(name='kpt-63', id=63, color=[255, 0, 0], type='', swap='kpt-57'),
+ 64:
+ dict(name='kpt-64', id=64, color=[255, 0, 0], type='', swap='kpt-56'),
+ 65:
+ dict(name='kpt-65', id=65, color=[255, 0, 0], type='', swap='kpt-55'),
+ 66:
+ dict(name='kpt-66', id=66, color=[255, 0, 0], type='', swap='kpt-79'),
+ 67:
+ dict(name='kpt-67', id=67, color=[255, 0, 0], type='', swap='kpt-78'),
+ 68:
+ dict(name='kpt-68', id=68, color=[255, 0, 0], type='', swap='kpt-77'),
+ 69:
+ dict(name='kpt-69', id=69, color=[255, 0, 0], type='', swap='kpt-76'),
+ 70:
+ dict(name='kpt-70', id=70, color=[255, 0, 0], type='', swap='kpt-75'),
+ 71:
+ dict(name='kpt-71', id=71, color=[255, 0, 0], type='', swap='kpt-82'),
+ 72:
+ dict(name='kpt-72', id=72, color=[255, 0, 0], type='', swap='kpt-81'),
+ 73:
+ dict(name='kpt-73', id=73, color=[255, 0, 0], type='', swap='kpt-80'),
+ 74:
+ dict(name='kpt-74', id=74, color=[255, 0, 0], type='', swap='kpt-83'),
+ 75:
+ dict(name='kpt-75', id=75, color=[255, 0, 0], type='', swap='kpt-70'),
+ 76:
+ dict(name='kpt-76', id=76, color=[255, 0, 0], type='', swap='kpt-69'),
+ 77:
+ dict(name='kpt-77', id=77, color=[255, 0, 0], type='', swap='kpt-68'),
+ 78:
+ dict(name='kpt-78', id=78, color=[255, 0, 0], type='', swap='kpt-67'),
+ 79:
+ dict(name='kpt-79', id=79, color=[255, 0, 0], type='', swap='kpt-66'),
+ 80:
+ dict(name='kpt-80', id=80, color=[255, 0, 0], type='', swap='kpt-73'),
+ 81:
+ dict(name='kpt-81', id=81, color=[255, 0, 0], type='', swap='kpt-72'),
+ 82:
+ dict(name='kpt-82', id=82, color=[255, 0, 0], type='', swap='kpt-71'),
+ 83:
+ dict(name='kpt-83', id=83, color=[255, 0, 0], type='', swap='kpt-74'),
+ 84:
+ dict(name='kpt-84', id=84, color=[255, 0, 0], type='', swap='kpt-90'),
+ 85:
+ dict(name='kpt-85', id=85, color=[255, 0, 0], type='', swap='kpt-89'),
+ 86:
+ dict(name='kpt-86', id=86, color=[255, 0, 0], type='', swap='kpt-88'),
+ 87:
+ dict(name='kpt-87', id=87, color=[255, 0, 0], type='', swap=''),
+ 88:
+ dict(name='kpt-88', id=88, color=[255, 0, 0], type='', swap='kpt-86'),
+ 89:
+ dict(name='kpt-89', id=89, color=[255, 0, 0], type='', swap='kpt-85'),
+ 90:
+ dict(name='kpt-90', id=90, color=[255, 0, 0], type='', swap='kpt-84'),
+ 91:
+ dict(name='kpt-91', id=91, color=[255, 0, 0], type='', swap='kpt-95'),
+ 92:
+ dict(name='kpt-92', id=92, color=[255, 0, 0], type='', swap='kpt-94'),
+ 93:
+ dict(name='kpt-93', id=93, color=[255, 0, 0], type='', swap=''),
+ 94:
+ dict(name='kpt-94', id=94, color=[255, 0, 0], type='', swap='kpt-92'),
+ 95:
+ dict(name='kpt-95', id=95, color=[255, 0, 0], type='', swap='kpt-91'),
+ 96:
+ dict(name='kpt-96', id=96, color=[255, 0, 0], type='', swap='kpt-100'),
+ 97:
+ dict(name='kpt-97', id=97, color=[255, 0, 0], type='', swap='kpt-99'),
+ 98:
+ dict(name='kpt-98', id=98, color=[255, 0, 0], type='', swap=''),
+ 99:
+ dict(name='kpt-99', id=99, color=[255, 0, 0], type='', swap='kpt-97'),
+ 100:
+ dict(
+ name='kpt-100', id=100, color=[255, 0, 0], type='', swap='kpt-96'),
+ 101:
+ dict(
+ name='kpt-101', id=101, color=[255, 0, 0], type='',
+ swap='kpt-103'),
+ 102:
+ dict(name='kpt-102', id=102, color=[255, 0, 0], type='', swap=''),
+ 103:
+ dict(
+ name='kpt-103', id=103, color=[255, 0, 0], type='',
+ swap='kpt-101'),
+ 104:
+ dict(
+ name='kpt-104', id=104, color=[255, 0, 0], type='',
+ swap='kpt-105'),
+ 105:
+ dict(
+ name='kpt-105', id=105, color=[255, 0, 0], type='', swap='kpt-104')
+ },
+ skeleton_info={},
+ joint_weights=[
+ 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8,
+ 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8, 0.8,
+ 0.8, 0.8, 0.8, 0.8, 0.8, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
+ 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
+ 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 2.0, 2.0, 2.0, 2.0,
+ 2.0, 2.0, 2.0, 2.0, 1.0, 2.0, 2.0, 2.0, 2.0, 2.0, 2.0, 2.0, 2.0, 1.0,
+ 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.5,
+ 1.5, 1.5, 1.5, 1.5, 1.5, 1.5, 1.0, 1.0
+ ],
+ sigmas=[])
diff --git a/configs/_base_/datasets/locust.py b/configs/_base_/datasets/locust.py
new file mode 100644
index 0000000000000000000000000000000000000000..db3fa15aa060b5806faae7a21f65460f77be2745
--- /dev/null
+++ b/configs/_base_/datasets/locust.py
@@ -0,0 +1,263 @@
+dataset_info = dict(
+ dataset_name='locust',
+ paper_info=dict(
+ author='Graving, Jacob M and Chae, Daniel and Naik, Hemal and '
+ 'Li, Liang and Koger, Benjamin and Costelloe, Blair R and '
+ 'Couzin, Iain D',
+ title='DeepPoseKit, a software toolkit for fast and robust '
+ 'animal pose estimation using deep learning',
+ container='Elife',
+ year='2019',
+ homepage='https://github.com/jgraving/DeepPoseKit-Data',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='head', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='neck', id=1, color=[255, 255, 255], type='', swap=''),
+ 2:
+ dict(name='thorax', id=2, color=[255, 255, 255], type='', swap=''),
+ 3:
+ dict(name='abdomen1', id=3, color=[255, 255, 255], type='', swap=''),
+ 4:
+ dict(name='abdomen2', id=4, color=[255, 255, 255], type='', swap=''),
+ 5:
+ dict(
+ name='anttipL',
+ id=5,
+ color=[255, 255, 255],
+ type='',
+ swap='anttipR'),
+ 6:
+ dict(
+ name='antbaseL',
+ id=6,
+ color=[255, 255, 255],
+ type='',
+ swap='antbaseR'),
+ 7:
+ dict(name='eyeL', id=7, color=[255, 255, 255], type='', swap='eyeR'),
+ 8:
+ dict(
+ name='forelegL1',
+ id=8,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR1'),
+ 9:
+ dict(
+ name='forelegL2',
+ id=9,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR2'),
+ 10:
+ dict(
+ name='forelegL3',
+ id=10,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR3'),
+ 11:
+ dict(
+ name='forelegL4',
+ id=11,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR4'),
+ 12:
+ dict(
+ name='midlegL1',
+ id=12,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR1'),
+ 13:
+ dict(
+ name='midlegL2',
+ id=13,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR2'),
+ 14:
+ dict(
+ name='midlegL3',
+ id=14,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR3'),
+ 15:
+ dict(
+ name='midlegL4',
+ id=15,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegR4'),
+ 16:
+ dict(
+ name='hindlegL1',
+ id=16,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR1'),
+ 17:
+ dict(
+ name='hindlegL2',
+ id=17,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR2'),
+ 18:
+ dict(
+ name='hindlegL3',
+ id=18,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR3'),
+ 19:
+ dict(
+ name='hindlegL4',
+ id=19,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR4'),
+ 20:
+ dict(
+ name='anttipR',
+ id=20,
+ color=[255, 255, 255],
+ type='',
+ swap='anttipL'),
+ 21:
+ dict(
+ name='antbaseR',
+ id=21,
+ color=[255, 255, 255],
+ type='',
+ swap='antbaseL'),
+ 22:
+ dict(name='eyeR', id=22, color=[255, 255, 255], type='', swap='eyeL'),
+ 23:
+ dict(
+ name='forelegR1',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL1'),
+ 24:
+ dict(
+ name='forelegR2',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL2'),
+ 25:
+ dict(
+ name='forelegR3',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL3'),
+ 26:
+ dict(
+ name='forelegR4',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL4'),
+ 27:
+ dict(
+ name='midlegR1',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL1'),
+ 28:
+ dict(
+ name='midlegR2',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL2'),
+ 29:
+ dict(
+ name='midlegR3',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL3'),
+ 30:
+ dict(
+ name='midlegR4',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='midlegL4'),
+ 31:
+ dict(
+ name='hindlegR1',
+ id=31,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL1'),
+ 32:
+ dict(
+ name='hindlegR2',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL2'),
+ 33:
+ dict(
+ name='hindlegR3',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL3'),
+ 34:
+ dict(
+ name='hindlegR4',
+ id=34,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL4')
+ },
+ skeleton_info={
+ 0: dict(link=('neck', 'head'), id=0, color=[255, 255, 255]),
+ 1: dict(link=('thorax', 'neck'), id=1, color=[255, 255, 255]),
+ 2: dict(link=('abdomen1', 'thorax'), id=2, color=[255, 255, 255]),
+ 3: dict(link=('abdomen2', 'abdomen1'), id=3, color=[255, 255, 255]),
+ 4: dict(link=('antbaseL', 'anttipL'), id=4, color=[255, 255, 255]),
+ 5: dict(link=('eyeL', 'antbaseL'), id=5, color=[255, 255, 255]),
+ 6: dict(link=('forelegL2', 'forelegL1'), id=6, color=[255, 255, 255]),
+ 7: dict(link=('forelegL3', 'forelegL2'), id=7, color=[255, 255, 255]),
+ 8: dict(link=('forelegL4', 'forelegL3'), id=8, color=[255, 255, 255]),
+ 9: dict(link=('midlegL2', 'midlegL1'), id=9, color=[255, 255, 255]),
+ 10: dict(link=('midlegL3', 'midlegL2'), id=10, color=[255, 255, 255]),
+ 11: dict(link=('midlegL4', 'midlegL3'), id=11, color=[255, 255, 255]),
+ 12:
+ dict(link=('hindlegL2', 'hindlegL1'), id=12, color=[255, 255, 255]),
+ 13:
+ dict(link=('hindlegL3', 'hindlegL2'), id=13, color=[255, 255, 255]),
+ 14:
+ dict(link=('hindlegL4', 'hindlegL3'), id=14, color=[255, 255, 255]),
+ 15: dict(link=('antbaseR', 'anttipR'), id=15, color=[255, 255, 255]),
+ 16: dict(link=('eyeR', 'antbaseR'), id=16, color=[255, 255, 255]),
+ 17:
+ dict(link=('forelegR2', 'forelegR1'), id=17, color=[255, 255, 255]),
+ 18:
+ dict(link=('forelegR3', 'forelegR2'), id=18, color=[255, 255, 255]),
+ 19:
+ dict(link=('forelegR4', 'forelegR3'), id=19, color=[255, 255, 255]),
+ 20: dict(link=('midlegR2', 'midlegR1'), id=20, color=[255, 255, 255]),
+ 21: dict(link=('midlegR3', 'midlegR2'), id=21, color=[255, 255, 255]),
+ 22: dict(link=('midlegR4', 'midlegR3'), id=22, color=[255, 255, 255]),
+ 23:
+ dict(link=('hindlegR2', 'hindlegR1'), id=23, color=[255, 255, 255]),
+ 24:
+ dict(link=('hindlegR3', 'hindlegR2'), id=24, color=[255, 255, 255]),
+ 25:
+ dict(link=('hindlegR4', 'hindlegR3'), id=25, color=[255, 255, 255])
+ },
+ joint_weights=[1.] * 35,
+ sigmas=[])
diff --git a/configs/_base_/datasets/macaque.py b/configs/_base_/datasets/macaque.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea8dac297ea2f0e36dabccccc021d953216a6ac8
--- /dev/null
+++ b/configs/_base_/datasets/macaque.py
@@ -0,0 +1,183 @@
+dataset_info = dict(
+ dataset_name='macaque',
+ paper_info=dict(
+ author='Labuguen, Rollyn and Matsumoto, Jumpei and '
+ 'Negrete, Salvador and Nishimaru, Hiroshi and '
+ 'Nishijo, Hisao and Takada, Masahiko and '
+ 'Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro',
+ title='MacaquePose: A novel "in the wild" macaque monkey pose dataset '
+ 'for markerless motion capture',
+ container='bioRxiv',
+ year='2020',
+ homepage='http://www.pri.kyoto-u.ac.jp/datasets/'
+ 'macaquepose/index.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/mhp.py b/configs/_base_/datasets/mhp.py
new file mode 100644
index 0000000000000000000000000000000000000000..e16e37c79cb63c4352c48bb4e45602b8408f534b
--- /dev/null
+++ b/configs/_base_/datasets/mhp.py
@@ -0,0 +1,156 @@
+dataset_info = dict(
+ dataset_name='mhp',
+ paper_info=dict(
+ author='Zhao, Jian and Li, Jianshu and Cheng, Yu and '
+ 'Sim, Terence and Yan, Shuicheng and Feng, Jiashi',
+ title='Understanding humans in crowded scenes: '
+ 'Deep nested adversarial learning and a '
+ 'new benchmark for multi-human parsing',
+ container='Proceedings of the 26th ACM '
+ 'international conference on Multimedia',
+ year='2018',
+ homepage='https://lv-mhp.github.io/dataset',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 1:
+ dict(
+ name='right_knee',
+ id=1,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 2:
+ dict(
+ name='right_hip',
+ id=2,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 3:
+ dict(
+ name='left_hip',
+ id=3,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 4:
+ dict(
+ name='left_knee',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 5:
+ dict(
+ name='left_ankle',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 6:
+ dict(name='pelvis', id=6, color=[51, 153, 255], type='lower', swap=''),
+ 7:
+ dict(name='thorax', id=7, color=[51, 153, 255], type='upper', swap=''),
+ 8:
+ dict(
+ name='upper_neck',
+ id=8,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 9:
+ dict(
+ name='head_top', id=9, color=[51, 153, 255], type='upper',
+ swap=''),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='right_elbow',
+ id=11,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 12:
+ dict(
+ name='right_shoulder',
+ id=12,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 13:
+ dict(
+ name='left_shoulder',
+ id=13,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 14:
+ dict(
+ name='left_elbow',
+ id=14,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 15:
+ dict(
+ name='left_wrist',
+ id=15,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('right_knee', 'right_hip'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('right_hip', 'pelvis'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('pelvis', 'left_hip'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(link=('left_hip', 'left_knee'), id=4, color=[0, 255, 0]),
+ 5:
+ dict(link=('left_knee', 'left_ankle'), id=5, color=[0, 255, 0]),
+ 6:
+ dict(link=('pelvis', 'thorax'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(link=('thorax', 'upper_neck'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('upper_neck', 'head_top'), id=8, color=[51, 153, 255]),
+ 9:
+ dict(link=('upper_neck', 'right_shoulder'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=10, color=[255, 128,
+ 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('upper_neck', 'left_shoulder'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('left_shoulder', 'left_elbow'), id=13, color=[0, 255, 0]),
+ 14:
+ dict(link=('left_elbow', 'left_wrist'), id=14, color=[0, 255, 0])
+ },
+ joint_weights=[
+ 1.5, 1.2, 1., 1., 1.2, 1.5, 1., 1., 1., 1., 1.5, 1.2, 1., 1., 1.2, 1.5
+ ],
+ # Adapted from COCO dataset.
+ sigmas=[
+ 0.089, 0.083, 0.107, 0.107, 0.083, 0.089, 0.026, 0.026, 0.026, 0.026,
+ 0.062, 0.072, 0.179, 0.179, 0.072, 0.062
+ ])
diff --git a/configs/_base_/datasets/mpi_inf_3dhp.py b/configs/_base_/datasets/mpi_inf_3dhp.py
new file mode 100644
index 0000000000000000000000000000000000000000..ffd0a70297b24456ea38566ac205bb585aa47e5d
--- /dev/null
+++ b/configs/_base_/datasets/mpi_inf_3dhp.py
@@ -0,0 +1,132 @@
+dataset_info = dict(
+ dataset_name='mpi_inf_3dhp',
+ paper_info=dict(
+ author='ehta, Dushyant and Rhodin, Helge and Casas, Dan and '
+ 'Fua, Pascal and Sotnychenko, Oleksandr and Xu, Weipeng and '
+ 'Theobalt, Christian',
+ title='Monocular 3D Human Pose Estimation In The Wild Using Improved '
+ 'CNN Supervision',
+ container='2017 international conference on 3D vision (3DV)',
+ year='2017',
+ homepage='http://gvv.mpi-inf.mpg.de/3dhp-dataset',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='head_top', id=0, color=[51, 153, 255], type='upper',
+ swap=''),
+ 1:
+ dict(name='neck', id=1, color=[51, 153, 255], type='upper', swap=''),
+ 2:
+ dict(
+ name='right_shoulder',
+ id=2,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='right_wrist',
+ id=4,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='left_elbow',
+ id=6,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 7:
+ dict(
+ name='left_wrist',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 8:
+ dict(
+ name='right_hip',
+ id=8,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='right_ankle',
+ id=10,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='left_knee',
+ id=12,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 13:
+ dict(
+ name='left_ankle',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 14:
+ dict(name='root', id=14, color=[51, 153, 255], type='lower', swap=''),
+ 15:
+ dict(name='spine', id=15, color=[51, 153, 255], type='upper', swap=''),
+ 16:
+ dict(name='head', id=16, color=[51, 153, 255], type='upper', swap='')
+ },
+ skeleton_info={
+ 0: dict(link=('neck', 'right_shoulder'), id=0, color=[255, 128, 0]),
+ 1: dict(
+ link=('right_shoulder', 'right_elbow'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('right_elbow', 'right_wrist'), id=2, color=[255, 128, 0]),
+ 3: dict(link=('neck', 'left_shoulder'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('left_shoulder', 'left_elbow'), id=4, color=[0, 255, 0]),
+ 5: dict(link=('left_elbow', 'left_wrist'), id=5, color=[0, 255, 0]),
+ 6: dict(link=('root', 'right_hip'), id=6, color=[255, 128, 0]),
+ 7: dict(link=('right_hip', 'right_knee'), id=7, color=[255, 128, 0]),
+ 8: dict(link=('right_knee', 'right_ankle'), id=8, color=[255, 128, 0]),
+ 9: dict(link=('root', 'left_hip'), id=9, color=[0, 255, 0]),
+ 10: dict(link=('left_hip', 'left_knee'), id=10, color=[0, 255, 0]),
+ 11: dict(link=('left_knee', 'left_ankle'), id=11, color=[0, 255, 0]),
+ 12: dict(link=('head_top', 'head'), id=12, color=[51, 153, 255]),
+ 13: dict(link=('head', 'neck'), id=13, color=[51, 153, 255]),
+ 14: dict(link=('neck', 'spine'), id=14, color=[51, 153, 255]),
+ 15: dict(link=('spine', 'root'), id=15, color=[51, 153, 255])
+ },
+ joint_weights=[1.] * 17,
+ sigmas=[])
diff --git a/configs/_base_/datasets/mpii.py b/configs/_base_/datasets/mpii.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c2a491c7b58bc3eaa5c0056d3d7184bdd1d1cc7
--- /dev/null
+++ b/configs/_base_/datasets/mpii.py
@@ -0,0 +1,155 @@
+dataset_info = dict(
+ dataset_name='mpii',
+ paper_info=dict(
+ author='Mykhaylo Andriluka and Leonid Pishchulin and '
+ 'Peter Gehler and Schiele, Bernt',
+ title='2D Human Pose Estimation: New Benchmark and '
+ 'State of the Art Analysis',
+ container='IEEE Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2014',
+ homepage='http://human-pose.mpi-inf.mpg.de/',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 1:
+ dict(
+ name='right_knee',
+ id=1,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 2:
+ dict(
+ name='right_hip',
+ id=2,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 3:
+ dict(
+ name='left_hip',
+ id=3,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 4:
+ dict(
+ name='left_knee',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 5:
+ dict(
+ name='left_ankle',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 6:
+ dict(name='pelvis', id=6, color=[51, 153, 255], type='lower', swap=''),
+ 7:
+ dict(name='thorax', id=7, color=[51, 153, 255], type='upper', swap=''),
+ 8:
+ dict(
+ name='upper_neck',
+ id=8,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 9:
+ dict(
+ name='head_top', id=9, color=[51, 153, 255], type='upper',
+ swap=''),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='right_elbow',
+ id=11,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 12:
+ dict(
+ name='right_shoulder',
+ id=12,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 13:
+ dict(
+ name='left_shoulder',
+ id=13,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 14:
+ dict(
+ name='left_elbow',
+ id=14,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 15:
+ dict(
+ name='left_wrist',
+ id=15,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('right_knee', 'right_hip'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('right_hip', 'pelvis'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('pelvis', 'left_hip'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(link=('left_hip', 'left_knee'), id=4, color=[0, 255, 0]),
+ 5:
+ dict(link=('left_knee', 'left_ankle'), id=5, color=[0, 255, 0]),
+ 6:
+ dict(link=('pelvis', 'thorax'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(link=('thorax', 'upper_neck'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('upper_neck', 'head_top'), id=8, color=[51, 153, 255]),
+ 9:
+ dict(link=('upper_neck', 'right_shoulder'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=10, color=[255, 128,
+ 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('upper_neck', 'left_shoulder'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('left_shoulder', 'left_elbow'), id=13, color=[0, 255, 0]),
+ 14:
+ dict(link=('left_elbow', 'left_wrist'), id=14, color=[0, 255, 0])
+ },
+ joint_weights=[
+ 1.5, 1.2, 1., 1., 1.2, 1.5, 1., 1., 1., 1., 1.5, 1.2, 1., 1., 1.2, 1.5
+ ],
+ # Adapted from COCO dataset.
+ sigmas=[
+ 0.089, 0.083, 0.107, 0.107, 0.083, 0.089, 0.026, 0.026, 0.026, 0.026,
+ 0.062, 0.072, 0.179, 0.179, 0.072, 0.062
+ ])
diff --git a/configs/_base_/datasets/mpii_trb.py b/configs/_base_/datasets/mpii_trb.py
new file mode 100644
index 0000000000000000000000000000000000000000..73940d4b4827f8e08343c3b517360db788e4820d
--- /dev/null
+++ b/configs/_base_/datasets/mpii_trb.py
@@ -0,0 +1,380 @@
+dataset_info = dict(
+ dataset_name='mpii_trb',
+ paper_info=dict(
+ author='Duan, Haodong and Lin, Kwan-Yee and Jin, Sheng and '
+ 'Liu, Wentao and Qian, Chen and Ouyang, Wanli',
+ title='TRB: A Novel Triplet Representation for '
+ 'Understanding 2D Human Body',
+ container='Proceedings of the IEEE International '
+ 'Conference on Computer Vision',
+ year='2019',
+ homepage='https://github.com/kennymckormick/'
+ 'Triplet-Representation-of-human-Body',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='left_shoulder',
+ id=0,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 1:
+ dict(
+ name='right_shoulder',
+ id=1,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 2:
+ dict(
+ name='left_elbow',
+ id=2,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 3:
+ dict(
+ name='right_elbow',
+ id=3,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 4:
+ dict(
+ name='left_wrist',
+ id=4,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 5:
+ dict(
+ name='right_wrist',
+ id=5,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 6:
+ dict(
+ name='left_hip',
+ id=6,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 7:
+ dict(
+ name='right_hip',
+ id=7,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 8:
+ dict(
+ name='left_knee',
+ id=8,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 9:
+ dict(
+ name='right_knee',
+ id=9,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 10:
+ dict(
+ name='left_ankle',
+ id=10,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 11:
+ dict(
+ name='right_ankle',
+ id=11,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 12:
+ dict(name='head', id=12, color=[51, 153, 255], type='upper', swap=''),
+ 13:
+ dict(name='neck', id=13, color=[51, 153, 255], type='upper', swap=''),
+ 14:
+ dict(
+ name='right_neck',
+ id=14,
+ color=[255, 255, 255],
+ type='upper',
+ swap='left_neck'),
+ 15:
+ dict(
+ name='left_neck',
+ id=15,
+ color=[255, 255, 255],
+ type='upper',
+ swap='right_neck'),
+ 16:
+ dict(
+ name='medial_right_shoulder',
+ id=16,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_left_shoulder'),
+ 17:
+ dict(
+ name='lateral_right_shoulder',
+ id=17,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_left_shoulder'),
+ 18:
+ dict(
+ name='medial_right_bow',
+ id=18,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_left_bow'),
+ 19:
+ dict(
+ name='lateral_right_bow',
+ id=19,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_left_bow'),
+ 20:
+ dict(
+ name='medial_right_wrist',
+ id=20,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_left_wrist'),
+ 21:
+ dict(
+ name='lateral_right_wrist',
+ id=21,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_left_wrist'),
+ 22:
+ dict(
+ name='medial_left_shoulder',
+ id=22,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_right_shoulder'),
+ 23:
+ dict(
+ name='lateral_left_shoulder',
+ id=23,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_right_shoulder'),
+ 24:
+ dict(
+ name='medial_left_bow',
+ id=24,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_right_bow'),
+ 25:
+ dict(
+ name='lateral_left_bow',
+ id=25,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_right_bow'),
+ 26:
+ dict(
+ name='medial_left_wrist',
+ id=26,
+ color=[255, 255, 255],
+ type='upper',
+ swap='medial_right_wrist'),
+ 27:
+ dict(
+ name='lateral_left_wrist',
+ id=27,
+ color=[255, 255, 255],
+ type='upper',
+ swap='lateral_right_wrist'),
+ 28:
+ dict(
+ name='medial_right_hip',
+ id=28,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_left_hip'),
+ 29:
+ dict(
+ name='lateral_right_hip',
+ id=29,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_left_hip'),
+ 30:
+ dict(
+ name='medial_right_knee',
+ id=30,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_left_knee'),
+ 31:
+ dict(
+ name='lateral_right_knee',
+ id=31,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_left_knee'),
+ 32:
+ dict(
+ name='medial_right_ankle',
+ id=32,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_left_ankle'),
+ 33:
+ dict(
+ name='lateral_right_ankle',
+ id=33,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_left_ankle'),
+ 34:
+ dict(
+ name='medial_left_hip',
+ id=34,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_right_hip'),
+ 35:
+ dict(
+ name='lateral_left_hip',
+ id=35,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_right_hip'),
+ 36:
+ dict(
+ name='medial_left_knee',
+ id=36,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_right_knee'),
+ 37:
+ dict(
+ name='lateral_left_knee',
+ id=37,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_right_knee'),
+ 38:
+ dict(
+ name='medial_left_ankle',
+ id=38,
+ color=[255, 255, 255],
+ type='lower',
+ swap='medial_right_ankle'),
+ 39:
+ dict(
+ name='lateral_left_ankle',
+ id=39,
+ color=[255, 255, 255],
+ type='lower',
+ swap='lateral_right_ankle'),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('head', 'neck'), id=0, color=[51, 153, 255]),
+ 1:
+ dict(link=('neck', 'left_shoulder'), id=1, color=[51, 153, 255]),
+ 2:
+ dict(link=('neck', 'right_shoulder'), id=2, color=[51, 153, 255]),
+ 3:
+ dict(link=('left_shoulder', 'left_elbow'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=4, color=[255, 128, 0]),
+ 5:
+ dict(link=('left_elbow', 'left_wrist'), id=5, color=[0, 255, 0]),
+ 6:
+ dict(link=('right_elbow', 'right_wrist'), id=6, color=[255, 128, 0]),
+ 7:
+ dict(link=('left_shoulder', 'left_hip'), id=7, color=[51, 153, 255]),
+ 8:
+ dict(link=('right_shoulder', 'right_hip'), id=8, color=[51, 153, 255]),
+ 9:
+ dict(link=('left_hip', 'right_hip'), id=9, color=[51, 153, 255]),
+ 10:
+ dict(link=('left_hip', 'left_knee'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_hip', 'right_knee'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_knee', 'left_ankle'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('right_knee', 'right_ankle'), id=13, color=[255, 128, 0]),
+ 14:
+ dict(link=('right_neck', 'left_neck'), id=14, color=[255, 255, 255]),
+ 15:
+ dict(
+ link=('medial_right_shoulder', 'lateral_right_shoulder'),
+ id=15,
+ color=[255, 255, 255]),
+ 16:
+ dict(
+ link=('medial_right_bow', 'lateral_right_bow'),
+ id=16,
+ color=[255, 255, 255]),
+ 17:
+ dict(
+ link=('medial_right_wrist', 'lateral_right_wrist'),
+ id=17,
+ color=[255, 255, 255]),
+ 18:
+ dict(
+ link=('medial_left_shoulder', 'lateral_left_shoulder'),
+ id=18,
+ color=[255, 255, 255]),
+ 19:
+ dict(
+ link=('medial_left_bow', 'lateral_left_bow'),
+ id=19,
+ color=[255, 255, 255]),
+ 20:
+ dict(
+ link=('medial_left_wrist', 'lateral_left_wrist'),
+ id=20,
+ color=[255, 255, 255]),
+ 21:
+ dict(
+ link=('medial_right_hip', 'lateral_right_hip'),
+ id=21,
+ color=[255, 255, 255]),
+ 22:
+ dict(
+ link=('medial_right_knee', 'lateral_right_knee'),
+ id=22,
+ color=[255, 255, 255]),
+ 23:
+ dict(
+ link=('medial_right_ankle', 'lateral_right_ankle'),
+ id=23,
+ color=[255, 255, 255]),
+ 24:
+ dict(
+ link=('medial_left_hip', 'lateral_left_hip'),
+ id=24,
+ color=[255, 255, 255]),
+ 25:
+ dict(
+ link=('medial_left_knee', 'lateral_left_knee'),
+ id=25,
+ color=[255, 255, 255]),
+ 26:
+ dict(
+ link=('medial_left_ankle', 'lateral_left_ankle'),
+ id=26,
+ color=[255, 255, 255])
+ },
+ joint_weights=[1.] * 40,
+ sigmas=[])
diff --git a/configs/_base_/datasets/ochuman.py b/configs/_base_/datasets/ochuman.py
new file mode 100644
index 0000000000000000000000000000000000000000..2ef20838fe583fde133a97e688d30e91ae562746
--- /dev/null
+++ b/configs/_base_/datasets/ochuman.py
@@ -0,0 +1,181 @@
+dataset_info = dict(
+ dataset_name='ochuman',
+ paper_info=dict(
+ author='Zhang, Song-Hai and Li, Ruilong and Dong, Xin and '
+ 'Rosin, Paul and Cai, Zixi and Han, Xi and '
+ 'Yang, Dingcheng and Huang, Haozhi and Hu, Shi-Min',
+ title='Pose2seg: Detection free human instance segmentation',
+ container='Proceedings of the IEEE conference on computer '
+ 'vision and pattern recognition',
+ year='2019',
+ homepage='https://github.com/liruilong940607/OCHumanApi',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/onehand10k.py b/configs/_base_/datasets/onehand10k.py
new file mode 100644
index 0000000000000000000000000000000000000000..016770f14f3075dfa7d59389524a0c11a4feb802
--- /dev/null
+++ b/configs/_base_/datasets/onehand10k.py
@@ -0,0 +1,142 @@
+dataset_info = dict(
+ dataset_name='onehand10k',
+ paper_info=dict(
+ author='Wang, Yangang and Peng, Cong and Liu, Yebin',
+ title='Mask-pose cascaded cnn for 2d hand pose estimation '
+ 'from single color image',
+ container='IEEE Transactions on Circuits and Systems '
+ 'for Video Technology',
+ year='2018',
+ homepage='https://www.yangangwang.com/papers/WANG-MCC-2018-10.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='wrist', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='thumb1', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb2', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb3', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(name='thumb4', id=4, color=[255, 128, 0], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger1', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger2', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger3', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='forefinger4', id=8, color=[255, 153, 255], type='', swap=''),
+ 9:
+ dict(
+ name='middle_finger1',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger3',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='middle_finger4',
+ id=12,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 13:
+ dict(
+ name='ring_finger1', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger2', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger3', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(
+ name='ring_finger4', id=16, color=[255, 51, 51], type='', swap=''),
+ 17:
+ dict(name='pinky_finger1', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger2', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger3', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='pinky_finger4', id=20, color=[0, 255, 0], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[])
diff --git a/configs/_base_/datasets/panoptic_body3d.py b/configs/_base_/datasets/panoptic_body3d.py
new file mode 100644
index 0000000000000000000000000000000000000000..e3b19ac462415a840ca2e0b9e214bdb35d91b5e4
--- /dev/null
+++ b/configs/_base_/datasets/panoptic_body3d.py
@@ -0,0 +1,160 @@
+dataset_info = dict(
+ dataset_name='panoptic_pose_3d',
+ paper_info=dict(
+ author='Joo, Hanbyul and Simon, Tomas and Li, Xulong'
+ 'and Liu, Hao and Tan, Lei and Gui, Lin and Banerjee, Sean'
+ 'and Godisart, Timothy and Nabbe, Bart and Matthews, Iain'
+ 'and Kanade, Takeo and Nobuhara, Shohei and Sheikh, Yaser',
+ title='Panoptic Studio: A Massively Multiview System '
+ 'for Interaction Motion Capture',
+ container='IEEE Transactions on Pattern Analysis'
+ ' and Machine Intelligence',
+ year='2017',
+ homepage='http://domedb.perception.cs.cmu.edu',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='neck', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(name='nose', id=1, color=[51, 153, 255], type='upper', swap=''),
+ 2:
+ dict(name='mid_hip', id=2, color=[0, 255, 0], type='lower', swap=''),
+ 3:
+ dict(
+ name='left_shoulder',
+ id=3,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 4:
+ dict(
+ name='left_elbow',
+ id=4,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 5:
+ dict(
+ name='left_wrist',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 6:
+ dict(
+ name='left_hip',
+ id=6,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 7:
+ dict(
+ name='left_knee',
+ id=7,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 8:
+ dict(
+ name='left_ankle',
+ id=8,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 9:
+ dict(
+ name='right_shoulder',
+ id=9,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 10:
+ dict(
+ name='right_elbow',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 11:
+ dict(
+ name='right_wrist',
+ id=11,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='right_knee',
+ id=13,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 14:
+ dict(
+ name='right_ankle',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 15:
+ dict(
+ name='left_eye',
+ id=15,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 16:
+ dict(
+ name='left_ear',
+ id=16,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 17:
+ dict(
+ name='right_eye',
+ id=17,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 18:
+ dict(
+ name='right_ear',
+ id=18,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear')
+ },
+ skeleton_info={
+ 0: dict(link=('nose', 'neck'), id=0, color=[51, 153, 255]),
+ 1: dict(link=('neck', 'left_shoulder'), id=1, color=[0, 255, 0]),
+ 2: dict(link=('neck', 'right_shoulder'), id=2, color=[255, 128, 0]),
+ 3: dict(link=('left_shoulder', 'left_elbow'), id=3, color=[0, 255, 0]),
+ 4: dict(
+ link=('right_shoulder', 'right_elbow'), id=4, color=[255, 128, 0]),
+ 5: dict(link=('left_elbow', 'left_wrist'), id=5, color=[0, 255, 0]),
+ 6:
+ dict(link=('right_elbow', 'right_wrist'), id=6, color=[255, 128, 0]),
+ 7: dict(link=('left_ankle', 'left_knee'), id=7, color=[0, 255, 0]),
+ 8: dict(link=('left_knee', 'left_hip'), id=8, color=[0, 255, 0]),
+ 9: dict(link=('right_ankle', 'right_knee'), id=9, color=[255, 128, 0]),
+ 10: dict(link=('right_knee', 'right_hip'), id=10, color=[255, 128, 0]),
+ 11: dict(link=('mid_hip', 'left_hip'), id=11, color=[0, 255, 0]),
+ 12: dict(link=('mid_hip', 'right_hip'), id=12, color=[255, 128, 0]),
+ 13: dict(link=('mid_hip', 'neck'), id=13, color=[51, 153, 255]),
+ },
+ joint_weights=[
+ 1.0, 1.0, 1.0, 1.0, 1.2, 1.5, 1.0, 1.2, 1.5, 1.0, 1.2, 1.5, 1.0, 1.2,
+ 1.5, 1.0, 1.0, 1.0, 1.0
+ ],
+ sigmas=[
+ 0.026, 0.026, 0.107, 0.079, 0.072, 0.062, 0.107, 0.087, 0.089, 0.079,
+ 0.072, 0.062, 0.107, 0.087, 0.089, 0.025, 0.035, 0.025, 0.035
+ ])
diff --git a/configs/_base_/datasets/panoptic_hand2d.py b/configs/_base_/datasets/panoptic_hand2d.py
new file mode 100644
index 0000000000000000000000000000000000000000..7a65731ba87b155beb1b40591fd9acb232c2afc6
--- /dev/null
+++ b/configs/_base_/datasets/panoptic_hand2d.py
@@ -0,0 +1,143 @@
+dataset_info = dict(
+ dataset_name='panoptic_hand2d',
+ paper_info=dict(
+ author='Simon, Tomas and Joo, Hanbyul and '
+ 'Matthews, Iain and Sheikh, Yaser',
+ title='Hand keypoint detection in single images using '
+ 'multiview bootstrapping',
+ container='Proceedings of the IEEE conference on '
+ 'Computer Vision and Pattern Recognition',
+ year='2017',
+ homepage='http://domedb.perception.cs.cmu.edu/handdb.html',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='wrist', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='thumb1', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb2', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb3', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(name='thumb4', id=4, color=[255, 128, 0], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger1', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger2', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger3', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='forefinger4', id=8, color=[255, 153, 255], type='', swap=''),
+ 9:
+ dict(
+ name='middle_finger1',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger2',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger3',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='middle_finger4',
+ id=12,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 13:
+ dict(
+ name='ring_finger1', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger2', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger3', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(
+ name='ring_finger4', id=16, color=[255, 51, 51], type='', swap=''),
+ 17:
+ dict(name='pinky_finger1', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger2', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger3', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='pinky_finger4', id=20, color=[0, 255, 0], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[])
diff --git a/configs/_base_/datasets/posetrack18.py b/configs/_base_/datasets/posetrack18.py
new file mode 100644
index 0000000000000000000000000000000000000000..5aefd1c97fe083df35ee88bebab4f99134c27971
--- /dev/null
+++ b/configs/_base_/datasets/posetrack18.py
@@ -0,0 +1,176 @@
+dataset_info = dict(
+ dataset_name='posetrack18',
+ paper_info=dict(
+ author='Andriluka, Mykhaylo and Iqbal, Umar and '
+ 'Insafutdinov, Eldar and Pishchulin, Leonid and '
+ 'Milan, Anton and Gall, Juergen and Schiele, Bernt',
+ title='Posetrack: A benchmark for human pose estimation and tracking',
+ container='Proceedings of the IEEE Conference on '
+ 'Computer Vision and Pattern Recognition',
+ year='2018',
+ homepage='https://posetrack.net/users/download.php',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='head_bottom',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 2:
+ dict(
+ name='head_top', id=2, color=[51, 153, 255], type='upper',
+ swap=''),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('nose', 'head_bottom'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'head_top'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(
+ link=('head_bottom', 'left_shoulder'), id=14, color=[51, 153,
+ 255]),
+ 15:
+ dict(
+ link=('head_bottom', 'right_shoulder'),
+ id=15,
+ color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
diff --git a/configs/_base_/datasets/rhd2d.py b/configs/_base_/datasets/rhd2d.py
new file mode 100644
index 0000000000000000000000000000000000000000..4631ccd03814155b06687e0b1ba2b83404c837fc
--- /dev/null
+++ b/configs/_base_/datasets/rhd2d.py
@@ -0,0 +1,151 @@
+dataset_info = dict(
+ dataset_name='rhd2d',
+ paper_info=dict(
+ author='Christian Zimmermann and Thomas Brox',
+ title='Learning to Estimate 3D Hand Pose from Single RGB Images',
+ container='arXiv',
+ year='2017',
+ homepage='https://lmb.informatik.uni-freiburg.de/resources/'
+ 'datasets/RenderedHandposeDataset.en.html',
+ ),
+ # In RHD, 1-4: left thumb [tip to palm], which means the finger is from
+ # tip to palm, so as other fingers. Please refer to
+ # `https://lmb.informatik.uni-freiburg.de/resources/datasets/
+ # RenderedHandpose/README` for details of keypoint definition.
+ # But in COCO-WholeBody-Hand, FreiHand, CMU Panoptic HandDB, it is in
+ # inverse order. Pay attention to this if you want to combine RHD with
+ # other hand datasets to train a single model.
+ # Also, note that 'keypoint_info' will not directly affect the order of
+ # the keypoint in the dataset. It is mostly for visualization & storing
+ # information about flip_pairs.
+ keypoint_info={
+ 0:
+ dict(name='wrist', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='thumb4', id=1, color=[255, 128, 0], type='', swap=''),
+ 2:
+ dict(name='thumb3', id=2, color=[255, 128, 0], type='', swap=''),
+ 3:
+ dict(name='thumb2', id=3, color=[255, 128, 0], type='', swap=''),
+ 4:
+ dict(name='thumb1', id=4, color=[255, 128, 0], type='', swap=''),
+ 5:
+ dict(
+ name='forefinger4', id=5, color=[255, 153, 255], type='', swap=''),
+ 6:
+ dict(
+ name='forefinger3', id=6, color=[255, 153, 255], type='', swap=''),
+ 7:
+ dict(
+ name='forefinger2', id=7, color=[255, 153, 255], type='', swap=''),
+ 8:
+ dict(
+ name='forefinger1', id=8, color=[255, 153, 255], type='', swap=''),
+ 9:
+ dict(
+ name='middle_finger4',
+ id=9,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 10:
+ dict(
+ name='middle_finger3',
+ id=10,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 11:
+ dict(
+ name='middle_finger2',
+ id=11,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 12:
+ dict(
+ name='middle_finger1',
+ id=12,
+ color=[102, 178, 255],
+ type='',
+ swap=''),
+ 13:
+ dict(
+ name='ring_finger4', id=13, color=[255, 51, 51], type='', swap=''),
+ 14:
+ dict(
+ name='ring_finger3', id=14, color=[255, 51, 51], type='', swap=''),
+ 15:
+ dict(
+ name='ring_finger2', id=15, color=[255, 51, 51], type='', swap=''),
+ 16:
+ dict(
+ name='ring_finger1', id=16, color=[255, 51, 51], type='', swap=''),
+ 17:
+ dict(name='pinky_finger4', id=17, color=[0, 255, 0], type='', swap=''),
+ 18:
+ dict(name='pinky_finger3', id=18, color=[0, 255, 0], type='', swap=''),
+ 19:
+ dict(name='pinky_finger2', id=19, color=[0, 255, 0], type='', swap=''),
+ 20:
+ dict(name='pinky_finger1', id=20, color=[0, 255, 0], type='', swap='')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('wrist', 'thumb1'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('thumb1', 'thumb2'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('thumb2', 'thumb3'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('thumb3', 'thumb4'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('wrist', 'forefinger1'), id=4, color=[255, 153, 255]),
+ 5:
+ dict(link=('forefinger1', 'forefinger2'), id=5, color=[255, 153, 255]),
+ 6:
+ dict(link=('forefinger2', 'forefinger3'), id=6, color=[255, 153, 255]),
+ 7:
+ dict(link=('forefinger3', 'forefinger4'), id=7, color=[255, 153, 255]),
+ 8:
+ dict(link=('wrist', 'middle_finger1'), id=8, color=[102, 178, 255]),
+ 9:
+ dict(
+ link=('middle_finger1', 'middle_finger2'),
+ id=9,
+ color=[102, 178, 255]),
+ 10:
+ dict(
+ link=('middle_finger2', 'middle_finger3'),
+ id=10,
+ color=[102, 178, 255]),
+ 11:
+ dict(
+ link=('middle_finger3', 'middle_finger4'),
+ id=11,
+ color=[102, 178, 255]),
+ 12:
+ dict(link=('wrist', 'ring_finger1'), id=12, color=[255, 51, 51]),
+ 13:
+ dict(
+ link=('ring_finger1', 'ring_finger2'), id=13, color=[255, 51, 51]),
+ 14:
+ dict(
+ link=('ring_finger2', 'ring_finger3'), id=14, color=[255, 51, 51]),
+ 15:
+ dict(
+ link=('ring_finger3', 'ring_finger4'), id=15, color=[255, 51, 51]),
+ 16:
+ dict(link=('wrist', 'pinky_finger1'), id=16, color=[0, 255, 0]),
+ 17:
+ dict(
+ link=('pinky_finger1', 'pinky_finger2'), id=17, color=[0, 255, 0]),
+ 18:
+ dict(
+ link=('pinky_finger2', 'pinky_finger3'), id=18, color=[0, 255, 0]),
+ 19:
+ dict(
+ link=('pinky_finger3', 'pinky_finger4'), id=19, color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 21,
+ sigmas=[])
diff --git a/configs/_base_/datasets/shelf.py b/configs/_base_/datasets/shelf.py
new file mode 100644
index 0000000000000000000000000000000000000000..5fe6e42b3b44e3f65947284efd9ffac58d41d43f
--- /dev/null
+++ b/configs/_base_/datasets/shelf.py
@@ -0,0 +1,151 @@
+dataset_info = dict(
+ dataset_name='shelf',
+ paper_info=dict(
+ author='Belagiannis, Vasileios and Amin, Sikandar and Andriluka, '
+ 'Mykhaylo and Schiele, Bernt and Navab, Nassir and Ilic, Slobodan',
+ title='3D Pictorial Structures for Multiple Human Pose Estimation',
+ container='IEEE Computer Society Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2014',
+ homepage='http://campar.in.tum.de/Chair/MultiHumanPose',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 1:
+ dict(
+ name='right_knee',
+ id=1,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 2:
+ dict(
+ name='right_hip',
+ id=2,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 3:
+ dict(
+ name='left_hip',
+ id=3,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 4:
+ dict(
+ name='left_knee',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 5:
+ dict(
+ name='left_ankle',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 6:
+ dict(
+ name='right_wrist',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 7:
+ dict(
+ name='right_elbow',
+ id=7,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 8:
+ dict(
+ name='right_shoulder',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 9:
+ dict(
+ name='left_shoulder',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 10:
+ dict(
+ name='left_elbow',
+ id=10,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 11:
+ dict(
+ name='left_wrist',
+ id=11,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 12:
+ dict(
+ name='bottom_head',
+ id=12,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ 13:
+ dict(
+ name='top_head',
+ id=13,
+ color=[51, 153, 255],
+ type='upper',
+ swap=''),
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ 1:
+ dict(link=('right_knee', 'right_hip'), id=1, color=[255, 128, 0]),
+ 2:
+ dict(link=('left_hip', 'left_knee'), id=2, color=[0, 255, 0]),
+ 3:
+ dict(link=('left_knee', 'left_ankle'), id=3, color=[0, 255, 0]),
+ 4:
+ dict(link=('right_hip', 'left_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('right_wrist', 'right_elbow'), id=5, color=[255, 128, 0]),
+ 6:
+ dict(
+ link=('right_elbow', 'right_shoulder'), id=6, color=[255, 128, 0]),
+ 7:
+ dict(link=('left_shoulder', 'left_elbow'), id=7, color=[0, 255, 0]),
+ 8:
+ dict(link=('left_elbow', 'left_wrist'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(link=('right_hip', 'right_shoulder'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_hip', 'left_shoulder'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(
+ link=('right_shoulder', 'bottom_head'), id=11, color=[255, 128,
+ 0]),
+ 12:
+ dict(link=('left_shoulder', 'bottom_head'), id=12, color=[0, 255, 0]),
+ 13:
+ dict(link=('bottom_head', 'top_head'), id=13, color=[51, 153, 255]),
+ },
+ joint_weights=[
+ 1.5, 1.2, 1.0, 1.0, 1.2, 1.5, 1.5, 1.2, 1.0, 1.0, 1.2, 1.5, 1.0, 1.0
+ ],
+ sigmas=[
+ 0.089, 0.087, 0.107, 0.107, 0.087, 0.089, 0.062, 0.072, 0.079, 0.079,
+ 0.072, 0.062, 0.026, 0.026
+ ])
diff --git a/configs/_base_/datasets/ubody2d.py b/configs/_base_/datasets/ubody2d.py
new file mode 100644
index 0000000000000000000000000000000000000000..8486db05ab3cf961da15eb5e15ed570d27c3cb09
--- /dev/null
+++ b/configs/_base_/datasets/ubody2d.py
@@ -0,0 +1,1153 @@
+dataset_info = dict(
+ dataset_name='ubody2d',
+ paper_info=dict(
+ author='Jing Lin, Ailing Zeng, Haoqian Wang, Lei Zhang, Yu Li',
+ title='One-Stage 3D Whole-Body Mesh Recovery with Component Aware'
+ 'Transformer',
+ container='IEEE Computer Society Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2023',
+ homepage='https://github.com/IDEA-Research/OSX',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ 2:
+ dict(
+ name='right_eye',
+ id=2,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_eye'),
+ 3:
+ dict(
+ name='left_ear',
+ id=3,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_ear'),
+ 4:
+ dict(
+ name='right_ear',
+ id=4,
+ color=[51, 153, 255],
+ type='upper',
+ swap='left_ear'),
+ 5:
+ dict(
+ name='left_shoulder',
+ id=5,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_shoulder'),
+ 6:
+ dict(
+ name='right_shoulder',
+ id=6,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_shoulder'),
+ 7:
+ dict(
+ name='left_elbow',
+ id=7,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_elbow'),
+ 8:
+ dict(
+ name='right_elbow',
+ id=8,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_elbow'),
+ 9:
+ dict(
+ name='left_wrist',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='right_wrist'),
+ 10:
+ dict(
+ name='right_wrist',
+ id=10,
+ color=[255, 128, 0],
+ type='upper',
+ swap='left_wrist'),
+ 11:
+ dict(
+ name='left_hip',
+ id=11,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_hip'),
+ 12:
+ dict(
+ name='right_hip',
+ id=12,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_hip'),
+ 13:
+ dict(
+ name='left_knee',
+ id=13,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_knee'),
+ 14:
+ dict(
+ name='right_knee',
+ id=14,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_knee'),
+ 15:
+ dict(
+ name='left_ankle',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='right_ankle'),
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ 17:
+ dict(
+ name='left_big_toe',
+ id=17,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_big_toe'),
+ 18:
+ dict(
+ name='left_small_toe',
+ id=18,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_small_toe'),
+ 19:
+ dict(
+ name='left_heel',
+ id=19,
+ color=[255, 128, 0],
+ type='lower',
+ swap='right_heel'),
+ 20:
+ dict(
+ name='right_big_toe',
+ id=20,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_big_toe'),
+ 21:
+ dict(
+ name='right_small_toe',
+ id=21,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_small_toe'),
+ 22:
+ dict(
+ name='right_heel',
+ id=22,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_heel'),
+ 23:
+ dict(
+ name='face-0',
+ id=23,
+ color=[255, 255, 255],
+ type='',
+ swap='face-16'),
+ 24:
+ dict(
+ name='face-1',
+ id=24,
+ color=[255, 255, 255],
+ type='',
+ swap='face-15'),
+ 25:
+ dict(
+ name='face-2',
+ id=25,
+ color=[255, 255, 255],
+ type='',
+ swap='face-14'),
+ 26:
+ dict(
+ name='face-3',
+ id=26,
+ color=[255, 255, 255],
+ type='',
+ swap='face-13'),
+ 27:
+ dict(
+ name='face-4',
+ id=27,
+ color=[255, 255, 255],
+ type='',
+ swap='face-12'),
+ 28:
+ dict(
+ name='face-5',
+ id=28,
+ color=[255, 255, 255],
+ type='',
+ swap='face-11'),
+ 29:
+ dict(
+ name='face-6',
+ id=29,
+ color=[255, 255, 255],
+ type='',
+ swap='face-10'),
+ 30:
+ dict(
+ name='face-7',
+ id=30,
+ color=[255, 255, 255],
+ type='',
+ swap='face-9'),
+ 31:
+ dict(name='face-8', id=31, color=[255, 255, 255], type='', swap=''),
+ 32:
+ dict(
+ name='face-9',
+ id=32,
+ color=[255, 255, 255],
+ type='',
+ swap='face-7'),
+ 33:
+ dict(
+ name='face-10',
+ id=33,
+ color=[255, 255, 255],
+ type='',
+ swap='face-6'),
+ 34:
+ dict(
+ name='face-11',
+ id=34,
+ color=[255, 255, 255],
+ type='',
+ swap='face-5'),
+ 35:
+ dict(
+ name='face-12',
+ id=35,
+ color=[255, 255, 255],
+ type='',
+ swap='face-4'),
+ 36:
+ dict(
+ name='face-13',
+ id=36,
+ color=[255, 255, 255],
+ type='',
+ swap='face-3'),
+ 37:
+ dict(
+ name='face-14',
+ id=37,
+ color=[255, 255, 255],
+ type='',
+ swap='face-2'),
+ 38:
+ dict(
+ name='face-15',
+ id=38,
+ color=[255, 255, 255],
+ type='',
+ swap='face-1'),
+ 39:
+ dict(
+ name='face-16',
+ id=39,
+ color=[255, 255, 255],
+ type='',
+ swap='face-0'),
+ 40:
+ dict(
+ name='face-17',
+ id=40,
+ color=[255, 255, 255],
+ type='',
+ swap='face-26'),
+ 41:
+ dict(
+ name='face-18',
+ id=41,
+ color=[255, 255, 255],
+ type='',
+ swap='face-25'),
+ 42:
+ dict(
+ name='face-19',
+ id=42,
+ color=[255, 255, 255],
+ type='',
+ swap='face-24'),
+ 43:
+ dict(
+ name='face-20',
+ id=43,
+ color=[255, 255, 255],
+ type='',
+ swap='face-23'),
+ 44:
+ dict(
+ name='face-21',
+ id=44,
+ color=[255, 255, 255],
+ type='',
+ swap='face-22'),
+ 45:
+ dict(
+ name='face-22',
+ id=45,
+ color=[255, 255, 255],
+ type='',
+ swap='face-21'),
+ 46:
+ dict(
+ name='face-23',
+ id=46,
+ color=[255, 255, 255],
+ type='',
+ swap='face-20'),
+ 47:
+ dict(
+ name='face-24',
+ id=47,
+ color=[255, 255, 255],
+ type='',
+ swap='face-19'),
+ 48:
+ dict(
+ name='face-25',
+ id=48,
+ color=[255, 255, 255],
+ type='',
+ swap='face-18'),
+ 49:
+ dict(
+ name='face-26',
+ id=49,
+ color=[255, 255, 255],
+ type='',
+ swap='face-17'),
+ 50:
+ dict(name='face-27', id=50, color=[255, 255, 255], type='', swap=''),
+ 51:
+ dict(name='face-28', id=51, color=[255, 255, 255], type='', swap=''),
+ 52:
+ dict(name='face-29', id=52, color=[255, 255, 255], type='', swap=''),
+ 53:
+ dict(name='face-30', id=53, color=[255, 255, 255], type='', swap=''),
+ 54:
+ dict(
+ name='face-31',
+ id=54,
+ color=[255, 255, 255],
+ type='',
+ swap='face-35'),
+ 55:
+ dict(
+ name='face-32',
+ id=55,
+ color=[255, 255, 255],
+ type='',
+ swap='face-34'),
+ 56:
+ dict(name='face-33', id=56, color=[255, 255, 255], type='', swap=''),
+ 57:
+ dict(
+ name='face-34',
+ id=57,
+ color=[255, 255, 255],
+ type='',
+ swap='face-32'),
+ 58:
+ dict(
+ name='face-35',
+ id=58,
+ color=[255, 255, 255],
+ type='',
+ swap='face-31'),
+ 59:
+ dict(
+ name='face-36',
+ id=59,
+ color=[255, 255, 255],
+ type='',
+ swap='face-45'),
+ 60:
+ dict(
+ name='face-37',
+ id=60,
+ color=[255, 255, 255],
+ type='',
+ swap='face-44'),
+ 61:
+ dict(
+ name='face-38',
+ id=61,
+ color=[255, 255, 255],
+ type='',
+ swap='face-43'),
+ 62:
+ dict(
+ name='face-39',
+ id=62,
+ color=[255, 255, 255],
+ type='',
+ swap='face-42'),
+ 63:
+ dict(
+ name='face-40',
+ id=63,
+ color=[255, 255, 255],
+ type='',
+ swap='face-47'),
+ 64:
+ dict(
+ name='face-41',
+ id=64,
+ color=[255, 255, 255],
+ type='',
+ swap='face-46'),
+ 65:
+ dict(
+ name='face-42',
+ id=65,
+ color=[255, 255, 255],
+ type='',
+ swap='face-39'),
+ 66:
+ dict(
+ name='face-43',
+ id=66,
+ color=[255, 255, 255],
+ type='',
+ swap='face-38'),
+ 67:
+ dict(
+ name='face-44',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='face-37'),
+ 68:
+ dict(
+ name='face-45',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='face-36'),
+ 69:
+ dict(
+ name='face-46',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='face-41'),
+ 70:
+ dict(
+ name='face-47',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='face-40'),
+ 71:
+ dict(
+ name='face-48',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='face-54'),
+ 72:
+ dict(
+ name='face-49',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='face-53'),
+ 73:
+ dict(
+ name='face-50',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='face-52'),
+ 74:
+ dict(name='face-51', id=74, color=[255, 255, 255], type='', swap=''),
+ 75:
+ dict(
+ name='face-52',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='face-50'),
+ 76:
+ dict(
+ name='face-53',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='face-49'),
+ 77:
+ dict(
+ name='face-54',
+ id=77,
+ color=[255, 255, 255],
+ type='',
+ swap='face-48'),
+ 78:
+ dict(
+ name='face-55',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='face-59'),
+ 79:
+ dict(
+ name='face-56',
+ id=79,
+ color=[255, 255, 255],
+ type='',
+ swap='face-58'),
+ 80:
+ dict(name='face-57', id=80, color=[255, 255, 255], type='', swap=''),
+ 81:
+ dict(
+ name='face-58',
+ id=81,
+ color=[255, 255, 255],
+ type='',
+ swap='face-56'),
+ 82:
+ dict(
+ name='face-59',
+ id=82,
+ color=[255, 255, 255],
+ type='',
+ swap='face-55'),
+ 83:
+ dict(
+ name='face-60',
+ id=83,
+ color=[255, 255, 255],
+ type='',
+ swap='face-64'),
+ 84:
+ dict(
+ name='face-61',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='face-63'),
+ 85:
+ dict(name='face-62', id=85, color=[255, 255, 255], type='', swap=''),
+ 86:
+ dict(
+ name='face-63',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='face-61'),
+ 87:
+ dict(
+ name='face-64',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='face-60'),
+ 88:
+ dict(
+ name='face-65',
+ id=88,
+ color=[255, 255, 255],
+ type='',
+ swap='face-67'),
+ 89:
+ dict(name='face-66', id=89, color=[255, 255, 255], type='', swap=''),
+ 90:
+ dict(
+ name='face-67',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='face-65'),
+ 91:
+ dict(
+ name='left_hand_root',
+ id=91,
+ color=[255, 255, 255],
+ type='',
+ swap='right_hand_root'),
+ 92:
+ dict(
+ name='left_thumb1',
+ id=92,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb1'),
+ 93:
+ dict(
+ name='left_thumb2',
+ id=93,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb2'),
+ 94:
+ dict(
+ name='left_thumb3',
+ id=94,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb3'),
+ 95:
+ dict(
+ name='left_thumb4',
+ id=95,
+ color=[255, 128, 0],
+ type='',
+ swap='right_thumb4'),
+ 96:
+ dict(
+ name='left_forefinger1',
+ id=96,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger1'),
+ 97:
+ dict(
+ name='left_forefinger2',
+ id=97,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger2'),
+ 98:
+ dict(
+ name='left_forefinger3',
+ id=98,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger3'),
+ 99:
+ dict(
+ name='left_forefinger4',
+ id=99,
+ color=[255, 153, 255],
+ type='',
+ swap='right_forefinger4'),
+ 100:
+ dict(
+ name='left_middle_finger1',
+ id=100,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger1'),
+ 101:
+ dict(
+ name='left_middle_finger2',
+ id=101,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger2'),
+ 102:
+ dict(
+ name='left_middle_finger3',
+ id=102,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger3'),
+ 103:
+ dict(
+ name='left_middle_finger4',
+ id=103,
+ color=[102, 178, 255],
+ type='',
+ swap='right_middle_finger4'),
+ 104:
+ dict(
+ name='left_ring_finger1',
+ id=104,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger1'),
+ 105:
+ dict(
+ name='left_ring_finger2',
+ id=105,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger2'),
+ 106:
+ dict(
+ name='left_ring_finger3',
+ id=106,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger3'),
+ 107:
+ dict(
+ name='left_ring_finger4',
+ id=107,
+ color=[255, 51, 51],
+ type='',
+ swap='right_ring_finger4'),
+ 108:
+ dict(
+ name='left_pinky_finger1',
+ id=108,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger1'),
+ 109:
+ dict(
+ name='left_pinky_finger2',
+ id=109,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger2'),
+ 110:
+ dict(
+ name='left_pinky_finger3',
+ id=110,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger3'),
+ 111:
+ dict(
+ name='left_pinky_finger4',
+ id=111,
+ color=[0, 255, 0],
+ type='',
+ swap='right_pinky_finger4'),
+ 112:
+ dict(
+ name='right_hand_root',
+ id=112,
+ color=[255, 255, 255],
+ type='',
+ swap='left_hand_root'),
+ 113:
+ dict(
+ name='right_thumb1',
+ id=113,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb1'),
+ 114:
+ dict(
+ name='right_thumb2',
+ id=114,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb2'),
+ 115:
+ dict(
+ name='right_thumb3',
+ id=115,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb3'),
+ 116:
+ dict(
+ name='right_thumb4',
+ id=116,
+ color=[255, 128, 0],
+ type='',
+ swap='left_thumb4'),
+ 117:
+ dict(
+ name='right_forefinger1',
+ id=117,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger1'),
+ 118:
+ dict(
+ name='right_forefinger2',
+ id=118,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger2'),
+ 119:
+ dict(
+ name='right_forefinger3',
+ id=119,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger3'),
+ 120:
+ dict(
+ name='right_forefinger4',
+ id=120,
+ color=[255, 153, 255],
+ type='',
+ swap='left_forefinger4'),
+ 121:
+ dict(
+ name='right_middle_finger1',
+ id=121,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger1'),
+ 122:
+ dict(
+ name='right_middle_finger2',
+ id=122,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger2'),
+ 123:
+ dict(
+ name='right_middle_finger3',
+ id=123,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger3'),
+ 124:
+ dict(
+ name='right_middle_finger4',
+ id=124,
+ color=[102, 178, 255],
+ type='',
+ swap='left_middle_finger4'),
+ 125:
+ dict(
+ name='right_ring_finger1',
+ id=125,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger1'),
+ 126:
+ dict(
+ name='right_ring_finger2',
+ id=126,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger2'),
+ 127:
+ dict(
+ name='right_ring_finger3',
+ id=127,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger3'),
+ 128:
+ dict(
+ name='right_ring_finger4',
+ id=128,
+ color=[255, 51, 51],
+ type='',
+ swap='left_ring_finger4'),
+ 129:
+ dict(
+ name='right_pinky_finger1',
+ id=129,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger1'),
+ 130:
+ dict(
+ name='right_pinky_finger2',
+ id=130,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger2'),
+ 131:
+ dict(
+ name='right_pinky_finger3',
+ id=131,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger3'),
+ 132:
+ dict(
+ name='right_pinky_finger4',
+ id=132,
+ color=[0, 255, 0],
+ type='',
+ swap='left_pinky_finger4')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ 1:
+ dict(link=('left_knee', 'left_hip'), id=1, color=[0, 255, 0]),
+ 2:
+ dict(link=('right_ankle', 'right_knee'), id=2, color=[255, 128, 0]),
+ 3:
+ dict(link=('right_knee', 'right_hip'), id=3, color=[255, 128, 0]),
+ 4:
+ dict(link=('left_hip', 'right_hip'), id=4, color=[51, 153, 255]),
+ 5:
+ dict(link=('left_shoulder', 'left_hip'), id=5, color=[51, 153, 255]),
+ 6:
+ dict(link=('right_shoulder', 'right_hip'), id=6, color=[51, 153, 255]),
+ 7:
+ dict(
+ link=('left_shoulder', 'right_shoulder'),
+ id=7,
+ color=[51, 153, 255]),
+ 8:
+ dict(link=('left_shoulder', 'left_elbow'), id=8, color=[0, 255, 0]),
+ 9:
+ dict(
+ link=('right_shoulder', 'right_elbow'), id=9, color=[255, 128, 0]),
+ 10:
+ dict(link=('left_elbow', 'left_wrist'), id=10, color=[0, 255, 0]),
+ 11:
+ dict(link=('right_elbow', 'right_wrist'), id=11, color=[255, 128, 0]),
+ 12:
+ dict(link=('left_eye', 'right_eye'), id=12, color=[51, 153, 255]),
+ 13:
+ dict(link=('nose', 'left_eye'), id=13, color=[51, 153, 255]),
+ 14:
+ dict(link=('nose', 'right_eye'), id=14, color=[51, 153, 255]),
+ 15:
+ dict(link=('left_eye', 'left_ear'), id=15, color=[51, 153, 255]),
+ 16:
+ dict(link=('right_eye', 'right_ear'), id=16, color=[51, 153, 255]),
+ 17:
+ dict(link=('left_ear', 'left_shoulder'), id=17, color=[51, 153, 255]),
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255]),
+ 19:
+ dict(link=('left_ankle', 'left_big_toe'), id=19, color=[0, 255, 0]),
+ 20:
+ dict(link=('left_ankle', 'left_small_toe'), id=20, color=[0, 255, 0]),
+ 21:
+ dict(link=('left_ankle', 'left_heel'), id=21, color=[0, 255, 0]),
+ 22:
+ dict(
+ link=('right_ankle', 'right_big_toe'), id=22, color=[255, 128, 0]),
+ 23:
+ dict(
+ link=('right_ankle', 'right_small_toe'),
+ id=23,
+ color=[255, 128, 0]),
+ 24:
+ dict(link=('right_ankle', 'right_heel'), id=24, color=[255, 128, 0]),
+ 25:
+ dict(
+ link=('left_hand_root', 'left_thumb1'), id=25, color=[255, 128,
+ 0]),
+ 26:
+ dict(link=('left_thumb1', 'left_thumb2'), id=26, color=[255, 128, 0]),
+ 27:
+ dict(link=('left_thumb2', 'left_thumb3'), id=27, color=[255, 128, 0]),
+ 28:
+ dict(link=('left_thumb3', 'left_thumb4'), id=28, color=[255, 128, 0]),
+ 29:
+ dict(
+ link=('left_hand_root', 'left_forefinger1'),
+ id=29,
+ color=[255, 153, 255]),
+ 30:
+ dict(
+ link=('left_forefinger1', 'left_forefinger2'),
+ id=30,
+ color=[255, 153, 255]),
+ 31:
+ dict(
+ link=('left_forefinger2', 'left_forefinger3'),
+ id=31,
+ color=[255, 153, 255]),
+ 32:
+ dict(
+ link=('left_forefinger3', 'left_forefinger4'),
+ id=32,
+ color=[255, 153, 255]),
+ 33:
+ dict(
+ link=('left_hand_root', 'left_middle_finger1'),
+ id=33,
+ color=[102, 178, 255]),
+ 34:
+ dict(
+ link=('left_middle_finger1', 'left_middle_finger2'),
+ id=34,
+ color=[102, 178, 255]),
+ 35:
+ dict(
+ link=('left_middle_finger2', 'left_middle_finger3'),
+ id=35,
+ color=[102, 178, 255]),
+ 36:
+ dict(
+ link=('left_middle_finger3', 'left_middle_finger4'),
+ id=36,
+ color=[102, 178, 255]),
+ 37:
+ dict(
+ link=('left_hand_root', 'left_ring_finger1'),
+ id=37,
+ color=[255, 51, 51]),
+ 38:
+ dict(
+ link=('left_ring_finger1', 'left_ring_finger2'),
+ id=38,
+ color=[255, 51, 51]),
+ 39:
+ dict(
+ link=('left_ring_finger2', 'left_ring_finger3'),
+ id=39,
+ color=[255, 51, 51]),
+ 40:
+ dict(
+ link=('left_ring_finger3', 'left_ring_finger4'),
+ id=40,
+ color=[255, 51, 51]),
+ 41:
+ dict(
+ link=('left_hand_root', 'left_pinky_finger1'),
+ id=41,
+ color=[0, 255, 0]),
+ 42:
+ dict(
+ link=('left_pinky_finger1', 'left_pinky_finger2'),
+ id=42,
+ color=[0, 255, 0]),
+ 43:
+ dict(
+ link=('left_pinky_finger2', 'left_pinky_finger3'),
+ id=43,
+ color=[0, 255, 0]),
+ 44:
+ dict(
+ link=('left_pinky_finger3', 'left_pinky_finger4'),
+ id=44,
+ color=[0, 255, 0]),
+ 45:
+ dict(
+ link=('right_hand_root', 'right_thumb1'),
+ id=45,
+ color=[255, 128, 0]),
+ 46:
+ dict(
+ link=('right_thumb1', 'right_thumb2'), id=46, color=[255, 128, 0]),
+ 47:
+ dict(
+ link=('right_thumb2', 'right_thumb3'), id=47, color=[255, 128, 0]),
+ 48:
+ dict(
+ link=('right_thumb3', 'right_thumb4'), id=48, color=[255, 128, 0]),
+ 49:
+ dict(
+ link=('right_hand_root', 'right_forefinger1'),
+ id=49,
+ color=[255, 153, 255]),
+ 50:
+ dict(
+ link=('right_forefinger1', 'right_forefinger2'),
+ id=50,
+ color=[255, 153, 255]),
+ 51:
+ dict(
+ link=('right_forefinger2', 'right_forefinger3'),
+ id=51,
+ color=[255, 153, 255]),
+ 52:
+ dict(
+ link=('right_forefinger3', 'right_forefinger4'),
+ id=52,
+ color=[255, 153, 255]),
+ 53:
+ dict(
+ link=('right_hand_root', 'right_middle_finger1'),
+ id=53,
+ color=[102, 178, 255]),
+ 54:
+ dict(
+ link=('right_middle_finger1', 'right_middle_finger2'),
+ id=54,
+ color=[102, 178, 255]),
+ 55:
+ dict(
+ link=('right_middle_finger2', 'right_middle_finger3'),
+ id=55,
+ color=[102, 178, 255]),
+ 56:
+ dict(
+ link=('right_middle_finger3', 'right_middle_finger4'),
+ id=56,
+ color=[102, 178, 255]),
+ 57:
+ dict(
+ link=('right_hand_root', 'right_ring_finger1'),
+ id=57,
+ color=[255, 51, 51]),
+ 58:
+ dict(
+ link=('right_ring_finger1', 'right_ring_finger2'),
+ id=58,
+ color=[255, 51, 51]),
+ 59:
+ dict(
+ link=('right_ring_finger2', 'right_ring_finger3'),
+ id=59,
+ color=[255, 51, 51]),
+ 60:
+ dict(
+ link=('right_ring_finger3', 'right_ring_finger4'),
+ id=60,
+ color=[255, 51, 51]),
+ 61:
+ dict(
+ link=('right_hand_root', 'right_pinky_finger1'),
+ id=61,
+ color=[0, 255, 0]),
+ 62:
+ dict(
+ link=('right_pinky_finger1', 'right_pinky_finger2'),
+ id=62,
+ color=[0, 255, 0]),
+ 63:
+ dict(
+ link=('right_pinky_finger2', 'right_pinky_finger3'),
+ id=63,
+ color=[0, 255, 0]),
+ 64:
+ dict(
+ link=('right_pinky_finger3', 'right_pinky_finger4'),
+ id=64,
+ color=[0, 255, 0])
+ },
+ joint_weights=[1.] * 133,
+ # 'https://github.com/jin-s13/COCO-WholeBody/blob/master/'
+ # 'evaluation/myeval_wholebody.py#L175'
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089, 0.068, 0.066, 0.066,
+ 0.092, 0.094, 0.094, 0.042, 0.043, 0.044, 0.043, 0.040, 0.035, 0.031,
+ 0.025, 0.020, 0.023, 0.029, 0.032, 0.037, 0.038, 0.043, 0.041, 0.045,
+ 0.013, 0.012, 0.011, 0.011, 0.012, 0.012, 0.011, 0.011, 0.013, 0.015,
+ 0.009, 0.007, 0.007, 0.007, 0.012, 0.009, 0.008, 0.016, 0.010, 0.017,
+ 0.011, 0.009, 0.011, 0.009, 0.007, 0.013, 0.008, 0.011, 0.012, 0.010,
+ 0.034, 0.008, 0.008, 0.009, 0.008, 0.008, 0.007, 0.010, 0.008, 0.009,
+ 0.009, 0.009, 0.007, 0.007, 0.008, 0.011, 0.008, 0.008, 0.008, 0.01,
+ 0.008, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024, 0.035,
+ 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02, 0.019,
+ 0.022, 0.031, 0.029, 0.022, 0.035, 0.037, 0.047, 0.026, 0.025, 0.024,
+ 0.035, 0.018, 0.024, 0.022, 0.026, 0.017, 0.021, 0.021, 0.032, 0.02,
+ 0.019, 0.022, 0.031
+ ])
diff --git a/configs/_base_/datasets/ubody3d.py b/configs/_base_/datasets/ubody3d.py
new file mode 100644
index 0000000000000000000000000000000000000000..9242559ea1fd85291d0f9136b65fdd5cb66664fb
--- /dev/null
+++ b/configs/_base_/datasets/ubody3d.py
@@ -0,0 +1,958 @@
+dataset_info = dict(
+ dataset_name='ubody3d',
+ paper_info=dict(
+ author='Jing Lin, Ailing Zeng, Haoqian Wang, Lei Zhang, Yu Li',
+ title='One-Stage 3D Whole-Body Mesh Recovery with Component Aware'
+ 'Transformer',
+ container='IEEE Computer Society Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2023',
+ homepage='https://github.com/IDEA-Research/OSX',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='Pelvis', id=0, color=[0, 255, 0], type='', swap=''),
+ 1:
+ dict(
+ name='L_Hip', id=1, color=[0, 255, 0], type='lower', swap='R_Hip'),
+ 2:
+ dict(
+ name='R_Hip', id=2, color=[0, 255, 0], type='lower', swap='L_Hip'),
+ 3:
+ dict(
+ name='L_Knee',
+ id=3,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_Knee'),
+ 4:
+ dict(
+ name='R_Knee',
+ id=4,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Knee'),
+ 5:
+ dict(
+ name='L_Ankle',
+ id=5,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_Ankle'),
+ 6:
+ dict(
+ name='R_Ankle',
+ id=6,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Ankle'),
+ 7:
+ dict(name='Neck', id=7, color=[0, 255, 0], type='upper', swap=''),
+ 8:
+ dict(
+ name='L_Shoulder',
+ id=8,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_Shoulder'),
+ 9:
+ dict(
+ name='R_Shoulder',
+ id=9,
+ color=[0, 255, 0],
+ type='upper',
+ swap='L_Shoulder'),
+ 10:
+ dict(
+ name='L_Elbow',
+ id=10,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_Elbow'),
+ 11:
+ dict(
+ name='R_Elbow',
+ id=11,
+ color=[0, 255, 0],
+ type='upper',
+ swap='L_Elbow'),
+ 12:
+ dict(
+ name='L_Wrist',
+ id=12,
+ color=[0, 255, 0],
+ type='upper',
+ swap='R_Wrist'),
+ 13:
+ dict(
+ name='R_Wrist',
+ id=13,
+ color=[0, 255, 0],
+ type='upper',
+ swap='L_Wrist'),
+ 14:
+ dict(
+ name='L_Big_toe',
+ id=14,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_Big_toe'),
+ 15:
+ dict(
+ name='L_Small_toe',
+ id=15,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_Small_toe'),
+ 16:
+ dict(
+ name='L_Heel',
+ id=16,
+ color=[0, 255, 0],
+ type='lower',
+ swap='R_Heel'),
+ 17:
+ dict(
+ name='R_Big_toe',
+ id=17,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Big_toe'),
+ 18:
+ dict(
+ name='R_Small_toe',
+ id=18,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Small_toe'),
+ 19:
+ dict(
+ name='R_Heel',
+ id=19,
+ color=[0, 255, 0],
+ type='lower',
+ swap='L_Heel'),
+ 20:
+ dict(
+ name='L_Ear', id=20, color=[0, 255, 0], type='upper',
+ swap='R_Ear'),
+ 21:
+ dict(
+ name='R_Ear', id=21, color=[0, 255, 0], type='upper',
+ swap='L_Ear'),
+ 22:
+ dict(name='L_Eye', id=22, color=[0, 255, 0], type='', swap='R_Eye'),
+ 23:
+ dict(name='R_Eye', id=23, color=[0, 255, 0], type='', swap='L_Eye'),
+ 24:
+ dict(name='Nose', id=24, color=[0, 255, 0], type='upper', swap=''),
+ 25:
+ dict(
+ name='L_Thumb_1',
+ id=25,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Thumb_1'),
+ 26:
+ dict(
+ name='L_Thumb_2',
+ id=26,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Thumb_2'),
+ 27:
+ dict(
+ name='L_Thumb_3',
+ id=27,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Thumb_3'),
+ 28:
+ dict(
+ name='L_Thumb_4',
+ id=28,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Thumb_4'),
+ 29:
+ dict(
+ name='L_Index_1',
+ id=29,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Index_1'),
+ 30:
+ dict(
+ name='L_Index_2',
+ id=30,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Index_2'),
+ 31:
+ dict(
+ name='L_Index_3',
+ id=31,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Index_3'),
+ 32:
+ dict(
+ name='L_Index_4',
+ id=32,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Index_4'),
+ 33:
+ dict(
+ name='L_Middle_1',
+ id=33,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Middle_1'),
+ 34:
+ dict(
+ name='L_Middle_2',
+ id=34,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Middle_2'),
+ 35:
+ dict(
+ name='L_Middle_3',
+ id=35,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Middle_3'),
+ 36:
+ dict(
+ name='L_Middle_4',
+ id=36,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Middle_4'),
+ 37:
+ dict(
+ name='L_Ring_1',
+ id=37,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Ring_1'),
+ 38:
+ dict(
+ name='L_Ring_2',
+ id=38,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Ring_2'),
+ 39:
+ dict(
+ name='L_Ring_3',
+ id=39,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Ring_3'),
+ 40:
+ dict(
+ name='L_Ring_4',
+ id=40,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Ring_4'),
+ 41:
+ dict(
+ name='L_Pinky_1',
+ id=41,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Pinky_1'),
+ 42:
+ dict(
+ name='L_Pinky_2',
+ id=42,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Pinky_2'),
+ 43:
+ dict(
+ name='L_Pinky_3',
+ id=43,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Pinky_3'),
+ 44:
+ dict(
+ name='L_Pinky_4',
+ id=44,
+ color=[255, 128, 0],
+ type='',
+ swap='R_Pinky_4'),
+ 45:
+ dict(
+ name='R_Thumb_1',
+ id=45,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Thumb_1'),
+ 46:
+ dict(
+ name='R_Thumb_2',
+ id=46,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Thumb_2'),
+ 47:
+ dict(
+ name='R_Thumb_3',
+ id=47,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Thumb_3'),
+ 48:
+ dict(
+ name='R_Thumb_4',
+ id=48,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Thumb_4'),
+ 49:
+ dict(
+ name='R_Index_1',
+ id=49,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Index_1'),
+ 50:
+ dict(
+ name='R_Index_2',
+ id=50,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Index_2'),
+ 51:
+ dict(
+ name='R_Index_3',
+ id=51,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Index_3'),
+ 52:
+ dict(
+ name='R_Index_4',
+ id=52,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Index_4'),
+ 53:
+ dict(
+ name='R_Middle_1',
+ id=53,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Middle_1'),
+ 54:
+ dict(
+ name='R_Middle_2',
+ id=54,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Middle_2'),
+ 55:
+ dict(
+ name='R_Middle_3',
+ id=55,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Middle_3'),
+ 56:
+ dict(
+ name='R_Middle_4',
+ id=56,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Middle_4'),
+ 57:
+ dict(
+ name='R_Ring_1',
+ id=57,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Ring_1'),
+ 58:
+ dict(
+ name='R_Ring_2',
+ id=58,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Ring_2'),
+ 59:
+ dict(
+ name='R_Ring_3',
+ id=59,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Ring_3'),
+ 60:
+ dict(
+ name='R_Ring_4',
+ id=60,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Ring_4'),
+ 61:
+ dict(
+ name='R_Pinky_1',
+ id=61,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Pinky_1'),
+ 62:
+ dict(
+ name='R_Pinky_2',
+ id=62,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Pinky_2'),
+ 63:
+ dict(
+ name='R_Pinky_3',
+ id=63,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Pinky_3'),
+ 64:
+ dict(
+ name='R_Pinky_4',
+ id=64,
+ color=[255, 128, 0],
+ type='',
+ swap='L_Pinky_4'),
+ 65:
+ dict(name='Face_1', id=65, color=[255, 255, 255], type='', swap=''),
+ 66:
+ dict(name='Face_2', id=66, color=[255, 255, 255], type='', swap=''),
+ 67:
+ dict(
+ name='Face_3',
+ id=67,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_4'),
+ 68:
+ dict(
+ name='Face_4',
+ id=68,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_3'),
+ 69:
+ dict(
+ name='Face_5',
+ id=69,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_14'),
+ 70:
+ dict(
+ name='Face_6',
+ id=70,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_13'),
+ 71:
+ dict(
+ name='Face_7',
+ id=71,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_12'),
+ 72:
+ dict(
+ name='Face_8',
+ id=72,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_11'),
+ 73:
+ dict(
+ name='Face_9',
+ id=73,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_10'),
+ 74:
+ dict(
+ name='Face_10',
+ id=74,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_9'),
+ 75:
+ dict(
+ name='Face_11',
+ id=75,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_8'),
+ 76:
+ dict(
+ name='Face_12',
+ id=76,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_7'),
+ 77:
+ dict(
+ name='Face_13',
+ id=77,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_6'),
+ 78:
+ dict(
+ name='Face_14',
+ id=78,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_5'),
+ 79:
+ dict(name='Face_15', id=79, color=[255, 255, 255], type='', swap=''),
+ 80:
+ dict(name='Face_16', id=80, color=[255, 255, 255], type='', swap=''),
+ 81:
+ dict(name='Face_17', id=81, color=[255, 255, 255], type='', swap=''),
+ 82:
+ dict(name='Face_18', id=82, color=[255, 255, 255], type='', swap=''),
+ 83:
+ dict(
+ name='Face_19',
+ id=83,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_23'),
+ 84:
+ dict(
+ name='Face_20',
+ id=84,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_22'),
+ 85:
+ dict(name='Face_21', id=85, color=[255, 255, 255], type='', swap=''),
+ 86:
+ dict(
+ name='Face_22',
+ id=86,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_20'),
+ 87:
+ dict(
+ name='Face_23',
+ id=87,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_19'),
+ 88:
+ dict(
+ name='Face_24',
+ id=88,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_33'),
+ 89:
+ dict(
+ name='Face_25',
+ id=89,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_32'),
+ 90:
+ dict(
+ name='Face_26',
+ id=90,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_31'),
+ 91:
+ dict(
+ name='Face_27',
+ id=91,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_30'),
+ 92:
+ dict(
+ name='Face_28',
+ id=92,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_35'),
+ 93:
+ dict(
+ name='Face_29',
+ id=93,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_34'),
+ 94:
+ dict(
+ name='Face_30',
+ id=94,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_27'),
+ 95:
+ dict(
+ name='Face_31',
+ id=95,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_26'),
+ 96:
+ dict(
+ name='Face_32',
+ id=96,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_25'),
+ 97:
+ dict(
+ name='Face_33',
+ id=97,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_24'),
+ 98:
+ dict(
+ name='Face_34',
+ id=98,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_29'),
+ 99:
+ dict(
+ name='Face_35',
+ id=99,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_28'),
+ 100:
+ dict(
+ name='Face_36',
+ id=100,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_42'),
+ 101:
+ dict(
+ name='Face_37',
+ id=101,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_41'),
+ 102:
+ dict(
+ name='Face_38',
+ id=102,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_40'),
+ 103:
+ dict(name='Face_39', id=103, color=[255, 255, 255], type='', swap=''),
+ 104:
+ dict(
+ name='Face_40',
+ id=104,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_38'),
+ 105:
+ dict(
+ name='Face_41',
+ id=105,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_37'),
+ 106:
+ dict(
+ name='Face_42',
+ id=106,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_36'),
+ 107:
+ dict(
+ name='Face_43',
+ id=107,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_47'),
+ 108:
+ dict(
+ name='Face_44',
+ id=108,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_46'),
+ 109:
+ dict(name='Face_45', id=109, color=[255, 255, 255], type='', swap=''),
+ 110:
+ dict(
+ name='Face_46',
+ id=110,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_44'),
+ 111:
+ dict(
+ name='Face_47',
+ id=111,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_43'),
+ 112:
+ dict(
+ name='Face_48',
+ id=112,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_52'),
+ 113:
+ dict(
+ name='Face_49',
+ id=113,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_51'),
+ 114:
+ dict(name='Face_50', id=114, color=[255, 255, 255], type='', swap=''),
+ 115:
+ dict(
+ name='Face_51',
+ id=115,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_49'),
+ 116:
+ dict(
+ name='Face_52',
+ id=116,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_48'),
+ 117:
+ dict(
+ name='Face_53',
+ id=117,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_55'),
+ 118:
+ dict(name='Face_54', id=118, color=[255, 255, 255], type='', swap=''),
+ 119:
+ dict(
+ name='Face_55',
+ id=119,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_53'),
+ 120:
+ dict(
+ name='Face_56',
+ id=120,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_72'),
+ 121:
+ dict(
+ name='Face_57',
+ id=121,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_71'),
+ 122:
+ dict(
+ name='Face_58',
+ id=122,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_70'),
+ 123:
+ dict(
+ name='Face_59',
+ id=123,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_69'),
+ 124:
+ dict(
+ name='Face_60',
+ id=124,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_68'),
+ 125:
+ dict(
+ name='Face_61',
+ id=125,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_67'),
+ 126:
+ dict(
+ name='Face_62',
+ id=126,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_66'),
+ 127:
+ dict(
+ name='Face_63',
+ id=127,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_65'),
+ 128:
+ dict(name='Face_64', id=128, color=[255, 255, 255], type='', swap=''),
+ 129:
+ dict(
+ name='Face_65',
+ id=129,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_63'),
+ 130:
+ dict(
+ name='Face_66',
+ id=130,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_62'),
+ 131:
+ dict(
+ name='Face_67',
+ id=131,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_61'),
+ 132:
+ dict(
+ name='Face_68',
+ id=132,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_60'),
+ 133:
+ dict(
+ name='Face_69',
+ id=133,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_59'),
+ 134:
+ dict(
+ name='Face_70',
+ id=134,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_58'),
+ 135:
+ dict(
+ name='Face_71',
+ id=135,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_57'),
+ 136:
+ dict(
+ name='Face_72',
+ id=136,
+ color=[255, 255, 255],
+ type='',
+ swap='Face_56'),
+ },
+ skeleton_info={
+ 0: dict(link=('L_Ankle', 'L_Knee'), id=0, color=[0, 255, 0]),
+ 1: dict(link=('L_Knee', 'L_Hip'), id=1, color=[0, 255, 0]),
+ 2: dict(link=('R_Ankle', 'R_Knee'), id=2, color=[0, 255, 0]),
+ 3: dict(link=('R_Knee', 'R_Hip'), id=3, color=[0, 255, 0]),
+ 4: dict(link=('L_Hip', 'R_Hip'), id=4, color=[0, 255, 0]),
+ 5: dict(link=('L_Shoulder', 'L_Hip'), id=5, color=[0, 255, 0]),
+ 6: dict(link=('R_Shoulder', 'R_Hip'), id=6, color=[0, 255, 0]),
+ 7: dict(link=('L_Shoulder', 'R_Shoulder'), id=7, color=[0, 255, 0]),
+ 8: dict(link=('L_Shoulder', 'L_Elbow'), id=8, color=[0, 255, 0]),
+ 9: dict(link=('R_Shoulder', 'R_Elbow'), id=9, color=[0, 255, 0]),
+ 10: dict(link=('L_Elbow', 'L_Wrist'), id=10, color=[0, 255, 0]),
+ 11: dict(link=('R_Elbow', 'R_Wrist'), id=11, color=[255, 128, 0]),
+ 12: dict(link=('L_Eye', 'R_Eye'), id=12, color=[255, 128, 0]),
+ 13: dict(link=('Nose', 'L_Eye'), id=13, color=[255, 128, 0]),
+ 14: dict(link=('Nose', 'R_Eye'), id=14, color=[255, 128, 0]),
+ 15: dict(link=('L_Eye', 'L_Ear'), id=15, color=[255, 128, 0]),
+ 16: dict(link=('R_Eye', 'R_Ear'), id=16, color=[255, 128, 0]),
+ 17: dict(link=('L_Ear', 'L_Shoulder'), id=17, color=[255, 128, 0]),
+ 18: dict(link=('R_Ear', 'R_Shoulder'), id=18, color=[255, 128, 0]),
+ 19: dict(link=('L_Ankle', 'L_Big_toe'), id=19, color=[255, 128, 0]),
+ 20: dict(link=('L_Ankle', 'L_Small_toe'), id=20, color=[255, 128, 0]),
+ 21: dict(link=('L_Ankle', 'L_Heel'), id=21, color=[255, 128, 0]),
+ 22: dict(link=('R_Ankle', 'R_Big_toe'), id=22, color=[255, 128, 0]),
+ 23: dict(link=('R_Ankle', 'R_Small_toe'), id=23, color=[255, 128, 0]),
+ 24: dict(link=('R_Ankle', 'R_Heel'), id=24, color=[255, 128, 0]),
+ 25: dict(link=('L_Wrist', 'L_Thumb_1'), id=25, color=[255, 128, 0]),
+ 26: dict(link=('L_Thumb_1', 'L_Thumb_2'), id=26, color=[255, 128, 0]),
+ 27: dict(link=('L_Thumb_2', 'L_Thumb_3'), id=27, color=[255, 128, 0]),
+ 28: dict(link=('L_Thumb_3', 'L_Thumb_4'), id=28, color=[255, 128, 0]),
+ 29: dict(link=('L_Wrist', 'L_Index_1'), id=29, color=[255, 128, 0]),
+ 30: dict(link=('L_Index_1', 'L_Index_2'), id=30, color=[255, 128, 0]),
+ 31:
+ dict(link=('L_Index_2', 'L_Index_3'), id=31, color=[255, 255, 255]),
+ 32:
+ dict(link=('L_Index_3', 'L_Index_4'), id=32, color=[255, 255, 255]),
+ 33: dict(link=('L_Wrist', 'L_Middle_1'), id=33, color=[255, 255, 255]),
+ 34:
+ dict(link=('L_Middle_1', 'L_Middle_2'), id=34, color=[255, 255, 255]),
+ 35:
+ dict(link=('L_Middle_2', 'L_Middle_3'), id=35, color=[255, 255, 255]),
+ 36:
+ dict(link=('L_Middle_3', 'L_Middle_4'), id=36, color=[255, 255, 255]),
+ 37: dict(link=('L_Wrist', 'L_Ring_1'), id=37, color=[255, 255, 255]),
+ 38: dict(link=('L_Ring_1', 'L_Ring_2'), id=38, color=[255, 255, 255]),
+ 39: dict(link=('L_Ring_2', 'L_Ring_3'), id=39, color=[255, 255, 255]),
+ 40: dict(link=('L_Ring_3', 'L_Ring_4'), id=40, color=[255, 255, 255]),
+ 41: dict(link=('L_Wrist', 'L_Pinky_1'), id=41, color=[255, 255, 255]),
+ 42:
+ dict(link=('L_Pinky_1', 'L_Pinky_2'), id=42, color=[255, 255, 255]),
+ 43:
+ dict(link=('L_Pinky_2', 'L_Pinky_3'), id=43, color=[255, 255, 255]),
+ 44:
+ dict(link=('L_Pinky_3', 'L_Pinky_4'), id=44, color=[255, 255, 255]),
+ 45: dict(link=('R_Wrist', 'R_Thumb_1'), id=45, color=[255, 255, 255]),
+ 46:
+ dict(link=('R_Thumb_1', 'R_Thumb_2'), id=46, color=[255, 255, 255]),
+ 47:
+ dict(link=('R_Thumb_2', 'R_Thumb_3'), id=47, color=[255, 255, 255]),
+ 48:
+ dict(link=('R_Thumb_3', 'R_Thumb_4'), id=48, color=[255, 255, 255]),
+ 49: dict(link=('R_Wrist', 'R_Index_1'), id=49, color=[255, 255, 255]),
+ 50:
+ dict(link=('R_Index_1', 'R_Index_2'), id=50, color=[255, 255, 255]),
+ 51:
+ dict(link=('R_Index_2', 'R_Index_3'), id=51, color=[255, 255, 255]),
+ 52:
+ dict(link=('R_Index_3', 'R_Index_4'), id=52, color=[255, 255, 255]),
+ 53: dict(link=('R_Wrist', 'R_Middle_1'), id=53, color=[255, 255, 255]),
+ 54:
+ dict(link=('R_Middle_1', 'R_Middle_2'), id=54, color=[255, 255, 255]),
+ 55:
+ dict(link=('R_Middle_2', 'R_Middle_3'), id=55, color=[255, 255, 255]),
+ 56:
+ dict(link=('R_Middle_3', 'R_Middle_4'), id=56, color=[255, 255, 255]),
+ 57: dict(link=('R_Wrist', 'R_Pinky_1'), id=57, color=[255, 255, 255]),
+ 58:
+ dict(link=('R_Pinky_1', 'R_Pinky_2'), id=58, color=[255, 255, 255]),
+ 59:
+ dict(link=('R_Pinky_2', 'R_Pinky_3'), id=59, color=[255, 255, 255]),
+ 60:
+ dict(link=('R_Pinky_3', 'R_Pinky_4'), id=60, color=[255, 255, 255]),
+ },
+ joint_weights=[1.] * 137,
+ sigmas=[])
diff --git a/configs/_base_/datasets/wflw.py b/configs/_base_/datasets/wflw.py
new file mode 100644
index 0000000000000000000000000000000000000000..80c29b696cf5031d8f21d7d8ed7e573043666f35
--- /dev/null
+++ b/configs/_base_/datasets/wflw.py
@@ -0,0 +1,192 @@
+dataset_info = dict(
+ dataset_name='wflw',
+ paper_info=dict(
+ author='Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, '
+ 'Quan and Cai, Yici and Zhou, Qiang',
+ title='Look at boundary: A boundary-aware face alignment algorithm',
+ container='Proceedings of the IEEE conference on computer '
+ 'vision and pattern recognition',
+ year='2018',
+ homepage='https://wywu.github.io/projects/LAB/WFLW.html',
+ ),
+ keypoint_info={
+ 0: dict(name='kpt-0', id=0, color=[255, 0, 0], type='', swap='kpt-32'),
+ 1: dict(name='kpt-1', id=1, color=[255, 0, 0], type='', swap='kpt-31'),
+ 2: dict(name='kpt-2', id=2, color=[255, 0, 0], type='', swap='kpt-30'),
+ 3: dict(name='kpt-3', id=3, color=[255, 0, 0], type='', swap='kpt-29'),
+ 4: dict(name='kpt-4', id=4, color=[255, 0, 0], type='', swap='kpt-28'),
+ 5: dict(name='kpt-5', id=5, color=[255, 0, 0], type='', swap='kpt-27'),
+ 6: dict(name='kpt-6', id=6, color=[255, 0, 0], type='', swap='kpt-26'),
+ 7: dict(name='kpt-7', id=7, color=[255, 0, 0], type='', swap='kpt-25'),
+ 8: dict(name='kpt-8', id=8, color=[255, 0, 0], type='', swap='kpt-24'),
+ 9: dict(name='kpt-9', id=9, color=[255, 0, 0], type='', swap='kpt-23'),
+ 10:
+ dict(name='kpt-10', id=10, color=[255, 0, 0], type='', swap='kpt-22'),
+ 11:
+ dict(name='kpt-11', id=11, color=[255, 0, 0], type='', swap='kpt-21'),
+ 12:
+ dict(name='kpt-12', id=12, color=[255, 0, 0], type='', swap='kpt-20'),
+ 13:
+ dict(name='kpt-13', id=13, color=[255, 0, 0], type='', swap='kpt-19'),
+ 14:
+ dict(name='kpt-14', id=14, color=[255, 0, 0], type='', swap='kpt-18'),
+ 15:
+ dict(name='kpt-15', id=15, color=[255, 0, 0], type='', swap='kpt-17'),
+ 16: dict(name='kpt-16', id=16, color=[255, 0, 0], type='', swap=''),
+ 17:
+ dict(name='kpt-17', id=17, color=[255, 0, 0], type='', swap='kpt-15'),
+ 18:
+ dict(name='kpt-18', id=18, color=[255, 0, 0], type='', swap='kpt-14'),
+ 19:
+ dict(name='kpt-19', id=19, color=[255, 0, 0], type='', swap='kpt-13'),
+ 20:
+ dict(name='kpt-20', id=20, color=[255, 0, 0], type='', swap='kpt-12'),
+ 21:
+ dict(name='kpt-21', id=21, color=[255, 0, 0], type='', swap='kpt-11'),
+ 22:
+ dict(name='kpt-22', id=22, color=[255, 0, 0], type='', swap='kpt-10'),
+ 23:
+ dict(name='kpt-23', id=23, color=[255, 0, 0], type='', swap='kpt-9'),
+ 24:
+ dict(name='kpt-24', id=24, color=[255, 0, 0], type='', swap='kpt-8'),
+ 25:
+ dict(name='kpt-25', id=25, color=[255, 0, 0], type='', swap='kpt-7'),
+ 26:
+ dict(name='kpt-26', id=26, color=[255, 0, 0], type='', swap='kpt-6'),
+ 27:
+ dict(name='kpt-27', id=27, color=[255, 0, 0], type='', swap='kpt-5'),
+ 28:
+ dict(name='kpt-28', id=28, color=[255, 0, 0], type='', swap='kpt-4'),
+ 29:
+ dict(name='kpt-29', id=29, color=[255, 0, 0], type='', swap='kpt-3'),
+ 30:
+ dict(name='kpt-30', id=30, color=[255, 0, 0], type='', swap='kpt-2'),
+ 31:
+ dict(name='kpt-31', id=31, color=[255, 0, 0], type='', swap='kpt-1'),
+ 32:
+ dict(name='kpt-32', id=32, color=[255, 0, 0], type='', swap='kpt-0'),
+ 33:
+ dict(name='kpt-33', id=33, color=[255, 0, 0], type='', swap='kpt-46'),
+ 34:
+ dict(name='kpt-34', id=34, color=[255, 0, 0], type='', swap='kpt-45'),
+ 35:
+ dict(name='kpt-35', id=35, color=[255, 0, 0], type='', swap='kpt-44'),
+ 36:
+ dict(name='kpt-36', id=36, color=[255, 0, 0], type='', swap='kpt-43'),
+ 37: dict(
+ name='kpt-37', id=37, color=[255, 0, 0], type='', swap='kpt-42'),
+ 38: dict(
+ name='kpt-38', id=38, color=[255, 0, 0], type='', swap='kpt-50'),
+ 39: dict(
+ name='kpt-39', id=39, color=[255, 0, 0], type='', swap='kpt-49'),
+ 40: dict(
+ name='kpt-40', id=40, color=[255, 0, 0], type='', swap='kpt-48'),
+ 41: dict(
+ name='kpt-41', id=41, color=[255, 0, 0], type='', swap='kpt-47'),
+ 42: dict(
+ name='kpt-42', id=42, color=[255, 0, 0], type='', swap='kpt-37'),
+ 43: dict(
+ name='kpt-43', id=43, color=[255, 0, 0], type='', swap='kpt-36'),
+ 44: dict(
+ name='kpt-44', id=44, color=[255, 0, 0], type='', swap='kpt-35'),
+ 45: dict(
+ name='kpt-45', id=45, color=[255, 0, 0], type='', swap='kpt-34'),
+ 46: dict(
+ name='kpt-46', id=46, color=[255, 0, 0], type='', swap='kpt-33'),
+ 47: dict(
+ name='kpt-47', id=47, color=[255, 0, 0], type='', swap='kpt-41'),
+ 48: dict(
+ name='kpt-48', id=48, color=[255, 0, 0], type='', swap='kpt-40'),
+ 49: dict(
+ name='kpt-49', id=49, color=[255, 0, 0], type='', swap='kpt-39'),
+ 50: dict(
+ name='kpt-50', id=50, color=[255, 0, 0], type='', swap='kpt-38'),
+ 51: dict(name='kpt-51', id=51, color=[255, 0, 0], type='', swap=''),
+ 52: dict(name='kpt-52', id=52, color=[255, 0, 0], type='', swap=''),
+ 53: dict(name='kpt-53', id=53, color=[255, 0, 0], type='', swap=''),
+ 54: dict(name='kpt-54', id=54, color=[255, 0, 0], type='', swap=''),
+ 55: dict(
+ name='kpt-55', id=55, color=[255, 0, 0], type='', swap='kpt-59'),
+ 56: dict(
+ name='kpt-56', id=56, color=[255, 0, 0], type='', swap='kpt-58'),
+ 57: dict(name='kpt-57', id=57, color=[255, 0, 0], type='', swap=''),
+ 58: dict(
+ name='kpt-58', id=58, color=[255, 0, 0], type='', swap='kpt-56'),
+ 59: dict(
+ name='kpt-59', id=59, color=[255, 0, 0], type='', swap='kpt-55'),
+ 60: dict(
+ name='kpt-60', id=60, color=[255, 0, 0], type='', swap='kpt-72'),
+ 61: dict(
+ name='kpt-61', id=61, color=[255, 0, 0], type='', swap='kpt-71'),
+ 62: dict(
+ name='kpt-62', id=62, color=[255, 0, 0], type='', swap='kpt-70'),
+ 63: dict(
+ name='kpt-63', id=63, color=[255, 0, 0], type='', swap='kpt-69'),
+ 64: dict(
+ name='kpt-64', id=64, color=[255, 0, 0], type='', swap='kpt-68'),
+ 65: dict(
+ name='kpt-65', id=65, color=[255, 0, 0], type='', swap='kpt-75'),
+ 66: dict(
+ name='kpt-66', id=66, color=[255, 0, 0], type='', swap='kpt-74'),
+ 67: dict(
+ name='kpt-67', id=67, color=[255, 0, 0], type='', swap='kpt-73'),
+ 68: dict(
+ name='kpt-68', id=68, color=[255, 0, 0], type='', swap='kpt-64'),
+ 69: dict(
+ name='kpt-69', id=69, color=[255, 0, 0], type='', swap='kpt-63'),
+ 70: dict(
+ name='kpt-70', id=70, color=[255, 0, 0], type='', swap='kpt-62'),
+ 71: dict(
+ name='kpt-71', id=71, color=[255, 0, 0], type='', swap='kpt-61'),
+ 72: dict(
+ name='kpt-72', id=72, color=[255, 0, 0], type='', swap='kpt-60'),
+ 73: dict(
+ name='kpt-73', id=73, color=[255, 0, 0], type='', swap='kpt-67'),
+ 74: dict(
+ name='kpt-74', id=74, color=[255, 0, 0], type='', swap='kpt-66'),
+ 75: dict(
+ name='kpt-75', id=75, color=[255, 0, 0], type='', swap='kpt-65'),
+ 76: dict(
+ name='kpt-76', id=76, color=[255, 0, 0], type='', swap='kpt-82'),
+ 77: dict(
+ name='kpt-77', id=77, color=[255, 0, 0], type='', swap='kpt-81'),
+ 78: dict(
+ name='kpt-78', id=78, color=[255, 0, 0], type='', swap='kpt-80'),
+ 79: dict(name='kpt-79', id=79, color=[255, 0, 0], type='', swap=''),
+ 80: dict(
+ name='kpt-80', id=80, color=[255, 0, 0], type='', swap='kpt-78'),
+ 81: dict(
+ name='kpt-81', id=81, color=[255, 0, 0], type='', swap='kpt-77'),
+ 82: dict(
+ name='kpt-82', id=82, color=[255, 0, 0], type='', swap='kpt-76'),
+ 83: dict(
+ name='kpt-83', id=83, color=[255, 0, 0], type='', swap='kpt-87'),
+ 84: dict(
+ name='kpt-84', id=84, color=[255, 0, 0], type='', swap='kpt-86'),
+ 85: dict(name='kpt-85', id=85, color=[255, 0, 0], type='', swap=''),
+ 86: dict(
+ name='kpt-86', id=86, color=[255, 0, 0], type='', swap='kpt-84'),
+ 87: dict(
+ name='kpt-87', id=87, color=[255, 0, 0], type='', swap='kpt-83'),
+ 88: dict(
+ name='kpt-88', id=88, color=[255, 0, 0], type='', swap='kpt-92'),
+ 89: dict(
+ name='kpt-89', id=89, color=[255, 0, 0], type='', swap='kpt-91'),
+ 90: dict(name='kpt-90', id=90, color=[255, 0, 0], type='', swap=''),
+ 91: dict(
+ name='kpt-91', id=91, color=[255, 0, 0], type='', swap='kpt-89'),
+ 92: dict(
+ name='kpt-92', id=92, color=[255, 0, 0], type='', swap='kpt-88'),
+ 93: dict(
+ name='kpt-93', id=93, color=[255, 0, 0], type='', swap='kpt-95'),
+ 94: dict(name='kpt-94', id=94, color=[255, 0, 0], type='', swap=''),
+ 95: dict(
+ name='kpt-95', id=95, color=[255, 0, 0], type='', swap='kpt-93'),
+ 96: dict(
+ name='kpt-96', id=96, color=[255, 0, 0], type='', swap='kpt-97'),
+ 97: dict(
+ name='kpt-97', id=97, color=[255, 0, 0], type='', swap='kpt-96')
+ },
+ skeleton_info={},
+ joint_weights=[1.] * 98,
+ sigmas=[])
diff --git a/configs/_base_/datasets/zebra.py b/configs/_base_/datasets/zebra.py
new file mode 100644
index 0000000000000000000000000000000000000000..eac71f796a761bbf87b123f8b7b8b4585df0c525
--- /dev/null
+++ b/configs/_base_/datasets/zebra.py
@@ -0,0 +1,64 @@
+dataset_info = dict(
+ dataset_name='zebra',
+ paper_info=dict(
+ author='Graving, Jacob M and Chae, Daniel and Naik, Hemal and '
+ 'Li, Liang and Koger, Benjamin and Costelloe, Blair R and '
+ 'Couzin, Iain D',
+ title='DeepPoseKit, a software toolkit for fast and robust '
+ 'animal pose estimation using deep learning',
+ container='Elife',
+ year='2019',
+ homepage='https://github.com/jgraving/DeepPoseKit-Data',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='snout', id=0, color=[255, 255, 255], type='', swap=''),
+ 1:
+ dict(name='head', id=1, color=[255, 255, 255], type='', swap=''),
+ 2:
+ dict(name='neck', id=2, color=[255, 255, 255], type='', swap=''),
+ 3:
+ dict(
+ name='forelegL1',
+ id=3,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegR1'),
+ 4:
+ dict(
+ name='forelegR1',
+ id=4,
+ color=[255, 255, 255],
+ type='',
+ swap='forelegL1'),
+ 5:
+ dict(
+ name='hindlegL1',
+ id=5,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegR1'),
+ 6:
+ dict(
+ name='hindlegR1',
+ id=6,
+ color=[255, 255, 255],
+ type='',
+ swap='hindlegL1'),
+ 7:
+ dict(name='tailbase', id=7, color=[255, 255, 255], type='', swap=''),
+ 8:
+ dict(name='tailtip', id=8, color=[255, 255, 255], type='', swap='')
+ },
+ skeleton_info={
+ 0: dict(link=('head', 'snout'), id=0, color=[255, 255, 255]),
+ 1: dict(link=('neck', 'head'), id=1, color=[255, 255, 255]),
+ 2: dict(link=('forelegL1', 'neck'), id=2, color=[255, 255, 255]),
+ 3: dict(link=('forelegR1', 'neck'), id=3, color=[255, 255, 255]),
+ 4: dict(link=('hindlegL1', 'tailbase'), id=4, color=[255, 255, 255]),
+ 5: dict(link=('hindlegR1', 'tailbase'), id=5, color=[255, 255, 255]),
+ 6: dict(link=('tailbase', 'neck'), id=6, color=[255, 255, 255]),
+ 7: dict(link=('tailtip', 'tailbase'), id=7, color=[255, 255, 255])
+ },
+ joint_weights=[1.] * 9,
+ sigmas=[])
diff --git a/configs/_base_/default_runtime.py b/configs/_base_/default_runtime.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f27c0345a6cf1b7bc4b035eb456e2c9f3126804
--- /dev/null
+++ b/configs/_base_/default_runtime.py
@@ -0,0 +1,54 @@
+default_scope = 'mmpose'
+
+# hooks
+default_hooks = dict(
+ timer=dict(type='IterTimerHook'),
+ logger=dict(type='LoggerHook', interval=50),
+ param_scheduler=dict(type='ParamSchedulerHook'),
+ checkpoint=dict(type='CheckpointHook', interval=10),
+ sampler_seed=dict(type='DistSamplerSeedHook'),
+ visualization=dict(type='PoseVisualizationHook', enable=False),
+ badcase=dict(
+ type='BadCaseAnalysisHook',
+ enable=False,
+ out_dir='badcase',
+ metric_type='loss',
+ badcase_thr=5))
+
+# custom hooks
+custom_hooks = [
+ # Synchronize model buffers such as running_mean and running_var in BN
+ # at the end of each epoch
+ dict(type='SyncBuffersHook')
+]
+
+# multi-processing backend
+env_cfg = dict(
+ cudnn_benchmark=False,
+ mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0),
+ dist_cfg=dict(backend='nccl'),
+)
+
+# visualizer
+vis_backends = [
+ dict(type='LocalVisBackend'),
+ # dict(type='TensorboardVisBackend'),
+ # dict(type='WandbVisBackend'),
+]
+visualizer = dict(
+ type='PoseLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# logger
+log_processor = dict(
+ type='LogProcessor', window_size=50, by_epoch=True, num_digits=6)
+log_level = 'INFO'
+load_from = None
+resume = False
+
+# file I/O backend
+backend_args = dict(backend='local')
+
+# training/validation/testing progress
+train_cfg = dict(by_epoch=True)
+val_cfg = dict()
+test_cfg = dict()
diff --git a/configs/animal_2d_keypoint/README.md b/configs/animal_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..efcc3841a51c20d776360c99eccfaeb94247ff0d
--- /dev/null
+++ b/configs/animal_2d_keypoint/README.md
@@ -0,0 +1,20 @@
+# 2D Animal Keypoint Detection
+
+2D animal keypoint detection (animal pose estimation) aims to detect the key-point of different species, including rats,
+dogs, macaques, and cheetah. It provides detailed behavioral analysis for neuroscience, medical and ecology applications.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_animal_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [DEMO](/demo/docs/en/2d_animal_demo.md) to generate fancy demos.
+
+
+ +

+ +

+ +

diff --git a/configs/animal_2d_keypoint/rtmpose/README.md b/configs/animal_2d_keypoint/rtmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..fbb103e36c5c9e66292904d15c8db467ce18f3b4 --- /dev/null +++ b/configs/animal_2d_keypoint/rtmpose/README.md @@ -0,0 +1,16 @@ +# RTMPose + +Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency. +In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose. +Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves **67.0% AP** on COCO-WholeBody with **130+ FPS**, outperforming existing open-source libraries. +To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device. + +## Results and Models + +### AP-10K Dataset + +Results on AP-10K validation set + +| Model | Input Size | AP | Details and Download | +| :-------: | :--------: | :---: | :------------------------------------------: | +| RTMPose-m | 256x256 | 0.722 | [rtmpose_cp10k.md](./ap10k/rtmpose_ap10k.md) | diff --git a/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose-m_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose-m_8xb64-210e_ap10k-256x256.py new file mode 100644 index 0000000000000000000000000000000000000000..0e8c007b311f07d3a838d015d37b88fc11f760e2 --- /dev/null +++ b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose-m_8xb64-210e_ap10k-256x256.py @@ -0,0 +1,245 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 210 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=512) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(256, 256), + sigma=(5.66, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'AP10KDataset' +data_mode = 'topdown' +data_root = 'data/ap10k/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/pose/ap10k/', +# f'{data_root}': 's3://openmmlab/datasets/pose/ap10k/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/ap10k-train-split1.json', + data_prefix=dict(img='data/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/ap10k-val-split1.json', + data_prefix=dict(img='data/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/ap10k-test-split1.json', + data_prefix=dict(img='data/'), + test_mode=True, + pipeline=val_pipeline, + )) + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/ap10k-val-split1.json') +test_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/ap10k-test-split1.json') diff --git a/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.md b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.md new file mode 100644 index 0000000000000000000000000000000000000000..4d035a372572aaac93ff980acbb367a1cc6a5efa --- /dev/null +++ b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.md @@ -0,0 +1,25 @@ + + + + +
+
+
+Results on AP-10K validation set
+
+| Arch | Input Size | AP | AP50 | AP75 | APM | APL | ckpt | log |
+| :----------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :------------: | :------------: | :-----------------------------------------: | :----------------------------------------: |
+| [rtmpose-m](/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose-m_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.722 | 0.939 | 0.788 | 0.569 | 0.728 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.json) |
diff --git a/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.yml b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0441d9e65faa6b0274f9152ff31ef1b66a112214
--- /dev/null
+++ b/configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose-m_8xb64-210e_ap10k-256x256.py
+ In Collection: RTMPose
+ Alias: animal
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: AP-10K
+ Name: rtmpose-m_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.722
+ AP@0.5: 0.939
+ AP@0.75: 0.788
+ AP (L): 0.728
+ AP (M): 0.569
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/README.md b/configs/animal_2d_keypoint/topdown_heatmap/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..90a440dc286ef02104ed7bbf59a606a030f7a68e
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/README.md
@@ -0,0 +1,68 @@
+# Top-down heatmap-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the
+likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html).
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+ +
+
+
+## Results and Models
+
+### Animal-Pose Dataset
+
+Results on AnimalPose validation set (1117 instances)
+
+| Model | Input Size | AP | AR | Details and Download |
+| :--------: | :--------: | :---: | :---: | :-------------------------------------------------------: |
+| HRNet-w32 | 256x256 | 0.740 | 0.780 | [hrnet_animalpose.md](./animalpose/hrnet_animalpose.md) |
+| HRNet-w48 | 256x256 | 0.738 | 0.778 | [hrnet_animalpose.md](./animalpose/hrnet_animalpose.md) |
+| ResNet-152 | 256x256 | 0.704 | 0.748 | [resnet_animalpose.md](./animalpose/resnet_animalpose.md) |
+| ResNet-101 | 256x256 | 0.696 | 0.736 | [resnet_animalpose.md](./animalpose/resnet_animalpose.md) |
+| ResNet-50 | 256x256 | 0.691 | 0.736 | [resnet_animalpose.md](./animalpose/resnet_animalpose.md) |
+
+### AP-10K Dataset
+
+Results on AP-10K validation set
+
+| Model | Input Size | AP | Details and Download |
+| :--------: | :--------: | :---: | :--------------------------------------------------: |
+| HRNet-w48 | 256x256 | 0.728 | [hrnet_ap10k.md](./ap10k/hrnet_ap10k.md) |
+| HRNet-w32 | 256x256 | 0.722 | [hrnet_ap10k.md](./ap10k/hrnet_ap10k.md) |
+| ResNet-101 | 256x256 | 0.681 | [resnet_ap10k.md](./ap10k/resnet_ap10k.md) |
+| ResNet-50 | 256x256 | 0.680 | [resnet_ap10k.md](./ap10k/resnet_ap10k.md) |
+| CSPNeXt-m | 256x256 | 0.703 | [cspnext_udp_ap10k.md](./ap10k/cspnext_udp_ap10k.md) |
+
+### Desert Locust Dataset
+
+Results on Desert Locust test set
+
+| Model | Input Size | AUC | EPE | Details and Download |
+| :--------: | :--------: | :---: | :--: | :-------------------------------------------: |
+| ResNet-152 | 160x160 | 0.925 | 1.49 | [resnet_locust.md](./locust/resnet_locust.md) |
+| ResNet-101 | 160x160 | 0.907 | 2.03 | [resnet_locust.md](./locust/resnet_locust.md) |
+| ResNet-50 | 160x160 | 0.900 | 2.27 | [resnet_locust.md](./locust/resnet_locust.md) |
+
+### Grévy’s Zebra Dataset
+
+Results on Grévy’s Zebra test set
+
+| Model | Input Size | AUC | EPE | Details and Download |
+| :--------: | :--------: | :---: | :--: | :----------------------------------------: |
+| ResNet-152 | 160x160 | 0.921 | 1.67 | [resnet_zebra.md](./zebra/resnet_zebra.md) |
+| ResNet-101 | 160x160 | 0.915 | 1.83 | [resnet_zebra.md](./zebra/resnet_zebra.md) |
+| ResNet-50 | 160x160 | 0.914 | 1.87 | [resnet_zebra.md](./zebra/resnet_zebra.md) |
+
+### Animal-Kingdom Dataset
+
+Results on AnimalKingdom test set
+
+| Model | Input Size | class | PCK(0.05) | Details and Download |
+| :-------: | :--------: | :-----------: | :-------: | :---------------------------------------------------: |
+| HRNet-w32 | 256x256 | P1 | 0.6323 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P2 | 0.3741 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P3_mammals | 0.571 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P3_amphibians | 0.5358 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P3_reptiles | 0.51 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P3_birds | 0.7671 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
+| HRNet-w32 | 256x256 | P3_fishes | 0.6406 | [hrnet_animalkingdom.md](./ak/hrnet_animalkingdom.md) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.md b/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.md
new file mode 100644
index 0000000000000000000000000000000000000000..f32fb49d90f213a8511b8b09e340a9773907b9b1
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.md
@@ -0,0 +1,47 @@
+
+
+
+
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on AnimalKingdom validation set
+
+| Arch | Input Size | PCK(0.05) | Official Repo | Paper | ckpt | log |
+| ------------------------------------------------------ | ---------- | --------- | ------------- | ------ | ------------------------------------------------------ | ------------------------------------------------------ |
+| [P1_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256.py) | 256x256 | 0.6323 | 0.6342 | 0.6606 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256-08bf96cb_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256-08bf96cb_20230519.json) |
+| [P2_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256.py) | 256x256 | 0.3741 | 0.3726 | 0.393 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256-2396cc58_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256-2396cc58_20230519.json) |
+| [P3_mammals_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256.py) | 256x256 | 0.571 | 0.5719 | 0.6159 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256-e8aadf02_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256-e8aadf02_20230519.json) |
+| [P3_amphibians_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256.py) | 256x256 | 0.5358 | 0.5432 | 0.5674 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256-845085f9_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256-845085f9_20230519.json) |
+| [P3_reptiles_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256.py) | 256x256 | 0.51 | 0.5 | 0.5606 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256-e8440c16_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256-e8440c16_20230519.json) |
+| [P3_birds_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256.py) | 256x256 | 0.7671 | 0.7636 | 0.7735 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256-566feff5_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256-566feff5_20230519.json) |
+| [P3_fishes_hrnet_w32](configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256.py) | 256x256 | 0.6406 | 0.636 | 0.6825 | [ckpt](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256-76c3999f_20230519.pth) | [log](https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256-76c3999f_20230519.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.yml b/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.yml
new file mode 100644
index 0000000000000000000000000000000000000000..12f208a10b7a784e1a9faf444845c128bdfb4e88
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.yml
@@ -0,0 +1,86 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: AnimalKingdom_P1
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.6323
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256-08bf96cb_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P2
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.3741
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256-2396cc58_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P3_amphibian
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.5358
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256-845085f9_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P3_bird
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.7671
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256-566feff5_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P3_fish
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.6406
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256-76c3999f_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P3_mammal
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.571
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256-e8aadf02_20230519.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AnimalKingdom_P3_reptile
+ Name: td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256
+ Results:
+ - Dataset: AnimalKingdom
+ Metrics:
+ PCK: 0.51
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/animal_2d_keypoint/topdown_heatmap/animal_kingdom/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256-e8440c16_20230519.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..0e7eb0136e9f8476c6863b52e9c2a366b7245fc3
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P1-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P1/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P1/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..f42057f8aa91de0ae2a234c7625dce725adf204b
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P2-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P2/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P2/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..5a83e7a97b9478031f7ca4dcc4dccba0350d432d
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_amphibian-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_amphibian/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_amphibian/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ca3c91af610fe995aa24106e0bc6f72b012f9228
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_bird-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_bird/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_bird/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..3923f30d104b22c21a4f1b1252a09e3fcbfb99fd
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_fish-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_fish/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_fish/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..d061c4b6fbc2e01a0b30241cca7fd5212fe29eca
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_mammal-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_mammal/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_mammal/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..b06a49936bad84e9e01cd5510e779e1909d56520
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ak/td-hm_hrnet-w32_8xb32-300e_animalkingdom_P3_reptile-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=23,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalKingdomDataset'
+data_mode = 'topdown'
+data_root = 'data/ak/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_reptile/train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ak_P3_reptile/test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [dict(type='PCKAccuracy', thr=0.05), dict(type='AUC')]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.md b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..58b971313fbf4a446a2c9720ac0a687fcc956513
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.md
@@ -0,0 +1,40 @@
+
+
+AnimalKingdom (CVPR'2022)
+ +```bibtex +@InProceedings{ + Ng_2022_CVPR, + author = {Ng, Xun Long and Ong, Kian Eng and Zheng, Qichen and Ni, Yun and Yeo, Si Yong and Liu, Jun}, + title = {Animal Kingdom: A Large and Diverse Dataset for Animal Behavior Understanding}, + booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2022}, + pages = {19023-19034} + } +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on AnimalPose validation set (1117 instances)
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32](/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py) | 256x256 | 0.740 | 0.959 | 0.833 | 0.780 | 0.965 | [ckpt](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth) | [log](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256_20210426.log.json) |
+| [pose_hrnet_w48](/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w48_8xb64-210e_animalpose-256x256.py) | 256x256 | 0.738 | 0.958 | 0.831 | 0.778 | 0.962 | [ckpt](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_animalpose_256x256-34644726_20210426.pth) | [log](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_animalpose_256x256_20210426.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.yml b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..caba133370aafff30be90aa9171f8df66fefe7f4
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.yml
@@ -0,0 +1,34 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: Animal-Pose
+ Name: td-hm_hrnet-w32_8xb64-210e_animalpose-256x256
+ Results:
+ - Dataset: Animal-Pose
+ Metrics:
+ AP: 0.740
+ AP@0.5: 0.959
+ AP@0.75: 0.833
+ AR: 0.780
+ AR@0.5: 0.965
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w48_8xb64-210e_animalpose-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: Animal-Pose
+ Name: td-hm_hrnet-w48_8xb64-210e_animalpose-256x256
+ Results:
+ - Dataset: Animal-Pose
+ Metrics:
+ AP: 0.738
+ AP@0.5: 0.958
+ AP@0.75: 0.831
+ AR: 0.778
+ AR@0.5: 0.962
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_animalpose_256x256-34644726_20210426.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.md b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..20ddf54031e18f8bb9150fccfccff1f6cd5949bf
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.md
@@ -0,0 +1,41 @@
+
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+Results on AnimalPose validation set (1117 instances)
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50](/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res50_8xb64-210e_animalpose-256x256.py) | 256x256 | 0.691 | 0.947 | 0.770 | 0.736 | 0.955 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res50_animalpose_256x256-e1f30bff_20210426.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res50_animalpose_256x256_20210426.log.json) |
+| [pose_resnet_101](/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res101_8xb64-210e_animalpose-256x256.py) | 256x256 | 0.696 | 0.948 | 0.774 | 0.736 | 0.951 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res101_animalpose_256x256-85563f4a_20210426.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res101_animalpose_256x256_20210426.log.json) |
+| [pose_resnet_152](/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res152_8xb32-210e_animalpose-256x256.py) | 256x256 | 0.704 | 0.938 | 0.786 | 0.748 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res152_animalpose_256x256-a0a7506c_20210426.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res152_animalpose_256x256_20210426.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.yml b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..345c13c138aafccb5ce1be0ea4136634327248c8
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.yml
@@ -0,0 +1,51 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res50_8xb64-210e_animalpose-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: Animal-Pose
+ Name: td-hm_res50_8xb64-210e_animalpose-256x256
+ Results:
+ - Dataset: Animal-Pose
+ Metrics:
+ AP: 0.691
+ AP@0.5: 0.947
+ AP@0.75: 0.770
+ AR: 0.736
+ AR@0.5: 0.955
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res50_animalpose_256x256-e1f30bff_20210426.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res101_8xb64-210e_animalpose-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: Animal-Pose
+ Name: td-hm_res101_8xb64-210e_animalpose-256x256
+ Results:
+ - Dataset: Animal-Pose
+ Metrics:
+ AP: 0.696
+ AP@0.5: 0.948
+ AP@0.75: 0.774
+ AR: 0.736
+ AR@0.5: 0.951
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res101_animalpose_256x256-85563f4a_20210426.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res152_8xb32-210e_animalpose-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: Animal-Pose
+ Name: td-hm_res152_8xb32-210e_animalpose-256x256
+ Results:
+ - Dataset: Animal-Pose
+ Metrics:
+ AP: 0.704
+ AP@0.5: 0.938
+ AP@0.75: 0.786
+ AR: 0.748
+ AR@0.5: 0.946
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res152_animalpose_256x256-a0a7506c_20210426.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..2680fe8956e7b1cbf186b1c536204917478d721f
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py
@@ -0,0 +1,147 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=20,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/animalpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric', ann_file=data_root + 'annotations/animalpose_val.json')
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w48_8xb64-210e_animalpose-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w48_8xb64-210e_animalpose-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d4a76d8f506c60493ef7e476cb5ed3310044ba2
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w48_8xb64-210e_animalpose-256x256.py
@@ -0,0 +1,147 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=20,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/animalpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric', ann_file=data_root + 'annotations/animalpose_val.json')
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res101_8xb64-210e_animalpose-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res101_8xb64-210e_animalpose-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..8ffaabb06f160fb66260507db057686f4621b6b2
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res101_8xb64-210e_animalpose-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=20,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/animalpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric', ann_file=data_root + 'annotations/animalpose_val.json')
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res152_8xb32-210e_animalpose-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res152_8xb32-210e_animalpose-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..8ed92929c9d42fa0caad87a5f6292f75745bd0bf
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res152_8xb32-210e_animalpose-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=20,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/animalpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric', ann_file=data_root + 'annotations/animalpose_val.json')
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res50_8xb64-210e_animalpose-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res50_8xb64-210e_animalpose-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..c053c8881461de72345478da49293a6ca96c1ed4
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_res50_8xb64-210e_animalpose-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=20,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AnimalPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/animalpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/animalpose_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric', ann_file=data_root + 'annotations/animalpose_val.json')
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext-m_udp_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext-m_udp_8xb64-210e_ap10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..844d17df4ef919ac0c2a9a14bfc966da14752286
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext-m_udp_8xb64-210e_ap10k-256x256.py
@@ -0,0 +1,220 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'AP10KDataset'
+data_mode = 'topdown'
+data_root = 'data/ap10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-train-split1.json',
+ data_prefix=dict(img='data/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-val-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-test-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-val-split1.json')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-test-split1.json')
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.md b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..fb10359685ecf9b546093b402c292c4c8a8ba0a9
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.md
@@ -0,0 +1,58 @@
+
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on AP-10K validation set
+
+| Arch | Input Size | AP | AP50 | AP75 | APM | APL | ckpt | log |
+| :----------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :------------: | :------------: | :-----------------------------------------: | :----------------------------------------: |
+| [pose_cspnext_m](/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext-m_udp_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.703 | 0.944 | 0.776 | 0.513 | 0.710 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-ap10k_pt-in1k_210e-256x256-1f2d947a_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-ap10k_pt-in1k_210e-256x256-1f2d947a_20230123.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.yml b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..8fedc88374a9c027ed3f3268a42b5eed24a980f0
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext-m_udp_8xb64-210e_ap10k-256x256.py
+ In Collection: UDP
+ Metadata:
+ Architecture: &id001
+ - UDP
+ - HRNet
+ Training Data: AP-10K
+ Name: cspnext-m_udp_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.703
+ AP@0.5: 0.944
+ AP@0.75: 0.776
+ AP (L): 0.71
+ AP (M): 0.513
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-ap10k_pt-in1k_210e-256x256-1f2d947a_20230123.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.md b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..fbdd2cbf9f54807a8fcc00adc31f5839fcf94ea1
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.md
@@ -0,0 +1,41 @@
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on AP-10K validation set
+
+| Arch | Input Size | AP | AP50 | AP75 | APM | APL | ckpt | log |
+| :----------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :------------: | :------------: | :-----------------------------------------: | :----------------------------------------: |
+| [pose_hrnet_w32](/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w32_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.722 | 0.935 | 0.789 | 0.557 | 0.729 | [ckpt](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_ap10k_256x256-18aac840_20211029.pth) | [log](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_ap10k_256x256-18aac840_20211029.log.json) |
+| [pose_hrnet_w48](/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w48_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.728 | 0.936 | 0.802 | 0.577 | 0.735 | [ckpt](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_ap10k_256x256-d95ab412_20211029.pth) | [log](https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_ap10k_256x256-d95ab412_20211029.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.yml b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..38aade8349ed34a214139574c0e83ae67b37e630
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.yml
@@ -0,0 +1,34 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w32_8xb64-210e_ap10k-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: AP-10K
+ Name: td-hm_hrnet-w32_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.722
+ AP@0.5: 0.935
+ AP@0.75: 0.789
+ AP (L): 0.729
+ AP (M): 0.557
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_ap10k_256x256-18aac840_20211029.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w48_8xb64-210e_ap10k-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: AP-10K
+ Name: td-hm_hrnet-w48_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.728
+ AP@0.5: 0.936
+ AP@0.75: 0.802
+ AP (L): 0.735
+ AP (M): 0.577
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w48_ap10k_256x256-d95ab412_20211029.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.md b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..11ad6ed033516732bb921f0b32ed1d7336e6517b
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.md
@@ -0,0 +1,41 @@
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+Results on AP-10K validation set
+
+| Arch | Input Size | AP | AP50 | AP75 | APM | APL | ckpt | log |
+| :----------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :------------: | :------------: | :-----------------------------------------: | :----------------------------------------: |
+| [pose_resnet_50](/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res50_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.680 | 0.926 | 0.738 | 0.552 | 0.687 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res50_ap10k_256x256-35760eb8_20211029.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res50_ap10k_256x256-35760eb8_20211029.log.json) |
+| [pose_resnet_101](/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res101_8xb64-210e_ap10k-256x256.py) | 256x256 | 0.681 | 0.921 | 0.751 | 0.545 | 0.690 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res101_ap10k_256x256-9edfafb9_20211029.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res101_ap10k_256x256-9edfafb9_20211029.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.yml b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..84cc4156b9447dacdf0554851602cc2c907814c9
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.yml
@@ -0,0 +1,35 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res50_8xb64-210e_ap10k-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: AP-10K
+ Name: td-hm_res50_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.680
+ AP@0.5: 0.926
+ AP@0.75: 0.738
+ AP (L): 0.687
+ AP (M): 0.552
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res50_ap10k_256x256-35760eb8_20211029.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res101_8xb64-210e_ap10k-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: AP-10K
+ Name: td-hm_res101_8xb64-210e_ap10k-256x256
+ Results:
+ - Dataset: AP-10K
+ Metrics:
+ AP: 0.681
+ AP@0.5: 0.921
+ AP@0.75: 0.751
+ AP (L): 0.690
+ AP (M): 0.545
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res101_ap10k_256x256-9edfafb9_20211029.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w32_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w32_8xb64-210e_ap10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..c61e6384aeea7efcca3ac2f2268fef01663e3234
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w32_8xb64-210e_ap10k-256x256.py
@@ -0,0 +1,164 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AP10KDataset'
+data_mode = 'topdown'
+data_root = 'data/ap10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-train-split1.json',
+ data_prefix=dict(img='data/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-val-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-test-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-val-split1.json')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-test-split1.json')
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w48_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w48_8xb64-210e_ap10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..146114a887663a230f7a504e83f13da6fa4a2571
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_hrnet-w48_8xb64-210e_ap10k-256x256.py
@@ -0,0 +1,164 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AP10KDataset'
+data_mode = 'topdown'
+data_root = 'data/ap10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-train-split1.json',
+ data_prefix=dict(img='data/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-val-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-test-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-val-split1.json')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-test-split1.json')
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res101_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res101_8xb64-210e_ap10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..be49577511584f892cc4c82797207e8ee1d6a8b4
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res101_8xb64-210e_ap10k-256x256.py
@@ -0,0 +1,135 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AP10KDataset'
+data_mode = 'topdown'
+data_root = 'data/ap10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-train-split1.json',
+ data_prefix=dict(img='data/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-val-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-test-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-val-split1.json')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-test-split1.json')
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res50_8xb64-210e_ap10k-256x256.py b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res50_8xb64-210e_ap10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..2172cbe938506ae2faa08ed731710e51203d579f
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/ap10k/td-hm_res50_8xb64-210e_ap10k-256x256.py
@@ -0,0 +1,135 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AP10KDataset'
+data_mode = 'topdown'
+data_root = 'data/ap10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-train-split1.json',
+ data_prefix=dict(img='data/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-val-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ap10k-test-split1.json',
+ data_prefix=dict(img='data/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-val-split1.json')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ap10k-test-split1.json')
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.md b/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.md
new file mode 100644
index 0000000000000000000000000000000000000000..bb7c8374926f95a1e726973f2bddc8af04a702ed
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.md
@@ -0,0 +1,43 @@
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+Results on Desert Locust test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_resnet_50](/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res50_8xb64-210e_locust-160x160.py) | 160x160 | 1.000 | 0.900 | 2.27 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res50_locust_160x160-9efca22b_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res50_locust_160x160_20210407.log.json) |
+| [pose_resnet_101](/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res101_8xb64-210e_locust-160x160.py) | 160x160 | 1.000 | 0.907 | 2.03 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res101_locust_160x160-d77986b3_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res101_locust_160x160_20210407.log.json) |
+| [pose_resnet_152](/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res152_8xb32-210e_locust-160x160.py) | 160x160 | 1.000 | 0.925 | 1.49 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res152_locust_160x160-4ea9b372_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res152_locust_160x160_20210407.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.yml b/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c7d174fafc5136953beebf9b0dbc8dda5a800199
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.yml
@@ -0,0 +1,45 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res50_8xb64-210e_locust-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: Desert Locust
+ Name: td-hm_res50_8xb64-210e_locust-160x160
+ Results:
+ - Dataset: Desert Locust
+ Metrics:
+ AUC: 0.9
+ EPE: 2.27
+ PCK@0.2: 1
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res50_locust_160x160-9efca22b_20210407.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res101_8xb64-210e_locust-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: Desert Locust
+ Name: td-hm_res101_8xb64-210e_locust-160x160
+ Results:
+ - Dataset: Desert Locust
+ Metrics:
+ AUC: 0.907
+ EPE: 2.03
+ PCK@0.2: 1
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res101_locust_160x160-d77986b3_20210407.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res152_8xb32-210e_locust-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: Desert Locust
+ Name: td-hm_res152_8xb32-210e_locust-160x160
+ Results:
+ - Dataset: Desert Locust
+ Metrics:
+ AUC: 0.925
+ EPE: 1.49
+ PCK@0.2: 1.0
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res152_locust_160x160-4ea9b372_20210407.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res101_8xb64-210e_locust-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res101_8xb64-210e_locust-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..f6e6c2e39bb28913b7ba180d0ab74c71a24c6cb6
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res101_8xb64-210e_locust-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=35,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'LocustDataset'
+data_mode = 'topdown'
+data_root = 'data/locust/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res152_8xb32-210e_locust-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res152_8xb32-210e_locust-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..8f0a58bc88efab80a383df61137dbb45253da636
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res152_8xb32-210e_locust-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=35,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'LocustDataset'
+data_mode = 'topdown'
+data_root = 'data/locust/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res50_8xb64-210e_locust-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res50_8xb64-210e_locust-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..adbb89ee5b23f8697059f6778f1bfe13bd21432a
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/locust/td-hm_res50_8xb64-210e_locust-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=35,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'LocustDataset'
+data_mode = 'topdown'
+data_root = 'data/locust/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/locust_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.md b/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.md
new file mode 100644
index 0000000000000000000000000000000000000000..0c12aed0f3407c5303f66326708ebc2d082c5a1f
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.md
@@ -0,0 +1,43 @@
+
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+Results on Grévy’s Zebra test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_resnet_50](/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res50_8xb64-210e_zebra-160x160.py) | 160x160 | 1.000 | 0.914 | 1.87 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res50_zebra_160x160-5a104833_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res50_zebra_160x160_20210407.log.json) |
+| [pose_resnet_101](/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res101_8xb64-210e_zebra-160x160.py) | 160x160 | 1.000 | 0.915 | 1.83 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res101_zebra_160x160-e8cb2010_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res101_zebra_160x160_20210407.log.json) |
+| [pose_resnet_152](/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res152_8xb32-210e_zebra-160x160.py) | 160x160 | 1.000 | 0.921 | 1.67 | [ckpt](https://download.openmmlab.com/mmpose/animal/resnet/res152_zebra_160x160-05de71dd_20210407.pth) | [log](https://download.openmmlab.com/mmpose/animal/resnet/res152_zebra_160x160_20210407.log.json) |
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.yml b/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3ecedc9700739b50697314df1c4f2f23416f4cfd
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.yml
@@ -0,0 +1,45 @@
+Models:
+- Config: configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res50_8xb64-210e_zebra-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: "Gr\xE9vy\u2019s Zebra"
+ Name: td-hm_res50_8xb64-210e_zebra-160x160
+ Results:
+ - Dataset: "Gr\xE9vy\u2019s Zebra"
+ Metrics:
+ AUC: 0.914
+ EPE: 1.87
+ PCK@0.2: 1.0
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res50_zebra_160x160-5a104833_20210407.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res101_8xb64-210e_zebra-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: "Gr\xE9vy\u2019s Zebra"
+ Name: td-hm_res101_8xb64-210e_zebra-160x160
+ Results:
+ - Dataset: "Gr\xE9vy\u2019s Zebra"
+ Metrics:
+ AUC: 0.915
+ EPE: 1.83
+ PCK@0.2: 1.0
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res101_zebra_160x160-e8cb2010_20210407.pth
+- Config: configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res152_8xb32-210e_zebra-160x160.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: "Gr\xE9vy\u2019s Zebra"
+ Name: td-hm_res152_8xb32-210e_zebra-160x160
+ Results:
+ - Dataset: "Gr\xE9vy\u2019s Zebra"
+ Metrics:
+ AUC: 0.921
+ EPE: 1.67
+ PCK@0.2: 1.0
+ Task: Animal 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/animal/resnet/res152_zebra_160x160-05de71dd_20210407.pth
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res101_8xb64-210e_zebra-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res101_8xb64-210e_zebra-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..68c56d80fb91b068d684ec29b5c77da3e920a71f
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res101_8xb64-210e_zebra-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=9,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'ZebraDataset'
+data_mode = 'topdown'
+data_root = 'data/zebra/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res152_8xb32-210e_zebra-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res152_8xb32-210e_zebra-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..abb14eefb84dd91912f84cf407faeabc83ec5c25
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res152_8xb32-210e_zebra-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=9,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'ZebraDataset'
+data_mode = 'topdown'
+data_root = 'data/zebra/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res50_8xb64-210e_zebra-160x160.py b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res50_8xb64-210e_zebra-160x160.py
new file mode 100644
index 0000000000000000000000000000000000000000..e4d2777751d7837e7c892868f3027b145610de24
--- /dev/null
+++ b/configs/animal_2d_keypoint/topdown_heatmap/zebra/td-hm_res50_8xb64-210e_zebra-160x160.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(160, 160), heatmap_size=(40, 40), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=9,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'ZebraDataset'
+data_mode = 'topdown'
+data_root = 'data/zebra/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/zebra_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/README.md b/configs/body_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..d005d3fed76ccdb4260fef2f1a0f2c3466136d67
--- /dev/null
+++ b/configs/body_2d_keypoint/README.md
@@ -0,0 +1,21 @@
+# Human Body 2D Pose Estimation
+
+Multi-person human pose estimation is defined as the task of detecting the poses (or keypoints) of all people from an input image.
+
+Existing approaches can be categorized into top-down and bottom-up approaches.
+
+Top-down methods (e.g. DeepPose) divide the task into two stages: human detection and pose estimation. They perform human detection first, followed by single-person pose estimation given human bounding boxes.
+
+Bottom-up approaches (e.g. Associative Embedding) first detect all the keypoints and then group/associate them into person instances.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_body_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/2d_human_pose_demo.md#2d-human-pose-demo) to run demos.
+
+Grévy’s Zebra (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
diff --git a/configs/body_2d_keypoint/associative_embedding/README.md b/configs/body_2d_keypoint/associative_embedding/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..7f5fa8ea1734e3ef121567aaaa1032fc71b862b2
--- /dev/null
+++ b/configs/body_2d_keypoint/associative_embedding/README.md
@@ -0,0 +1,9 @@
+# Associative embedding: End-to-end learning for joint detection and grouping (AE)
+
+Associative Embedding is one of the most popular 2D bottom-up pose estimation approaches, that first detect all the keypoints and then group/associate them into person instances.
+
+In order to group all the predicted keypoints to individuals, a tag is also predicted for each detected keypoint. Tags of the same person are similar, while tags of different people are different. Thus the keypoints can be grouped according to the tags.
+
++
+ +
+
diff --git a/configs/body_2d_keypoint/associative_embedding/coco/ae_hrnet-w32_8xb24-300e_coco-512x512.py b/configs/body_2d_keypoint/associative_embedding/coco/ae_hrnet-w32_8xb24-300e_coco-512x512.py
new file mode 100644
index 0000000000000000000000000000000000000000..a4804cbe37ec3932d7b1a7d83b89bf286f1c5761
--- /dev/null
+++ b/configs/body_2d_keypoint/associative_embedding/coco/ae_hrnet-w32_8xb24-300e_coco-512x512.py
@@ -0,0 +1,166 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1.5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=300,
+ milestones=[200, 260],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=192)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', interval=50))
+
+# codec settings
+codec = dict(
+ type='AssociativeEmbedding',
+ input_size=(512, 512),
+ heatmap_size=(128, 128),
+ sigma=2,
+ decode_topk=30,
+ decode_center_shift=0.5,
+ decode_keypoint_order=[
+ 0, 1, 2, 3, 4, 5, 6, 11, 12, 7, 8, 9, 10, 13, 14, 15, 16
+ ],
+ decode_max_instances=30)
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='AssociativeEmbeddingHead',
+ in_channels=32,
+ num_keypoints=17,
+ tag_dim=1,
+ tag_per_keypoint=True,
+ deconv_out_channels=None,
+ keypoint_loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ tag_loss=dict(type='AssociativeEmbeddingLoss', loss_weight=0.001),
+ # The heatmap will be resized to the input size before decoding
+ # if ``restore_heatmap_size==True``
+ decoder=dict(codec, heatmap_size=codec['input_size'])),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ shift_heatmap=False,
+ restore_heatmap_size=True,
+ align_corners=False))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = []
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=64,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=24,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none',
+ score_mode='bbox',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.md b/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..caae01d60d592188694ed9da65c8712f4b9a9811
--- /dev/null
+++ b/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.md
@@ -0,0 +1,57 @@
+
+
+
+
+
+
+
+
+Associative Embedding (NIPS'2017)
+ +```bibtex +@inproceedings{newell2017associative, + title={Associative embedding: End-to-end learning for joint detection and grouping}, + author={Newell, Alejandro and Huang, Zhiao and Deng, Jia}, + booktitle={Advances in neural information processing systems}, + pages={2277--2287}, + year={2017} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on COCO val2017 without multi-scale test
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [HRNet-w32](/configs/body_2d_keypoint/associative_embedding/coco/ae_hrnet-w32_8xb24-300e_coco-512x512.py) | 512x512 | 0.656 | 0.864 | 0.719 | 0.711 | 0.893 | [ckpt](https://download.openmmlab.com/mmpose/bottom_up/hrnet_w32_coco_512x512-bcb8c247_20200816.pth) | [log](https://download.openmmlab.com/mmpose/bottom_up/hrnet_w32_coco_512x512_20200816.log.json) |
diff --git a/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.yml b/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..5fcd749f0f78e72ac1cf7c87bd85411d18048723
--- /dev/null
+++ b/configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.yml
@@ -0,0 +1,25 @@
+Collections:
+- Name: AE
+ Paper:
+ Title: "Associative embedding: End-to-end learning for joint detection and grouping"
+ URL: https://arxiv.org/abs/1611.05424
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/associative_embedding.md
+Models:
+- Config: configs/body_2d_keypoint/associative_embedding/coco/ae_hrnet-w32_8xb24-300e_coco-512x512.py
+ In Collection: AE
+ Metadata:
+ Architecture:
+ - AE
+ - HRNet
+ Training Data: COCO
+ Name: ae_hrnet-w32_8xb24-300e_coco-512x512
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.656
+ AP@0.5: 0.864
+ AP@0.75: 0.719
+ AR: 0.711
+ AR@0.5: 0.893
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/bottom_up/hrnet_w32_coco_512x512-bcb8c247_20200816.pth
diff --git a/configs/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512.py b/configs/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512.py
new file mode 100644
index 0000000000000000000000000000000000000000..955293dcb1314f1d57cdb9efc4f62669cf41fabc
--- /dev/null
+++ b/configs/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512.py
@@ -0,0 +1,164 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=140, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=140,
+ milestones=[90, 120],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=160)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='DecoupledHeatmap', input_size=(512, 512), heatmap_size=(128, 128))
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='CIDHead',
+ in_channels=480,
+ num_keypoints=17,
+ gfd_channels=32,
+ coupled_heatmap_loss=dict(type='FocalHeatmapLoss', loss_weight=1.0),
+ decoupled_heatmap_loss=dict(type='FocalHeatmapLoss', loss_weight=4.0),
+ contrastive_loss=dict(
+ type='InfoNCELoss', temperature=0.05, loss_weight=1.0),
+ decoder=codec,
+ ),
+ train_cfg=dict(max_train_instances=200),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ shift_heatmap=False,
+ align_corners=False))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='BottomupGetHeatmapMask'),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=64,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=20,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_thr=0.8,
+ score_mode='keypoint',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512.py b/configs/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512.py
new file mode 100644
index 0000000000000000000000000000000000000000..a114088ae217d8c8a2e0d16bab4459e163c6a129
--- /dev/null
+++ b/configs/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512.py
@@ -0,0 +1,164 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=140, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=140,
+ milestones=[90, 120],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=160)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='DecoupledHeatmap', input_size=(512, 512), heatmap_size=(128, 128))
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='CIDHead',
+ in_channels=720,
+ num_keypoints=17,
+ gfd_channels=48,
+ coupled_heatmap_loss=dict(type='FocalHeatmapLoss', loss_weight=1.0),
+ decoupled_heatmap_loss=dict(type='FocalHeatmapLoss', loss_weight=4.0),
+ contrastive_loss=dict(
+ type='InfoNCELoss', temperature=0.05, loss_weight=1.0),
+ decoder=codec,
+ ),
+ train_cfg=dict(max_train_instances=200),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ shift_heatmap=False,
+ align_corners=False))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='BottomupGetHeatmapMask'),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=64,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=20,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_thr=0.8,
+ score_mode='keypoint',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/cid/coco/hrnet_coco.md b/configs/body_2d_keypoint/cid/coco/hrnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..f82cb04db0150ec1b63868ea875c5654fcb800d3
--- /dev/null
+++ b/configs/body_2d_keypoint/cid/coco/hrnet_coco.md
@@ -0,0 +1,42 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+CID (CVPR'2022)
+ +```bibtex +@InProceedings{Wang_2022_CVPR, + author = {Wang, Dongkai and Zhang, Shiliang}, + title = {Contextual Instance Decoupling for Robust Multi-Person Pose Estimation}, + booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2022}, + pages = {11060-11068} +} +``` + +
+
+
+Results on COCO val2017 without multi-scale test
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [CID](/configs/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512.py) | 512x512 | 0.704 | 0.894 | 0.775 | 0.753 | 0.928 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512_42b7e6e6-20230207.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512_20230207.json) |
+| [CID](/configs/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512.py) | 512x512 | 0.715 | 0.900 | 0.782 | 0.765 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512_a36c3ecf-20230207.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512_20230207.json) |
diff --git a/configs/body_2d_keypoint/cid/coco/hrnet_coco.yml b/configs/body_2d_keypoint/cid/coco/hrnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b230d20e247c24d7e3c998714eabbe6b132007dc
--- /dev/null
+++ b/configs/body_2d_keypoint/cid/coco/hrnet_coco.yml
@@ -0,0 +1,41 @@
+Collections:
+- Name: CID
+ Paper:
+ Title: Contextual Instance Decoupling for Robust Multi-Person Pose Estimation
+ URL: https://openaccess.thecvf.com/content/CVPR2022/html/Wang_Contextual_Instance_Decoupling_for_Robust_Multi-Person_Pose_Estimation_CVPR_2022_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/cid.md
+Models:
+- Config: configs/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512.py
+ In Collection: CID
+ Metadata:
+ Architecture: &id001
+ - CID
+ - HRNet
+ Training Data: COCO
+ Name: cid_hrnet-w32_8xb20-140e_coco-512x512
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.704
+ AP@0.5: 0.894
+ AP@0.75: 0.775
+ AR: 0.753
+ AR@0.5: 0.928
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w32_8xb20-140e_coco-512x512_42b7e6e6-20230207.pth
+- Config: configs/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512.py
+ In Collection: CID
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: cid_hrnet-w48_8xb20-140e_coco-512x512
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.715
+ AP@0.5: 0.9
+ AP@0.75: 0.782
+ AR: 0.765
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/cid/coco/cid_hrnet-w48_8xb20-140e_coco-512x512_a36c3ecf-20230207.pth
diff --git a/configs/body_2d_keypoint/dekr/README.md b/configs/body_2d_keypoint/dekr/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..04726421c0d67793dc4d2fc55fcf2cf491d3813e
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/README.md
@@ -0,0 +1,22 @@
+# Bottom-up Human Pose Estimation via Disentangled Keypoint Regression (DEKR)
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+DEKR is a popular 2D bottom-up pose estimation approach that simultaneously detects all the instances and regresses the offsets from the instance centers to joints.
+
+In order to predict the offsets more accurately, the offsets of different joints are regressed using separated branches with deformable convolutional layers. Thus convolution kernels with different shapes are adopted to extract features for the corresponding joint.
diff --git a/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py b/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py
new file mode 100644
index 0000000000000000000000000000000000000000..743de8882cb7293b632fd3f6dedc37b15e9a0a55
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py
@@ -0,0 +1,189 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=140, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=140,
+ milestones=[90, 120],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=80)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='SPR',
+ input_size=(512, 512),
+ heatmap_size=(128, 128),
+ sigma=(4, 2),
+ minimal_diagonal_length=32**0.5,
+ generate_keypoint_heatmaps=True,
+ decode_max_instances=30)
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='DEKRHead',
+ in_channels=480,
+ num_keypoints=17,
+ heatmap_loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ displacement_loss=dict(
+ type='SoftWeightSmoothL1Loss',
+ use_target_weight=True,
+ supervise_empty=False,
+ beta=1 / 9,
+ loss_weight=0.002,
+ ),
+ decoder=codec,
+ # This rescore net is adapted from the official repo.
+ # If you are not using the original COCO dataset for training,
+ # please make sure to remove the `rescore_cfg` item
+ rescore_cfg=dict(
+ in_channels=74,
+ norm_indexes=(5, 6),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/kpt_rescore_coco-33d58c5c.pth')),
+ ),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ nms_dist_thr=0.05,
+ shift_heatmap=True,
+ align_corners=False))
+
+# enable DDP training when rescore net is used
+find_unused_parameters = True
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='BottomupGetHeatmapMask'),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=32,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=10,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none',
+ score_mode='keypoint',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640.py b/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..57f656fb4d4c5f17f50e651ff5b160017d902971
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640.py
@@ -0,0 +1,190 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=140, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=140,
+ milestones=[90, 120],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=80)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='SPR',
+ input_size=(640, 640),
+ heatmap_size=(160, 160),
+ sigma=(4, 2),
+ minimal_diagonal_length=32**0.5,
+ generate_keypoint_heatmaps=True,
+ decode_max_instances=30)
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='DEKRHead',
+ in_channels=720,
+ num_keypoints=17,
+ num_heatmap_filters=48,
+ heatmap_loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ displacement_loss=dict(
+ type='SoftWeightSmoothL1Loss',
+ use_target_weight=True,
+ supervise_empty=False,
+ beta=1 / 9,
+ loss_weight=0.002,
+ ),
+ decoder=codec,
+ # This rescore net is adapted from the official repo.
+ # If you are not using the original COCO dataset for training,
+ # please make sure to remove the `rescore_cfg` item
+ rescore_cfg=dict(
+ in_channels=74,
+ norm_indexes=(5, 6),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/kpt_rescore_coco-33d58c5c.pth')),
+ ),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ nms_dist_thr=0.05,
+ shift_heatmap=True,
+ align_corners=False))
+
+# enable DDP training when rescore net is used
+find_unused_parameters = True
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='BottomupGetHeatmapMask'),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=32,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=10,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none',
+ score_mode='keypoint',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/dekr/coco/hrnet_coco.md b/configs/body_2d_keypoint/dekr/coco/hrnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..648b9bc735eea503707402c9f90f837288872f50
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/coco/hrnet_coco.md
@@ -0,0 +1,58 @@
+
+
+DEKR (CVPR'2021)
+ +```bibtex +@inproceedings{geng2021bottom, + title={Bottom-up human pose estimation via disentangled keypoint regression}, + author={Geng, Zigang and Sun, Ke and Xiao, Bin and Zhang, Zhaoxiang and Wang, Jingdong}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={14676--14686}, + year={2021} +} +``` + +
+
+
+
+
+DEKR (CVPR'2021)
+ +```bibtex +@inproceedings{geng2021bottom, + title={Bottom-up human pose estimation via disentangled keypoint regression}, + author={Geng, Zigang and Sun, Ke and Xiao, Bin and Zhang, Zhaoxiang and Wang, Jingdong}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={14676--14686}, + year={2021} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on COCO val2017 without multi-scale test
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [HRNet-w32](/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py) | 512x512 | 0.686 | 0.868 | 0.750 | 0.735 | 0.898 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512_ac7c17bf-20221228.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512_20221228.json) |
+| [HRNet-w48](/configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640.py) | 640x640 | 0.714 | 0.883 | 0.777 | 0.762 | 0.915 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640_74796c32-20230124.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640_20230124.json) |
diff --git a/configs/body_2d_keypoint/dekr/coco/hrnet_coco.yml b/configs/body_2d_keypoint/dekr/coco/hrnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0246b0723b93e8c04f61324de7add7f1e569ebce
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/coco/hrnet_coco.yml
@@ -0,0 +1,41 @@
+Collections:
+- Name: DEKR
+ Paper:
+ Title: Bottom-up human pose estimation via disentangled keypoint regression
+ URL: https://arxiv.org/abs/2104.02300
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/dekr.md
+Models:
+- Config: configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py
+ In Collection: DEKR
+ Metadata:
+ Architecture: &id001
+ - DEKR
+ - HRNet
+ Training Data: COCO
+ Name: dekr_hrnet-w32_8xb10-140e_coco-512x512
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.686
+ AP@0.5: 0.868
+ AP@0.75: 0.750
+ AR: 0.735
+ AR@0.5: 0.898
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512_ac7c17bf-20221228.pth
+- Config: configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640.py
+ In Collection: DEKR
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: dekr_hrnet-w48_8xb10-140e_coco-640x640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.714
+ AP@0.5: 0.883
+ AP@0.75: 0.777
+ AR: 0.762
+ AR@0.5: 0.915
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w48_8xb10-140e_coco-640x640_74796c32-20230124.pth
diff --git a/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512.py b/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512.py
new file mode 100644
index 0000000000000000000000000000000000000000..c990eecdd09eb74bb53ca29bd69ebc88670c9b2b
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512.py
@@ -0,0 +1,190 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=20)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=300,
+ milestones=[200, 260],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=80)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='SPR',
+ input_size=(512, 512),
+ heatmap_size=(128, 128),
+ sigma=(4, 2),
+ minimal_diagonal_length=32**0.5,
+ generate_keypoint_heatmaps=True,
+ decode_max_instances=30)
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='DEKRHead',
+ in_channels=480,
+ num_keypoints=14,
+ heatmap_loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ displacement_loss=dict(
+ type='SoftWeightSmoothL1Loss',
+ use_target_weight=True,
+ supervise_empty=False,
+ beta=1 / 9,
+ loss_weight=0.004,
+ ),
+ decoder=codec,
+ # This rescore net is adapted from the official repo.
+ # If you are not using the original CrowdPose dataset for training,
+ # please make sure to remove the `rescore_cfg` item
+ rescore_cfg=dict(
+ in_channels=59,
+ norm_indexes=(0, 1),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/kpt_rescore_crowdpose-300c7efe.pth')),
+ ),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ nms_dist_thr=0.05,
+ shift_heatmap=True,
+ align_corners=False))
+
+# enable DDP training when rescore net is used
+find_unused_parameters = True
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'bottomup'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=32,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=10,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ nms_mode='none',
+ score_mode='keypoint',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640.py b/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..7d88ee5d20a15686dbeb61dd477509e2d07f243b
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640.py
@@ -0,0 +1,191 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=300, val_interval=20)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=300,
+ milestones=[200, 260],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=40)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='SPR',
+ input_size=(640, 640),
+ heatmap_size=(160, 160),
+ sigma=(4, 2),
+ minimal_diagonal_length=32**0.5,
+ generate_keypoint_heatmaps=True,
+ decode_max_instances=30)
+
+# model settings
+model = dict(
+ type='BottomupPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384),
+ multiscale_output=True)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='DEKRHead',
+ in_channels=720,
+ num_keypoints=14,
+ num_heatmap_filters=48,
+ heatmap_loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ displacement_loss=dict(
+ type='SoftWeightSmoothL1Loss',
+ use_target_weight=True,
+ supervise_empty=False,
+ beta=1 / 9,
+ loss_weight=0.004,
+ ),
+ decoder=codec,
+ # This rescore net is adapted from the official repo.
+ # If you are not using the original CrowdPose dataset for training,
+ # please make sure to remove the `rescore_cfg` item
+ rescore_cfg=dict(
+ in_channels=59,
+ norm_indexes=(0, 1),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/kpt_rescore_crowdpose-300c7efe.pth')),
+ ),
+ test_cfg=dict(
+ multiscale_test=False,
+ flip_test=True,
+ nms_dist_thr=0.05,
+ shift_heatmap=True,
+ align_corners=False))
+
+# enable DDP training when rescore net is used
+find_unused_parameters = True
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'bottomup'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='BottomupRandomAffine', input_size=codec['input_size']),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize',
+ input_size=codec['input_size'],
+ size_factor=32,
+ resize_mode='expand'),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=5,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ nms_mode='none',
+ score_mode='keypoint',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.md b/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..0bbedbe696bb00e79eb3c73956d83a3747d763d8
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.md
@@ -0,0 +1,56 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+DEKR (CVPR'2021)
+ +```bibtex +@inproceedings{geng2021bottom, + title={Bottom-up human pose estimation via disentangled keypoint regression}, + author={Geng, Zigang and Sun, Ke and Xiao, Bin and Zhang, Zhaoxiang and Wang, Jingdong}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={14676--14686}, + year={2021} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on CrowdPose test without multi-scale test
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [HRNet-w32](/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512.py) | 512x512 | 0.663 | 0.857 | 0.714 | 0.740 | 0.671 | 0.576 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512_147bae97-20221228.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512_20221228.json) |
+| [HRNet-w48](/configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640.py) | 640x640 | 0.679 | 0.869 | 0.731 | 0.753 | 0.688 | 0.593 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640_4ea6031e-20230128.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640_20230128.json) |
diff --git a/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.yml b/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..5bbb7f4b256a227493d988f4efa468d4a1f8e699
--- /dev/null
+++ b/configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.yml
@@ -0,0 +1,37 @@
+Models:
+- Config: configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512.py
+ In Collection: DEKR
+ Metadata:
+ Architecture: &id001
+ - DEKR
+ - HRNet
+ Training Data: CrowdPose
+ Name: dekr_hrnet-w32_8xb10-300e_crowdpose-512x512
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.663
+ AP@0.5: 0.857
+ AP@0.75: 0.714
+ AP (E): 0.74
+ AP (M): 0.671
+ AP (L): 0.576
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w32_8xb10-300e_crowdpose-512x512_147bae97-20221228.pth
+- Config: configs/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640.py
+ In Collection: DEKR
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: dekr_hrnet-w48_8xb5-300e_crowdpose-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.679
+ AP@0.5: 0.869
+ AP@0.75: 0.731
+ AP (E): 0.753
+ AP (M): 0.688
+ AP (L): 0.593
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/crowdpose/dekr_hrnet-w48_8xb5-300e_crowdpose-640x640_4ea6031e-20230128.pth
diff --git a/configs/body_2d_keypoint/edpose/coco/edpose_coco.md b/configs/body_2d_keypoint/edpose/coco/edpose_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..4016bc87e0c38bdb3ac2b36bef1fa08e78ab5aea
--- /dev/null
+++ b/configs/body_2d_keypoint/edpose/coco/edpose_coco.md
@@ -0,0 +1,62 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+ED-Pose (ICLR'2023)
+ +```bibtex +@inproceedings{ +yang2023explicit, +title={Explicit Box Detection Unifies End-to-End Multi-Person Pose Estimation}, +author={Jie Yang and Ailing Zeng and Shilong Liu and Feng Li and Ruimao Zhang and Lei Zhang}, +booktitle={International Conference on Learning Representations}, +year={2023}, +url={https://openreview.net/forum?id=s4WVupnJjmX} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017.
+
+| Arch | BackBone | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :-------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :--------------------------------------------: | :-------------------------------------------: |
+| [edpose_res50_coco](/configs/body_2d_keypoint/edpose/coco/edpose_res50_8xb2-50e_coco-800x1333.py) | ResNet-50 | 0.716 | 0.897 | 0.783 | 0.793 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/edpose/coco/edpose_res50_coco_3rdparty.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/edpose/coco/edpose_res50_coco_3rdparty.json) |
+
+The checkpoint is converted from the official repo. The training of EDPose is not supported yet. It will be supported in the future updates.
+
+The above config follows [Pure Python style](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/config.html#a-pure-python-style-configuration-file-beta). Please install `mmengine>=0.8.2` to use this config.
diff --git a/configs/body_2d_keypoint/edpose/coco/edpose_coco.yml b/configs/body_2d_keypoint/edpose/coco/edpose_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..4d00ee4114fc0820051c20b9f94571f0b1313efa
--- /dev/null
+++ b/configs/body_2d_keypoint/edpose/coco/edpose_coco.yml
@@ -0,0 +1,26 @@
+Collections:
+- Name: ED-Pose
+ Paper:
+ Title: Explicit Box Detection Unifies End-to-End Multi-Person Pose Estimation
+ URL: https://arxiv.org/pdf/2302.01593.pdf
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/edpose.md
+Models:
+- Config: configs/body_2d_keypoint/edpose/coco/edpose_res50_8xb2-50e_coco-800x1333.py
+ In Collection: ED-Pose
+ Alias: edpose
+ Metadata:
+ Architecture: &id001
+ - ED-Pose
+ - ResNet
+ Training Data: COCO
+ Name: edpose_res50_8xb2-50e_coco-800x1333
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.716
+ AP@0.5: 0.897
+ AP@0.75: 0.783
+ AR: 0.793
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/edpose/coco/edpose_res50_coco_3rdparty.pth
diff --git a/configs/body_2d_keypoint/edpose/coco/edpose_res50_8xb2-50e_coco-800x1333.py b/configs/body_2d_keypoint/edpose/coco/edpose_res50_8xb2-50e_coco-800x1333.py
new file mode 100644
index 0000000000000000000000000000000000000000..a1592538db4d876c2842fbdb359719a37f9edfe6
--- /dev/null
+++ b/configs/body_2d_keypoint/edpose/coco/edpose_res50_8xb2-50e_coco-800x1333.py
@@ -0,0 +1,236 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+from mmengine.config import read_base
+
+with read_base():
+ from mmpose.configs._base_.default_runtime import * # noqa
+
+from mmcv.transforms import RandomChoice, RandomChoiceResize
+from mmengine.dataset import DefaultSampler
+from mmengine.model import PretrainedInit
+from mmengine.optim import LinearLR, MultiStepLR
+from torch.nn import GroupNorm
+from torch.optim import Adam
+
+from mmpose.codecs import EDPoseLabel
+from mmpose.datasets import (BottomupRandomChoiceResize, BottomupRandomCrop,
+ CocoDataset, LoadImage, PackPoseInputs,
+ RandomFlip)
+from mmpose.evaluation import CocoMetric
+from mmpose.models import (BottomupPoseEstimator, ChannelMapper, EDPoseHead,
+ PoseDataPreprocessor, ResNet)
+from mmpose.models.utils import FrozenBatchNorm2d
+
+# runtime
+train_cfg.update(max_epochs=50, val_interval=10) # noqa
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type=Adam,
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(type=LinearLR, begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type=MultiStepLR,
+ begin=0,
+ end=140,
+ milestones=[33, 45],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=80)
+
+# hooks
+default_hooks.update( # noqa
+ checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(type=EDPoseLabel, num_select=50, num_keypoints=17)
+
+# model settings
+model = dict(
+ type=BottomupPoseEstimator,
+ data_preprocessor=dict(
+ type=PoseDataPreprocessor,
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type=ResNet,
+ depth=50,
+ num_stages=4,
+ out_indices=(1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type=FrozenBatchNorm2d, requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type=PretrainedInit, checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type=ChannelMapper,
+ in_channels=[512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type=GroupNorm, num_groups=32),
+ num_outs=4),
+ head=dict(
+ type=EDPoseHead,
+ num_queries=900,
+ num_feature_levels=4,
+ num_keypoints=17,
+ as_two_stage=True,
+ encoder=dict(
+ num_layers=6,
+ layer_cfg=dict( # DeformableDetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ num_heads=8,
+ num_levels=4,
+ num_points=4,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.0))),
+ decoder=dict(
+ num_layers=6,
+ embed_dims=256,
+ layer_cfg=dict( # DeformableDetrTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.1)),
+ query_dim=4,
+ num_feature_levels=4,
+ num_group=100,
+ num_dn=100,
+ num_box_decoder_layers=2,
+ return_intermediate=True),
+ out_head=dict(num_classes=2),
+ positional_encoding=dict(
+ num_pos_feats=128,
+ temperatureH=20,
+ temperatureW=20,
+ normalize=True),
+ denosing_cfg=dict(
+ dn_box_noise_scale=0.4,
+ dn_label_noise_ratio=0.5,
+ dn_labelbook_size=100,
+ dn_attn_mask_type_list=['match2dn', 'dn2dn', 'group2group']),
+ data_decoder=codec),
+ test_cfg=dict(Pmultiscale_test=False, flip_test=False, num_select=50),
+ train_cfg=dict())
+
+# enable DDP training when rescore net is used
+find_unused_parameters = True
+
+# base dataset settings
+dataset_type = CocoDataset
+data_mode = 'bottomup'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type=LoadImage),
+ dict(type=RandomFlip, direction='horizontal'),
+ dict(
+ type=RandomChoice,
+ transforms=[
+ [
+ dict(
+ type=RandomChoiceResize,
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type=BottomupRandomChoiceResize,
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type=BottomupRandomCrop,
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type=BottomupRandomChoiceResize,
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(type=PackPoseInputs),
+]
+
+val_pipeline = [
+ dict(type=LoadImage),
+ dict(
+ type=BottomupRandomChoiceResize,
+ scales=[(800, 1333)],
+ keep_ratio=True,
+ backend='pillow'),
+ dict(
+ type=PackPoseInputs,
+ meta_keys=('id', 'img_id', 'img_path', 'crowd_index', 'ori_shape',
+ 'img_shape', 'input_size', 'input_center', 'input_scale',
+ 'flip', 'flip_direction', 'flip_indices', 'raw_ann_info',
+ 'skeleton_links'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=1,
+ num_workers=1,
+ persistent_workers=True,
+ sampler=dict(type=DefaultSampler, shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=8,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type=DefaultSampler, shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type=CocoMetric,
+ nms_mode='none',
+ score_mode='keypoint',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/integral_regression/README.md b/configs/body_2d_keypoint/integral_regression/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..d60eaa1a575686006139a8584851e994b7b29e60
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/README.md
@@ -0,0 +1,15 @@
+# Top-down integral-regression-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. At the 2nd stage, integral regression based methods use a simple integral operation relates and unifies the heatmap and joint regression differentiably, thus obtain the keypoint coordinates given the features extracted from the bounding box area, following the paradigm introduced in [Integral Human Pose Regression](https://arxiv.org/abs/1711.08229).
+
+## Results and Models
+
+### COCO Dataset
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :------------------: | :--------: | :---: | :---: | :---------------------------------------------------: |
+| ResNet-50+Debias-IPR | 256x256 | 0.675 | 0.765 | [resnet_debias_coco.md](./coco/resnet_debias_coco.md) |
+| ResNet-50+DSNT | 256x256 | 0.674 | 0.764 | [resnet_dsnt_coco.md](./coco/resnet_dsnt_coco.md) |
+| ResNet-50+IPR | 256x256 | 0.633 | 0.730 | [resnet_ipr_coco.md](./coco/resnet_ipr_coco.md) |
diff --git a/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256.py b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..3dfaeeda8b850fa361eebbf5342ec64842d858e8
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256.py
@@ -0,0 +1,134 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='IntegralRegressionLabel',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2.0,
+ normalize=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ ),
+ head=dict(
+ type='DSNTHead',
+ in_channels=2048,
+ in_featuremap_size=(8, 8),
+ num_joints=17,
+ loss=dict(
+ type='MultipleLossWrapper',
+ losses=[
+ dict(type='SmoothL1Loss', use_target_weight=True),
+ dict(type='KeypointMSELoss', use_target_weight=True)
+ ]),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ shift_heatmap=True,
+ ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/td-hm_res50_8xb64-210e_coco-256x192.pth'))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256.py b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..9618c810ea20b0d147f71930034b616f6bed3a97
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256.py
@@ -0,0 +1,136 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='IntegralRegressionLabel',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2.0,
+ normalize=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ ),
+ head=dict(
+ type='DSNTHead',
+ in_channels=2048,
+ in_featuremap_size=(8, 8),
+ num_joints=17,
+ debias=True,
+ beta=10.,
+ loss=dict(
+ type='MultipleLossWrapper',
+ losses=[
+ dict(type='SmoothL1Loss', use_target_weight=True),
+ dict(type='JSDiscretLoss', use_target_weight=True)
+ ]),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ shift_heatmap=True,
+ ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/td-hm_res50_8xb64-210e_coco-256x192.pth'))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256.py b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..8c3897fce1acd0deabaedacea3b38b08b9138330
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256.py
@@ -0,0 +1,134 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='IntegralRegressionLabel',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2.0,
+ normalize=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ ),
+ head=dict(
+ type='DSNTHead',
+ in_channels=2048,
+ in_featuremap_size=(8, 8),
+ num_joints=17,
+ loss=dict(
+ type='MultipleLossWrapper',
+ losses=[
+ dict(type='SmoothL1Loss', use_target_weight=True),
+ dict(type='JSDiscretLoss', use_target_weight=True)
+ ]),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ shift_heatmap=True,
+ ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/td-hm_res50_8xb64-210e_coco-256x192.pth'))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.md b/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..40e3660e4f24f0d67d680d0f0ddc6c9f6c6c1014
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.md
@@ -0,0 +1,57 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+Debias IPR (ICCV'2021)
+ +```bibtex +@inproceedings{gu2021removing, + title={Removing the Bias of Integral Pose Regression}, + author={Gu, Kerui and Yang, Linlin and Yao, Angela}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11067--11076}, + year={2021} + } +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [debias-ipr_resnet_50](/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256.py) | 256x256 | 0.675 | 0.872 | 0.740 | 0.765 | 0.928 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256-055a7699_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256-055a7699_20220913.log.json) |
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.yml b/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b965238a5d482ec7212f8f95d0e4abadfe6773ce
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.yml
@@ -0,0 +1,25 @@
+Collections:
+- Name: DebiasIPR
+ Paper:
+ Title: Removing the Bias of Integral Pose Regression
+ URL: https://openaccess.thecvf.com/content/ICCV2021/papers/Gu_Removing_the_Bias_of_Integral_Pose_Regression_ICCV_2021_paper.pdf
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/debias_ipr.md
+Models:
+- Config: configs/body_2d_keypoint/integral_regression/coco/ipr_res50_debias--8xb64-210e_coco-256x256.py
+ In Collection: DebiasIPR
+ Metadata:
+ Architecture: &id001
+ - Debias
+ - ResNet
+ Training Data: COCO
+ Name: ipr_res50_debias--8xb64-210e_coco-256x256
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.675
+ AP@0.5: 0.872
+ AP@0.75: 0.74
+ AR: 0.765
+ AR@0.5: 0.928
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_debias-8xb64-210e_coco-256x256-055a7699_20220913.pth
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.md b/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..608974ae82e6f05913c98c35fb8fff3e5220b83a
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.md
@@ -0,0 +1,56 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+DSNT (2018)
+ +```bibtex +@article{nibali2018numerical, + title={Numerical Coordinate Regression with Convolutional Neural Networks}, + author={Nibali, Aiden and He, Zhen and Morgan, Stuart and Prendergast, Luke}, + journal={arXiv preprint arXiv:1801.07372}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ipr_resnet_50_dsnt](/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256.py) | 256x256 | 0.674 | 0.870 | 0.744 | 0.764 | 0.928 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256-441eedc0_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256-441eedc0_20220913.log.json) |
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.yml b/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f34e839c105c514b63f1b434207d56cfa1d57726
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.yml
@@ -0,0 +1,25 @@
+Collections:
+- Name: DSNT
+ Paper:
+ Title: Numerical Coordinate Regression with Convolutional Neural Networks
+ URL: https://arxiv.org/abs/1801.07372v2
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/dsnt.md
+Models:
+- Config: configs/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256.py
+ In Collection: DSNT
+ Metadata:
+ Architecture: &id001
+ - DSNT
+ - ResNet
+ Training Data: COCO
+ Name: ipr_res50_dsnt-8xb64-210e_coco-256x256
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.674
+ AP@0.5: 0.87
+ AP@0.75: 0.744
+ AR: 0.764
+ AR@0.5: 0.928
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_dsnt-8xb64-210e_coco-256x256-441eedc0_20220913.pth
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.md b/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..ce4fbae5011b451b4fd639ac896de1b150b2592a
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.md
@@ -0,0 +1,57 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+IPR (ECCV'2018)
+ +```bibtex +@inproceedings{sun2018integral, + title={Integral human pose regression}, + author={Sun, Xiao and Xiao, Bin and Wei, Fangyin and Liang, Shuang and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={529--545}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ipr_resnet_50](/configs/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256.py) | 256x256 | 0.633 | 0.860 | 0.703 | 0.730 | 0.919 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256-a3898a33_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256-a3898a33_20220913.log.json) |
diff --git a/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.yml b/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fa22133f3eb3fd4020f4c17ead813fc1908b23cb
--- /dev/null
+++ b/configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.yml
@@ -0,0 +1,25 @@
+Collections:
+- Name: IPR
+ Paper:
+ Title: Integral human pose regression
+ URL: https://arxiv.org/abs/1711.08229
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/ipr.md
+Models:
+- Config: configs/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256.py
+ In Collection: IPR
+ Metadata:
+ Architecture: &id001
+ - IPR
+ - ResNet
+ Training Data: COCO
+ Name: ipr_res50_8xb64-210e_coco-256x256
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.633
+ AP@0.5: 0.86
+ AP@0.75: 0.703
+ AR: 0.73
+ AR@0.5: 0.919
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/integral_regression/coco/ipr_res50_8xb64-210e_coco-256x256-a3898a33_20220913.pth
diff --git a/configs/body_2d_keypoint/rtmo/README.md b/configs/body_2d_keypoint/rtmo/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..7480e92ee77d0b129466bf07734f9895fbe17d38
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/README.md
@@ -0,0 +1,27 @@
+# RTMO: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+RTMO is a one-stage pose estimation model that seamlessly integrates coordinate classification into the YOLO architecture. It introduces a Dynamic Coordinate Classifier (DCC) module that handles keypoint localization through dual 1D heatmaps. The DCC employs dynamic bin allocation, localizing the coordinate bins to each predicted bounding box to improve efficiency. It also uses learnable bin representations based on positional encodings, enabling computation of bin-keypoint similarity for precise localization.
+
+RTMO is trained end-to-end using a multi-task loss, with losses for bounding box regression, keypoint heatmap classification via a novel MLE loss, keypoint coordinate proxy regression, and keypoint visibility classification. The MLE loss models annotation uncertainty and balances optimization between easy and hard samples.
+
+During inference, RTMO employs grid-based dense predictions to simultaneously output human detection boxes and poses in a single pass. It selectively decodes heatmaps only for high-scoring grids after NMS, minimizing computational cost.
+
+Compared to prior one-stage methods that regress keypoint coordinates directly, RTMO achieves higher accuracy through coordinate classification while retaining real-time speeds. It also outperforms lightweight top-down approaches for images with many people, as the latter have inference times that scale linearly with the number of human instances.
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py b/configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..45e4295c6ceedf42e72def61bed556f34eae34b2
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py
@@ -0,0 +1,533 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+# data settings
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[(i, i) for i in range(17)])
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+train_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file=metafile),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ sample_ratio_factor=[1, 0.3, 0.5, 0.3, 0.3, 0.4, 0.3],
+ test_mode=False,
+ pipeline=train_pipeline_stage1)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset)
+
+# val datasets
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_dataset=dataset_coco,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 1.0
+deepen_factor = 1.0
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco'
+ '_20211126_140236-d3bd2b23.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[256, 512, 1024],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=512,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=512,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=512,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-2,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py b/configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c1a0053668a31289b3a8a7cf73a546dbe1910d7
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py
@@ -0,0 +1,532 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+# data settings
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[(i, i) for i in range(17)])
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+train_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file=metafile),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ sample_ratio_factor=[1, 0.3, 0.5, 0.3, 0.3, 0.4, 0.3],
+ test_mode=False,
+ pipeline=train_pipeline_stage1)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset)
+
+# val datasets
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_dataset=dataset_coco,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.75
+deepen_factor = 0.67
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'pretrained_models/yolox_m_8x8_300e_coco_20230829.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[192, 384, 768],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=384,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=384,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=384,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-2,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py b/configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..83d7c21d8abf72a37a8457c44202307874d434c6
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py
@@ -0,0 +1,535 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+# data settings
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[(i, i) for i in range(17)])
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+train_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file=metafile),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ sample_ratio_factor=[1, 0.3, 0.5, 0.3, 0.3, 0.4, 0.3],
+ test_mode=False,
+ pipeline=train_pipeline_stage1)
+
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset)
+
+# val datasets
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_dataset=dataset_coco,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.5
+deepen_factor = 0.33
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_'
+ '20211121_095711-4592a793.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[128, 256, 512],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=256,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile),
+ use_keypoints_for_center=True),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=256,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1.0,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py b/configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py
new file mode 100644
index 0000000000000000000000000000000000000000..566fe34455dacd437d736d6d94f7fa2d627d8a34
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py
@@ -0,0 +1,529 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (416, 416)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(416, 416),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(416, 416),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(416, 416),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+# data settings
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[(i, i) for i in range(17)])
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+train_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file=metafile),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ sample_ratio_factor=[1, 0.3, 0.5, 0.3, 0.3, 0.4, 0.3],
+ test_mode=False,
+ pipeline=train_pipeline_stage1)
+
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset)
+
+# val datasets
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_dataset=dataset_coco,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.375
+deepen_factor = 0.33
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(320, 640),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_'
+ '20211124_171234-b4047906.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[96, 192, 384],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=192,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=192,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile),
+ use_keypoints_for_center=True),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=192,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1.0,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.md b/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.md
new file mode 100644
index 0000000000000000000000000000000000000000..e6174b2942c9d2f1833757193dae35e5c8b46dbf
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.md
@@ -0,0 +1,132 @@
+
+
+RTMO
+ +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+RTMO
+ +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+JHMDB (ICCV'2013)
+ +```bibtex +@inproceedings{Jhuang:ICCV:2013, + title = {Towards understanding action recognition}, + author = {H. Jhuang and J. Gall and S. Zuffi and C. Schmid and M. J. Black}, + booktitle = {International Conf. on Computer Vision (ICCV)}, + month = Dec, + pages = {3192-3199}, + year = {2013} +} +``` + +
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log | onnx |
+| :--------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :--------------------------------: | :-------------------------------: | :--------------------------------: |
+| [RTMO-t](/configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py) | 640x640 | 0.574 | 0.803 | 0.613 | 0.611 | 0.836 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-t_8xb32-600e_body7-416x416-f48f75cb_20231219.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-t_8xb32-600e_body7-416x416_20231219.json) | [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-t_8xb32-600e_body7-416x416-f48f75cb_20231219.zip) |
+| [RTMO-s](/configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py) | 640x640 | 0.686 | 0.879 | 0.744 | 0.723 | 0.908 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_body7-640x640-dac2bf74_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_body7-640x640_20231211.json) | [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-s_8xb32-600e_body7-640x640-dac2bf74_20231211.zip) |
+| [RTMO-m](/configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py) | 640x640 | 0.726 | 0.899 | 0.790 | 0.763 | 0.926 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_body7-640x640-39e78cc4_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_body7-640x640_20231211.json) | [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-m_16xb16-600e_body7-640x640-39e78cc4_20231211.zip) |
+| [RTMO-l](/configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py) | 640x640 | 0.748 | 0.911 | 0.813 | 0.786 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_body7-640x640-b37118ce_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_body7-640x640_20231211.json) | [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-l_16xb16-600e_body7-640x640-b37118ce_20231211.zip) |
diff --git a/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.yml b/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6f802531bba7d0561bebce100723e1779331d13c
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/body7/rtmo_body7.yml
@@ -0,0 +1,74 @@
+Models:
+- Config: configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: &id001
+ - RTMO
+ Training Data: &id002
+ - AI Challenger
+ - COCO
+ - CrowdPose
+ - MPII
+ - sub-JHMDB
+ - Halpe
+ - PoseTrack18
+ Name: rtmo-t_8xb32-600e_body7-416x416
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.574
+ AP@0.5: 0.803
+ AP@0.75: 0.613
+ AR: 0.611
+ AR@0.5: 0.836
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-t_8xb32-600e_body7-416x416-f48f75cb_20231219.pth
+- Config: configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmo-s_8xb32-600e_body7-640x640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.686
+ AP@0.5: 0.879
+ AP@0.75: 0.744
+ AR: 0.723
+ AR@0.5: 0.908
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_body7-640x640-dac2bf74_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmo-m_16xb16-600e_body7-640x640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.726
+ AP@0.5: 0.899
+ AP@0.75: 0.790
+ AR: 0.763
+ AR@0.5: 0.926
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_body7-640x640-39e78cc4_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py
+ In Collection: RTMO
+ Alias: rtmo
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmo-l_16xb16-600e_body7-640x640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.911
+ AP@0.75: 0.813
+ AR: 0.786
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_body7-640x640-b37118ce_20231211.pth
diff --git a/configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py b/configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..97bbd109ca3a9937cc57ad3afefe5ea9134ec265
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py
@@ -0,0 +1,321 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_coco)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 1.0
+deepen_factor = 1.0
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco'
+ '_20211126_140236-d3bd2b23.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[256, 512, 1024],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=512,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=512,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=512,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-2,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py b/configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..de669ba604469cf08d2c8d81457c896d4f321cc4
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py
@@ -0,0 +1,320 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_coco)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.75
+deepen_factor = 0.67
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'pretrained_models/yolox_m_8x8_300e_coco_20230829.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[192, 384, 768],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=384,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=384,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=384,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-2,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py b/configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..755c47bf82a021f2b75f303da9ea579ca28fd4b8
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py
@@ -0,0 +1,323 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=600, val_interval=20, dynamic_intervals=[(580, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=40, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=280, end=281),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=281,
+ T_max=300,
+ end=580,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=580, end=600),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/coco.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_coco)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 280: {
+ 'proxy_target_cc': True,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.5
+deepen_factor = 0.33
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_'
+ '20211121_095711-4592a793.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[128, 256, 512],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=17,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=256,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile),
+ use_keypoints_for_center=True),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=256,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1.0,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.md b/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..23aac68f0dfda5393ab7680fea4636dcb48e1426
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.md
@@ -0,0 +1,43 @@
+
+
+Halpe (CVPR'2020)
+ +```bibtex +@inproceedings{li2020pastanet, + title={PaStaNet: Toward Human Activity Knowledge Engine}, + author={Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu and Ma, Ze and Chen, Mingyang and Lu, Cewu}, + booktitle={CVPR}, + year={2020} +} +``` + +
+
+
+
+
+RTMO
+ +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO val2017
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [RTMO-s](/configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py) | 640x640 | 0.677 | 0.878 | 0.737 | 0.715 | 0.908 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_coco-640x640-8db55a59_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_coco-640x640_20231211.json) |
+| [RTMO-m](/configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py) | 640x640 | 0.709 | 0.890 | 0.778 | 0.747 | 0.920 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_coco-640x640-6f4e0306_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_coco-640x640_20231211.json) |
+| [RTMO-l](/configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py) | 640x640 | 0.724 | 0.899 | 0.788 | 0.762 | 0.927 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_coco-640x640-516a421f_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_coco-640x640_20231211.json) |
diff --git a/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.yml b/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c3fc84429f21658eb035048e023bf0b5e62ebfc0
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/coco/rtmo_coco.yml
@@ -0,0 +1,56 @@
+Collections:
+- Name: RTMO
+ Paper:
+ Title: 'RTMO: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation'
+ URL: https://arxiv.org/abs/2312.07526
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/rtmo.md
+Models:
+- Config: configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: &id001
+ - RTMO
+ Training Data: CrowdPose
+ Name: rtmo-s_8xb32-600e_coco-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.673
+ AP@0.5: 0.878
+ AP@0.75: 0.737
+ AR: 0.715
+ AR@0.5: 0.908
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_coco-640x640-8db55a59_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: rtmo-m_16xb16-600e_coco-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.709
+ AP@0.5: 0.890
+ AP@0.75: 0.778
+ AR: 0.747
+ AR@0.5: 0.920
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_coco-640x640-6f4e0306_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: rtmo-l_16xb16-600e_coco-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.724
+ AP@0.5: 0.899
+ AP@0.75: 0.788
+ AR: 0.762
+ AR@0.5: 0.927
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_coco-640x640-516a421f_20231211.pth
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..6ba9fbe04ce8dab52f50f690a7fdef1caa24e09d
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py
@@ -0,0 +1,502 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=700, val_interval=50, dynamic_intervals=[(670, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=50, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=350,
+ end=349,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=349, end=350),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=350,
+ T_max=320,
+ end=670,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=670, end=700),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/crowdpose.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+# data settings
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# mapping
+aic_crowdpose = [(3, 0), (0, 1), (4, 2), (1, 3), (5, 4), (2, 5),
+ (9, 6), (6, 7), (10, 8), (7, 9), (11, 10), (8, 11), (12, 12),
+ (13, 13)]
+
+coco_crowdpose = [
+ (5, 0),
+ (6, 1),
+ (7, 2),
+ (8, 3),
+ (9, 4),
+ (10, 5),
+ (11, 6),
+ (12, 7),
+ (13, 8),
+ (14, 9),
+ (15, 10),
+ (16, 11),
+]
+
+mpii_crowdpose = [
+ (13, 0),
+ (12, 1),
+ (14, 2),
+ (11, 3),
+ (15, 4),
+ (10, 5),
+ (3, 6),
+ (2, 7),
+ (4, 8),
+ (1, 9),
+ (5, 10),
+ (0, 11),
+ (9, 12),
+ (7, 13),
+]
+
+jhmdb_crowdpose = [(4, 0), (3, 1), (8, 2), (7, 3), (12, 4), (11, 5), (6, 6),
+ (5, 7), (10, 8), (9, 9), (14, 10), (13, 11), (2, 12),
+ (0, 13)]
+
+halpe_crowdpose = [
+ (5, 0),
+ (6, 1),
+ (7, 2),
+ (8, 3),
+ (9, 4),
+ (10, 5),
+ (11, 6),
+ (12, 7),
+ (13, 8),
+ (14, 9),
+ (15, 10),
+ (16, 11),
+]
+
+posetrack_crowdpose = [
+ (5, 0),
+ (6, 1),
+ (7, 2),
+ (8, 3),
+ (9, 4),
+ (10, 5),
+ (11, 6),
+ (12, 7),
+ (13, 8),
+ (14, 9),
+ (15, 10),
+ (16, 11),
+ (2, 12),
+ (1, 13),
+]
+
+# train datasets
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=14, mapping=coco_crowdpose)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=14, mapping=aic_crowdpose)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=14,
+ mapping=[(i, i) for i in range(14)])
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=14, mapping=mpii_crowdpose)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=14,
+ mapping=jhmdb_crowdpose)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=14,
+ mapping=halpe_crowdpose)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=14,
+ mapping=posetrack_crowdpose)
+ ],
+)
+
+train_dataset_stage1 = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file=metafile),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ sample_ratio_factor=[1, 0.3, 1, 0.3, 0.3, 0.4, 0.3],
+ test_mode=False,
+ pipeline=train_pipeline_stage1)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset_stage1)
+
+# val datasets
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ score_mode='bbox',
+ nms_mode='none',
+ iou_type='keypoints_crowd',
+ prefix='crowdpose',
+ use_area=False,
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=30,
+ new_train_dataset=dataset_crowdpose,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 350: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 1.0
+deepen_factor = 1.0
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco'
+ '_20211126_140236-d3bd2b23.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[256, 512, 1024],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=512,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=14,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=512,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=512,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-3,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b2c78b5a3032b2df8a5ca200788939517926dcb
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py
@@ -0,0 +1,326 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=700, val_interval=50, dynamic_intervals=[(670, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=50, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=350,
+ end=349,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=349, end=350),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=350,
+ T_max=320,
+ end=670,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=670, end=700),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/crowdpose.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.2,
+ rotate_factor=30,
+ scale_factor=(0.5, 1.5),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.6, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_crowdpose)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ score_mode='bbox',
+ nms_mode='none',
+ iou_type='keypoints_crowd',
+ prefix='crowdpose',
+ use_area=False,
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=30,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 350: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 1.0
+deepen_factor = 1.0
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco'
+ '_20211126_140236-d3bd2b23.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[256, 512, 1024],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=512,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=14,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=512,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=512,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-3,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..af8da87942c89a40117309db4fc4067235693eb9
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py
@@ -0,0 +1,325 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=700, val_interval=50, dynamic_intervals=[(670, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=50, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=350,
+ end=349,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=349, end=350),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=350,
+ T_max=320,
+ end=670,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=670, end=700),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/crowdpose.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.2,
+ rotate_factor=30,
+ scale_factor=(0.5, 1.5),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.6, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_crowdpose)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ score_mode='bbox',
+ nms_mode='none',
+ iou_type='keypoints_crowd',
+ prefix='crowdpose',
+ use_area=False,
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=30,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 350: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.75
+deepen_factor = 0.67
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'pretrained_models/yolox_m_8x8_300e_coco_20230829.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[192, 384, 768],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=384,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=14,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=384,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=384,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-3,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py
new file mode 100644
index 0000000000000000000000000000000000000000..288da890e88e77d34e923ed420bf5bb40ffdb3d5
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py
@@ -0,0 +1,326 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=700, val_interval=50, dynamic_intervals=[(670, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=50, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ constructor='ForceDefaultOptimWrapperConstructor',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ force_default_settings=True,
+ custom_keys=dict({'neck.encoder': dict(lr_mult=0.05)})),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=350,
+ end=349,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ # this scheduler is used to increase the lr from 2e-4 to 5e-4
+ dict(type='ConstantLR', by_epoch=True, factor=2.5, begin=349, end=350),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=350,
+ T_max=320,
+ end=670,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=670, end=700),
+]
+
+# data
+input_size = (640, 640)
+metafile = 'configs/_base_/datasets/crowdpose.py'
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.2,
+ rotate_factor=30,
+ scale_factor=(0.5, 1.5),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.6, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='BottomupGetHeatmapMask', get_invalid=True),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+# train datasets
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_crowdpose)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ score_mode='bbox',
+ nms_mode='none',
+ iou_type='keypoints_crowd',
+ prefix='crowdpose',
+ use_area=False,
+)
+test_evaluator = val_evaluator
+
+# hooks
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=30,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(
+ type='RTMOModeSwitchHook',
+ epoch_attributes={
+ 350: {
+ 'proxy_target_cc': True,
+ 'overlaps_power': 1.0,
+ 'loss_cls.loss_weight': 2.0,
+ 'loss_mle.loss_weight': 5.0,
+ 'loss_oks.loss_weight': 10.0
+ },
+ },
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
+
+# model
+widen_factor = 0.5
+deepen_factor = 0.33
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_'
+ '20211121_095711-4592a793.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='HybridEncoder',
+ in_channels=[128, 256, 512],
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ hidden_dim=256,
+ output_indices=[1, 2],
+ encoder_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ ffn_drop=0.0,
+ act_cfg=dict(type='GELU'))),
+ projector=dict(
+ type='ChannelMapper',
+ in_channels=[256, 256],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='BN'),
+ num_outs=2)),
+ head=dict(
+ type='RTMOHead',
+ num_keypoints=14,
+ featmap_strides=(16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ cls_feat_channels=256,
+ channels_per_group=36,
+ pose_vec_channels=256,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ assigner=dict(
+ type='SimOTAAssigner',
+ dynamic_k_indicator='oks',
+ oks_calculator=dict(type='PoseOKS', metainfo=metafile)),
+ prior_generator=dict(
+ type='MlvlPointGenerator',
+ centralize_points=True,
+ strides=[16, 32]),
+ dcc_cfg=dict(
+ in_channels=256,
+ feat_channels=128,
+ num_bins=(192, 256),
+ spe_channels=128,
+ gau_cfg=dict(
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ pos_enc='add')),
+ overlaps_power=0.5,
+ loss_cls=dict(
+ type='VariFocalLoss',
+ reduction='sum',
+ use_target_weight=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo=metafile,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_mle=dict(
+ type='MLECCLoss',
+ use_target_weight=True,
+ loss_weight=1e-3,
+ ),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ input_size=input_size,
+ score_thr=0.1,
+ nms_thr=0.65,
+ ))
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.md b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..314afb40f8f2177548472443008e1608487646fc
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.md
@@ -0,0 +1,44 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+RTMO
+ +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO val2017
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [RTMO-s](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py) | 640x640 | 0.673 | 0.882 | 0.729 | 0.737 | 0.682 | 0.591 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-700e_crowdpose-640x640-79f81c0d_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-700e_crowdpose-640x640_20231211.json) |
+| [RTMO-m](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py) | 640x640 | 0.711 | 0.897 | 0.771 | 0.774 | 0.719 | 0.634 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rrtmo-m_16xb16-700e_crowdpose-640x640-0eaf670d_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-700e_crowdpose-640x640_20231211.json) |
+| [RTMO-l](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py) | 640x640 | 0.732 | 0.907 | 0.793 | 0.792 | 0.741 | 0.653 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_crowdpose-640x640-1008211f_20231211.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_crowdpose-640x640_20231211.json) |
+| [RTMO-l](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py)\* | 640x640 | 0.838 | 0.947 | 0.893 | 0.888 | 0.847 | 0.772 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_body7-crowdpose-640x640-5bafdc11_20231219.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_body7-crowdpose-640x640_20231219.json) |
+
+\* indicates the model is trained using a combined dataset composed of AI Challenger, COCO, CrowdPose, Halpe, MPII, PoseTrack18 and sub-JHMDB.
diff --git a/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.yml b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d808f15e1250c8c2927f62d504a85f18e91c4c19
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.yml
@@ -0,0 +1,70 @@
+Models:
+- Config: configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: &id001
+ - RTMO
+ Training Data: CrowdPose
+ Name: rtmo-s_8xb32-700e_crowdpose-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.673
+ AP@0.5: 0.882
+ AP@0.75: 0.729
+ AP (E): 0.737
+ AP (M): 0.682
+ AP (L): 0.591
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-700e_crowdpose-640x640-79f81c0d_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: rtmo-m_16xb16-700e_crowdpose-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.711
+ AP@0.5: 0.897
+ AP@0.75: 0.771
+ AP (E): 0.774
+ AP (M): 0.719
+ AP (L): 0.634
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rrtmo-m_16xb16-700e_crowdpose-640x640-0eaf670d_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: rtmo-l_16xb16-700e_crowdpose-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.732
+ AP@0.5: 0.907
+ AP@0.75: 0.793
+ AP (E): 0.792
+ AP (M): 0.741
+ AP (L): 0.653
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_crowdpose-640x640-1008211f_20231211.pth
+- Config: configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py
+ In Collection: RTMO
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: rtmo-l_16xb16-700e_body7-crowdpose-640x640
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.838
+ AP@0.5: 0.947
+ AP@0.75: 0.893
+ AP (E): 0.888
+ AP (M): 0.847
+ AP (L): 0.772
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_body7-crowdpose-640x640-5bafdc11_20231219.pth
diff --git a/configs/body_2d_keypoint/rtmpose/README.md b/configs/body_2d_keypoint/rtmpose/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..38fd938376e533a5dcf1d02dce7491f97d308d53
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/README.md
@@ -0,0 +1,57 @@
+# RTMPose
+
+Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency.
+In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose.
+Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves **67.0% AP** on COCO-WholeBody with **130+ FPS**, outperforming existing open-source libraries.
+To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device.
+
+## Results and Models
+
+### COCO Dataset
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :----------------: | :--------: | :---: | :---: | :---------------------------------------: |
+| RTMPose-t | 256x192 | 0.682 | 0.736 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-s | 256x192 | 0.716 | 0.768 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-m | 256x192 | 0.746 | 0.795 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-l | 256x192 | 0.758 | 0.806 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-t-aic-coco | 256x192 | 0.685 | 0.738 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-s-aic-coco | 256x192 | 0.722 | 0.772 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-m-aic-coco | 256x192 | 0.758 | 0.806 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-l-aic-coco | 256x192 | 0.765 | 0.813 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-m-aic-coco | 384x288 | 0.770 | 0.816 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+| RTMPose-l-aic-coco | 384x288 | 0.773 | 0.819 | [rtmpose_coco.md](./coco/rtmpose_coco.md) |
+
+### MPII Dataset
+
+| Model | Input Size | PCKh@0.5 | PCKh@0.1 | Details and Download |
+| :-------: | :--------: | :------: | :------: | :---------------------------------------: |
+| RTMPose-m | 256x256 | 0.907 | 0.348 | [rtmpose_mpii.md](./mpii/rtmpose_mpii.md) |
+
+### CrowdPose Dataset
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------: | :--------: | :---: | :---: | :------------------------------------------------------: |
+| RTMPose-m | 256x192 | 0.706 | 0.788 | [rtmpose_crowdpose.md](./crowdpose/rtmpose_crowdpose.md) |
+
+### Human-Art Dataset
+
+Results on Human-Art validation dataset with detector having human AP of 56.2 on Human-Art validation dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------: | :--------: | :---: | :---: | :---------------------------------------------------: |
+| RTMPose-s | 256x192 | 0.311 | 0.381 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
+| RTMPose-m | 256x192 | 0.355 | 0.417 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
+| RTMPose-l | 256x192 | 0.378 | 0.442 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
+
+Results on Human-Art validation dataset with ground-truth bounding-box
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------: | :--------: | :---: | :---: | :---------------------------------------------------: |
+| RTMPose-s | 256x192 | 0.698 | 0.732 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
+| RTMPose-m | 256x192 | 0.728 | 0.759 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
+| RTMPose-l | 256x192 | 0.753 | 0.783 | [rtmpose_humanart.md](./humanart/rtmpose_humanart.md) |
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..1cf3380435bd1caee7e082954c268021073d7cd8
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-256x192.py
@@ -0,0 +1,553 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-l_udp-body7_210e-256x192-5e9558ef_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-384x288.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..19b3c8afb6f0d3b5d60bfe9f330c8ac8db15dc30
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-384x288.py
@@ -0,0 +1,553 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(288, 384),
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-l_udp-body7_210e-384x288-b15bc30d_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..293a5f07ea470e6bab484a7d0ce5693bd84db888
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py
@@ -0,0 +1,535 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (192, 256)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 512
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=5,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=5,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..0aa16f3db405fce481a3788029429dec50dfa732
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py
@@ -0,0 +1,535 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (288, 384)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 512
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..be462bfddf334e36d9361b8242c074f299d4f4b9
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py
@@ -0,0 +1,553 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-body7_210e-256x192-e0c9327b_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-384x288.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..64cfc8a604b37b8ed6de85c96e99d7295399b452
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-384x288.py
@@ -0,0 +1,553 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(288, 384),
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-body7_210e-384x288-b9bc2b57_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.0,
+ drop_path=0.0,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e694dd27d9e29f8615f62fc483dd976cf2644aaa
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py
@@ -0,0 +1,529 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (192, 256)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 512
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..5ee967a3097eb51e877a2e1c4a6e3a1330bdc20e
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py
@@ -0,0 +1,542 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (288, 384)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 512
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+# backend_args = dict(backend='local')
+backend_args = dict(
+ backend='petrel',
+ path_mapping=dict({
+ f'{data_root}': 's3://openmmlab/datasets/',
+ f'{data_root}': 's3://openmmlab/datasets/'
+ }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+# default_hooks = dict(
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..05e6ec09808ca47f337222dfac326a0ff45a8d50
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py
@@ -0,0 +1,535 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (192, 256)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 1024
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.0),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=512,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.6, 1.4],
+ rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb256-420e_body8-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb256-420e_body8-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7d0a69775106fb57df5d089dce7b5252c0e0f904
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb256-420e_body8-256x192.py
@@ -0,0 +1,553 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.0),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-s_udp-body7_210e-256x192-8c9ccbdb_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=512,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8d70bd27aeaf17ae36fb0c9daf24db91cc17ff5c
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py
@@ -0,0 +1,536 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (192, 256)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 1024
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=384,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.6, 1.4],
+ rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb256-420e_body8-256x192.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb256-420e_body8-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..bdc7f80a2bbbf71a958689c4fc45df3d15c22a4e
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb256-420e_body8-256x192.py
@@ -0,0 +1,554 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 20
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=384,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+aic_coco = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+]
+
+crowdpose_coco = [
+ (0, 5),
+ (1, 6),
+ (2, 7),
+ (3, 8),
+ (4, 9),
+ (5, 10),
+ (6, 11),
+ (7, 12),
+ (8, 13),
+ (9, 14),
+ (10, 15),
+ (11, 16),
+]
+
+mpii_coco = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_coco = [
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+ochuman_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+posetrack_coco = [
+ (0, 0),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=aic_coco)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=crowdpose_coco)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=mpii_coco)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=jhmdb_coco)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=halpe_coco)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(type='KeypointConverter', num_keypoints=17, mapping=ochuman_coco)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=17, mapping=posetrack_coco)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+test_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+# default_hooks = dict(
+# checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+
+test_evaluator = [
+ dict(type='PCKAccuracy', thr=0.1),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..e50aa42f0e5faafb2324e2d4f7d704f11a3c1cda
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py
@@ -0,0 +1,535 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 26
+input_size = (288, 384)
+
+# runtime
+max_epochs = 700
+stage2_num_epochs = 20
+base_lr = 4e-3
+train_batch_size = 256
+val_batch_size = 64
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.33,
+ widen_factor=1.25,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1280,
+ out_channels=num_keypoints,
+ input_size=input_size,
+ in_featuremap_size=tuple([s // 32 for s in input_size]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# mapping
+coco_halpe26 = [(i, i) for i in range(17)] + [(17, 20), (18, 22), (19, 24),
+ (20, 21), (21, 23), (22, 25)]
+
+aic_halpe26 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7),
+ (5, 9), (6, 12), (7, 14), (8, 16), (9, 11), (10, 13), (11, 15),
+ (12, 17), (13, 18)]
+
+crowdpose_halpe26 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11),
+ (7, 12), (8, 13), (9, 14), (10, 15), (11, 16), (12, 17),
+ (13, 18)]
+
+mpii_halpe26 = [
+ (0, 16),
+ (1, 14),
+ (2, 12),
+ (3, 11),
+ (4, 13),
+ (5, 15),
+ (8, 18),
+ (9, 17),
+ (10, 10),
+ (11, 8),
+ (12, 6),
+ (13, 5),
+ (14, 7),
+ (15, 9),
+]
+
+jhmdb_halpe26 = [
+ (0, 18),
+ (2, 17),
+ (3, 6),
+ (4, 5),
+ (5, 12),
+ (6, 11),
+ (7, 8),
+ (8, 7),
+ (9, 14),
+ (10, 13),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+]
+
+halpe_halpe26 = [(i, i) for i in range(26)]
+
+ochuman_halpe26 = [(i, i) for i in range(17)]
+
+posetrack_halpe26 = [
+ (0, 0),
+ (2, 17),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+dataset_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+dataset_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_train.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+dataset_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_train.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+dataset_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_train.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ dataset_coco,
+ dataset_aic,
+ dataset_crowdpose,
+ dataset_mpii,
+ dataset_jhmdb,
+ dataset_halpe,
+ dataset_posetrack,
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# val datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=coco_halpe26)
+ ],
+)
+
+val_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_val.json',
+ data_prefix=dict(
+ img='pose/ai_challenge/ai_challenger_keypoint'
+ '_validation_20170911/keypoint_validation_images_20170911/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=aic_halpe26)
+ ],
+)
+
+val_crowdpose = dict(
+ type='CrowdPoseDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=crowdpose_halpe26)
+ ],
+)
+
+val_mpii = dict(
+ type='MpiiDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='mpii/annotations/mpii_val.json',
+ data_prefix=dict(img='pose/MPI/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=mpii_halpe26)
+ ],
+)
+
+val_jhmdb = dict(
+ type='JhmdbDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='jhmdb/annotations/Sub1_test.json',
+ data_prefix=dict(img='pose/JHMDB/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=jhmdb_halpe26)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=halpe_halpe26)
+ ],
+)
+
+val_ochuman = dict(
+ type='OCHumanDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='ochuman/annotations/'
+ 'ochuman_coco_format_val_range_0.00_1.00.json',
+ data_prefix=dict(img='pose/OCHuman/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=ochuman_halpe26)
+ ],
+)
+
+val_posetrack = dict(
+ type='PoseTrack18Dataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='posetrack18/annotations/posetrack18_val.json',
+ data_prefix=dict(img='pose/PoseChallenge2018/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=num_keypoints,
+ mapping=posetrack_halpe26)
+ ],
+)
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/halpe26.py'),
+ datasets=[
+ val_coco,
+ val_aic,
+ val_crowdpose,
+ val_mpii,
+ val_jhmdb,
+ val_halpe,
+ val_ochuman,
+ val_posetrack,
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+test_evaluator = [dict(type='PCKAccuracy', thr=0.1), dict(type='AUC')]
+val_evaluator = test_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.md b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..5355a7f35be16d5e79a1336c234de54a036a5746
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.md
@@ -0,0 +1,76 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+- Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset.
+- `*` denotes model trained on 7 public datasets:
+ - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic)
+ - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco)
+ - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose)
+ - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii)
+ - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset)
+ - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe)
+ - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18)
+- `Body8` denotes the addition of the [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) dataset, in addition to the 7 datasets mentioned above, for evaluation.
+
+| Config | Input Size | APCOCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | EPE
(Body8) | Params(M) | FLOPS(G) | Download | +| :--------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :-----------------: | :-------: | :------: | :-----------------------------------------------: | +| [RTMPose-t\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb256-420e_body8-256x192.py) | 256x192 | 65.9 | 91.44 | 63.18 | 19.45 | 3.34 | 0.36 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth) | +| [RTMPose-s\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb256-420e_body8-256x192.py) | 256x192 | 69.7 | 92.45 | 65.15 | 17.85 | 5.47 | 0.68 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth) | +| [RTMPose-m\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py) | 256x192 | 74.9 | 94.25 | 68.59 | 15.12 | 13.59 | 1.93 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth) | +| [RTMPose-l\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-256x192.py) | 256x192 | 76.7 | 95.08 | 70.14 | 13.79 | 27.66 | 4.16 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth) | +| [RTMPose-m\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-384x288.py) | 384x288 | 76.6 | 94.64 | 70.38 | 13.98 | 13.72 | 4.33 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth) | +| [RTMPose-l\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-384x288.py) | 384x288 | 78.3 | 95.36 | 71.58 | 13.08 | 27.79 | 9.35 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth) | diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.yml b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.yml new file mode 100644 index 0000000000000000000000000000000000000000..bd8231ccbe1546bc5e69bbb43aa257ad55d834da --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.yml @@ -0,0 +1,98 @@ +Collections: +- Name: RTMPose + Paper: + Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose" + URL: https://arxiv.org/abs/2303.07399 + README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md +Models: +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb256-420e_body8-256x192.py + In Collection: RTMPose + Metadata: + Architecture: &id001 + - RTMPose + Training Data: &id002 + - AI Challenger + - COCO + - CrowdPose + - MPII + - sub-JHMDB + - Halpe + - PoseTrack18 + Name: rtmpose-t_8xb256-420e_body8-256x192 + Results: + - Dataset: Body8 + Metrics: + AP: 0.659 + Mean@0.1: 0.914 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb256-420e_body8-256x192.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-s_8xb256-420e_body8-256x192 + Results: + - Dataset: Body8 + Metrics: + AP: 0.697 + Mean@0.1: 0.925 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py + In Collection: RTMPose + Alias: + - human + - body + - body17 + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-m_8xb256-420e_body8-256x192 + Results: + - Dataset: Body8 + Metrics: + AP: 0.749 + Mean@0.1: 0.943 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-256x192.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-l_8xb256-420e_body8-256x192 + Results: + - Dataset: Body8 + Metrics: + AP: 0.767 + Mean@0.1: 0.951 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-384x288.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-m_8xb256-420e_body8-384x288 + Results: + - Dataset: Body8 + Metrics: + AP: 0.766 + Mean@0.1: 0.946 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb256-420e_body8-384x288.py + In Collection: RTMPose + Alias: rtmpose-l + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-l_8xb256-420e_body8-384x288 + Results: + - Dataset: Body8 + Metrics: + AP: 0.783 + Mean@0.1: 0.964 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.md b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.md new file mode 100644 index 0000000000000000000000000000000000000000..153b71c663c1a94336781ff89ba73499ffdc6e76 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.md @@ -0,0 +1,74 @@ + + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+- `*` denotes model trained on 7 public datasets:
+ - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic)
+ - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco)
+ - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose)
+ - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii)
+ - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset)
+ - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe)
+ - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18)
+- `Body8` denotes the addition of the [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) dataset, in addition to the 7 datasets mentioned above, for evaluation.
+
+| Config | Input Size | PCK@0.1AlphaPose (TPAMI'2022)
+ +```bibtex +@article{alphapose, + author = {Fang, Hao-Shu and Li, Jiefeng and Tang, Hongyang and Xu, Chao and Zhu, Haoyi and Xiu, Yuliang and Li, Yong-Lu and Lu, Cewu}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + title = {AlphaPose: Whole-Body Regional Multi-Person Pose Estimation and Tracking in Real-Time}, + year = {2022} +} +``` + +(Body8) | AUC
(Body8) | Params(M) | FLOPS(G) | Download | +| :--------------------------------------------------------------: | :--------: | :---------------------: | :-----------------: | :-------: | :------: | :-----------------------------------------------------------------: | +| [RTMPose-t\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 91.89 | 66.35 | 3.51 | 0.37 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.pth) | +| [RTMPose-s\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 93.01 | 68.62 | 5.70 | 0.70 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.pth) | +| [RTMPose-m\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 94.75 | 71.91 | 13.93 | 1.95 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth) | +| [RTMPose-l\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 95.37 | 73.19 | 28.11 | 4.19 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.pth) | +| [RTMPose-m\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.15 | 73.56 | 14.06 | 4.37 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.pth) | +| [RTMPose-l\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.56 | 74.38 | 28.24 | 9.40 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.pth) | +| [RTMPose-x\*](/configs/body_2d_keypoint/rtmpose/body8/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py) | 384x288 | 95.74 | 74.82 | 50.00 | 17.29 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.pth) | diff --git a/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.yml b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.yml new file mode 100644 index 0000000000000000000000000000000000000000..142918a5940dd57ca8c7aa16246aded54dadaf96 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.yml @@ -0,0 +1,107 @@ +Collections: +- Name: RTMPose + Paper: + Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose" + URL: https://arxiv.org/abs/2303.07399 + README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md +Models: +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py + In Collection: RTMPose + Metadata: + Architecture: &id001 + - RTMPose + Training Data: &id002 + - AI Challenger + - COCO + - CrowdPose + - MPII + - sub-JHMDB + - Halpe + - PoseTrack18 + Name: rtmpose-t_8xb1024-700e_body8-halpe26-256x192 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.919 + AUC: 0.664 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-s_8xb1024-700e_body8-halpe26-256x192 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.930 + AUC: 0.682 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py + In Collection: RTMPose + Alias: body26 + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-m_8xb512-700e_body8-halpe26-256x192 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.947 + AUC: 0.719 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-l_8xb512-700e_body8-halpe26-256x192 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.954 + AUC: 0.732 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-m_8xb512-700e_body8-halpe26-384x288 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.952 + AUC: 0.736 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-l_8xb512-700e_body8-halpe26-384x288 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.956 + AUC: 0.744 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.pth +- Config: configs/body_2d_keypoint/rtmpose/body8/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-x_8xb256-700e_body8-halpe26-384x288 + Results: + - Dataset: Body8 + Metrics: + Mean@0.1: 0.957 + AUC: 0.748 + Task: Body 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.pth diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..662bd72924b4e77c3f559c62475b0363d1472d0e --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-256x192.py @@ -0,0 +1,272 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=1024, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-384x288.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..7b5895962bc23a3b3c2d6bfcd30466cbcb5a8f92 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-384x288.py @@ -0,0 +1,272 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(288, 384), + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=1024, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..7d77b88fde213475b43e2f6132611eada135d8b9 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py @@ -0,0 +1,232 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=1024, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + # bbox_file=f'{data_root}person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..c7840f6c46c636bd340488c5f4059b804d02783e --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py @@ -0,0 +1,272 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=128 * 2, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-384x288.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..1293a1ae1c40d94b65df4c27097e4b5d506a2b1b --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-384x288.py @@ -0,0 +1,272 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(288, 384), + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=128 * 2, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..f21d0e18c624d6e13f16fc394abd8a7ccd23e167 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py @@ -0,0 +1,232 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + # bbox_file=f'{data_root}person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_aic-coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_aic-coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..6c9e9fdc55453eb93ab45ea6f8adfc18b333afc6 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_aic-coco-256x192.py @@ -0,0 +1,272 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.0), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.33, + widen_factor=0.5, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=512, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=128 * 2, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..c0abcbb1dd880a6a74afc5cc2d47fed0bc3b72da --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py @@ -0,0 +1,232 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.33, + widen_factor=0.5, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=512, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + # bbox_file=f'{data_root}person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_aic-coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_aic-coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..215a297944dce6d4d651aa3ac9d43b2878dd40b1 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_aic-coco-256x192.py @@ -0,0 +1,273 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.167, + widen_factor=0.375, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=384, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# train datasets +dataset_coco = dict( + type='RepeatDataset', + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + # Turn off EMA while training the tiny model + # dict( + # type='EMAHook', + # ema_type='ExpMomentumEMA', + # momentum=0.0002, + # update_buffers=True, + # priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..cbe0978b2b66127c7ec31886b21117fa4de89048 --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py @@ -0,0 +1,233 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.167, + widen_factor=0.375, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=384, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + # bbox_file=f'{data_root}person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + # Turn off EMA while training the tiny model + # dict( + # type='EMAHook', + # ema_type='ExpMomentumEMA', + # momentum=0.0002, + # update_buffers=True, + # priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.md b/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.md new file mode 100644 index 0000000000000000000000000000000000000000..d3cc9298df5e723f77cf26a4184c2efc7ca4469b --- /dev/null +++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.md @@ -0,0 +1,71 @@ + + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-t](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 0.682 | 0.883 | 0.759 | 0.736 | 0.920 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.json) |
+| [rtmpose-s](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 0.716 | 0.892 | 0.789 | 0.768 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.json) |
+| [rtmpose-m](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 0.746 | 0.899 | 0.817 | 0.795 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.json) |
+| [rtmpose-l](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 0.758 | 0.906 | 0.826 | 0.806 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.json) |
+| [rtmpose-t-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_aic-coco-256x192.py) | 256x192 | 0.685 | 0.880 | 0.761 | 0.738 | 0.918 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.json) |
+| [rtmpose-s-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_aic-coco-256x192.py) | 256x192 | 0.722 | 0.892 | 0.794 | 0.772 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.json) |
+| [rtmpose-m-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py) | 256x192 | 0.758 | 0.903 | 0.826 | 0.806 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.json) |
+| [rtmpose-l-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-256x192.py) | 256x192 | 0.765 | 0.906 | 0.835 | 0.813 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.json) |
+| [rtmpose-m-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-384x288.py) | 384x288 | 0.770 | 0.908 | 0.833 | 0.816 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.json) |
+| [rtmpose-l-aic-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-384x288.py) | 384x288 | 0.773 | 0.907 | 0.835 | 0.819 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.json) |
diff --git a/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.yml b/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..adb734073a6cdc5d47e54c8391631ad35d944ecd
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.yml
@@ -0,0 +1,170 @@
+Collections:
+- Name: RTMPose
+ Paper:
+ Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose"
+ URL: https://arxiv.org/abs/2303.07399
+ README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md
+Models:
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: &id001
+ - RTMPose
+ Training Data: COCO
+ Name: rtmpose-t_8xb256-420e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.682
+ AP@0.5: 0.883
+ AP@0.75: 0.759
+ AR: 0.736
+ AR@0.5: 0.92
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: rtmpose-s_8xb256-420e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.716
+ AP@0.5: 0.892
+ AP@0.75: 0.789
+ AR: 0.768
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: rtmpose-m_8xb256-420e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.746
+ AP@0.5: 0.899
+ AP@0.75: 0.817
+ AR: 0.795
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: rtmpose-l_8xb256-420e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.758
+ AP@0.5: 0.906
+ AP@0.75: 0.826
+ AR: 0.806
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_aic-coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: &id002
+ - COCO
+ - AI Challenger
+ Name: rtmpose-t_8xb256-420e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.685
+ AP@0.5: 0.88
+ AP@0.75: 0.761
+ AR: 0.738
+ AR@0.5: 0.918
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_aic-coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-s_8xb256-420e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.722
+ AP@0.5: 0.892
+ AP@0.75: 0.794
+ AR: 0.772
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-m_8xb256-420e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.758
+ AP@0.5: 0.903
+ AP@0.75: 0.826
+ AR: 0.806
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-l_8xb256-420e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.765
+ AP@0.5: 0.906
+ AP@0.75: 0.835
+ AR: 0.813
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-384x288.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-m_8xb256-420e_aic-coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.770
+ AP@0.5: 0.908
+ AP@0.75: 0.833
+ AR: 0.816
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth
+- Config: configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_aic-coco-384x288.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-l_8xb256-420e_aic-coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.773
+ AP@0.5: 0.907
+ AP@0.75: 0.835
+ AR: 0.819
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth
diff --git a/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose-m_8xb64-210e_crowdpose-256x192.py b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose-m_8xb64-210e_crowdpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e93a2f1099cd4d298a1a745a03eb7ddffd3b8998
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose-m_8xb64-210e_crowdpose-256x192.py
@@ -0,0 +1,234 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 5e-4
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=14,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='crowdpose/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'crowdpose/annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.md b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..42bcf0f65f3b76b453d82e8e24bc040cd14bcb0b
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.md
@@ -0,0 +1,60 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-m](/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose-m_8xb64-210e_crowdpose-256x192.py) | 256x192 | 0.706 | 0.841 | 0.765 | 0.799 | 0.719 | 0.582 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-crowdpose_pt-aic-coco_210e-256x192-e6192cac_20230224.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-crowdpose_pt-aic-coco_210e-256x192-e6192cac_20230224.json) |
diff --git a/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.yml b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..5fb842f56355267e7b22509c76717c97223b2721
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose-m_8xb64-210e_crowdpose-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: CrowdPose
+ Name: rtmpose-t_8xb256-420e_coco-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.706
+ AP@0.5: 0.841
+ AP@0.75: 0.765
+ AP (E): 0.799
+ AP (M): 0.719
+ AP (L): 0.582
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-crowdpose_pt-aic-coco_210e-256x192-e6192cac_20230224.pth
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..384a712d95ffd5e5e6286cadfe53d6abd0f425fd
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ # bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ # 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..30178cbb6dd68d56dd95e934c54ebf96b04482d8
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ # bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ # 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b4263f25e741e25a0ec5b85900ff1b2587d2805d
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=512,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ # bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ # 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..869f04217d6caecfd422d387730cbfd28cc208c1
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py
@@ -0,0 +1,233 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 420
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=384,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ # bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ # 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ # Turn off EMA while training the tiny model
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.md b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.md
new file mode 100644
index 0000000000000000000000000000000000000000..385ce0612a77e697aead79d037d064617f1a911f
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.md
@@ -0,0 +1,117 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+Results on Human-Art validation dataset with detector having human AP of 56.2 on Human-Art validation dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-t-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 0.161 | 0.283 | 0.154 | 0.221 | 0.373 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.json) |
+| [rtmpose-t-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py) | 256x192 | 0.249 | 0.395 | 0.256 | 0.323 | 0.485 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.json) |
+| [rtmpose-s-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 0.199 | 0.328 | 0.198 | 0.261 | 0.418 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.json) |
+| [rtmpose-s-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py) | 256x192 | 0.311 | 0.462 | 0.323 | 0.381 | 0.540 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.json) |
+| [rtmpose-m-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 0.239 | 0.372 | 0.243 | 0.302 | 0.455 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.json) |
+| [rtmpose-m-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py) | 256x192 | 0.355 | 0.503 | 0.377 | 0.417 | 0.568 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.json) |
+| [rtmpose-l-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 0.260 | 0.393 | 0.267 | 0.323 | 0.472 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.json) |
+| [rtmpose-l-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py) | 256x192 | 0.378 | 0.521 | 0.399 | 0.442 | 0.584 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.json) |
+
+Results on Human-Art validation dataset with ground-truth bounding-box
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-t-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 0.444 | 0.725 | 0.453 | 0.488 | 0.750 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.json) |
+| [rtmpose-t-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py) | 256x192 | 0.655 | 0.872 | 0.720 | 0.693 | 0.890 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.json) |
+| [rtmpose-s-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 0.480 | 0.739 | 0.498 | 0.521 | 0.763 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.json) |
+| [rtmpose-s-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py) | 256x192 | 0.698 | 0.893 | 0.768 | 0.732 | 0.903 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.json) |
+| [rtmpose-m-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 0.532 | 0.765 | 0.563 | 0.571 | 0.789 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.json) |
+| [rtmpose-m-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py) | 256x192 | 0.728 | 0.895 | 0.791 | 0.759 | 0.906 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.json) |
+| [rtmpose-l-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 0.564 | 0.789 | 0.602 | 0.599 | 0.808 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.json) |
+| [rtmpose-l-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py) | 256x192 | 0.753 | 0.905 | 0.812 | 0.783 | 0.915 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.json) |
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-t-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 0.682 | 0.883 | 0.759 | 0.736 | 0.920 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-coco_pt-aic-coco_420e-256x192-e613ba3f_20230127.json) |
+| [rtmpose-t-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py) | 256x192 | 0.665 | 0.875 | 0.739 | 0.721 | 0.916 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.json) |
+| [rtmpose-s-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 0.716 | 0.892 | 0.789 | 0.768 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-coco_pt-aic-coco_420e-256x192-8edcf0d7_20230127.json) |
+| [rtmpose-s-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py) | 256x192 | 0.706 | 0.888 | 0.780 | 0.759 | 0.928 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.json) |
+| [rtmpose-m-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 0.746 | 0.899 | 0.817 | 0.795 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco_pt-aic-coco_420e-256x192-d8dd5ca4_20230127.json) |
+| [rtmpose-m-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py) | 256x192 | 0.725 | 0.892 | 0.795 | 0.775 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.json) |
+| [rtmpose-l-coco](/configs/body_2d_keypoint/rtmpose/coco/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 0.758 | 0.906 | 0.826 | 0.806 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco_pt-aic-coco_420e-256x192-1352a4d2_20230127.json) |
+| [rtmpose-l-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py) | 256x192 | 0.748 | 0.901 | 0.816 | 0.796 | 0.938 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.json) |
+
+Results on COCO val2017 with ground-truth bounding box
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rtmpose-t-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py) | 256x192 | 0.679 | 0.895 | 0.755 | 0.710 | 0.907 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.json) |
+| [rtmpose-s-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py) | 256x192 | 0.725 | 0.916 | 0.798 | 0.753 | 0.925 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.json) |
+| [rtmpose-m-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py) | 256x192 | 0.744 | 0.916 | 0.818 | 0.770 | 0.930 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.json) |
+| [rtmpose-l-humanart-coco](/configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py) | 256x192 | 0.770 | 0.927 | 0.840 | 0.794 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.json) |
diff --git a/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.yml b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2d6cf6ff26c41d4585cb498af0a1bc092f11c116
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.yml
@@ -0,0 +1,138 @@
+Collections:
+- Name: RTMPose
+ Paper:
+ Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose"
+ URL: https://arxiv.org/abs/2303.07399
+ README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md
+Models:
+- Config: configs/body_2d_keypoint/rtmpose/humanart/rtmpose-l_8xb256-420e_humanart-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: &id001
+ - RTMPose
+ Training Data: &id002
+ - COCO
+ - Human-Art
+ Name: rtmpose-l_8xb256-420e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.901
+ AP@0.75: 0.816
+ AR: 0.796
+ AR@0.5: 0.938
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.378
+ AP@0.5: 0.521
+ AP@0.75: 0.399
+ AR: 0.442
+ AR@0.5: 0.584
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.753
+ AP@0.5: 0.905
+ AP@0.75: 0.812
+ AR: 0.783
+ AR@0.5: 0.915
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth
+- Config: configs/body_2d_keypoint/rtmpose/humanart/rtmpose-m_8xb256-420e_humanart-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-m_8xb256-420e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.725
+ AP@0.5: 0.892
+ AP@0.75: 0.795
+ AR: 0.775
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.355
+ AP@0.5: 0.503
+ AP@0.75: 0.377
+ AR: 0.417
+ AR@0.5: 0.568
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.728
+ AP@0.5: 0.895
+ AP@0.75: 0.791
+ AR: 0.759
+ AR@0.5: 0.906
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth
+- Config: configs/body_2d_keypoint/rtmpose/humanart/rtmpose-s_8xb256-420e_humanart-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-s_8xb256-420e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.706
+ AP@0.5: 0.888
+ AP@0.75: 0.780
+ AR: 0.759
+ AR@0.5: 0.928
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.311
+ AP@0.5: 0.462
+ AP@0.75: 0.323
+ AR: 0.381
+ AR@0.5: 0.540
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.698
+ AP@0.5: 0.893
+ AP@0.75: 0.768
+ AR: 0.732
+ AR@0.5: 0.903
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth
+- Config: configs/body_2d_keypoint/rtmpose/humanart/rtmpose-t_8xb256-420e_humanart-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: rtmpose-t_8xb256-420e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.665
+ AP@0.5: 0.875
+ AP@0.75: 0.739
+ AR: 0.721
+ AR@0.5: 0.916
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.249
+ AP@0.5: 0.395
+ AP@0.75: 0.256
+ AR: 0.323
+ AR@0.5: 0.485
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.655
+ AP@0.5: 0.872
+ AP@0.75: 0.720
+ AR: 0.693
+ AR@0.5: 0.890
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth
diff --git a/configs/body_2d_keypoint/rtmpose/mpii/rtmpose-m_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose-m_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ca67020f510e739041a342e9aa15f68098dec189
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose-m_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,228 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=16,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/pose/MPI/',
+# f'{data_root}': 's3://openmmlab/datasets/pose/MPI/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.md b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..990edb45eb2b882e6ddfe14253562dce5a5adba9
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.md
@@ -0,0 +1,43 @@
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean / w. flip | Mean@0.1 | ckpt | log |
+| :------------------------------------------------------- | :--------: | :------------: | :------: | :------------------------------------------------------: | :------------------------------------------------------: |
+| [rtmpose-m](/configs/body_2d_keypoint/rtmpose/mpii/rtmpose-m_8xb64-210e_mpii-256x256.py) | 256x256 | 0.907 | 0.348 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-mpii_pt-aic-coco_210e-256x256-ec4dbec8_20230206.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-mpii_pt-aic-coco_210e-256x256-ec4dbec8_20230206.json) |
diff --git a/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.yml b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2e1eb28659f49681496cacdbd5bb4f2062e5358b
--- /dev/null
+++ b/configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/body_2d_keypoint/rtmpose/mpii/rtmpose-m_8xb64-210e_mpii-256x256.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: MPII
+ Name: rtmpose-m_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.907
+ Mean@0.1: 0.348
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-mpii_pt-aic-coco_210e-256x256-ec4dbec8_20230206.pth
diff --git a/configs/body_2d_keypoint/simcc/README.md b/configs/body_2d_keypoint/simcc/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..6148c18bf5061743de2eacf531554f567fa50516
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/README.md
@@ -0,0 +1,20 @@
+# Top-down SimCC-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. At the 2nd stage, SimCC based methods reformulate human pose estimation as two classification tasks for horizontal and vertical coordinates, and uniformly divide each pixel into several bins, thus obtain the keypoint coordinates given the features extracted from the bounding box area, following the paradigm introduced in [SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation](https://arxiv.org/abs/2107.03332).
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+ +
+
+
+## Results and Models
+
+### COCO Dataset
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :---------------------------: | :--------: | :---: | :---: | :-----------------------------------------------: |
+| ResNet-50+SimCC | 384x288 | 0.735 | 0.790 | [resnet_coco.md](./coco/resnet_coco.md) |
+| ResNet-50+SimCC | 256x192 | 0.721 | 0.781 | [resnet_coco.md](./coco/resnet_coco.md) |
+| S-ViPNAS-MobileNet-V3+SimCC | 256x192 | 0.695 | 0.755 | [vipnas_coco.md](./coco/vipnas_coco.md) |
+| MobileNet-V2+SimCC(wo/deconv) | 256x192 | 0.620 | 0.678 | [mobilenetv2_coco.md](./coco/mobilenetv2_coco.md) |
diff --git a/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.md b/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..42438774bade657bd5c927d08d99353acbcf7f82
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.md
@@ -0,0 +1,55 @@
+
+
+
+
+
+
+
+
+SimCC (ECCV'2022)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2107.03332, + title={SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation}, + author={Li, Yanjie and Yang, Sen and Liu, Peidong and Zhang, Shoukui and Wang, Yunxiao and Wang, Zhicheng and Yang, Wankou and Xia, Shu-Tao}, + year={2021} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [simcc_mobilenetv2_wo_deconv](/configs/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192.py) | 256x192 | 0.620 | 0.855 | 0.697 | 0.678 | 0.902 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192-4b0703bb_20221010.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192-4b0703bb_20221010.log.json) |
diff --git a/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.yml b/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..00ef5aaecd3bfde35036e309d7a438fd2d9ea219
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192.py
+ In Collection: SimCC
+ Metadata:
+ Architecture: &id001
+ - SimCC
+ - MobilenetV2
+ Training Data: COCO
+ Name: simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.62
+ AP@0.5: 0.855
+ AP@0.75: 0.697
+ AR: 0.678
+ AR@0.5: 0.902
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192-4b0703bb_20221010.pth
diff --git a/configs/body_2d_keypoint/simcc/coco/resnet_coco.md b/configs/body_2d_keypoint/simcc/coco/resnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..80592b4db38a306c297b952264dc0e0b51d64fde
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/resnet_coco.md
@@ -0,0 +1,56 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimCC (ECCV'2022)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2107.03332, + title={SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation}, + author={Li, Yanjie and Yang, Sen and Liu, Peidong and Zhang, Shoukui and Wang, Yunxiao and Wang, Zhicheng and Yang, Wankou and Xia, Shu-Tao}, + year={2021} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [simcc_resnet_50](/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192.py) | 256x192 | 0.721 | 0.897 | 0.798 | 0.781 | 0.937 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192-8e0f5b59_20220919.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192-8e0f5b59_20220919.log.json) |
+| [simcc_resnet_50](/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288.py) | 384x288 | 0.735 | 0.899 | 0.800 | 0.790 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288-45c3ba34_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288-45c3ba34_20220913.log.json) |
diff --git a/configs/body_2d_keypoint/simcc/coco/resnet_coco.yml b/configs/body_2d_keypoint/simcc/coco/resnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1e56c9e477f36576909633a4107f24db5872bbfe
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/resnet_coco.yml
@@ -0,0 +1,41 @@
+Collections:
+- Name: SimCC
+ Paper:
+ Title: A Simple Coordinate Classification Perspective for Human Pose Estimation
+ URL: https://arxiv.org/abs/2107.03332
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/simcc.md
+Models:
+- Config: configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192.py
+ In Collection: SimCC
+ Metadata:
+ Architecture: &id001
+ - SimCC
+ - ResNet
+ Training Data: COCO
+ Name: simcc_res50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.721
+ AP@0.5: 0.900
+ AP@0.75: 0.798
+ AR: 0.781
+ AR@0.5: 0.937
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192-8e0f5b59_20220919.pth
+- Config: configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288.py
+ In Collection: SimCC
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: simcc_res50_8xb32-140e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.735
+ AP@0.5: 0.899
+ AP@0.75: 0.800
+ AR: 0.790
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288-45c3ba34_20220913.pth
diff --git a/configs/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..800803d190265cbe8183143e7c7ed7b9ebabb21d
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/simcc_mobilenetv2_wo-deconv-8xb64-210e_coco-256x192.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel', input_size=(192, 256), sigma=6.0, simcc_split_ratio=2.0)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='mmcls://mobilenet_v2',
+ )),
+ head=dict(
+ type='SimCCHead',
+ in_channels=1280,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ deconv_out_channels=None,
+ loss=dict(type='KLDiscretLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288.py b/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..c04358299fe4189daf7ad19bbf76d18e8dd9305c
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb32-140e_coco-384x288.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=140, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[90, 120],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel', input_size=(288, 384), sigma=6.0, simcc_split_ratio=2.0)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='SimCCHead',
+ in_channels=2048,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ loss=dict(type='KLDiscretLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..33232a4463ef44872e97b4fba455e0f3e990f109
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/simcc_res50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,114 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(type='MultiStepLR', milestones=[170, 200], gamma=0.1, by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel', input_size=(192, 256), sigma=6.0, simcc_split_ratio=2.0)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='SimCCHead',
+ in_channels=2048,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ loss=dict(type='KLDiscretLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ba8ba040cb639b02f701cf36bb8ad03eeb5ffdec
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192.py
@@ -0,0 +1,119 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel', input_size=(192, 256), sigma=6.0, simcc_split_ratio=2.0)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ViPNAS_MobileNetV3'),
+ head=dict(
+ type='SimCCHead',
+ in_channels=160,
+ out_channels=17,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ deconv_type='vipnas',
+ deconv_out_channels=(160, 160, 160),
+ deconv_num_groups=(160, 160, 160),
+ loss=dict(type='KLDiscretLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=data_root + 'person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/simcc/coco/vipnas_coco.md b/configs/body_2d_keypoint/simcc/coco/vipnas_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..a9d8b98fc3a9dbae4128ac9ce3c09a24de0474eb
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/vipnas_coco.md
@@ -0,0 +1,54 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimCC (ECCV'2022)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2107.03332, + title={SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation}, + author={Li, Yanjie and Yang, Sen and Liu, Peidong and Zhang, Shoukui and Wang, Yunxiao and Wang, Zhicheng and Yang, Wankou and Xia, Shu-Tao}, + year={2021} +} +``` + +
+
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [simcc_S-ViPNAS-MobileNetV3](/configs/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192.py) | 256x192 | 0.695 | 0.883 | 0.772 | 0.755 | 0.927 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192-719f3489_20220922.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192-719f3489_20220922.log.json) |
diff --git a/configs/body_2d_keypoint/simcc/coco/vipnas_coco.yml b/configs/body_2d_keypoint/simcc/coco/vipnas_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..95077c05c658a42e767833d2102b2e0603288f72
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/coco/vipnas_coco.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192.py
+ In Collection: SimCC
+ Metadata:
+ Architecture: &id001
+ - SimCC
+ - ViPNAS
+ Training Data: COCO
+ Name: simcc_vipnas-mbv3_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.695
+ AP@0.5: 0.883
+ AP@0.75: 0.772
+ AR: 0.755
+ AR@0.5: 0.927
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/simcc/coco/simcc_vipnas-mbv3_8xb64-210e_coco-256x192-719f3489_20220922.pth
diff --git a/configs/body_2d_keypoint/simcc/mpii/simcc_res50_wo-deconv-8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/simcc/mpii/simcc_res50_wo-deconv-8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ef8b47959ea1b70003fe9906889ccec3ee452a51
--- /dev/null
+++ b/configs/body_2d_keypoint/simcc/mpii/simcc_res50_wo-deconv-8xb64-210e_mpii-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel', input_size=(256, 256), sigma=6.0, simcc_split_ratio=2.0)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='SimCCHead',
+ in_channels=2048,
+ out_channels=16,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ deconv_out_channels=None,
+ loss=dict(type='KLDiscretLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/README.md b/configs/body_2d_keypoint/topdown_heatmap/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..47aae219e463a9f53bf3ec51c83a4a2d5c63daf2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/README.md
@@ -0,0 +1,133 @@
+# Top-down heatmap-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html).
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+## Results and Models
+
+### COCO Dataset
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------------: | :--------: | :---: | :---: | :-------------------------------------------------: |
+| ViTPose-h | 256x192 | 0.790 | 0.840 | [vitpose_coco.md](./coco/vitpose_coco.md) |
+| HRNet-w48+UDP | 256x192 | 0.768 | 0.817 | [hrnet_udp_coco.md](./coco/hrnet_udp_coco.md) |
+| MSPN 4-stg | 256x192 | 0.765 | 0.826 | [mspn_coco.md](./coco/mspn_coco.md) |
+| HRNet-w48+Dark | 256x192 | 0.764 | 0.814 | [hrnet_dark_coco.md](./coco/hrnet_dark_coco.md) |
+| HRNet-w48 | 256x192 | 0.756 | 0.809 | [hrnet_coco.md](./coco/hrnet_coco.md) |
+| HRFormer-B | 256x192 | 0.754 | 0.807 | [hrformer_coco.md](./coco/hrformer_coco.md) |
+| RSN-50-3x | 256x192 | 0.750 | 0.814 | [rsn_coco.md](./coco/rsn_coco.md) |
+| CSPNeXt-l | 256x192 | 0.750 | 0.800 | [cspnext_udp_coco.md](./coco/cspnext_udp_coco.md) |
+| HRNet-w32 | 256x192 | 0.749 | 0.804 | [hrnet_coco.md](./coco/hrnet_coco.md) |
+| Swin-L | 256x192 | 0.743 | 0.798 | [swin_coco.md](./coco/swin_coco.md) |
+| ViTPose-s | 256x192 | 0.739 | 0.792 | [vitpose_coco.md](./coco/vitpose_coco.md) |
+| HRFormer-S | 256x192 | 0.738 | 0.793 | [hrformer_coco.md](./coco/hrformer_coco.md) |
+| Swin-B | 256x192 | 0.737 | 0.794 | [swin_coco.md](./coco/swin_coco.md) |
+| SEResNet-101 | 256x192 | 0.734 | 0.790 | [seresnet_coco.md](./coco/seresnet_coco.md) |
+| SCNet-101 | 256x192 | 0.733 | 0.789 | [scnet_coco.md](./coco/scnet_coco.md) |
+| ResNet-101+Dark | 256x192 | 0.733 | 0.786 | [resnet_dark_coco.md](./coco/resnet_dark_coco.md) |
+| CSPNeXt-m | 256x192 | 0.732 | 0.785 | [cspnext_udp_coco.md](./coco/cspnext_udp_coco.md) |
+| ResNetV1d-101 | 256x192 | 0.732 | 0.785 | [resnetv1d_coco.md](./coco/resnetv1d_coco.md) |
+| SEResNet-50 | 256x192 | 0.729 | 0.784 | [seresnet_coco.md](./coco/seresnet_coco.md) |
+| SCNet-50 | 256x192 | 0.728 | 0.784 | [scnet_coco.md](./coco/scnet_coco.md) |
+| ResNet-101 | 256x192 | 0.726 | 0.783 | [resnet_coco.md](./coco/resnet_coco.md) |
+| ResNeXt-101 | 256x192 | 0.726 | 0.781 | [resnext_coco.md](./coco/resnext_coco.md) |
+| HourglassNet | 256x256 | 0.726 | 0.780 | [hourglass_coco.md](./coco/hourglass_coco.md) |
+| ResNeSt-101 | 256x192 | 0.725 | 0.781 | [resnest_coco.md](./coco/resnest_coco.md) |
+| RSN-50 | 256x192 | 0.724 | 0.790 | [rsn_coco.md](./coco/rsn_coco.md) |
+| Swin-T | 256x192 | 0.724 | 0.782 | [swin_coco.md](./coco/swin_coco.md) |
+| MSPN 1-stg | 256x192 | 0.723 | 0.788 | [mspn_coco.md](./coco/mspn_coco.md) |
+| ResNetV1d-50 | 256x192 | 0.722 | 0.777 | [resnetv1d_coco.md](./coco/resnetv1d_coco.md) |
+| ResNeSt-50 | 256x192 | 0.720 | 0.775 | [resnest_coco.md](./coco/resnest_coco.md) |
+| ResNet-50 | 256x192 | 0.718 | 0.774 | [resnet_coco.md](./coco/resnet_coco.md) |
+| ResNeXt-50 | 256x192 | 0.715 | 0.771 | [resnext_coco.md](./coco/resnext_coco.md) |
+| PVT-S | 256x192 | 0.714 | 0.773 | [pvt_coco.md](./coco/pvt_coco.md) |
+| CSPNeXt-s | 256x192 | 0.697 | 0.753 | [cspnext_udp_coco.md](./coco/cspnext_udp_coco.md) |
+| LiteHRNet-30 | 256x192 | 0.676 | 0.736 | [litehrnet_coco.md](./coco/litehrnet_coco.md) |
+| CSPNeXt-tiny | 256x192 | 0.665 | 0.723 | [cspnext_udp_coco.md](./coco/cspnext_udp_coco.md) |
+| MobileNet-v2 | 256x192 | 0.648 | 0.709 | [mobilenetv2_coco.md](./coco/mobilenetv2_coco.md) |
+| LiteHRNet-18 | 256x192 | 0.642 | 0.705 | [litehrnet_coco.md](./coco/litehrnet_coco.md) |
+| CPM | 256x192 | 0.627 | 0.689 | [cpm_coco.md](./coco/cpm_coco.md) |
+| ShuffleNet-v2 | 256x192 | 0.602 | 0.668 | [shufflenetv2_coco.md](./coco/shufflenetv2_coco.md) |
+| ShuffleNet-v1 | 256x192 | 0.587 | 0.654 | [shufflenetv1_coco.md](./coco/shufflenetv1_coco.md) |
+| AlexNet | 256x192 | 0.448 | 0.521 | [alexnet_coco.md](./coco/alexnet_coco.md) |
+
+### MPII Dataset
+
+| Model | Input Size | PCKh@0.5 | PCKh@0.1 | Details and Download |
+| :------------: | :--------: | :------: | :------: | :-------------------------------------------------: |
+| HRNet-w48+Dark | 256x256 | 0.905 | 0.360 | [hrnet_dark_mpii.md](./mpii/hrnet_dark_mpii.md) |
+| HRNet-w48 | 256x256 | 0.902 | 0.303 | [hrnet_mpii.md](./mpii/cspnext_udp_mpii.md) |
+| HRNet-w48 | 256x256 | 0.901 | 0.337 | [hrnet_mpii.md](./mpii/hrnet_mpii.md) |
+| HRNet-w32 | 256x256 | 0.900 | 0.334 | [hrnet_mpii.md](./mpii/hrnet_mpii.md) |
+| HourglassNet | 256x256 | 0.889 | 0.317 | [hourglass_mpii.md](./mpii/hourglass_mpii.md) |
+| ResNet-152 | 256x256 | 0.889 | 0.303 | [resnet_mpii.md](./mpii/resnet_mpii.md) |
+| ResNetV1d-152 | 256x256 | 0.888 | 0.300 | [resnetv1d_mpii.md](./mpii/resnetv1d_mpii.md) |
+| SCNet-50 | 256x256 | 0.888 | 0.290 | [scnet_mpii.md](./mpii/scnet_mpii.md) |
+| ResNeXt-152 | 256x256 | 0.887 | 0.294 | [resnext_mpii.md](./mpii/resnext_mpii.md) |
+| SEResNet-50 | 256x256 | 0.884 | 0.292 | [seresnet_mpii.md](./mpii/seresnet_mpii.md) |
+| ResNet-50 | 256x256 | 0.882 | 0.286 | [resnet_mpii.md](./mpii/resnet_mpii.md) |
+| ResNetV1d-50 | 256x256 | 0.881 | 0.290 | [resnetv1d_mpii.md](./mpii/resnetv1d_mpii.md) |
+| CPM | 368x368\* | 0.876 | 0.285 | [cpm_mpii.md](./mpii/cpm_mpii.md) |
+| LiteHRNet-30 | 256x256 | 0.869 | 0.271 | [litehrnet_mpii.md](./mpii/litehrnet_mpii.md) |
+| LiteHRNet-18 | 256x256 | 0.859 | 0.260 | [litehrnet_mpii.md](./mpii/litehrnet_mpii.md) |
+| MobileNet-v2 | 256x256 | 0.854 | 0.234 | [mobilenetv2_mpii.md](./mpii/mobilenetv2_mpii.md) |
+| ShuffleNet-v2 | 256x256 | 0.828 | 0.205 | [shufflenetv2_mpii.md](./mpii/shufflenetv2_mpii.md) |
+| ShuffleNet-v1 | 256x256 | 0.824 | 0.195 | [shufflenetv1_mpii.md](./mpii/shufflenetv1_mpii.md) |
+
+### CrowdPose Dataset
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Model | Input Size | AP | AR | Details and Download |
+| :--------: | :--------: | :---: | :---: | :--------------------------------------------------------: |
+| HRNet-w32 | 256x192 | 0.675 | 0.816 | [hrnet_crowdpose.md](./crowdpose/hrnet_crowdpose.md) |
+| CSPNeXt-m | 256x192 | 0.662 | 0.755 | [hrnet_crowdpose.md](./crowdpose/cspnext_udp_crowdpose.md) |
+| ResNet-101 | 256x192 | 0.647 | 0.800 | [resnet_crowdpose.md](./crowdpose/resnet_crowdpose.md) |
+| HRNet-w32 | 256x192 | 0.637 | 0.785 | [resnet_crowdpose.md](./crowdpose/resnet_crowdpose.md) |
+
+### AIC Dataset
+
+Results on AIC val set with ground-truth bounding boxes.
+
+| Model | Input Size | AP | AR | Details and Download |
+| :--------: | :--------: | :---: | :---: | :----------------------------------: |
+| HRNet-w32 | 256x192 | 0.323 | 0.366 | [hrnet_aic.md](./aic/hrnet_aic.md) |
+| ResNet-101 | 256x192 | 0.294 | 0.337 | [resnet_aic.md](./aic/resnet_aic.md) |
+
+### JHMDB Dataset
+
+| Model | Input Size | PCK(norm. by person size) | PCK (norm. by torso size) | Details and Download |
+| :-------: | :--------: | :-----------------------: | :-----------------------: | :----------------------------------------: |
+| ResNet-50 | 256x256 | 96.0 | 80.1 | [resnet_jhmdb.md](./jhmdb/resnet_jhmdb.md) |
+| CPM | 368x368 | 89.8 | 65.7 | [cpm_jhmdb.md](./jhmdb/cpm_jhmdb.md) |
+
+### PoseTrack2018 Dataset
+
+Results on PoseTrack2018 val with ground-truth bounding boxes.
+
+| Model | Input Size | AP | Details and Download |
+| :-------: | :--------: | :--: | :----------------------------------------------------------: |
+| HRNet-w48 | 256x192 | 84.6 | [hrnet_posetrack18.md](./posetrack18/hrnet_posetrack18.md) |
+| HRNet-w32 | 256x192 | 83.4 | [hrnet_posetrack18.md](./posetrack18/hrnet_posetrack18.md) |
+| ResNet-50 | 256x192 | 81.2 | [resnet_posetrack18.md](./posetrack18/resnet_posetrack18.md) |
+
+### Human-Art Dataset
+
+Results on Human-Art validation dataset with detector having human AP of 56.2 on Human-Art validation dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------: | :--------: | :---: | :---: | :---------------------------------------------------: |
+| ViTPose-s | 256x192 | 0.381 | 0.448 | [vitpose_humanart.md](./humanart/vitpose_humanart.md) |
+| ViTPose-b | 256x192 | 0.410 | 0.475 | [vitpose_humanart.md](./humanart/vitpose_humanart.md) |
+
+Results on Human-Art validation dataset with ground-truth bounding-box
+
+| Model | Input Size | AP | AR | Details and Download |
+| :-------: | :--------: | :---: | :---: | :---------------------------------------------------: |
+| ViTPose-s | 256x192 | 0.738 | 0.768 | [vitpose_humanart.md](./humanart/vitpose_humanart.md) |
+| ViTPose-b | 256x192 | 0.759 | 0.790 | [vitpose_humanart.md](./humanart/vitpose_humanart.md) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.md b/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.md
new file mode 100644
index 0000000000000000000000000000000000000000..4b2cefcdcbe8909a7134a556f7da48881c6333c3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.md
@@ -0,0 +1,38 @@
+
+
+
+
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on AIC val set with ground-truth bounding boxes
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_hrnet-w32_8xb64-210e_aic-256x192.py) | 256x192 | 0.323 | 0.761 | 0.218 | 0.366 | 0.789 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_aic_256x192-30a4e465_20200826.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_aic_256x192_20200826.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.yml b/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0bbc52ccb8d3fc439887937333898f84ca40b167
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.yml
@@ -0,0 +1,18 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_hrnet-w32_8xb64-210e_aic-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture:
+ - HRNet
+ Training Data: AI Challenger
+ Name: td-hm_hrnet-w32_8xb64-210e_aic-256x192
+ Results:
+ - Dataset: AI Challenger
+ Metrics:
+ AP: 0.323
+ AP@0.5: 0.761
+ AP@0.75: 0.218
+ AR: 0.366
+ AR@0.5: 0.789
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_aic_256x192-30a4e465_20200826.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.md b/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.md
new file mode 100644
index 0000000000000000000000000000000000000000..1cb0f57eb38ac56e2aaaeef20ad7bda5cb240e96
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.md
@@ -0,0 +1,55 @@
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on AIC val set with ground-truth bounding boxes
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_res101_8xb64-210e_aic-256x192.py) | 256x192 | 0.294 | 0.736 | 0.172 | 0.337 | 0.762 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_aic_256x192-79b35445_20200826.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_aic_256x192_20200826.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.yml b/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.yml
new file mode 100644
index 0000000000000000000000000000000000000000..e320056858565d88ac3b1a4e3e4960019be02ffb
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_res101_8xb64-210e_aic-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: AI Challenger
+ Name: td-hm_res101_8xb64-210e_aic-256x192
+ Results:
+ - Dataset: AI Challenger
+ Metrics:
+ AP: 0.294
+ AP@0.5: 0.736
+ AP@0.75: 0.172
+ AR: 0.337
+ AR@0.5: 0.762
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_aic_256x192-79b35445_20200826.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_hrnet-w32_8xb64-210e_aic-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_hrnet-w32_8xb64-210e_aic-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d4c504d388fbe627ef7f62393e5135604403110
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_hrnet-w32_8xb64-210e_aic-256x192.py
@@ -0,0 +1,151 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=14,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AicDataset'
+data_mode = 'topdown'
+data_root = 'data/aic/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/aic_train.json',
+ data_prefix=dict(img='ai_challenger_keypoint_train_20170902/'
+ 'keypoint_train_images_20170902/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/aic_val.json',
+ data_prefix=dict(img='ai_challenger_keypoint_validation_20170911/'
+ 'keypoint_validation_images_20170911/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/aic_val.json',
+ use_area=False)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_res101_8xb64-210e_aic-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_res101_8xb64-210e_aic-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e61da3a5c4b6cbb89e78576c34ca8040f0fcca05
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/aic/td-hm_res101_8xb64-210e_aic-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AicDataset'
+data_mode = 'topdown'
+data_root = 'data/aic/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/aic_train.json',
+ data_prefix=dict(img='ai_challenger_keypoint_train_20170902/'
+ 'keypoint_train_images_20170902/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/aic_val.json',
+ data_prefix=dict(img='ai_challenger_keypoint_validation_20170911/'
+ 'keypoint_validation_images_20170911/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/aic_val.json',
+ use_area=False)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..6f82685ba81d28da32bfd9e578df397c9690ef5f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.md
@@ -0,0 +1,40 @@
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
+
+
+
+AlexNet (NeurIPS'2012)
+ +```bibtex +@inproceedings{krizhevsky2012imagenet, + title={Imagenet classification with deep convolutional neural networks}, + author={Krizhevsky, Alex and Sutskever, Ilya and Hinton, Geoffrey E}, + booktitle={Advances in neural information processing systems}, + pages={1097--1105}, + year={2012} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_alexnet](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_alexnet_8xb64-210e_coco-256x192.py) | 256x192 | 0.448 | 0.767 | 0.461 | 0.521 | 0.829 | [ckpt](https://download.openmmlab.com/mmpose/top_down/alexnet/alexnet_coco_256x192-a7b1fd15_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/alexnet/alexnet_coco_256x192_20200727.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0c851c3c793f7360617313a2b4f09e49ebc87484
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_alexnet_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - AlexNet
+ Training Data: COCO
+ Name: td-hm_alexnet_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.448
+ AP@0.5: 0.767
+ AP@0.75: 0.461
+ AR: 0.521
+ AR@0.5: 0.829
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/alexnet/alexnet_coco_256x192-a7b1fd15_20200727.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..3d4453a36986ccca8511e3f589dfac39cc3185ec
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.md
@@ -0,0 +1,41 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+CPM (CVPR'2016)
+ +```bibtex +@inproceedings{wei2016convolutional, + title={Convolutional pose machines}, + author={Wei, Shih-En and Ramakrishna, Varun and Kanade, Takeo and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={4724--4732}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [cpm](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192.py) | 256x192 | 0.627 | 0.862 | 0.709 | 0.689 | 0.906 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192-0e978875_20220920.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192_20220920.log) |
+| [cpm](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288.py) | 384x288 | 0.652 | 0.865 | 0.730 | 0.710 | 0.907 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288-165487b8_20221011.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288_20221011.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2c1cad9713c6a8be51e59ec67047267c8a425e1f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.yml
@@ -0,0 +1,40 @@
+Collections:
+- Name: CPM
+ Paper:
+ Title: Convolutional pose machines
+ URL: http://openaccess.thecvf.com/content_cvpr_2016/html/Wei_Convolutional_Pose_Machines_CVPR_2016_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/cpm.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192.py
+ In Collection: CPM
+ Metadata:
+ Architecture: &id001
+ - CPM
+ Training Data: COCO
+ Name: td-hm_cpm_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.627
+ AP@0.5: 0.862
+ AP@0.75: 0.709
+ AR: 0.689
+ AR@0.5: 0.906
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192-0e978875_20220920.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_cpm_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.652
+ AP@0.5: 0.865
+ AP@0.75: 0.730
+ AR: 0.710
+ AR@0.5: 0.907
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288-165487b8_20221011.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_aic-coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_aic-coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..fc1eb0d36c8b185369c8a722522f527fa37e0f8c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_aic-coco-256x192.py
@@ -0,0 +1,284 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# keypoint mappings
+keypoint_mapping_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+keypoint_mapping_aic = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ (12, 17),
+ (13, 18),
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=19,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ output_keypoint_indices=[
+ target for _, target in keypoint_mapping_coco
+ ]))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type='RepeatDataset',
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_coco)
+ ],
+ ),
+ times=3)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_aic)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6cce193544c775b5f4c749e3ca9c81ff547a507e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_coco-256x192.py
@@ -0,0 +1,214 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_aic-coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_aic-coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..096bf307859ee2946e8d42c66dc10ed23dbfe545
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_aic-coco-256x192.py
@@ -0,0 +1,284 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# keypoint mappings
+keypoint_mapping_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+keypoint_mapping_aic = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ (12, 17),
+ (13, 18),
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=19,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ output_keypoint_indices=[
+ target for _, target in keypoint_mapping_coco
+ ]))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type='RepeatDataset',
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_coco)
+ ],
+ ),
+ times=3)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_aic)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f86e9a8d609c2f200c888ad183f3cd890f35c388
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_coco-256x192.py
@@ -0,0 +1,214 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_aic-coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_aic-coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..94cc7d02d2789fd5a82ff9d352063f5afe99aaf0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_aic-coco-256x192.py
@@ -0,0 +1,284 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.0),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# keypoint mappings
+keypoint_mapping_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+keypoint_mapping_aic = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ (12, 17),
+ (13, 18),
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-s_imagenet_600e-ea671761.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=512,
+ out_channels=19,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ output_keypoint_indices=[
+ target for _, target in keypoint_mapping_coco
+ ]))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type='RepeatDataset',
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_coco)
+ ],
+ ),
+ times=3)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_aic)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f50542e5bceb86c652bf4d8ab893386197217ef
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_coco-256x192.py
@@ -0,0 +1,214 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-s_imagenet_600e-ea671761.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=512,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_aic-coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_aic-coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..cef1b204501573d4e0d3228c36595eb784fdc83b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_aic-coco-256x192.py
@@ -0,0 +1,284 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.0),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# keypoint mappings
+keypoint_mapping_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+keypoint_mapping_aic = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ (12, 17),
+ (13, 18),
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-tiny_imagenet_600e-3a2dd350.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=384,
+ out_channels=19,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ output_keypoint_indices=[
+ target for _, target in keypoint_mapping_coco
+ ]))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type='RepeatDataset',
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_coco)
+ ],
+ ),
+ times=3)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='aic/annotations/aic_train.json',
+ data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint'
+ '_train_20170902/keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_aic)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ec0bb2be7dbd59be7401cca1d4995d7741ee2b6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_coco-256x192.py
@@ -0,0 +1,214 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 105 to 210 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-tiny_imagenet_600e-3a2dd350.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=384,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ # bbox_file='data/coco/person_detection_results/'
+ # 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..7aad2bf6b31428bb8ff52149d0e8cb9f85820709
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.md
@@ -0,0 +1,69 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_cspnext_t_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_coco-256x192.py) | 256x192 | 0.665 | 0.874 | 0.723 | 0.723 | 0.917 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-coco_pt-in1k_210e-256x192-0908dd2d_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-coco_pt-in1k_210e-256x192-0908dd2d_20230123.json) |
+| [pose_cspnext_s_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_coco-256x192.py) | 256x192 | 0.697 | 0.886 | 0.776 | 0.753 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-coco_pt-in1k_210e-256x192-92dbfc1d_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-coco_pt-in1k_210e-256x192-92dbfc1d_20230123.json) |
+| [pose_cspnext_m_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_coco-256x192.py) | 256x192 | 0.732 | 0.896 | 0.806 | 0.785 | 0.937 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco_pt-in1k_210e-256x192-95f5967e_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco_pt-in1k_210e-256x192-95f5967e_20230123.json) |
+| [pose_cspnext_l_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_coco-256x192.py) | 256x192 | 0.750 | 0.904 | 0.822 | 0.800 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-coco_pt-in1k_210e-256x192-661cdd8c_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-coco_pt-in1k_210e-256x192-661cdd8c_20230123.json) |
+| [pose_cspnext_t_udp_aic_coco](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_aic-coco-256x192.py) | 256x192 | 0.655 | 0.884 | 0.731 | 0.689 | 0.890 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.json) |
+| [pose_cspnext_s_udp_aic_coco](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_aic-coco-256x192.py) | 256x192 | 0.700 | 0.905 | 0.783 | 0.733 | 0.918 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.json) |
+| [pose_cspnext_m_udp_aic_coco](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_aic-coco-256x192.py) | 256x192 | 0.748 | 0.925 | 0.818 | 0.777 | 0.933 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.json) |
+| [pose_cspnext_l_udp_aic_coco](/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_aic-coco-256x192.py) | 256x192 | 0.772 | 0.936 | 0.839 | 0.799 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.json) |
+
+Note that, UDP also adopts the unbiased encoding/decoding algorithm of [DARK](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#darkpose-cvpr-2020).
+
+Flip test and detector is not used in the result of aic-coco training.
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..aab5c44e1b651eb86335f0afee53872e5a5c5c34
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.yml
@@ -0,0 +1,139 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: &id001
+ - CSPNeXt
+ - UDP
+ Training Data: COCO
+ Name: cspnext-tiny_udp_8xb256-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.665
+ AP@0.5: 0.874
+ AP@0.75: 0.723
+ AR: 0.723
+ AR@0.5: 0.917
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-coco_pt-in1k_210e-256x192-0908dd2d_20230123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: cspnext-s_udp_8xb256-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.697
+ AP@0.5: 0.886
+ AP@0.75: 0.776
+ AR: 0.753
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-coco_pt-in1k_210e-256x192-92dbfc1d_20230123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: cspnext-m_udp_8xb256-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.732
+ AP@0.5: 0.896
+ AP@0.75: 0.806
+ AR: 0.785
+ AR@0.5: 0.937
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco_pt-in1k_210e-256x192-95f5967e_20230123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: cspnext-l_udp_8xb256-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.750
+ AP@0.5: 0.904
+ AP@0.75: 0.822
+ AR: 0.8
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-coco_pt-in1k_210e-256x192-661cdd8c_20230123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-tiny_udp_8xb256-210e_aic-coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AIC
+ Name: cspnext-tiny_udp_8xb256-210e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.655
+ AP@0.5: 0.884
+ AP@0.75: 0.731
+ AR: 0.689
+ AR@0.5: 0.89
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-s_udp_8xb256-210e_aic-coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AIC
+ Name: cspnext-s_udp_8xb256-210e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.7
+ AP@0.5: 0.905
+ AP@0.75: 0.783
+ AR: 0.733
+ AR@0.5: 0.918
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-m_udp_8xb256-210e_aic-coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AIC
+ Name: cspnext-m_udp_8xb256-210e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.925
+ AP@0.75: 0.818
+ AR: 0.777
+ AR@0.5: 0.933
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/cspnext-l_udp_8xb256-210e_aic-coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AIC
+ Name: cspnext-l_udp_8xb256-210e_aic-coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.772
+ AP@0.5: 0.936
+ AP@0.75: 0.839
+ AR: 0.799
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..dc7dee47c3ec6917f3fffb034e36df3a5a226504
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.md
@@ -0,0 +1,42 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hourglass_52](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-256x256.py) | 256x256 | 0.726 | 0.896 | 0.799 | 0.780 | 0.934 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_256x256-4ec713ba_20200709.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_256x256_20200709.log.json) |
+| [pose_hourglass_52](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-384x384.py) | 384x384 | 0.746 | 0.900 | 0.812 | 0.797 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_384x384-be91ba2b_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_384x384_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6d9cfd91e99a8d53a437f4d71e318fb1226b18e6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.yml
@@ -0,0 +1,40 @@
+Collections:
+- Name: Hourglass
+ Paper:
+ Title: Stacked hourglass networks for human pose estimation
+ URL: https://link.springer.com/chapter/10.1007/978-3-319-46484-8_29
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hourglass.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-256x256.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture: &id001
+ - Hourglass
+ Training Data: COCO
+ Name: td-hm_hourglass52_8xb32-210e_coco-256x256
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.726
+ AP@0.5: 0.896
+ AP@0.75: 0.799
+ AR: 0.780
+ AR@0.5: 0.934
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_256x256-4ec713ba_20200709.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-384x384.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hourglass52_8xb32-210e_coco-384x384
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.746
+ AP@0.5: 0.900
+ AP@0.75: 0.812
+ AR: 0.797
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_coco_384x384-be91ba2b_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..ef793f06fc392006ea57e9ece676b610e675bbf1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.md
@@ -0,0 +1,43 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRFormer (NIPS'2021)
+ +```bibtex +@article{yuan2021hrformer, + title={HRFormer: High-Resolution Vision Transformer for Dense Predict}, + author={Yuan, Yuhui and Fu, Rao and Huang, Lang and Lin, Weihong and Zhang, Chao and Chen, Xilin and Wang, Jingdong}, + journal={Advances in Neural Information Processing Systems}, + volume={34}, + year={2021} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrformer_small](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-256x192.py) | 256x192 | 0.738 | 0.904 | 0.812 | 0.793 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_256x192-5310d898_20220316.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_256x192_20220316.log.json) |
+| [pose_hrformer_small](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-384x288.py) | 384x288 | 0.757 | 0.905 | 0.824 | 0.807 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_384x288-98d237ed_20220316.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_384x288_20220316.log.json) |
+| [pose_hrformer_base](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-256x192.py) | 256x192 | 0.754 | 0.906 | 0.827 | 0.807 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_256x192-6f5f1169_20220316.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_256x192_20220316.log.json) |
+| [pose_hrformer_base](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-384x288.py) | 384x288 | 0.774 | 0.909 | 0.842 | 0.823 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_384x288-ecf0758d_20220316.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_384x288_20220316.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..5ac7dc3636a7a020a396db422d8de1521a172cd1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.yml
@@ -0,0 +1,72 @@
+Collections:
+- Name: HRFormer
+ Paper:
+ Title: 'HRFormer: High-Resolution Vision Transformer for Dense Predict'
+ URL: https://proceedings.neurips.cc/paper/2021/hash/3bbfdde8842a5c44a0323518eec97cbe-Abstract.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hrformer.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-256x192.py
+ In Collection: HRFormer
+ Metadata:
+ Architecture: &id001
+ - HRFormer
+ Training Data: COCO
+ Name: td-hm_hrformer-small_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.738
+ AP@0.5: 0.904
+ AP@0.75: 0.812
+ AR: 0.793
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_256x192-5310d898_20220316.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-384x288.py
+ In Collection: HRFormer
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrformer-small_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.757
+ AP@0.5: 0.905
+ AP@0.75: 0.824
+ AR: 0.807
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_small_coco_384x288-98d237ed_20220316.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-256x192.py
+ In Collection: HRFormer
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrformer-base_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.906
+ AP@0.75: 0.827
+ AR: 0.807
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_256x192-6f5f1169_20220316.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-384x288.py
+ In Collection: HRFormer
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrformer-base_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.774
+ AP@0.5: 0.909
+ AP@0.75: 0.842
+ AR: 0.823
+ AR@0.5: 0.945
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrformer/hrformer_base_coco_384x288-ecf0758d_20220316.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..efe9cd27b91e2189760dec73682b997e2be58b95
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.md
@@ -0,0 +1,62 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+Albumentations (Information'2020)
+ +```bibtex +@article{buslaev2020albumentations, + title={Albumentations: fast and flexible image augmentations}, + author={Buslaev, Alexander and Iglovikov, Vladimir I and Khvedchenya, Eugene and Parinov, Alex and Druzhinin, Mikhail and Kalinin, Alexandr A}, + journal={Information}, + volume={11}, + number={2}, + pages={125}, + year={2020}, + publisher={Multidisciplinary Digital Publishing Institute} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [coarsedropout](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192.py) | 256x192 | 0.753 | 0.908 | 0.822 | 0.805 | 0.944 | [ckpt](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_coarsedropout-0f16a0ce_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_coarsedropout_20210320.log.json) |
+| [gridmask](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192.py) | 256x192 | 0.752 | 0.906 | 0.825 | 0.804 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_gridmask-868180df_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_gridmask_20210320.log.json) |
+| [photometric](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192.py) | 256x192 | 0.754 | 0.908 | 0.825 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_photometric-308cf591_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_photometric_20210320.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7a29de4f64a702fddb2f42d9527c1762879f89b1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.yml
@@ -0,0 +1,56 @@
+Collections:
+- Name: Albumentations
+ Paper:
+ Title: 'Albumentations: fast and flexible image augmentations'
+ URL: https://www.mdpi.com/649002
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/albumentations.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192.py
+ In Collection: Albumentations
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.753
+ AP@0.5: 0.908
+ AP@0.75: 0.822
+ AR: 0.805
+ AR@0.5: 0.944
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_coarsedropout-0f16a0ce_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192.py
+ In Collection: Albumentations
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.752
+ AP@0.5: 0.906
+ AP@0.75: 0.825
+ AR: 0.804
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_gridmask-868180df_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192.py
+ In Collection: Albumentations
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.908
+ AP@0.75: 0.825
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/augmentation/hrnet_w32_coco_256x192_photometric-308cf591_20210320.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..51fbf1322e474f8dd5cb8ca46de7c14a9bb26540
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.md
@@ -0,0 +1,43 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) | 256x192 | 0.749 | 0.906 | 0.821 | 0.804 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288.py) | 384x288 | 0.761 | 0.908 | 0.826 | 0.811 | 0.944 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288-ca5956af_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288_20220909.log) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py) | 256x192 | 0.756 | 0.908 | 0.826 | 0.809 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288.py) | 384x288 | 0.767 | 0.911 | 0.832 | 0.817 | 0.947 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288-c161b7de_20220915.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288_20220915.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a0e5debe859ccc059e892b28d85aadb11f1a1857
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.yml
@@ -0,0 +1,124 @@
+Collections:
+- Name: HRNet
+ Paper:
+ Title: Deep high-resolution representation learning for human pose estimation
+ URL: http://openaccess.thecvf.com/content_CVPR_2019/html/Sun_Deep_High-Resolution_Representation_Learning_for_Human_Pose_Estimation_CVPR_2019_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hrnet.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.746
+ AP@0.5: 0.904
+ AP@0.75: 0.819
+ AR: 0.799
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.76
+ AP@0.5: 0.906
+ AP@0.75: 0.83
+ AR: 0.81
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288-ca5956af_20220909.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.756
+ AP@0.5: 0.907
+ AP@0.75: 0.825
+ AR: 0.806
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.767
+ AP@0.5: 0.91
+ AP@0.75: 0.831
+ AR: 0.816
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288-c161b7de_20220915.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AI Challenger
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.757
+ AP@0.5: 0.907
+ AP@0.75: 0.829
+ AR: 0.809
+ AR@0.5: 0.944
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge-b05435b9_20221025.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data:
+ - COCO
+ - AI Challenger
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.756
+ AP@0.5: 0.906
+ AP@0.75: 0.826
+ AR: 0.807
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine-4ce66880_20221026.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.749
+ AP@0.5: 0.907
+ AP@0.75: 0.822
+ AR: 0.802
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192-f1e84e3b_20220914.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco_aic.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco_aic.md
new file mode 100644
index 0000000000000000000000000000000000000000..1e066d563ca460bccb8294e9a1b9ffa3b7a33d51
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco_aic.md
@@ -0,0 +1,61 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+MMPose supports training model with combined datasets. [coco-aic-merge](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py) and [coco-aic-combine](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py) are two examples.
+
+- [coco-aic-merge](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py) leverages AIC data with partial keypoints as auxiliary data to train a COCO model
+- [coco-aic-combine](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py) constructs a combined dataset whose keypoints are the union of COCO and AIC keypoints to train a model that predicts keypoints of both datasets.
+
+Evaluation results on COCO val2017 of models trained with solely COCO dataset and combined dataset as shown below. These models are evaluated with detector having human AP of 56.4 on COCO val2017 dataset.
+
+| Train Set | Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :------------------------------------------- | :------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------: | :------------------------------------: |
+| [coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) | pose_hrnet_w32 | 256x192 | 0.749 | 0.906 | 0.821 | 0.804 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) |
+| [coco-aic-merge](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py) | pose_hrnet_w32 | 256x192 | 0.756 | 0.907 | 0.828 | 0.809 | 0.944 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge-a9ea6d77_20230818.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge_20230818.json) |
+| [coco-aic-combine](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py) | pose_hrnet_w32 | 256x192 | 0.755 | 0.904 | 0.825 | 0.807 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine-458125cc_20230818.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine_20230818.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..c18382ec68035c0f7d560d782bbb44b5af2d5024
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.md
@@ -0,0 +1,60 @@
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192.py) | 256x192 | 0.757 | 0.907 | 0.825 | 0.807 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192-0e00bf12_20220914.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192_20220914.log) |
+| [pose_hrnet_w32_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288.py) | 384x288 | 0.766 | 0.907 | 0.829 | 0.815 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288-9bab4c9b_20220917.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288_20220917.log) |
+| [pose_hrnet_w48_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192.py) | 256x192 | 0.764 | 0.907 | 0.831 | 0.814 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192-e1ebdd6f_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288.py) | 384x288 | 0.772 | 0.911 | 0.833 | 0.821 | 0.948 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288-39c3c381_20220916.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288_20220916.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9f14e9ffad78d3d36f5f89f2166c6b3cda7ab2ff
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.yml
@@ -0,0 +1,73 @@
+Collections:
+- Name: DarkPose
+ Paper:
+ Title: Distribution-aware coordinate representation for human pose estimation
+ URL: http://openaccess.thecvf.com/content_CVPR_2020/html/Zhang_Distribution-Aware_Coordinate_Representation_for_Human_Pose_Estimation_CVPR_2020_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/dark.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ - DarkPose
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.757
+ AP@0.5: 0.907
+ AP@0.75: 0.825
+ AR: 0.807
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192-0e00bf12_20220914.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.766
+ AP@0.5: 0.907
+ AP@0.75: 0.829
+ AR: 0.815
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288-9bab4c9b_20220917.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.764
+ AP@0.5: 0.907
+ AP@0.75: 0.831
+ AR: 0.814
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192-e1ebdd6f_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.772
+ AP@0.5: 0.911
+ AP@0.75: 0.833
+ AR: 0.821
+ AR@0.5: 0.948
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288-39c3c381_20220916.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_fp16_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_fp16_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..3e52624dc760eaf8bc4d6c7f75a29c4e1747a6e0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_fp16_coco.md
@@ -0,0 +1,56 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+FP16 (ArXiv'2017)
+ +```bibtex +@article{micikevicius2017mixed, + title={Mixed precision training}, + author={Micikevicius, Paulius and Narang, Sharan and Alben, Jonah and Diamos, Gregory and Elsen, Erich and Garcia, David and Ginsburg, Boris and Houston, Michael and Kuchaiev, Oleksii and Venkatesh, Ganesh and others}, + journal={arXiv preprint arXiv:1710.03740}, + year={2017} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32_fp16](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192.py) | 256x192 | 0.749 | 0.907 | 0.822 | 0.802 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192-f1e84e3b_20220914.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192_20220914.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..2b85d85a25125cb8eef083a87e597591850a1402
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.md
@@ -0,0 +1,63 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192.py) | 256x192 | 0.762 | 0.907 | 0.829 | 0.810 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192-73ede547_20220914.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192_20220914.log) |
+| [pose_hrnet_w32_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288.py) | 384x288 | 0.768 | 0.909 | 0.832 | 0.815 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288-9a3f7c85_20220914.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288_20220914.log) |
+| [pose_hrnet_w48_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py) | 256x192 | 0.768 | 0.908 | 0.833 | 0.817 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192-3feaef8f_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48_udp](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288.py) | 384x288 | 0.773 | 0.911 | 0.836 | 0.821 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288-70d7ab01_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288_20220913.log) |
+| [pose_hrnet_w32_udp_regress](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192.py) | 256x192 | 0.759 | 0.907 | 0.827 | 0.813 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192-9c0b77b4_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192_20220226.log) |
+
+Note that, UDP also adopts the unbiased encoding/decoding algorithm of [DARK](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#darkpose-cvpr-2020).
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..01cba761ec4a97c8d84273de7f2cf720de62ed5b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.yml
@@ -0,0 +1,90 @@
+Collections:
+- Name: UDP
+ Paper:
+ Title: 'The Devil Is in the Details: Delving Into Unbiased Data Processing for
+ Human Pose Estimation'
+ URL: http://openaccess.thecvf.com/content_CVPR_2020/html/Huang_The_Devil_Is_in_the_Details_Delving_Into_Unbiased_Data_CVPR_2020_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/udp.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ - UDP
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.762
+ AP@0.5: 0.907
+ AP@0.75: 0.829
+ AR: 0.810
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192-73ede547_20220914.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.768
+ AP@0.5: 0.909
+ AP@0.75: 0.832
+ AR: 0.815
+ AR@0.5: 0.945
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288-9a3f7c85_20220914.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.768
+ AP@0.5: 0.908
+ AP@0.75: 0.833
+ AR: 0.817
+ AR@0.5: 0.945
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192-3feaef8f_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.773
+ AP@0.5: 0.911
+ AP@0.75: 0.836
+ AR: 0.821
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288-70d7ab01_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.759
+ AP@0.5: 0.907
+ AP@0.75: 0.827
+ AR: 0.813
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192-9c0b77b4_20220926.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..28f608d54af3d7098886a077dbdfd5b7f4e50b4f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.md
@@ -0,0 +1,42 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+LiteHRNet (CVPR'2021)
+ +```bibtex +@inproceedings{Yulitehrnet21, + title={Lite-HRNet: A Lightweight High-Resolution Network}, + author={Yu, Changqian and Xiao, Bin and Gao, Changxin and Yuan, Lu and Zhang, Lei and Sang, Nong and Wang, Jingdong}, + booktitle={CVPR}, + year={2021} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [LiteHRNet-18](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb64-210e_coco-256x192.py) | 256x192 | 0.642 | 0.867 | 0.719 | 0.705 | 0.911 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_256x192-6bace359_20211230.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_256x192_20211230.log.json) |
+| [LiteHRNet-18](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb32-210e_coco-384x288.py) | 384x288 | 0.676 | 0.876 | 0.746 | 0.735 | 0.919 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_384x288-8d4dac48_20211230.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_384x288_20211230.log.json) |
+| [LiteHRNet-30](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb64-210e_coco-256x192.py) | 256x192 | 0.676 | 0.880 | 0.756 | 0.736 | 0.922 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_256x192-4176555b_20210626.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_256x192_20210626.log.json) |
+| [LiteHRNet-30](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb32-210e_coco-384x288.py) | 384x288 | 0.700 | 0.883 | 0.776 | 0.758 | 0.926 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_384x288-a3aef5c4_20210626.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_384x288_20210626.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f92360587237823bde9ce0f042c08c8f5915ca3f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.yml
@@ -0,0 +1,72 @@
+Collections:
+- Name: LiteHRNet
+ Paper:
+ Title: 'Lite-HRNet: A Lightweight High-Resolution Network'
+ URL: https://arxiv.org/abs/2104.06403
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/litehrnet.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb64-210e_coco-256x192.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: &id001
+ - LiteHRNet
+ Training Data: COCO
+ Name: td-hm_litehrnet-18_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.642
+ AP@0.5: 0.867
+ AP@0.75: 0.719
+ AR: 0.705
+ AR@0.5: 0.911
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_256x192-6bace359_20211230.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb32-210e_coco-384x288.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_litehrnet-18_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.676
+ AP@0.5: 0.876
+ AP@0.75: 0.746
+ AR: 0.735
+ AR@0.5: 0.919
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_coco_384x288-8d4dac48_20211230.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb64-210e_coco-256x192.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_litehrnet-30_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.676
+ AP@0.5: 0.88
+ AP@0.75: 0.756
+ AR: 0.736
+ AR@0.5: 0.922
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_256x192-4176555b_20210626.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb32-210e_coco-384x288.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_litehrnet-30_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.7
+ AP@0.5: 0.883
+ AP@0.75: 0.776
+ AR: 0.758
+ AR@0.5: 0.926
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_coco_384x288-a3aef5c4_20210626.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..aed9fd0246bf4d6f0d3379d7317478ab9013eef2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.md
@@ -0,0 +1,41 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_mobilenetv2](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192.py) | 256x192 | 0.648 | 0.874 | 0.725 | 0.709 | 0.918 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192-55a04c35_20221016.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192_20221016.log) |
+| [pose_mobilenetv2](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288.py) | 384x288 | 0.677 | 0.882 | 0.746 | 0.734 | 0.920 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288-d3ab1457_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288_20221013.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c7993fe516dd6a79895ed08f50c624d23c4ee0aa
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.yml
@@ -0,0 +1,35 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: COCO
+ Name: td-hm_mobilenetv2_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.648
+ AP@0.5: 0.874
+ AP@0.75: 0.725
+ AR: 0.709
+ AR@0.5: 0.918
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192-55a04c35_20221016.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_mobilenetv2_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.677
+ AP@0.5: 0.882
+ AP@0.75: 0.746
+ AR: 0.734
+ AR@0.5: 0.920
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288-d3ab1457_20221013.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..d86bc2c2ada7c560e1e2770a1e864c27a8417d3c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.md
@@ -0,0 +1,42 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+MSPN (ArXiv'2019)
+ +```bibtex +@article{li2019rethinking, + title={Rethinking on Multi-Stage Networks for Human Pose Estimation}, + author={Li, Wenbo and Wang, Zhicheng and Yin, Binyi and Peng, Qixiang and Du, Yuming and Xiao, Tianzi and Yu, Gang and Lu, Hongtao and Wei, Yichen and Sun, Jian}, + journal={arXiv preprint arXiv:1901.00148}, + year={2019} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [mspn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mspn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.723 | 0.895 | 0.794 | 0.788 | 0.934 | [ckpt](https://download.openmmlab.com/mmpose/top_down/mspn/mspn50_coco_256x192-8fbfb5d0_20201123.pth) | [log](https://download.openmmlab.com/mmpose/top_down/mspn/mspn50_coco_256x192_20201123.log.json) |
+| [2xmspn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xmspn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.754 | 0.903 | 0.826 | 0.816 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/top_down/mspn/2xmspn50_coco_256x192-c8765a5c_20201123.pth) | [log](https://download.openmmlab.com/mmpose/top_down/mspn/2xmspn50_coco_256x192_20201123.log.json) |
+| [3xmspn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xmspn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.758 | 0.904 | 0.830 | 0.821 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/mspn/3xmspn50_coco_256x192-e348f18e_20201123.pth) | [log](https://download.openmmlab.com/mmpose/top_down/mspn/3xmspn50_coco_256x192_20201123.log.json) |
+| [4xmspn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_4xmspn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.765 | 0.906 | 0.835 | 0.826 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/mspn/4xmspn50_coco_256x192-7b837afb_20201123.pth) | [log](https://download.openmmlab.com/mmpose/top_down/mspn/4xmspn50_coco_256x192_20201123.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..77eca18b6f50220650671a6f2b88eabd06a14baf
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.yml
@@ -0,0 +1,72 @@
+Collections:
+- Name: MSPN
+ Paper:
+ Title: Rethinking on Multi-Stage Networks for Human Pose Estimation
+ URL: https://arxiv.org/abs/1901.00148
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/mspn.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mspn50_8xb32-210e_coco-256x192.py
+ In Collection: MSPN
+ Metadata:
+ Architecture: &id001
+ - MSPN
+ Training Data: COCO
+ Name: td-hm_mspn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.723
+ AP@0.5: 0.895
+ AP@0.75: 0.794
+ AR: 0.788
+ AR@0.5: 0.934
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/mspn/mspn50_coco_256x192-8fbfb5d0_20201123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xmspn50_8xb32-210e_coco-256x192.py
+ In Collection: MSPN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_2xmspn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.903
+ AP@0.75: 0.826
+ AR: 0.816
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/mspn/2xmspn50_coco_256x192-c8765a5c_20201123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xmspn50_8xb32-210e_coco-256x192.py
+ In Collection: MSPN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_3xmspn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.758
+ AP@0.5: 0.904
+ AP@0.75: 0.83
+ AR: 0.821
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/mspn/3xmspn50_coco_256x192-e348f18e_20201123.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_4xmspn50_8xb32-210e_coco-256x192.py
+ In Collection: MSPN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_4xmspn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.765
+ AP@0.5: 0.906
+ AP@0.75: 0.835
+ AR: 0.826
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/mspn/4xmspn50_coco_256x192-7b837afb_20201123.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..8a375a4c2022442f0ce1cb19820da0cea5a1e802
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.md
@@ -0,0 +1,57 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+PVT (ICCV'2021)
+ +```bibtex +@inproceedings{wang2021pyramid, + title={Pyramid vision transformer: A versatile backbone for dense prediction without convolutions}, + author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={568--578}, + year={2021} +} +``` + +
+
+
+
+
+PVTV2 (CVMJ'2022)
+ +```bibtex +@article{wang2022pvt, + title={PVT v2: Improved baselines with Pyramid Vision Transformer}, + author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling}, + journal={Computational Visual Media}, + pages={1--10}, + year={2022}, + publisher={Springer} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_pvt-s](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvt-s_8xb64-210e_coco-256x192.py) | 256x192 | 0.714 | 0.896 | 0.794 | 0.773 | 0.936 | [ckpt](https://download.openmmlab.com/mmpose/top_down/pvt/pvt_small_coco_256x192-4324a49d_20220501.pth) | [log](https://download.openmmlab.com/mmpose/top_down/pvt/pvt_small_coco_256x192_20220501.log.json) |
+| [pose_pvtv2-b2](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvtv2-b2_8xb64-210e_coco-256x192.py) | 256x192 | 0.737 | 0.905 | 0.812 | 0.791 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/top_down/pvt/pvtv2_b2_coco_256x192-b4212737_20220501.pth) | [log](https://download.openmmlab.com/mmpose/top_down/pvt/pvtv2_b2_coco_256x192_20220501.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2b4303d7040486806f98e01edb6d296538c3089f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.yml
@@ -0,0 +1,35 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvt-s_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - PVT
+ Training Data: COCO
+ Name: td-hm_pvt-s_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.714
+ AP@0.5: 0.896
+ AP@0.75: 0.794
+ AR: 0.773
+ AR@0.5: 0.936
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/pvt/pvt_small_coco_256x192-4324a49d_20220501.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvtv2-b2_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_pvtv2-b2_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.905
+ AP@0.75: 0.812
+ AR: 0.791
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/pvt/pvtv2_b2_coco_256x192-b4212737_20220501.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..cb7ada4d6b72dfea2a029773148ed852ba00b1a8
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.md
@@ -0,0 +1,46 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ResNeSt (ArXiv'2020)
+ +```bibtex +@article{zhang2020resnest, + title={ResNeSt: Split-Attention Networks}, + author={Zhang, Hang and Wu, Chongruo and Zhang, Zhongyue and Zhu, Yi and Zhang, Zhi and Lin, Haibin and Sun, Yue and He, Tong and Muller, Jonas and Manmatha, R. and Li, Mu and Smola, Alexander}, + journal={arXiv preprint arXiv:2004.08955}, + year={2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnest_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-256x192.py) | 256x192 | 0.720 | 0.899 | 0.800 | 0.775 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_256x192-6e65eece_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_256x192_20210320.log.json) |
+| [pose_resnest_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-384x288.py) | 384x288 | 0.737 | 0.900 | 0.811 | 0.789 | 0.937 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_384x288-dcd20436_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_384x288_20210320.log.json) |
+| [pose_resnest_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb64-210e_coco-256x192.py) | 256x192 | 0.725 | 0.900 | 0.807 | 0.781 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_256x192-2ffcdc9d_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_256x192_20210320.log.json) |
+| [pose_resnest_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb32-210e_coco-384x288.py) | 384x288 | 0.745 | 0.905 | 0.818 | 0.798 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_384x288-80660658_20210320.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_384x288_20210320.log.json) |
+| [pose_resnest_200](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb64-210e_coco-256x192.py) | 256x192 | 0.731 | 0.905 | 0.812 | 0.787 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_256x192-db007a48_20210517.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_256x192_20210517.log.json) |
+| [pose_resnest_200](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb16-210e_coco-384x288.py) | 384x288 | 0.753 | 0.907 | 0.827 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_384x288-b5bb76cb_20210517.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_384x288_20210517.log.json) |
+| [pose_resnest_269](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb32-210e_coco-256x192.py) | 256x192 | 0.737 | 0.907 | 0.819 | 0.792 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_256x192-2a7882ac_20210517.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_256x192_20210517.log.json) |
+| [pose_resnest_269](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb16-210e_coco-384x288.py) | 384x288 | 0.754 | 0.908 | 0.828 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_384x288-b142b9fb_20210517.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_384x288_20210517.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..082c6a0aa278868876a472edbb747813b95281ac
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.yml
@@ -0,0 +1,131 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNeSt
+ Training Data: COCO
+ Name: td-hm_resnest50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.720
+ AP@0.5: 0.899
+ AP@0.75: 0.8
+ AR: 0.775
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_256x192-6e65eece_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest50_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.9
+ AP@0.75: 0.811
+ AR: 0.789
+ AR@0.5: 0.937
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest50_coco_384x288-dcd20436_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.725
+ AP@0.5: 0.9
+ AP@0.75: 0.807
+ AR: 0.781
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_256x192-2ffcdc9d_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest101_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.745
+ AP@0.5: 0.905
+ AP@0.75: 0.818
+ AR: 0.798
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest101_coco_384x288-80660658_20210320.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest200_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.731
+ AP@0.5: 0.905
+ AP@0.75: 0.812
+ AR: 0.787
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_256x192-db007a48_20210517.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb16-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest200_8xb16-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.753
+ AP@0.5: 0.907
+ AP@0.75: 0.827
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest200_coco_384x288-b5bb76cb_20210517.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest269_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.907
+ AP@0.75: 0.819
+ AR: 0.792
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_256x192-2a7882ac_20210517.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb16-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnest269_8xb16-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.908
+ AP@0.75: 0.828
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnest/resnest269_coco_384x288-b142b9fb_20210517.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..dbe14267edc6271c1b8cda43cbbfba6be17d4689
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.md
@@ -0,0 +1,68 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py) | 256x192 | 0.718 | 0.898 | 0.796 | 0.774 | 0.934 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192-04af38ce_20220923.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192_20220923.log) |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288.py) | 384x288 | 0.731 | 0.900 | 0.799 | 0.782 | 0.937 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288-7b8db90e_20220923.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288_20220923.log) |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192.py) | 256x192 | 0.728 | 0.904 | 0.809 | 0.783 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192-065d3625_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192_20220926.log) |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb32-210e_coco-384x288.py) | 384x288 | 0.749 | 0.906 | 0.817 | 0.799 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192-065d3625_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192_20220926.log) |
+| [pose_resnet_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192.py) | 256x192 | 0.736 | 0.904 | 0.818 | 0.791 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192-0345f330_20220928.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192_20220928.log) |
+| [pose_resnet_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288.py) | 384x288 | 0.750 | 0.908 | 0.821 | 0.800 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288-7fbb906f_20220927.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288_20220927.log) |
+
+The following model is equipped with a visibility prediction head and has been trained using COCO and AIC datasets.
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm-vis_res50_8xb64-210e_coco-aic-256x192-merge.py) | 256x192 | 0.729 | 0.900 | 0.807 | 0.783 | 0.938 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm-vis_res50_8xb64-210e_coco-aic-256x192-merge-21815b2c_20230726.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192_20220923.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..296be8898bc73d00923eef74d7275802ae9f7c9e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.yml
@@ -0,0 +1,121 @@
+Collections:
+- Name: SimpleBaseline2D
+ Paper:
+ Title: Simple baselines for human pose estimation and tracking
+ URL: http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/simplebaseline2d.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: COCO
+ Name: td-hm_res50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.718
+ AP@0.5: 0.898
+ AP@0.75: 0.796
+ AR: 0.774
+ AR@0.5: 0.934
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192-04af38ce_20220923.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res50_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.731
+ AP@0.5: 0.9
+ AP@0.75: 0.799
+ AR: 0.782
+ AR@0.5: 0.937
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288-7b8db90e_20220923.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.728
+ AP@0.5: 0.904
+ AP@0.75: 0.809
+ AR: 0.783
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192-065d3625_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res101_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.749
+ AP@0.5: 0.906
+ AP@0.75: 0.817
+ AR: 0.799
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192-065d3625_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res152_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.736
+ AP@0.5: 0.904
+ AP@0.75: 0.818
+ AR: 0.791
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192-0345f330_20220928.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res152_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.75
+ AP@0.5: 0.908
+ AP@0.75: 0.821
+ AR: 0.8
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288-7fbb906f_20220927.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res50_fp16-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.716
+ AP@0.5: 0.898
+ AP@0.75: 0.798
+ AR: 0.772
+ AR@0.5: 0.937
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192-463da051_20220927.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..6f1b0107f30e336df3004788a174d4bfd2f7aef0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.md
@@ -0,0 +1,79 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192.py) | 256x192 | 0.724 | 0.897 | 0.797 | 0.777 | 0.934 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192-c129dcb6_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192_20220926.log) |
+| [pose_resnet_50_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288.py) | 384x288 | 0.735 | 0.902 | 0.801 | 0.786 | 0.938 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288-8b90b538_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288_20220926.log) |
+| [pose_resnet_101_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192.py) | 256x192 | 0.733 | 0.900 | 0.810 | 0.786 | 0.938 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192-528ec248_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192_20220926.log) |
+| [pose_resnet_101_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288.py) | 384x288 | 0.749 | 0.905 | 0.818 | 0.799 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288-487d40a4_20220926.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288_20220926.log) |
+| [pose_resnet_152_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192.py) | 256x192 | 0.743 | 0.906 | 0.819 | 0.796 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192-f754df5f_20221031.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192_20221031.log) |
+| [pose_resnet_152_dark](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288.py) | 384x288 | 0.755 | 0.907 | 0.825 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288-329f8454_20221031.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288_20221031.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..02e4a7f43f61b709a6ede2f3a42ab5ac91e56cd8
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.yml
@@ -0,0 +1,100 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ - DarkPose
+ Training Data: COCO
+ Name: td-hm_res50_dark-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.724
+ AP@0.5: 0.897
+ AP@0.75: 0.797
+ AR: 0.777
+ AR@0.5: 0.934
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192-c129dcb6_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res50_dark-8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.735
+ AP@0.5: 0.902
+ AP@0.75: 0.801
+ AR: 0.786
+ AR@0.5: 0.938
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288-8b90b538_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res101_dark-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.733
+ AP@0.5: 0.9
+ AP@0.75: 0.81
+ AR: 0.786
+ AR@0.5: 0.938
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192-528ec248_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res101_dark-8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.749
+ AP@0.5: 0.905
+ AP@0.75: 0.818
+ AR: 0.799
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288-487d40a4_20220926.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res152_dark-8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.743
+ AP@0.5: 0.906
+ AP@0.75: 0.819
+ AR: 0.796
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192-f754df5f_20221031.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_res152_dark-8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.757
+ AP@0.5: 0.907
+ AP@0.75: 0.825
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288-329f8454_20221031.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_fp16_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_fp16_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..2731ca8534b509b694f6d5f6958ad6f080c171c1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnet_fp16_coco.md
@@ -0,0 +1,73 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+
+
+FP16 (ArXiv'2017)
+ +```bibtex +@article{micikevicius2017mixed, + title={Mixed precision training}, + author={Micikevicius, Paulius and Narang, Sharan and Alben, Jonah and Diamos, Gregory and Elsen, Erich and Garcia, David and Ginsburg, Boris and Houston, Michael and Kuchaiev, Oleksii and Venkatesh, Ganesh and others}, + journal={arXiv preprint arXiv:1710.03740}, + year={2017} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50_fp16](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192.py) | 256x192 | 0.716 | 0.898 | 0.798 | 0.772 | 0.937 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192-463da051_20220927.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192_20220927.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..106720153251651f5ae1a53ace2a7333c5882898
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.md
@@ -0,0 +1,45 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ResNetV1D (CVPR'2019)
+ +```bibtex +@inproceedings{he2019bag, + title={Bag of tricks for image classification with convolutional neural networks}, + author={He, Tong and Zhang, Zhi and Zhang, Hang and Zhang, Zhongyue and Xie, Junyuan and Li, Mu}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={558--567}, + year={2019} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnetv1d_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192.py) | 256x192 | 0.722 | 0.897 | 0.796 | 0.777 | 0.936 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192-27545d63_20221020.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192_20221020.log) |
+| [pose_resnetv1d_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288.py) | 384x288 | 0.730 | 0.899 | 0.800 | 0.782 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288-0646b46e_20221020.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288_20221020.log) |
+| [pose_resnetv1d_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192.py) | 256x192 | 0.732 | 0.901 | 0.808 | 0.785 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192-ee9e7212_20221021.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192_20221021.log) |
+| [pose_resnetv1d_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288.py) | 384x288 | 0.748 | 0.906 | 0.817 | 0.798 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288-d0b5875f_20221028.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288_20221028.log) |
+| [pose_resnetv1d_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192.py) | 256x192 | 0.737 | 0.904 | 0.814 | 0.790 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192-fd49f947_20221021.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192_20221021.log) |
+| [pose_resnetv1d_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288.py) | 384x288 | 0.751 | 0.907 | 0.821 | 0.801 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288-b9a99602_20221022.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288_20221022.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..765c8aaabc2fa08b5ca343a5f0bd8ac6a94c764b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.yml
@@ -0,0 +1,99 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNetV1D
+ Training Data: COCO
+ Name: td-hm_resnetv1d50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.722
+ AP@0.5: 0.897
+ AP@0.75: 0.796
+ AR: 0.777
+ AR@0.5: 0.936
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192-27545d63_20221020.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnetv1d50_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.73
+ AP@0.5: 0.899
+ AP@0.75: 0.8
+ AR: 0.782
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288-0646b46e_20221020.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnetv1d101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.732
+ AP@0.5: 0.901
+ AP@0.75: 0.808
+ AR: 0.785
+ AR@0.5: 0.940
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192-ee9e7212_20221021.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnetv1d101_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.906
+ AP@0.75: 0.817
+ AR: 0.798
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288-d0b5875f_20221028.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnetv1d152_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.904
+ AP@0.75: 0.814
+ AR: 0.790
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192-fd49f947_20221021.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnetv1d152_8xb48-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.751
+ AP@0.5: 0.907
+ AP@0.75: 0.821
+ AR: 0.801
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288-b9a99602_20221022.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..8862fddf6ca5c3ffe0c9df407787a1d7a0312c36
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.md
@@ -0,0 +1,45 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ResNext (CVPR'2017)
+ +```bibtex +@inproceedings{xie2017aggregated, + title={Aggregated residual transformations for deep neural networks}, + author={Xie, Saining and Girshick, Ross and Doll{\'a}r, Piotr and Tu, Zhuowen and He, Kaiming}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1492--1500}, + year={2017} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_resnext_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-256x192.py) | 256x192 | 0.715 | 0.897 | 0.791 | 0.771 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_256x192-dcff15f6_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_256x192_20200727.log.json) |
+| [pose_resnext_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-384x288.py) | 384x288 | 0.724 | 0.899 | 0.794 | 0.777 | 0.936 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_384x288-412c848f_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_384x288_20200727.log.json) |
+| [pose_resnext_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb64-210e_coco-256x192.py) | 256x192 | 0.726 | 0.900 | 0.801 | 0.781 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_256x192-c7eba365_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_256x192_20200727.log.json) |
+| [pose_resnext_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb32-210e_coco-384x288.py) | 384x288 | 0.744 | 0.903 | 0.815 | 0.794 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_384x288-f5eabcd6_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_384x288_20200727.log.json) |
+| [pose_resnext_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb32-210e_coco-256x192.py) | 256x192 | 0.730 | 0.903 | 0.808 | 0.785 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_256x192-102449aa_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_256x192_20200727.log.json) |
+| [pose_resnext_152](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb48-210e_coco-384x288.py) | 384x288 | 0.742 | 0.904 | 0.810 | 0.794 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_384x288-806176df_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_384x288_20200727.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1ebb616ecdcbfc4f94c2a0ded053e9ef18e66c45
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.yml
@@ -0,0 +1,99 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNext
+ Training Data: COCO
+ Name: td-hm_resnext50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.715
+ AP@0.5: 0.897
+ AP@0.75: 0.791
+ AR: 0.771
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_256x192-dcff15f6_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnext50_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.724
+ AP@0.5: 0.899
+ AP@0.75: 0.794
+ AR: 0.777
+ AR@0.5: 0.936
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext50_coco_384x288-412c848f_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnext101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.726
+ AP@0.5: 0.9
+ AP@0.75: 0.801
+ AR: 0.781
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_256x192-c7eba365_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnext101_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.744
+ AP@0.5: 0.903
+ AP@0.75: 0.815
+ AR: 0.794
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext101_coco_384x288-f5eabcd6_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnext152_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.73
+ AP@0.5: 0.903
+ AP@0.75: 0.808
+ AR: 0.785
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_256x192-102449aa_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb48-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_resnext152_8xb48-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.742
+ AP@0.5: 0.904
+ AP@0.75: 0.81
+ AR: 0.794
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_coco_384x288-806176df_20200727.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..40f570c3c142266e13024c30ebd35ca2fcc1d00f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.md
@@ -0,0 +1,44 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+RSN (ECCV'2020)
+ +```bibtex +@misc{cai2020learning, + title={Learning Delicate Local Representations for Multi-Person Pose Estimation}, + author={Yuanhao Cai and Zhicheng Wang and Zhengxiong Luo and Binyi Yin and Angang Du and Haoqian Wang and Xinyu Zhou and Erjin Zhou and Xiangyu Zhang and Jian Sun}, + year={2020}, + eprint={2003.04030}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [rsn_18](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192.py) | 256x192 | 0.704 | 0.887 | 0.781 | 0.773 | 0.927 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192-9049ed09_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192_20221013.log) |
+| [rsn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.724 | 0.894 | 0.799 | 0.790 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192-c35901d5_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192_20221013.log) |
+| [2xrsn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.748 | 0.900 | 0.821 | 0.810 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192-9ede341e_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192_20221013.log) |
+| [3xrsn_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192.py) | 256x192 | 0.750 | 0.900 | 0.824 | 0.814 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192-c3e3c4fe_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192_20221013.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2974aaf2c0d84117178ad5c017ba0acbea6b024f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.yml
@@ -0,0 +1,72 @@
+Collections:
+- Name: RSN
+ Paper:
+ Title: Learning Delicate Local Representations for Multi-Person Pose Estimation
+ URL: https://link.springer.com/chapter/10.1007/978-3-030-58580-8_27
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/rsn.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192.py
+ In Collection: RSN
+ Metadata:
+ Architecture: &id001
+ - RSN
+ Training Data: COCO
+ Name: td-hm_rsn18_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.704
+ AP@0.5: 0.887
+ AP@0.75: 0.781
+ AR: 0.773
+ AR@0.5: 0.927
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192-9049ed09_20221013.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192.py
+ In Collection: RSN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_rsn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.724
+ AP@0.5: 0.894
+ AP@0.75: 0.799
+ AR: 0.79
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192-c35901d5_20221013.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192.py
+ In Collection: RSN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_2xrsn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.9
+ AP@0.75: 0.821
+ AR: 0.81
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192-9ede341e_20221013.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192.py
+ In Collection: RSN
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_3xrsn50_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.75
+ AP@0.5: 0.9
+ AP@0.75: 0.824
+ AR: 0.814
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192-c3e3c4fe_20221013.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..5fb5833e236c1136456a0f8cf4ada0ad47b3caa9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.md
@@ -0,0 +1,43 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_scnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb64-210e_coco-256x192.py) | 256x192 | 0.728 | 0.899 | 0.807 | 0.784 | 0.938 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_256x192-6920f829_20200709.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_256x192_20200709.log.json) |
+| [pose_scnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb32-210e_coco-384x288.py) | 384x288 | 0.751 | 0.906 | 0.818 | 0.802 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_384x288-9cacd0ea_20200709.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_384x288_20200709.log.json) |
+| [pose_scnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb32-210e_coco-256x192.py) | 256x192 | 0.733 | 0.902 | 0.811 | 0.789 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_256x192-6d348ef9_20200709.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_256x192_20200709.log.json) |
+| [pose_scnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb48-210e_coco-384x288.py) | 384x288 | 0.752 | 0.906 | 0.823 | 0.804 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_384x288-0b6e631b_20200709.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_384x288_20200709.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cf68c67f90621472b71916e876d79794df3d583c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.yml
@@ -0,0 +1,66 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SCNet
+ Training Data: COCO
+ Name: td-hm_scnet50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.728
+ AP@0.5: 0.899
+ AP@0.75: 0.807
+ AR: 0.784
+ AR@0.5: 0.938
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_256x192-6920f829_20200709.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: topdown_heatmap_scnet50_coco_384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.751
+ AP@0.5: 0.906
+ AP@0.75: 0.818
+ AR: 0.802
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_coco_384x288-9cacd0ea_20200709.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_scnet101_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.733
+ AP@0.5: 0.902
+ AP@0.75: 0.811
+ AR: 0.789
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_256x192-6d348ef9_20200709.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb48-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_scnet101_8xb48-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.752
+ AP@0.5: 0.906
+ AP@0.75: 0.823
+ AR: 0.804
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_coco_384x288-0b6e631b_20200709.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..b704d9d1902f6dbdb6dd80517d4c44f35ae86097
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.md
@@ -0,0 +1,47 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SEResNet (CVPR'2018)
+ +```bibtex +@inproceedings{hu2018squeeze, + title={Squeeze-and-excitation networks}, + author={Hu, Jie and Shen, Li and Sun, Gang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={7132--7141}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_seresnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-256x192.py) | 256x192 | 0.729 | 0.903 | 0.807 | 0.784 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_256x192-25058b66_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_256x192_20200727.log.json) |
+| [pose_seresnet_50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-384x288.py) | 384x288 | 0.748 | 0.904 | 0.819 | 0.799 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_384x288-bc0b7680_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_384x288_20200727.log.json) |
+| [pose_seresnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb64-210e_coco-256x192.py) | 256x192 | 0.734 | 0.905 | 0.814 | 0.790 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_256x192-83f29c4d_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_256x192_20200727.log.json) |
+| [pose_seresnet_101](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb32-210e_coco-384x288.py) | 384x288 | 0.754 | 0.907 | 0.823 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_384x288-48de1709_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_384x288_20200727.log.json) |
+| [pose_seresnet_152\*](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb32-210e_coco-256x192.py) | 256x192 | 0.730 | 0.899 | 0.810 | 0.787 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_256x192-1c628d79_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_256x192_20200727.log.json) |
+| [pose_seresnet_152\*](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb48-210e_coco-384x288.py) | 384x288 | 0.753 | 0.906 | 0.824 | 0.806 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_384x288-58b23ee8_20200727.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_384x288_20200727.log.json) |
+
+Note that * means without imagenet pre-training.
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..945e84e223fc6ee0fa8820e331dea7df91bd8650
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.yml
@@ -0,0 +1,98 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SEResNet
+ Training Data: COCO
+ Name: td-hm_seresnet50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.729
+ AP@0.5: 0.903
+ AP@0.75: 0.807
+ AR: 0.784
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_256x192-25058b66_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_seresnet50_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.748
+ AP@0.5: 0.904
+ AP@0.75: 0.819
+ AR: 0.799
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_coco_384x288-bc0b7680_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_seresnet101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.734
+ AP@0.5: 0.905
+ AP@0.75: 0.814
+ AR: 0.79
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_256x192-83f29c4d_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_seresnet101_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.907
+ AP@0.75: 0.823
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_coco_384x288-48de1709_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_seresnet152_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.73
+ AP@0.5: 0.899
+ AP@0.75: 0.81
+ AR: 0.787
+ AR@0.5: 0.939
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_256x192-1c628d79_20200727.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb48-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_seresnet152_8xb48-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.753
+ AP@0.5: 0.906
+ AP@0.75: 0.824
+ AR: 0.806
+ AR@0.5: 0.945
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_coco_384x288-58b23ee8_20200727.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..0c8be860ab7d2a58b3ba813347d754b9f5a98268
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.md
@@ -0,0 +1,41 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ShufflenetV1 (CVPR'2018)
+ +```bibtex +@inproceedings{zhang2018shufflenet, + title={Shufflenet: An extremely efficient convolutional neural network for mobile devices}, + author={Zhang, Xiangyu and Zhou, Xinyu and Lin, Mengxiao and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={6848--6856}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_shufflenetv1](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192.py) | 256x192 | 0.587 | 0.849 | 0.654 | 0.654 | 0.896 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192-7a7ea4f4_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192_20221013.log) |
+| [pose_shufflenetv1](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288.py) | 384x288 | 0.626 | 0.862 | 0.696 | 0.687 | 0.903 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288-8342f8ba_20221013.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288_20221013.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fbdc89936d59ecdbdfbc410f4b92f00070423145
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.yml
@@ -0,0 +1,35 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ShufflenetV1
+ Training Data: COCO
+ Name: td-hm_shufflenetv1_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.587
+ AP@0.5: 0.849
+ AP@0.75: 0.654
+ AR: 0.654
+ AR@0.5: 0.896
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192-7a7ea4f4_20221013.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_shufflenetv1_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.626
+ AP@0.5: 0.862
+ AP@0.75: 0.696
+ AR: 0.687
+ AR@0.5: 0.903
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288-8342f8ba_20221013.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..f613f4fef145e8444b207a608b661b11aba31983
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.md
@@ -0,0 +1,41 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ShufflenetV2 (ECCV'2018)
+ +```bibtex +@inproceedings{ma2018shufflenet, + title={Shufflenet v2: Practical guidelines for efficient cnn architecture design}, + author={Ma, Ningning and Zhang, Xiangyu and Zheng, Hai-Tao and Sun, Jian}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={116--131}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_shufflenetv2](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192.py) | 256x192 | 0.602 | 0.857 | 0.672 | 0.668 | 0.902 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192-51fb931e_20221014.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192_20221014.log) |
+| [pose_shufflenetv2](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288.py) | 384x288 | 0.638 | 0.866 | 0.707 | 0.699 | 0.910 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288-d30ab55c_20221014.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288_20221014.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cdda3a8667ee0e22146a257dfd25c514a50dc6f2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.yml
@@ -0,0 +1,35 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ShufflenetV2
+ Training Data: COCO
+ Name: td-hm_shufflenetv2_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.602
+ AP@0.5: 0.857
+ AP@0.75: 0.672
+ AR: 0.668
+ AR@0.5: 0.902
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192-51fb931e_20221014.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_shufflenetv2_8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.638
+ AP@0.5: 0.866
+ AP@0.75: 0.707
+ AR: 0.699
+ AR@0.5: 0.91
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288-d30ab55c_20221014.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..5bcc5bd187526b01e711fe3049e3007146409cd5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.md
@@ -0,0 +1,78 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+Swin (ICCV'2021)
+ +```bibtex +@inproceedings{liu2021swin, + title={Swin transformer: Hierarchical vision transformer using shifted windows}, + author={Liu, Ze and Lin, Yutong and Cao, Yue and Hu, Han and Wei, Yixuan and Zhang, Zheng and Lin, Stephen and Guo, Baining}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={10012--10022}, + year={2021} +} +``` + +
+
+
+
+
+FPN (CVPR'2017)
+ +```bibtex +@inproceedings{lin2017feature, + title={Feature pyramid networks for object detection}, + author={Lin, Tsung-Yi and Doll{\'a}r, Piotr and Girshick, Ross and He, Kaiming and Hariharan, Bharath and Belongie, Serge}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2117--2125}, + year={2017} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_swin_t](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192.py) | 256x192 | 0.724 | 0.901 | 0.806 | 0.782 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/top_down/swin/swin_t_p4_w7_coco_256x192-eaefe010_20220503.pth) | [log](https://download.openmmlab.com/mmpose/top_down/swin/swin_t_p4_w7_coco_256x192_20220503.log.json) |
+| [pose_swin_b](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192.py) | 256x192 | 0.737 | 0.904 | 0.820 | 0.794 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_256x192-7432be9e_20220705.pth) | [log](https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_256x192_20220705.log.json) |
+| [pose_swin_b](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288.py) | 384x288 | 0.759 | 0.910 | 0.832 | 0.811 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_384x288-3abf54f9_20220705.pth) | [log](https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_384x288_20220705.log.json) |
+| [pose_swin_l](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192.py) | 256x192 | 0.743 | 0.906 | 0.821 | 0.798 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_256x192-642a89db_20220705.pth) | [log](https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_256x192_20220705.log.json) |
+| [pose_swin_l](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288.py) | 384x288 | 0.763 | 0.912 | 0.830 | 0.814 | 0.949 | [ckpt](https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_384x288-c36b7845_20220705.pth) | [log](https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_384x288_20220705.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..09ede5fa5c4ec01b77d997b4b318527fa0e27daf
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.yml
@@ -0,0 +1,99 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - Swin
+ Training Data: COCO
+ Name: td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.724
+ AP@0.5: 0.901
+ AP@0.75: 0.806
+ AR: 0.782
+ AR@0.5: 0.94
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_t_p4_w7_coco_256x192-eaefe010_20220503.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.904
+ AP@0.75: 0.82
+ AR: 0.794
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_256x192-7432be9e_20220705.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.759
+ AP@0.5: 0.91
+ AP@0.75: 0.832
+ AR: 0.811
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_coco_384x288-3abf54f9_20220705.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.743
+ AP@0.5: 0.906
+ AP@0.75: 0.821
+ AR: 0.798
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_256x192-642a89db_20220705.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.763
+ AP@0.5: 0.912
+ AP@0.75: 0.83
+ AR: 0.814
+ AR@0.5: 0.949
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_l_p4_w7_coco_384x288-c36b7845_20220705.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/coco/swin_b_p4_w7_fpn_coco_256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: topdown_heatmap_swin_b_p4_w7_fpn_coco_256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.741
+ AP@0.5: 0.907
+ AP@0.75: 0.821
+ AR: 0.798
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/swin/swin_b_p4_w7_fpn_coco_256x192-a3b91c45_20220705.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm-vis_res50_8xb64-210e_coco-aic-256x192-merge.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm-vis_res50_8xb64-210e_coco-aic-256x192-merge.py
new file mode 100644
index 0000000000000000000000000000000000000000..f5def39ed911b661b0a651a4c0b132b66bab934d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm-vis_res50_8xb64-210e_coco-aic-256x192-merge.py
@@ -0,0 +1,167 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='VisPredictHead',
+ loss=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ use_sigmoid=True,
+ loss_weight=1e-3,
+ ),
+ pose_cfg=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec)),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root='data/aic/',
+ data_mode=data_mode,
+ ann_file='annotations/aic_train.json',
+ data_prefix=dict(img='ai_challenger_keypoint_train_20170902/'
+ 'keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ ])
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ # score_mode='bbox',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xmspn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xmspn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7af125c24d81c4bfa81cdafa3cb95f9729511b66
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xmspn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,152 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [15, 11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MSPN',
+ unit_channels=256,
+ num_stages=2,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ norm_cfg=dict(type='BN'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=2,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3] + [1, 2, 3, 4],
+ loss=([
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ]) * 2,
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..0680f6995eee3dc9a345eab0353f5dc65c023f0f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_2xrsn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [15, 11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='RSN',
+ unit_channels=256,
+ num_stages=2,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ num_steps=4,
+ norm_cfg=dict(type='BN'),
+ ),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=2,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3] + [1, 2, 3, 4],
+ loss=([
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ]) * 2,
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xmspn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xmspn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..41162f01e5ac5c63977c11ea70b49372ef2b8476
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xmspn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,152 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [15, 11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MSPN',
+ unit_channels=256,
+ num_stages=3,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ norm_cfg=dict(type='BN'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=3,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3] * 2 + [1, 2, 3, 4],
+ loss=([
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ]) * 3,
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..99326451c6d05162bc3df0c8d71e8305baf574fd
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_3xrsn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [15, 11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='RSN',
+ unit_channels=256,
+ num_stages=3,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ num_steps=4,
+ norm_cfg=dict(type='BN'),
+ ),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=3,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3] * 2 + [1, 2, 3, 4],
+ loss=([
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ]) * 3,
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_4xmspn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_4xmspn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..999245e74dfc87985e34e3122979fe02486c5b4f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_4xmspn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,152 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [15, 11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MSPN',
+ unit_channels=256,
+ num_stages=4,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ norm_cfg=dict(type='BN'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=4,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3] * 3 + [1, 2, 3, 4],
+ loss=([
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ]) * 4,
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..5a557805052048f2ccbb6c6dc89fc3e578922a36
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192.py
@@ -0,0 +1,153 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.75,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='base',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.3,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_base_20230913.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', scale_factor=4.0, apply_relu=True),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ deconv_out_channels=[],
+ deconv_kernel_sizes=[],
+ final_layer=dict(kernel_size=3, padding=1),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..06522b7b911370b214cb0917f00b327c500194aa
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.75,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='base',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.3,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_base_20230913.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..03ae669807ff5849aec01c37633669be790555e6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192.py
@@ -0,0 +1,153 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=32,
+ layer_decay_rate=0.85,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='huge',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.55,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_huge_20230913.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', scale_factor=4.0, apply_relu=True),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=17,
+ deconv_out_channels=[],
+ deconv_kernel_sizes=[],
+ final_layer=dict(kernel_size=3, padding=1),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b8afcf0f4ba2cd9a60c760db428168b556f882d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=32,
+ layer_decay_rate=0.85,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='huge',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.55,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_huge_20230913.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..2035e786dfe538f85b4cdcb19ed44dc11b4ba8f9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192.py
@@ -0,0 +1,153 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=24,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='large',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.5,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_large_20230913.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', scale_factor=4.0, apply_relu=True),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ deconv_out_channels=[],
+ deconv_kernel_sizes=[],
+ final_layer=dict(kernel_size=3, padding=1),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f1d0e90578cb654283de23e77f2353e94d0b0e42
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=24,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='large',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.5,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_large_20230913.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d8216089b79d8d97f59e592a04ab4fac5c448587
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch={
+ 'embed_dims': 384,
+ 'num_layers': 12,
+ 'num_heads': 12,
+ 'feedforward_channels': 384 * 4
+ },
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.1,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_small_20230913.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', scale_factor=4.0, apply_relu=True),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=384,
+ out_channels=17,
+ deconv_out_channels=[],
+ deconv_kernel_sizes=[],
+ final_layer=dict(kernel_size=3, padding=1),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..5b77da96eba1e1fa83c93a5010609ec5cced0a5b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch={
+ 'embed_dims': 384,
+ 'num_layers': 12,
+ 'num_heads': 12,
+ 'feedforward_channels': 384 * 4
+ },
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.1,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_small_20230913.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=384,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_alexnet_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_alexnet_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4051f4c5ec52fe170d5a6a050e867fe5ebb255a3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_alexnet_8xb64-210e_coco-256x192.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(40, 56), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='AlexNet', num_classes=-1),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=256,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..38b23cf7182c45a507b87c4a372fd2e174e32eb1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb32-210e_coco-384x288.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(36, 48), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=17,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=17,
+ out_channels=17,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..17f7eb9677fbf0d285628e059835a45f443caeef
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_cpm_8xb64-210e_coco-256x192.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(24, 32), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=17,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=17,
+ out_channels=17,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..b9d49c8e6a7df8160db26ff6a0cbabe20b6f4a4a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=17,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-384x384.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-384x384.py
new file mode 100644
index 0000000000000000000000000000000000000000..d9932ff9e3773a591650ee94a95da2784bf562eb
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hourglass52_8xb32-210e_coco-384x384.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(384, 384), heatmap_size=(96, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=17,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8b81dbdaac0c4df6eed9f287379b25e81ab6ce7d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-256x192.py
@@ -0,0 +1,174 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={'relative_position_bias_table': dict(decay_mult=0.)}))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRFormer',
+ in_channels=3,
+ norm_cfg=norm_cfg,
+ extra=dict(
+ drop_path_rate=0.2,
+ with_rpe=True,
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(2, ),
+ num_channels=(64, ),
+ num_heads=[2],
+ mlp_ratios=[4]),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2),
+ num_channels=(78, 156),
+ num_heads=[2, 4],
+ mlp_ratios=[4, 4],
+ window_sizes=[7, 7]),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2),
+ num_channels=(78, 156, 312),
+ num_heads=[2, 4, 8],
+ mlp_ratios=[4, 4, 4],
+ window_sizes=[7, 7, 7]),
+ stage4=dict(
+ num_modules=2,
+ num_branches=4,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2, 2),
+ num_channels=(78, 156, 312, 624),
+ num_heads=[2, 4, 8, 16],
+ mlp_ratios=[4, 4, 4, 4],
+ window_sizes=[7, 7, 7, 7])),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrformer_base-32815020_20220226.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=78,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..351685464c9560dd748da728372dbcf46a8dfc70
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-base_8xb32-210e_coco-384x288.py
@@ -0,0 +1,174 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={'relative_position_bias_table': dict(decay_mult=0.)}))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRFormer',
+ in_channels=3,
+ norm_cfg=norm_cfg,
+ extra=dict(
+ drop_path_rate=0.2,
+ with_rpe=True,
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(2, ),
+ num_channels=(64, ),
+ num_heads=[2],
+ mlp_ratios=[4]),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2),
+ num_channels=(78, 156),
+ num_heads=[2, 4],
+ mlp_ratios=[4, 4],
+ window_sizes=[7, 7]),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2),
+ num_channels=(78, 156, 312),
+ num_heads=[2, 4, 8],
+ mlp_ratios=[4, 4, 4],
+ window_sizes=[7, 7, 7]),
+ stage4=dict(
+ num_modules=2,
+ num_branches=4,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2, 2),
+ num_channels=(78, 156, 312, 624),
+ num_heads=[2, 4, 8, 16],
+ mlp_ratios=[4, 4, 4, 4],
+ window_sizes=[7, 7, 7, 7])),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrformer_base-32815020_20220226.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=78,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c59395c8ad5365285c3a26d9fbeb3855b050433
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-256x192.py
@@ -0,0 +1,174 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={'relative_position_bias_table': dict(decay_mult=0.)}))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRFormer',
+ in_channels=3,
+ norm_cfg=norm_cfg,
+ extra=dict(
+ drop_path_rate=0.1,
+ with_rpe=True,
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(2, ),
+ num_channels=(64, ),
+ num_heads=[2],
+ num_mlp_ratios=[4]),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2),
+ num_channels=(32, 64),
+ num_heads=[1, 2],
+ mlp_ratios=[4, 4],
+ window_sizes=[7, 7]),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2),
+ num_channels=(32, 64, 128),
+ num_heads=[1, 2, 4],
+ mlp_ratios=[4, 4, 4],
+ window_sizes=[7, 7, 7]),
+ stage4=dict(
+ num_modules=2,
+ num_branches=4,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2, 2),
+ num_channels=(32, 64, 128, 256),
+ num_heads=[1, 2, 4, 8],
+ mlp_ratios=[4, 4, 4, 4],
+ window_sizes=[7, 7, 7, 7])),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrformer_small-09516375_20220226.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..eee3521a7c617e30efa16224520bda00fe2e64e7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrformer-small_8xb32-210e_coco-384x288.py
@@ -0,0 +1,174 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={'relative_position_bias_table': dict(decay_mult=0.)}))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRFormer',
+ in_channels=3,
+ norm_cfg=norm_cfg,
+ extra=dict(
+ drop_path_rate=0.1,
+ with_rpe=True,
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(2, ),
+ num_channels=(64, ),
+ num_heads=[2],
+ num_mlp_ratios=[4]),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2),
+ num_channels=(32, 64),
+ num_heads=[1, 2],
+ mlp_ratios=[4, 4],
+ window_sizes=[7, 7]),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2),
+ num_channels=(32, 64, 128),
+ num_heads=[1, 2, 4],
+ mlp_ratios=[4, 4, 4],
+ window_sizes=[7, 7, 7]),
+ stage4=dict(
+ num_modules=2,
+ num_branches=4,
+ block='HRFORMERBLOCK',
+ num_blocks=(2, 2, 2, 2),
+ num_channels=(32, 64, 128, 256),
+ num_heads=[1, 2, 4, 8],
+ mlp_ratios=[4, 4, 4, 4],
+ window_sizes=[7, 7, 7, 7])),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrformer_small-09516375_20220226.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea486d830a5d397f0e65958c832933a3de6fee6d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..ae15d35ee11973169434b0b6d6b03ec46c9530a4
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py
new file mode 100644
index 0000000000000000000000000000000000000000..f5d2ed0bfd422568e71aca13c7be56217dd5d381
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py
@@ -0,0 +1,221 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=3))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# keypoint mappings
+keypoint_mapping_coco = [
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+]
+
+keypoint_mapping_aic = [
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ (12, 17),
+ (13, 18),
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=19,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ output_keypoint_indices=[
+ target for _, target in keypoint_mapping_coco
+ ]))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_coco)
+ ],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root='data/aic/',
+ data_mode=data_mode,
+ ann_file='annotations/aic_train.json',
+ data_prefix=dict(img='ai_challenger_keypoint_train_20170902/'
+ 'keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=19,
+ mapping=keypoint_mapping_aic)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py
new file mode 100644
index 0000000000000000000000000000000000000000..847a40da2f08516a24e8bb765aac454a5cf0dc5f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py
@@ -0,0 +1,187 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[],
+)
+
+dataset_aic = dict(
+ type='AicDataset',
+ data_root='data/aic/',
+ data_mode=data_mode,
+ ann_file='annotations/aic_train.json',
+ data_prefix=dict(img='ai_challenger_keypoint_train_20170902/'
+ 'keypoint_train_images_20170902/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=17,
+ mapping=[
+ (0, 6),
+ (1, 8),
+ (2, 10),
+ (3, 5),
+ (4, 7),
+ (5, 9),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 11),
+ (10, 13),
+ (11, 15),
+ ])
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[dataset_coco, dataset_aic],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..a3ac0bd58901ec998641eec822561abb97779fc0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_coarsedropout-8xb64-210e_coco-256x192.py
@@ -0,0 +1,165 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'body_2d_keypoint/topdown_heatmap/coco/'
+ 'td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(
+ type='CoarseDropout',
+ max_holes=8,
+ max_height=40,
+ max_width=40,
+ min_holes=1,
+ min_height=10,
+ min_width=10,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7273a0503bd7e67505820de75a4be106922f43f0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..67b13b8babfe0ac672902f42212b66c5254433a2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_dark-8xb64-210e_coco-384x288.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..306d0aeb44b8014c3fa31743ff92b55b3b417927
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_fp16-8xb64-210e_coco-256x192.py
@@ -0,0 +1,7 @@
+_base_ = ['./td-hm_hrnet-w32_8xb64-210e_coco-256x192.py']
+
+# fp16 settings
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ loss_scale='dynamic',
+)
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d380ad243db94d0ef80a55cee830fe28954c3b0e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_gridmask-8xb64-210e_coco-256x192.py
@@ -0,0 +1,162 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'body_2d_keypoint/topdown_heatmap/coco/'
+ 'td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(
+ type='GridDropout',
+ unit_size_min=10,
+ unit_size_max=40,
+ random_offset=True,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f0bc7486ca27f2e58a41077527de9add9d9600b3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_photometric-8xb64-210e_coco-256x192.py
@@ -0,0 +1,153 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/'
+ 'body_2d_keypoint/topdown_heatmap/coco/'
+ 'td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PhotometricDistortion'),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..143a686ef7536a6cfccdbdf431de9188062caa3e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..113a91e18ce1fd3a934199f872ee6989c1e7cf95
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-8xb64-210e_coco-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d147de838a2fce6b0293ede36ecac81b51942036
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_udp-regress-8xb64-210e_coco-256x192.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ heatmap_type='combined')
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=3 * 17,
+ deconv_out_channels=None,
+ loss=dict(type='CombinedTargetMSELoss', use_target_weight=True),
+ decoder=codec),
+ train_cfg=dict(compute_acc=False),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='udp_combined',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..1c5ff70ab47a0cf027c04983e6c1f3640ba56802
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..f83b7d31a43bd0d84d55fbc2825438efa607fff0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..daf3cbaddc15d9ded726a3ce7183f2364ddb74c6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..eec52999c960c693c92b472cbff1d89d752dd2f1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_dark-8xb32-210e_coco-384x288.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b705cb7fb3b59f158be04b4496e2a49922213f4f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..cfa17ef098e5b471aba21b9d1a53dc154d8125cb
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..caa7c267a09ea1080980dfeba1f26c22b9655169
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb32-210e_coco-384x288.py
@@ -0,0 +1,140 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(2, 4, 2),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f5a564d115bf7c94b6706ce337acbbccd94fb34
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-18_8xb64-210e_coco-256x192.py
@@ -0,0 +1,140 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(2, 4, 2),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..663593552563dbe296ac3c780fda650dd8298c41
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb32-210e_coco-384x288.py
@@ -0,0 +1,140 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(3, 8, 3),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b5d347cd9537af2a690ee3c6d02323a8c53bbd8
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_litehrnet-30_8xb64-210e_coco-256x192.py
@@ -0,0 +1,140 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(3, 8, 3),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ff8eaccb7e093a16416ea52983d6cb7feb6d7814
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-256x192.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='mmcls://mobilenet_v2',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..d01e4c6c3dc9924079d35bde2445fb93b3541cba
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mobilenetv2_8xb64-210e_coco-384x288.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='mmcls://mobilenet_v2',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mspn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mspn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d0e2e9893c6429c99b847747170690654411e68b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_mspn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,152 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MSPN',
+ unit_channels=256,
+ num_stages=1,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ norm_cfg=dict(type='BN'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=1,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3],
+ loss=[
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ],
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvt-s_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvt-s_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..1b474b3f2fe7a5db3571846f7ab54c5c05c33136
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvt-s_8xb64-210e_coco-256x192.py
@@ -0,0 +1,127 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='PyramidVisionTransformer',
+ num_layers=[3, 4, 6, 3],
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_small.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', select_index=3),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=512,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvtv2-b2_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvtv2-b2_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e8921e68030e89110afe8c44717b051b02616a13
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_pvtv2-b2_8xb64-210e_coco-256x192.py
@@ -0,0 +1,128 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='PyramidVisionTransformerV2',
+ embed_dims=64,
+ num_layers=[3, 4, 6, 3],
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b2.pth'),
+ ),
+ neck=dict(type='FeatureMapProcessor', select_index=3),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=512,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..cd13e4a4222f21baa200c4c8ccb17986aacfc935
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb32-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..5486548481df742e6bc53bd32d65501971e356f5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..39b7b3220d64d2ac905288c6bf2c0dd1ca2be7f1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-256x192.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..f7c99503d46a7e0dc4402250e073b6ce9128d121
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res101_dark-8xb64-210e_coco-384x288.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..beccab1bd105b618b601d5d331cc0fc680df1bf7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..25d5039f05e3d9b2387be6bc0690e5d3904faded
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_8xb32-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..acd91192447b4ef5f41745db0c4b93357b53b778
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-256x192.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..49bd2b224bea33419d392931391ba90806ee24a7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res152_dark-8xb32-210e_coco-384x288.py
@@ -0,0 +1,126 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True,
+ blur_kernel_size=17)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7dbe1b43f77f35fb6564b9d6322a1b8c08d93a60
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..d74cc1392d27911a1e3d2b3239840717da5a4fb5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..fdec305b10c5aaa202957650a81975158d0d1b9c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-256x192.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..b34ad210f37ce883b21377192fbe035a7c1fcd56
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_dark-8xb64-210e_coco-384x288.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..66a6a27822fb72e7aef421bf1bf2230598c26125
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_fp16-8xb64-210e_coco-256x192.py
@@ -0,0 +1,7 @@
+_base_ = ['./td-hm_res50_8xb64-210e_coco-256x192.py']
+
+# fp16 settings
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ loss_scale='dynamic',
+)
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..5bfbace9f6313fe89201ba5c243e51b4aa90ca27
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb32-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..030ae95d634e40f172dae07eb2bef163084906a3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb16-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb16-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..bdcdb6c75fb74e65ca53797eb33039f6d36357ce
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb16-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=128)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=200,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest200'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..1a5e1e8e4a570e09b9fd3a5f096584275bfb8858
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest200_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=200,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest200'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb16-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb16-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..b519e9d2ef951298da6f3d4794d5c8660e83159d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb16-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=128)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=269,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest269'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b3588d1fa31e29ec960a35050ff8659e712712ec
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest269_8xb32-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=269,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest269'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..43295bb41f1b4b2c87119baec30b7efc9ecb80d9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..e45320b036372894e9ddd0bcee6c457e86a8ecee
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnest50_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnest50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..4fc55228face0a1586627e3ffa823ffe645c812a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb32-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet101_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c8cc4e808c2fff488bc4b5c977a34d7978a6d03
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet101_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..a85a7f80c43b090426182ab9c3acaa5659b0f4d5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb32-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet152_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..7a728ce806415f8da3afd036835171b64976a41a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d152_8xb48-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=384)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet152_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=48,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..c241cdd3ddbee8398c3da8d96d7d3d46bce99f24
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet50_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d1cea135b49cf1d70e10194685c394dc2c8bc1a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnetv1d50_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet50_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..508233371b4a819fe0b14a01798cfe48e6b32303
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb32-210e_coco-384x288.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='mmcls://resnext101_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..eafed7f07526dce3b46bcd800272764a1614a051
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='mmcls://resnext101_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..27c2c263b05193b10f0c0af2235b81d86cca1bc4
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb32-210e_coco-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=152,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='mmcls://resnext152_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb48-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb48-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..c02caeb7461f1fb312d02cfe7496c57a8b9b11e2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext152_8xb48-210e_coco-384x288.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=384)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=152,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='mmcls://resnext152_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=48,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b088a44ca6a043abac5e52596486362124d244c5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnext50_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..9f97235218992e772298fcb74c1494331eeb50a7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_resnext50_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnext50_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..18d16bd26784ad9f706e39bd83c25fc913ef4b08
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn18_8xb32-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-2,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 190, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='RSN',
+ unit_channels=256,
+ num_stages=1,
+ num_units=4,
+ num_blocks=[2, 2, 2, 2],
+ num_steps=4,
+ norm_cfg=dict(type='BN'),
+ ),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=1,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3],
+ loss=[
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ],
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..069cb413123be20dee06dd8014b583dfa267fa46
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_rsn50_8xb32-210e_coco-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+# multiple kernel_sizes of heatmap gaussian for 'Megvii' approach.
+kernel_sizes = [11, 9, 7, 5]
+codec = [
+ dict(
+ type='MegviiHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ kernel_size=kernel_size) for kernel_size in kernel_sizes
+]
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='RSN',
+ unit_channels=256,
+ num_stages=1,
+ num_units=4,
+ num_blocks=[3, 4, 6, 3],
+ num_steps=4,
+ norm_cfg=dict(type='BN'),
+ ),
+ head=dict(
+ type='MSPNHead',
+ out_shape=(64, 48),
+ unit_channels=256,
+ out_channels=17,
+ num_stages=1,
+ num_units=4,
+ norm_cfg=dict(type='BN'),
+ # each sub list is for a stage
+ # and each element in each list is for a unit
+ level_indices=[0, 1, 2, 3],
+ loss=[
+ dict(
+ type='KeypointMSELoss',
+ use_target_weight=True,
+ loss_weight=0.25)
+ ] * 3 + [
+ dict(
+ type='KeypointOHKMMSELoss',
+ use_target_weight=True,
+ loss_weight=1.)
+ ],
+ decoder=codec[-1]),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='GenerateTarget', multilevel=True, encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec[0]['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json',
+ nms_mode='none')
+test_evaluator = val_evaluator
+
+# fp16 settings
+fp16 = dict(loss_scale='dynamic')
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..544c87242f5f3e7e4a0b129aa927e21a8c5a4430
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb32-210e_coco-256x192.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet101-94250a77.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=1,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb48-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb48-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..1af2e44ef013ea525d0d7cfe19312c07a1b5ae93
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet101_8xb48-210e_coco-384x288.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet101-94250a77.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=48,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..efa1ad924cf5da56fc0ab69cee89eee48355376d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb32-210e_coco-384x288.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet50-7ef0a199.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=1,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..9d784d80296e085f201da67e7f45732af6fe8938
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_scnet50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet50-7ef0a199.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..b515b744c4c9b43126b2e85b9c32b5663016be70
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb32-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f6d9fab2eda60ecef464a645b572866d1954cbcf
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..a0ef9bf5711f01625f3faf0d46122dae2eca8c35
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb32-210e_coco-256x192.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=152,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb48-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb48-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..13524c121772b7a73b79dd7d9c2fd4fd6e5ad882
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet152_8xb48-210e_coco-384x288.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=384)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=152,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=48,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..93fb78fac56a697164a383229436c79de5392be5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..fa2002a70a94d7104d07ec2c921a6c1123f859ab
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_seresnet50_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..029f48d3d90bdc113066c67200cbe15772bd0b9b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV1',
+ groups=3,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v1'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=960,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..f06c325bd1213995bb51bd9c1e477de0604e4cb7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv1_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV1',
+ groups=3,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v1'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=960,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..333998490e38105e4f73a55af6358e868943117a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV2',
+ widen_factor=1.0,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v2'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..e7be5484e8d56f6001a3c1e5de91dd1b8c32821f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_shufflenetv2_8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV2',
+ widen_factor=1.0,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v2'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..81877b893f69b66a2263a4d5dfea8407d56668af
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-256x192.py
@@ -0,0 +1,139 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(3, ),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/SwinTransformer/storage/releases/'
+ 'download/v1.0.0/swin_base_patch4_window7_224_22k.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..0c1d5fa12f97259031d65030e5abee8cb61d372d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-b-p4-w7_8xb32-210e_coco-384x288.py
@@ -0,0 +1,139 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(3, ),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/SwinTransformer/storage/releases/'
+ 'download/v1.0.0/swin_base_patch4_window12_384_22k.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..14d08a49f865a901b0832f40dd2819b8ee43d58c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-256x192.py
@@ -0,0 +1,148 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'relative_position_bias_table': dict(decay_mult=0.),
+ 'norm': dict(decay_mult=0.)
+ }))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.5,
+ patch_norm=True,
+ out_indices=(3, ),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/SwinTransformer/storage/releases/'
+ 'download/v1.0.0/swin_base_patch4_window7_224_22k.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1536,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..692c8df1a616dabbcb93a9be67f4626862eae172
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-l-p4-w7_8xb32-210e_coco-384x288.py
@@ -0,0 +1,148 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW',
+ lr=5e-4,
+ betas=(0.9, 0.999),
+ weight_decay=0.01,
+ ),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'relative_position_bias_table': dict(decay_mult=0.),
+ 'norm': dict(decay_mult=0.)
+ }))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.5,
+ patch_norm=True,
+ out_indices=(3, ),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/SwinTransformer/storage/releases/'
+ 'download/v1.0.0/swin_base_patch4_window12_384_22k.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1536,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..068ee0649f4cf97f5887ff5b17f44d6e1e1609b3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_swin-t-p4-w7_8xb32-210e_coco-256x192.py
@@ -0,0 +1,139 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(3, ),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://github.com/SwinTransformer/storage/releases/'
+ 'download/v1.0.0/swin_tiny_patch4_window7_224.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vgg16-bn_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vgg16-bn_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b85adb998bb5f2660ef00d1d395a6ca8bb4763c0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vgg16-bn_8xb64-210e_coco-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='VGG',
+ depth=16,
+ norm_cfg=dict(type='BN'),
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://vgg16_bn'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=512,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..04fcc1ad2ef3152e217fa20bc0a325d44b1e6f0d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ViPNAS_MobileNetV3'),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=160,
+ out_channels=17,
+ deconv_out_channels=(160, 160, 160),
+ deconv_num_groups=(160, 160, 160),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8190d7ffd2ca650f939935487551f0a62a8bf078
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ViPNAS_ResNet', depth=50),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=608,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..a2c19453f3e3e1be0490c6e55becd2ba4ae14f04
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.md
@@ -0,0 +1,39 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+VGG (ICLR'2015)
+ +```bibtex +@article{simonyan2014very, + title={Very deep convolutional networks for large-scale image recognition}, + author={Simonyan, Karen and Zisserman, Andrew}, + journal={arXiv preprint arXiv:1409.1556}, + year={2014} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [vgg](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vgg16-bn_8xb64-210e_coco-256x192.py) | 256x192 | 0.699 | 0.890 | 0.769 | 0.754 | 0.927 | [ckpt](https://download.openmmlab.com/mmpose/top_down/vgg/vgg16_bn_coco_256x192-7e7c58d6_20210517.pth) | [log](https://download.openmmlab.com/mmpose/top_down/vgg/vgg16_bn_coco_256x192_20210517.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..166fa05fcddc05ffe60a996ec63bb747d58ea7dd
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vgg16-bn_8xb64-210e_coco-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - VGG
+ Training Data: COCO
+ Name: td-hm_vgg16-bn_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.699
+ AP@0.5: 0.89
+ AP@0.75: 0.769
+ AR: 0.754
+ AR@0.5: 0.927
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/vgg/vgg16_bn_coco_256x192-7e7c58d6_20210517.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..b6a178865bd6844c0f73fbe7db43aa4be795dc71
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.md
@@ -0,0 +1,40 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [S-ViPNAS-MobileNetV3](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192.py) | 256x192 | 0.700 | 0.887 | 0.783 | 0.758 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192-e0987441_20221010.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192_20221010.log) |
+| [S-ViPNAS-Res50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192.py) | 256x192 | 0.711 | 0.894 | 0.787 | 0.769 | 0.934 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192-35d4bff9_20220917.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192_20220917.log) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cbdaa5bcabf800b60b14a044e5de0e71f753017a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.yml
@@ -0,0 +1,40 @@
+Collections:
+- Name: ViPNAS
+ Paper:
+ Title: 'ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search'
+ URL: https://arxiv.org/abs/2105.10154
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/vipnas.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: &id001
+ - ViPNAS
+ Training Data: COCO
+ Name: td-hm_vipnas-mbv3_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.7
+ AP@0.5: 0.887
+ AP@0.75: 0.783
+ AR: 0.758
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ Weights: (https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-mbv3_8xb64-210e_coco-256x192-e0987441_20221010.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-hm_vipnas-res50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.711
+ AP@0.5: 0.894
+ AP@0.75: 0.787
+ AR: 0.769
+ AR@0.5: 0.934
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_vipnas-res50_8xb64-210e_coco-256x192-35d4bff9_20220917.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.md b/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..054a7b0f6ffe7e3167010cf1485d53e300a3ca97
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.md
@@ -0,0 +1,61 @@
+To utilize ViTPose, you'll need to have [MMPreTrain](https://github.com/open-mmlab/mmpretrain). To install the required version, run the following command:
+
+```shell
+mim install 'mmpretrain>=1.0.0'
+```
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+ViTPose (NeurIPS'2022)
+ +```bibtex +@inproceedings{ + xu2022vitpose, + title={Vi{TP}ose: Simple Vision Transformer Baselines for Human Pose Estimation}, + author={Yufei Xu and Jing Zhang and Qiming Zhang and Dacheng Tao}, + booktitle={Advances in Neural Information Processing Systems}, + year={2022}, +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ViTPose-S](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py) | 256x192 | 0.739 | 0.903 | 0.816 | 0.792 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.json) |
+| [ViTPose-B](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.757 | 0.905 | 0.829 | 0.810 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.json) |
+| [ViTPose-L](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py) | 256x192 | 0.782 | 0.914 | 0.850 | 0.834 | 0.952 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.json) |
+| [ViTPose-H](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py) | 256x192 | 0.788 | 0.917 | 0.855 | 0.839 | 0.954 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.json) |
+| [ViTPose-H\*](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py) | 256x192 | 0.790 | 0.916 | 0.857 | 0.840 | 0.953 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_3rdparty_coco-256x192-5b738c8e_20230314.pth) | - |
+
+*Models with * are converted from the [official repo](https://github.com/ViTAE-Transformer/ViTPose). The config files of these models are only for validation.*
+
+> With simple decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ViTPose-S](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192.py) | 256x192 | 0.736 | 0.900 | 0.811 | 0.790 | 0.940 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192-4c101a76_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192-4c101a76_20230314.json) |
+| [ViTPose-B](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192.py) | 256x192 | 0.756 | 0.906 | 0.826 | 0.809 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192-0b8234ea_20230407.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192-0b8234ea_20230407.json) |
+| [ViTPose-L](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192.py) | 256x192 | 0.780 | 0.914 | 0.851 | 0.833 | 0.952 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192-3a7ee9e1_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192-3a7ee9e1_20230314.json) |
+| [ViTPose-H](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192.py) | 256x192 | 0.789 | 0.916 | 0.856 | 0.839 | 0.953 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192-ffd48c05_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192-ffd48c05_20230314.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.yml b/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..10cc7bf972d6c3e76d5f084e8187c97fdf529cb9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.yml
@@ -0,0 +1,155 @@
+Collections:
+- Name: ViTPose
+ Paper:
+ Title: 'ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation'
+ URL: https://arxiv.org/abs/2204.12484
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/vitpose.md
+ Metadata:
+ Training Resources: 8x A100 GPUs
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: &id001
+ - ViTPose
+ - Classic Head
+ Model Size: Small
+ Training Data: COCO
+ Name: td-hm_ViTPose-small_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.739
+ AP@0.5: 0.903
+ AP@0.75: 0.816
+ AR: 0.792
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Base
+ Training Data: COCO
+ Name: td-hm_ViTPose-base_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.757
+ AP@0.5: 0.905
+ AP@0.75: 0.829
+ AR: 0.81
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Large
+ Training Data: COCO
+ Name: td-hm_ViTPose-large_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.782
+ AP@0.5: 0.914
+ AP@0.75: 0.850
+ AR: 0.834
+ AR@0.5: 0.952
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Huge
+ Training Data: COCO
+ Name: td-hm_ViTPose-huge_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.788
+ AP@0.5: 0.917
+ AP@0.75: 0.855
+ AR: 0.839
+ AR@0.5: 0.954
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Alias: vitpose-s
+ Metadata:
+ Architecture: &id002
+ - ViTPose
+ - Simple Head
+ Model Size: Small
+ Training Data: COCO
+ Name: td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.736
+ AP@0.5: 0.900
+ AP@0.75: 0.811
+ AR: 0.790
+ AR@0.5: 0.940
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192-4c101a76_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Alias:
+ - vitpose
+ - vitpose-b
+ Metadata:
+ Architecture: *id002
+ Model Size: Base
+ Training Data: COCO
+ Name: td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.756
+ AP@0.5: 0.906
+ AP@0.75: 0.826
+ AR: 0.809
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192-0b8234ea_20230407.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Alias: vitpose-l
+ Metadata:
+ Architecture: *id002
+ Model Size: Large
+ Training Data: COCO
+ Name: td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.780
+ AP@0.5: 0.914
+ AP@0.75: 0.851
+ AR: 0.833
+ AR@0.5: 0.952
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192-3a7ee9e1_20230314.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192.py
+ In Collection: ViTPose
+ Alias: vitpose-h
+ Metadata:
+ Architecture: *id002
+ Model Size: Huge
+ Training Data: COCO
+ Name: td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.789
+ AP@0.5: 0.916
+ AP@0.75: 0.856
+ AR: 0.839
+ AR@0.5: 0.953
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192-ffd48c05_20230314.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext-m_udp_8xb64-210e_crowpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext-m_udp_8xb64-210e_crowpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..b083719303620be25ca2f2aa587ae85f15d6c613
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext-m_udp_8xb64-210e_crowpose-256x192.py
@@ -0,0 +1,216 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/',
+# f'{data_root}': 's3://openmmlab/datasets/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='crowdpose/annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='pose/CrowdPose/images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='crowdpose/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'crowdpose/annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.md b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..24c35348389b3f532fffa418a21b6edce6d21cb0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.md
@@ -0,0 +1,56 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [pose_cspnext_m](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext-m_udp_8xb64-210e_crowpose-256x192.py) | 256x192 | 0.662 | 0.821 | 0.723 | 0.759 | 0.675 | 0.539 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-crowdpose_pt-in1k_210e-256x192-f591079f_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-crowdpose_pt-in1k_210e-256x192-f591079f_20230123.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.yml b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6e5b4cd691ccb083db97b33b3531b0e69f39af12
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.yml
@@ -0,0 +1,20 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext-m_udp_8xb64-210e_crowpose-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture:
+ - UDP
+ - CSPNeXt
+ Training Data: CrowdPose
+ Name: cspnext-m_udp_8xb64-210e_crowpose-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.662
+ AP (E): 0.759
+ AP (H): 0.539
+ AP (M): 0.675
+ AP@0.5: 0.821
+ AP@0.75: 0.723
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-crowdpose_pt-in1k_210e-256x192-f591079f_20230123.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.md b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..c0d24d47175d592b536d905881df852959406eed
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.md
@@ -0,0 +1,38 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192.py) | 256x192 | 0.675 | 0.825 | 0.729 | 0.770 | 0.687 | 0.553 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_crowdpose_256x192-960be101_20201227.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_crowdpose_256x192_20201227.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.yml b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c37fa9154feab028c1dd3d3511fccabcc2805042
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.yml
@@ -0,0 +1,19 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture:
+ - HRNet
+ Training Data: CrowdPose
+ Name: td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.675
+ AP (E): 0.77
+ AP (H): 0.553
+ AP (M): 0.687
+ AP@0.5: 0.825
+ AP@0.75: 0.729
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_crowdpose_256x192-960be101_20201227.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.md b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..56a771806d361061652b57e624b13169db1bb410
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.md
@@ -0,0 +1,58 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on CrowdPose test with [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) human detector
+
+| Arch | Input Size | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | ckpt | log |
+| :--------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :--------------------------------------------: | :-------------------------------------------: |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res50_8xb64-210e_crowdpose-256x192.py) | 256x192 | 0.637 | 0.808 | 0.692 | 0.738 | 0.650 | 0.506 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_crowdpose_256x192-c6a526b6_20201227.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_crowdpose_256x192_20201227.log.json) |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-256x192.py) | 256x192 | 0.647 | 0.810 | 0.703 | 0.745 | 0.658 | 0.521 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_256x192-8f5870f4_20201227.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_256x192_20201227.log.json) |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-320x256.py) | 320x256 | 0.661 | 0.821 | 0.714 | 0.759 | 0.672 | 0.534 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_320x256-c88c512a_20201227.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_320x256_20201227.log.json) |
+| [pose_resnet_152](/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res152_8xb64-210e_crowdpose-256x192.py) | 256x192 | 0.656 | 0.818 | 0.712 | 0.754 | 0.666 | 0.533 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res152_crowdpose_256x192-dbd49aba_20201227.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res152_crowdpose_256x192_20201227.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.yml b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1477c28deb33691632ccdb33035ed8075e43e241
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.yml
@@ -0,0 +1,71 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res50_8xb64-210e_crowdpose-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: CrowdPose
+ Name: td-hm_res50_8xb64-210e_crowdpose-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.637
+ AP (E): 0.738
+ AP (H): 0.506
+ AP (M): 0.65
+ AP@0.5: 0.808
+ AP@0.75: 0.692
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_crowdpose_256x192-c6a526b6_20201227.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: td-hm_res101_8xb64-210e_crowdpose-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.647
+ AP (E): 0.745
+ AP (H): 0.521
+ AP (M): 0.658
+ AP@0.5: 0.81
+ AP@0.75: 0.703
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_256x192-8f5870f4_20201227.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-320x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: td-hm_res101_8xb64-210e_crowdpose-320x256
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.661
+ AP (E): 0.759
+ AP (H): 0.534
+ AP (M): 0.672
+ AP@0.5: 0.821
+ AP@0.75: 0.714
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_crowdpose_320x256-c88c512a_20201227.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res152_8xb64-210e_crowdpose-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: CrowdPose
+ Name: td-hm_res152_8xb64-210e_crowdpose-256x192
+ Results:
+ - Dataset: CrowdPose
+ Metrics:
+ AP: 0.656
+ AP (E): 0.754
+ AP (H): 0.533
+ AP (M): 0.666
+ AP@0.5: 0.818
+ AP@0.75: 0.712
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res152_crowdpose_256x192-dbd49aba_20201227.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..3117314a43ab214da46a83c5621f1860bcb3f57f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_hrnet-w32_8xb64-210e_crowdpose-256x192.py
@@ -0,0 +1,152 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=14,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..79cae1d130a3713944069e37a3258811b068e655
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-320x256.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-320x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..eac5caf859095d3867fdd45fde58774b8c5ce54e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res101_8xb64-210e_crowdpose-320x256.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 320), heatmap_size=(64, 80), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res152_8xb64-210e_crowdpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res152_8xb64-210e_crowdpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..5b99439535a54b4bc69ca5ee270aa5a0d7fa26bf
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res152_8xb64-210e_crowdpose-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res50_8xb64-210e_crowdpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res50_8xb64-210e_crowdpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d669b2e2670657a25def5234037e371bede0882d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/crowdpose/td-hm_res50_8xb64-210e_crowdpose-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='crowdpose/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=14,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CrowdPoseDataset'
+data_mode = 'topdown'
+data_root = 'data/crowdpose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_trainval.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mmpose_crowdpose_test.json',
+ bbox_file='data/crowdpose/annotations/det_for_crowd_test_0.1_0.5.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/mmpose_crowdpose_test.json',
+ use_area=False,
+ iou_type='keypoints_crowd',
+ prefix='crowdpose')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.md b/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..3e387923d5ab435c8cd4428282043529f014d9cd
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.md
@@ -0,0 +1,38 @@
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on ExLPose-LLA val set with ground-truth bounding boxes
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-256x192.py) | 256x192 | 0.401 | 0.64 | 0.40 | 0.452 | 0.693 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-ll-256x192.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-ll-256x192.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.yml b/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2b8637f5283e9e13bf613ec23a91222f16a37af1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.yml
@@ -0,0 +1,18 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture:
+ - HRNet
+ Training Data: ExLPose-LL
+ Name: td-hm_hrnet-w32_8xb64-210e_exlpose-256x192
+ Results:
+ - Dataset: ExLPose
+ Metrics:
+ AP: 0.401
+ AP@0.5: 0.64
+ AP@0.75: 0.40
+ AR: 0.452
+ AR@0.5: 0.693
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-ll-256x192.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..c1fea18a4a08fee42effafcd6424b4ab4822acca
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/exlpose/td-hm_hrnet-w32_8xb64-210e_exlpose-256x192.py
@@ -0,0 +1,149 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=14,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'ExlposeDataset'
+data_mode = 'topdown'
+data_root = 'data/ExLPose/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ExLPose/ExLPose_train_LL.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/ExLPose/ExLPose_test_LL-A.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/ExLPose/ExLPose_test_LL-A.json',
+ use_area=False)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.md b/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.md
new file mode 100644
index 0000000000000000000000000000000000000000..6e5f3476cb12db673fc57504dc484565555e04ce
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.md
@@ -0,0 +1,80 @@
+
+
+ExLPose (2023)
+ +```bibtex +@inproceedings{ExLPose_2023_CVPR, + title={Human Pose Estimation in Extremely Low-Light Conditions}, + author={Sohyun Lee, Jaesung Rim, Boseung Jeong, Geonu Kim, ByungJu Woo, Haechan Lee, Sunghyun Cho, Suha Kwak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + year={2023} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+Results on Human-Art validation dataset with detector having human AP of 56.2 on Human-Art validation dataset
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) | 256x192 | 0.252 | 0.397 | 0.255 | 0.321 | 0.485 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) |
+| [pose_hrnet_w32-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py) | 256x192 | 0.399 | 0.545 | 0.420 | 0.466 | 0.613 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.json) |
+| [pose_hrnet_w48-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py) | 256x192 | 0.271 | 0.413 | 0.277 | 0.339 | 0.499 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py) | 256x192 | 0.417 | 0.553 | 0.442 | 0.481 | 0.617 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.json) |
+
+Results on Human-Art validation dataset with ground-truth bounding-box
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) | 256x192 | 0.533 | 0.771 | 0.562 | 0.574 | 0.792 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) |
+| [pose_hrnet_w32-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py) | 256x192 | 0.754 | 0.906 | 0.812 | 0.783 | 0.916 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.json) |
+| [pose_hrnet_w48-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py) | 256x192 | 0.557 | 0.782 | 0.593 | 0.595 | 0.804 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py) | 256x192 | 0.769 | 0.906 | 0.825 | 0.796 | 0.919 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.json) |
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [pose_hrnet_w32-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) | 256x192 | 0.749 | 0.906 | 0.821 | 0.804 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) |
+| [pose_hrnet_w32-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py) | 256x192 | 0.741 | 0.902 | 0.814 | 0.795 | 0.941 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.json) |
+| [pose_hrnet_w48-coco](configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py) | 256x192 | 0.756 | 0.908 | 0.826 | 0.809 | 0.945 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192_20220913.log) |
+| [pose_hrnet_w48-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py) | 256x192 | 0.751 | 0.905 | 0.822 | 0.805 | 0.943 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.yml b/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.yml
new file mode 100644
index 0000000000000000000000000000000000000000..08aa3f1f47d579b2e2696986554ee7072757f763
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.yml
@@ -0,0 +1,74 @@
+Collections:
+- Name: HRNet
+ Paper:
+ Title: Deep high-resolution representation learning for human pose estimation
+ URL: http://openaccess.thecvf.com/content_CVPR_2019/html/Sun_Deep_High-Resolution_Representation_Learning_for_Human_Pose_Estimation_CVPR_2019_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hrnet.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: &id002
+ - COCO
+ - Human-Art
+ Name: td-hm_hrnet-w32_8xb64-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.741
+ AP@0.5: 0.902
+ AP@0.75: 0.814
+ AR: 0.795
+ AR@0.5: 0.941
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.399
+ AP@0.5: 0.545
+ AP@0.75: 0.420
+ AR: 0.466
+ AR@0.5: 0.613
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.754
+ AP@0.5: 0.906
+ AP@0.75: 0.812
+ AR: 0.783
+ AR@0.5: 0.916
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w32_8xb64-210e_humanart-256x192-0773ef0b_20230614.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: *id002
+ Name: td-hm_hrnet-w48_8xb32-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.751
+ AP@0.5: 0.905
+ AP@0.75: 0.822
+ AR: 0.805
+ AR@0.5: 0.943
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.417
+ AP@0.5: 0.553
+ AP@0.75: 0.442
+ AR: 0.481
+ AR@0.5: 0.617
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.769
+ AP@0.5: 0.906
+ AP@0.75: 0.825
+ AR: 0.796
+ AR@0.5: 0.919
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_hrnet-w48_8xb32-210e_humanart-256x192-05178983_20230614.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4aa431e044f7a6cbf8fcad8a25298b2e14fedfa2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.75,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch='base',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.3,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_base.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/'
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..925f68e3d18903e511a5c89426e5bd595aa4d1b6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=32,
+ layer_decay_rate=0.85,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmcls.VisionTransformer',
+ arch='huge',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.55,
+ with_cls_token=False,
+ output_cls_token=False,
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_huge.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/'
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-large_8xb64-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-large_8xb64-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ea9dbf3952876d9c70a06b982bf29eb461cfa8e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-large_8xb64-210e_humanart-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=24,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmcls.VisionTransformer',
+ arch='large',
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.5,
+ with_cls_token=False,
+ output_cls_token=False,
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_large.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/'
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ed7817d2fe2f2d43c917f04c66bacf6b79f0a1f9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=5e-4, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch={
+ 'embed_dims': 384,
+ 'num_layers': 12,
+ 'num_heads': 12,
+ 'feedforward_channels': 384 * 4
+ },
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.1,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'v1/pretrained_models/mae_pretrain_vit_small.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=384,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+data_root = 'data/'
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..bf9fa25beb8ed2e5bc4dd565ef35d56e031fb779
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w32_8xb64-210e_humanart-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6a5ae0707c2ac1973a293d41a51ac8bb471ae9fe
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_hrnet-w48_8xb32-210e_humanart-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'HumanArtDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/training_humanart_coco.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='HumanArt/annotations/validation_humanart.json',
+ bbox_file=f'{data_root}HumanArt/person_detection_results/'
+ 'HumanArt_validation_detections_AP_H_56_person.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'HumanArt/annotations/validation_humanart.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.md b/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.md
new file mode 100644
index 0000000000000000000000000000000000000000..a4d2dd6c50fff926f0b099e46a2e81f4c16076b1
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.md
@@ -0,0 +1,97 @@
+To utilize ViTPose, you'll need to have [MMPreTrain](https://github.com/open-mmlab/mmpretrain). To install the required version, run the following command:
+
+```shell
+mim install 'mmpretrain>=1.0.0'
+```
+
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
+
+
+
+
+ViTPose (NeurIPS'2022)
+ +```bibtex +@inproceedings{ + xu2022vitpose, + title={Vi{TP}ose: Simple Vision Transformer Baselines for Human Pose Estimation}, + author={Yufei Xu and Jing Zhang and Qiming Zhang and Dacheng Tao}, + booktitle={Advances in Neural Information Processing Systems}, + year={2022}, +} +``` + +
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+Results on Human-Art validation dataset with detector having human AP of 56.2 on Human-Art validation dataset
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ViTPose-S-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py) | 256x192 | 0.228 | 0.371 | 0.229 | 0.298 | 0.467 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.json) |
+| [ViTPose-S-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py) | 256x192 | 0.381 | 0.532 | 0.405 | 0.448 | 0.602 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.json) |
+| [ViTPose-B-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.270 | 0.423 | 0.272 | 0.340 | 0.510 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.json) |
+| [ViTPose-B-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.410 | 0.549 | 0.434 | 0.475 | 0.615 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.json) |
+| [ViTPose-L-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.342 | 0.498 | 0.357 | 0.413 | 0.577 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.json) |
+| [ViTPose-L-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.459 | 0.592 | 0.487 | 0.525 | 0.656 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.json) |
+| [ViTPose-H-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py) | 256x192 | 0.377 | 0.541 | 0.391 | 0.447 | 0.615 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.json) |
+| [ViTPose-H-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py) | 256x192 | 0.468 | 0.594 | 0.498 | 0.534 | 0.655 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.json) |
+
+Results on Human-Art validation dataset with ground-truth bounding-box
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ViTPose-S-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py) | 256x192 | 0.507 | 0.758 | 0.531 | 0.551 | 0.780 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.json) |
+| [ViTPose-S-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py) | 256x192 | 0.738 | 0.905 | 0.802 | 0.768 | 0.911 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.json) |
+| [ViTPose-B-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.555 | 0.782 | 0.590 | 0.599 | 0.809 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.json) |
+| [ViTPose-B-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.759 | 0.905 | 0.823 | 0.790 | 0.917 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.json) |
+| [ViTPose-L-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.637 | 0.838 | 0.689 | 0.677 | 0.859 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.json) |
+| [ViTPose-L-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.789 | 0.916 | 0.845 | 0.819 | 0.929 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.json) |
+| [ViTPose-H-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py) | 256x192 | 0.665 | 0.860 | 0.715 | 0.701 | 0.871 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.json) |
+| [ViTPose-H-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py) | 256x192 | 0.800 | 0.926 | 0.855 | 0.828 | 0.933 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.json) |
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+> With classic decoder
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [ViTPose-S-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192.py) | 256x192 | 0.739 | 0.903 | 0.816 | 0.792 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-small_8xb64-210e_coco-256x192-62d7a712_20230314.json) |
+| [ViTPose-S-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py) | 256x192 | 0.737 | 0.902 | 0.811 | 0.792 | 0.942 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.json) |
+| [ViTPose-B-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192.py) | 256x192 | 0.757 | 0.905 | 0.829 | 0.810 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-base_8xb64-210e_coco-256x192-216eae50_20230314.json) |
+| [ViTPose-B-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.758 | 0.906 | 0.829 | 0.812 | 0.946 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.json) |
+| [ViTPose-L-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192.py) | 256x192 | 0.782 | 0.914 | 0.850 | 0.834 | 0.952 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-large_8xb64-210e_coco-256x192-53609f55_20230314.json) |
+| [ViTPose-L-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py) | 256x192 | 0.782 | 0.914 | 0.849 | 0.835 | 0.953 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.json) |
+| [ViTPose-H-coco](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192.py) | 256x192 | 0.788 | 0.917 | 0.855 | 0.839 | 0.954 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_ViTPose-huge_8xb64-210e_coco-256x192-e32adcd4_20230314.json) |
+| [ViTPose-H-humanart-coco](configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py) | 256x192 | 0.788 | 0.914 | 0.853 | 0.841 | 0.956 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.yml b/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cbbe965c2d9f2147de60d5b6a072934c8efa12ca
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.yml
@@ -0,0 +1,145 @@
+Collections:
+- Name: ViTPose
+ Paper:
+ Title: 'ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation'
+ URL: https://arxiv.org/abs/2204.12484
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/vitpose.md
+ Metadata:
+ Training Resources: 8x A100 GPUs
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-small_8xb64-210e_humanart-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: &id001
+ - ViTPose
+ - Classic Head
+ Model Size: Small
+ Training Data: &id002
+ - COCO
+ - Human-Art
+ Name: td-hm_ViTPose-small_8xb64-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.737
+ AP@0.5: 0.902
+ AP@0.75: 0.811
+ AR: 0.792
+ AR@0.5: 0.942
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.381
+ AP@0.5: 0.532
+ AP@0.75: 0.405
+ AR: 0.448
+ AR@0.5: 0.602
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.738
+ AP@0.5: 0.905
+ AP@0.75: 0.802
+ AR: 0.768
+ AR@0.5: 0.911
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-small_8xb64-210e_humanart-256x192-5cbe2bfc_20230611.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-base_8xb64-210e_humanart-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Base
+ Training Data: *id002
+ Name: td-hm_ViTPose-base_8xb64-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.758
+ AP@0.5: 0.906
+ AP@0.75: 0.829
+ AR: 0.812
+ AR@0.5: 0.946
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.410
+ AP@0.5: 0.549
+ AP@0.75: 0.434
+ AR: 0.475
+ AR@0.5: 0.615
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.759
+ AP@0.5: 0.905
+ AP@0.75: 0.823
+ AR: 0.790
+ AR@0.5: 0.917
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-base_8xb64-210e_humanart-256x192-b417f546_20230611.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-large_8xb64-210e_humanart-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Large
+ Training Data: *id002
+ Name: td-hm_ViTPose-large_8xb64-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.782
+ AP@0.5: 0.914
+ AP@0.75: 0.849
+ AR: 0.835
+ AR@0.5: 0.953
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.459
+ AP@0.5: 0.592
+ AP@0.75: 0.487
+ AR: 0.525
+ AR@0.5: 0.656
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.789
+ AP@0.5: 0.916
+ AP@0.75: 0.845
+ AR: 0.819
+ AR@0.5: 0.929
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-large_8xb64-210e_humanart-256x192-9aba9345_20230614.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/humanart/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192.py
+ In Collection: ViTPose
+ Metadata:
+ Architecture: *id001
+ Model Size: Huge
+ Training Data: *id002
+ Name: td-hm_ViTPose-huge_8xb64-210e_humanart-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.788
+ AP@0.5: 0.914
+ AP@0.75: 0.853
+ AR: 0.841
+ AR@0.5: 0.956
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art
+ Metrics:
+ AP: 0.468
+ AP@0.5: 0.594
+ AP@0.75: 0.498
+ AR: 0.534
+ AR@0.5: 0.655
+ Task: Body 2D Keypoint
+ - Dataset: Human-Art(GT)
+ Metrics:
+ AP: 0.800
+ AP@0.5: 0.926
+ AP@0.75: 0.855
+ AR: 0.828
+ AR@0.5: 0.933
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/human_art/td-hm_ViTPose-huge_8xb64-210e_humanart-256x192-603bb573_20230612.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.md b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.md
new file mode 100644
index 0000000000000000000000000000000000000000..29df027e3f76c0801c1c89303e776f78d5c6047e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.md
@@ -0,0 +1,56 @@
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
+
+
+
+CPM (CVPR'2016)
+ +```bibtex +@inproceedings{wei2016convolutional, + title={Convolutional pose machines}, + author={Wei, Shih-En and Ramakrishna, Varun and Kanade, Takeo and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={4724--4732}, + year={2016} +} +``` + +
+
+
+Results on Sub-JHMDB dataset
+
+The models are pre-trained on MPII dataset only. NO test-time augmentation (multi-scale /rotation testing) is used.
+
+- Normalized by Person Size
+
+| Split | Arch | Input Size | Head | Sho | Elb | Wri | Hip | Knee | Ank | Mean | ckpt | log |
+| :------ | :------------------------------------------------: | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :-------------------------------------------------: | :------------------------------------------------: |
+| Sub1 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py) | 368x368 | 96.1 | 91.9 | 81.0 | 78.9 | 96.6 | 90.8 | 87.3 | 89.5 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368-2d2585c9_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368_20201122.log.json) |
+| Sub2 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py) | 368x368 | 98.1 | 93.6 | 77.1 | 70.9 | 94.0 | 89.1 | 84.7 | 87.4 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368-fc742f1f_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368_20201122.log.json) |
+| Sub3 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py) | 368x368 | 97.9 | 94.9 | 87.3 | 84.0 | 98.6 | 94.4 | 86.2 | 92.4 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368-49337155_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368_20201122.log.json) |
+| Average | cpm | 368x368 | 97.4 | 93.5 | 81.5 | 77.9 | 96.4 | 91.4 | 86.1 | 89.8 | - | - |
+
+- Normalized by Torso Size
+
+| Split | Arch | Input Size | Head | Sho | Elb | Wri | Hip | Knee | Ank | Mean | ckpt | log |
+| :------ | :------------------------------------------------: | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :-------------------------------------------------: | :------------------------------------------------: |
+| Sub1 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py) | 368x368 | 89.0 | 63.0 | 54.0 | 54.9 | 68.2 | 63.1 | 61.2 | 66.0 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368-2d2585c9_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368_20201122.log.json) |
+| Sub2 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py) | 368x368 | 90.3 | 57.9 | 46.8 | 44.3 | 60.8 | 58.2 | 62.4 | 61.1 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368-fc742f1f_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368_20201122.log.json) |
+| Sub3 | [cpm](/configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py) | 368x368 | 91.0 | 72.6 | 59.9 | 54.0 | 73.2 | 68.5 | 65.8 | 70.3 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368-49337155_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368_20201122.log.json) |
+| Average | cpm | 368x368 | 90.1 | 64.5 | 53.6 | 51.1 | 67.4 | 63.3 | 63.1 | 65.7 | - | - |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.yml b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f9f6d7568b50b65bd8f5754539f861b15daca8c7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.yml
@@ -0,0 +1,116 @@
+Models:
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: &id001
+ - CPM
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 87.3
+ Elb: 81
+ Head: 96.1
+ Hip: 96.6
+ Knee: 90.8
+ Mean: 89.5
+ Sho: 91.9
+ Wri: 78.9
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368-2d2585c9_20201122.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 84.7
+ Elb: 77.1
+ Head: 98.1
+ Hip: 94.0
+ Knee: 89.1
+ Mean: 87.4
+ Sho: 93.6
+ Wri: 70.9
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368-fc742f1f_20201122.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 86.2
+ Elb: 87.3
+ Head: 97.9
+ Hip: 98.6
+ Knee: 94.4
+ Mean: 92.4
+ Sho: 94.9
+ Wri: 84.0
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368-49337155_20201122.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 61.2
+ Elb: 54.0
+ Head: 89.0
+ Hip: 68.2
+ Knee: 63.1
+ Mean: 66.0
+ Sho: 63.0
+ Wri: 54.9
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub1_368x368-2d2585c9_20201122.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 62.4
+ Elb: 46.8
+ Head: 90.3
+ Hip: 60.8
+ Knee: 58.2
+ Mean: 61.1
+ Sho: 57.9
+ Wri: 44.3
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub2_368x368-fc742f1f_20201122.pth
+- Config: configs/body/2d_kpt_sview_rgb_img/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 65.8
+ Elb: 59.9
+ Head: 91.0
+ Hip: 73.2
+ Knee: 68.5
+ Mean: 70.3
+ Sho: 72.6
+ Wri: 54.0
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_jhmdb_sub3_368x368-49337155_20201122.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.md b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.md
new file mode 100644
index 0000000000000000000000000000000000000000..22422e731653b1b01840feb0f79eb82459bb968f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.md
@@ -0,0 +1,81 @@
+
+
+JHMDB (ICCV'2013)
+ +```bibtex +@inproceedings{Jhuang:ICCV:2013, + title = {Towards understanding action recognition}, + author = {H. Jhuang and J. Gall and S. Zuffi and C. Schmid and M. J. Black}, + booktitle = {International Conf. on Computer Vision (ICCV)}, + month = Dec, + pages = {3192-3199}, + year = {2013} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on Sub-JHMDB dataset
+
+The models are pre-trained on MPII dataset only. *NO* test-time augmentation (multi-scale /rotation testing) is used.
+
+- Normalized by Person Size
+
+| Split | Arch | Input Size | Head | Sho | Elb | Wri | Hip | Knee | Ank | Mean | ckpt | log |
+| :------ | :------------------------------------------------: | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :-------------------------------------------------: | :------------------------------------------------: |
+| Sub1 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py) | 256x256 | 99.1 | 98.0 | 93.8 | 91.3 | 99.4 | 96.5 | 92.8 | 96.1 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256-932cb3b4_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256_20201122.log.json) |
+| Sub2 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py) | 256x256 | 99.3 | 97.1 | 90.6 | 87.0 | 98.9 | 96.3 | 94.1 | 95.0 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256-83d606f7_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256_20201122.log.json) |
+| Sub3 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py) | 256x256 | 99.0 | 97.9 | 94.0 | 91.6 | 99.7 | 98.0 | 94.7 | 96.7 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256-c4ec1a0b_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256_20201122.log.json) |
+| Average | pose_resnet_50 | 256x256 | 99.2 | 97.7 | 92.8 | 90.0 | 99.3 | 96.9 | 93.9 | 96.0 | - | - |
+| Sub1 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py) | 256x256 | 99.1 | 98.5 | 94.6 | 92.0 | 99.4 | 94.6 | 92.5 | 96.1 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256-f0574a52_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256_20201122.log.json) |
+| Sub2 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py) | 256x256 | 99.3 | 97.8 | 91.0 | 87.0 | 99.1 | 96.5 | 93.8 | 95.2 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256-f63af0ff_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256_20201122.log.json) |
+| Sub3 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py) | 256x256 | 98.8 | 98.4 | 94.3 | 92.1 | 99.8 | 97.5 | 93.8 | 96.7 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256-c4bc2ddb_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256_20201122.log.json) |
+| Average | pose_resnet_50 (2 Deconv.) | 256x256 | 99.1 | 98.2 | 93.3 | 90.4 | 99.4 | 96.2 | 93.4 | 96.0 | - | - |
+
+- Normalized by Torso Size
+
+| Split | Arch | Input Size | Head | Sho | Elb | Wri | Hip | Knee | Ank | Mean | ckpt | log |
+| :------ | :------------------------------------------------: | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :-------------------------------------------------: | :------------------------------------------------: |
+| Sub1 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py) | 256x256 | 93.3 | 83.2 | 74.4 | 72.7 | 85.0 | 81.2 | 78.9 | 81.9 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256-932cb3b4_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256_20201122.log.json) |
+| Sub2 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py) | 256x256 | 94.1 | 74.9 | 64.5 | 62.5 | 77.9 | 71.9 | 78.6 | 75.5 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256-83d606f7_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256_20201122.log.json) |
+| Sub3 | [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py) | 256x256 | 97.0 | 82.2 | 74.9 | 70.7 | 84.7 | 83.7 | 84.2 | 82.9 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256-c4ec1a0b_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256_20201122.log.json) |
+| Average | pose_resnet_50 | 256x256 | 94.8 | 80.1 | 71.3 | 68.6 | 82.5 | 78.9 | 80.6 | 80.1 | - | - |
+| Sub1 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py) | 256x256 | 92.4 | 80.6 | 73.2 | 70.5 | 82.3 | 75.4 | 75.0 | 79.2 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256-f0574a52_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256_20201122.log.json) |
+| Sub2 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py) | 256x256 | 93.4 | 73.6 | 63.8 | 60.5 | 75.1 | 68.4 | 75.5 | 73.7 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256-f63af0ff_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256_20201122.log.json) |
+| Sub3 | [pose_resnet_50 (2 Deconv.)](/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py) | 256x256 | 96.1 | 81.2 | 72.6 | 67.9 | 83.6 | 80.9 | 81.5 | 81.2 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256-c4bc2ddb_20201122.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256_20201122.log.json) |
+| Average | pose_resnet_50 (2 Deconv.) | 256x256 | 94.0 | 78.5 | 69.9 | 66.3 | 80.3 | 74.9 | 77.3 | 78.0 | - | - |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.yml b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d7480d12a0ce45db7ea28af0b02e2493b34c04b8
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.yml
@@ -0,0 +1,231 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub1-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 92.8
+ Elb: 93.8
+ Head: 99.1
+ Hip: 99.4
+ Knee: 96.5
+ Mean: 96.1
+ Sho: 98.0
+ Wri: 91.3
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256-932cb3b4_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub2-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 94.1
+ Elb: 90.6
+ Head: 99.3
+ Hip: 98.9
+ Knee: 96.3
+ Mean: 95.0
+ Sho: 97.1
+ Wri: 87.0
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256-83d606f7_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub3-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 94.7
+ Elb: 94.0
+ Head: 99.0
+ Hip: 99.7
+ Knee: 98.0
+ Mean: 96.7
+ Sho: 97.9
+ Wri: 91.6
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256-c4ec1a0b_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 92.5
+ Elb: 94.6
+ Head: 99.1
+ Hip: 99.4
+ Knee: 94.6
+ Mean: 96.1
+ Sho: 98.5
+ Wri: 92.0
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256-f0574a52_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 93.8
+ Elb: 91.0
+ Head: 99.3
+ Hip: 99.1
+ Knee: 96.5
+ Mean: 95.2
+ Sho: 97.8
+ Wri: 87.0
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256-f63af0ff_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 93.8
+ Elb: 94.3
+ Head: 98.8
+ Hip: 99.8
+ Knee: 97.5
+ Mean: 96.7
+ Sho: 98.4
+ Wri: 92.1
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256-c4bc2ddb_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub1-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 78.9
+ Elb: 74.4
+ Head: 93.3
+ Hip: 85.0
+ Knee: 81.2
+ Mean: 81.9
+ Sho: 83.2
+ Wri: 72.7
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub1_256x256-932cb3b4_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub2-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 78.6
+ Elb: 64.5
+ Head: 94.1
+ Hip: 77.9
+ Knee: 71.9
+ Mean: 75.5
+ Sho: 74.9
+ Wri: 62.5
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub2_256x256-83d606f7_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50_8xb64-20e_jhmdb-sub3-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 84.2
+ Elb: 74.9
+ Head: 97.0
+ Hip: 84.7
+ Knee: 83.7
+ Mean: 82.9
+ Sho: 82.2
+ Wri: 70.7
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_jhmdb_sub3_256x256-c4ec1a0b_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 75.0
+ Elb: 73.2
+ Head: 92.4
+ Hip: 82.3
+ Knee: 75.4
+ Mean: 79.2
+ Sho: 80.6
+ Wri: 70.5
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub1_256x256-f0574a52_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 75.5
+ Elb: 63.8
+ Head: 93.4
+ Hip: 75.1
+ Knee: 68.4
+ Mean: 73.7
+ Sho: 73.6
+ Wri: 60.5
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub2_256x256-f63af0ff_20201122.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: JHMDB
+ Name: td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256
+ Results:
+ - Dataset: JHMDB
+ Metrics:
+ Ank: 81.5
+ Elb: 72.6
+ Head: 96.1
+ Hip: 83.6
+ Knee: 80.9
+ Mean: 81.2
+ Sho: 81.2
+ Wri: 67.9
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_2deconv_jhmdb_sub3_256x256-c4bc2ddb_20201122.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py
new file mode 100644
index 0000000000000000000000000000000000000000..479039f5428f7f5e736beb4cfe9c7b88c986e4ed
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub1-368x368.py
@@ -0,0 +1,127 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(368, 368), heatmap_size=(46, 46), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=15,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=15,
+ out_channels=15,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py
new file mode 100644
index 0000000000000000000000000000000000000000..88b60e9f87dfc783610aa8222a4256d9625efc60
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub2-368x368.py
@@ -0,0 +1,127 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(368, 368), heatmap_size=(46, 46), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=15,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=15,
+ out_channels=15,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py
new file mode 100644
index 0000000000000000000000000000000000000000..602b2bcfd6aac7df667da5d71ea9d8ea233778ad
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_cpm_8xb32-40e_jhmdb-sub3-368x368.py
@@ -0,0 +1,127 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(368, 368), heatmap_size=(46, 46), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=15,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=15,
+ out_channels=15,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..8d104e1e86e0818947f86612dbbe8b4c9b30e31f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub1-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(32, 32), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..6135ce29ab3b070586d0324f95c37b272002459e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub2-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(32, 32), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..44d95b15b2a0e73eb93deefc32e5e3f093212648
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50-2deconv_8xb64-40e_jhmdb-sub3-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=40, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=40,
+ milestones=[20, 30],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(32, 32), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..9578a66c18b3b58a9cd85ecb4941913eac6175ea
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub1-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[8, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub1_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..856c89e660b7e2e866c4bd48eff32bf9faff731d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub2-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[8, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub2_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..73065968848a063b462504c55e4a2ac85ffd49d9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/jhmdb/td-hm_res50_8xb64-20e_jhmdb-sub3-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[8, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ResNet', depth=50),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=15,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth' # noqa: E501
+
+# base dataset settings
+dataset_type = 'JhmdbDataset'
+data_mode = 'topdown'
+data_root = 'data/jhmdb/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/Sub3_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='JhmdbPCKAccuracy', thr=0.2, norm_item=['bbox', 'torso']),
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..0c2888bb88431497c30d7a046595488c7edaa87b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.md
@@ -0,0 +1,39 @@
+
+
+JHMDB (ICCV'2013)
+ +```bibtex +@inproceedings{Jhuang:ICCV:2013, + title = {Towards understanding action recognition}, + author = {H. Jhuang and J. Gall and S. Zuffi and C. Schmid and M. J. Black}, + booktitle = {International Conf. on Computer Vision (ICCV)}, + month = Dec, + pages = {3192-3199}, + year = {2013} +} +``` + +
+
+
+
+
+CPM (CVPR'2016)
+ +```bibtex +@inproceedings{wei2016convolutional, + title={Convolutional pose machines}, + author={Wei, Shih-En and Ramakrishna, Varun and Kanade, Takeo and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={4724--4732}, + year={2016} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [cpm](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_cpm_8xb64-210e_mpii-368x368.py) | 368x368 | 0.876 | 0.285 | [ckpt](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_mpii_368x368-116e62b8_20200822.pth) | [log](https://download.openmmlab.com/mmpose/top_down/cpm/cpm_mpii_368x368_20200822.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3e2e439253e2eccb96d42ec887d6889abe520d65
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_cpm_8xb64-210e_mpii-368x368.py
+ In Collection: CPM
+ Metadata:
+ Architecture:
+ - CPM
+ Training Data: MPII
+ Name: td-hm_cpm_8xb64-210e_mpii-368x368
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.876
+ Mean@0.1: 0.285
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/cpm/cpm_mpii_368x368-116e62b8_20200822.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext-m_udp_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext-m_udp_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..fc8d6fdcea8d717c9ecbc70fb966364dea14257e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext-m_udp_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,210 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 210 to 420 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=1024)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/pose/MPI/',
+# f'{data_root}': 's3://openmmlab/datasets/pose/MPI/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='PCK', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..80aec4c28e443d64a5db78d81508b182695f487d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.md
@@ -0,0 +1,57 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext-m_udp_8xb64-210e_mpii-256x256.py) | 256x256 | 0.902 | 0.303 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-mpii_pt-in1k_210e-256x256-68d0402f_20230208.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-mpii_pt-in1k_210e-256x256-68d0402f_20230208.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7256f3b15443a4f51a68a32c6f271ef6d8c58089
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext-m_udp_8xb64-210e_mpii-256x256.py
+ In Collection: UDP
+ Metadata:
+ Architecture:
+ - UDP
+ - CSPNeXt
+ Training Data: MPII
+ Name: cspnext-m_udp_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.902
+ Mean@0.1: 0.303
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-mpii_pt-in1k_210e-256x256-68d0402f_20230208.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..98e795de4ff558bf49270e9c1ed6890e9de1f311
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.md
@@ -0,0 +1,41 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_hourglass_52](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb64-210e_mpii-256x256.py) | 256x256 | 0.889 | 0.317 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_256x256-ae358435_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_256x256_20200812.log.json) |
+| [pose_hourglass_52](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb32-210e_mpii-384x384.py) | 384x384 | 0.894 | 0.367 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_384x384-04090bc3_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_384x384_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..eb22cd98ce6536a4280cb188694d47d51c47e050
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.yml
@@ -0,0 +1,28 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb64-210e_mpii-256x256.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture: &id001
+ - Hourglass
+ Training Data: MPII
+ Name: td-hm_hourglass52_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.889
+ Mean@0.1: 0.317
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_256x256-ae358435_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb32-210e_mpii-384x384.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_hourglass52_8xb32-210e_mpii-384x384
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.894
+ Mean@0.1: 0.367
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hourglass/hourglass52_mpii_384x384-04090bc3_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..a03a96ba2e5aa9a39bd1849ec933b4ac58e4f438
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.md
@@ -0,0 +1,57 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_hrnet_w32_dark](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256.py) | 256x256 | 0.904 | 0.354 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256_dark-f1601c5b_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256_dark_20200927.log.json) |
+| [pose_hrnet_w48_dark](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256.py) | 256x256 | 0.905 | 0.360 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256_dark-0decd39f_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256_dark_20200927.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0283b5c827de5a2f170460ddb7e159328faf9e76
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.yml
@@ -0,0 +1,29 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ - DarkPose
+ Training Data: MPII
+ Name: td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.904
+ Mean@0.1: 0.354
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256_dark-f1601c5b_20200927.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.905
+ Mean@0.1: 0.36
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256_dark-0decd39f_20200927.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..7e8a69f64f5165db52c2d672464c080a73427215
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.md
@@ -0,0 +1,40 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_8xb64-210e_mpii-256x256.py) | 256x256 | 0.900 | 0.334 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256-6c4f923f_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256_20200812.log.json) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_8xb64-210e_mpii-256x256.py) | 256x256 | 0.901 | 0.337 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256-92cab7bd_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f32129742da5306e1d9f1ea7b8048480a7efa12c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.yml
@@ -0,0 +1,28 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_8xb64-210e_mpii-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: MPII
+ Name: td-hm_hrnet-w32_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.9
+ Mean@0.1: 0.334
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_mpii_256x256-6c4f923f_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_8xb64-210e_mpii-256x256.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_hrnet-w48_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.901
+ Mean@0.1: 0.337
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_mpii_256x256-92cab7bd_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..e6647569508429fe88683ddcb16c0eaebd3309a6
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.md
@@ -0,0 +1,39 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+LiteHRNet (CVPR'2021)
+ +```bibtex +@inproceedings{Yulitehrnet21, + title={Lite-HRNet: A Lightweight High-Resolution Network}, + author={Yu, Changqian and Xiao, Bin and Gao, Changxin and Yuan, Lu and Zhang, Lei and Sang, Nong and Wang, Jingdong}, + booktitle={CVPR}, + year={2021} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [LiteHRNet-18](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-18_8xb64-210e_mpii-256x256.py) | 256x256 | 0.859 | 0.260 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_mpii_256x256-cabd7984_20210623.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_mpii_256x256_20210623.log.json) |
+| [LiteHRNet-30](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-30_8xb64-210e_mpii-256x256.py) | 256x256 | 0.869 | 0.271 | [ckpt](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_mpii_256x256-faae8bd8_20210622.pth) | [log](https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_mpii_256x256_20210622.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c4314b7a74d57bbe45cd635aba06313043cc912e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.yml
@@ -0,0 +1,28 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-18_8xb64-210e_mpii-256x256.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: &id001
+ - LiteHRNet
+ Training Data: MPII
+ Name: td-hm_litehrnet-18_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.859
+ Mean@0.1: 0.26
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet18_mpii_256x256-cabd7984_20210623.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-30_8xb64-210e_mpii-256x256.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_litehrnet-30_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.869
+ Mean@0.1: 0.271
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/litehrnet/litehrnet30_mpii_256x256-faae8bd8_20210622.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..8bb280a8210042fb5d5f7a3f085e7a7b98ad651b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.md
@@ -0,0 +1,39 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_mobilenetv2](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_mobilenetv2_8xb64-210e_mpii-256x256.py) | 256x256 | 0.854 | 0.234 | [ckpt](https://download.openmmlab.com/mmpose/top_down/mobilenetv2/mobilenetv2_mpii_256x256-e068afa7_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/mobilenetv2/mobilenetv2_mpii_256x256_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..afc54f79340332a73b079284f6920d9476972e7f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_mobilenetv2_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: MPII
+ Name: td-hm_mobilenetv2_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.854
+ Mean@0.1: 0.234
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/mobilenetv2/mobilenetv2_mpii_256x256-e068afa7_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..b8d98c4d6e9b6e716ce543b7ddb3101eef58eb20
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.md
@@ -0,0 +1,58 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res50_8xb64-210e_mpii-256x256.py) | 256x256 | 0.882 | 0.286 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256_20200812.log.json) |
+| [pose_resnet_101](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res101_8xb64-210e_mpii-256x256.py) | 256x256 | 0.888 | 0.290 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_mpii_256x256-416f5d71_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_mpii_256x256_20200812.log.json) |
+| [pose_resnet_152](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res152_8xb32-210e_mpii-256x256.py) | 256x256 | 0.889 | 0.303 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res152_mpii_256x256-3ecba29d_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res152_mpii_256x256_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ff92c4f7ce78a07c141c049902d6f2cd320e0dcb
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.yml
@@ -0,0 +1,42 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res50_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: MPII
+ Name: td-hm_res50_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.882
+ Mean@0.1: 0.286
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_mpii_256x256-418ffc88_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res101_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_res101_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.888
+ Mean@0.1: 0.29
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_mpii_256x256-416f5d71_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res152_8xb32-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_res152_8xb32-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.889
+ Mean@0.1: 0.303
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res152_mpii_256x256-3ecba29d_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..23362650980ca29784bb769d3bd55538272b79d5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.md
@@ -0,0 +1,41 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+ResNetV1D (CVPR'2019)
+ +```bibtex +@inproceedings{he2019bag, + title={Bag of tricks for image classification with convolutional neural networks}, + author={He, Tong and Zhang, Zhi and Zhang, Hang and Zhang, Zhongyue and Xie, Junyuan and Li, Mu}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={558--567}, + year={2019} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_resnetv1d_50](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d50_8xb64-210e_mpii-256x256.py) | 256x256 | 0.881 | 0.290 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d50_mpii_256x256-2337a92e_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d50_mpii_256x256_20200812.log.json) |
+| [pose_resnetv1d_101](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d101_8xb64-210e_mpii-256x256.py) | 256x256 | 0.883 | 0.295 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d101_mpii_256x256-2851d710_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d101_mpii_256x256_20200812.log.json) |
+| [pose_resnetv1d_152](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d152_8xb64-210e_mpii-256x256.py) | 256x256 | 0.888 | 0.300 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d152_mpii_256x256-8b10a87c_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d152_mpii_256x256_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..e98e722db1428a622c82c53255fb962c890d3f58
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.yml
@@ -0,0 +1,42 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d50_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNetV1D
+ Training Data: MPII
+ Name: td-hm_resnetv1d50_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.881
+ Mean@0.1: 0.29
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d50_mpii_256x256-2337a92e_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d101_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_resnetv1d101_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.883
+ Mean@0.1: 0.295
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d101_mpii_256x256-2851d710_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d152_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_resnetv1d152_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.888
+ Mean@0.1: 0.3
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnetv1d/resnetv1d152_mpii_256x256-8b10a87c_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..bf9d5acf8c1e48aca593f1162c35e32e73b6774d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.md
@@ -0,0 +1,39 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+ResNext (CVPR'2017)
+ +```bibtex +@inproceedings{xie2017aggregated, + title={Aggregated residual transformations for deep neural networks}, + author={Xie, Saining and Girshick, Ross and Doll{\'a}r, Piotr and Tu, Zhuowen and He, Kaiming}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1492--1500}, + year={2017} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_resnext_152](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnext152_8xb32-210e_mpii-256x256.py) | 256x256 | 0.887 | 0.294 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_mpii_256x256-df302719_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_mpii_256x256_20200927.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..580dda77b013b7eae4ed288925741cb8d3f6f246
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnext152_8xb32-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNext
+ Training Data: MPII
+ Name: td-hm_resnext152_8xb32-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.887
+ Mean@0.1: 0.294
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnext/resnext152_mpii_256x256-df302719_20200927.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..cf0e4befffc4b023dfe84a23d7880cb959154f1e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.md
@@ -0,0 +1,40 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_scnet_50](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet50_8xb64-210e_mpii-256x256.py) | 256x256 | 0.888 | 0.290 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_mpii_256x256-a54b6af5_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_mpii_256x256_20200812.log.json) |
+| [pose_scnet_101](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet101_8xb64-210e_mpii-256x256.py) | 256x256 | 0.887 | 0.293 | [ckpt](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_mpii_256x256-b4c2d184_20200812.pth) | [log](https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_mpii_256x256_20200812.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b1ec80fd8005dd50847171cd7c916cece02dd94d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.yml
@@ -0,0 +1,29 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet50_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - SCNet
+ Training Data: MPII
+ Name: td-hm_scnet50_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.888
+ Mean@0.1: 0.29
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet50_mpii_256x256-a54b6af5_20200812.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet101_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_scnet101_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.887
+ Mean@0.1: 0.293
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/scnet/scnet101_mpii_256x256-b4c2d184_20200812.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..1c92ecf9ea19a05665faf7ff2feb62a1ec5753a2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.md
@@ -0,0 +1,43 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+SEResNet (CVPR'2018)
+ +```bibtex +@inproceedings{hu2018squeeze, + title={Squeeze-and-excitation networks}, + author={Hu, Jie and Shen, Li and Sun, Gang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={7132--7141}, + year={2018} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_seresnet_50](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet50_8xb64-210e_mpii-256x256.py) | 256x256 | 0.884 | 0.292 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_mpii_256x256-1bb21f79_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_mpii_256x256_20200927.log.json) |
+| [pose_seresnet_101](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet101_8xb64-210e_mpii-256x256.py) | 256x256 | 0.884 | 0.295 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_mpii_256x256-0ba14ff5_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_mpii_256x256_20200927.log.json) |
+| [pose_seresnet_152\*](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet152_8xb32-210e_mpii-256x256.py) | 256x256 | 0.884 | 0.287 | [ckpt](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_mpii_256x256-6ea1e774_20200927.pth) | [log](https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_mpii_256x256_20200927.log.json) |
+
+Note that * means without imagenet pre-training.
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..e71050811a4a028626e7cbbb4563533c9fdd6e57
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.yml
@@ -0,0 +1,42 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet50_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - SEResNet
+ Training Data: MPII
+ Name: td-hm_seresnet50_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.884
+ Mean@0.1: 0.292
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet50_mpii_256x256-1bb21f79_20200927.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet101_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_seresnet101_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.884
+ Mean@0.1: 0.295
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet101_mpii_256x256-0ba14ff5_20200927.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet152_8xb32-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-hm_seresnet152_8xb32-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.884
+ Mean@0.1: 0.287
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/seresnet/seresnet152_mpii_256x256-6ea1e774_20200927.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..3cdaaaf5eaa1b2d9f311b9c63dc6ec37cdac2cdc
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.md
@@ -0,0 +1,39 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+ShufflenetV1 (CVPR'2018)
+ +```bibtex +@inproceedings{zhang2018shufflenet, + title={Shufflenet: An extremely efficient convolutional neural network for mobile devices}, + author={Zhang, Xiangyu and Zhou, Xinyu and Lin, Mengxiao and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={6848--6856}, + year={2018} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_shufflenetv1](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv1_8xb64-210e_mpii-256x256.py) | 256x256 | 0.824 | 0.195 | [ckpt](https://download.openmmlab.com/mmpose/top_down/shufflenetv1/shufflenetv1_mpii_256x256-dcc1c896_20200925.pth) | [log](https://download.openmmlab.com/mmpose/top_down/shufflenetv1/shufflenetv1_mpii_256x256_20200925.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b9edecc42838b43aec08941d4d87c37c72d74de0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv1_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ShufflenetV1
+ Training Data: MPII
+ Name: td-hm_shufflenetv1_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.824
+ Mean@0.1: 0.195
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/shufflenetv1/shufflenetv1_mpii_256x256-dcc1c896_20200925.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.md b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..8ab7b026ba02ec179e07ec772f12b46966748fd9
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.md
@@ -0,0 +1,39 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+ShufflenetV2 (ECCV'2018)
+ +```bibtex +@inproceedings{ma2018shufflenet, + title={Shufflenet v2: Practical guidelines for efficient cnn architecture design}, + author={Ma, Ningning and Zhang, Xiangyu and Zheng, Hai-Tao and Sun, Jian}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={116--131}, + year={2018} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [pose_shufflenetv2](/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv2_8xb64-210e_mpii-256x256.py) | 256x256 | 0.828 | 0.205 | [ckpt](https://download.openmmlab.com/mmpose/top_down/shufflenetv2/shufflenetv2_mpii_256x256-4fb9df2d_20200925.pth) | [log](https://download.openmmlab.com/mmpose/top_down/shufflenetv2/shufflenetv2_mpii_256x256_20200925.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.yml b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..efa6e14f51b13c14c8a25b3929f0150e69a13589
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv2_8xb64-210e_mpii-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ShufflenetV2
+ Training Data: MPII
+ Name: td-hm_shufflenetv2_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.828
+ Mean@0.1: 0.205
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/shufflenetv2/shufflenetv2_mpii_256x256-4fb9df2d_20200925.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_cpm_8xb64-210e_mpii-368x368.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_cpm_8xb64-210e_mpii-368x368.py
new file mode 100644
index 0000000000000000000000000000000000000000..794c49420ab69ae202685bb70c6d8ec8e1b2a02b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_cpm_8xb64-210e_mpii-368x368.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(368, 368), heatmap_size=(46, 46), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='CPM',
+ in_channels=3,
+ out_channels=16,
+ feat_channels=128,
+ num_stages=6),
+ head=dict(
+ type='CPMHead',
+ in_channels=16,
+ out_channels=16,
+ num_stages=6,
+ deconv_out_channels=None,
+ final_layer=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb32-210e_mpii-384x384.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb32-210e_mpii-384x384.py
new file mode 100644
index 0000000000000000000000000000000000000000..e9546504e0d3ead0b6977c33a4172a2581532a7f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb32-210e_mpii-384x384.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(384, 384), heatmap_size=(96, 96), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=16,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..cd854a40a3f5d6def990488b5967058997d2348f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hourglass52_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=16,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..459f24f3bdbbdc4a93e43e16382b023d6ff76e50
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=16,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..5d47ed6fdc161e019c94b1ab64751a096a0d4537
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w32_dark-8xb64-210e_mpii-256x256.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..4e3fce96000a2ff5e1165a88a322e1cfd1226c0a
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,146 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..18b31539a33d542ae8a0f83b42835a7cf97ec5c2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_hrnet-w48_dark-8xb64-210e_mpii-256x256.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-18_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-18_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..bdab446f5038c6d86231d27284aee3b3723bea14
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-18_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,137 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(2, 4, 2),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-30_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-30_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..84089add2a0d2c6c7d7d8b75275cf097a9b68e7f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_litehrnet-30_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,137 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(3, 8, 3),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=16,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_mobilenetv2_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_mobilenetv2_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..41b9d3ba9ba964f34f1204d185e36dcbcb3821e0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_mobilenetv2_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://mobilenet_v2'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res101_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res101_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..def5d2fd1681262689afd40b20a0299e64118136
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res101_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res152_8xb32-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res152_8xb32-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..bf515d0d21e6796af7fc79fb39ec27cd0fb0c7b0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res152_8xb32-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res50_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res50_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..dee56ae77b0c7b7fa40690e712e7c7ad4648f279
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_res50_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d101_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d101_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..0cbf684e38c1358cd939621294765249e1e5d68e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d101_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet101_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d152_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d152_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..24653a9e56b982b150ced4157c486428a34f9d04
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d152_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet152_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d50_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d50_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..48bcfec5eb5017036168fae73396d809fcb3f567
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnetv1d50_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNetV1d',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://resnet50_v1d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnext152_8xb32-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnext152_8xb32-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..30afb101037cc31d9dd51ac02487e5ef749921c7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_resnext152_8xb32-210e_mpii-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeXt',
+ depth=152,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='mmcls://resnext152_32x4d'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet101_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet101_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..fb5c6b702c28300525db4137973889967af9d09c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet101_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet101-94250a77.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet50_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet50_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..c2f7723724b80d730f70d00f7649adb5935a10fc
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_scnet50_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet50-7ef0a199.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet101_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet101_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..56b7fccb2e121fdd9734f9a43963f7fe1cc7511c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet101_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet152_8xb32-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet152_8xb32-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..79bb29e4b34fba243bca0635df2d8548e19ed76b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet152_8xb32-210e_mpii-256x256.py
@@ -0,0 +1,116 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=152,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet50_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet50_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..257dc360ad1ea41cec56d57bd4de19a59146a7a5
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_seresnet50_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SEResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://se-resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv1_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv1_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..83eaca208f237d6eff8b7930e36bc91213af4fdf
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv1_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV1',
+ groups=3,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v1'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=960,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv2_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv2_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..cd05c23596c21c7aa2f491c7e95399f2ec1126c7
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/mpii/td-hm_shufflenetv2_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ShuffleNetV2',
+ widen_factor=1.0,
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://shufflenet_v2'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=16,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file='data/mpii/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.md b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.md
new file mode 100644
index 0000000000000000000000000000000000000000..5d26a103db205eca0a9466a2f362ed29b1c64d0f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.md
@@ -0,0 +1,55 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on PoseTrack2018 val with ground-truth bounding boxes
+
+| Arch | Input Size | Head | Shou | Elb | Wri | Hip | Knee | Ankl | Total | ckpt | log |
+| :--------------------------------------------------- | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :---: | :---------------------------------------------------: | :--------------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py) | 256x192 | 86.2 | 89.0 | 84.5 | 79.2 | 82.3 | 82.5 | 78.7 | 83.4 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192-1ee951c4_20201028.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192_20201028.log.json) |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py) | 384x288 | 87.1 | 89.0 | 85.1 | 80.2 | 80.6 | 82.8 | 79.6 | 83.7 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288-806f00a3_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288_20211130.log.json) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py) | 256x192 | 88.3 | 90.2 | 86.0 | 81.0 | 80.7 | 83.3 | 80.6 | 84.6 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192-b5d9b3f1_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192_20211130.log.json) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py) | 384x288 | 87.8 | 90.0 | 86.2 | 81.3 | 81.0 | 83.4 | 80.9 | 84.6 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288-5fd6d3ff_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288_20211130.log.json) |
+
+The models are first pre-trained on COCO dataset, and then fine-tuned on PoseTrack18.
+
+Results on PoseTrack2018 val with [MMDetection](https://github.com/open-mmlab/mmdetection) pre-trained [Cascade R-CNN](https://download.openmmlab.com/mmdetection/v2.0/cascade_rcnn/cascade_rcnn_x101_64x4d_fpn_20e_coco/cascade_rcnn_x101_64x4d_fpn_20e_coco_20200509_224357-051557b1.pth) (X-101-64x4d-FPN) human detector
+
+| Arch | Input Size | Head | Shou | Elb | Wri | Hip | Knee | Ankl | Total | ckpt | log |
+| :--------------------------------------------------- | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :---: | :---------------------------------------------------: | :--------------------------------------------------: |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py) | 256x192 | 78.0 | 82.9 | 79.5 | 73.8 | 76.9 | 76.6 | 70.2 | 76.9 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192-1ee951c4_20201028.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192_20201028.log.json) |
+| [pose_hrnet_w32](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py) | 384x288 | 79.9 | 83.6 | 80.4 | 74.5 | 74.8 | 76.1 | 70.5 | 77.3 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288-806f00a3_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288_20211130.log.json) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py) | 256x192 | 80.1 | 83.4 | 80.6 | 74.8 | 74.3 | 76.8 | 70.5 | 77.4 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192-b5d9b3f1_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192_20211130.log.json) |
+| [pose_hrnet_w48](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py) | 384x288 | 80.2 | 83.8 | 80.9 | 75.2 | 74.7 | 76.7 | 71.7 | 77.8 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288-5fd6d3ff_20211130.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288_20211130.log.json) |
+
+The models are first pre-trained on COCO dataset, and then fine-tuned on PoseTrack18.
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.yml b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a0dcc78f7c65b0e712caa6e4f4204bfc8a3d8626
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.yml
@@ -0,0 +1,154 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 78.7
+ Elb: 84.5
+ Head: 86.2
+ Hip: 82.3
+ Knee: 82.5
+ Shou: 89
+ Total: 83.4
+ Wri: 79.2
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192-1ee951c4_20201028.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 79.6
+ Elb: 84.5
+ Head: 87.1
+ Hip: 80.6
+ Knee: 82.8
+ Shou: 89
+ Total: 83.7
+ Wri: 80.2
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288-806f00a3_20211130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 79.6
+ Elb: 85.1
+ Head: 88.3
+ Hip: 80.6
+ Knee: 82.8
+ Shou: 90.2
+ Total: 84.6
+ Wri: 81
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192-b5d9b3f1_20211130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 80.6
+ Elb: 86.2
+ Head: 87.8
+ Hip: 81
+ Knee: 83.4
+ Shou: 90
+ Total: 84.6
+ Wri: 81.3
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288-5fd6d3ff_20211130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 70.2
+ Elb: 79.5
+ Head: 78.0
+ Hip: 76.9
+ Knee: 76.6
+ Shou: 82.9
+ Total: 76.9
+ Wri: 73.8
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_256x192-1ee951c4_20201028.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 70.5
+ Elb: 80.4
+ Head: 79.9
+ Hip: 74.8
+ Knee: 76.1
+ Shou: 83.6
+ Total: 77.3
+ Wri: 74.5
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_posetrack18_384x288-806f00a3_20211130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 70.4
+ Elb: 80.6
+ Head: 80.1
+ Hip: 74.3
+ Knee: 76.8
+ Shou: 83.4
+ Total: 77.4
+ Wri: 74.8
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_256x192-b5d9b3f1_20211130.pth
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: PoseTrack18
+ Name: td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 71.7
+ Elb: 80.9
+ Head: 80.2
+ Hip: 74.7
+ Knee: 76.7
+ Shou: 83.8
+ Total: 77.8
+ Wri: 75.2
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_posetrack18_384x288-5fd6d3ff_20211130.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.md b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.md
new file mode 100644
index 0000000000000000000000000000000000000000..86f476e5b7d0cbfef712e822d660ca6a91f78849
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.md
@@ -0,0 +1,58 @@
+
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on PoseTrack2018 val with ground-truth bounding boxes
+
+| Arch | Input Size | Head | Shou | Elb | Wri | Hip | Knee | Ankl | Total | ckpt | log |
+| :--------------------------------------------------- | :--------: | :--: | :--: | :--: | :--: | :--: | :--: | :--: | :---: | :---------------------------------------------------: | :--------------------------------------------------: |
+| [pose_resnet_50](/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_res50_8xb64-20e_posetrack18-256x192.py) | 256x192 | 86.5 | 87.7 | 82.5 | 75.8 | 80.1 | 78.8 | 74.2 | 81.2 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_posetrack18_256x192-a62807c7_20201028.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_posetrack18_256x192_20201028.log.json) |
+
+The models are first pre-trained on COCO dataset, and then fine-tuned on PoseTrack18.
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.yml b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.yml
new file mode 100644
index 0000000000000000000000000000000000000000..478ffa247e660611a0f4eca6dbf594188ff9b7c2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.yml
@@ -0,0 +1,22 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_res50_8xb64-20e_posetrack18-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: PoseTrack18
+ Name: td-hm_res50_8xb64-20e_posetrack18-256x192
+ Results:
+ - Dataset: PoseTrack18
+ Metrics:
+ Ankl: 74.2
+ Elb: 82.5
+ Head: 86.5
+ Hip: 80.1
+ Knee: 78.8
+ Shou: 87.7
+ Total: 81.2
+ Wri: 75.8
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_posetrack18_256x192-a62807c7_20201028.pth
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..fe8e385f1daac0ac4df7a805203a88e87f487730
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-256x192.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[10, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='posetrack18/Total AP', rule='greater', interval=1))
+
+# load from the pretrained model
+load_from = 'https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth' # noqa: E501
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'PoseTrack18Dataset'
+data_mode = 'topdown'
+data_root = 'data/posetrack18/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_val.json',
+ # comment `bbox_file` and '`filter_cfg` if use gt bbox for evaluation
+ bbox_file='data/posetrack18/annotations/'
+ 'posetrack18_val_human_detections.json',
+ filter_cfg=dict(bbox_score_thr=0.4),
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='PoseTrack18Metric',
+ ann_file=data_root + 'annotations/posetrack18_val.json',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..513207441068ff0dcf37a98e995d3be47baf4817
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w32_8xb64-20e_posetrack18-384x288.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[10, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='posetrack18/Total AP', rule='greater', interval=1))
+
+# load from the pretrained model
+load_from = 'https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-384x288-ca5956af_20220909.pth' # noqa: E501
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'PoseTrack18Dataset'
+data_mode = 'topdown'
+data_root = 'data/posetrack18/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_val.json',
+ # comment `bbox_file` and '`filter_cfg` if use gt bbox for evaluation
+ bbox_file='data/posetrack18/annotations/'
+ 'posetrack18_val_human_detections.json',
+ filter_cfg=dict(bbox_score_thr=0.4),
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='PoseTrack18Metric',
+ ann_file=data_root + 'annotations/posetrack18_val.json',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..cac23f14e47b4ba1f6ed5cb6c43ea6c11c5e89ad
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-256x192.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[10, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='posetrack18/Total AP', rule='greater', interval=1))
+
+# load from the pretrained model
+load_from = 'https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth' # noqa: E501
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'PoseTrack18Dataset'
+data_mode = 'topdown'
+data_root = 'data/posetrack18/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_val.json',
+ # comment `bbox_file` and '`filter_cfg` if use gt bbox for evaluation
+ bbox_file='data/posetrack18/annotations/'
+ 'posetrack18_val_human_detections.json',
+ filter_cfg=dict(bbox_score_thr=0.4),
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='PoseTrack18Metric',
+ ann_file=data_root + 'annotations/posetrack18_val.json',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ee99469fed8ae914e7aa91b3a32281f9f18ca1b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_hrnet-w48_8xb64-20e_posetrack18-384x288.py
@@ -0,0 +1,155 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[10, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='posetrack18/Total AP', rule='greater', interval=1))
+
+# load from the pretrained model
+load_from = 'https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-384x288-c161b7de_20220915.pth' # noqa: E501
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=17,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'PoseTrack18Dataset'
+data_mode = 'topdown'
+data_root = 'data/posetrack18/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_val.json',
+ # comment `bbox_file` and '`filter_cfg` if use gt bbox for evaluation
+ bbox_file='data/posetrack18/annotations/'
+ 'posetrack18_val_human_detections.json',
+ filter_cfg=dict(bbox_score_thr=0.4),
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='PoseTrack18Metric',
+ ann_file=data_root + 'annotations/posetrack18_val.json',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_res50_8xb64-20e_posetrack18-256x192.py b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_res50_8xb64-20e_posetrack18-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f8e529d120733235c82e8088cb983127cf35f95d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_heatmap/posetrack18/td-hm_res50_8xb64-20e_posetrack18-256x192.py
@@ -0,0 +1,126 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[10, 15],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='posetrack18/Total AP', rule='greater', interval=1))
+
+# load from the pretrained model
+load_from = 'https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_256x192-ec54d7f3_20200709.pth' # noqa: E501
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'PoseTrack18Dataset'
+data_mode = 'topdown'
+data_root = 'data/posetrack18/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/posetrack18_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='PoseTrack18Metric',
+ ann_file=data_root + 'annotations/posetrack18_val.json',
+)
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_probmap/coco/td-pm_ProbPose-small_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_probmap/coco/td-pm_ProbPose-small_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..72bb3d1b111a74336278ec2d77763abb0a131fba
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_probmap/coco/td-pm_ProbPose-small_8xb64-210e_coco-256x192.py
@@ -0,0 +1,218 @@
+COCO_ROOT = "PATH/TO/COCO/DATASET/"
+CropCOCO_ROOT = "PATH/TO/CropCOCO/DATASET/"
+
+TRAIN_BATCH_SIZE = 64
+TEST_BATCH_SIZE = 64
+INPUT_PADDING = 1.25
+
+COCO_NAME = "COCO"
+CropCOCO_NAME = "CropCOCO"
+
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+custom_imports = dict(
+ imports=['mmpose.engine.optim_wrappers.layer_decay_optim_wrapper'],
+ allow_failed_imports=False)
+
+optim_wrapper = dict(
+ optimizer=dict(
+ type='AdamW', lr=TRAIN_BATCH_SIZE/64*5e-5, betas=(0.9, 0.999), weight_decay=0.1),
+ paramwise_cfg=dict(
+ num_layers=12,
+ layer_decay_rate=0.8,
+ custom_keys={
+ 'bias': dict(decay_multi=0.0),
+ 'pos_embed': dict(decay_mult=0.0),
+ 'relative_position_bias_table': dict(decay_mult=0.0),
+ 'norm': dict(decay_mult=0.0),
+ },
+ ),
+ constructor='LayerDecayOptimWrapperConstructor',
+ clip_grad=dict(max_norm=1., norm_type=2),
+)
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='{}/AP'.format(COCO_NAME), rule='greater', max_keep_ckpts=1))
+
+# codec settings
+codec = dict(
+ type='ProbMap', input_size=(192, 256), heatmap_size=(48, 64), sigma=-1)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.VisionTransformer',
+ arch={
+ 'embed_dims': 384,
+ 'num_layers': 12,
+ 'num_heads': 12,
+ 'feedforward_channels': 384 * 4
+ },
+ img_size=(256, 192),
+ patch_size=16,
+ qkv_bias=True,
+ drop_path_rate=0.1,
+ with_cls_token=False,
+ out_type='featmap',
+ patch_cfg=dict(padding=2),
+ init_cfg=None
+ ),
+ head=dict(
+ type='ProbMapHead',
+ in_channels=384,
+ out_channels=17,
+ deconv_out_channels=(256, 256),
+ deconv_kernel_sizes=(4, 4),
+ keypoint_loss=dict(type='OKSHeatmapLoss', use_target_weight=True, smoothing_weight=0.05),
+ probability_loss=dict(type='BCELoss', use_target_weight=True, use_sigmoid=True),
+ visibility_loss=dict(type='BCELoss', use_target_weight=True, use_sigmoid=True),
+ oks_loss=dict(type='MSELoss', use_target_weight=True),
+ error_loss=dict(type='L1LogLoss', use_target_weight=True),
+ detach_probability=True,
+ detach_visibility=True,
+ normalize=1.0,
+ freeze_error=True,
+ freeze_oks=False,
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ # output_heatmaps=True,
+ ),
+ # freeze_backbone=False,
+ )
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True, input_padding=INPUT_PADDING),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', pad_to_aspect_ratio=False),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True, input_padding=INPUT_PADDING),
+ dict(type='PackPoseInputs')
+]
+
+# base dataset settings
+data_root = COCO_ROOT
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+
+coco_val = dict(
+ type="CocoDataset",
+ data_root=COCO_ROOT,
+ data_mode="topdown",
+ ann_file="annotations/person_keypoints_val2017.json",
+ test_mode=True,
+ pipeline=[],
+ data_prefix=dict(img="val2017/"),
+)
+coco_train = dict(
+ type="CocoDataset",
+ data_root=COCO_ROOT,
+ data_mode="topdown",
+ ann_file="annotations/person_keypoints_train2017.json",
+ test_mode=False,
+ pipeline=train_pipeline,
+ data_prefix=dict(img="train2017/"),
+)
+CropCOCO_val = dict(
+ type="CocoCropDataset",
+ data_root=CropCOCO_ROOT,
+ data_mode="topdown",
+ ann_file="annotations/person_keypoints_val2017.json",
+ test_mode=True,
+ pipeline=[],
+ data_prefix=dict(img="val2017/"),
+)
+combined_val_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco.py'),
+ datasets=[CropCOCO_val, coco_val],
+ pipeline=val_pipeline,
+ test_mode=True,
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=TRAIN_BATCH_SIZE,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=coco_train,
+)
+val_dataloader = dict(
+ batch_size=TEST_BATCH_SIZE,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=combined_val_dataset,
+)
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='MultiDatasetEvaluator',
+ metrics=[
+ dict(type='CocoMetric',
+ ann_file=CropCOCO_ROOT + 'annotations/person_keypoints_val2017.json',
+ prefix=CropCOCO_NAME,
+ extended=[False, True],
+ match_by_bbox=[False, False],
+ ignore_border_points=[False, False],
+ padding=INPUT_PADDING,
+ score_thresh_type='prob',
+ keypoint_score_thr=0.45,
+ ),
+ dict(type='CocoMetric',
+ ann_file=COCO_ROOT + 'annotations/person_keypoints_val2017.json',
+ prefix=COCO_NAME,
+ extended=[False, True],
+ match_by_bbox=[False, False],
+ ignore_border_points=[False, False],
+ padding=INPUT_PADDING,
+ score_thresh_type='prob',
+ keypoint_score_thr=0.45,
+ )
+ ],
+ datasets=combined_val_dataset['datasets'],
+ )
+test_evaluator = val_evaluator
+
diff --git a/configs/body_2d_keypoint/topdown_regression/README.md b/configs/body_2d_keypoint/topdown_regression/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..adc278ce0e5363f1c7afdaac6ee6d3b05ef3a9d3
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/README.md
@@ -0,0 +1,32 @@
+# Top-down regression-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. At the 2nd stage, regression based methods directly regress the keypoint coordinates given the features extracted from the bounding box area, following the paradigm introduced in [Deeppose: Human pose estimation via deep neural networks](http://openaccess.thecvf.com/content_cvpr_2014/html/Toshev_DeepPose_Human_Pose_2014_CVPR_paper.html).
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+ +
+
+
+## Results and Models
+
+### COCO Dataset
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | AP | AR | Details and Download |
+| :--------------: | :--------: | :---: | :---: | :-------------------------------------------------------: |
+| ResNet-152+RLE | 256x192 | 0.731 | 0.805 | [resnet_rle_coco.md](./coco/resnet_rle_coco.md) |
+| ResNet-101+RLE | 256x192 | 0.722 | 0.768 | [resnet_rle_coco.md](./coco/resnet_rle_coco.md) |
+| ResNet-50+RLE | 256x192 | 0.706 | 0.768 | [resnet_rle_coco.md](./coco/resnet_rle_coco.md) |
+| MobileNet-v2+RLE | 256x192 | 0.593 | 0.644 | [mobilenetv2_rle_coco.md](./coco/mobilenetv2_rle_coco.md) |
+| ResNet-152 | 256x192 | 0.584 | 0.688 | [resnet_coco.md](./coco/resnet_coco.md) |
+| ResNet-101 | 256x192 | 0.562 | 0.670 | [resnet_coco.md](./coco/resnet_coco.md) |
+| ResNet-50 | 256x192 | 0.528 | 0.639 | [resnet_coco.md](./coco/resnet_coco.md) |
+
+### MPII Dataset
+
+| Model | Input Size | PCKh@0.5 | PCKh@0.1 | Details and Download |
+| :-----------: | :--------: | :------: | :------: | :---------------------------------------------: |
+| ResNet-50+RLE | 256x256 | 0.861 | 0.277 | [resnet_rle_mpii.md](./mpii/resnet_rle_mpii.md) |
+| ResNet-152 | 256x256 | 0.850 | 0.208 | [resnet_mpii.md](./mpii/resnet_mpii.md) |
+| ResNet-101 | 256x256 | 0.841 | 0.200 | [resnet_mpii.md](./mpii/resnet_mpii.md) |
+| ResNet-50 | 256x256 | 0.826 | 0.180 | [resnet_mpii.md](./mpii/resnet_mpii.md) |
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.md b/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..eddf5a79d31d974bf9a0e1d0fe128b32f5fa6065
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.md
@@ -0,0 +1,74 @@
+
+
+
+
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+RLE (ICCV'2021)
+ +```bibtex +@inproceedings{li2021human, + title={Human pose regression with residual log-likelihood estimation}, + author={Li, Jiefeng and Bian, Siyuan and Zeng, Ailing and Wang, Can and Pang, Bo and Liu, Wentao and Lu, Cewu}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11025--11034}, + year={2021} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [deeppose_mobilenetv2_rle_pretrained](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192.py) | 256x192 | 0.593 | 0.836 | 0.660 | 0.644 | 0.877 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192-39b73bd5_20220922.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192-39b73bd5_20220922.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.yml b/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c0f470432b444bdc5dced66291bc91d7a8bd18a2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.yml
@@ -0,0 +1,20 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192.py
+ In Collection: RLE
+ Metadata:
+ Architecture: &id001
+ - DeepPose
+ - RLE
+ - MobileNet
+ Training Data: COCO
+ Name: td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.593
+ AP@0.5: 0.836
+ AP@0.75: 0.66
+ AR: 0.644
+ AR@0.5: 0.877
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192-39b73bd5_20220922.pth
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.md b/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..77ed459aeda6a43d01b0219812c90509b8414282
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.md
@@ -0,0 +1,59 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [deeppose_resnet_50](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py) | 256x192 | 0.541 | 0.824 | 0.601 | 0.649 | 0.893 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192-72ef04f3_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192-72ef04f3_20220913.log.json) |
+| [deeppose_resnet_101](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_8xb64-210e_coco-256x192.py) | 256x192 | 0.562 | 0.831 | 0.629 | 0.670 | 0.900 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192-2f247111_20210205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192_20210205.log.json) |
+| [deeppose_resnet_152](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_8xb64-210e_coco-256x192.py) | 256x192 | 0.584 | 0.842 | 0.659 | 0.688 | 0.907 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192-7df89a88_20210205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192_20210205.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.yml b/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..e66b3043c6dfe8f9171e21b31cb6d3ae6d283932
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.yml
@@ -0,0 +1,57 @@
+Collections:
+- Name: DeepPose
+ Paper:
+ Title: "Deeppose: Human pose estimation via deep neural networks"
+ URL: http://openaccess.thecvf.com/content_cvpr_2014/html/Toshev_DeepPose_Human_Pose_2014_CVPR_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/deeppose.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: &id001
+ - DeepPose
+ - ResNet
+ Training Data: COCO
+ Name: td-reg_res50_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.541
+ AP@0.5: 0.824
+ AP@0.75: 0.601
+ AR: 0.649
+ AR@0.5: 0.893
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192-72ef04f3_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_8xb64-210e_coco-256x192.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res101_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.562
+ AP@0.5: 0.831
+ AP@0.75: 0.629
+ AR: 0.67
+ AR@0.5: 0.9
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192-2f247111_20210205.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_8xb64-210e_coco-256x192.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res152_8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.584
+ AP@0.5: 0.842
+ AP@0.75: 0.659
+ AR: 0.688
+ AR@0.5: 0.907
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192-7df89a88_20210205.pth
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.md b/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..d3f4f5a2883ef69ddbfd11921a630758151a0be2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.md
@@ -0,0 +1,78 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+RLE (ICCV'2021)
+ +```bibtex +@inproceedings{li2021human, + title={Human pose regression with residual log-likelihood estimation}, + author={Li, Jiefeng and Bian, Siyuan and Zeng, Ailing and Wang, Can and Pang, Bo and Liu, Wentao and Lu, Cewu}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11025--11034}, + year={2021} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [deeppose_resnet_50_rle](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192.py) | 256x192 | 0.706 | 0.888 | 0.776 | 0.753 | 0.924 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192-d37efd64_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192-d37efd64_20220913.log.json) |
+| [deeppose_resnet_50_rle_pretrained](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192.py) | 256x192 | 0.719 | 0.891 | 0.788 | 0.764 | 0.925 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192-2cb494ee_20220913.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192-2cb494ee_20220913.log.json) |
+| [deeppose_resnet_101_rle](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_rle-8xb64-210e_coco-256x192.py) | 256x192 | 0.722 | 0.894 | 0.794 | 0.768 | 0.930 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192_rle-16c3d461_20220615.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192_rle_20220615.log.json) |
+| [deeppose_resnet_152_rle](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-256x192.py) | 256x192 | 0.731 | 0.897 | 0.805 | 0.777 | 0.933 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192_rle-c05bdccf_20220615.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192_rle_20220615.log.json) |
+| [deeppose_resnet_152_rle](/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-384x288.py) | 384x288 | 0.749 | 0.901 | 0.815 | 0.793 | 0.935 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_384x288_rle-b77c4c37_20220624.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_384x288_rle_20220624.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.yml b/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..97ae41b8f2af552b5f0e77264baf86f308912ecc
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.yml
@@ -0,0 +1,90 @@
+Collections:
+- Name: RLE
+ Paper:
+ Title: Human pose regression with residual log-likelihood estimation
+ URL: https://arxiv.org/abs/2107.11291
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/rle.md
+Models:
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192.py
+ In Collection: RLE
+ Metadata:
+ Architecture: &id001
+ - DeepPose
+ - RLE
+ - ResNet
+ Training Data: COCO
+ Name: td-reg_res50_rle-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.706
+ AP@0.5: 0.888
+ AP@0.75: 0.776
+ AR: 0.753
+ AR@0.5: 0.924
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192-d37efd64_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192.py
+ In Collection: RLE
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.719
+ AP@0.5: 0.891
+ AP@0.75: 0.788
+ AR: 0.764
+ AR@0.5: 0.925
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192-2cb494ee_20220913.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_rle-8xb64-210e_coco-256x192.py
+ In Collection: RLE
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res101_rle-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.722
+ AP@0.5: 0.894
+ AP@0.75: 0.794
+ AR: 0.768
+ AR@0.5: 0.93
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_coco_256x192_rle-16c3d461_20220615.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-256x192.py
+ In Collection: RLE
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res152_rle-8xb64-210e_coco-256x192
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.731
+ AP@0.5: 0.897
+ AP@0.75: 0.805
+ AR: 0.777
+ AR@0.5: 0.933
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_256x192_rle-c05bdccf_20220615.pth
+- Config: configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-384x288.py
+ In Collection: RLE
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: td-reg_res152_rle-8xb64-210e_coco-384x288
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.749
+ AP@0.5: 0.901
+ AP@0.75: 0.815
+ AR: 0.793
+ AR@0.5: 0.935
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_coco_384x288_rle-b77c4c37_20220624.pth
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..97f5d926c66be84ef1bc8fb8f1f187730cebd46d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_mobilenetv2_rle-pretrained-8xb64-210e_coco-256x192.py
@@ -0,0 +1,126 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/top_down/'
+ 'mobilenetv2/mobilenetv2_coco_256x192-d1e58e7b_20200727.pth')),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=1280,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ),
+)
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..94f35d0fc36c749638ff397f5af5eb50a006894f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_8xb64-210e_coco-256x192.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_rle-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_rle-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..21b4a3cdcbab80fa080ca90581a6ab3ee44fdbe4
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res101_rle-8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..fa56fba4987e9f4c6c4f0e284e5949c0c6f46d6c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_8xb64-210e_coco-256x192.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e2a832b652b33aaa629fdb4a07863f223051461f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-384x288.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..6d319e927eb21ddcb71e40ecae1050c3421871d2
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res152_rle-8xb64-210e_coco-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(288, 384))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..fa7e487acf470dfbd988979ffb7570f72d409df0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..db530f6ec4f065fa16228ee66fee33db5afddc4f
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-8xb64-210e_coco-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192.py b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b74aba7f3c138901d35652c9b7f19bebf23cceb
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_rle-pretrained-8xb64-210e_coco-256x192.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=1e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=train_cfg['max_epochs'],
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/td-hm_res50_8xb64-210e_coco-256x192.pth'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/person_keypoints_val2017.json',
+ bbox_file=f'{data_root}person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='coco/AP', rule='greater'))
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=f'{data_root}annotations/person_keypoints_val2017.json',
+ score_mode='bbox_rle')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.md b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..150fd48020f0e47e63e5e2356bc91ae29499c546
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.md
@@ -0,0 +1,58 @@
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [deeppose_resnet_50](/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_8xb64-210e_mpii-256x256.py) | 256x256 | 0.826 | 0.180 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256-c63cd0b6_20210203.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256_20210203.log.json) |
+| [deeppose_resnet_101](/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res101_8xb64-210e_mpii-256x256.py) | 256x256 | 0.841 | 0.200 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_mpii_256x256-87516a90_20210205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_mpii_256x256_20210205.log.json) |
+| [deeppose_resnet_152](/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res152_8xb64-210e_mpii-256x256.py) | 256x256 | 0.850 | 0.208 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_mpii_256x256-15f5e6f9_20210205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_mpii_256x256_20210205.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.yml b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a744083e97a054b07c89b0d283189ef51f236bf0
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.yml
@@ -0,0 +1,42 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_8xb64-210e_mpii-256x256.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: &id001
+ - DeepPose
+ - ResNet
+ Training Data: MPII
+ Name: td-reg_res50_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.826
+ Mean@0.1: 0.18
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256-c63cd0b6_20210203.pth
+- Config: configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res101_8xb64-210e_mpii-256x256.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-reg_res101_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.841
+ Mean@0.1: 0.2
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res101_mpii_256x256-87516a90_20210205.pth
+- Config: configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res152_8xb64-210e_mpii-256x256.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture: *id001
+ Training Data: MPII
+ Name: td-reg_res152_8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.85
+ Mean@0.1: 0.208
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res152_mpii_256x256-15f5e6f9_20210205.pth
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.md b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..bf3a67a49a41be72076fa2831902aa194d17d346
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.md
@@ -0,0 +1,73 @@
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+RLE (ICCV'2021)
+ +```bibtex +@inproceedings{li2021human, + title={Human pose regression with residual log-likelihood estimation}, + author={Li, Jiefeng and Bian, Siyuan and Zeng, Ailing and Wang, Can and Pang, Bo and Liu, Wentao and Lu, Cewu}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11025--11034}, + year={2021} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on MPII val set
+
+| Arch | Input Size | Mean | Mean@0.1 | ckpt | log |
+| :---------------------------------------------------------- | :--------: | :---: | :------: | :---------------------------------------------------------: | :---------------------------------------------------------: |
+| [deeppose_resnet_50_rle](/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_rle-8xb64-210e_mpii-256x256.py) | 256x256 | 0.861 | 0.277 | [ckpt](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256_rle-5f92a619_20220504.pth) | [log](https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256_rle_20220504.log.json) |
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.yml b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a03586d42cd7690154d336444e948ea317dbfc9c
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_rle-8xb64-210e_mpii-256x256.py
+ In Collection: RLE
+ Metadata:
+ Architecture:
+ - DeepPose
+ - RLE
+ - ResNet
+ Training Data: MPII
+ Name: td-reg_res50_rle-8xb64-210e_mpii-256x256
+ Results:
+ - Dataset: MPII
+ Metrics:
+ Mean: 0.861
+ Mean@0.1: 0.277
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/deeppose/deeppose_res50_mpii_256x256_rle-5f92a619_20220504.pth
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res101_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res101_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c7821f91b1161491ad2166b36bd582e194f384b
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res101_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,116 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=16,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res152_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res152_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..c1a19b0d6e720c9f60e19d62a8712e532390cc84
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res152_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,118 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=16,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+file_client_args = dict(backend='disk')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', file_client_args=file_client_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', file_client_args=file_client_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..901fd4b8d61c2aa7a5cc920d1590acf8a4ece88d
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_8xb64-210e_mpii-256x256.py
@@ -0,0 +1,116 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=16,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_rle-8xb64-210e_mpii-256x256.py b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_rle-8xb64-210e_mpii-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..9d46484755dec533fe5519a782de86404bf9986e
--- /dev/null
+++ b/configs/body_2d_keypoint/topdown_regression/mpii/td-reg_res50_rle-8xb64-210e_mpii-256x256.py
@@ -0,0 +1,116 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=16,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'MpiiDataset'
+data_mode = 'topdown'
+data_root = 'data/mpii/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform', shift_prob=0),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/mpii_val.json',
+ headbox_file=f'{data_root}/annotations/mpii_gt_val.mat',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='PCK', rule='greater'))
+
+# evaluators
+val_evaluator = dict(type='MpiiPCKAccuracy')
+test_evaluator = val_evaluator
diff --git a/configs/body_2d_keypoint/yoloxpose/README.md b/configs/body_2d_keypoint/yoloxpose/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..8195b1e23673183aedee37f4b060d05f792e885e
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/README.md
@@ -0,0 +1,22 @@
+# YOLO-Pose: Enhancing YOLO for Multi Person Pose Estimation Using Object Keypoint Similarity Loss
+
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+YOLO-Pose is a bottom-up pose estimation approach that simultaneously detects all person instances and regresses keypoint locations in a single pass.
+
+We implement **YOLOX-Pose** based on the **YOLOX** object detection framework and inherits the benefits of unified pose estimation and object detection from YOLO-pose. To predict keypoint locations more accurately, separate branches with adaptive convolutions are used to regress the offsets for different joints. This allows optimizing the feature extraction for each keypoint.
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.md b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..fc98239e135dc4ee82038e4a09bcb40c7ddd923a
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.md
@@ -0,0 +1,59 @@
+
+
+YOLO-Pose (CVPRW'2022)
+ +```bibtex +@inproceedings{maji2022yolo, + title={Yolo-pose: Enhancing yolo for multi person pose estimation using object keypoint similarity loss}, + author={Maji, Debapriya and Nagori, Soyeb and Mathew, Manu and Poddar, Deepak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={2637--2646}, + year={2022} +} +``` + +
+
+
+
+
+YOLO-Pose (CVPRW'2022)
+ +```bibtex +@inproceedings{maji2022yolo, + title={Yolo-pose: Enhancing yolo for multi person pose estimation using object keypoint similarity loss}, + author={Maji, Debapriya and Nagori, Soyeb and Mathew, Manu and Poddar, Deepak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={2637--2646}, + year={2022} +} +``` + +
+
+
+
+
+YOLOX
+ +```bibtex +@article{ge2021yolox, + title={Yolox: Exceeding yolo series in 2021}, + author={Ge, Zheng and Liu, Songtao and Wang, Feng and Li, Zeming and Sun, Jian}, + journal={arXiv preprint arXiv:2107.08430}, + year={2021} +} +``` + +
+
+
+Results on COCO val2017
+
+| Arch | Input Size | AP | AP50 | AP75 | AR | AR50 | ckpt | log |
+| :-------------------------------------------- | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :-------------------------------------------: | :-------------------------------------------: |
+| [yoloxpose_tiny](/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_tiny_4xb64-300e_coco-416.py) | 416x416 | 0.526 | 0.793 | 0.556 | 0.571 | 0.833 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_tiny_4xb64-300e_coco-416-76eb44ca_20230829.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_tiny_4xb64-300e_coco-416-20230829.json) |
+| [yoloxpose_s](/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_s_8xb32-300e_coco-640.py) | 640x640 | 0.641 | 0.872 | 0.702 | 0.682 | 0.902 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_s_8xb32-300e_coco-640-56c79c1f_20230829.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_s_8xb32-300e_coco-640-20230829.json) |
+| [yoloxpose_m](/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_m_8xb32-300e_coco-640.py) | 640x640 | 0.695 | 0.899 | 0.766 | 0.733 | 0.926 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_m_8xb32-300e_coco-640-84e9a538_20230829.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_m_8xb32-300e_coco-640-20230829.json) |
+| [yoloxpose_l](/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_l_8xb32-300e_coco-640.py) | 640x640 | 0.712 | 0.901 | 0.782 | 0.749 | 0.926 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_l_8xb32-300e_coco-640-de0f8dee_20230829.pth) | [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_l_8xb32-300e_coco-640-20230829.json) |
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.yml b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.yml
new file mode 100644
index 0000000000000000000000000000000000000000..378ae5dbfefce0821645147a971842142bbd1570
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.yml
@@ -0,0 +1,72 @@
+Collections:
+- Name: YOLOXPose
+ Paper:
+ Title: 'YOLO-Pose: Enhancing YOLO for Multi Person Pose Estimation Using Object Keypoint Similarity Loss'
+ URL: https://arxiv.org/abs/2204.06806
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/algorithms/yolopose.md
+Models:
+- Config: configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_tiny_4xb64-300e_coco-416.py
+ In Collection: YOLOXPose
+ Metadata:
+ Architecture: &id001
+ - YOLOXPose
+ Training Data: COCO
+ Name: yoloxpose_tiny_4xb64-300e_coco-416
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.526
+ AP@0.5: 0.793
+ AP@0.75: 0.556
+ AR: 0.571
+ AR@0.5: 0.833
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_tiny_4xb64-300e_coco-416-76eb44ca_20230829.pth
+- Config: configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_s_8xb32-300e_coco-640.py
+ In Collection: YOLOXPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: yoloxpose_s_8xb32-300e_coco-640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.641
+ AP@0.5: 0.872
+ AP@0.75: 0.702
+ AR: 0.682
+ AR@0.5: 0.902
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_s_8xb32-300e_coco-640-56c79c1f_20230829.pth
+- Config: configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_m_8xb32-300e_coco-640.py
+ In Collection: YOLOXPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: yoloxpose_m_8xb32-300e_coco-640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.695
+ AP@0.5: 0.899
+ AP@0.75: 0.766
+ AR: 0.733
+ AR@0.5: 0.926
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_m_8xb32-300e_coco-640-84e9a538_20230829.pth
+- Config: configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_l_8xb32-300e_coco-640.py
+ In Collection: YOLOXPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO
+ Name: yoloxpose_l_8xb32-300e_coco-640
+ Results:
+ - Dataset: COCO
+ Metrics:
+ AP: 0.712
+ AP@0.5: 0.901
+ AP@0.75: 0.782
+ AR: 0.749
+ AR@0.5: 0.926
+ Task: Body 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/yolox_pose/yoloxpose_l_8xb32-300e_coco-640-de0f8dee_20230829.pth
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_l_8xb32-300e_coco-640.py b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_l_8xb32-300e_coco-640.py
new file mode 100644
index 0000000000000000000000000000000000000000..db61ea854ac674b9d5e441e5620cca6042f0a3aa
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_l_8xb32-300e_coco-640.py
@@ -0,0 +1,17 @@
+_base_ = './yoloxpose_s_8xb32-300e_coco-640.py'
+
+widen_factor = 1
+deepen_factor = 1
+checkpoint = 'https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_' \
+ 'l_8x8_300e_coco/yolox_l_8x8_300e_coco_20211126_140236-d3bd2b23.pth'
+
+# model settings
+model = dict(
+ backbone=dict(
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ init_cfg=dict(checkpoint=checkpoint),
+ ),
+ neck=dict(
+ in_channels=[256, 512, 1024], out_channels=256, num_csp_blocks=3),
+ head=dict(head_module_cfg=dict(widen_factor=widen_factor)))
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_m_8xb32-300e_coco-640.py b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_m_8xb32-300e_coco-640.py
new file mode 100644
index 0000000000000000000000000000000000000000..1fa895bc54c05e47d713609313b5b8d43220765a
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_m_8xb32-300e_coco-640.py
@@ -0,0 +1,16 @@
+_base_ = './yoloxpose_s_8xb32-300e_coco-640.py'
+
+widen_factor = 0.75
+deepen_factor = 0.67
+checkpoint = 'https://download.openmmlab.com/mmpose/v1/pretrained_models/' \
+ 'yolox_m_8x8_300e_coco_20230829.pth'
+
+# model settings
+model = dict(
+ backbone=dict(
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ init_cfg=dict(checkpoint=checkpoint),
+ ),
+ neck=dict(in_channels=[192, 384, 768], out_channels=192, num_csp_blocks=2),
+ head=dict(head_module_cfg=dict(widen_factor=widen_factor)))
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_s_8xb32-300e_coco-640.py b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_s_8xb32-300e_coco-640.py
new file mode 100644
index 0000000000000000000000000000000000000000..948a916b06707cfc73c1c9f1ac97a9ef928e23c4
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_s_8xb32-300e_coco-640.py
@@ -0,0 +1,266 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(
+ _delete_=True,
+ type='EpochBasedTrainLoop',
+ max_epochs=300,
+ val_interval=10,
+ dynamic_intervals=[(280, 1)])
+
+auto_scale_lr = dict(base_batch_size=256)
+
+default_hooks = dict(
+ checkpoint=dict(type='CheckpointHook', interval=10, max_keep_ckpts=3))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.004, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0,
+ bias_decay_mult=0,
+ bypass_duplicate=True,
+ ),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+param_scheduler = [
+ dict(
+ type='QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0002,
+ begin=5,
+ T_max=280,
+ end=280,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=280, end=300),
+]
+
+# model
+widen_factor = 0.5
+deepen_factor = 0.33
+
+model = dict(
+ type='BottomupPoseEstimator',
+ init_cfg=dict(
+ type='Kaiming',
+ layer='Conv2d',
+ a=2.23606797749979,
+ distribution='uniform',
+ mode='fan_in',
+ nonlinearity='leaky_relu'),
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ pad_size_divisor=32,
+ mean=[0, 0, 0],
+ std=[1, 1, 1],
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ out_indices=(2, 3, 4),
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v2.0/'
+ 'yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_'
+ '20211121_095711-4592a793.pth',
+ prefix='backbone.',
+ )),
+ neck=dict(
+ type='YOLOXPAFPN',
+ in_channels=[128, 256, 512],
+ out_channels=128,
+ num_csp_blocks=1,
+ use_depthwise=False,
+ upsample_cfg=dict(scale_factor=2, mode='nearest'),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ head=dict(
+ type='YOLOXPoseHead',
+ num_keypoints=17,
+ featmap_strides=(8, 16, 32),
+ head_module_cfg=dict(
+ num_classes=1,
+ in_channels=256,
+ feat_channels=256,
+ widen_factor=widen_factor,
+ stacked_convs=2,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ prior_generator=dict(
+ type='MlvlPointGenerator', offset=0, strides=[8, 16, 32]),
+ assigner=dict(type='SimOTAAssigner', dynamic_k_indicator='oks'),
+ overlaps_power=0.5,
+ loss_cls=dict(type='BCELoss', reduction='sum', loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_obj=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='sum',
+ loss_weight=1.0),
+ loss_oks=dict(
+ type='OKSLoss',
+ reduction='none',
+ metainfo='configs/_base_/datasets/coco.py',
+ norm_target_weight=True,
+ loss_weight=30.0),
+ loss_vis=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ reduction='mean',
+ loss_weight=1.0),
+ loss_bbox_aux=dict(type='L1Loss', reduction='sum', loss_weight=1.0),
+ ),
+ test_cfg=dict(
+ score_thr=0.01,
+ nms_thr=0.65,
+ ))
+
+# data
+input_size = (640, 640)
+codec = dict(type='YOLOXPoseAnnotationProcessor', input_size=input_size)
+
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=(640, 640),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(
+ type='YOLOXMixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+train_pipeline_stage2 = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=(640, 640),
+ shift_prob=0,
+ rotate_prob=0,
+ scale_prob=0,
+ scale_type='long',
+ pad_val=(114, 114, 114),
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs'),
+]
+
+data_mode = 'bottomup'
+data_root = 'data/'
+
+dataset_coco = dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ filter_cfg=dict(filter_empty_gt=False, min_size=32),
+ ann_file='coco/annotations/person_keypoints_train2017.json',
+ data_prefix=dict(img='coco/train2017/'),
+ pipeline=train_pipeline_stage1,
+)
+
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=8,
+ persistent_workers=True,
+ pin_memory=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dataset_coco)
+
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ pin_memory=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/person_keypoints_val2017.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json',
+ score_mode='bbox',
+ nms_mode='none',
+)
+test_evaluator = val_evaluator
+
+custom_hooks = [
+ dict(
+ type='YOLOXPoseModeSwitchHook',
+ num_last_epochs=20,
+ new_train_pipeline=train_pipeline_stage2,
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ strict_load=False,
+ priority=49),
+]
diff --git a/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_tiny_4xb64-300e_coco-416.py b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_tiny_4xb64-300e_coco-416.py
new file mode 100644
index 0000000000000000000000000000000000000000..d13d104e02bbff1497bb1629ff94b0172672984e
--- /dev/null
+++ b/configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_tiny_4xb64-300e_coco-416.py
@@ -0,0 +1,77 @@
+_base_ = './yoloxpose_s_8xb32-300e_coco-640.py'
+
+# model settings
+widen_factor = 0.375
+deepen_factor = 0.33
+checkpoint = 'https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_' \
+ 'tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_20211124_171234-b4047906.pth'
+
+model = dict(
+ data_preprocessor=dict(batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(320, 640),
+ size_divisor=32,
+ interval=1),
+ ]),
+ backbone=dict(
+ deepen_factor=deepen_factor,
+ widen_factor=widen_factor,
+ init_cfg=dict(checkpoint=checkpoint),
+ ),
+ neck=dict(
+ in_channels=[96, 192, 384],
+ out_channels=96,
+ ),
+ head=dict(head_module_cfg=dict(widen_factor=widen_factor), ))
+
+# dataset settings
+train_pipeline_stage1 = [
+ dict(type='LoadImage', backend_args=None),
+ dict(
+ type='Mosaic',
+ img_scale=_base_.input_size,
+ pad_val=114.0,
+ pre_transform=[dict(type='LoadImage', backend_args=None)]),
+ dict(
+ type='BottomupRandomAffine',
+ input_size=_base_.input_size,
+ shift_factor=0.1,
+ rotate_factor=10,
+ scale_factor=(0.75, 1.0),
+ pad_val=114,
+ distribution='uniform',
+ transform_mode='perspective',
+ bbox_keep_corner=False,
+ clip_border=True,
+ ),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip'),
+ dict(type='FilterAnnotations', by_kpt=True, by_box=True, keep_empty=False),
+ dict(type='GenerateTarget', encoder=_base_.codec),
+ dict(
+ type='PackPoseInputs',
+ extra_mapping_labels={
+ 'bbox': 'bboxes',
+ 'bbox_labels': 'labels',
+ 'keypoints': 'keypoints',
+ 'keypoints_visible': 'keypoints_visible',
+ 'area': 'areas'
+ }),
+]
+train_dataloader = dict(
+ batch_size=64, dataset=dict(pipeline=train_pipeline_stage1))
+
+input_size = (416, 416)
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(
+ type='BottomupResize', input_size=input_size, pad_val=(114, 114, 114)),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'input_size', 'input_center', 'input_scale'))
+]
+
+val_dataloader = dict(dataset=dict(pipeline=val_pipeline, ))
+test_dataloader = val_dataloader
diff --git a/configs/body_3d_keypoint/README.md b/configs/body_3d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..61cacfb94f75ced615ddb25ae8f8f0489dca1527
--- /dev/null
+++ b/configs/body_3d_keypoint/README.md
@@ -0,0 +1,13 @@
+# Human Body 3D Pose Estimation
+
+3D pose estimation is the detection and analysis of X, Y, Z coordinates of human body joints from RGB images. For single-person 3D pose estimation from a monocular camera, existing works can be classified into three categories: (1) from 2D poses to 3D poses (2D-to-3D pose lifting) (2) jointly learning 2D and 3D poses, and (3) directly regressing 3D poses from images.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/3d_body_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/3d_human_pose_demo.md) to run demos.
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
diff --git a/configs/body_3d_keypoint/image_pose_lift/README.md b/configs/body_3d_keypoint/image_pose_lift/README.md new file mode 100644 index 0000000000000000000000000000000000000000..36b8bfe48699f4c7a1a109b8996f134b74b71c74 --- /dev/null +++ b/configs/body_3d_keypoint/image_pose_lift/README.md @@ -0,0 +1,13 @@ +# A simple yet effective baseline for 3d human pose estimation + +Simple 3D baseline proposes to break down the task of 3d human pose estimation into 2 stages: (1) Image → 2D pose (2) 2D pose → 3D pose. + +The authors find that "lifting" ground truth 2D joint locations to 3D space is a task that can be solved with a low error rate. Based on the success of 2d human pose estimation, it directly "lifts" 2d joint locations to 3d space. + +## Results and Models + +### Human3.6m Dataset + +| Arch | MPJPE | P-MPJPE | ckpt | log | Details and Download | +| :------------------------------------------ | :---: | :-----: | :-----------------------------------------: | :-----------------------------------------: | :---------------------------------------------------------: | +| [SimpleBaseline3D](/configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py) | 43.4 | 34.3 | [ckpt](https://download.openmmlab.com/mmpose/body3d/simple_baseline/simple3Dbaseline_h36m-f0ad73a4_20210419.pth) | [log](https://download.openmmlab.com/mmpose/body3d/simple_baseline/20210415_065056.log.json) | [simplebaseline3d_h36m.md](./h36m/simplebaseline3d_h36m.md) | diff --git a/configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py b/configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py new file mode 100644 index 0000000000000000000000000000000000000000..b3c1c2db806fc0c5b0a0d726f1ff066bb2bd1313 --- /dev/null +++ b/configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py @@ -0,0 +1,168 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +vis_backends = [ + dict(type='LocalVisBackend'), +] +visualizer = dict( + type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer') + +# runtime +train_cfg = dict(max_epochs=200, val_interval=10) + +# optimizer +optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-3)) + +# learning policy +param_scheduler = [ + dict(type='StepLR', step_size=100000, gamma=0.96, end=80, by_epoch=False) +] + +auto_scale_lr = dict(base_batch_size=512) + +# hooks +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + save_best='MPJPE', + rule='less', + max_keep_ckpts=1)) + +# codec settings +# 3D keypoint normalization parameters +# From file: '{data_root}/annotation_body3d/fps50/joint3d_rel_stats.pkl' +target_mean = [[-2.55652589e-04, -7.11960570e-03, -9.81433052e-04], + [-5.65463051e-03, 3.19636009e-01, 7.19329269e-02], + [-1.01705840e-02, 6.91147892e-01, 1.55352986e-01], + [2.55651315e-04, 7.11954606e-03, 9.81423866e-04], + [-5.09729780e-03, 3.27040413e-01, 7.22258095e-02], + [-9.99656606e-03, 7.08277383e-01, 1.58016408e-01], + [2.90583676e-03, -2.11363307e-01, -4.74210915e-02], + [5.67537804e-03, -4.35088906e-01, -9.76974016e-02], + [5.93884964e-03, -4.91891970e-01, -1.10666618e-01], + [7.37352083e-03, -5.83948619e-01, -1.31171400e-01], + [5.41920653e-03, -3.83931702e-01, -8.68145417e-02], + [2.95964662e-03, -1.87567488e-01, -4.34536934e-02], + [1.26585822e-03, -1.20170579e-01, -2.82526049e-02], + [4.67186639e-03, -3.83644089e-01, -8.55125784e-02], + [1.67648571e-03, -1.97007177e-01, -4.31368364e-02], + [8.70569015e-04, -1.68664569e-01, -3.73902498e-02]], +target_std = [[0.11072244, 0.02238818, 0.07246294], + [0.15856311, 0.18933832, 0.20880479], + [0.19179935, 0.24320062, 0.24756193], + [0.11072181, 0.02238805, 0.07246253], + [0.15880454, 0.19977188, 0.2147063], + [0.18001944, 0.25052739, 0.24853247], + [0.05210694, 0.05211406, 0.06908241], + [0.09515367, 0.10133032, 0.12899733], + [0.11742458, 0.12648469, 0.16465091], + [0.12360297, 0.13085539, 0.16433336], + [0.14602232, 0.09707956, 0.13952731], + [0.24347532, 0.12982249, 0.20230181], + [0.2446877, 0.21501816, 0.23938235], + [0.13876084, 0.1008926, 0.1424411], + [0.23687529, 0.14491219, 0.20980829], + [0.24400695, 0.23975028, 0.25520584]] +# 2D keypoint normalization parameters +# From file: '{data_root}/annotation_body3d/fps50/joint2d_stats.pkl' +keypoints_mean = [[532.08351635, 419.74137558], [531.80953144, 418.2607141], + [530.68456967, 493.54259285], [529.36968722, 575.96448516], + [532.29767646, 421.28483336], [531.93946631, 494.72186795], + [529.71984447, 578.96110365], [532.93699382, 370.65225054], + [534.1101856, 317.90342311], [534.55416813, 304.24143901], + [534.86955004, 282.31030885], [534.11308566, 330.11296796], + [533.53637525, 376.2742511], [533.49380107, 391.72324565], + [533.52579142, 330.09494668], [532.50804964, 374.190479], + [532.72786934, 380.61615716]], +keypoints_std = [[107.73640054, 63.35908715], [119.00836213, 64.1215443], + [119.12412107, 50.53806215], [120.61688045, 56.38444891], + [101.95735275, 62.89636486], [106.24832897, 48.41178119], + [108.46734966, 54.58177071], [109.07369806, 68.70443672], + [111.20130351, 74.87287863], [111.63203838, 77.80542514], + [113.22330788, 79.90670556], [105.7145833, 73.27049436], + [107.05804267, 73.93175781], [107.97449418, 83.30391802], + [121.60675105, 74.25691526], [134.34378973, 77.48125087], + [131.79990652, 89.86721124]] +codec = dict( + type='ImagePoseLifting', + num_keypoints=17, + root_index=0, + remove_root=True, + target_mean=target_mean, + target_std=target_std, + keypoints_mean=keypoints_mean, + keypoints_std=keypoints_std) + +# model settings +model = dict( + type='PoseLifter', + backbone=dict( + type='TCN', + in_channels=2 * 17, + stem_channels=1024, + num_blocks=2, + kernel_sizes=(1, 1, 1), + dropout=0.5, + ), + head=dict( + type='TemporalRegressionHead', + in_channels=1024, + num_joints=16, + loss=dict(type='MSELoss'), + decoder=codec, + )) + +# base dataset settings +dataset_type = 'Human36mDataset' +data_root = 'data/h36m/' + +# pipelines +train_pipeline = [ + dict(type='GenerateTarget', encoder=codec), + dict( + type='PackPoseInputs', + meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices', + 'target_root', 'target_root_index', 'target_mean', + 'target_std')) +] +val_pipeline = train_pipeline + +# data loaders +train_dataloader = dict( + batch_size=64, + num_workers=2, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + ann_file='annotation_body3d/fps50/h36m_train.npz', + seq_len=1, + causal=True, + keypoint_2d_src='gt', + data_root=data_root, + data_prefix=dict(img='images/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + ann_file='annotation_body3d/fps50/h36m_test.npz', + seq_len=1, + causal=True, + keypoint_2d_src='gt', + data_root=data_root, + data_prefix=dict(img='images/'), + pipeline=train_pipeline, + )) +test_dataloader = val_dataloader + +# evaluators +val_evaluator = [ + dict(type='MPJPE', mode='mpjpe'), + dict(type='MPJPE', mode='p-mpjpe') +] +test_evaluator = val_evaluator diff --git a/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.md b/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.md new file mode 100644 index 0000000000000000000000000000000000000000..0f741b90e3f65222576cf8bc110f1fe7528aa454 --- /dev/null +++ b/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.md @@ -0,0 +1,44 @@ + + +
+
+
+
+
+SimpleBaseline3D (ICCV'2017)
+ +```bibtex +@inproceedings{martinez_2017_3dbaseline, + title={A simple yet effective baseline for 3d human pose estimation}, + author={Martinez, Julieta and Hossain, Rayat and Romero, Javier and Little, James J.}, + booktitle={ICCV}, + year={2017} +} +``` + +
+
+
+Results on Human3.6M dataset with ground truth 2D detections
+
+| Arch | MPJPE | P-MPJPE | ckpt | log |
+| :-------------------------------------------------------------- | :---: | :-----: | :-------------------------------------------------------------: | :------------------------------------------------------------: |
+| [SimpleBaseline3D1](/configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py) | 43.4 | 34.3 | [ckpt](https://download.openmmlab.com/mmpose/body3d/simple_baseline/simple3Dbaseline_h36m-f0ad73a4_20210419.pth) | [log](https://download.openmmlab.com/mmpose/body3d/simple_baseline/20210415_065056.log.json) |
+
+1 Differing from the original paper, we didn't apply the `max-norm constraint` because we found this led to a better convergence and performance.
diff --git a/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.yml b/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.yml
new file mode 100644
index 0000000000000000000000000000000000000000..17894ee3b1d2e6058e92fe57d3c0bff02bcdc817
--- /dev/null
+++ b/configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.yml
@@ -0,0 +1,21 @@
+Collections:
+- Name: SimpleBaseline3D
+ Paper:
+ Title: A simple yet effective baseline for 3d human pose estimation
+ URL: http://openaccess.thecvf.com/content_iccv_2017/html/Martinez_A_Simple_yet_ICCV_2017_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/en/papers/algorithms/simplebaseline3d.md
+Models:
+- Config: configs/body_3d_keypoint/image_pose_lift/h36m/image-pose-lift_tcn_8xb64-200e_h36m.py
+ In Collection: SimpleBaseline3D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline3D
+ Training Data: Human3.6M
+ Name: image-pose-lift_tcn_8xb64-200e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 43.4
+ P-MPJPE: 34.3
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/simple_baseline/simple3Dbaseline_h36m-f0ad73a4_20210419.pth
diff --git a/configs/body_3d_keypoint/motionbert/README.md b/configs/body_3d_keypoint/motionbert/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..562ce7612a8975bcca6bfae668552eb1123b0ff8
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/README.md
@@ -0,0 +1,23 @@
+# MotionBERT: A Unified Perspective on Learning Human Motion Representations
+
+Motionbert proposes a pretraining stage in which a motion encoder is trained to recover the underlying 3D motion from noisy partial 2D observations. The motion representations acquired in this way incorporate geometric, kinematic, and physical knowledge about human motion, which can be easily transferred to multiple downstream tasks.
+
+## Results and Models
+
+### Human3.6m Dataset
+
+| Arch | MPJPE | P-MPJPE | ckpt | log | Details and Download |
+| :-------------------------------------------------------------------- | :---: | :-----: | :-------------------------------------------------------------------: | :-: | :---------------------------------------------: |
+| [MotionBERT\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py) | 35.3 | 27.7 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_h36m-f554954f_20230531.pth) | / | [motionbert_h36m.md](./h36m/motionbert_h36m.md) |
+| [MotionBERT-finetuned\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py) | 27.5 | 21.6 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth) | / | [motionbert_h36m.md](./h36m/motionbert_h36m.md) |
+
+### Human3.6m Dataset from official repo 1
+
+| Arch | MPJPE | Average MPJPE | P-MPJPE | ckpt | log | Details and Download |
+| :------------------------------------------------------------- | :---: | :-----------: | :-----: | :-------------------------------------------------------------: | :-: | :---------------------------------------------: |
+| [MotionBERT\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m-original.py) | 39.8 | 39.2 | 33.4 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_h36m-f554954f_20230531.pth) | / | [motionbert_h36m.md](./h36m/motionbert_h36m.md) |
+| [MotionBERT-finetuned\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m-original.py) | 37.7 | 37.2 | 32.2 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth) | / | [motionbert_h36m.md](./h36m/motionbert_h36m.md) |
+
+1 Please refer to the [doc](./h36m/motionbert_h36m.md) for more details.
+
+*Models with * are converted from the official repo. The config files of these models are only for validation. We don't ensure these config files' training accuracy and welcome you to contribute your reproduction results.*
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m-original.py b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m-original.py
new file mode 100644
index 0000000000000000000000000000000000000000..caf2e56530384f118062055711305881fa5505c2
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m-original.py
@@ -0,0 +1,137 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=240, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.01))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.99, end=120, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+train_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, mode='train')
+val_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, rootrel=True)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='DSTFormer',
+ in_channels=3,
+ feat_size=512,
+ depth=5,
+ num_heads=8,
+ mlp_ratio=2,
+ seq_len=243,
+ att_fuse=True,
+ ),
+ head=dict(
+ type='MotionRegressionHead',
+ in_channels=512,
+ out_channels=3,
+ embedding_size=512,
+ loss=dict(type='MPJPEVelocityJointLoss'),
+ decoder=val_codec,
+ ),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(type='GenerateTarget', encoder=train_codec),
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(center_mode='static', center_x=0.),
+ target_flip_cfg=dict(center_mode='static', center_x=0.),
+ flip_label=True),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=val_codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train_original.npz',
+ seq_len=1,
+ multiple_target=243,
+ multiple_target_step=81,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test_original.npz',
+ factor_file='annotation_body3d/fps50/h36m_factors.npy',
+ seq_len=1,
+ seq_step=1,
+ multiple_target=243,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+skip_list = [
+ 'S9_Greet', 'S9_SittingDown', 'S9_Wait_1', 'S9_Greeting', 'S9_Waiting_1'
+]
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe', skip_list=skip_list),
+ dict(type='MPJPE', mode='p-mpjpe', skip_list=skip_list)
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea91556198fd56f978e988311ad803a4a2193ab5
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py
@@ -0,0 +1,136 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=240, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.01))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.99, end=120, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+train_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, mode='train')
+val_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, rootrel=True)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='DSTFormer',
+ in_channels=3,
+ feat_size=512,
+ depth=5,
+ num_heads=8,
+ mlp_ratio=2,
+ seq_len=243,
+ att_fuse=True,
+ ),
+ head=dict(
+ type='MotionRegressionHead',
+ in_channels=512,
+ out_channels=3,
+ embedding_size=512,
+ loss=dict(type='MPJPEVelocityJointLoss'),
+ decoder=val_codec,
+ ),
+ test_cfg=dict(flip_test=True))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(type='GenerateTarget', encoder=train_codec),
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(center_mode='static', center_x=0.),
+ target_flip_cfg=dict(center_mode='static', center_x=0.),
+ flip_label=True),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=val_codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=1,
+ multiple_target=243,
+ multiple_target_step=81,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=1,
+ seq_step=1,
+ multiple_target=243,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+skip_list = [
+ 'S9_Greet', 'S9_SittingDown', 'S9_Wait_1', 'S9_Greeting', 'S9_Waiting_1'
+]
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe', skip_list=skip_list),
+ dict(type='MPJPE', mode='p-mpjpe', skip_list=skip_list)
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m-original.py b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m-original.py
new file mode 100644
index 0000000000000000000000000000000000000000..555fd8ae0e7b9a9a0b4e6b2743ff581f382096d6
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m-original.py
@@ -0,0 +1,142 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=120, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.01))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.99, end=60, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+train_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, mode='train')
+val_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, rootrel=True)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='DSTFormer',
+ in_channels=3,
+ feat_size=512,
+ depth=5,
+ num_heads=8,
+ mlp_ratio=2,
+ seq_len=243,
+ att_fuse=True,
+ ),
+ head=dict(
+ type='MotionRegressionHead',
+ in_channels=512,
+ out_channels=3,
+ embedding_size=512,
+ loss=dict(type='MPJPEVelocityJointLoss'),
+ decoder=val_codec,
+ ),
+ test_cfg=dict(flip_test=True),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/'
+ 'pose_lift/h36m/motionbert_pretrain_h36m-29ffebf5_20230719.pth'),
+)
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(type='GenerateTarget', encoder=train_codec),
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(center_mode='static', center_x=0.),
+ target_flip_cfg=dict(center_mode='static', center_x=0.),
+ flip_label=True),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=val_codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train_original.npz',
+ seq_len=1,
+ multiple_target=243,
+ multiple_target_step=81,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test_original.npz',
+ factor_file='annotation_body3d/fps50/h36m_factors.npy',
+ seq_len=1,
+ seq_step=1,
+ multiple_target=243,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+skip_list = [
+ 'S9_Greet', 'S9_SittingDown', 'S9_Wait_1', 'S9_Greeting', 'S9_Waiting_1'
+]
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe', skip_list=skip_list),
+ dict(type='MPJPE', mode='p-mpjpe', skip_list=skip_list)
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..256a765539674749d5fa5d67f33a4468454fe4b8
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py
@@ -0,0 +1,141 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=120, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.01))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.99, end=60, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+train_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, mode='train')
+val_codec = dict(
+ type='MotionBERTLabel', num_keypoints=17, concat_vis=True, rootrel=True)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='DSTFormer',
+ in_channels=3,
+ feat_size=512,
+ depth=5,
+ num_heads=8,
+ mlp_ratio=2,
+ seq_len=243,
+ att_fuse=True,
+ ),
+ head=dict(
+ type='MotionRegressionHead',
+ in_channels=512,
+ out_channels=3,
+ embedding_size=512,
+ loss=dict(type='MPJPEVelocityJointLoss'),
+ decoder=val_codec,
+ ),
+ test_cfg=dict(flip_test=True),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/'
+ 'pose_lift/h36m/motionbert_pretrain_h36m-29ffebf5_20230719.pth'),
+)
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(type='GenerateTarget', encoder=train_codec),
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(center_mode='static', center_x=0.),
+ target_flip_cfg=dict(center_mode='static', center_x=0.),
+ flip_label=True),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=val_codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'factor', 'camera_param'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=1,
+ multiple_target=243,
+ multiple_target_step=81,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ batch_size=32,
+ prefetch_factor=4,
+ pin_memory=True,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=1,
+ seq_step=1,
+ multiple_target=243,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+skip_list = [
+ 'S9_Greet', 'S9_SittingDown', 'S9_Wait_1', 'S9_Greeting', 'S9_Waiting_1'
+]
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe', skip_list=skip_list),
+ dict(type='MPJPE', mode='p-mpjpe', skip_list=skip_list)
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.md b/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.md
new file mode 100644
index 0000000000000000000000000000000000000000..8d8f1b57842ce27b0e56615b1a8dbaa3bf00558f
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.md
@@ -0,0 +1,55 @@
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+
+
+MotionBERT (2022)
+ +```bibtex + @misc{Zhu_Ma_Liu_Liu_Wu_Wang_2022, + title={Learning Human Motion Representations: A Unified Perspective}, + author={Zhu, Wentao and Ma, Xiaoxuan and Liu, Zhaoyang and Liu, Libin and Wu, Wayne and Wang, Yizhou}, + year={2022}, + month={Oct}, + language={en-US} + } +``` + +
+
+
+Results on Human3.6M dataset with ground truth 2D detections
+
+| Arch | MPJPE | average MPJPE | P-MPJPE | ckpt |
+| :-------------------------------------------------------------------------------------- | :---: | :-----------: | :-----: | :--------------------------------------------------------------------------------------: |
+| [MotionBERT\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py) | 34.5 | 34.6 | 27.1 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_h36m-f554954f_20230531.pth) |
+| [MotionBERT-finetuned\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py) | 26.9 | 26.8 | 21.0 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth) |
+
+Results on Human3.6M dataset converted from the [official repo](https://github.com/Walter0807/MotionBERT)1 with ground truth 2D detections
+
+| Arch | MPJPE | average MPJPE | P-MPJPE | ckpt | log |
+| :------------------------------------------------------------------------------------- | :---: | :-----------: | :-----: | :------------------------------------------------------------------------------------: | :-: |
+| [MotionBERT\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m-original.py) | 39.8 | 39.2 | 33.4 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_h36m-f554954f_20230531.pth) | / |
+| [MotionBERT-finetuned\*](/configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m-original.py) | 37.7 | 37.2 | 32.2 | [ckpt](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth) | / |
+
+1 By default, we test models with [Human 3.6m dataset](/docs/en/dataset_zoo/3d_body_keypoint.md#human3-6m) processed by MMPose. The official repo's dataset includes more data and applies a different pre-processing technique. To achieve the same result with the official repo, please download the [test annotation file](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/h36m_test_original.npz), [train annotation file](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/h36m_train_original.npz) and [factors](https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/h36m_factors.npy) under `$MMPOSE/data/h36m/annotation_body3d/fps50` and test with the configs we provided.
+
+*Models with * are converted from the [official repo](https://github.com/Walter0807/MotionBERT). The config files of these models are only for validation. We don't ensure these config files' training accuracy and welcome you to contribute your reproduction results.*
diff --git a/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.yml b/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2dc285426cee847d590b78714c1809a161d0378e
--- /dev/null
+++ b/configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.yml
@@ -0,0 +1,45 @@
+Collections:
+- Name: MotionBERT
+ Paper:
+ Title: "Learning Human Motion Representations: A Unified Perspective"
+ URL: https://arxiv.org/abs/2210.06551
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/en/papers/algorithms/motionbert.md
+Models:
+- Config: configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-243frm_8xb32-240e_h36m.py
+ In Collection: MotionBERT
+ Metadata:
+ Architecture: &id001
+ - MotionBERT
+ Training Data: Human3.6M (MotionBERT)
+ Name: motionbert_dstformer-243frm_8xb32-240e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 34.5
+ P-MPJPE: 27.1
+ Task: Body 3D Keypoint
+ - Dataset: Human3.6M (MotionBERT)
+ Metrics:
+ MPJPE: 39.8
+ P-MPJPE: 33.4
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_h36m-f554954f_20230531.pth
+- Config: configs/body_3d_keypoint/motionbert/h36m/motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py
+ In Collection: MotionBERT
+ Alias: human3d
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M (MotionBERT)
+ Name: motionbert_dstformer-ft-243frm_8xb32-120e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 26.9
+ P-MPJPE: 21.0
+ Task: Body 3D Keypoint
+ - Dataset: Human3.6M (MotionBERT)
+ Metrics:
+ MPJPE: 37.7
+ P-MPJPE: 32.2
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth
diff --git a/configs/body_3d_keypoint/video_pose_lift/README.md b/configs/body_3d_keypoint/video_pose_lift/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..faf92b789931fa9a6b9709b28c2271f077303c7a
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/README.md
@@ -0,0 +1,17 @@
+# 3D human pose estimation in video with temporal convolutions and semi-supervised training
+
+Based on the success of 2d human pose estimation, it directly "lifts" a sequence of 2d keypoints to 3d keypoints.
+
+## Results and Models
+
+### Human3.6m Dataset
+
+| Arch | MPJPE | P-MPJPE | N-MPJPE | ckpt | log | Details and Download |
+| :-------------------------------------------- | :---: | :-----: | :-----: | :-------------------------------------------: | :------------------------------------------: | :---------------------------------------------: |
+| [VideoPose3D-supervised-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py) | 40.1 | 30.1 | / | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_supervised-fe8fbba9_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_supervised_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-supervised-81frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py) | 39.1 | 29.3 | / | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_81frames_fullconv_supervised-1f2d1104_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_81frames_fullconv_supervised_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-supervised-243frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py) | 37.6 | 28.3 | / | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised-880bea25_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-supervised-CPN-1frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py) | 53.0 | 41.3 | / | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_1frame_fullconv_supervised_cpn_ft-5c3afaed_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_1frame_fullconv_supervised_cpn_ft_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-supervised-CPN-243frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py) | 47.9 | 38.0 | / | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft-88f5abbb_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-semi-supervised-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py) | 57.2 | 42.4 | 54.2 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised-54aef83b_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
+| [VideoPose3D-semi-supervised-CPN-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py) | 67.3 | 50.4 | 63.6 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_cpn_ft-71be9cde_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_cpn_ft_20210527.log.json) | [videpose3d_h36m.md](./h36m/videpose3d_h36m.md) |
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..c1190fe83ef95895726dadd9314db8907be9559e
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py
@@ -0,0 +1,132 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=160, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-4))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.98, end=80, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=4,
+ kernel_sizes=(1, 1, 1, 1, 1),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(),
+ target_flip_cfg=dict(),
+ ),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=1,
+ causal=False,
+ pad_video_seq=False,
+ keypoint_2d_src='detection',
+ keypoint_2d_det_file='joint_2d_det_files/cpn_ft_h36m_dbb_train.npy',
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ),
+)
+val_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=1,
+ causal=False,
+ pad_video_seq=False,
+ keypoint_2d_src='detection',
+ keypoint_2d_det_file='joint_2d_det_files/cpn_ft_h36m_dbb_test.npy',
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..3ef3df570b0bab3b66027c5c54acb0edd3ef694f
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py
@@ -0,0 +1,132 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=200, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-4))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.98, end=200, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=4,
+ kernel_sizes=(3, 3, 3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(),
+ target_flip_cfg=dict(),
+ ),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=243,
+ causal=False,
+ pad_video_seq=True,
+ keypoint_2d_src='detection',
+ keypoint_2d_det_file='joint_2d_det_files/cpn_ft_h36m_dbb_train.npy',
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ),
+)
+val_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=243,
+ causal=False,
+ pad_video_seq=True,
+ keypoint_2d_src='detection',
+ keypoint_2d_det_file='joint_2d_det_files/cpn_ft_h36m_dbb_test.npy',
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..0d241c498f98e3f2e5e10c4e5434a82d218ab371
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py
@@ -0,0 +1,128 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=160, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-3))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.975, end=80, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=4,
+ kernel_sizes=(3, 3, 3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(),
+ target_flip_cfg=dict(),
+ ),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=243,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ),
+)
+val_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=243,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..08bcda8ed76ebd08b8e525f904c41abb91d9a21e
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py
@@ -0,0 +1,119 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = None
+
+# optimizer
+
+# learning policy
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=2,
+ kernel_sizes=(3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ),
+ traj_backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=2,
+ kernel_sizes=(3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ traj_head=dict(
+ type='TrajectoryRegressionHead',
+ in_channels=1024,
+ num_joints=1,
+ loss=dict(type='MPJPELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ semi_loss=dict(
+ type='SemiSupervisionLoss',
+ joint_parents=[0, 0, 1, 2, 0, 4, 5, 0, 7, 8, 9, 8, 11, 12, 8, 14, 15],
+ warmup_iterations=1311376 // 64 // 8 * 5),
+)
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=27,
+ causal=False,
+ pad_video_seq=True,
+ keypoint_2d_src='detection',
+ keypoint_2d_det_file='joint_2d_det_files/cpn_ft_h36m_dbb_test.npy',
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe'),
+ dict(type='MPJPE', mode='n-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..d145f05b17e917885bf76e7c51ed628b5b096d27
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py
@@ -0,0 +1,117 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = None
+
+# optimizer
+
+# learning policy
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=2,
+ kernel_sizes=(3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ),
+ traj_backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=2,
+ kernel_sizes=(3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ traj_head=dict(
+ type='TrajectoryRegressionHead',
+ in_channels=1024,
+ num_joints=1,
+ loss=dict(type='MPJPELoss', use_target_weight=True),
+ decoder=codec,
+ ),
+ semi_loss=dict(
+ type='SemiSupervisionLoss',
+ joint_parents=[0, 0, 1, 2, 0, 4, 5, 0, 7, 8, 9, 8, 11, 12, 8, 14, 15],
+ warmup_iterations=1311376 // 64 // 8 * 5),
+)
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+val_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=27,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe'),
+ dict(type='MPJPE', mode='n-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..803f907b7bdc1d4cb0fe3496ad05322c48533cf9
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py
@@ -0,0 +1,128 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=160, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-3))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.975, end=80, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=2,
+ kernel_sizes=(3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(),
+ target_flip_cfg=dict(),
+ ),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=27,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ),
+)
+val_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=27,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py
new file mode 100644
index 0000000000000000000000000000000000000000..4b370fe76eb80b292ef59a435c0cc0aa2d48f4b3
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py
@@ -0,0 +1,128 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=160, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=1e-3))
+
+# learning policy
+param_scheduler = [
+ dict(type='ExponentialLR', gamma=0.975, end=80, by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=1024)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ save_best='MPJPE',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='VideoPoseLifting',
+ num_keypoints=17,
+ zero_center=True,
+ root_index=0,
+ remove_root=False)
+
+# model settings
+model = dict(
+ type='PoseLifter',
+ backbone=dict(
+ type='TCN',
+ in_channels=2 * 17,
+ stem_channels=1024,
+ num_blocks=3,
+ kernel_sizes=(3, 3, 3, 3),
+ dropout=0.25,
+ use_stride_conv=True,
+ ),
+ head=dict(
+ type='TemporalRegressionHead',
+ in_channels=1024,
+ num_joints=17,
+ loss=dict(type='MPJPELoss'),
+ decoder=codec,
+ ))
+
+# base dataset settings
+dataset_type = 'Human36mDataset'
+data_root = 'data/h36m/'
+
+# pipelines
+train_pipeline = [
+ dict(
+ type='RandomFlipAroundRoot',
+ keypoints_flip_cfg=dict(),
+ target_flip_cfg=dict(),
+ ),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+val_pipeline = [
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'category_id', 'target_img_path', 'flip_indices',
+ 'target_root'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_train.npz',
+ seq_len=81,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ),
+)
+val_dataloader = dict(
+ batch_size=128,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotation_body3d/fps50/h36m_test.npz',
+ seq_len=81,
+ causal=False,
+ pad_video_seq=True,
+ camera_param_file='annotation_body3d/cameras.pkl',
+ data_root=data_root,
+ data_prefix=dict(img='images/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='MPJPE', mode='mpjpe'),
+ dict(type='MPJPE', mode='p-mpjpe')
+]
+test_evaluator = val_evaluator
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.md b/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.md
new file mode 100644
index 0000000000000000000000000000000000000000..069b8de2da41641bac980e8621c4ac47b00c0457
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.md
@@ -0,0 +1,67 @@
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, +author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, +title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, +journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, +publisher = {IEEE Computer Society}, +volume = {36}, +number = {7}, +pages = {1325-1339}, +month = {jul}, +year = {2014} +} +``` + +
+
+
+
+
+
+VideoPose3D (CVPR'2019)
+ +```bibtex +@inproceedings{pavllo20193d, +title={3d human pose estimation in video with temporal convolutions and semi-supervised training}, +author={Pavllo, Dario and Feichtenhofer, Christoph and Grangier, David and Auli, Michael}, +booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, +pages={7753--7762}, +year={2019} +} +``` + +
+
+
+Testing results on Human3.6M dataset with ground truth 2D detections, supervised training
+
+| Arch | Receptive Field | MPJPE | P-MPJPE | ckpt | log |
+| :--------------------------------------------------------- | :-------------: | :---: | :-----: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [VideoPose3D-supervised-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py) | 27 | 40.1 | 30.1 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_supervised-fe8fbba9_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_supervised_20210527.log.json) |
+| [VideoPose3D-supervised-81frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py) | 81 | 39.1 | 29.3 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_81frames_fullconv_supervised-1f2d1104_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_81frames_fullconv_supervised_20210527.log.json) |
+| [VideoPose3D-supervised-243frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py) | 243 | 37.6 | 28.3 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised-880bea25_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_20210527.log.json) |
+
+Testing results on Human3.6M dataset with CPN 2D detections1, supervised training
+
+| Arch | Receptive Field | MPJPE | P-MPJPE | ckpt | log |
+| :--------------------------------------------------------- | :-------------: | :---: | :-----: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [VideoPose3D-supervised-CPN-1frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py) | 1 | 53.0 | 41.3 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_1frame_fullconv_supervised_cpn_ft-5c3afaed_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_1frame_fullconv_supervised_cpn_ft_20210527.log.json) |
+| [VideoPose3D-supervised-CPN-243frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py) | 243 | 47.9 | 38.0 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft-88f5abbb_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft_20210527.log.json) |
+
+Testing results on Human3.6M dataset with ground truth 2D detections, semi-supervised training
+
+| Training Data | Arch | Receptive Field | MPJPE | P-MPJPE | N-MPJPE | ckpt | log |
+| :------------ | :-------------------------------------------------: | :-------------: | :---: | :-----: | :-----: | :-------------------------------------------------: | :-------------------------------------------------: |
+| 10% S1 | [VideoPose3D-semi-supervised-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py) | 27 | 57.2 | 42.4 | 54.2 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised-54aef83b_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_20210527.log.json) |
+
+Testing results on Human3.6M dataset with CPN 2D detections1, semi-supervised training
+
+| Training Data | Arch | Receptive Field | MPJPE | P-MPJPE | N-MPJPE | ckpt | log |
+| :------------ | :-------------------------------------------------: | :-------------: | :---: | :-----: | :-----: | :-------------------------------------------------: | :-------------------------------------------------: |
+| 10% S1 | [VideoPose3D-semi-supervised-CPN-27frm](/configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py) | 27 | 67.3 | 50.4 | 63.6 | [ckpt](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_cpn_ft-71be9cde_20210527.pth) | [log](https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_cpn_ft_20210527.log.json) |
+
+1 CPN 2D detections are provided by [official repo](https://github.com/facebookresearch/VideoPose3D/blob/master/DATASETS.md). The reformatted version used in this repository can be downloaded from [train_detection](https://download.openmmlab.com/mmpose/body3d/videopose/cpn_ft_h36m_dbb_train.npy) and [test_detection](https://download.openmmlab.com/mmpose/body3d/videopose/cpn_ft_h36m_dbb_test.npy).
diff --git a/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.yml b/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.yml
new file mode 100644
index 0000000000000000000000000000000000000000..818fe0483b6f455002d3600d61fa429c0db72ab3
--- /dev/null
+++ b/configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.yml
@@ -0,0 +1,102 @@
+Collections:
+- Name: VideoPose3D
+ Paper:
+ Title: 3d human pose estimation in video with temporal convolutions and semi-supervised
+ training
+ URL: http://openaccess.thecvf.com/content_CVPR_2019/html/Pavllo_3D_Human_Pose_Estimation_in_Video_With_Temporal_Convolutions_and_CVPR_2019_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/en/papers/algorithms/videopose3d.md
+Models:
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: &id001
+ - VideoPose3D
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-27frm-supv_8xb128-160e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 40.0
+ P-MPJPE: 30.1
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_supervised-fe8fbba9_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-81frm-supv_8xb128-160e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 38.9
+ P-MPJPE: 29.2
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_81frames_fullconv_supervised-1f2d1104_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-243frm-supv_8xb128-160e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 37.6
+ P-MPJPE: 28.3
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised-880bea25_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-1frm-supv-cpn-ft_8xb128-160e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 52.9
+ P-MPJPE: 41.3
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_1frame_fullconv_supervised_cpn_ft-5c3afaed_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 47.9
+ P-MPJPE: 38.0
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft-88f5abbb_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-27frm-semi-supv_8xb64-200e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 58.1
+ N-MPJPE: 54.7
+ P-MPJPE: 42.8
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised-54aef83b_20210527.pth
+- Config: configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m.py
+ In Collection: VideoPose3D
+ Metadata:
+ Architecture: *id001
+ Training Data: Human3.6M
+ Name: video-pose-lift_tcn-27frm-semi-supv-cpn-ft_8xb64-200e_h36m
+ Results:
+ - Dataset: Human3.6M
+ Metrics:
+ MPJPE: 67.4
+ N-MPJPE: 63.2
+ P-MPJPE: 50.1
+ Task: Body 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_27frames_fullconv_semi-supervised_cpn_ft-71be9cde_20210527.pth
diff --git a/configs/face_2d_keypoint/README.md b/configs/face_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..9f9370a754902883013e479779a5db7acb2c9699
--- /dev/null
+++ b/configs/face_2d_keypoint/README.md
@@ -0,0 +1,16 @@
+# 2D Face Landmark Detection
+
+2D face landmark detection (also referred to as face alignment) is defined as the task of detecting the face keypoints from an input image.
+
+Normally, the input images are cropped face images, where the face locates at the center;
+or the rough location (or the bounding box) of the hand is provided.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_face_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/2d_face_demo.md) to run demos.
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, +author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, +title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, +journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, +publisher = {IEEE Computer Society}, +volume = {36}, +number = {7}, +pages = {1325-1339}, +month = {jul}, +year = {2014} +} +``` + +
diff --git a/configs/face_2d_keypoint/rtmpose/README.md b/configs/face_2d_keypoint/rtmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..d0c7f55fb42d9501dbfac7511e1097d4a5aa8c1d --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/README.md @@ -0,0 +1,32 @@ +# RTMPose + +Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency. +In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose. +Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves **67.0% AP** on COCO-WholeBody with **130+ FPS**, outperforming existing open-source libraries. +To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device. + +## Results and Models + +### COCO-WholeBody-Face Dataset + +Results on COCO-WholeBody-Face val set + +| Model | Input Size | NME | Details and Download | +| :-------: | :--------: | :----: | :------------------------------------------------------------------------------------: | +| RTMPose-m | 256x256 | 0.0466 | [rtmpose_coco_wholebody_face.md](./coco_wholebody_face/rtmpose_coco_wholebody_face.md) | + +### WFLW Dataset + +Results on WFLW dataset + +| Model | Input Size | NME | Details and Download | +| :-------: | :--------: | :--: | :---------------------------------------: | +| RTMPose-m | 256x256 | 4.01 | [rtmpose_wflw.md](./wflw/rtmpose_wflw.md) | + +### LaPa Dataset + +Results on LaPa dataset + +| Model | Input Size | NME | Details and Download | +| :-------: | :--------: | :--: | :---------------------------------------: | +| RTMPose-m | 256x256 | 1.29 | [rtmpose_lapa.md](./lapa/rtmpose_lapa.md) | diff --git a/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose-m_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose-m_8xb32-60e_coco-wholebody-face-256x256.py new file mode 100644 index 0000000000000000000000000000000000000000..958a361c07a9dbfc45daabcab2fb08ba889e9525 --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose-m_8xb32-60e_coco-wholebody-face-256x256.py @@ -0,0 +1,231 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 60 +stage2_num_epochs = 10 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=512) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(256, 256), + sigma=(5.66, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=68, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoWholeBodyFaceDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + # dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + # dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='NME', rule='less', max_keep_ckpts=1, interval=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='NME', + norm_mode='keypoint_distance', +) +test_evaluator = val_evaluator diff --git a/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.md b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.md new file mode 100644 index 0000000000000000000000000000000000000000..77d99bc63f7452b80e2983341794326a20c80fa1 --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.md @@ -0,0 +1,39 @@ + + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_rtmpose_m](/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose-m_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0466 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-face_pt-aic-coco_60e-256x256-62026ef2_20230228.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-face_pt-aic-coco_60e-256x256-62026ef2_20230228.json) |
diff --git a/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.yml b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fdc2599e713aa710c102a71c67906090600ef6d6
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.yml
@@ -0,0 +1,14 @@
+Models:
+- Config: configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose-m_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: COCO-WholeBody-Face
+ Name: rtmpose-m_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0466
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-face_pt-aic-coco_60e-256x256-62026ef2_20230228.pth
diff --git a/configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..abbb2ce985129538b7ecef8e5b1995bee1effa3a
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py
@@ -0,0 +1,690 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# lapa coco wflw 300w cofw halpe
+
+# runtime
+max_epochs = 120
+stage2_num_epochs = 10
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=1)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.005,
+ begin=30,
+ end=max_epochs,
+ T_max=max_epochs - 30,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=106,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'LapaDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.2),
+ dict(type='MedianBlur', p=0.2),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+
+# train dataset
+dataset_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_trainval.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+kpt_68_to_106 = [
+ #
+ (0, 0),
+ (1, 2),
+ (2, 4),
+ (3, 6),
+ (4, 8),
+ (5, 10),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 18),
+ (10, 20),
+ (11, 22),
+ (12, 24),
+ (13, 26),
+ (14, 28),
+ (15, 30),
+ (16, 32),
+ #
+ (17, 33),
+ (18, 34),
+ (19, 35),
+ (20, 36),
+ (21, 37),
+ #
+ (22, 42),
+ (23, 43),
+ (24, 44),
+ (25, 45),
+ (26, 46),
+ #
+ (27, 51),
+ (28, 52),
+ (29, 53),
+ (30, 54),
+ #
+ (31, 58),
+ (32, 59),
+ (33, 60),
+ (34, 61),
+ (35, 62),
+ #
+ (36, 66),
+ (39, 70),
+ #
+ ((37, 38), 68),
+ ((40, 41), 72),
+ #
+ (42, 75),
+ (45, 79),
+ #
+ ((43, 44), 77),
+ ((46, 47), 81),
+ #
+ (48, 84),
+ (49, 85),
+ (50, 86),
+ (51, 87),
+ (52, 88),
+ (53, 89),
+ (54, 90),
+ (55, 91),
+ (56, 92),
+ (57, 93),
+ (58, 94),
+ (59, 95),
+ (60, 96),
+ (61, 97),
+ (62, 98),
+ (63, 99),
+ (64, 100),
+ (65, 101),
+ (66, 102),
+ (67, 103)
+]
+
+mapping_halpe = [
+ #
+ (26, 0),
+ (27, 2),
+ (28, 4),
+ (29, 6),
+ (30, 8),
+ (31, 10),
+ (32, 12),
+ (33, 14),
+ (34, 16),
+ (35, 18),
+ (36, 20),
+ (37, 22),
+ (38, 24),
+ (39, 26),
+ (40, 28),
+ (41, 30),
+ (42, 32),
+ #
+ (43, 33),
+ (44, 34),
+ (45, 35),
+ (46, 36),
+ (47, 37),
+ #
+ (48, 42),
+ (49, 43),
+ (50, 44),
+ (51, 45),
+ (52, 46),
+ #
+ (53, 51),
+ (54, 52),
+ (55, 53),
+ (56, 54),
+ #
+ (57, 58),
+ (58, 59),
+ (59, 60),
+ (60, 61),
+ (61, 62),
+ #
+ (62, 66),
+ (65, 70),
+ #
+ ((63, 64), 68),
+ ((66, 67), 72),
+ #
+ (68, 75),
+ (71, 79),
+ #
+ ((69, 70), 77),
+ ((72, 73), 81),
+ #
+ (74, 84),
+ (75, 85),
+ (76, 86),
+ (77, 87),
+ (78, 88),
+ (79, 89),
+ (80, 90),
+ (81, 91),
+ (82, 92),
+ (83, 93),
+ (84, 94),
+ (85, 95),
+ (86, 96),
+ (87, 97),
+ (88, 98),
+ (89, 99),
+ (90, 100),
+ (91, 101),
+ (92, 102),
+ (93, 103)
+]
+
+mapping_wflw = [
+ #
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+ (17, 17),
+ (18, 18),
+ (19, 19),
+ (20, 20),
+ (21, 21),
+ (22, 22),
+ (23, 23),
+ (24, 24),
+ (25, 25),
+ (26, 26),
+ (27, 27),
+ (28, 28),
+ (29, 29),
+ (30, 30),
+ (31, 31),
+ (32, 32),
+ #
+ (33, 33),
+ (34, 34),
+ (35, 35),
+ (36, 36),
+ (37, 37),
+ (38, 38),
+ (39, 39),
+ (40, 40),
+ (41, 41),
+ #
+ (42, 42),
+ (43, 43),
+ (44, 44),
+ (45, 45),
+ (46, 46),
+ (47, 47),
+ (48, 48),
+ (49, 49),
+ (50, 50),
+ #
+ (51, 51),
+ (52, 52),
+ (53, 53),
+ (54, 54),
+ #
+ (55, 58),
+ (56, 59),
+ (57, 60),
+ (58, 61),
+ (59, 62),
+ #
+ (60, 66),
+ (61, 67),
+ (62, 68),
+ (63, 69),
+ (64, 70),
+ (65, 71),
+ (66, 72),
+ (67, 73),
+ #
+ (68, 75),
+ (69, 76),
+ (70, 77),
+ (71, 78),
+ (72, 79),
+ (73, 80),
+ (74, 81),
+ (75, 82),
+ #
+ (76, 84),
+ (77, 85),
+ (78, 86),
+ (79, 87),
+ (80, 88),
+ (81, 89),
+ (82, 90),
+ (83, 91),
+ (84, 92),
+ (85, 93),
+ (86, 94),
+ (87, 95),
+ (88, 96),
+ (89, 97),
+ (90, 98),
+ (91, 99),
+ (92, 100),
+ (93, 101),
+ (94, 102),
+ (95, 103),
+ #
+ (96, 104),
+ #
+ (97, 105)
+]
+
+mapping_cofw = [
+ #
+ (0, 33),
+ (2, 38),
+ (4, 35),
+ (5, 40),
+ #
+ (1, 46),
+ (3, 50),
+ (6, 44),
+ (7, 48),
+ #
+ (8, 60),
+ (10, 64),
+ (12, 62),
+ (13, 66),
+ #
+ (9, 72),
+ (11, 68),
+ (14, 70),
+ (15, 74),
+ #
+ (18, 57),
+ (19, 63),
+ (20, 54),
+ (21, 60),
+ #
+ (22, 84),
+ (23, 90),
+ (24, 87),
+ (25, 98),
+ (26, 102),
+ (27, 93),
+ #
+ (28, 16)
+]
+dataset_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+dataset_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_train.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_train.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_133kpt.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[
+ dataset_lapa, dataset_coco, dataset_wflw, dataset_300w,
+ dataset_cofw, dataset_halpe
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# test dataset
+val_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+val_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+val_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_test.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_test.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[val_lapa, val_coco, val_wflw, val_300w, val_cofw, val_halpe],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='NME', rule='less', max_keep_ckpts=1, interval=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/rtmpose/face6/rtmpose-s_8xb256-120e_face6-256x256.py b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-s_8xb256-120e_face6-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..62fa305115e48a619966cdaa2ac9f03cce38bfa9
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-s_8xb256-120e_face6-256x256.py
@@ -0,0 +1,691 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# lapa coco wflw 300w cofw halpe
+
+# runtime
+max_epochs = 120
+stage2_num_epochs = 10
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=1)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.005,
+ begin=30,
+ end=max_epochs,
+ T_max=max_epochs - 30,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/cspnext-s_imagenet_600e-ea671761.pth')
+ ),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=512,
+ out_channels=106,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'LapaDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.2),
+ dict(type='MedianBlur', p=0.2),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+# train dataset
+dataset_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_trainval.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+kpt_68_to_106 = [
+ #
+ (0, 0),
+ (1, 2),
+ (2, 4),
+ (3, 6),
+ (4, 8),
+ (5, 10),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 18),
+ (10, 20),
+ (11, 22),
+ (12, 24),
+ (13, 26),
+ (14, 28),
+ (15, 30),
+ (16, 32),
+ #
+ (17, 33),
+ (18, 34),
+ (19, 35),
+ (20, 36),
+ (21, 37),
+ #
+ (22, 42),
+ (23, 43),
+ (24, 44),
+ (25, 45),
+ (26, 46),
+ #
+ (27, 51),
+ (28, 52),
+ (29, 53),
+ (30, 54),
+ #
+ (31, 58),
+ (32, 59),
+ (33, 60),
+ (34, 61),
+ (35, 62),
+ #
+ (36, 66),
+ (39, 70),
+ #
+ ((37, 38), 68),
+ ((40, 41), 72),
+ #
+ (42, 75),
+ (45, 79),
+ #
+ ((43, 44), 77),
+ ((46, 47), 81),
+ #
+ (48, 84),
+ (49, 85),
+ (50, 86),
+ (51, 87),
+ (52, 88),
+ (53, 89),
+ (54, 90),
+ (55, 91),
+ (56, 92),
+ (57, 93),
+ (58, 94),
+ (59, 95),
+ (60, 96),
+ (61, 97),
+ (62, 98),
+ (63, 99),
+ (64, 100),
+ (65, 101),
+ (66, 102),
+ (67, 103)
+]
+
+mapping_halpe = [
+ #
+ (26, 0),
+ (27, 2),
+ (28, 4),
+ (29, 6),
+ (30, 8),
+ (31, 10),
+ (32, 12),
+ (33, 14),
+ (34, 16),
+ (35, 18),
+ (36, 20),
+ (37, 22),
+ (38, 24),
+ (39, 26),
+ (40, 28),
+ (41, 30),
+ (42, 32),
+ #
+ (43, 33),
+ (44, 34),
+ (45, 35),
+ (46, 36),
+ (47, 37),
+ #
+ (48, 42),
+ (49, 43),
+ (50, 44),
+ (51, 45),
+ (52, 46),
+ #
+ (53, 51),
+ (54, 52),
+ (55, 53),
+ (56, 54),
+ #
+ (57, 58),
+ (58, 59),
+ (59, 60),
+ (60, 61),
+ (61, 62),
+ #
+ (62, 66),
+ (65, 70),
+ #
+ ((63, 64), 68),
+ ((66, 67), 72),
+ #
+ (68, 75),
+ (71, 79),
+ #
+ ((69, 70), 77),
+ ((72, 73), 81),
+ #
+ (74, 84),
+ (75, 85),
+ (76, 86),
+ (77, 87),
+ (78, 88),
+ (79, 89),
+ (80, 90),
+ (81, 91),
+ (82, 92),
+ (83, 93),
+ (84, 94),
+ (85, 95),
+ (86, 96),
+ (87, 97),
+ (88, 98),
+ (89, 99),
+ (90, 100),
+ (91, 101),
+ (92, 102),
+ (93, 103)
+]
+
+mapping_wflw = [
+ #
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+ (17, 17),
+ (18, 18),
+ (19, 19),
+ (20, 20),
+ (21, 21),
+ (22, 22),
+ (23, 23),
+ (24, 24),
+ (25, 25),
+ (26, 26),
+ (27, 27),
+ (28, 28),
+ (29, 29),
+ (30, 30),
+ (31, 31),
+ (32, 32),
+ #
+ (33, 33),
+ (34, 34),
+ (35, 35),
+ (36, 36),
+ (37, 37),
+ (38, 38),
+ (39, 39),
+ (40, 40),
+ (41, 41),
+ #
+ (42, 42),
+ (43, 43),
+ (44, 44),
+ (45, 45),
+ (46, 46),
+ (47, 47),
+ (48, 48),
+ (49, 49),
+ (50, 50),
+ #
+ (51, 51),
+ (52, 52),
+ (53, 53),
+ (54, 54),
+ #
+ (55, 58),
+ (56, 59),
+ (57, 60),
+ (58, 61),
+ (59, 62),
+ #
+ (60, 66),
+ (61, 67),
+ (62, 68),
+ (63, 69),
+ (64, 70),
+ (65, 71),
+ (66, 72),
+ (67, 73),
+ #
+ (68, 75),
+ (69, 76),
+ (70, 77),
+ (71, 78),
+ (72, 79),
+ (73, 80),
+ (74, 81),
+ (75, 82),
+ #
+ (76, 84),
+ (77, 85),
+ (78, 86),
+ (79, 87),
+ (80, 88),
+ (81, 89),
+ (82, 90),
+ (83, 91),
+ (84, 92),
+ (85, 93),
+ (86, 94),
+ (87, 95),
+ (88, 96),
+ (89, 97),
+ (90, 98),
+ (91, 99),
+ (92, 100),
+ (93, 101),
+ (94, 102),
+ (95, 103),
+ #
+ (96, 104),
+ #
+ (97, 105)
+]
+
+mapping_cofw = [
+ #
+ (0, 33),
+ (2, 38),
+ (4, 35),
+ (5, 40),
+ #
+ (1, 46),
+ (3, 50),
+ (6, 44),
+ (7, 48),
+ #
+ (8, 60),
+ (10, 64),
+ (12, 62),
+ (13, 66),
+ #
+ (9, 72),
+ (11, 68),
+ (14, 70),
+ (15, 74),
+ #
+ (18, 57),
+ (19, 63),
+ (20, 54),
+ (21, 60),
+ #
+ (22, 84),
+ (23, 90),
+ (24, 87),
+ (25, 98),
+ (26, 102),
+ (27, 93),
+ #
+ (28, 16)
+]
+dataset_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+dataset_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_train.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_train.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_133kpt.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[
+ dataset_lapa, dataset_coco, dataset_wflw, dataset_300w,
+ dataset_cofw, dataset_halpe
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ pin_memory=True,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# test dataset
+val_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+val_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+val_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_test.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_test.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[val_lapa, val_coco, val_wflw, val_300w, val_cofw, val_halpe],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='NME', rule='less', max_keep_ckpts=1, interval=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/rtmpose/face6/rtmpose-t_8xb256-120e_face6-256x256.py b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-t_8xb256-120e_face6-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..751bedffe77aa1dc08bf5360a1f3b5ea9781f209
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/face6/rtmpose-t_8xb256-120e_face6-256x256.py
@@ -0,0 +1,689 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# lapa coco wflw 300w cofw halpe
+
+# runtime
+max_epochs = 120
+stage2_num_epochs = 10
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=1)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.005,
+ begin=30,
+ end=max_epochs,
+ T_max=90,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/cspnext-tiny_imagenet_600e-3a2dd350.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=384,
+ out_channels=106,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'LapaDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.2),
+ dict(type='MedianBlur', p=0.2),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(
+ type='GenerateTarget',
+ encoder=codec,
+ use_dataset_keypoint_weights=True),
+ dict(type='PackPoseInputs')
+]
+# train dataset
+dataset_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_trainval.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+kpt_68_to_106 = [
+ #
+ (0, 0),
+ (1, 2),
+ (2, 4),
+ (3, 6),
+ (4, 8),
+ (5, 10),
+ (6, 12),
+ (7, 14),
+ (8, 16),
+ (9, 18),
+ (10, 20),
+ (11, 22),
+ (12, 24),
+ (13, 26),
+ (14, 28),
+ (15, 30),
+ (16, 32),
+ #
+ (17, 33),
+ (18, 34),
+ (19, 35),
+ (20, 36),
+ (21, 37),
+ #
+ (22, 42),
+ (23, 43),
+ (24, 44),
+ (25, 45),
+ (26, 46),
+ #
+ (27, 51),
+ (28, 52),
+ (29, 53),
+ (30, 54),
+ #
+ (31, 58),
+ (32, 59),
+ (33, 60),
+ (34, 61),
+ (35, 62),
+ #
+ (36, 66),
+ (39, 70),
+ #
+ ((37, 38), 68),
+ ((40, 41), 72),
+ #
+ (42, 75),
+ (45, 79),
+ #
+ ((43, 44), 77),
+ ((46, 47), 81),
+ #
+ (48, 84),
+ (49, 85),
+ (50, 86),
+ (51, 87),
+ (52, 88),
+ (53, 89),
+ (54, 90),
+ (55, 91),
+ (56, 92),
+ (57, 93),
+ (58, 94),
+ (59, 95),
+ (60, 96),
+ (61, 97),
+ (62, 98),
+ (63, 99),
+ (64, 100),
+ (65, 101),
+ (66, 102),
+ (67, 103)
+]
+
+mapping_halpe = [
+ #
+ (26, 0),
+ (27, 2),
+ (28, 4),
+ (29, 6),
+ (30, 8),
+ (31, 10),
+ (32, 12),
+ (33, 14),
+ (34, 16),
+ (35, 18),
+ (36, 20),
+ (37, 22),
+ (38, 24),
+ (39, 26),
+ (40, 28),
+ (41, 30),
+ (42, 32),
+ #
+ (43, 33),
+ (44, 34),
+ (45, 35),
+ (46, 36),
+ (47, 37),
+ #
+ (48, 42),
+ (49, 43),
+ (50, 44),
+ (51, 45),
+ (52, 46),
+ #
+ (53, 51),
+ (54, 52),
+ (55, 53),
+ (56, 54),
+ #
+ (57, 58),
+ (58, 59),
+ (59, 60),
+ (60, 61),
+ (61, 62),
+ #
+ (62, 66),
+ (65, 70),
+ #
+ ((63, 64), 68),
+ ((66, 67), 72),
+ #
+ (68, 75),
+ (71, 79),
+ #
+ ((69, 70), 77),
+ ((72, 73), 81),
+ #
+ (74, 84),
+ (75, 85),
+ (76, 86),
+ (77, 87),
+ (78, 88),
+ (79, 89),
+ (80, 90),
+ (81, 91),
+ (82, 92),
+ (83, 93),
+ (84, 94),
+ (85, 95),
+ (86, 96),
+ (87, 97),
+ (88, 98),
+ (89, 99),
+ (90, 100),
+ (91, 101),
+ (92, 102),
+ (93, 103)
+]
+
+mapping_wflw = [
+ #
+ (0, 0),
+ (1, 1),
+ (2, 2),
+ (3, 3),
+ (4, 4),
+ (5, 5),
+ (6, 6),
+ (7, 7),
+ (8, 8),
+ (9, 9),
+ (10, 10),
+ (11, 11),
+ (12, 12),
+ (13, 13),
+ (14, 14),
+ (15, 15),
+ (16, 16),
+ (17, 17),
+ (18, 18),
+ (19, 19),
+ (20, 20),
+ (21, 21),
+ (22, 22),
+ (23, 23),
+ (24, 24),
+ (25, 25),
+ (26, 26),
+ (27, 27),
+ (28, 28),
+ (29, 29),
+ (30, 30),
+ (31, 31),
+ (32, 32),
+ #
+ (33, 33),
+ (34, 34),
+ (35, 35),
+ (36, 36),
+ (37, 37),
+ (38, 38),
+ (39, 39),
+ (40, 40),
+ (41, 41),
+ #
+ (42, 42),
+ (43, 43),
+ (44, 44),
+ (45, 45),
+ (46, 46),
+ (47, 47),
+ (48, 48),
+ (49, 49),
+ (50, 50),
+ #
+ (51, 51),
+ (52, 52),
+ (53, 53),
+ (54, 54),
+ #
+ (55, 58),
+ (56, 59),
+ (57, 60),
+ (58, 61),
+ (59, 62),
+ #
+ (60, 66),
+ (61, 67),
+ (62, 68),
+ (63, 69),
+ (64, 70),
+ (65, 71),
+ (66, 72),
+ (67, 73),
+ #
+ (68, 75),
+ (69, 76),
+ (70, 77),
+ (71, 78),
+ (72, 79),
+ (73, 80),
+ (74, 81),
+ (75, 82),
+ #
+ (76, 84),
+ (77, 85),
+ (78, 86),
+ (79, 87),
+ (80, 88),
+ (81, 89),
+ (82, 90),
+ (83, 91),
+ (84, 92),
+ (85, 93),
+ (86, 94),
+ (87, 95),
+ (88, 96),
+ (89, 97),
+ (90, 98),
+ (91, 99),
+ (92, 100),
+ (93, 101),
+ (94, 102),
+ (95, 103),
+ #
+ (96, 104),
+ #
+ (97, 105)
+]
+
+mapping_cofw = [
+ #
+ (0, 33),
+ (2, 38),
+ (4, 35),
+ (5, 40),
+ #
+ (1, 46),
+ (3, 50),
+ (6, 44),
+ (7, 48),
+ #
+ (8, 60),
+ (10, 64),
+ (12, 62),
+ (13, 66),
+ #
+ (9, 72),
+ (11, 68),
+ (14, 70),
+ (15, 74),
+ #
+ (18, 57),
+ (19, 63),
+ (20, 54),
+ (21, 60),
+ #
+ (22, 84),
+ (23, 90),
+ (24, 87),
+ (25, 98),
+ (26, 102),
+ (27, 93),
+ #
+ (28, 16)
+]
+dataset_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+dataset_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_train.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+dataset_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_train.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+dataset_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_133kpt.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[
+ dataset_lapa, dataset_coco, dataset_wflw, dataset_300w,
+ dataset_cofw, dataset_halpe
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# test dataset
+val_lapa = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='LaPa/annotations/lapa_test.json',
+ data_prefix=dict(img='pose/LaPa/'),
+ pipeline=[],
+)
+
+val_coco = dict(
+ type='CocoWholeBodyFaceDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_wflw = dict(
+ type='WFLWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='wflw/annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='pose/WFLW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_wflw)
+ ],
+)
+
+val_300w = dict(
+ type='Face300WDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='300w/annotations/face_landmarks_300w_test.json',
+ data_prefix=dict(img='pose/300w/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=kpt_68_to_106)
+ ],
+)
+
+val_cofw = dict(
+ type='COFWDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='cofw/annotations/cofw_test.json',
+ data_prefix=dict(img='pose/COFW/images/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_cofw)
+ ],
+)
+
+val_halpe = dict(
+ type='HalpeDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter', num_keypoints=106, mapping=mapping_halpe)
+ ],
+)
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/lapa.py'),
+ datasets=[val_lapa, val_coco, val_wflw, val_300w, val_cofw, val_halpe],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='NME', rule='less', max_keep_ckpts=1, interval=1))
+
+custom_hooks = [
+ # dict(
+ # type='EMAHook',
+ # ema_type='ExpMomentumEMA',
+ # momentum=0.0002,
+ # update_buffers=True,
+ # priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.md b/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.md
new file mode 100644
index 0000000000000000000000000000000000000000..5f989fa7831ca3ebde51626f13c8e4db69a179ab
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.md
@@ -0,0 +1,71 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+- Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset.
+- `Face6` and `*` denote model trained on 6 public datasets:
+ - [COCO-Wholebody-Face](https://github.com/jin-s13/COCO-WholeBody/)
+ - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html)
+ - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/)
+ - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/)
+ - [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/)
+ - [LaPa](https://github.com/JDAI-CV/lapa-dataset)
+
+| Config | Input Size | NMECOCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +(LaPa) | FLOPS
(G) | Download | +| :--------------------------------------------------------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/face_2d_keypoint/rtmpose-t_8xb256-120e_face6-256x256.py) | 256x256 | 1.67 | 0.652 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth) | +| [RTMPose-s\*](./rtmpose/face_2d_keypoint/rtmpose-s_8xb256-120e_face6-256x256.py) | 256x256 | 1.59 | 1.119 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth) | +| [RTMPose-m\*](./rtmpose/face_2d_keypoint/rtmpose-m_8xb256-120e_face6-256x256.py) | 256x256 | 1.44 | 2.852 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth) | diff --git a/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.yml b/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.yml new file mode 100644 index 0000000000000000000000000000000000000000..38b8395bd90b23d25f4ad29f953c67ffb60cdfb2 --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.yml @@ -0,0 +1,51 @@ +Collections: +- Name: RTMPose + Paper: + Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose" + URL: https://arxiv.org/abs/2303.07399 + README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md +Models: +- Config: configs/face_2d_keypoint/rtmpose/face6/rtmpose-t_8xb256-120e_face6-256x256.py + In Collection: RTMPose + Metadata: + Architecture: &id001 + - RTMPose + Training Data: &id002 + - COCO-Wholebody-Face + - WFLW + - 300W + - COFW + - Halpe + - LaPa + Name: rtmpose-t_8xb256-120e_face6-256x256 + Results: + - Dataset: Face6 + Metrics: + NME: 1.67 + Task: Face 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth +- Config: configs/face_2d_keypoint/rtmpose/face6/rtmpose-s_8xb256-120e_face6-256x256.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-s_8xb256-120e_face6-256x256 + Results: + - Dataset: Face6 + Metrics: + NME: 1.59 + Task: Face 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth +- Config: configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py + In Collection: RTMPose + Metadata: + Architecture: *id001 + Training Data: *id002 + Name: rtmpose-m_8xb256-120e_face6-256x256 + Alias: face + Results: + - Dataset: Face6 + Metrics: + NME: 1.44 + Task: Face 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth diff --git a/configs/face_2d_keypoint/rtmpose/lapa/rtmpose-m_8xb64-120e_lapa-256x256.py b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose-m_8xb64-120e_lapa-256x256.py new file mode 100644 index 0000000000000000000000000000000000000000..fee1201db1f56efd162292dbb2b6155b7865dced --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose-m_8xb64-120e_lapa-256x256.py @@ -0,0 +1,246 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 120 +stage2_num_epochs = 10 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=512) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(256, 256), + sigma=(5.66, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=106, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'LapaDataset' +data_mode = 'topdown' +data_root = 'data/LaPa/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/pose/LaPa/', +# f'{data_root}': 's3://openmmlab/datasets/pose/LaPa/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=80), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.2), + dict(type='MedianBlur', p=0.2), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + # dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/lapa_train.json', + data_prefix=dict(img=''), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/lapa_val.json', + data_prefix=dict(img=''), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/lapa_test.json', + data_prefix=dict(img=''), + test_mode=True, + pipeline=val_pipeline, + )) + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='NME', rule='less', max_keep_ckpts=1, interval=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='NME', + norm_mode='keypoint_distance', +) +test_evaluator = val_evaluator diff --git a/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.md b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.md new file mode 100644 index 0000000000000000000000000000000000000000..9638de7551c0e0cabaa2ca1ba606bf8abc42b311 --- /dev/null +++ b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.md @@ -0,0 +1,40 @@ + + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on LaPa val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :------------------------------------------------------------: |
+| [pose_rtmpose_m](/configs/face_2d_keypoint/rtmpose/lapa/rtmpose-m_8xb64-120e_lapa-256x256.py) | 256x256 | 1.29 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-lapa_pt-aic-coco_120e-256x256-762b1ae2_20230422.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-lapa_pt-aic-coco_120e-256x256-762b1ae2_20230422.json) |
diff --git a/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.yml b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.yml
new file mode 100644
index 0000000000000000000000000000000000000000..96acff8de6c25f064622a9711565ed0ffc594912
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/rtmpose/lapa/rtmpose-m_8xb64-120e_lapa-256x256.py
+ In Collection: RTMPose
+ Alias: face
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: LaPa
+ Name: rtmpose-m_8xb64-120e_lapa-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME: 1.29
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-lapa_pt-aic-coco_120e-256x256-762b1ae2_20230422.pth
diff --git a/configs/face_2d_keypoint/rtmpose/wflw/rtmpose-m_8xb64-60e_wflw-256x256.py b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose-m_8xb64-60e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..cbfd788d6062dc70aa3716920a189e681a393497
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose-m_8xb64-60e_wflw-256x256.py
@@ -0,0 +1,231 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 60
+stage2_num_epochs = 10
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=1)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=98,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/pose/WFLW/',
+# f'{data_root}': 's3://openmmlab/datasets/pose/WFLW/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ # dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ # dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='NME', rule='less', max_keep_ckpts=1, interval=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.md b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..b0070258da1b81c6ee5bd7ebe198eae968067f80
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.md
@@ -0,0 +1,42 @@
+
+
+LaPa (AAAI'2020)
+ +```bibtex +@inproceedings{liu2020new, + title={A New Dataset and Boundary-Attention Semantic Segmentation for Face Parsing.}, + author={Liu, Yinglu and Shi, Hailin and Shen, Hao and Si, Yue and Wang, Xiaobo and Mei, Tao}, + booktitle={AAAI}, + pages={11637--11644}, + year={2020} +} +``` + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train.
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :------------------------------------------------------------: |
+| [pose_rtmpose_m](/configs/face_2d_keypoint/rtmpose/wflw/rtmpose-m_8xb64-60e_wflw-256x256.py) | 256x256 | 4.01 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-wflw_pt-aic-coco_60e-256x256-dc1dcdcf_20230228.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-wflw_pt-aic-coco_60e-256x256-dc1dcdcf_20230228.json) |
diff --git a/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.yml b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1112fdf69dc000a7c03d7d331b10d9649d173df8
--- /dev/null
+++ b/configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.yml
@@ -0,0 +1,14 @@
+Models:
+- Config: configs/face_2d_keypoint/rtmpose/wflw/rtmpose-m_8xb64-60e_wflw-256x256.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: WFLW
+ Name: rtmpose-m_8xb64-60e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME: 4.01
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-wflw_pt-aic-coco_60e-256x256-dc1dcdcf_20230228.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.md b/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.md
new file mode 100644
index 0000000000000000000000000000000000000000..ace8776c4e28e66559e4dcecec0785e6ef5a0771
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.md
@@ -0,0 +1,44 @@
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on 300W dataset
+
+The model is trained on 300W train.
+
+| Arch | Input Size | NME*common* | NME*challenge* | NME*full* | NME*test* | ckpt | log |
+| :--------------------------------- | :--------: | :--------------------: | :-----------------------: | :------------------: | :------------------: | :---------------------------------: | :--------------------------------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/300w/td-hm_hrnetv2-w18_8xb64-60e_300w-256x256.py) | 256x256 | 2.92 | 5.64 | 3.45 | 4.10 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_300w_256x256-eea53406_20211019.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_300w_256x256_20211019.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.yml b/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.yml
new file mode 100644
index 0000000000000000000000000000000000000000..58dcb4832ac5824e375f5d8dc66f6648626528f8
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.yml
@@ -0,0 +1,23 @@
+Collections:
+- Name: HRNetv2
+ Paper:
+ Title: Deep High-Resolution Representation Learning for Visual Recognition
+ URL: https://ieeexplore.ieee.org/abstract/document/9052469/
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hrnetv2.md
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/300w/td-hm_hrnetv2-w18_8xb64-60e_300w-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: 300W
+ Name: td-hm_hrnetv2-w18_8xb64-60e_300w-256x256
+ Results:
+ - Dataset: 300W
+ Metrics:
+ NME challenge: 5.64
+ NME common: 2.92
+ NME full: 3.45
+ NME test: 4.1
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_300w_256x256-eea53406_20211019.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300w/td-hm_hrnetv2-w18_8xb64-60e_300w-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/300w/td-hm_hrnetv2-w18_8xb64-60e_300w-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..52473a4664cca8266f603729d1a631aa6dc5b4ca
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300w/td-hm_hrnetv2-w18_8xb64-60e_300w-256x256.py
@@ -0,0 +1,161 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=1.5)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=68,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Face300WDataset'
+data_mode = 'topdown'
+data_root = 'data/300w/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_300w_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_300w_valid.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.md b/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.md
new file mode 100644
index 0000000000000000000000000000000000000000..773bc602ae701884088dc372e4e8fd10202dfb81
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.md
@@ -0,0 +1,42 @@
+
+
+300W (IMAVIS'2016)
+ +```bibtex +@article{sagonas2016300, + title={300 faces in-the-wild challenge: Database and results}, + author={Sagonas, Christos and Antonakos, Epameinondas and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja}, + journal={Image and vision computing}, + volume={47}, + pages={3--18}, + year={2016}, + publisher={Elsevier} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on 300W-LP dataset
+
+The model is trained on 300W-LP train.
+
+| Arch | Input Size | NME*full* | NME*test* | ckpt | log |
+| :------------------------------------------------- | :--------: | :------------------: | :------------------: | :------------------------------------------------: | :------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/300wlp/td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256.py) | 256x256 | 0.0413 | 0.04125 | [ckpt](https://download.openmmlab.com/mmpose/v1/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_w18_300wlp_256x256-fb433d21_20230922.pth) | [log](https://download.openmmlab.com/mmpose/v1/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_w18_300wlp_256x256-fb433d21_20230922.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.yml b/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.yml
new file mode 100644
index 0000000000000000000000000000000000000000..844c15df6d77f726c49465b668dbed852204a36b
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.yml
@@ -0,0 +1,20 @@
+Collections:
+- Name: HRNetv2
+ Paper:
+ Title: Deep High-Resolution Representation Learning for Visual Recognition
+ URL: https://ieeexplore.ieee.org/abstract/document/9052469/
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/hrnetv2.md
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/300wlp/td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: 300W-LP
+ Name: td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256
+ Results:
+ - Dataset: 300W-LP
+ Metrics:
+ NME full: 0.0413
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_w18_300wlp_256x256-fb433d21_20230922.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/300wlp/td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/300wlp/td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..e96a6bf0ebbc5055d6f19ca7803eec647dc28448
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/300wlp/td-hm_hrnetv2-w18_8xb64-60e_300wlp-256x256.py
@@ -0,0 +1,160 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=1.5)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=68,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Face300WLPDataset'
+data_mode = 'topdown'
+data_root = 'data/300wlp/'
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_300wlp_train.json',
+ data_prefix=dict(img='train/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_300wlp_valid.json',
+ data_prefix=dict(img='val/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/README.md b/configs/face_2d_keypoint/topdown_heatmap/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a8b7cf98fa119c4a1065484b24bd768196a3622d
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/README.md
@@ -0,0 +1,57 @@
+# Top-down heatmap-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html).
+
+300WLP (IEEE'2017)
+ +```bibtex +@article{zhu2017face, + title={Face alignment in full pose range: A 3d total solution}, + author={Zhu, Xiangyu and Liu, Xiaoming and Lei, Zhen and Li, Stan Z}, + journal={IEEE transactions on pattern analysis and machine intelligence}, + year={2017}, + publisher={IEEE} +} +``` + +
+
+
+
+## Results and Models
+
+### 300W Dataset
+
+Results on 300W dataset
+
+| Model | Input Size | NME*common* | NME*challenge* | NME*full* | NME*test* | Details and Download |
+| :---------: | :--------: | :--------------------: | :-----------------------: | :------------------: | :------------------: | :---------------------------------------: |
+| HRNetv2-w18 | 256x256 | 2.92 | 5.64 | 3.45 | 4.10 | [hrnetv2_300w.md](./300w/hrnetv2_300w.md) |
+
+### AFLW Dataset
+
+Results on AFLW dataset
+
+| Model | Input Size | NME*full* | NME*frontal* | Details and Download |
+| :--------------: | :--------: | :------------------: | :---------------------: | :-------------------------------------------------: |
+| HRNetv2-w18+Dark | 256x256 | 1.35 | 1.19 | [hrnetv2_dark_aflw.md](./aflw/hrnetv2_dark_aflw.md) |
+| HRNetv2-w18 | 256x256 | 1.41 | 1.27 | [hrnetv2_aflw.md](./aflw/hrnetv2_aflw.md) |
+
+### COCO-WholeBody-Face Dataset
+
+Results on COCO-WholeBody-Face val set
+
+| Model | Input Size | NME | Details and Download |
+| :--------------: | :--------: | :----: | :----------------------------------------------------------------------------------------------: |
+| HRNetv2-w18+Dark | 256x256 | 0.0513 | [hrnetv2_dark_coco_wholebody_face.md](./coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.md) |
+| SCNet-50 | 256x256 | 0.0567 | [scnet_coco_wholebody_face.md](./coco_wholebody_face/scnet_coco_wholebody_face.md) |
+| HRNetv2-w18 | 256x256 | 0.0569 | [hrnetv2_coco_wholebody_face.md](./coco_wholebody_face/hrnetv2_coco_wholebody_face.md) |
+| ResNet-50 | 256x256 | 0.0582 | [resnet_coco_wholebody_face.md](./coco_wholebody_face/resnet_coco_wholebody_face.md) |
+| HourglassNet | 256x256 | 0.0587 | [hourglass_coco_wholebody_face.md](./coco_wholebody_face/hourglass_coco_wholebody_face.md) |
+| MobileNet-v2 | 256x256 | 0.0611 | [mobilenetv2_coco_wholebody_face.md](./coco_wholebody_face/mobilenetv2_coco_wholebody_face.md) |
+
+### COFW Dataset
+
+Results on COFW dataset
+
+| Model | Input Size | NME | Details and Download |
+| :---------: | :--------: | :--: | :---------------------------------------: |
+| HRNetv2-w18 | 256x256 | 3.48 | [hrnetv2_cofw.md](./cofw/hrnetv2_cofw.md) |
+
+### WFLW Dataset
+
+Results on WFLW dataset
+
+| Model | Input Size | NME*test* | NME*pose* | NME*illumination* | NME*occlusion* | NME*blur* | NME*makeup* | NME*expression* | Details and Download |
+| :-----: | :--------: | :------------------: | :------------------: | :--------------------------: | :-----------------------: | :------------------: | :--------------------: | :------------------------: | :--------------------: |
+| HRNetv2-w18+Dark | 256x256 | 3.98 | 6.98 | 3.96 | 4.78 | 4.56 | 3.89 | 4.29 | [hrnetv2_dark_wflw.md](./wflw/hrnetv2_dark_wflw.md) |
+| HRNetv2-w18+AWing | 256x256 | 4.02 | 6.94 | 3.97 | 4.78 | 4.59 | 3.87 | 4.28 | [hrnetv2_awing_wflw.md](./wflw/hrnetv2_awing_wflw.md) |
+| HRNetv2-w18 | 256x256 | 4.06 | 6.97 | 3.99 | 4.83 | 4.58 | 3.94 | 4.33 | [hrnetv2_wflw.md](./wflw/hrnetv2_wflw.md) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.md b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..70c59ac2e4ca7a58db9057f01d2af3c17ce5785d
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.md
@@ -0,0 +1,43 @@
+
+
+
+
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on AFLW dataset
+
+The model is trained on AFLW train and evaluated on AFLW full and frontal.
+
+| Arch | Input Size | NME*full* | NME*frontal* | ckpt | log |
+| :------------------------------------------------ | :--------: | :------------------: | :---------------------: | :-----------------------------------------------: | :-----------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py) | 256x256 | 1.41 | 1.27 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256-f2bbc62b_20210125.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256_20210125.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.yml b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..06d2d43b9c1983c2c4d43d715b08721a822ffed3
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: AFLW
+ Name: td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256
+ Results:
+ - Dataset: AFLW
+ Metrics:
+ NME frontal: 1.27
+ NME full: 1.41
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256-f2bbc62b_20210125.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.md b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..a51c473d3b243f7f773a851bb69c425b14443767
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.md
@@ -0,0 +1,60 @@
+
+
+AFLW (ICCVW'2011)
+ +```bibtex +@inproceedings{koestinger2011annotated, + title={Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization}, + author={Koestinger, Martin and Wohlhart, Paul and Roth, Peter M and Bischof, Horst}, + booktitle={2011 IEEE international conference on computer vision workshops (ICCV workshops)}, + pages={2144--2151}, + year={2011}, + organization={IEEE} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on AFLW dataset
+
+The model is trained on AFLW train and evaluated on AFLW full and frontal.
+
+| Arch | Input Size | NME*full* | NME*frontal* | ckpt | log |
+| :------------------------------------------------ | :--------: | :------------------: | :---------------------: | :-----------------------------------------------: | :-----------------------------------------------: |
+| [pose_hrnetv2_w18_dark](/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256.py) | 256x256 | 1.35 | 1.19 | [ckpt](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_aflw_256x256_dark-219606c0_20210125.pth) | [log](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_aflw_256x256_dark_20210125.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.yml b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..54c09538974835c5a701de61f41c812d2813940a
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: AFLW
+ Name: td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256
+ Results:
+ - Dataset: AFLW
+ Metrics:
+ NME frontal: 1.19
+ NME full: 1.34
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_aflw_256x256_dark-219606c0_20210125.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..a157a01442f155d34f7fd330014028bc77c4f888
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py
@@ -0,0 +1,156 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=19,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/aflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_aflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_aflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME', norm_mode='use_norm_item', norm_item='bbox_size')
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..44100cebe60bbe023837dba7586f2c913b731918
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_dark-8xb64-60e_aflw-256x256.py
@@ -0,0 +1,160 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=19,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'AFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/aflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_aflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_aflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME', norm_mode='use_norm_item', norm_item='bbox_size')
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..6099dcf06dcf8a9e988b77623bd6f3a7ee7883a7
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.md
@@ -0,0 +1,39 @@
+
+
+AFLW (ICCVW'2011)
+ +```bibtex +@inproceedings{koestinger2011annotated, + title={Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization}, + author={Koestinger, Martin and Wohlhart, Paul and Roth, Peter M and Bischof, Horst}, + booktitle={2011 IEEE international conference on computer vision workshops (ICCV workshops)}, + pages={2144--2151}, + year={2011}, + organization={IEEE} +} +``` + +
+
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_hourglass_52](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0587 | [ckpt](https://download.openmmlab.com/mmpose/face/hourglass/hourglass52_coco_wholebody_face_256x256-6994cf2e_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/hourglass/hourglass52_coco_wholebody_face_256x256_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..704c01983e4ab53f87a0a1ec798b49bf4b8b5e6f
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.yml
@@ -0,0 +1,14 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture:
+ - Hourglass
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0587
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hourglass/hourglass52_coco_wholebody_face_256x256-6994cf2e_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..d16ea2bc7fa50b3b8df57219bc5e3fada52c3558
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.md
@@ -0,0 +1,39 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0569 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_coco_wholebody_face_256x256-c1ca469b_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_coco_wholebody_face_256x256_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0a4a38d5b78e5390d60c71ba43d663fafb51d279
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.yml
@@ -0,0 +1,14 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0569
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_coco_wholebody_face_256x256-c1ca469b_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..fd059ee23cc17a82ed71cfc0ca089785ea6e150e
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.md
@@ -0,0 +1,56 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_hrnetv2_w18_dark](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0513 | [ckpt](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_coco_wholebody_face_256x256_dark-3d9a334e_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_coco_wholebody_face_256x256_dark_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cedc4950f9d2fba11e9a18ce2ca5942dcc2492eb
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0513
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_coco_wholebody_face_256x256_dark-3d9a334e_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..d551a6c9abc3a4da60aaa90dac1ddbb9802ddd83
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_mobilenetv2](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0611 | [ckpt](https://download.openmmlab.com/mmpose/face/mobilenetv2/mobilenetv2_coco_wholebody_face_256x256-4a3f096e_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/mobilenetv2/mobilenetv2_coco_wholebody_face_256x256_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2bd4352119546e2670f4b6bd16c12d37213b099b
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0611
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/mobilenetv2/mobilenetv2_coco_wholebody_face_256x256-4a3f096e_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..e4609385bdc230558581a05f8ee0fe73b6b248b2
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.md
@@ -0,0 +1,55 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_res50](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_res50_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0582 | [ckpt](https://download.openmmlab.com/mmpose/face/resnet/res50_coco_wholebody_face_256x256-5128edf5_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/resnet/res50_coco_wholebody_face_256x256_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ef91a3da21c316335caf8d88c0ebde9a6e1bd4d7
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_res50_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_res50_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0582
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/resnet/res50_coco_wholebody_face_256x256-5128edf5_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.md b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..2710c2ff39bb02fa46949f89592c8c116234a63b
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody-Face val set
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------ | :--------: | :----: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [pose_scnet_50](/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256.py) | 256x256 | 0.0567 | [ckpt](https://download.openmmlab.com/mmpose/face/scnet/scnet50_coco_wholebody_face_256x256-a0183f5f_20210909.pth) | [log](https://download.openmmlab.com/mmpose/face/scnet/scnet50_coco_wholebody_face_256x256_20210909.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.yml b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d3b052ffc51e133706d36246caae80563ac7edcb
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.yml
@@ -0,0 +1,15 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - SCNet
+ Training Data: COCO-WholeBody-Face
+ Name: td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Face
+ Metrics:
+ NME: 0.0567
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/scnet/scnet50_coco_wholebody_face_256x256-a0183f5f_20210909.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..0e6f5c5c9084bf03ec95e203c57bad4a91ce7179
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hourglass52_8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=68,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..dfeac90ced1307eeaa8fe9c83c59a3ae67b1cb23
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,156 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=68,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..3c34f9aa5dc733f6dd1363212791b7f2c5b7f447
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_hrnetv2-w18_dark-8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,160 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=68,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f1a8629fc7448a4edc5e3a98b554b615efb7102
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_mobilenetv2_8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://mobilenet_v2')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=68,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_res50_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_res50_8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..0070e55d69d26b5e50edfef7868dc4faa5b0b5f4
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_res50_8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=68,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..8f79f4b1d362b527cd684ae927e61cf17ec821cd
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/td-hm_scnet50_8xb32-60e_coco-wholebody-face-256x256.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet50-7ef0a199.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=68,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyFaceDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.md b/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.md
new file mode 100644
index 0000000000000000000000000000000000000000..b99f91f3d180287081543a27c6e61818092b3b1c
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.md
@@ -0,0 +1,42 @@
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on COFW dataset
+
+The model is trained on COFW train.
+
+| Arch | Input Size | NME | ckpt | log |
+| :------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :------------------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/cofw/td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256.py) | 256x256 | 3.48 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_cofw_256x256-49243ab8_20211019.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_cofw_256x256_20211019.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.yml b/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..733e275685de62a483d48e2ec7eedf347d6d0e51
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.yml
@@ -0,0 +1,14 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/cofw/td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: COFW
+ Name: td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256
+ Results:
+ - Dataset: COFW
+ Metrics:
+ NME: 3.48
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_cofw_256x256-49243ab8_20211019.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/cofw/td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/cofw/td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..7c52342e950246755a9e5c0ed60302da936bb6fe
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/cofw/td-hm_hrnetv2-w18_8xb64-60e_cofw-256x256.py
@@ -0,0 +1,161 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=50,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=1.5)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=29,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'COFWDataset'
+data_mode = 'topdown'
+data_root = 'data/cofw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/cofw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/cofw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.md b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..53d5c3b36d7c61e9f6db3542b047adda70e70a86
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.md
@@ -0,0 +1,59 @@
+
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+AdaptiveWingloss (ICCV'2019)
+ +```bibtex +@inproceedings{wang2019adaptive, + title={Adaptive wing loss for robust face alignment via heatmap regression}, + author={Wang, Xinyao and Bo, Liefeng and Fuxin, Li}, + booktitle={Proceedings of the IEEE/CVF international conference on computer vision}, + pages={6971--6981}, + year={2019} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train.
+
+| Arch | Input Size | NME*test* | NME*pose* | NME*illumination* | NME*occlusion* | NME*blur* | NME*makeup* | NME*expression* | ckpt | log |
+| :--------- | :--------: | :------------------: | :------------------: | :--------------------------: | :-----------------------: | :------------------: | :--------------------: | :------------------------: | :--------: | :-------: |
+| [pose_hrnetv2_w18_awing](/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256.py) | 256x256 | 4.02 | 6.94 | 3.97 | 4.78 | 4.59 | 3.87 | 4.28 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256_awing-5af5055c_20211212.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256_awing_20211212.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.yml b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6ba45c82b7499f09e0664ef42589e46ec298aca9
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.yml
@@ -0,0 +1,21 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - AdaptiveWingloss
+ Training Data: WFLW
+ Name: td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME blur: 4.59
+ NME expression: 4.28
+ NME illumination: 3.97
+ NME makeup: 3.87
+ NME occlusion: 4.78
+ NME pose: 6.94
+ NME test: 4.02
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256_awing-5af5055c_20211212.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.md b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..476afb6c01c1a2f57c2030f673a913654b5a4698
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.md
@@ -0,0 +1,59 @@
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train.
+
+| Arch | Input Size | NME*test* | NME*pose* | NME*illumination* | NME*occlusion* | NME*blur* | NME*makeup* | NME*expression* | ckpt | log |
+| :--------- | :--------: | :------------------: | :------------------: | :--------------------------: | :-----------------------: | :------------------: | :--------------------: | :------------------------: | :--------: | :-------: |
+| [pose_hrnetv2_w18_dark](/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256.py) | 256x256 | 3.98 | 6.98 | 3.96 | 4.78 | 4.56 | 3.89 | 4.29 | [ckpt](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_wflw_256x256_dark-3f8e0c2c_20210125.pth) | [log](https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_wflw_256x256_dark_20210125.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.yml b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..bbb82185cf0f4be034cb31f4a8166128d522938e
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.yml
@@ -0,0 +1,21 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: WFLW
+ Name: td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME blur: 4.56
+ NME expression: 4.29
+ NME illumination: 3.96
+ NME makeup: 3.89
+ NME occlusion: 4.78
+ NME pose: 6.98
+ NME test: 3.98
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/darkpose/hrnetv2_w18_wflw_256x256_dark-3f8e0c2c_20210125.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.md b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..c9b8eec0669a73d60b2023eefa84204e71c7d1d0
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.md
@@ -0,0 +1,42 @@
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train.
+
+| Arch | Input Size | NME*test* | NME*pose* | NME*illumination* | NME*occlusion* | NME*blur* | NME*makeup* | NME*expression* | ckpt | log |
+| :--------- | :--------: | :------------------: | :------------------: | :--------------------------: | :-----------------------: | :------------------: | :--------------------: | :------------------------: | :--------: | :-------: |
+| [pose_hrnetv2_w18](/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256.py) | 256x256 | 4.06 | 6.97 | 3.99 | 4.83 | 4.58 | 3.94 | 4.33 | [ckpt](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256-2bf032a6_20210125.pth) | [log](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256_20210125.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.yml b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9124324f8b8fe8ca7d1835471b130013cee13efa
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.yml
@@ -0,0 +1,20 @@
+Models:
+- Config: configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: WFLW
+ Name: td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME blur: 4.58
+ NME expression: 4.33
+ NME illumination: 3.99
+ NME makeup: 3.94
+ NME occlusion: 4.83
+ NME pose: 6.97
+ NME test: 4.06
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_wflw_256x256-2bf032a6_20210125.pth
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ae373c816aec3e09f7780f304ce11687e48b8e32
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_8xb64-60e_wflw-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=98,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ada24a97bb7954d42b2d300ea9e8a14b494da938
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_awing-8xb64-60e_wflw-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=98,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='AdaptiveWingLoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..973a850f3fdf2ab6300e8e56c4e1b92b15d3f63a
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_heatmap/wflw/td-hm_hrnetv2-w18_dark-8xb64-60e_wflw-256x256.py
@@ -0,0 +1,162 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=60, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=2e-3,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=60,
+ milestones=[40, 55],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18'),
+ ),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=98,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_prob=0,
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_regression/README.md b/configs/face_2d_keypoint/topdown_regression/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..5d20cb9a311c033eef1b8668b2d9d0e5c56e6514
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/README.md
@@ -0,0 +1,19 @@
+# Top-down regression-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. At the 2nd stage, regression based methods directly regress the keypoint coordinates given the features extracted from the bounding box area, following the paradigm introduced in [Deeppose: Human pose estimation via deep neural networks](http://openaccess.thecvf.com/content_cvpr_2014/html/Toshev_DeepPose_Human_Pose_2014_CVPR_paper.html).
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+## Results and Models
+
+### WFLW Dataset
+
+Result on WFLW test set
+
+| Model | Input Size | NME | ckpt | log |
+| :-------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [ResNet-50](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py) | 256x256 | 4.88 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256-92d0ba7f_20210303.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_20210303.log.json) |
+| [ResNet-50+WingLoss](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py) | 256x256 | 4.67 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_wingloss-f82a5e53_20210303.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_wingloss_20210303.log.json) |
+| [ResNet-50+SoftWingLoss](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py) | 256x256 | 4.44 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_softwingloss-4d34f22a_20211212.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_softwingloss_20211212.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.md b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..f1d9629d0ad0caced74cb3b0f4781080c302588f
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.md
@@ -0,0 +1,75 @@
+
+
+
+
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+
+
+SoftWingloss (TIP'2021)
+ +```bibtex +@article{lin2021structure, + title={Structure-Coherent Deep Feature Learning for Robust Face Alignment}, + author={Lin, Chunze and Zhu, Beier and Wang, Quan and Liao, Renjie and Qian, Chen and Lu, Jiwen and Zhou, Jie}, + journal={IEEE Transactions on Image Processing}, + year={2021}, + publisher={IEEE} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train set.
+
+| Model | Input Size | NME | ckpt | log |
+| :-------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [ResNet-50+SoftWingLoss](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py) | 256x256 | 4.44 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_softwingloss-4d34f22a_20211212.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_softwingloss_20211212.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.yml b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..bf7c8436e09a88b4cb8c42a560b567c1b51862a7
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.yml
@@ -0,0 +1,22 @@
+Collections:
+- Name: SoftWingloss
+ Paper:
+ Title: Structure-Coherent Deep Feature Learning for Robust Face Alignment
+ URL: https://ieeexplore.ieee.org/document/9442331/
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/softwingloss.md
+Models:
+- Config: configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py
+ In Collection: SoftWingloss
+ Metadata:
+ Architecture:
+ - DeepPose
+ - ResNet
+ - SoftWingloss
+ Training Data: WFLW
+ Name: td-reg_res50_softwingloss_8xb64-210e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME: 4.44
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_softwingloss-4d34f22a_20211212.pth
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.md b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..1ec3e76dbad52d30e8ce1c458592ec13e6c8ee31
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.md
@@ -0,0 +1,58 @@
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train set.
+
+| Model | Input Size | NME | ckpt | log |
+| :-------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [ResNet-50](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py) | 256x256 | 4.88 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256-92d0ba7f_20210303.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_20210303.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.yml b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f59689a7a9977e9599c96c41021b980f6d78555f
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.yml
@@ -0,0 +1,21 @@
+Collections:
+- Name: ResNet
+ Paper:
+ Title: Deep residual learning for image recognition
+ URL: http://openaccess.thecvf.com/content_cvpr_2016/html/He_Deep_Residual_Learning_CVPR_2016_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/backbones/resnet.md
+Models:
+- Config: configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py
+ In Collection: ResNet
+ Metadata:
+ Architecture:
+ - DeepPose
+ - ResNet
+ Training Data: WFLW
+ Name: td-reg_res50_8x64e-210e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME: 4.88
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256-92d0ba7f_20210303.pth
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.md b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..51477143d11c1755f9280026641ba68b954ec99e
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.md
@@ -0,0 +1,76 @@
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+
+
+Wingloss (CVPR'2018)
+ +```bibtex +@inproceedings{feng2018wing, + title={Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks}, + author={Feng, Zhen-Hua and Kittler, Josef and Awais, Muhammad and Huber, Patrik and Wu, Xiao-Jun}, + booktitle={Computer Vision and Pattern Recognition (CVPR), 2018 IEEE Conference on}, + year={2018}, + pages ={2235-2245}, + organization={IEEE} +} +``` + +
+
+
+Results on WFLW dataset
+
+The model is trained on WFLW train set.
+
+| Model | Input Size | NME | ckpt | log |
+| :-------------------------------------------------------------- | :--------: | :--: | :------------------------------------------------------------: | :-----------------------------------------------------------: |
+| [ResNet-50+WingLoss](/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py) | 256x256 | 4.67 | [ckpt](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_wingloss-f82a5e53_20210303.pth) | [log](https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_wingloss_20210303.log.json) |
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.yml b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.yml
new file mode 100644
index 0000000000000000000000000000000000000000..da737de7cd76afd4e8ee962730b30f1961793de0
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.yml
@@ -0,0 +1,23 @@
+Collections:
+- Name: Wingloss
+ Paper:
+ Title: Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural
+ Networks
+ URL: http://openaccess.thecvf.com/content_cvpr_2018/html/Feng_Wing_Loss_for_CVPR_2018_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/main/docs/src/papers/techniques/wingloss.md
+Models:
+- Config: configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py
+ In Collection: Wingloss
+ Metadata:
+ Architecture:
+ - DeepPose
+ - ResNet
+ - WingLoss
+ Training Data: WFLW
+ Name: td-reg_res50_wingloss_8xb64-210e_wflw-256x256
+ Results:
+ - Dataset: WFLW
+ Metrics:
+ NME: 4.67
+ Task: Face 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/face/deeppose/deeppose_res50_wflw_256x256_wingloss-f82a5e53_20210303.pth
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..2742f497b8fbdd7889281c660b9ccd804ccf754d
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_8xb64-210e_wflw-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=98,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ train_cfg=dict(),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# dataloaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less'))
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..eb4199073d712024f0495746ad902f4ea4dd9052
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_softwingloss_8xb64-210e_wflw-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=98,
+ loss=dict(type='SoftWingLoss', use_target_weight=True),
+ decoder=codec),
+ train_cfg=dict(),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# dataloaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less'))
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ab519cd401bbd07212e4834c9a5d655418b49fb1
--- /dev/null
+++ b/configs/face_2d_keypoint/topdown_regression/wflw/td-reg_res50_wingloss_8xb64-210e_wflw-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=98,
+ loss=dict(type='WingLoss', use_target_weight=True),
+ decoder=codec),
+ train_cfg=dict(),
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'WFLWDataset'
+data_mode = 'topdown'
+data_root = 'data/wflw/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# dataloaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_train.json',
+ data_prefix=dict(img='images/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/face_landmarks_wflw_test.json',
+ data_prefix=dict(img='images/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='NME', rule='less'))
+
+# evaluators
+val_evaluator = dict(
+ type='NME',
+ norm_mode='keypoint_distance',
+)
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/README.md b/configs/fashion_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e7d761067afc34b6a7249faa187752b39ca24ffd
--- /dev/null
+++ b/configs/fashion_2d_keypoint/README.md
@@ -0,0 +1,7 @@
+# 2D Fashion Landmark Detection
+
+2D fashion landmark detection (also referred to as fashion alignment) aims to detect the key-point located at the functional region of clothes, for example the neckline and the cuff.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_fashion_landmark.md) to prepare data.
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/README.md b/configs/fashion_2d_keypoint/topdown_heatmap/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..865a3b823ebd65f3abd707a0db4c931cd99abcd4
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/README.md
@@ -0,0 +1,42 @@
+# Top-down heatmap-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html).
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+## Results and Models
+
+### DeepFashion Dataset
+
+Results on DeepFashion dataset with ResNet backbones:
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :-----------------: | :--------: | :-----: | :--: | :--: | :----------------------------------------------------------: |
+| HRNet-w48-UDP-Upper | 256x192 | 96.1 | 60.9 | 15.1 | [hrnet_deepfashion.md](./deepfashion/hrnet_deepfashion.md) |
+| HRNet-w48-UDP-Lower | 256x192 | 97.8 | 76.1 | 8.9 | [hrnet_deepfashion.md](./deepfashion/hrnet_deepfashion.md) |
+| HRNet-w48-UDP-Full | 256x192 | 98.3 | 67.3 | 11.7 | [hrnet_deepfashion.md](./deepfashion/hrnet_deepfashion.md) |
+| ResNet-50-Upper | 256x192 | 95.4 | 57.8 | 16.8 | [resnet_deepfashion.md](./deepfashion/resnet_deepfashion.md) |
+| ResNet-50-Lower | 256x192 | 96.5 | 74.4 | 10.5 | [resnet_deepfashion.md](./deepfashion/resnet_deepfashion.md) |
+| ResNet-50-Full | 256x192 | 97.7 | 66.4 | 12.7 | [resnet_deepfashion.md](./deepfashion/resnet_deepfashion.md) |
+
+### DeepFashion2 Dataset
+
+Results on DeepFashion2 dataset
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :-----------------------------: | :--------: | :-----: | :---: | :--: | :-----------------------------------------------------------: |
+| ResNet-50-Short-Sleeved-Shirt | 256x192 | 0.988 | 0.703 | 10.2 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Long-Sleeved-Shirt | 256x192 | 0.973 | 0.587 | 16.6 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Short-Sleeved-Outwear | 256x192 | 0.966 | 0.408 | 24.0 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Long-Sleeved-Outwear | 256x192 | 0.987 | 0.517 | 18.1 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Vest | 256x192 | 0.981 | 0.643 | 12.7 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Sling | 256x192 | 0.940 | 0.557 | 21.6 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Shorts | 256x192 | 0.975 | 0.682 | 12.4 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Trousers | 256x192 | 0.973 | 0.625 | 14.8 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Skirt | 256x192 | 0.952 | 0.653 | 16.6 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Short-Sleeved-Dress | 256x192 | 0.980 | 0.603 | 15.6 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Long-Sleeved-Dress | 256x192 | 0.976 | 0.518 | 20.1 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Vest-Dress | 256x192 | 0.980 | 0.600 | 16.0 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
+| ResNet-50-Sling-Dress | 256x192 | 0.967 | 0.544 | 19.5 | [res50_deepfashion2.md](./deepfashion2/res50_deepfashion2.md) |
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.md b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.md
new file mode 100644
index 0000000000000000000000000000000000000000..2d5e382c927535caafb94b3c51fb1cc7b9290c04
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.md
@@ -0,0 +1,77 @@
+
+
+
+
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+
+
+DeepFashion (CVPR'2016)
+ +```bibtex +@inproceedings{liuLQWTcvpr16DeepFashion, + author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou}, + title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations}, + booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2016} +} +``` + +
+
+
+Results on DeepFashion val set
+
+| Set | Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :---- | :-------------------------------------------------------: | :--------: | :-----: | :--: | :--: | :-------------------------------------------------------: | :------------------------------------------------------: |
+| upper | [pose_hrnet_w48_udp](td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_uppder-256x192.py) | 256x192 | 96.1 | 60.9 | 15.1 | [ckpt](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192-de7c0eb1_20230810.pth) | [log](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192-de7c0eb1_20230810.log) |
+| lower | [pose_hrnet_w48_udp](td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192.py) | 256x192 | 97.8 | 76.1 | 8.9 | [ckpt](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192-ddaf747d_20230810.pth) | [log](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192-ddaf747d_20230810.log) |
+| full | [pose_hrnet_w48_udp](td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192.py) | 256x192 | 98.3 | 67.3 | 11.7 | [ckpt](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192-7ab504c7_20230810.pth) | [log](https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192-7ab504c7_20230810.log) |
+
+Note: Due to the time constraints, we have only trained resnet50 models. We warmly welcome any contributions if you can successfully reproduce the results from the paper!
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.yml b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.yml
new file mode 100644
index 0000000000000000000000000000000000000000..06c297ef8ed5409ecae5c0595fa9d4e8c5f4696a
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.yml
@@ -0,0 +1,45 @@
+Models:
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ - UDP
+ Training Data: DeepFashion
+ Name: td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 76.1
+ EPE: 8.9
+ PCK@0.2: 97.8
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192-ddaf747d_20230810.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion
+ Name: td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 60.9
+ EPE: 15.1
+ PCK@0.2: 96.1
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192-de7c0eb1_20230810.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion
+ Name: td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 67.3
+ EPE: 11.7
+ PCK@0.2: 98.3
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192-7ab504c7_20230810.pth
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.md b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.md
new file mode 100644
index 0000000000000000000000000000000000000000..cb5c3c1c84fb6640bf427c39c559c98d75fb274c
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.md
@@ -0,0 +1,77 @@
+
+
+DeepFashion (ECCV'2016)
+ +```bibtex +@inproceedings{liuYLWTeccv16FashionLandmark, + author = {Liu, Ziwei and Yan, Sijie and Luo, Ping and Wang, Xiaogang and Tang, Xiaoou}, + title = {Fashion Landmark Detection in the Wild}, + booktitle = {European Conference on Computer Vision (ECCV)}, + month = {October}, + year = {2016} + } +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+
+
+DeepFashion (CVPR'2016)
+ +```bibtex +@inproceedings{liuLQWTcvpr16DeepFashion, + author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou}, + title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations}, + booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2016} +} +``` + +
+
+
+Results on DeepFashion val set
+
+| Set | Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :---- | :-------------------------------------------------------: | :--------: | :-----: | :--: | :--: | :-------------------------------------------------------: | :------------------------------------------------------: |
+| upper | [pose_resnet_50](td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py) | 256x192 | 95.4 | 57.8 | 16.8 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_upper_256x192-41794f03_20210124.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_upper_256x192_20210124.log.json) |
+| lower | [pose_resnet_50](td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py) | 256x192 | 96.5 | 74.4 | 10.5 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_lower_256x192-1292a839_20210124.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_lower_256x192_20210124.log.json) |
+| full | [pose_resnet_50](td-hm_res50_8xb64-210e_deepfashion_full-256x192.py) | 256x192 | 97.7 | 66.4 | 12.7 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_full_256x192-0dbd6e42_20210124.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_full_256x192_20210124.log.json) |
+
+Note: Due to the time constraints, we have only trained resnet50 models. We warmly welcome any contributions if you can successfully reproduce the results from the paper!
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.yml b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1c382ee2d5cb792cbf1e2d135a27a435dbd52390
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.yml
@@ -0,0 +1,51 @@
+Collections:
+- Name: SimpleBaseline2D
+ Paper:
+ Title: Simple baselines for human pose estimation and tracking
+ URL: http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html
+ README: https://github.com/open-mmlab/mmpose/blob/master/docs/en/papers/algorithms/simplebaseline2d.md
+Models:
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: DeepFashion
+ Name: td-hm_res50_8xb64-210e_deepfashion_upper-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 57.8
+ EPE: 16.8
+ PCK@0.2: 95.4
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_upper_256x192-41794f03_20210124.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion
+ Name: td-hm_res50_8xb64-210e_deepfashion_lower-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 74.4
+ EPE: 96.5
+ PCK@0.2: 10.5
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_lower_256x192-1292a839_20210124.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_full-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion
+ Name: td-hm_res50_8xb64-210e_deepfashion_full-256x192
+ Results:
+ - Dataset: DeepFashion
+ Metrics:
+ AUC: 66.4
+ EPE: 12.7
+ PCK@0.2: 97.7
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion_full_256x192-0dbd6e42_20210124.pth
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4a30ead782415117e309c6bba4da904740e6c884
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_full-256x192.py
@@ -0,0 +1,169 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=8,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..0a86c38ba8161bdb129db09e87d64c964242877a
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,169 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=4,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7d6af18fd947fb480b6977aa9f3b28ee0e6c1e30
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_8xb64-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,169 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=6,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8977c25b56930ca89774a4147edc385b994eeb7f
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_full-256x192.py
@@ -0,0 +1,26 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_full-256x192.py'
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..595035b132f954cfcd58c8b23de410ef6f710e8b
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,26 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_lower-256x192.py'
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..777ffddb22047daf7b1183f530f8509495fc92ce
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w32_udp_8xb64-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,26 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_upper-256x192.py'
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..bf7a80d59f8c81ffdbd2f8e3764c32019561812b
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_full-256x192.py
@@ -0,0 +1,42 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_full-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(in_channels=48))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..a26e3f0cd43950ec6e56f1ef02b8c726f2abce4b
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,42 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_lower-256x192.py' # noqa
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(in_channels=48))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..cd619bd96307420cbf6885a73df2b4f5b2635783
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_8xb32-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,42 @@
+_base_ = './td-hm_hrnet-w32_8xb64-210e_deepfashion_upper-256x192.py' # noqa
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(in_channels=48))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..5445d7d377ddae776760b81c6e12249d697a1928
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_full-256x192.py
@@ -0,0 +1,31 @@
+_base_ = './td-hm_hrnet-w48_8xb32-210e_deepfashion_full-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..c7c5c0966653b59f4a5e84f188bd226793ec8ab6
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,31 @@
+_base_ = './td-hm_hrnet-w48_8xb32-210e_deepfashion_lower-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..706a87da84d006582078f34774b70a70e38d553f
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_hrnet-w48_udp_8xb32-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,31 @@
+_base_ = './td-hm_hrnet-w48_8xb32-210e_deepfashion_upper-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+model = dict(
+ test_cfg=dict(flip_test=True, flip_mode='heatmap', shift_heatmap=False))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size'], use_udp=True),
+ dict(type='PackPoseInputs')
+]
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..57e9558f7602b07b26fbb198e4d6fb3233e2e9e8
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_full-256x192.py
@@ -0,0 +1,8 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_full-256x192.py'
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..0073adfdfbcc9cd1695f6fc28776da6df4fa110b
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,8 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py'
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..cf2198fa2804547f17afd037e4f4e282f4ca2b63
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res101_8xb64-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,8 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py'
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..04dee6d3a5f4811588fa42d6fa821e9d1883b52e
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_full-256x192.py
@@ -0,0 +1,13 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_full-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet152')))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ef4b3d57d300f7645c08ba5e3f4de378b449c80f
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,13 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet152')))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..122ad6817ac9d7d763b99d72f01e4f69b1721953
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res152_8xb32-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,13 @@
+_base_ = './td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py'
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet152')))
+
+train_dataloader = dict(batch_size=32)
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_full-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_full-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..292e83cb12dfcfeb4193d2be8d9844cf11816a4f
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_full-256x192.py
@@ -0,0 +1,140 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=8,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='full',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_full_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..51e4ddfcbd251a47925682edd4017a18a8af0f03
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_lower-256x192.py
@@ -0,0 +1,140 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=64)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=4,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='lower',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_lower_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..29663966904fbd994d274b4a5ecf8c6393ec8ad5
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/td-hm_res50_8xb64-210e_deepfashion_upper-256x192.py
@@ -0,0 +1,140 @@
+_base_ = '../../../_base_/default_runtime.py'
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=64)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=6,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashionDataset'
+data_mode = 'topdown'
+data_root = 'data/fld/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+test_pipeline = val_pipeline
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_train.json',
+ data_prefix=dict(img='img/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_val.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ subset='upper',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/fld_upper_test.json',
+ data_prefix=dict(img='img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfashion2.md b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfashion2.md
new file mode 100644
index 0000000000000000000000000000000000000000..1dcfd593133c95f744869ff23bd2ec12a54e187c
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfashion2.md
@@ -0,0 +1,67 @@
+
+
+DeepFashion (ECCV'2016)
+ +```bibtex +@inproceedings{liuYLWTeccv16FashionLandmark, + author = {Liu, Ziwei and Yan, Sijie and Luo, Ping and Wang, Xiaogang and Tang, Xiaoou}, + title = {Fashion Landmark Detection in the Wild}, + booktitle = {European Conference on Computer Vision (ECCV)}, + month = {October}, + year = {2016} + } +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on DeepFashion2 val set
+
+| Set | Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :-------------------- | :-------------------------------------------------: | :--------: | :-----: | :---: | :--: | :-------------------------------------------------: | :-------------------------------------------------: |
+| short_sleeved_shirt | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192.py) | 256x192 | 0.988 | 0.703 | 10.2 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_shirt_256x192-21e1c5da_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_shirt_256x192_20221208.log.json) |
+| long_sleeved_shirt | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192.py) | 256x192 | 0.973 | 0.587 | 16.6 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_shirt_256x192-8679e7e3_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_shirt_256x192_20221208.log.json) |
+| short_sleeved_outwear | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192.py) | 256x192 | 0.966 | 0.408 | 24.0 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_outwear_256x192-a04c1298_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_outwear_256x192_20221208.log.json) |
+| long_sleeved_outwear | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192.py) | 256x192 | 0.987 | 0.517 | 18.1 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_outwear_256x192-31fbaecf_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_outwear_256x192_20221208.log.json) |
+| vest | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-vest-256x192.py) | 256x192 | 0.981 | 0.643 | 12.7 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_256x192-4c48d05c_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_256x192_20221208.log.json) |
+| sling | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-256x192.py) | 256x192 | 0.940 | 0.557 | 21.6 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_256x192-ebb2b736_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_256x192_20221208.log.json) |
+| shorts | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192.py) | 256x192 | 0.975 | 0.682 | 12.4 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_shorts_256x192-9ab23592_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_shorts_256x192_20221208.log.json) |
+| trousers | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192.py) | 256x192 | 0.973 | 0.625 | 14.8 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_trousers_256x192-3e632257_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_trousers_256x192_20221208.log.json) |
+| skirt | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192.py) | 256x192 | 0.952 | 0.653 | 16.6 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_skirt_256x192-09573469_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_skirt_256x192_20221208.log.json) |
+| short_sleeved_dress | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192.py) | 256x192 | 0.980 | 0.603 | 15.6 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_dress_256x192-1345b07a_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_dress_256x192_20221208.log.json) |
+| long_sleeved_dress | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192.py) | 256x192 | 0.976 | 0.518 | 20.1 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_dress_256x192-87bac74e_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_dress_256x192_20221208.log.json) |
+| vest_dress | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192.py) | 256x192 | 0.980 | 0.600 | 16.0 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_dress_256x192-fb3fbd6f_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_dress_256x192_20221208.log.json) |
+| sling_dress | [pose_resnet_50](/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192.py) | 256x192 | 0.967 | 0.544 | 19.5 | [ckpt](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_dress_256x192-8ebae0eb_20221208.pth) | [log](https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_dress_256x192_20221208.log.json) |
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfasion2.yml b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfasion2.yml
new file mode 100644
index 0000000000000000000000000000000000000000..28825fa01100a9375f4640eb89575e829608ac37
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfasion2.yml
@@ -0,0 +1,185 @@
+Models:
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: DeepFashion2
+ Name: td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.703
+ EPE: 10.2
+ PCK@0.2: 0.988
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_shirt_256x192-21e1c5da_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.587
+ EPE: 16.5
+ PCK@0.2: 0.973
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_shirt_256x192-8679e7e3_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.408
+ EPE: 24.0
+ PCK@0.2: 0.966
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_outwear_256x192-a04c1298_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.517
+ EPE: 18.1
+ PCK@0.2: 0.987
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_outwear_256x192-31fbaecf_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-vest-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_4xb64-210e_deepfasion2-vest-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.643
+ EPE: 12.7
+ PCK@0.2: 0.981
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_256x192-4c48d05c_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_4xb64-210e_deepfasion2-sling-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.557
+ EPE: 21.6
+ PCK@0.2: 0.94
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_256x192-ebb2b736_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.682
+ EPE: 12.4
+ PCK@0.2: 0.975
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_shorts_256x192-9ab23592_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.625
+ EPE: 14.8
+ PCK@0.2: 0.973
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_trousers_256x192-3e632257_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.653
+ EPE: 16.6
+ PCK@0.2: 0.952
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_skirt_256x192-09573469_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.603
+ EPE: 15.6
+ PCK@0.2: 0.98
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_short_sleeved_dress_256x192-1345b07a_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.518
+ EPE: 20.1
+ PCK@0.2: 0.976
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_long_sleeved_dress_256x192-87bac74e_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.6
+ EPE: 16.0
+ PCK@0.2: 0.98
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_vest_dress_256x192-fb3fbd6f_20221208.pth
+- Config: configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: DeepFashion2
+ Name: td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192
+ Results:
+ - Dataset: DeepFashion2
+ Metrics:
+ AUC: 0.544
+ EPE: 19.5
+ PCK@0.2: 0.967
+ Task: Fashion 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/fashion/resnet/res50_deepfashion2_sling_dress_256x192-8ebae0eb_20221208.pth
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..09dfaaa390bb2020e4a511d6ba111d35d5fa4378
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-long-sleeved-dress-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=64)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_long_sleeved_dress_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_long_sleeved_dress_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f0e6f0c63218874f4e40bdd06eb0cbc57b9365a7
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-skirt-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=64)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_skirt_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_skirt_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..9bed7421991041145f028e2b91689b8c5125d205
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_1xb64-210e_deepfasion2-vest-dress-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=64)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_vest_dress_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_vest_dress_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..617e59ae74be40511256c2b9e358300ea2348f27
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_2xb64-210e_deepfasion2-trousers-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=128)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_trousers_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_trousers_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..aa3b2774fcaedf9c7ace5a335775011e6c0a7d29
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_3xb64-210e_deepfasion2-shorts-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=192)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_shorts_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_shorts_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..0bfcabaa5478596cc026309e5f57e6ea5db83abc
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-short-sleeved-dress-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_short_sleeved_dress_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_short_sleeved_dress_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f627eb182c90b57ae53a4a9141f00ed333d3e229
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_sling_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_sling_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8b59607060c41a8ddbb4d38c5acc41e243cd2e96
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-sling-dress-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_sling_dress_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_sling_dress_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-vest-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-vest-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4249d5a8971e80a4e068e51543b9191f36488542
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_4xb64-210e_deepfasion2-vest-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_vest_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_vest_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..4161952dcf31904e8df8c70ff25ca207c1cea2ae
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_6xb64-210e_deepfasion2-short-sleeved-shirt-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=384)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_short_sleeved_shirt_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_short_sleeved_shirt_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..36e0318bf7a954fdbd35a8b59219a6cde2396df2
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-outwear-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_long_sleeved_outwear_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/'
+ 'deepfashion2_long_sleeved_outwear_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..f82e3cb5fb04011130521a35080b00f01a70ac68
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-long-sleeved-shirt-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_long_sleeved_shirt_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/deepfashion2_long_sleeved_shirt_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192.py b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..30db99de9e96eaede42332daae3d55f578b941f2
--- /dev/null
+++ b/configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/td-hm_res50_8xb64-210e_deepfasion2-short-sleeved-outwear-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=10),
+ checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=294,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'DeepFashion2Dataset'
+data_mode = 'topdown'
+data_root = 'data/deepfasion2/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='train/deepfashion2_short_sleeved_outwear_train.json',
+ data_prefix=dict(img='train/image/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='validation/'
+ 'deepfashion2_short_sleeved_outwear_validation.json',
+ data_prefix=dict(img='validation/image/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/README.md b/configs/hand_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..6f7758290eb914b88662e685135748c1fb5f665d
--- /dev/null
+++ b/configs/hand_2d_keypoint/README.md
@@ -0,0 +1,18 @@
+# 2D Hand Pose Estimation
+
+2D hand pose estimation is defined as the task of detecting the poses (or keypoints) of the hand from an input image.
+
+Normally, the input images are cropped hand images, where the hand locates at the center;
+or the rough location (or the bounding box) of the hand is provided.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_hand_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/2d_hand_demo.md) to run demos.
+
+DeepFashion2 (CVPR'2019)
+ +```bibtex +@article{DeepFashion2, + author = {Yuying Ge and Ruimao Zhang and Lingyun Wu and Xiaogang Wang and Xiaoou Tang and Ping Luo}, + title={A Versatile Benchmark for Detection, Pose Estimation, Segmentation and Re-Identification of Clothing Images}, + journal={CVPR}, + year={2019} +} +``` + +
+ +

diff --git a/configs/hand_2d_keypoint/rtmpose/README.md b/configs/hand_2d_keypoint/rtmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..9687b7e72c98376a00570389e7f1d003b4ace8f0 --- /dev/null +++ b/configs/hand_2d_keypoint/rtmpose/README.md @@ -0,0 +1,16 @@ +# RTMPose + +Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency. +In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose. +Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves **67.0% AP** on COCO-WholeBody with **130+ FPS**, outperforming existing open-source libraries. +To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device. + +## Results and Models + +### COCO-WholeBody-Hand Dataset + +Results on COCO-WholeBody-Hand val set + +| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download | +| :-------: | :--------: | :-----: | :---: | :--: | :------------------------------------------------------------------------------------: | +| RTMPose-m | 256x256 | 0.815 | 0.837 | 4.51 | [rtmpose_coco_wholebody_hand.md](./coco_wholebody_hand/rtmpose_coco_wholebody_hand.md) | diff --git a/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py new file mode 100644 index 0000000000000000000000000000000000000000..48c719339443eac75dfb4849553294751fc2f62d --- /dev/null +++ b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py @@ -0,0 +1,232 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# runtime +max_epochs = 210 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=256) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=(256, 256), + sigma=(5.66, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type='RTMCCHead', + in_channels=768, + out_channels=21, + input_size=codec['input_size'], + in_featuremap_size=tuple([s // 32 for s in codec['input_size']]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = 'CocoWholeBodyHandDataset' +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + # dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], + rotate_factor=180), + dict(type='RandomFlip', direction='horizontal'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] + +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + # dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=180), + dict(type='RandomFlip', direction='horizontal'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='mmdet.YOLOXHSVRandomAug'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') +] + +# data loaders +train_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=32, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = [ + dict(type='PCKAccuracy', thr=0.2), + dict(type='AUC'), + dict(type='EPE') +] +test_evaluator = val_evaluator diff --git a/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.md b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.md new file mode 100644 index 0000000000000000000000000000000000000000..b2a5957e6ec3850423188c4fde9fd4aeae9853ee --- /dev/null +++ b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.md @@ -0,0 +1,39 @@ + + +
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [rtmpose_m](/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.815 | 0.837 | 4.51 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-hand_pt-aic-coco_210e-256x256-99477206_20230228.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-hand_pt-aic-coco_210e-256x256-99477206_20230228.json) |
diff --git a/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b0f9d9ac3c575f094ca1ef3ea40ef9a5ccf63b07
--- /dev/null
+++ b/configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture:
+ - RTMPose
+ Training Data: COCO-WholeBody-Hand
+ Name: rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.815
+ EPE: 4.51
+ PCK@0.2: 0.837
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody-hand_pt-aic-coco_210e-256x256-99477206_20230228.pth
diff --git a/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..f329f1cb1df65ad7cff2ed255d6d89e859e78ea2
--- /dev/null
+++ b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py
@@ -0,0 +1,380 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# coco-hand onehand10k freihand2d rhd2d halpehand
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 10
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(256, 256),
+ sigma=(5.66, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=21,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ # dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5],
+ rotate_factor=180),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ # dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=180),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.2),
+ dict(type='MedianBlur', p=0.2),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# train datasets
+dataset_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='detection/coco/train2017/'),
+ pipeline=[],
+)
+
+dataset_onehand10k = dict(
+ type='OneHand10KDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='onehand10k/annotations/onehand10k_train.json',
+ data_prefix=dict(img='pose/OneHand10K/'),
+ pipeline=[],
+)
+
+dataset_freihand = dict(
+ type='FreiHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='freihand/annotations/freihand_train.json',
+ data_prefix=dict(img='pose/FreiHand/'),
+ pipeline=[],
+)
+
+dataset_rhd = dict(
+ type='Rhd2DDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='rhd/annotations/rhd_train.json',
+ data_prefix=dict(img='pose/RHD/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=21,
+ mapping=[
+ (0, 0),
+ (1, 4),
+ (2, 3),
+ (3, 2),
+ (4, 1),
+ (5, 8),
+ (6, 7),
+ (7, 6),
+ (8, 5),
+ (9, 12),
+ (10, 11),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+ (15, 14),
+ (16, 13),
+ (17, 20),
+ (18, 19),
+ (19, 18),
+ (20, 17),
+ ])
+ ],
+)
+
+dataset_halpehand = dict(
+ type='HalpeHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015/'),
+ pipeline=[],
+)
+
+# data loaders
+train_dataloader = dict(
+ batch_size=256,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(
+ from_file='configs/_base_/datasets/coco_wholebody_hand.py'),
+ datasets=[
+ dataset_coco, dataset_onehand10k, dataset_freihand, dataset_rhd,
+ dataset_halpehand
+ ],
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+# test datasets
+val_coco = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+val_onehand10k = dict(
+ type='OneHand10KDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='onehand10k/annotations/onehand10k_test.json',
+ data_prefix=dict(img='pose/OneHand10K/'),
+ pipeline=[],
+)
+
+val_freihand = dict(
+ type='FreiHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='freihand/annotations/freihand_test.json',
+ data_prefix=dict(img='pose/FreiHand/'),
+ pipeline=[],
+)
+
+val_rhd = dict(
+ type='Rhd2DDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='rhd/annotations/rhd_test.json',
+ data_prefix=dict(img='pose/RHD/'),
+ pipeline=[
+ dict(
+ type='KeypointConverter',
+ num_keypoints=21,
+ mapping=[
+ (0, 0),
+ (1, 4),
+ (2, 3),
+ (3, 2),
+ (4, 1),
+ (5, 8),
+ (6, 7),
+ (7, 6),
+ (8, 5),
+ (9, 12),
+ (10, 11),
+ (11, 10),
+ (12, 9),
+ (13, 16),
+ (14, 15),
+ (15, 14),
+ (16, 13),
+ (17, 20),
+ (18, 19),
+ (19, 18),
+ (20, 17),
+ ])
+ ],
+)
+
+val_halpehand = dict(
+ type='HalpeHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='halpe/annotations/halpe_val_v1.json',
+ data_prefix=dict(img='detection/coco/val2017/'),
+ pipeline=[],
+)
+
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(
+ from_file='configs/_base_/datasets/coco_wholebody_hand.py'),
+ datasets=[
+ val_coco, val_onehand10k, val_freihand, val_rhd, val_halpehand
+ ],
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+val_dataloader = test_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.md b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.md
new file mode 100644
index 0000000000000000000000000000000000000000..361770dad2ec789daf9bfde0d08b3947a8a2cf38
--- /dev/null
+++ b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.md
@@ -0,0 +1,67 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+- `Hand5` and `*` denote model trained on 5 public datasets:
+ - [COCO-Wholebody-Hand](https://github.com/jin-s13/COCO-WholeBody/)
+ - [OneHand10K](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html)
+ - [FreiHand2d](https://lmb.informatik.uni-freiburg.de/projects/freihand/)
+ - [RHD2d](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html)
+ - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe)
+
+| Config | Input Size | PCK@0.2COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +(COCO-Wholebody-Hand) | PCK@0.2
(Hand5) | AUC
(Hand5) | EPE
(Hand5) | FLOPS(G) | Download | +| :---------------------------------------: | :--------: | :-----------------------------------: | :---------------------: | :-----------------: | :-----------------: | :------: | :-----------------------------------------: | +| [RTMPose-m\*
(alpha version)](./rtmpose/hand_2d_keypoint/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 81.5 | 96.4 | 83.9 | 5.06 | 2.581 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth) | diff --git a/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.yml b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.yml new file mode 100644 index 0000000000000000000000000000000000000000..c32aa4a61c3eb98884f016a2f42e66577ac58ecd --- /dev/null +++ b/configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.yml @@ -0,0 +1,28 @@ +Collections: +- Name: RTMPose + Paper: + Title: "RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose" + URL: https://arxiv.org/abs/2303.07399 + README: https://github.com/open-mmlab/mmpose/blob/main/projects/rtmpose/README.md +Models: +- Config: configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py + In Collection: RTMPose + Alias: hand + Metadata: + Architecture: &id001 + - RTMPose + Training Data: &id002 + - COCO-Wholebody-Hand + - OneHand10K + - FreiHand2d + - RHD2d + - Halpe + Name: rtmpose-m_8xb256-210e_hand5-256x256 + Results: + - Dataset: Hand5 + Metrics: + PCK@0.2: 0.964 + AUC: 0.839 + EPE: 5.06 + Task: Hand 2D Keypoint + Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth diff --git a/configs/hand_2d_keypoint/topdown_heatmap/README.md b/configs/hand_2d_keypoint/topdown_heatmap/README.md new file mode 100644 index 0000000000000000000000000000000000000000..7f63f1f8259dd1cf52bebd3612db8ceec3d23220 --- /dev/null +++ b/configs/hand_2d_keypoint/topdown_heatmap/README.md @@ -0,0 +1,55 @@ +# Top-down heatmap-based pose estimation + +Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html). + +
+
+
+
+## Results and Models
+
+### COCO-WholeBody-Hand Dataset
+
+Results on COCO-WholeBody-Hand val set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :--------------: | :--------: | :-----: | :---: | :--: | :----------------------------------------------------------------------------------------------: |
+| HRNetv2-w18+Dark | 256x256 | 0.814 | 0.840 | 4.37 | [hrnetv2_dark_coco_wholebody_hand.md](./coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.md) |
+| HRNetv2-w18 | 256x256 | 0.813 | 0.840 | 4.39 | [hrnetv2_coco_wholebody_hand.md](./coco_wholebody_hand/hrnetv2_coco_wholebody_hand.md) |
+| HourglassNet | 256x256 | 0.804 | 0.835 | 4.54 | [hourglass_coco_wholebody_hand.md](./coco_wholebody_hand/hourglass_coco_wholebody_hand.md) |
+| SCNet-50 | 256x256 | 0.803 | 0.834 | 4.55 | [scnet_coco_wholebody_hand.md](./coco_wholebody_hand/scnet_coco_wholebody_hand.md) |
+| ResNet-50 | 256x256 | 0.800 | 0.833 | 4.64 | [resnet_coco_wholebody_hand.md](./coco_wholebody_hand/resnet_coco_wholebody_hand.md) |
+| LiteHRNet-18 | 256x256 | 0.795 | 0.830 | 4.77 | [litehrnet_coco_wholebody_hand.md](./coco_wholebody_hand/litehrnet_coco_wholebody_hand.md) |
+| MobileNet-v2 | 256x256 | 0.795 | 0.829 | 4.77 | [mobilenetv2_coco_wholebody_hand.md](./coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.md) |
+
+### FreiHand Dataset
+
+Results on FreiHand val & test set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :-------: | :--------: | :-----: | :---: | :--: | :-------------------------------------------------------: |
+| ResNet-50 | 224x224 | 0.999 | 0.868 | 3.27 | [resnet_freihand2d.md](./freihand2d/resnet_freihand2d.md) |
+
+### OneHand10K Dataset
+
+Results on OneHand10K val set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :--------------: | :--------: | :-----: | :---: | :---: | :-------------------------------------------------------------------: |
+| HRNetv2-w18+Dark | 256x256 | 0.990 | 0.572 | 23.96 | [hrnetv2_dark_onehand10k.md](./onehand10k/hrnetv2_dark_onehand10k.md) |
+| HRNetv2-w18+UDP | 256x256 | 0.990 | 0.571 | 23.88 | [hrnetv2_udp_onehand10k.md](./onehand10k/hrnetv2_udp_onehand10k.md) |
+| HRNetv2-w18 | 256x256 | 0.990 | 0.567 | 24.26 | [hrnetv2_onehand10k.md](./onehand10k/hrnetv2_onehand10k.md) |
+| ResNet-50 | 256x256 | 0.989 | 0.555 | 25.16 | [resnet_onehand10k.md](./onehand10k/resnet_onehand10k.md) |
+| MobileNet-v2 | 256x256 | 0.986 | 0.537 | 28.56 | [mobilenetv2_onehand10k.md](./onehand10k/mobilenetv2_onehand10k.md) |
+
+### RHD Dataset
+
+Results on RHD test set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :--------------: | :--------: | :-----: | :---: | :--: | :----------------------------------------------------: |
+| HRNetv2-w18+Dark | 256x256 | 0.992 | 0.903 | 2.18 | [hrnetv2_dark_rhd2d.md](./rhd2d/hrnetv2_dark_rhd2d.md) |
+| HRNetv2-w18+UDP | 256x256 | 0.992 | 0.902 | 2.19 | [hrnetv2_udp_rhd2d.md](./rhd2d/hrnetv2_udp_rhd2d.md) |
+| HRNetv2-w18 | 256x256 | 0.992 | 0.902 | 2.21 | [hrnetv2_rhd2d.md](./rhd2d/hrnetv2_rhd2d.md) |
+| ResNet-50 | 256x256 | 0.991 | 0.898 | 2.32 | [resnet_rhd2d.md](./rhd2d/resnet_rhd2d.md) |
+| MobileNet-v2 | 256x256 | 0.985 | 0.883 | 2.79 | [mobilenetv2_rhd2d.md](./rhd2d/mobilenetv2_rhd2d.md) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..4728baaba2f19ad8e6760958be21ab54dc964266
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.md
@@ -0,0 +1,39 @@
+
+
+
+
+
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_hourglass_52](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.804 | 0.835 | 4.54 | [ckpt](https://download.openmmlab.com/mmpose/hand/hourglass/hourglass52_coco_wholebody_hand_256x256-7b05c6db_20210909.pth) | [log](https://download.openmmlab.com/mmpose/hand/hourglass/hourglass52_coco_wholebody_hand_256x256_20210909.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f6247504e2b6323010a800ea7b5a1c6d01f51a99
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: Hourglass
+ Metadata:
+ Architecture:
+ - Hourglass
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.835
+ EPE: 4.54
+ PCK@0.2: 0.804
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/hourglass/hourglass52_coco_wholebody_hand_256x256-7b05c6db_20210909.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..d944ff43a268aad9f781dbea9063ae4eb000a597
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.md
@@ -0,0 +1,39 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.813 | 0.840 | 4.39 | [ckpt](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_coco_wholebody_hand_256x256-1c028db7_20210908.pth) | [log](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_coco_wholebody_hand_256x256_20210908.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f6c0046f663badee9d9b9ed0d42baaaaafe280ad
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.84
+ EPE: 4.39
+ PCK@0.2: 0.813
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_coco_wholebody_hand_256x256-1c028db7_20210908.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..73896361860d72f901b173206a29d1985a85bd65
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.md
@@ -0,0 +1,56 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_hrnetv2_w18_dark](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.814 | 0.840 | 4.37 | [ckpt](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_coco_wholebody_hand_256x256_dark-a9228c9c_20210908.pth) | [log](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_coco_wholebody_hand_256x256_dark_20210908.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..af1d607d10f4fc62e678a62676fddcf0f1752295
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.84
+ EPE: 4.37
+ PCK@0.2: 0.814
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_coco_wholebody_hand_256x256_dark-a9228c9c_20210908.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..7c084b79e1a463794988134b4403393fba540e6a
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.md
@@ -0,0 +1,37 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+LiteHRNet (CVPR'2021)
+ +```bibtex +@inproceedings{Yulitehrnet21, + title={Lite-HRNet: A Lightweight High-Resolution Network}, + author={Yu, Changqian and Xiao, Bin and Gao, Changxin and Yuan, Lu and Zhang, Lei and Sang, Nong and Wang, Jingdong}, + booktitle={CVPR}, + year={2021} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [LiteHRNet-18](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.795 | 0.830 | 4.77 | [ckpt](https://download.openmmlab.com/mmpose/hand/litehrnet/litehrnet_w18_coco_wholebody_hand_256x256-d6945e6a_20210908.pth) | [log](https://download.openmmlab.com/mmpose/hand/litehrnet/litehrnet_w18_coco_wholebody_hand_256x256_20210908.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..eeecbfe7e244b8c629fd4d621aea73a6b5694704
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: LiteHRNet
+ Metadata:
+ Architecture:
+ - LiteHRNet
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.83
+ EPE: 4.77
+ PCK@0.2: 0.795
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/litehrnet/litehrnet_w18_coco_wholebody_hand_256x256-d6945e6a_20210908.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..cc76358a8fe124d1f2bc04523e841e551590fccb
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------: | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_mobilenetv2](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.795 | 0.829 | 4.77 | [ckpt](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_coco_wholebody_hand_256x256-06b8c877_20210909.pth) | [log](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_coco_wholebody_hand_256x256_20210909.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a9d0101ce77db1d1062cfb20c9d2d80f848f0ecf
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.829
+ EPE: 4.77
+ PCK@0.2: 0.795
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_coco_wholebody_hand_256x256-06b8c877_20210909.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..ae7f287e3d250de0f9a39a0190562eb9f6e69e7c
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.md
@@ -0,0 +1,55 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------: | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_resnet_50](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.800 | 0.833 | 4.64 | [ckpt](https://download.openmmlab.com/mmpose/hand/resnet/res50_coco_wholebody_hand_256x256-8dbc750c_20210908.pth) | [log](https://download.openmmlab.com/mmpose/hand/resnet/res50_coco_wholebody_hand_256x256_20210908.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..78d16a6e459e6cbafeffb2fb14d863910a7b2144
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.833
+ EPE: 4.64
+ PCK@0.2: 0.8
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/resnet/res50_coco_wholebody_hand_256x256-8dbc750c_20210908.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.md b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..06c6fda74c6c36df1abac5a06c5d642f9eac580d
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody-Hand val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------: | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_scnet_50](/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 0.803 | 0.834 | 4.55 | [ckpt](https://download.openmmlab.com/mmpose/hand/scnet/scnet50_coco_wholebody_hand_256x256-e73414c7_20210909.pth) | [log](https://download.openmmlab.com/mmpose/hand/scnet/scnet50_coco_wholebody_hand_256x256_20210909.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.yml b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a8887b3c8eeb2be74423d845ece640af8333e1d3
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SCNet
+ Training Data: COCO-WholeBody-Hand
+ Name: td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256
+ Results:
+ - Dataset: COCO-WholeBody-Hand
+ Metrics:
+ AUC: 0.834
+ EPE: 4.55
+ PCK@0.2: 0.803
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/scnet/scnet50_coco_wholebody_hand_256x256-e73414c7_20210909.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..e0bc1c8739c9d8ea1fc585882abe5b8189087e2a
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hourglass52_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HourglassNet',
+ num_stacks=1,
+ ),
+ head=dict(
+ type='CPMHead',
+ in_channels=256,
+ out_channels=21,
+ num_stages=1,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=180.0,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..a9b9f0f281b9bc72598b9e1ffacd99f58248175d
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..5d67f393f6612aab494a47c15bd9ce7b68fc8b4d
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_hrnetv2-w18_dark-8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..f3a6150e49e687bb3d510bd7139d66bd8ac8b37f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_litehrnet-w18_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,136 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='LiteHRNet',
+ in_channels=3,
+ extra=dict(
+ stem=dict(stem_channels=32, out_channels=32, expand_ratio=1),
+ num_stages=3,
+ stages_spec=dict(
+ num_modules=(2, 4, 2),
+ num_branches=(2, 3, 4),
+ num_blocks=(2, 2, 2),
+ module_type=('LITE', 'LITE', 'LITE'),
+ with_fuse=(True, True, True),
+ reduce_ratios=(8, 8, 8),
+ num_channels=(
+ (40, 80),
+ (40, 80, 160),
+ (40, 80, 160, 320),
+ )),
+ with_head=True,
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=40,
+ out_channels=21,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..dba8538a5fe7b4313b888cae5a21f0c55b58c340
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_mobilenetv2_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,120 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(type='Pretrained', checkpoint='mmcls://mobilenet_v2')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..c04950bfaabcfebc806ce541e8d5285d0bca75be
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_res50_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,119 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..f596227c5c109fe51b0fd822c1f2b26b4abaae83
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/td-hm_scnet50_8xb32-210e_coco-wholebody-hand-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='SCNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/scnet50-7ef0a199.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyHandDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE')
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.md b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..f1a6c80132255b1cd6d029acd05add2a71f72e98
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.md
@@ -0,0 +1,56 @@
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on FreiHand val & test set
+
+| Set | Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--- | :-------------------------------------------------------: | :--------: | :-----: | :---: | :--: | :-------------------------------------------------------: | :------------------------------------------------------: |
+| test | [pose_resnet_50](/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/td-hm_res50_8xb64-100e_freihand2d-224x224.py) | 224x224 | 0.999 | 0.868 | 3.27 | [ckpt](https://download.openmmlab.com/mmpose/hand/resnet/res50_freihand_224x224-ff0799bc_20200914.pth) | [log](https://download.openmmlab.com/mmpose/hand/resnet/res50_freihand_224x224_20200914.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9937b50be6756f1b8cd3de45347cabb159919d2f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/freihand2d/td-hm_res50_8xb64-100e_freihand2d-224x224.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: FreiHand
+ Name: td-hm_res50_8xb64-100e_freihand2d-224x224
+ Results:
+ - Dataset: FreiHand
+ Metrics:
+ AUC: 0.868
+ EPE: 3.27
+ PCK@0.2: 0.999
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/resnet/res50_freihand_224x224-ff0799bc_20200914.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/td-hm_res50_8xb64-100e_freihand2d-224x224.py b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/td-hm_res50_8xb64-100e_freihand2d-224x224.py
new file mode 100644
index 0000000000000000000000000000000000000000..cd1750cdebc9d977ae917432b3e714ee1275f3d8
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/freihand2d/td-hm_res50_8xb64-100e_freihand2d-224x224.py
@@ -0,0 +1,138 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=100, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=100,
+ milestones=[50, 70],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='AUC', rule='greater', interval=1))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(224, 224), heatmap_size=(56, 56), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'FreiHandDataset'
+data_mode = 'topdown'
+data_root = 'data/freihand/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.25,
+ rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale', padding=0.8),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/freihand_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/freihand_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/freihand_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.md b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..59d70fc597094e1597440809c5b1de2d9e4a760f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.md
@@ -0,0 +1,60 @@
+
+
+FreiHand (ICCV'2019)
+ +```bibtex +@inproceedings{zimmermann2019freihand, + title={Freihand: A dataset for markerless capture of hand pose and shape from single rgb images}, + author={Zimmermann, Christian and Ceylan, Duygu and Yang, Jimei and Russell, Bryan and Argus, Max and Brox, Thomas}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={813--822}, + year={2019} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_hrnetv2_w18_dark](/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256.py) | 256x256 | 0.990 | 0.572 | 23.96 | [ckpt](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_onehand10k_256x256_dark-a2f80c64_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_onehand10k_256x256_dark_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.yml b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7fc64b75c7a445e7cae9c0350e5847b90205f87f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: OneHand10K
+ Name: td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.572
+ EPE: 23.96
+ PCK@0.2: 0.99
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_onehand10k_256x256_dark-a2f80c64_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.md b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..262bf3225390b69c8d965e02d9f78691a39b4760
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.md
@@ -0,0 +1,43 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py) | 256x256 | 0.990 | 0.567 | 24.26 | [ckpt](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.yml b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fd0c75587621aa94af22654a8a3ea80957eddc0a
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: OneHand10K
+ Name: td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.567
+ EPE: 24.26
+ PCK@0.2: 0.99
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.md b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..ca1599c116e3df24438842da11a05c713fbf99b1
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.md
@@ -0,0 +1,60 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_hrnetv2_w18_udp](/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256.py) | 256x256 | 0.990 | 0.571 | 23.88 | [ckpt](https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_onehand10k_256x256_udp-0d1b515d_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_onehand10k_256x256_udp_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.yml b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..32d5dd6db5e3f6873456dd5016bdb74a75b783cf
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256.py
+ In Collection: UDP
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - UDP
+ Training Data: OneHand10K
+ Name: td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.571
+ EPE: 23.88
+ PCK@0.2: 0.99
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_onehand10k_256x256_udp-0d1b515d_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.md b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..3f0bf9d1b76f27294712462584791657c910212e
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.md
@@ -0,0 +1,42 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_mobilenet_v2](/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256.py) | 256x256 | 0.986 | 0.537 | 28.56 | [ckpt](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_onehand10k_256x256-f3a3d90e_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_onehand10k_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.yml b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ade1f054f1b16754be9c2dddf174a85db838140d
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: OneHand10K
+ Name: td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.537
+ EPE: 28.56
+ PCK@0.2: 0.986
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_onehand10k_256x256-f3a3d90e_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.md b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..c07817d68eae7caba106695c69d6ab1746e6c5b8
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.md
@@ -0,0 +1,59 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_resnet_50](/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_res50_8xb32-210e_onehand10k-256x256.py) | 256x256 | 0.989 | 0.555 | 25.16 | [ckpt](https://download.openmmlab.com/mmpose/hand/resnet/res50_onehand10k_256x256-739c8639_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/resnet/res50_onehand10k_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.yml b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..59dc7f523f3f9d75e2451587525c36cf82ef851f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_res50_8xb32-210e_onehand10k-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: OneHand10K
+ Name: td-hm_res50_8xb32-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.555
+ EPE: 25.16
+ PCK@0.2: 0.989
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/resnet/res50_onehand10k_256x256-739c8639_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..99419065aa879884fddb6afa568257fb1b9fe340
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..610e9d149b658166a37d1fa1a028efab32d0637d
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_dark-8xb64-210e_onehand10k-256x256.py
@@ -0,0 +1,162 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..54e2220d636601ac4a19a116aa6d0aabe138dbef
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_udp-8xb64-210e_onehand10k-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..1f4e61c37c5692b62d407f642e23b38197e23d47
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_mobilenetv2_8xb64-210e_onehand10k-256x256.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='mmcls://mobilenet_v2',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_res50_8xb32-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_res50_8xb32-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..36589d899ddd930143749845b5fd5650917d23ec
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_res50_8xb32-210e_onehand10k-256x256.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.md b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..334d97978c1dbb9b7ddca0df13f75372d753a067
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.md
@@ -0,0 +1,58 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_hrnetv2_w18_dark](/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.992 | 0.903 | 2.18 | [ckpt](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_rhd2d_256x256_dark-4df3a347_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_rhd2d_256x256_dark_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7400dc19e019f605efe6688de5be8170c1aa2c4b
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - DarkPose
+ Training Data: RHD
+ Name: td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.903
+ EPE: 2.18
+ PCK@0.2: 0.992
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/dark/hrnetv2_w18_rhd2d_256x256_dark-4df3a347_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.md b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..6fe91fe17b3ef52fdd65751dab103641202c5595
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.md
@@ -0,0 +1,41 @@
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_hrnetv2_w18](/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.992 | 0.902 | 2.21 | [ckpt](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_rhd2d_256x256-95b20dd8_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_rhd2d_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f5292da7706f8a51a7a52a9dc98371ec9705aff5
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.yml
@@ -0,0 +1,16 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256.py
+ In Collection: HRNetv2
+ Metadata:
+ Architecture:
+ - HRNetv2
+ Training Data: RHD
+ Name: td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.902
+ EPE: 2.21
+ PCK@0.2: 0.992
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_rhd2d_256x256-95b20dd8_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.md b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..c494eb8fc6b79e310f3b9099cf0cfc6059ce4f8c
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.md
@@ -0,0 +1,58 @@
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCKh@0.7 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :------: | :---: | :--: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [pose_hrnetv2_w18_udp](/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.992 | 0.902 | 2.19 | [ckpt](https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_rhd2d_256x256_udp-63ba6007_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_rhd2d_256x256_udp_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..db63b682e2fc50570d118a3755d9e64285fb6fe5
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256.py
+ In Collection: UDP
+ Metadata:
+ Architecture:
+ - HRNetv2
+ - UDP
+ Training Data: RHD
+ Name: td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.902
+ EPE: 2.19
+ PCKh@0.7: 0.992
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/udp/hrnetv2_w18_rhd2d_256x256_udp-63ba6007_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.md b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..877247fe86ff2ec59a296f5cb45d88b392533135
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.md
@@ -0,0 +1,40 @@
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_mobilenet_v2](/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.985 | 0.883 | 2.79 | [ckpt](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_rhd2d_256x256-85fa02db_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_rhd2d_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..202a636fbe70e59ff71b6f225273242162c400cc
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - MobilenetV2
+ Training Data: RHD
+ Name: td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.883
+ EPE: 2.79
+ PCK@0.2: 0.985
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/mobilenetv2/mobilenetv2_rhd2d_256x256-85fa02db_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.md b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..f103a0df40e4ec57223a752e2c833f42b6909ae8
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.md
@@ -0,0 +1,57 @@
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [pose_resnet50](/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_res50_8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.991 | 0.898 | 2.32 | [ckpt](https://download.openmmlab.com/mmpose/hand/resnet/res50_rhd2d_256x256-5dc7e4cc_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/resnet/res50_rhd2d_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.yml b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d09f8ba2685b86fb1326c0460b7eb6fc83dd95fa
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_res50_8xb64-210e_rhd2d-256x256.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture:
+ - SimpleBaseline2D
+ - ResNet
+ Training Data: RHD
+ Name: td-hm_res50_8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.898
+ EPE: 2.32
+ PCK@0.2: 0.991
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/resnet/res50_rhd2d_256x256-5dc7e4cc_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..4a9bcc9b896ae499e034605209f1c7eb14ba7b39
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..44b8dc0f5a1c55d10293c40e5b8314fca6aa9b9c
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_dark-8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,162 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(256, 256),
+ heatmap_size=(64, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..d1c796234dd22760f6f52dcb97d05ad0410ceabb
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_hrnetv2-w18_udp-8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,158 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(18, 36)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(18, 36, 72)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(18, 36, 72, 144),
+ multiscale_output=True),
+ upsample=dict(mode='bilinear', align_corners=False)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://msra/hrnetv2_w18',
+ )),
+ neck=dict(
+ type='FeatureMapProcessor',
+ concat=True,
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=270,
+ out_channels=21,
+ deconv_out_channels=None,
+ conv_out_channels=(270, ),
+ conv_kernel_sizes=(1, ),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..d7176bacd73cad44295c84ae8f4b9b1d1201bf35
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_mobilenetv2_8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,125 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='MobileNetV2',
+ widen_factor=1.,
+ out_indices=(7, ),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='mmcls://mobilenet_v2',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1280,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_res50_8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_res50_8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..da5556802891a6d742527e7889d0f31161223eef
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_heatmap/rhd2d/td-hm_res50_8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,124 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(256, 256), heatmap_size=(64, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='torchvision://resnet50',
+ )),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=21,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_regression/README.md b/configs/hand_2d_keypoint/topdown_regression/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..0210a89c2de35fc5f0a480662aa216e61ac9c623
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/README.md
@@ -0,0 +1,25 @@
+# Top-down regression-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. At the 2nd stage, regression based methods directly regress the keypoint coordinates given the features extracted from the bounding box area, following the paradigm introduced in [Deeppose: Human pose estimation via deep neural networks](http://openaccess.thecvf.com/content_cvpr_2014/html/Toshev_DeepPose_Human_Pose_2014_CVPR_paper.html).
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+## Results and Models
+
+### OneHand10K Dataset
+
+Results on OneHand10K val set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :-------: | :--------: | :-----: | :---: | :---: | :-------------------------------------------------------: |
+| ResNet-50 | 256x256 | 0.990 | 0.485 | 34.21 | [resnet_onehand10k.md](./onehand10k/resnet_onehand10k.md) |
+
+### RHD Dataset
+
+Results on RHD test set
+
+| Model | Input Size | PCK@0.2 | AUC | EPE | Details and Download |
+| :-------: | :--------: | :-----: | :---: | :--: | :----------------------------------------: |
+| ResNet-50 | 256x256 | 0.988 | 0.865 | 3.32 | [resnet_rhd2d.md](./rhd2d/resnet_rhd2d.md) |
diff --git a/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.md b/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..40c0c184959466df639518450dcf17aa0b60ba30
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.md
@@ -0,0 +1,59 @@
+
+
+
+
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on OneHand10K val set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :---: | :--------------------------------------------------------: | :-------------------------------------------------------: |
+| [deeppose_resnet_50](/configs/hand_2d_keypoint/topdown_regression/onehand10k/td-reg_res50_8xb64-210e_onehand10k-256x256.py) | 256x256 | 0.990 | 0.485 | 34.21 | [ckpt](https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_onehand10k_256x256-cbddf43a_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_onehand10k_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.yml b/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d5e9d8122ecb0c2082b2d0b38413dee2dc2220aa
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_regression/onehand10k/td-reg_res50_8xb64-210e_onehand10k-256x256.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture:
+ - DeepPose
+ - ResNet
+ Training Data: OneHand10K
+ Name: td-reg_res50_8xb64-210e_onehand10k-256x256
+ Results:
+ - Dataset: OneHand10K
+ Metrics:
+ AUC: 0.485
+ EPE: 34.21
+ PCK@0.2: 0.99
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_onehand10k_256x256-cbddf43a_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_regression/onehand10k/td-reg_res50_8xb64-210e_onehand10k-256x256.py b/configs/hand_2d_keypoint/topdown_regression/onehand10k/td-reg_res50_8xb64-210e_onehand10k-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ee1556d45e18e3253f421948d1affd4eabfe673f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/onehand10k/td-reg_res50_8xb64-210e_onehand10k-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=21,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'OneHand10KDataset'
+data_mode = 'topdown'
+data_root = 'data/onehand10k/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/onehand10k_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.md b/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..6cca5580ba7fcb0fa0f089159b0c96007c5ce90f
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.md
@@ -0,0 +1,57 @@
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on RHD test set
+
+| Arch | Input Size | PCK@0.2 | AUC | EPE | ckpt | log |
+| :--------------------------------------------------------- | :--------: | :-----: | :---: | :--: | :--------------------------------------------------------: | :--------------------------------------------------------: |
+| [deeppose_resnet_50](/configs/hand_2d_keypoint/topdown_regression/rhd2d/td-reg_res50_8xb64-210e_rhd2d-256x256.py) | 256x256 | 0.988 | 0.865 | 3.32 | [ckpt](https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_rhd2d_256x256-37f1c4d3_20210330.pth) | [log](https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_rhd2d_256x256_20210330.log.json) |
diff --git a/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.yml b/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3d0a920c5daa2eb1eaab3bea7c5c77529d72f377
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.yml
@@ -0,0 +1,17 @@
+Models:
+- Config: configs/hand_2d_keypoint/topdown_regression/rhd2d/td-reg_res50_8xb64-210e_rhd2d-256x256.py
+ In Collection: DeepPose
+ Metadata:
+ Architecture:
+ - DeepPose
+ - ResNet
+ Training Data: RHD
+ Name: td-reg_res50_8xb64-210e_rhd2d-256x256
+ Results:
+ - Dataset: RHD
+ Metrics:
+ AUC: 0.865
+ EPE: 3.32
+ PCK@0.2: 0.988
+ Task: Hand 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand/deeppose/deeppose_res50_rhd2d_256x256-37f1c4d3_20210330.pth
diff --git a/configs/hand_2d_keypoint/topdown_regression/rhd2d/td-reg_res50_8xb64-210e_rhd2d-256x256.py b/configs/hand_2d_keypoint/topdown_regression/rhd2d/td-reg_res50_8xb64-210e_rhd2d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..a350c24bfe2d3d7246ed63c78f737414ee5f247e
--- /dev/null
+++ b/configs/hand_2d_keypoint/topdown_regression/rhd2d/td-reg_res50_8xb64-210e_rhd2d-256x256.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(checkpoint=dict(save_best='AUC', rule='greater'))
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(256, 256))
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RegressionHead',
+ in_channels=2048,
+ num_joints=21,
+ loss=dict(type='SmoothL1Loss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'Rhd2DDataset'
+data_mode = 'topdown'
+data_root = 'data/rhd/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(
+ type='RandomBBoxTransform', rotate_factor=180,
+ scale_factor=(0.7, 1.3)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/rhd_test.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# evaluators
+val_evaluator = [
+ dict(type='PCKAccuracy', thr=0.2),
+ dict(type='AUC'),
+ dict(type='EPE'),
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_3d_keypoint/README.md b/configs/hand_3d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..330319f42b186afec3a7c73afd627505e91c7dc8
--- /dev/null
+++ b/configs/hand_3d_keypoint/README.md
@@ -0,0 +1,7 @@
+# 3D Hand Pose Estimation
+
+3D hand pose estimation is defined as the task of detecting the poses (or keypoints) of the hand from an input image.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/3d_hand_keypoint.md) to prepare data.
diff --git a/configs/hand_3d_keypoint/internet/README.md b/configs/hand_3d_keypoint/internet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..8d913e07674c8c27b6b1b269af3bc50b1f9093b1
--- /dev/null
+++ b/configs/hand_3d_keypoint/internet/README.md
@@ -0,0 +1,10 @@
+# InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image
+
+## Results and Models
+
+### InterHand2.6m 3D Dataset
+
+| Arch | Set | MPJPE-single | MPJPE-interacting | MPJPE-all | MRRPE | APh | ckpt | log | Details and Download |
+| :------------------------------- | :-------: | :----------: | :---------------: | :-------: | :---: | :--: | :------------------------------: | :-----------------------------: | :-----------------------------------------------: |
+| [InterNet_resnet_50](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | test(H+M) | 9.47 | 13.40 | 11.59 | 29.28 | 0.99 | [ckpt](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth) | [log](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256_20210702.log.json) | [internet_interhand3d.md](./interhand3d/internet_interhand3d.md) |
+| [InterNet_resnet_50](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | val(M) | 11.22 | 15.23 | 13.16 | 31.73 | 0.98 | [ckpt](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth) | [log](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256_20210702.log.json) | [internet_interhand3d.md](./interhand3d/internet_interhand3d.md) |
diff --git a/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.md b/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.md
new file mode 100644
index 0000000000000000000000000000000000000000..eb775d743913aa13b0c5c5f75ab5a090191f280c
--- /dev/null
+++ b/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.md
@@ -0,0 +1,59 @@
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+
+InterNet (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+
+
+Results on InterHand2.6M val & test set
+
+| Train Set | Set | Arch | Input Size | MPJPE-single | MPJPE-interacting | MPJPE-all | MRRPE | APh | ckpt | log |
+| :-------- | :-------- | :----------------------------------------: | :--------: | :----------: | :---------------: | :-------: | :---: | :--: | :----------------------------------------: | :---------------------------------------: |
+| All | test(H+M) | [InterNet_resnet_50](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | 256x256 | 9.69 | 13.72 | 11.86 | 29.27 | 0.99 | [ckpt](https://download.openmmlab.com/mmpose/v1/hand_3d_keypoint/internet/interhand3d/internet_res50_interhand3d-d6ff20d6_20230913.pth) | [log](https://download.openmmlab.com/mmpose/v1/hand_3d_keypoint/internet/interhand3d/internet_res50_interhand3d-d6ff20d6_20230913.json) |
+| All | val(M) | [InterNet_resnet_50](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | 256x256 | 11.30 | 15.57 | 13.36 | 32.15 | 0.98 | [ckpt](https://download.openmmlab.com/mmpose/v1/hand_3d_keypoint/internet/interhand3d/internet_res50_interhand3d-d6ff20d6_20230913.pth) | [log](https://download.openmmlab.com/mmpose/v1/hand_3d_keypoint/internet/interhand3d/internet_res50_interhand3d-d6ff20d6_20230913.json) |
+| All | test(H+M) | [InterNet_resnet_50\*](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | 256x256 | 9.47 | 13.40 | 11.59 | 29.28 | 0.99 | [ckpt](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth) | [log](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256_20210702.log.json) |
+| All | val(M) | [InterNet_resnet_50\*](/configs/hand/3d_kpt_sview_rgb_img/internet/interhand3d/res50_interhand3d_all_256x256.py) | 256x256 | 11.22 | 15.23 | 13.16 | 31.73 | 0.98 | [ckpt](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth) | [log](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256_20210702.log.json) |
+
+*Models with * are trained in [MMPose 0.x](https://github.com/open-mmlab/mmpose/tree/0.x). The checkpoints and logs are only for validation.*
diff --git a/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.yml b/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.yml
new file mode 100644
index 0000000000000000000000000000000000000000..778e436272b71f90edd1655e67a0106bd7dee2da
--- /dev/null
+++ b/configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.yml
@@ -0,0 +1,35 @@
+Collections:
+- Name: InterNet
+ Paper:
+ Title: 'InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation
+ from a Single RGB Image'
+ URL: https://link.springer.com/content/pdf/10.1007/978-3-030-58565-5_33.pdf
+ README: https://github.com/open-mmlab/mmpose/blob/master/docs/en/papers/algorithms/internet.md
+Models:
+- Config: configs/hand_3d_keypoint/internet/interhand3d/internet_res50_4xb16-20e_interhand3d-256x256.py
+ In Collection: InterNet
+ Alias: hand3d
+ Metadata:
+ Architecture: &id001
+ - InterNet
+ - ResNet
+ Training Data: InterHand2.6M
+ Name: internet_res50_4xb16-20e_interhand3d-256x256
+ Results:
+ - Dataset: InterHand2.6M (H+M)
+ Metrics:
+ APh: 0.99
+ MPJPE-all: 11.86
+ MPJPE-interacting: 13.72
+ MPJPE-single: 9.69
+ MRRPE: 29.27
+ Task: Hand 3D Keypoint
+ - Dataset: InterHand2.6M (M)
+ Metrics:
+ APh: 0.98
+ MPJPE-all: 13.36
+ MPJPE-interacting: 15.57
+ MPJPE-single: 11.30
+ MRRPE: 32.15
+ Task: Hand 3D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth
diff --git a/configs/hand_3d_keypoint/internet/interhand3d/internet_res50_4xb16-20e_interhand3d-256x256.py b/configs/hand_3d_keypoint/internet/interhand3d/internet_res50_4xb16-20e_interhand3d-256x256.py
new file mode 100644
index 0000000000000000000000000000000000000000..ffe9f0f051cce39c54cecf22a1b0f38983d84ce6
--- /dev/null
+++ b/configs/hand_3d_keypoint/internet/interhand3d/internet_res50_4xb16-20e_interhand3d-256x256.py
@@ -0,0 +1,182 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# visualization
+vis_backends = [
+ dict(type='LocalVisBackend'),
+]
+visualizer = dict(
+ type='Pose3dLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime
+train_cfg = dict(max_epochs=20, val_interval=1)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(type='Adam', lr=0.0002))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=20,
+ milestones=[15, 17],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+auto_scale_lr = dict(base_batch_size=128)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ interval=1,
+ save_best='MPJPE_all',
+ rule='less',
+ max_keep_ckpts=1),
+ logger=dict(type='LoggerHook', interval=20),
+)
+
+# codec settings
+codec = dict(
+ type='Hand3DHeatmap',
+ image_size=[256, 256],
+ root_heatmap_size=64,
+ heatmap_size=[64, 64, 64],
+ sigma=2.5,
+ max_bound=255,
+ depth_size=64)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ head=dict(
+ type='InternetHead',
+ keypoint_head_cfg=dict(
+ in_channels=2048,
+ out_channels=21 * 64,
+ depth_size=codec['depth_size'],
+ deconv_out_channels=(256, 256, 256),
+ deconv_kernel_sizes=(4, 4, 4),
+ ),
+ root_head_cfg=dict(
+ in_channels=2048,
+ heatmap_size=codec['root_heatmap_size'],
+ hidden_dims=(512, ),
+ ),
+ hand_type_head_cfg=dict(
+ in_channels=2048,
+ num_labels=2,
+ hidden_dims=(512, ),
+ ),
+ decoder=codec),
+ test_cfg=dict(flip_test=False))
+
+# base dataset settings
+dataset_type = 'InterHand3DDataset'
+data_mode = 'topdown'
+data_root = 'data/interhand2.6m/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='HandRandomFlip', prob=0.5),
+ dict(type='RandomBBoxTransform', rotate_factor=90.0),
+ dict(type='TopdownAffine', input_size=codec['image_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'rotation', 'img_shape',
+ 'focal', 'principal_pt', 'input_size', 'input_center',
+ 'input_scale', 'hand_type', 'hand_type_valid', 'flip',
+ 'flip_indices', 'abs_depth'))
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['image_size']),
+ dict(
+ type='PackPoseInputs',
+ meta_keys=('id', 'img_id', 'img_path', 'rotation', 'img_shape',
+ 'focal', 'principal_pt', 'input_size', 'input_center',
+ 'input_scale', 'hand_type', 'hand_type_valid', 'flip',
+ 'flip_indices', 'abs_depth'))
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=16,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/all/InterHand2.6M_train_data.json',
+ camera_param_file='annotations/all/InterHand2.6M_train_camera.json',
+ joint_file='annotations/all/InterHand2.6M_train_joint_3d.json',
+ use_gt_root_depth=True,
+ rootnet_result_file=None,
+ data_mode=data_mode,
+ data_root=data_root,
+ data_prefix=dict(img='images/train/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=16,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/machine_annot/InterHand2.6M_val_data.json',
+ camera_param_file='annotations/machine_annot/'
+ 'InterHand2.6M_val_camera.json',
+ joint_file='annotations/machine_annot/InterHand2.6M_val_joint_3d.json',
+ use_gt_root_depth=True,
+ rootnet_result_file=None,
+ data_mode=data_mode,
+ data_root=data_root,
+ data_prefix=dict(img='images/val/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+test_dataloader = dict(
+ batch_size=16,
+ num_workers=1,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/all/'
+ 'InterHand2.6M_test_data.json',
+ camera_param_file='annotations/all/'
+ 'InterHand2.6M_test_camera.json',
+ joint_file='annotations/all/'
+ 'InterHand2.6M_test_joint_3d.json',
+ use_gt_root_depth=True,
+ rootnet_result_file=None,
+ data_mode=data_mode,
+ data_root=data_root,
+ data_prefix=dict(img='images/test/'),
+ pipeline=val_pipeline,
+ test_mode=True,
+ ))
+
+# evaluators
+val_evaluator = [
+ dict(type='InterHandMetric', modes=['MPJPE', 'MRRPE', 'HandednessAcc'])
+]
+test_evaluator = val_evaluator
diff --git a/configs/hand_gesture/README.md b/configs/hand_gesture/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..7cc5bb323b05823b8eeedfb905756ce84c87c8ac
--- /dev/null
+++ b/configs/hand_gesture/README.md
@@ -0,0 +1,13 @@
+# Gesture Recognition
+
+Gesture recognition aims to recognize the hand gestures in the video, such as thumbs up.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_hand_gesture.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/gesture_recognition_demo.md) to run the demo.
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + + diff --git a/configs/wholebody_2d_keypoint/README.md b/configs/wholebody_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..362a6a89764acec6db1a4ef8216352c1fbbe697e
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/README.md
@@ -0,0 +1,19 @@
+# 2D Human Whole-Body Pose Estimation
+
+2D human whole-body pose estimation aims to localize dense landmarks on the entire human body including face, hands, body, and feet.
+
+Existing approaches can be categorized into top-down and bottom-up approaches.
+
+Top-down methods divide the task into two stages: human detection and whole-body pose estimation. They perform human detection first, followed by single-person whole-body pose estimation given human bounding boxes.
+
+Bottom-up approaches (e.g. AE) first detect all the whole-body keypoints and then group/associate them into person instances.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_wholebody_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/2d_wholebody_pose_demo.md) to run demos.
+
+
diff --git a/configs/wholebody_2d_keypoint/README.md b/configs/wholebody_2d_keypoint/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..362a6a89764acec6db1a4ef8216352c1fbbe697e
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/README.md
@@ -0,0 +1,19 @@
+# 2D Human Whole-Body Pose Estimation
+
+2D human whole-body pose estimation aims to localize dense landmarks on the entire human body including face, hands, body, and feet.
+
+Existing approaches can be categorized into top-down and bottom-up approaches.
+
+Top-down methods divide the task into two stages: human detection and whole-body pose estimation. They perform human detection first, followed by single-person whole-body pose estimation given human bounding boxes.
+
+Bottom-up approaches (e.g. AE) first detect all the whole-body keypoints and then group/associate them into person instances.
+
+## Data preparation
+
+Please follow [DATA Preparation](/docs/en/dataset_zoo/2d_wholebody_keypoint.md) to prepare data.
+
+## Demo
+
+Please follow [Demo](/demo/docs/en/2d_wholebody_pose_demo.md) to run demos.
+
+
diff --git a/configs/wholebody_2d_keypoint/dwpose/README.md b/configs/wholebody_2d_keypoint/dwpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..d85cb48c5388a56df14209aa007703ff819136e1 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/README.md @@ -0,0 +1,63 @@ +# DWPose + +Whole-body pose estimation localizes the human body, hand, face, and foot keypoints in an image. This task is challenging due to multi-scale body parts, fine-grained localization for low-resolution regions, and data scarcity. Meanwhile, applying a highly efficient and accurate pose estimator to widely human-centric understanding and generation tasks is urgent. In this work, we present a two-stage pose **D**istillation for **W**hole-body **P**ose estimators, named **DWPose**, to improve their effectiveness and efficiency. The first-stage distillation designs a weight-decay strategy while utilizing a teacher's intermediate feature and final logits with both visible and invisible keypoints to supervise the student from scratch. The second stage distills the student model itself to further improve performance. Different from the previous self-knowledge distillation, this stage finetunes the student's head with only 20% training time as a plug-and-play training strategy. For data limitations, we explore the UBody dataset that contains diverse facial expressions and hand gestures for real-life applications. Comprehensive experiments show the superiority of our proposed simple yet effective methods. We achieve new state-of-the-art performance on COCO-WholeBody, significantly boosting the whole-body AP of RTMPose-l from 64.8% to 66.5%, even surpassing RTMPose-x teacher with 65.3% AP. We release a series of models with different sizes, from tiny to large, for satisfying various downstream tasks. + +## Results and Models + +### COCO-WholeBody Dataset + +Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset + +- DWPose Models are supported by [DWPose](https://github.com/IDEA-Research/DWPose) +- Models are trained and distilled on the following datasets: + - [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) + - [UBody](https://github.com/IDEA-Research/OSX) + +| Config | S1 Dis_config | S2 Dis_config | Input Size | Whole AP | Whole AR | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------- | :-----------------: | :-----------------: | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------: | +| [DWPose-t](../rtmpose/ubody/rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py) | [DW l-t](../dwpose/ubody/s1_dis/dwpose_l_dis_t_coco-ubody-256x192.py) | [DW t-t](../dwpose/ubody/s2_dis/dwpose_t-tt_coco-ubody-256x192.py) | 256x192 | 48.5 | 58.4 | 0.5 | - | - | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth) | +| [DWPose-s](../rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py) | [DW l-s](../dwpose/ubody/s1_dis/dwpose_l_dis_s_coco-ubody-256x192.py) | [DW s-s](../dwpose/ubody/s2_dis/dwpose_s-ss_coco-ubody-256x192.py) | 256x192 | 53.8 | 63.2 | 0.9 | - | - | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.pth) | +| [DWPose-m](../rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py) | [DW l-m](../dwpose/ubody/s1_dis/dwpose_l_dis_m_coco-ubody-256x192.py) | [DW m-m](../dwpose/ubody/s2_dis/dwpose_m-mm_coco-ubody-256x192.py) | 256x192 | 60.6 | 69.5 | 2.22 | 13.50 | 4.00 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth) | +| [DWPose-l](../rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py) | [DW x-l](../dwpose/ubody/s1_dis/dwpose_x_dis_l_coco-ubody-256x192.py) | [DW l-l](../dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-256x192.py) | 256x192 | 63.1 | 71.7 | 4.52 | 23.41 | 5.67 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth) | +| [DWPose-l](../rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py) | [DW x-l](../dwpose/ubody/s1_dis/dwpose_x_dis_l_coco-ubody-384x288.py) | [DW l-l](../dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-384x288.py) | 384x288 | 66.5 | 74.3 | 10.07 | 44.58 | 7.68 | [Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.pth) | + +## Train a model + +### Train DWPose with the first stage distillation + +``` +bash tools/dist_train.sh configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/rtmpose_x_dis_l_coco-ubody-384x288.py 8 +``` + +### Tansfer the S1 distillation models into regular models + +``` +# first stage distillation +python pth_transfer.py $dis_ckpt $new_pose_ckpt +``` + +⭐Before S2 distillation, you should add your model path into 'teacher_pretrained' of your S2 dis_config. + +### Train DWPose with the second stage distillation + +``` +bash tools/dist_train.sh configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-384x288.py 8 +``` + +### Tansfer the S2 distillation models into regular models + +``` +# second stage distillation +python pth_transfer.py $dis_ckpt $new_pose_ckpt --two_dis +``` + +## Citation + +``` +@article{yang2023effective, + title={Effective Whole-body Pose Estimation with Two-stages Distillation}, + author={Yang, Zhendong and Zeng, Ailing and Yuan, Chun and Li, Yu}, + journal={arXiv preprint arXiv:2307.15880}, + year={2023} +} +``` diff --git a/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_l_dis_m_coco-256x192.py b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_l_dis_m_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..422871acbb08f9ecbb67144c3a76166151b37387 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_l_dis_m_coco-256x192.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmpose/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-l_8xb64-270e_coco-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-m_8xb64-270e_coco-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=768, + teacher_channels=1024, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_x_dis_l_coco-384x288.py b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_x_dis_l_coco-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..150cb2bbe62ba7117b79ecbd3cceec3f6a8f64bf --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s1_dis/dwpose_x_dis_l_coco-384x288.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-x_simcc-coco-wholebody_pt-body7_270e-384x288-401dfc90_20230629.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-x_8xb32-270e_coco-wholebody-384x288.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-l_8xb32-270e_coco-wholebody-384x288.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=1024, + teacher_channels=1280, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_l-ll_coco-384x288.py b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_l-ll_coco-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..6c63f99b0cee942b7667ac193d1b46e8c8b00196 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_l-ll_coco-384x288.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_x_dis_l_coco-384x288/dw-x-l_coco_384.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-l_8xb32-270e_coco-wholebody-384x288.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-l_8xb32-270e_coco-wholebody-384x288.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_m-mm_coco-256x192.py b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_m-mm_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..943ec60184aa6b2b264eabc219385c93080a04bc --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/coco-wholebody/s2_dis/dwpose_m-mm_coco-256x192.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_l_dis_m_coco-256x192/dw-l-m_coco_256.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-m_8xb64-270e_coco-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/' + 'rtmpose-m_8xb64-270e_coco-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_m_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_m_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..b3a917b96e855b869844b45f3cc02910ce6b1d52 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_m_coco-ubody-256x192.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_ucoco_256x192-95bb32f5_20230822.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=768, + teacher_channels=1024, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_s_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_s_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..c90a0ea6a7693928565840b250063663e54cf3bb --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_s_coco-ubody-256x192.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_ucoco_256x192-95bb32f5_20230822.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=512, + teacher_channels=1024, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_t_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_t_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..01618f146a0a150a7fea67e4c0313087ae688312 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_l_dis_t_coco-ubody-256x192.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_ucoco_256x192-95bb32f5_20230822.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=384, + teacher_channels=1024, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_x_dis_l_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_x_dis_l_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..85a287324b647c6b19dde1486093b68940df72ff --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/dwpose_x_dis_l_coco-ubody-256x192.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-x_ucoco_256x192-05f5bcb7_20230822.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-x_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=1024, + teacher_channels=1280, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/rtmpose_x_dis_l_coco-ubody-384x288.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/rtmpose_x_dis_l_coco-ubody-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..acde64a03a6b1f09689766eae75548c09f9b26a7 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s1_dis/rtmpose_x_dis_l_coco-ubody-384x288.py @@ -0,0 +1,48 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py' # noqa: E501 +] + +# model settings +find_unused_parameters = False + +# config settings +fea = True +logit = True + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + teacher_pretrained='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-x_ucoco_384x288-f5b50679_20230822.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-x_8xb32-270e_coco-ubody-wholebody-384x288.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='FeaLoss', + name='loss_fea', + use_this=fea, + student_channels=1024, + teacher_channels=1280, + alpha_fea=0.00007, + ) + ]), + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=0.1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), +) +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..e3f456a2b9d76d430ae0d894b62c8de6436b6827 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-256x192.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_x_dis_l_coco-ubody-256x192/dw-x-l_ucoco_256.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-384x288.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..3815fad1e2558c7f44b63ad2170021007287e6cb --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_l-ll_coco-ubody-384x288.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_x_dis_l_coco-ubody-384x288/dw-x-l_ucoco_384.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_m-mm_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_m-mm_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..1e6834ffca3593604ad2b550ad7c0c8e5481553d --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_m-mm_coco-ubody-256x192.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_l_dis_m_coco-ubody-256x192/dw-l-m_ucoco_256.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_s-ss_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_s-ss_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..24a4a94642af4e6858c369787fd22b7d530cba51 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_s-ss_coco-ubody-256x192.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_l_dis_s_coco-ubody-256x192/dw-l-s_ucoco_256.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_t-tt_coco-ubody-256x192.py b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_t-tt_coco-ubody-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..c7c322ece2662b943d399afb0854fa6766478e24 --- /dev/null +++ b/configs/wholebody_2d_keypoint/dwpose/ubody/s2_dis/dwpose_t-tt_coco-ubody-256x192.py @@ -0,0 +1,45 @@ +_base_ = [ + '../../../rtmpose/ubody/rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py' # noqa: E501 +] + +# model settings +find_unused_parameters = True + +# dis settings +second_dis = True + +# config settings +logit = True + +train_cfg = dict(max_epochs=60, val_interval=10) + +# method details +model = dict( + _delete_=True, + type='DWPoseDistiller', + two_dis=second_dis, + teacher_pretrained='work_dirs/' + 'dwpose_l_dis_t_coco-ubody-256x192/dw-l-t_ucoco_256.pth', # noqa: E501 + teacher_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + student_cfg='configs/wholebody_2d_keypoint/rtmpose/ubody/' + 'rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py', # noqa: E501 + distill_cfg=[ + dict(methods=[ + dict( + type='KDLoss', + name='loss_logit', + use_this=logit, + weight=1, + ) + ]), + ], + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + train_cfg=train_cfg, +) + +optim_wrapper = dict(clip_grad=dict(max_norm=1., norm_type=2)) diff --git a/configs/wholebody_2d_keypoint/rtmpose/README.md b/configs/wholebody_2d_keypoint/rtmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..ac40c016aa67b65eff87aa87f92cdc10be66e452 --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/README.md @@ -0,0 +1,18 @@ +# RTMPose + +Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency. +In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose. +Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves **67.0% AP** on COCO-WholeBody with **130+ FPS**, outperforming existing open-source libraries. +To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device. + +## Results and Models + +### COCO-WholeBody Dataset + +Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset + +| Model | Input Size | Whole AP | Whole AR | Details and Download | +| :-------: | :--------: | :------: | :------: | :---------------------------------------------------------------------: | +| RTMPose-m | 256x192 | 0.582 | 0.674 | [rtmpose_coco-wholebody.md](./coco-wholebody/rtmpose_coco-wholebody.md) | +| RTMPose-l | 256x192 | 0.611 | 0.700 | [rtmpose_coco-wholebody.md](./coco-wholebody/rtmpose_coco-wholebody.md) | +| RTMPose-l | 384x288 | 0.648 | 0.730 | [rtmpose_coco-wholebody.md](./coco-wholebody/rtmpose_coco-wholebody.md) | diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb1024-270e_cocktail14-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb1024-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..59351d5f4a1920834a1217b7279b70512f151a00 --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb1024-270e_cocktail14-256x192.py @@ -0,0 +1,615 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 1024 +val_batch_size = 32 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=8192) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth' # noqa + )), + neck=dict( + type='CSPNeXtPAFPN', + in_channels=[256, 512, 1024], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU', inplace=True)), + head=dict( + type='RTMWHead', + in_channels=1024, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoWholeBodyDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type='CrowdPoseDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type='MpiiDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type='JhmdbDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type='HalpeDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type='PoseTrack18Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type='HumanArt21Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type='UBody2dDataset', + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale', padding=1.25), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type='WFLWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type='Face300WDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type='COFWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type='LapaDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type='InterHand2DDoubleDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type='CocoWholeBodyDataset', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoWholeBodyMetric', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb320-270e_cocktail14-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb320-270e_cocktail14-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..a687f89ef62fa5b673c273d6702617619d7a3482 --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb320-270e_cocktail14-384x288.py @@ -0,0 +1,617 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# common setting +num_keypoints = 133 +input_size = (288, 384) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 320 +val_batch_size = 32 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 150 to 300 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=2560) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=input_size, + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False, + decode_visibility=True) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth' # noqa + )), + neck=dict( + type='CSPNeXtPAFPN', + in_channels=[256, 512, 1024], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU', inplace=True)), + head=dict( + type='RTMWHead', + in_channels=1024, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoWholeBodyDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type='CrowdPoseDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type='MpiiDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type='JhmdbDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type='HalpeDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type='PoseTrack18Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type='HumanArt21Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type='UBody2dDataset', + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale', padding=1.25), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type='WFLWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type='Face300WDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type='COFWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type='LapaDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type='InterHand2DDoubleDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type='CocoWholeBodyDataset', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoWholeBodyMetric', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-m_8xb1024-270e_cocktail14-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-m_8xb1024-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..fc9d90e5cd61a313c940ec9846a3d784f417dc69 --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-m_8xb1024-270e_cocktail14-256x192.py @@ -0,0 +1,615 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 1024 +val_batch_size = 32 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=8192) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth' # noqa + )), + neck=dict( + type='CSPNeXtPAFPN', + in_channels=[192, 384, 768], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU', inplace=True)), + head=dict( + type='RTMWHead', + in_channels=768, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoWholeBodyDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type='CrowdPoseDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type='MpiiDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type='JhmdbDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type='HalpeDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type='PoseTrack18Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type='HumanArt21Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type='UBody2dDataset', + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale', padding=1.25), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type='WFLWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type='Face300WDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type='COFWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type='LapaDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type='InterHand2DDoubleDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type='CocoWholeBodyDataset', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoWholeBodyMetric', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb320-270e_cocktail14-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb320-270e_cocktail14-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..115dc9408b7cda685a387fb058f37298e67f28fe --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb320-270e_cocktail14-384x288.py @@ -0,0 +1,617 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# common setting +num_keypoints = 133 +input_size = (288, 384) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 320 +val_batch_size = 32 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + # use cosine lr from 150 to 300 epoch + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=2560) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=input_size, + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False, + decode_visibility=True) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1.33, + widen_factor=1.25, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/' + 'wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_simcc-ucoco_pt-aic-coco_270e-384x288-f5b50679_20230822.pth' # noqa + )), + neck=dict( + type='CSPNeXtPAFPN', + in_channels=[320, 640, 1280], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU', inplace=True)), + head=dict( + type='RTMWHead', + in_channels=1280, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoWholeBodyDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type='CrowdPoseDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type='MpiiDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type='JhmdbDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type='HalpeDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type='PoseTrack18Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type='HumanArt21Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type='UBody2dDataset', + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale', padding=1.25), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type='WFLWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type='Face300WDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type='COFWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type='LapaDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type='InterHand2DDoubleDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type='CocoWholeBodyDataset', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoWholeBodyMetric', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb704-270e_cocktail14-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb704-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..750ad46d3d1c6982837fa75ca3083245a492a9bd --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb704-270e_cocktail14-256x192.py @@ -0,0 +1,615 @@ +_base_ = ['../../../_base_/default_runtime.py'] + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 704 +val_batch_size = 32 + +train_cfg = dict(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type='LinearLR', + start_factor=1.0e-5, + by_epoch=False, + begin=0, + end=1000), + dict( + type='CosineAnnealingLR', + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=5632) + +# codec settings +codec = dict( + type='SimCCLabel', + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type='TopdownPoseEstimator', + data_preprocessor=dict( + type='PoseDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type='CSPNeXt', + arch='P5', + expand_ratio=0.5, + deepen_factor=1.33, + widen_factor=1.25, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type='SiLU'), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/' + 'wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_simcc-ucoco_pt-aic-coco_270e-256x192-05f5bcb7_20230822.pth' # noqa + )), + neck=dict( + type='CSPNeXtPAFPN', + in_channels=[320, 640, 1280], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type='SyncBN'), + act_cfg=dict(type='SiLU', inplace=True)), + head=dict( + type='RTMWHead', + in_channels=1280, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type='KLDiscretLoss', + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = 'CocoWholeBodyDataset' +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PhotometricDistortion'), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + dict( + type='CoarseDropout', + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] +val_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') +] +train_pipeline_stage2 = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict( + type='Albumentation', + transforms=[ + dict(type='Blur', p=0.1), + dict(type='MedianBlur', p=0.1), + ]), + dict( + type='GenerateTarget', + encoder=codec, + use_dataset_keypoint_weights=True), + dict(type='PackPoseInputs') +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type='AicDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type='CrowdPoseDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type='MpiiDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type='JhmdbDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type='HalpeDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type='PoseTrack18Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type='HumanArt21Dataset', + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type='UBody2dDataset', + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale', padding=1.25), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type='WFLWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type='Face300WDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type='COFWDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type='LapaDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type='LoadImage', backend_args=backend_args), + dict(type='GetBBoxCenterScale'), + dict( + type='RandomBBoxTransform', + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type='InterHand2DDoubleDataset', + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type='CocoWholeBodyDataset', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks = dict( + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type='EMAHook', + ema_type='ExpMomentumEMA', + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type='mmdet.PipelineSwitchHook', + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type='CocoWholeBodyMetric', + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.md b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.md new file mode 100644 index 0000000000000000000000000000000000000000..b53522226a1f345adbad0750624bf7046246f1d7 --- /dev/null +++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.md @@ -0,0 +1,80 @@ + + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+- `Cocktail14` denotes model trained on 14 public datasets:
+ - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic)
+ - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose)
+ - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii)
+ - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset)
+ - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe)
+ - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18)
+ - [COCO-Wholebody](https://github.com/jin-s13/COCO-WholeBody/)
+ - [UBody](https://github.com/IDEA-Research/OSX)
+ - [Human-Art](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#human-art-dataset)
+ - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html)
+ - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/)
+ - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/)
+ - [LaPa](https://github.com/JDAI-CV/lapa-dataset)
+ - [InterHand](https://mks0601.github.io/InterHand2.6M/)
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------------------------: | :-: |
+| [rtmw-m](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-m_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 0.676 | 0.747 | 0.671 | 0.794 | 0.783 | 0.854 | 0.491 | 0.604 | 0.582 | 0.673 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth) | - |
+| [rtmw-l](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 0.743 | 0.807 | 0.763 | 0.868 | 0.834 | 0.889 | 0.598 | 0.701 | 0.660 | 0.746 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth) | - |
+| [rtmw-x](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 0.746 | 0.808 | 0.770 | 0.869 | 0.844 | 0.896 | 0.610 | 0.710 | 0.672 | 0.752 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth) | - |
+| [rtmw-l](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb320-270e_cocktail14-384x288.py) | 384x288 | 0.761 | 0.824 | 0.793 | 0.885 | 0.884 | 0.921 | 0.663 | 0.752 | 0.701 | 0.780 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth) | - |
+| [rtmw-x](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 0.763 | 0.826 | 0.796 | 0.888 | 0.884 | 0.923 | 0.664 | 0.755 | 0.702 | 0.781 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth) | - |
diff --git a/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.yml b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.yml
new file mode 100644
index 0000000000000000000000000000000000000000..799a966dc87c732f2239db5148bb676a8bb0e692
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.yml
@@ -0,0 +1,108 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-m_8xb1024-270e_cocktail14-256x192.py
+ In Collection: RTMPose
+ Alias: wholebody
+ Metadata:
+ Architecture: &id001
+ - RTMPose
+ Training Data: COCO-WholeBody
+ Name: rtmw-m_8xb1024-270e_cocktail14-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.676
+ Body AR: 0.747
+ Face AP: 0.783
+ Face AR: 0.854
+ Foot AP: 0.671
+ Foot AR: 0.794
+ Hand AP: 0.491
+ Hand AR: 0.604
+ Whole AP: 0.582
+ Whole AR: 0.673
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb1024-270e_cocktail14-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmw-l_8xb1024-270e_cocktail14-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.743
+ Body AR: 0.807
+ Face AP: 0.834
+ Face AR: 0.889
+ Foot AP: 0.763
+ Foot AR: 0.868
+ Hand AP: 0.598
+ Hand AR: 0.701
+ Whole AP: 0.660
+ Whole AR: 0.746
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb704-270e_cocktail14-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmw-x_8xb704-270e_cocktail14-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.746
+ Body AR: 0.808
+ Face AP: 0.844
+ Face AR: 0.896
+ Foot AP: 0.770
+ Foot AR: 0.869
+ Hand AP: 0.610
+ Hand AR: 0.710
+ Whole AP: 0.672
+ Whole AR: 0.752
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-l_8xb320-270e_cocktail14-384x288.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmw-l_8xb320-270e_cocktail14-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.761
+ Body AR: 0.824
+ Face AP: 0.884
+ Face AR: 0.921
+ Foot AP: 0.793
+ Foot AR: 0.885
+ Hand AP: 0.663
+ Hand AR: 0.752
+ Whole AP: 0.701
+ Whole AR: 0.780
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw-x_8xb320-270e_cocktail14-384x288.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmw-x_8xb320-270e_cocktail14-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.763
+ Body AR: 0.826
+ Face AP: 0.884
+ Face AR: 0.923
+ Foot AP: 0.796
+ Foot AR: 0.888
+ Hand AP: 0.664
+ Hand AR: 0.755
+ Whole AP: 0.702
+ Whole AR: 0.781
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..39a6ff79d784df9518a1f457d129c6a89cfc97ca
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(288, 384),
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..9f32f25777af9d6bc8b668f61bfab76b29d9eea0
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..8c8c92d5f792a7516a603d326bb8e138bfe212b6
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py
@@ -0,0 +1,232 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..55b11c419ae49b9f8e8e9a579ff89057c6b0ba0f
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py
@@ -0,0 +1,233 @@
+_base_ = ['mmpose::_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 133
+input_size = (288, 384)
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 32
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.33,
+ widen_factor=1.25,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1280,
+ out_channels=num_keypoints,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.md b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..e43c0b3750028497554c8c283f676985c8d9f03b
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.md
@@ -0,0 +1,62 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+
+
+
+
+RTMDet (arXiv'2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [rtmpose-m](/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 0.673 | 0.750 | 0.615 | 0.752 | 0.813 | 0.871 | 0.475 | 0.589 | 0.582 | 0.674 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.json) |
+| [rtmpose-l](/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 0.695 | 0.769 | 0.658 | 0.785 | 0.833 | 0.887 | 0.519 | 0.628 | 0.611 | 0.700 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.json) |
+| [rtmpose-l](/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 0.712 | 0.781 | 0.693 | 0.811 | 0.882 | 0.919 | 0.579 | 0.677 | 0.648 | 0.730 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.json) |
diff --git a/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.yml b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0c1fa437f51a6297370e1535d2ddda8cd5e762d7
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.yml
@@ -0,0 +1,66 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py
+ In Collection: RTMPose
+ Alias: wholebody
+ Metadata:
+ Architecture: &id001
+ - RTMPose
+ Training Data: COCO-WholeBody
+ Name: rtmpose-m_8xb64-270e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.673
+ Body AR: 0.750
+ Face AP: 0.813
+ Face AR: 0.871
+ Foot AP: 0.615
+ Foot AR: 0.752
+ Hand AP: 0.475
+ Hand AR: 0.589
+ Whole AP: 0.582
+ Whole AR: 0.674
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmpose-l_8xb64-270e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.695
+ Body AR: 0.769
+ Face AP: 0.833
+ Face AR: 0.887
+ Foot AP: 0.658
+ Foot AR: 0.785
+ Hand AP: 0.519
+ Hand AR: 0.628
+ Whole AP: 0.611
+ Whole AR: 0.700
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth
+- Config: configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py
+ In Collection: RTMPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: rtmpose-l_8xb32-270e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.712
+ Body AR: 0.781
+ Face AP: 0.882
+ Face AR: 0.919
+ Foot AP: 0.693
+ Foot AR: 0.811
+ Hand AP: 0.579
+ Hand AR: 0.677
+ Whole AP: 0.648
+ Whole AR: 0.730
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..203766402c5189559095290f49b1c376d444a63e
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb32-270e_coco-ubody-wholebody-384x288.py
@@ -0,0 +1,256 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 32
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 150 to 300 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(288, 384),
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=(9, 12),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..66c42ad8a80a48ee4784bcffb769ebbb157545f3
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-l_8xb64-270e_coco-ubody-wholebody-256x192.py
@@ -0,0 +1,256 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 64
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 150 to 300 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1024,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..0856fbbe9bf361df1e28d9690d0ea05f5c70ebc8
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-m_8xb64-270e_coco-ubody-wholebody-256x192.py
@@ -0,0 +1,256 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 64
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 150 to 300 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=768,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..66562ee8671b2d79e0a20d9903dcb1aa41aad3e2
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-s_8xb64-270e_coco-ubody-wholebody-256x192.py
@@ -0,0 +1,256 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 64
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 150 to 300 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=512,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..beb10b16f315961e2ce7b8dd6506bd3717ea7023
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-t_8xb64-270e_coco-ubody-wholebody-256x192.py
@@ -0,0 +1,256 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 64
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ # use cosine lr from 150 to 300 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.167,
+ widen_factor=0.375,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=384,
+ out_channels=133,
+ input_size=codec['input_size'],
+ in_featuremap_size=(6, 8),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb32-270e_coco-ubody-wholebody-384x288.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb32-270e_coco-ubody-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..695f64089720ce87e765785d04815110930f00bd
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb32-270e_coco-ubody-wholebody-384x288.py
@@ -0,0 +1,260 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 133
+input_size = (288, 384)
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 32
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=input_size,
+ sigma=(6., 6.93),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.33,
+ widen_factor=1.25,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1280,
+ out_channels=num_keypoints,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb64-270e_coco-ubody-wholebody-256x192.py b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb64-270e_coco-ubody-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..30f1015394dffdbd8d0c313375e50c1fb472da07
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_8xb64-270e_coco-ubody-wholebody-256x192.py
@@ -0,0 +1,260 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# common setting
+num_keypoints = 133
+input_size = (192, 256)
+
+# runtime
+max_epochs = 270
+stage2_num_epochs = 30
+base_lr = 4e-3
+train_batch_size = 64
+val_batch_size = 32
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ clip_grad=dict(max_norm=35, norm_type=2),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='SimCCLabel',
+ input_size=(192, 256),
+ sigma=(4.9, 5.66),
+ simcc_split_ratio=2.0,
+ normalize=False,
+ use_dark=False)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.33,
+ widen_factor=1.25,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmpose/v1/projects/'
+ 'rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth' # noqa: E501
+ )),
+ head=dict(
+ type='RTMCCHead',
+ in_channels=1280,
+ out_channels=num_keypoints,
+ input_size=codec['input_size'],
+ in_featuremap_size=tuple([s // 32 for s in codec['input_size']]),
+ simcc_split_ratio=codec['simcc_split_ratio'],
+ final_layer_kernel_size=7,
+ gau_cfg=dict(
+ hidden_dims=256,
+ s=128,
+ expansion_factor=2,
+ dropout_rate=0.,
+ drop_path=0.,
+ act_fn='SiLU',
+ use_rel_bias=False,
+ pos_enc=False),
+ loss=dict(
+ type='KLDiscretLoss',
+ use_target_weight=True,
+ beta=10.,
+ label_softmax=True),
+ decoder=codec),
+ test_cfg=dict(flip_test=True, ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+backend_args = dict(backend='local')
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.5, 1.5], rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.5, 1.5],
+ rotate_factor=90),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=train_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+
+val_dataloader = dict(
+ batch_size=val_batch_size,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ data_prefix=dict(img='coco/val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/README.md b/configs/wholebody_2d_keypoint/topdown_heatmap/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..71837c998b09214497ca46b4a19c28e2ec4897fb
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/README.md
@@ -0,0 +1,35 @@
+# Top-down heatmap-based pose estimation
+
+Top-down methods divide the task into two stages: object detection, followed by single-object pose estimation given object bounding boxes. Instead of estimating keypoint coordinates directly, the pose estimator will produce heatmaps which represent the likelihood of being a keypoint, following the paradigm introduced in [Simple Baselines for Human Pose Estimation and Tracking](http://openaccess.thecvf.com/content_ECCV_2018/html/Bin_Xiao_Simple_Baselines_for_ECCV_2018_paper.html).
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+## Results and Models
+
+### COCO-WholeBody Dataset
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Model | Input Size | Whole AP | Whole AR | Details and Download |
+| :-----------------: | :--------: | :------: | :------: | :-----------------------------------------------------------------------------: |
+| HRNet-w48+Dark+ | 384x288 | 0.661 | 0.743 | [hrnet_dark_coco-wholebody.md](./coco-wholebody/hrnet_dark_coco-wholebody.md) |
+| HRNet-w32+Dark | 256x192 | 0.582 | 0.671 | [hrnet_dark_coco-wholebody.md](./coco-wholebody/hrnet_dark_coco-wholebody.md) |
+| HRNet-w48 | 256x192 | 0.579 | 0.681 | [hrnet_coco-wholebody.md](./coco-wholebody/hrnet_coco-wholebody.md) |
+| CSPNeXt-m | 256x192 | 0.567 | 0.641 | [cspnext_udp_coco-wholebody.md](./coco-wholebody/cspnext_udp_coco-wholebody.md) |
+| HRNet-w32 | 256x192 | 0.549 | 0.646 | [hrnet_ubody-coco-wholebody.md](./ubody2d/hrnet_ubody-coco-wholebody.md) |
+| ResNet-152 | 256x192 | 0.548 | 0.661 | [resnet_coco-wholebody.md](./coco-wholebody/resnet_coco-wholebody.md) |
+| HRNet-w32 | 256x192 | 0.536 | 0.636 | [hrnet_coco-wholebody.md](./coco-wholebody/hrnet_coco-wholebody.md) |
+| ResNet-101 | 256x192 | 0.531 | 0.645 | [resnet_coco-wholebody.md](./coco-wholebody/resnet_coco-wholebody.md) |
+| S-ViPNAS-Res50+Dark | 256x192 | 0.528 | 0.632 | [vipnas_dark_coco-wholebody.md](./coco-wholebody/vipnas_dark_coco-wholebody.md) |
+| ResNet-50 | 256x192 | 0.521 | 0.633 | [resnet_coco-wholebody.md](./coco-wholebody/resnet_coco-wholebody.md) |
+| S-ViPNAS-Res50 | 256x192 | 0.495 | 0.607 | [vipnas_coco-wholebody.md](./coco-wholebody/vipnas_coco-wholebody.md) |
+
+### UBody2D Dataset
+
+Result on UBody val set, computed with gt keypoints.
+
+| Model | Input Size | Whole AP | Whole AR | Details and Download |
+| :-------: | :--------: | :------: | :------: | :----------------------------------------------------------------------: |
+| HRNet-w32 | 256x192 | 0.690 | 0.729 | [hrnet_ubody-coco-wholebody.md](./ubody2d/hrnet_ubody-coco-wholebody.md) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-l_udp_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-l_udp_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..7182e7a3ed0f235cad12e512008689606ddb8d5c
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-l_udp_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,212 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=1.,
+ widen_factor=1.,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=1024,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-m_udp_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-m_udp_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..05fae649b8fe7d698255255531e878d954734edd
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-m_udp_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,212 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+max_epochs = 210
+stage2_num_epochs = 30
+base_lr = 4e-3
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=10)
+randomness = dict(seed=21)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=base_lr, weight_decay=0.05),
+ paramwise_cfg=dict(
+ norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0e-5,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=max_epochs // 2,
+ end=max_epochs,
+ T_max=max_epochs // 2,
+ by_epoch=True,
+ convert_to_iter_based=True),
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# codec settings
+codec = dict(
+ type='UDPHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ _scope_='mmdet',
+ type='CSPNeXt',
+ arch='P5',
+ expand_ratio=0.5,
+ deepen_factor=0.67,
+ widen_factor=0.75,
+ out_indices=(4, ),
+ channel_attention=True,
+ norm_cfg=dict(type='SyncBN'),
+ act_cfg=dict(type='SiLU'),
+ init_cfg=dict(
+ type='Pretrained',
+ prefix='backbone.',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'rtmdet/cspnext_rsb_pretrain/'
+ 'cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth')),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=768,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=False,
+ flip_mode='heatmap',
+ shift_heatmap=False,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/',
+# f'{data_root}': 's3://openmmlab/datasets/detection/coco/'
+# }))
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform', scale_factor=[0.6, 1.4], rotate_factor=80),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=1.0),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='mmdet.YOLOXHSVRandomAug'),
+ dict(
+ type='Albumentation',
+ transforms=[
+ dict(type='Blur', p=0.1),
+ dict(type='MedianBlur', p=0.1),
+ dict(
+ type='CoarseDropout',
+ max_holes=1,
+ max_height=0.4,
+ max_width=0.4,
+ min_holes=1,
+ min_height=0.2,
+ min_width=0.2,
+ p=0.5),
+ ]),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=10,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=10,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(
+ save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1))
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='mmdet.PipelineSwitchHook',
+ switch_epoch=max_epochs - stage2_num_epochs,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+# evaluators
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..1fc4a78dfbda287d33c6edd16d9d36944992f365
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.md
@@ -0,0 +1,56 @@
+
+
+
+
+
+
+
+
+RTMDet (ArXiv 2022)
+ +```bibtex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [pose_cspnext_m_udp](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-m_udp_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.687 | 0.735 | 0.680 | 0.763 | 0.697 | 0.755 | 0.460 | 0.543 | 0.567 | 0.641 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco-wholebody_pt-in1k_210e-256x192-320fa258_20230123.pth) | [log](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco-wholebody_pt-in1k_210e-256x192-320fa258_20230123.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ebdcc7146ef7969da2fdd26926c92268a9abae90
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.yml
@@ -0,0 +1,24 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext-m_udp_8xb64-210e_coco-wholebody-256x192.py
+ In Collection: UDP
+ Metadata:
+ Architecture: &id001
+ - UDP
+ - CSPNeXt
+ Training Data: COCO-WholeBody
+ Name: cspnext-m_udp_8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.687
+ Body AR: 0.735
+ Face AP: 0.697
+ Face AR: 0.755
+ Foot AP: 0.680
+ Foot AR: 0.763
+ Hand AP: 0.46
+ Hand AR: 0.567
+ Whole AP: 0.567
+ Whole AR: 0.641
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-coco-wholebody_pt-in1k_210e-256x192-320fa258_20230123.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..53f240bc528f9c81e65620fb33dbc4546519001c
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.md
@@ -0,0 +1,41 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [pose_hrnet_w32](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.678 | 0.755 | 0.543 | 0.661 | 0.630 | 0.708 | 0.467 | 0.566 | 0.536 | 0.636 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192-853765cd_20200918.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192_20200918.log.json) |
+| [pose_hrnet_w32](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288.py) | 384x288 | 0.700 | 0.772 | 0.585 | 0.691 | 0.726 | 0.783 | 0.515 | 0.603 | 0.586 | 0.673 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_384x288-78cacac3_20200922.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_384x288_20200922.log.json) |
+| [pose_hrnet_w48](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192.py) | 256x192 | 0.701 | 0.776 | 0.675 | 0.787 | 0.656 | 0.743 | 0.535 | 0.639 | 0.579 | 0.681 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_256x192-643e18cb_20200922.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_256x192_20200922.log.json) |
+| [pose_hrnet_w48](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288.py) | 384x288 | 0.722 | 0.791 | 0.696 | 0.801 | 0.776 | 0.834 | 0.587 | 0.678 | 0.632 | 0.717 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288-6e061c6a_20200922.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_20200922.log.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..929bd0535671b25499624cf41487008d4be27ab2
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.yml
@@ -0,0 +1,86 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.678
+ Body AR: 0.755
+ Face AP: 0.630
+ Face AR: 0.708
+ Foot AP: 0.543
+ Foot AR: 0.661
+ Hand AP: 0.467
+ Hand AR: 0.566
+ Whole AP: 0.536
+ Whole AR: 0.636
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192-853765cd_20200918.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.700
+ Body AR: 0.772
+ Face AP: 0.726
+ Face AR: 0.783
+ Foot AP: 0.585
+ Foot AR: 0.691
+ Hand AP: 0.515
+ Hand AR: 0.603
+ Whole AP: 0.586
+ Whole AR: 0.673
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_384x288-78cacac3_20200922.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.701
+ Body AR: 0.776
+ Face AP: 0.656
+ Face AR: 0.743
+ Foot AP: 0.675
+ Foot AR: 0.787
+ Hand AP: 0.535
+ Hand AR: 0.639
+ Whole AP: 0.579
+ Whole AR: 0.681
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_256x192-643e18cb_20200922.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.722
+ Body AR: 0.791
+ Face AP: 0.776
+ Face AR: 0.834
+ Foot AP: 0.696
+ Foot AR: 0.801
+ Hand AP: 0.587
+ Hand AR: 0.678
+ Whole AP: 0.632
+ Whole AR: 0.717
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288-6e061c6a_20200922.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..b215b3c5f25b595ca30ae54b743c907a53629084
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.md
@@ -0,0 +1,58 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [pose_hrnet_w32_dark](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.693 | 0.764 | 0.564 | 0.674 | 0.737 | 0.809 | 0.503 | 0.602 | 0.582 | 0.671 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192_dark-469327ef_20200922.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192_dark_20200922.log.json) |
+| [pose_hrnet_w48_dark+](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py) | 384x288 | 0.742 | 0.807 | 0.707 | 0.806 | 0.841 | 0.892 | 0.602 | 0.694 | 0.661 | 0.743 | [ckpt](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth) | [log](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark_20200918.log.json) |
+
+Note: `+` means the model is first pre-trained on original COCO dataset, and then fine-tuned on COCO-WholeBody dataset. We find this will lead to better performance.
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d0e2bd69542be8c482aee9498b9369e4151440c8
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.yml
@@ -0,0 +1,45 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ - DarkPose
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.693
+ Body AR: 0.764
+ Face AP: 0.737
+ Face AR: 0.809
+ Foot AP: 0.564
+ Foot AR: 0.674
+ Hand AP: 0.503
+ Hand AR: 0.602
+ Whole AP: 0.582
+ Whole AR: 0.671
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w32_coco_wholebody_256x192_dark-469327ef_20200922.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py
+ In Collection: DarkPose
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.742
+ Body AR: 0.807
+ Face AP: 0.841
+ Face AR: 0.892
+ Foot AP: 0.707
+ Foot AR: 0.806
+ Hand AP: 0.602
+ Hand AR: 0.694
+ Whole AP: 0.661
+ Whole AR: 0.743
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..e4a189833b6b731d0efe5a5e6b9426c9a78ce1b3
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.md
@@ -0,0 +1,43 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [pose_resnet_50](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.652 | 0.738 | 0.615 | 0.749 | 0.606 | 0.715 | 0.460 | 0.584 | 0.521 | 0.633 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_256x192-9e37ed88_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_256x192_20201004.log.json) |
+| [pose_resnet_50](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-384x288.py) | 384x288 | 0.666 | 0.747 | 0.634 | 0.763 | 0.731 | 0.811 | 0.536 | 0.646 | 0.574 | 0.670 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_384x288-ce11e294_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_384x288_20201004.log.json) |
+| [pose_resnet_101](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-256x192.py) | 256x192 | 0.669 | 0.753 | 0.637 | 0.766 | 0.611 | 0.722 | 0.463 | 0.589 | 0.531 | 0.645 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_256x192-7325f982_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_256x192_20201004.log.json) |
+| [pose_resnet_101](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-384x288.py) | 384x288 | 0.692 | 0.770 | 0.680 | 0.799 | 0.746 | 0.820 | 0.548 | 0.657 | 0.597 | 0.693 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_384x288-6c137b9a_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_384x288_20201004.log.json) |
+| [pose_resnet_152](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-256x192.py) | 256x192 | 0.682 | 0.764 | 0.661 | 0.787 | 0.623 | 0.728 | 0.481 | 0.607 | 0.548 | 0.661 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_256x192-5de8ae23_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_256x192_20201004.log.json) |
+| [pose_resnet_152](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-384x288.py) | 384x288 | 0.704 | 0.780 | 0.693 | 0.813 | 0.751 | 0.824 | 0.559 | 0.666 | 0.610 | 0.705 | [ckpt](https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_384x288-eab8caa8_20201004.pth) | [log](https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_384x288_20201004.log.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0e8db24f6acb4166776e7cbf4ba2109b1f2a28a3
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.yml
@@ -0,0 +1,128 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: &id001
+ - SimpleBaseline2D
+ Training Data: COCO-WholeBody
+ Name: td-hm_res50_8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.652
+ Body AR: 0.738
+ Face AP: 0.606
+ Face AR: 0.715
+ Foot AP: 0.615
+ Foot AR: 0.749
+ Hand AP: 0.46
+ Hand AR: 0.584
+ Whole AP: 0.521
+ Whole AR: 0.633
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_256x192-9e37ed88_20201004.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_res50_8xb64-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.666
+ Body AR: 0.747
+ Face AP: 0.731
+ Face AR: 0.811
+ Foot AP: 0.634
+ Foot AR: 0.763
+ Hand AP: 0.536
+ Hand AR: 0.646
+ Whole AP: 0.574
+ Whole AR: 0.67
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res50_coco_wholebody_384x288-ce11e294_20201004.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_res101_8xb32-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.669
+ Body AR: 0.753
+ Face AP: 0.611
+ Face AR: 0.722
+ Foot AP: 0.637
+ Foot AR: 0.766
+ Hand AP: 0.463
+ Hand AR: 0.589
+ Whole AP: 0.531
+ Whole AR: 0.645
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_256x192-7325f982_20201004.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_res101_8xb32-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.692
+ Body AR: 0.77
+ Face AP: 0.746
+ Face AR: 0.82
+ Foot AP: 0.68
+ Foot AR: 0.799
+ Hand AP: 0.548
+ Hand AR: 0.657
+ Whole AP: 0.598
+ Whole AR: 0.691
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res101_coco_wholebody_384x288-6c137b9a_20201004.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-256x192.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_res152_8xb32-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.682
+ Body AR: 0.764
+ Face AP: 0.623
+ Face AR: 0.728
+ Foot AP: 0.661
+ Foot AR: 0.787
+ Hand AP: 0.481
+ Hand AR: 0.607
+ Whole AP: 0.548
+ Whole AR: 0.661
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_256x192-5de8ae23_20201004.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-384x288.py
+ In Collection: SimpleBaseline2D
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_res152_8xb32-210e_coco-wholebody-384x288
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.704
+ Body AR: 0.78
+ Face AP: 0.751
+ Face AR: 0.824
+ Foot AP: 0.693
+ Foot AR: 0.813
+ Hand AP: 0.559
+ Hand AR: 0.666
+ Whole AP: 0.61
+ Whole AR: 0.705
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/resnet/res152_coco_wholebody_384x288-eab8caa8_20201004.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..2595e3fc13e6913a01af45fa8d7b9c6377511ddb
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..727fa9472ec9c446cb572e6c4fcd49976bf3916b
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..ffee1d1383e4757b79ed0ea4461c69d7b4247b15
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w32_dark-8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..892b4b7936123840c3192e87491123e5f11b3f7f
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-256x192.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..d587dbc45bf2f90a3912e263d63d0dc64205298a
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_8xb32-210e_coco-wholebody-384x288.py
@@ -0,0 +1,150 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..63175b99ea3e604fb87e1e45ef921aee2e7a1b16
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py
@@ -0,0 +1,154 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(288, 384),
+ heatmap_size=(72, 96),
+ sigma=3,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(48, 96)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(48, 96, 192)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(48, 96, 192, 384))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w48-8ef0771d.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=48,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..c0d8187ab47b54d445d3f125da596f381c494309
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..42e98575fba714ab65f3f19f226b5c06c2898a93
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res101_8xb32-210e_coco-wholebody-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=256)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet101'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..10c16eb71f9ac28ea6746e85d51ed526dd035abe
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..43ec5fb67c23df4e5e3d1c93072c41e0d08b88a6
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res152_8xb32-210e_coco-wholebody-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=152,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet152'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..e568c78b175bf3cc3364235c671d04944d84c53f
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-384x288.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-384x288.py
new file mode 100644
index 0000000000000000000000000000000000000000..6869d17ba998b7918133eefcf98fc3344e729a26
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_res50_8xb64-210e_coco-wholebody-384x288.py
@@ -0,0 +1,121 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(288, 384), heatmap_size=(72, 96), sigma=3)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..cad9c539bef73cce6fc8e48e9d91489ea9f72270
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,122 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ViPNAS_MobileNetV3'),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=160,
+ out_channels=133,
+ deconv_out_channels=(160, 160, 160),
+ deconv_num_groups=(160, 160, 160),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..d34ea50db64b6a2716469ebf872045b9308fc413
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,126 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(type='ViPNAS_MobileNetV3'),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=160,
+ out_channels=133,
+ deconv_out_channels=(160, 160, 160),
+ deconv_num_groups=(160, 160, 160),
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..822e4c698a54a82a62fd30f6cc891f814d024930
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,123 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ViPNAS_ResNet',
+ depth=50,
+ ),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=608,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..15b152fe96d3d60806c3461a04a0a4b5c66b3c96
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py
@@ -0,0 +1,127 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap',
+ input_size=(192, 256),
+ heatmap_size=(48, 64),
+ sigma=2,
+ unbiased=True)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ViPNAS_ResNet',
+ depth=50,
+ ),
+ head=dict(
+ type='ViPNASHead',
+ in_channels=608,
+ out_channels=133,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoWholeBodyDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ rotate_factor=60,
+ scale_factor=(0.75, 1.25)),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ pipeline=val_pipeline,
+ ))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file=data_root + 'annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..63fc0aed8af576808a7c6ee7dac89c3235d2ebfc
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [S-ViPNAS-MobileNetV3](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.619 | 0.700 | 0.477 | 0.608 | 0.585 | 0.689 | 0.386 | 0.505 | 0.473 | 0.578 | [ckpt](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192-0fee581a_20211205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192_20211205.log.json) |
+| [S-ViPNAS-Res50](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.643 | 0.726 | 0.553 | 0.694 | 0.587 | 0.698 | 0.410 | 0.529 | 0.495 | 0.607 | [ckpt](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192-49e1c3a4_20211112.pth) | [log](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_20211112.log.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..28148364075f0ea14c844965a82db732620fd3f2
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.yml
@@ -0,0 +1,44 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: &id001
+ - ViPNAS
+ Training Data: COCO-WholeBody
+ Name: td-hm_vipnas-mbv3_8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.619
+ Body AR: 0.7
+ Face AP: 0.585
+ Face AR: 0.689
+ Foot AP: 0.477
+ Foot AR: 0.608
+ Hand AP: 0.386
+ Hand AR: 0.505
+ Whole AP: 0.473
+ Whole AR: 0.578
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192-0fee581a_20211205.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_vipnas-res50_8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.643
+ Body AR: 0.726
+ Face AP: 0.587
+ Face AR: 0.698
+ Foot AP: 0.553
+ Foot AR: 0.694
+ Hand AP: 0.41
+ Hand AR: 0.529
+ Whole AP: 0.495
+ Whole AR: 0.607
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192-49e1c3a4_20211112.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..e39c66e913ab44ae58e511e987397ebae5e30fe1
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.md
@@ -0,0 +1,55 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [S-ViPNAS-MobileNetV3_dark](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.632 | 0.710 | 0.530 | 0.660 | 0.672 | 0.771 | 0.404 | 0.519 | 0.508 | 0.607 | [ckpt](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192_dark-e2158108_20211205.pth) | [log](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192_dark_20211205.log.json) |
+| [S-ViPNAS-Res50_dark](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.650 | 0.732 | 0.550 | 0.686 | 0.684 | 0.783 | 0.437 | 0.554 | 0.528 | 0.632 | [ckpt](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth) | [log](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark_20211112.log.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..5449af0ccd67ea433218a166b421888df3698ef8
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.yml
@@ -0,0 +1,45 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: &id001
+ - ViPNAS
+ - DarkPose
+ Training Data: COCO-WholeBody
+ Name: td-hm_vipnas-mbv3_dark-8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.632
+ Body AR: 0.71
+ Face AP: 0.672
+ Face AR: 0.771
+ Foot AP: 0.53
+ Foot AR: 0.66
+ Hand AP: 0.404
+ Hand AR: 0.519
+ Whole AP: 0.508
+ Whole AR: 0.607
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_mbv3_coco_wholebody_256x192_dark-e2158108_20211205.pth
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py
+ In Collection: ViPNAS
+ Metadata:
+ Architecture: *id001
+ Training Data: COCO-WholeBody
+ Name: td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.65
+ Body AR: 0.732
+ Face AP: 0.684
+ Face AR: 0.783
+ Foot AP: 0.55
+ Foot AR: 0.686
+ Hand AP: 0.437
+ Hand AR: 0.554
+ Whole AP: 0.528
+ Whole AR: 0.632
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_coco-wholebody.yml b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_coco-wholebody.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d51126cab856fe4120692788a455dbc660d6aa73
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_coco-wholebody.yml
@@ -0,0 +1,23 @@
+Models:
+- Config: configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/td-hm_hrnet-w32_8xb64-210e_ubody-256x192.py
+ In Collection: HRNet
+ Metadata:
+ Architecture: &id001
+ - HRNet
+ Training Data: UBody-COCO-WholeBody
+ Name: td-hm_hrnet-w32_8xb64-210e_ubody-256x192
+ Results:
+ - Dataset: COCO-WholeBody
+ Metrics:
+ Body AP: 0.678
+ Body AR: 0.755
+ Face AP: 0.630
+ Face AR: 0.708
+ Foot AP: 0.543
+ Foot AR: 0.661
+ Hand AP: 0.467
+ Hand AR: 0.566
+ Whole AP: 0.536
+ Whole AR: 0.636
+ Task: Wholebody 2D Keypoint
+ Weights: https://download.openmmlab.com/mmpose/v1/wholebody_2d_keypoint/ubody/td-hm_hrnet-w32_8xb64-210e_ubody-coco-256x192-7c227391_20230807.pth
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_ubody-coco-wholebody.md b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_ubody-coco-wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..bd62073847c80d25392564465a69e106c22bbf12
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_ubody-coco-wholebody.md
@@ -0,0 +1,38 @@
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
+Results on COCO-WholeBody v1.0 val with detector having human AP of 56.4 on COCO val2017 dataset
+
+| Arch | Input Size | Body AP | Body AR | Foot AP | Foot AR | Face AP | Face AR | Hand AP | Hand AR | Whole AP | Whole AR | ckpt | log |
+| :-------------------------------------- | :--------: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :-----: | :------: | :------: | :--------------------------------------: | :-------------------------------------: |
+| [pose_hrnet_w32](/configs/wholebody_2d_keypoint/topdown_heatmap/ubody/td-hm_hrnet-w32_8xb64-210e_coco-wholebody-256x192.py) | 256x192 | 0.685 | 0.759 | 0.564 | 0.675 | 0.625 | 0.705 | 0.516 | 0.609 | 0.549 | 0.646 | [ckpt](https://download.openmmlab.com/mmpose/v1/wholebody_2d_keypoint/ubody/td-hm_hrnet-w32_8xb64-210e_ubody-coco-256x192-7c227391_20230807.pth) | [log](https://download.openmmlab.com/mmpose/v1/wholebody_2d_keypoint/ubody/td-hm_hrnet-w32_8xb64-210e_ubody-coco-256x192-7c227391_20230807.json) |
diff --git a/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/td-hm_hrnet-w32_8xb64-210e_ubody-256x192.py b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/td-hm_hrnet-w32_8xb64-210e_ubody-256x192.py
new file mode 100644
index 0000000000000000000000000000000000000000..055484d0097a1f1538cc67de6062f19067c84a7c
--- /dev/null
+++ b/configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/td-hm_hrnet-w32_8xb64-210e_ubody-256x192.py
@@ -0,0 +1,173 @@
+_base_ = ['../../../_base_/default_runtime.py']
+
+# runtime
+train_cfg = dict(max_epochs=210, val_interval=10)
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(
+ type='Adam',
+ lr=5e-4,
+))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', begin=0, end=500, start_factor=0.001,
+ by_epoch=False), # warm-up
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=210,
+ milestones=[170, 200],
+ gamma=0.1,
+ by_epoch=True)
+]
+
+# automatically scaling LR based on the actual training batch size
+auto_scale_lr = dict(base_batch_size=512)
+
+# hooks
+default_hooks = dict(
+ checkpoint=dict(save_best='coco-wholebody/AP', rule='greater'))
+
+# codec settings
+codec = dict(
+ type='MSRAHeatmap', input_size=(192, 256), heatmap_size=(48, 64), sigma=2)
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='HRNet',
+ in_channels=3,
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmpose/'
+ 'pretrain_models/hrnet_w32-36af842e.pth'),
+ ),
+ head=dict(
+ type='HeatmapHead',
+ in_channels=32,
+ out_channels=133,
+ deconv_out_channels=None,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec),
+ test_cfg=dict(
+ flip_test=True,
+ flip_mode='heatmap',
+ shift_heatmap=True,
+ ))
+
+# base dataset settings
+dataset_type = 'UBody2dDataset'
+data_mode = 'topdown'
+data_root = 'data/UBody/'
+
+scenes = [
+ 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow',
+ 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing',
+ 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference'
+]
+
+train_datasets = [
+ dict(
+ type='CocoWholeBodyDataset',
+ data_root='data/coco/',
+ data_mode=data_mode,
+ ann_file='annotations/coco_wholebody_train_v1.0.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[])
+]
+
+for scene in scenes:
+ train_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_mode=data_mode,
+ ann_file=f'annotations/{scene}/train_annotations.json',
+ data_prefix=dict(img='images/'),
+ pipeline=[],
+ sample_interval=10)
+ train_datasets.append(train_dataset)
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec),
+ dict(type='PackPoseInputs')
+]
+val_pipeline = [
+ dict(type='LoadImage'),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+
+# data loaders
+train_dataloader = dict(
+ batch_size=64,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'),
+ datasets=train_datasets,
+ pipeline=train_pipeline,
+ test_mode=False,
+ ))
+val_dataloader = dict(
+ batch_size=32,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type='CocoWholeBodyDataset',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json',
+ data_prefix=dict(img='data/coco/val2017/'),
+ pipeline=val_pipeline,
+ bbox_file='data/coco/person_detection_results/'
+ 'COCO_val2017_detections_AP_H_56_person.json',
+ test_mode=True))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoWholeBodyMetric',
+ ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json')
+test_evaluator = val_evaluator
diff --git a/dataset-index.yml b/dataset-index.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b27e3fffefbc27ffd7ad29d2de12aca00940bdd6
--- /dev/null
+++ b/dataset-index.yml
@@ -0,0 +1,72 @@
+openxlab: true
+coco2017:
+ dataset: OpenDataLab/COCO_2017
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_coco2017.sh
+
+mpii:
+ dataset: OpenDataLab/MPII_Human_Pose
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_mpii.sh
+
+aic:
+ dataset: OpenDataLab/AI_Challenger
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_aic.sh
+
+crowdpose:
+ dataset: OpenDataLab/CrowdPose
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_crowdpose.sh
+
+halpe:
+ dataset: OpenDataLab/Halpe
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_halpe.sh
+
+lapa:
+ dataset: OpenDataLab/LaPa
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_lapa.sh
+
+300w:
+ dataset: OpenDataLab/300w
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_300w.sh
+
+wflw:
+ dataset: OpenDataLab/WFLW
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_wflw.sh
+
+onehand10k:
+ dataset: OpenDataLab/OneHand10K
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_onehand10k.sh
+
+freihand:
+ dataset: OpenDataLab/FreiHAND
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_freihand.sh
+
+ap10k:
+ dataset: OpenDataLab/AP-10K
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_ap10k.sh
+
+hagrid:
+ dataset: OpenDataLab/HaGRID
+ download_root: data
+ data_root: data/pose
+ script: tools/dataset_converters/scripts/preprocess_hagrid.sh
diff --git a/demo/MMPose_Tutorial.ipynb b/demo/MMPose_Tutorial.ipynb
new file mode 100644
index 0000000000000000000000000000000000000000..0e9ff9b57f1c623af817c18210e64a6008a52bd2
--- /dev/null
+++ b/demo/MMPose_Tutorial.ipynb
@@ -0,0 +1,3944 @@
+{
+ "cells": [
+ {
+ "attachments": {},
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "F77yOqgkX8p4"
+ },
+ "source": [
+ "UBody (CVPR'2023)
+ +```bibtex +@article{lin2023one, + title={One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer}, + author={Lin, Jing and Zeng, Ailing and Wang, Haoqian and Zhang, Lei and Li, Yu}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + year={2023}, +} +``` + +
+ +If you use a heatmap-based model and set argument `--draw-heatmap`, the predicted heatmap will be visualized together with the keypoints. + +The augement `--det-cat-id=15` selected detected bounding boxes with label 'cat'. 15 is the index of category 'cat' in COCO dataset, on which the detection model is trained. + +**COCO-animals** +In COCO dataset, there are 80 object categories, including 10 common `animal` categories (14: 'bird', 15: 'cat', 16: 'dog', 17: 'horse', 18: 'sheep', 19: 'cow', 20: 'elephant', 21: 'bear', 22: 'zebra', 23: 'giraffe'). + +For other animals, we have also provided some pre-trained animal detection models. Supported models can be found in [detection model zoo](/demo/docs/en/mmdet_modelzoo.md). + +To save visualized results on disk: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --output-root vis_results --draw-heatmap --det-cat-id=15 +``` + +To save predicted results on disk: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --output-root vis_results --save-predictions --draw-heatmap --det-cat-id=15 +``` + +To run demos on CPU: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_tiny_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_tiny_8xb32-300e_coco/rtmdet_tiny_8xb32-300e_coco_20220902_112414-78e30dcc.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --show --draw-heatmap --det-cat-id=15 --device cpu +``` + +### 2D Animal Pose Video Demo + +Videos share the same interface with images. The difference is that the `${INPUT_PATH}` for videos can be the local path or **URL** link to video file. + +For example, + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input demo/resources/
+ +The original video can be downloaded from [Google Drive](https://drive.google.com/file/d/18d8K3wuUpKiDFHvOx0mh1TEwYwpOc5UO/view?usp=sharing). + +### 2D Animal Pose Demo with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/ap10k \ + --pose2d animal --vis-out-dir vis_results/ap10k +``` + +This command infers all images located in `tests/data/ap10k` and saves the visualization results in the `vis_results/ap10k` directory. + +

 +
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+1. set `model.test_cfg.flip_test=False` in [animalpose_hrnet-w32](../../configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py#85).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/2d_face_demo.md b/demo/docs/en/2d_face_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..4e8dd70684032d4634307b8ceb41c5bf61c87920
--- /dev/null
+++ b/demo/docs/en/2d_face_demo.md
@@ -0,0 +1,101 @@
+## 2D Face Keypoint Demo
+
+We provide a demo script to test a single image or video with face detectors and top-down pose estimators. Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+**Face Bounding Box Model Preparation:** The pre-trained face box estimation model can be found in [mmdet model zoo](/demo/docs/en/mmdet_modelzoo.md#face-bounding-box-detection-models).
+
+### 2D Face Image Demo
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+The pre-trained face keypoint estimation models can be found from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/face_2d_keypoint.html).
+Take [aflw model](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256-f2bbc62b_20210125.pth) as an example:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \
+ https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \
+ configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \
+ --input tests/data/cofw/001766.jpg \
+ --show --draw-heatmap
+```
+
+Visualization result:
+
+
+
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+1. set `model.test_cfg.flip_test=False` in [animalpose_hrnet-w32](../../configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py#85).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/2d_face_demo.md b/demo/docs/en/2d_face_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..4e8dd70684032d4634307b8ceb41c5bf61c87920
--- /dev/null
+++ b/demo/docs/en/2d_face_demo.md
@@ -0,0 +1,101 @@
+## 2D Face Keypoint Demo
+
+We provide a demo script to test a single image or video with face detectors and top-down pose estimators. Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+**Face Bounding Box Model Preparation:** The pre-trained face box estimation model can be found in [mmdet model zoo](/demo/docs/en/mmdet_modelzoo.md#face-bounding-box-detection-models).
+
+### 2D Face Image Demo
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+The pre-trained face keypoint estimation models can be found from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/face_2d_keypoint.html).
+Take [aflw model](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256-f2bbc62b_20210125.pth) as an example:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \
+ https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \
+ configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \
+ --input tests/data/cofw/001766.jpg \
+ --show --draw-heatmap
+```
+
+Visualization result:
+
++ +If you use a heatmap-based model and set argument `--draw-heatmap`, the predicted heatmap will be visualized together with the keypoints. + +To save visualized results on disk: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \ + https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \ + configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \ + --input tests/data/cofw/001766.jpg \ + --draw-heatmap --output-root vis_results +``` + +To save the predicted results on disk, please specify `--save-predictions`. + +To run demos on CPU: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \ + https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \ + configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \ + --input tests/data/cofw/001766.jpg \ + --show --draw-heatmap --device=cpu +``` + +### 2D Face Video Demo + +Videos share the same interface with images. The difference is that the `${INPUT_PATH}` for videos can be the local path or **URL** link to video file. + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \ + https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \ + configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \ + --input demo/resources/
+ +The original video can be downloaded from [Google Drive](https://drive.google.com/file/d/1kQt80t6w802b_vgVcmiV_QfcSJ3RWzmb/view?usp=sharing). + +### 2D Face Pose Demo with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/wflw \ + --pose2d face --vis-out-dir vis_results/wflw --radius 1 +``` + +This command infers all images located in `tests/data/wflw` and saves the visualization results in the `vis_results/wflw` directory. + +
 +
+
+
+ +
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+For 2D face keypoint estimation models, try to edit the config file. For example, set `model.test_cfg.flip_test=False` in line 90 of [aflw_hrnetv2](../../../configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py).
diff --git a/demo/docs/en/2d_hand_demo.md b/demo/docs/en/2d_hand_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..cea74e2be4b1fafca6c6cc1e88cf5c5da232edc3
--- /dev/null
+++ b/demo/docs/en/2d_hand_demo.md
@@ -0,0 +1,100 @@
+## 2D Hand Keypoint Demo
+
+We provide a demo script to test a single image or video with hand detectors and top-down pose estimators. Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+**Hand Box Model Preparation:** The pre-trained hand box estimation model can be found in [mmdet model zoo](/demo/docs/en/mmdet_modelzoo.md#hand-bounding-box-detection-models).
+
+### 2D Hand Image Demo
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+The pre-trained hand pose estimation model can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/hand_2d_keypoint.html).
+Take [onehand10k model](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth) as an example:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \
+ configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \
+ --input tests/data/onehand10k/9.jpg \
+ --show --draw-heatmap
+```
+
+Visualization result:
+
+
+
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+For 2D face keypoint estimation models, try to edit the config file. For example, set `model.test_cfg.flip_test=False` in line 90 of [aflw_hrnetv2](../../../configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py).
diff --git a/demo/docs/en/2d_hand_demo.md b/demo/docs/en/2d_hand_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..cea74e2be4b1fafca6c6cc1e88cf5c5da232edc3
--- /dev/null
+++ b/demo/docs/en/2d_hand_demo.md
@@ -0,0 +1,100 @@
+## 2D Hand Keypoint Demo
+
+We provide a demo script to test a single image or video with hand detectors and top-down pose estimators. Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+**Hand Box Model Preparation:** The pre-trained hand box estimation model can be found in [mmdet model zoo](/demo/docs/en/mmdet_modelzoo.md#hand-bounding-box-detection-models).
+
+### 2D Hand Image Demo
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+The pre-trained hand pose estimation model can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/hand_2d_keypoint.html).
+Take [onehand10k model](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth) as an example:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \
+ configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \
+ --input tests/data/onehand10k/9.jpg \
+ --show --draw-heatmap
+```
+
+Visualization result:
+
++ +If you use a heatmap-based model and set argument `--draw-heatmap`, the predicted heatmap will be visualized together with the keypoints. + +To save visualized results on disk: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input tests/data/onehand10k/9.jpg \ + --output-root vis_results --show --draw-heatmap +``` + +To save the predicted results on disk, please specify `--save-predictions`. + +To run demos on CPU: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input tests/data/onehand10k/9.jpg \ + --show --draw-heatmap --device cpu +``` + +### 2D Hand Keypoints Video Demo + +Videos share the same interface with images. The difference is that the `${INPUT_PATH}` for videos can be the local path or **URL** link to video file. + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input data/tests_data_nvgesture_sk_color.avi \ + --output-root vis_results --kpt-thr 0.1 +``` + +
+ +The original video can be downloaded from [Github](https://raw.githubusercontent.com/open-mmlab/mmpose/master/tests/data/nvgesture/sk_color.avi). + +### 2D Hand Keypoints Demo with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/onehand10k \ + --pose2d hand --vis-out-dir vis_results/onehand10k \ + --bbox-thr 0.5 --kpt-thr 0.05 +``` + +This command infers all images located in `tests/data/onehand10k` and saves the visualization results in the `vis_results/onehand10k` directory. + +



 +
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+For 2D hand keypoint estimation models, try to edit the config file. For example, set `model.test_cfg.flip_test=False` in [onehand10k_hrnetv2](../../configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py#90).
diff --git a/demo/docs/en/2d_human_pose_demo.md b/demo/docs/en/2d_human_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..4e682cc8ffd916b84839e1de09e1f96a40b36112
--- /dev/null
+++ b/demo/docs/en/2d_human_pose_demo.md
@@ -0,0 +1,151 @@
+## 2D Human Pose Demo
+
+We provide demo scripts to perform human pose estimation on images or videos.
+
+### 2D Human Pose Top-Down Image Demo
+
+#### Use full image as input
+
+We provide a demo script to test a single image, using the full image as input bounding box.
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+If you use a heatmap-based model and set argument `--draw-heatmap`, the predicted heatmap will be visualized together with the keypoints.
+
+The pre-trained human pose estimation models can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/body_2d_keypoint.html).
+Take [coco model](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth) as an example:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap
+```
+
+To run this demo on CPU:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap \
+ --device=cpu
+```
+
+Visualization result:
+
+
+
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+For 2D hand keypoint estimation models, try to edit the config file. For example, set `model.test_cfg.flip_test=False` in [onehand10k_hrnetv2](../../configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py#90).
diff --git a/demo/docs/en/2d_human_pose_demo.md b/demo/docs/en/2d_human_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..4e682cc8ffd916b84839e1de09e1f96a40b36112
--- /dev/null
+++ b/demo/docs/en/2d_human_pose_demo.md
@@ -0,0 +1,151 @@
+## 2D Human Pose Demo
+
+We provide demo scripts to perform human pose estimation on images or videos.
+
+### 2D Human Pose Top-Down Image Demo
+
+#### Use full image as input
+
+We provide a demo script to test a single image, using the full image as input bounding box.
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+If you use a heatmap-based model and set argument `--draw-heatmap`, the predicted heatmap will be visualized together with the keypoints.
+
+The pre-trained human pose estimation models can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/body_2d_keypoint.html).
+Take [coco model](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth) as an example:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap
+```
+
+To run this demo on CPU:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap \
+ --device=cpu
+```
+
+Visualization result:
+
+
+ +#### Use mmdet for human bounding box detection + +We provide a demo script to run mmdet for human detection, and mmpose for pose estimation. + +Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0. + +```shell +python demo/topdown_demo_with_mmdet.py \ + ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \ + ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \ + --input ${INPUT_PATH} \ + [--output-root ${OUTPUT_DIR}] [--save-predictions] \ + [--show] [--draw-heatmap] [--device ${GPU_ID or CPU}] \ + [--bbox-thr ${BBOX_SCORE_THR}] [--kpt-thr ${KPT_SCORE_THR}] +``` + +Example: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ + configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ + --input tests/data/coco/000000197388.jpg --show --draw-heatmap \ + --output-root vis_results/ +``` + +Visualization result: + +
+ +To save the predicted results on disk, please specify `--save-predictions`. + +### 2D Human Pose Top-Down Video Demo + +The above demo script can also take video as input, and run mmdet for human detection, and mmpose for pose estimation. The difference is, the `${INPUT_PATH}` for videos can be the local path or **URL** link to video file. + +Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0. + +Example: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ + configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ + --input tests/data/posetrack18/videos/000001_mpiinew_test/000001_mpiinew_test.mp4 \ + --output-root=vis_results/demo --show --draw-heatmap +``` + +### 2D Human Pose Bottom-up Image/Video Demo + +We also provide a demo script using bottom-up models to estimate the human pose in an image or a video, which does not rely on human detectors. + +```shell +python demo/bottomup_demo.py \ + ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \ + --input ${INPUT_PATH} \ + [--output-root ${OUTPUT_DIR}] [--save-predictions] \ + [--show] [--device ${GPU_ID or CPU}] \ + [--kpt-thr ${KPT_SCORE_THR}] +``` + +Example: + +```shell +python demo/bottomup_demo.py \ + configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py \ + https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512_ac7c17bf-20221228.pth \ + --input tests/data/coco/000000197388.jpg --output-root=vis_results \ + --show --save-predictions +``` + +Visualization result: + +

+ +### 2D Human Pose Estimation with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py \ + tests/data/posetrack18/videos/000001_mpiinew_test/000001_mpiinew_test.mp4 \ + --pose2d human --vis-out-dir vis_results/posetrack18 +``` + +This command infers the video and saves the visualization results in the `vis_results/posetrack18` directory. + +
 +
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+For top-down models, try to edit the config file. For example,
+
+1. set `model.test_cfg.flip_test=False` in [topdown-res50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py#L56).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/2d_wholebody_pose_demo.md b/demo/docs/en/2d_wholebody_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..a4f9ace061aaf02675902fd3d7b437376ec8dfb7
--- /dev/null
+++ b/demo/docs/en/2d_wholebody_pose_demo.md
@@ -0,0 +1,113 @@
+## 2D Human Whole-Body Pose Demo
+
+### 2D Human Whole-Body Pose Top-Down Image Demo
+
+#### Use full image as input
+
+We provide a demo script to test a single image, using the full image as input bounding box.
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+The pre-trained hand pose estimation models can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/2d_wholebody_keypoint.html).
+Take [coco-wholebody_vipnas_res50_dark](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth) model as an example:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg
+```
+
+To run demos on CPU:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg \
+ --device=cpu
+```
+
+#### Use mmdet for human bounding box detection
+
+We provide a demo script to run mmdet for human detection, and mmpose for pose estimation.
+
+Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} \
+ [--output-root ${OUTPUT_DIR}] [--save-predictions] \
+ [--show] [--draw-heatmap] [--device ${GPU_ID or CPU}] \
+ [--bbox-thr ${BBOX_SCORE_THR}] [--kpt-thr ${KPT_SCORE_THR}]
+```
+
+Examples:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input tests/data/coco/000000196141.jpg \
+ --output-root vis_results/ --show
+```
+
+To save the predicted results on disk, please specify `--save-predictions`.
+
+### 2D Human Whole-Body Pose Top-Down Video Demo
+
+The above demo script can also take video as input, and run mmdet for human detection, and mmpose for pose estimation.
+
+Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection).
+
+Examples:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input https://user-images.githubusercontent.com/87690686/137440639-fb08603d-9a35-474e-b65f-46b5c06b68d6.mp4 \
+ --output-root vis_results/ --show
+```
+
+Visualization result:
+
+
+
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+For top-down models, try to edit the config file. For example,
+
+1. set `model.test_cfg.flip_test=False` in [topdown-res50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py#L56).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/2d_wholebody_pose_demo.md b/demo/docs/en/2d_wholebody_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..a4f9ace061aaf02675902fd3d7b437376ec8dfb7
--- /dev/null
+++ b/demo/docs/en/2d_wholebody_pose_demo.md
@@ -0,0 +1,113 @@
+## 2D Human Whole-Body Pose Demo
+
+### 2D Human Whole-Body Pose Top-Down Image Demo
+
+#### Use full image as input
+
+We provide a demo script to test a single image, using the full image as input bounding box.
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+The pre-trained hand pose estimation models can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/2d_wholebody_keypoint.html).
+Take [coco-wholebody_vipnas_res50_dark](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth) model as an example:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg
+```
+
+To run demos on CPU:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg \
+ --device=cpu
+```
+
+#### Use mmdet for human bounding box detection
+
+We provide a demo script to run mmdet for human detection, and mmpose for pose estimation.
+
+Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection) with version >= 3.0.
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} \
+ [--output-root ${OUTPUT_DIR}] [--save-predictions] \
+ [--show] [--draw-heatmap] [--device ${GPU_ID or CPU}] \
+ [--bbox-thr ${BBOX_SCORE_THR}] [--kpt-thr ${KPT_SCORE_THR}]
+```
+
+Examples:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input tests/data/coco/000000196141.jpg \
+ --output-root vis_results/ --show
+```
+
+To save the predicted results on disk, please specify `--save-predictions`.
+
+### 2D Human Whole-Body Pose Top-Down Video Demo
+
+The above demo script can also take video as input, and run mmdet for human detection, and mmpose for pose estimation.
+
+Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection).
+
+Examples:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input https://user-images.githubusercontent.com/87690686/137440639-fb08603d-9a35-474e-b65f-46b5c06b68d6.mp4 \
+ --output-root vis_results/ --show
+```
+
+Visualization result:
+
+
+ +### 2D Human Whole-Body Pose Estimation with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/crowdpose \ + --pose2d wholebody --vis-out-dir vis_results/crowdpose +``` + +This command infers all images located in `tests/data/crowdpose` and saves the visualization results in the `vis_results/crowdpose` directory. + +

 +
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+For top-down models, try to edit the config file. For example,
+
+1. set `model.test_cfg.flip_test=False` in [pose_hrnet_w48_dark+](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py#L90).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/3d_hand_demo.md b/demo/docs/en/3d_hand_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..edd1a4fa6e5bcbd40f00c0352a674c12e397a4b4
--- /dev/null
+++ b/demo/docs/en/3d_hand_demo.md
@@ -0,0 +1,52 @@
+## 3D Hand Demo
+
+
+
+In addition, the Inferencer supports saving predicted poses. For more information, please refer to the [inferencer document](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface).
+
+### Speed Up Inference
+
+Some tips to speed up MMPose inference:
+
+For top-down models, try to edit the config file. For example,
+
+1. set `model.test_cfg.flip_test=False` in [pose_hrnet_w48_dark+](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py#L90).
+2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
diff --git a/demo/docs/en/3d_hand_demo.md b/demo/docs/en/3d_hand_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..edd1a4fa6e5bcbd40f00c0352a674c12e397a4b4
--- /dev/null
+++ b/demo/docs/en/3d_hand_demo.md
@@ -0,0 +1,52 @@
+## 3D Hand Demo
+
+
+ +### 3D Hand Estimation Image Demo + +#### Using gt hand bounding boxes as input + +We provide a demo script to test a single image, given gt json file. + +```shell +python demo/hand3d_internet_demo.py \ + ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \ + --input ${INPUT_FILE} \ + --output-root ${OUTPUT_ROOT} \ + [--save-predictions] \ + [--gt-joints-file ${GT_JOINTS_FILE}]\ + [--disable-rebase-keypoint] \ + [--show] \ + [--device ${GPU_ID or CPU}] \ + [--kpt-thr ${KPT_THR}] \ + [--show-kpt-idx] \ + [--show-interval] \ + [--radius ${RADIUS}] \ + [--thickness ${THICKNESS}] +``` + +The pre-trained hand pose estimation model can be downloaded from [model zoo](https://mmpose.readthedocs.io/en/latest/model_zoo/hand_3d_keypoint.html). +Take [internet model](https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth) as an example: + +```shell +python demo/hand3d_internet_demo.py \ + configs/hand_3d_keypoint/internet/interhand3d/internet_res50_4xb16-20e_interhand3d-256x256.py \ + https://download.openmmlab.com/mmpose/hand3d/internet/res50_intehand3dv1.0_all_256x256-42b7f2ac_20210702.pth \ + --input tests/data/interhand2.6m/image69148.jpg \ + --save-predictions \ + --output-root vis_results +``` + +### 3D Hand Pose Estimation with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/interhand2.6m/image29590.jpg --pose3d hand3d --vis-out-dir vis_results/hand3d +``` + +This command infers the image and saves the visualization results in the `vis_results/hand3d` directory. + +
+ +### 3D Human Pose Two-stage Estimation Demo + +#### Using mmdet for human bounding box detection and top-down model for the 1st stage (2D pose detection), and inference the 2nd stage (2D-to-3D lifting) + +Assume that you have already installed [mmdet](https://github.com/open-mmlab/mmdetection). + +```shell +python demo/body3d_pose_lifter_demo.py \ +${MMDET_CONFIG_FILE} \ +${MMDET_CHECKPOINT_FILE} \ +${MMPOSE_CONFIG_FILE_2D} \ +${MMPOSE_CHECKPOINT_FILE_2D} \ +${MMPOSE_CONFIG_FILE_3D} \ +${MMPOSE_CHECKPOINT_FILE_3D} \ +--input ${VIDEO_PATH or IMAGE_PATH or 'webcam'} \ +[--show] \ +[--disable-rebase-keypoint] \ +[--disable-norm-pose-2d] \ +[--num-instances ${NUM_INSTANCES}] \ +[--output-root ${OUT_VIDEO_ROOT}] \ +[--save-predictions] \ +[--device ${GPU_ID or CPU}] \ +[--det-cat-id ${DET_CAT_ID}] \ +[--bbox-thr ${BBOX_THR}] \ +[--kpt-thr ${KPT_THR}] \ +[--use-oks-tracking] \ +[--tracking-thr ${TRACKING_THR}] \ +[--show-interval ${INTERVAL}] \ +[--thickness ${THICKNESS}] \ +[--radius ${RADIUS}] \ +[--online] +``` + +Note that + +1. `${VIDEO_PATH}` can be the local path or **URL** link to video file. + +2. If the `[--online]` option is set to **True**, future frame information can **not** be used when using multi frames for inference in the 2D pose detection stage. + +Examples: + +During 2D pose detection, for single-frame inference that do not rely on extra frames to get the final results of the current frame and save the prediction results, try this: + +```shell +python demo/body3d_pose_lifter_demo.py \ +demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ +https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ +configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ +https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ +configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py \ +https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft-88f5abbb_20210527.pth \ +--input https://user-images.githubusercontent.com/87690686/164970135-b14e424c-765a-4180-9bc8-fa8d6abc5510.mp4 \ +--output-root vis_results \ +--save-predictions +``` + +During 2D pose detection, for multi-frame inference that rely on extra frames to get the final results of the current frame, try this: + +```shell +python demo/body3d_pose_lifter_demo.py \ +demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ +https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ +configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ +https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ +configs/body_3d_keypoint/video_pose_lift/h36m/video-pose-lift_tcn-243frm-supv-cpn-ft_8xb128-200e_h36m.py \ +https://download.openmmlab.com/mmpose/body3d/videopose/videopose_h36m_243frames_fullconv_supervised_cpn_ft-88f5abbb_20210527.pth \ +--input https://user-images.githubusercontent.com/87690686/164970135-b14e424c-765a-4180-9bc8-fa8d6abc5510.mp4 \ +--output-root vis_results \ +--online +``` + +### 3D Human Pose Demo with Inferencer + +The Inferencer provides a convenient interface for inference, allowing customization using model aliases instead of configuration files and checkpoint paths. It supports various input formats, including image paths, video paths, image folder paths, and webcams. Below is an example command: + +```shell +python demo/inferencer_demo.py tests/data/coco/000000000785.jpg \ + --pose3d human3d --vis-out-dir vis_results/human3d +``` + +This command infers the image and saves the visualization results in the `vis_results/human3d` directory. + +
+ +如果使用了 heatmap-based 模型同时设置了 `--draw-heatmap` ,预测的热图也会跟随关键点一同可视化出来。 + +`--det-cat-id=15` 参数用来指定模型只检测 `cat` 类型,这是基于 COCO 数据集的数据。 + +**COCO 数据集动物信息** + +COCO 数据集共包含 80 个类别,其中有 10 种常见动物,类别如下: + +(14: 'bird', 15: 'cat', 16: 'dog', 17: 'horse', 18: 'sheep', 19: 'cow', 20: 'elephant', 21: 'bear', 22: 'zebra', 23: 'giraffe') + +对于其他类型的动物,我们也提供了一些训练好的动物检测模型,用户可以前往 [detection model zoo](/demo/docs/zh_cn/mmdet_modelzoo.md) 下载。 + +如果想本地保存可视化结果可使用如下命令: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --output-root vis_results --draw-heatmap --det-cat-id=15 +``` + +如果想本地保存预测结果,需要使用 `--save-predictions` 。 + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --output-root vis_results --save-predictions --draw-heatmap --det-cat-id=15 +``` + +仅使用 CPU: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_tiny_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_tiny_8xb32-300e_coco/rtmdet_tiny_8xb32-300e_coco_20220902_112414-78e30dcc.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input tests/data/animalpose/ca110.jpeg \ + --show --draw-heatmap --det-cat-id=15 --device cpu +``` + +### 2D 动物视频姿态识别推理 + +视频和图片使用了同样的接口,区别在于视频推理时 `${INPUT_PATH}` 既可以是本地视频文件的路径也可以是视频文件的 **URL** 地址。 + +例如: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py \ + https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth \ + configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py \ + https://download.openmmlab.com/mmpose/animal/hrnet/hrnet_w32_animalpose_256x256-1aa7f075_20210426.pth \ + --input demo/resources/
+ +这段视频可以在 [Google Drive](https://drive.google.com/file/d/18d8K3wuUpKiDFHvOx0mh1TEwYwpOc5UO/view?usp=sharing) 下载。 + +### 使用 Inferencer 进行 2D 动物姿态识别推理 + +Inferencer 提供一个更便捷的推理接口,使得用户可以绕过模型的配置文件和 checkpoint 路径直接使用 model aliases ,支持包括图片路径、视频路径、图片文件夹路径和 webcams 在内的多种输入方式,例如可以这样使用: + +```shell +python demo/inferencer_demo.py tests/data/ap10k \ + --pose2d animal --vis-out-dir vis_results/ap10k +``` + +该命令会对输入的 `tests/data/ap10k` 下所有的图片进行推理并且把可视化结果都存入 `vis_results/ap10k` 文件夹下。 + +
+
+Inferencer 同样支持保存预测结果,更多的信息可以参考 [Inferencer 文档](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface) 。
+
+### 加速推理
+
+用户可以通过修改配置文件来加速,更多具体例子可以参考:
+
+1. 设置 `model.test_cfg.flip_test=False`,如 [animalpose_hrnet-w32](../../configs/animal_2d_keypoint/topdown_heatmap/animalpose/td-hm_hrnet-w32_8xb64-210e_animalpose-256x256.py#85) 所示。
+2. 使用更快的 bounding box 检测器,可参考 [MMDetection](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html) 。
diff --git a/demo/docs/zh_cn/2d_face_demo.md b/demo/docs/zh_cn/2d_face_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..78091f1ffed9c88282f6c6394936b24eb78f430c
--- /dev/null
+++ b/demo/docs/zh_cn/2d_face_demo.md
@@ -0,0 +1,88 @@
+## 2D Face Keypoint Demo
+
+本节我们继续演示如何使用 demo 脚本进行 2D 脸部关键点的识别。同样的,用户仍要确保开发环境已经安装了 3.0 版本以上的 [MMdetection](https://github.com/open-mmlab/mmdetection) 。
+
+我们在 [mmdet model zoo](/demo/docs/zh_cn/mmdet_modelzoo.md#脸部-bounding-box-检测模型) 提供了一个预训练好的脸部 Bounding Box 预测模型,用户可以前往下载。
+
+### 2D 脸部图片关键点识别推理
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+用户可以在 [model zoo](https://mmpose.readthedocs.io/en/dev-1.x/model_zoo/face_2d_keypoint.html) 获取预训练好的脸部关键点识别模型。
+
+这里我们用 [face6 model](https://download.openmmlab.com/mmpose/face/hrnetv2/hrnetv2_w18_aflw_256x256-f2bbc62b_20210125.pth) 来进行演示:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \
+ https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \
+ configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \
+ --input tests/data/cofw/001766.jpg \
+ --show --draw-heatmap
+```
+
+可视化结果如下图所示:
+
++ +如果使用了 heatmap-based 模型同时设置了 `--draw-heatmap` ,预测的热图也会跟随关键点一同可视化出来。 + +如果想本地保存可视化结果可使用如下命令: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \ + https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \ + configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \ + --input tests/data/cofw/001766.jpg \ + --draw-heatmap --output-root vis_results +``` + +### 2D 脸部视频关键点识别推理 + +视频和图片使用了同样的接口,区别在于视频推理时 `${INPUT_PATH}` 既可以是本地视频文件的路径也可以是视频文件的 **URL** 地址。 + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py \ + https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth \ + configs/face_2d_keypoint/rtmpose/face6/rtmpose-m_8xb256-120e_face6-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth \ + --input demo/resources/
+ +这段视频可以在 [Google Drive](https://drive.google.com/file/d/1kQt80t6w802b_vgVcmiV_QfcSJ3RWzmb/view?usp=sharing) 下载。 + +### 使用 Inferencer 进行 2D 脸部关键点识别推理 + +Inferencer 提供一个更便捷的推理接口,使得用户可以绕过模型的配置文件和 checkpoint 路径直接使用 model aliases ,支持包括图片路径、视频路径、图片文件夹路径和 webcams 在内的多种输入方式,例如可以这样使用: + +```shell +python demo/inferencer_demo.py tests/data/wflw \ + --pose2d face --vis-out-dir vis_results/wflw --radius 1 +``` + +该命令会对输入的 `tests/data/wflw` 下所有的图片进行推理并且把可视化结果都存入 `vis_results/wflw` 文件夹下。 + +
+
+
+
+除此之外, Inferencer 也支持保存预测的姿态结果。具体信息可在 [Inferencer 文档](https://mmpose.readthedocs.io/en/dev-1.x/user_guides/inference.html#inferencer-a-unified-inference-interface) 查看。
+
+### 加速推理
+
+对于 2D 脸部关键点预测模型,用户可以通过修改配置文件中的 `model.test_cfg.flip_test=False` 来加速,例如 [aflw_hrnetv2](../../../configs/face_2d_keypoint/topdown_heatmap/aflw/td-hm_hrnetv2-w18_8xb64-60e_aflw-256x256.py) 中的第 90 行。
diff --git a/demo/docs/zh_cn/2d_hand_demo.md b/demo/docs/zh_cn/2d_hand_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..886aace38e8674730de589636e365b55a578d94e
--- /dev/null
+++ b/demo/docs/zh_cn/2d_hand_demo.md
@@ -0,0 +1,103 @@
+## 2D Hand Keypoint Demo
+
+本节我们继续通过 demo 脚本演示对单张图片或者视频的 2D 手部关键点的识别。同样的,用户仍要确保开发环境已经安装了 3.0 版本以上的 [MMDetection](https://github.com/open-mmlab/mmdetection) 。
+
+我们在 [mmdet model zoo](/demo/docs/zh_cn/mmdet_modelzoo.md#手部-bounding-box-识别模型) 提供了预训练好的手部 Bounding Box 预测模型,用户可以前往下载。
+
+### 2D 手部图片关键点识别
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} [--output-root ${OUTPUT_DIR}] \
+ [--show] [--device ${GPU_ID or CPU}] [--save-predictions] \
+ [--draw-heatmap ${DRAW_HEATMAP}] [--radius ${KPT_RADIUS}] \
+ [--kpt-thr ${KPT_SCORE_THR}] [--bbox-thr ${BBOX_SCORE_THR}]
+```
+
+用户可以在 [model zoo](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo/hand_2d_keypoint.html) 获取预训练好的关键点识别模型。
+
+这里我们用 [onehand10k model](https://download.openmmlab.com/mmpose/hand/hrnetv2/hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth) 来进行演示:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \
+ configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \
+ --input tests/data/onehand10k/9.jpg \
+ --show --draw-heatmap
+```
+
+可视化结果如下:
+
++ +如果使用了 heatmap-based 模型同时设置了 `--draw-heatmap` ,预测的热图也会跟随关键点一同可视化出来。 + +如果想本地保存可视化结果可使用如下命令: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input tests/data/onehand10k/9.jpg \ + --output-root vis_results --show --draw-heatmap +``` + +如果想本地保存预测结果,需要添加 `--save-predictions` 。 + +如果想用 CPU 进行 demo 需添加 `--device cpu` : + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input tests/data/onehand10k/9.jpg \ + --show --draw-heatmap --device cpu +``` + +### 2D 手部视频关键点识别推理 + +视频和图片使用了同样的接口,区别在于视频推理时 `${INPUT_PATH}` 既可以是本地视频文件的路径也可以是视频文件的 **URL** 地址。 + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth \ + configs/hand_2d_keypoint/rtmpose/hand5/rtmpose-m_8xb256-210e_hand5-256x256.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth \ + --input data/tests_data_nvgesture_sk_color.avi \ + --output-root vis_results --kpt-thr 0.1 +``` + +
+ +

+ +这段视频可以在 [Google Drive](https://raw.githubusercontent.com/open-mmlab/mmpose/master/tests/data/nvgesture/sk_color.avi) 下载到。 + +### 使用 Inferencer 进行 2D 手部关键点识别推理 + +Inferencer 提供一个更便捷的推理接口,使得用户可以绕过模型的配置文件和 checkpoint 路径直接使用 model aliases ,支持包括图片路径、视频路径、图片文件夹路径和 webcams 在内的多种输入方式,例如可以这样使用: + +```shell +python demo/inferencer_demo.py tests/data/onehand10k \ + --pose2d hand --vis-out-dir vis_results/onehand10k \ + --bbox-thr 0.5 --kpt-thr 0.05 +``` + +该命令会对输入的 `tests/data/onehand10k` 下所有的图片进行推理并且把可视化结果都存入 `vis_results/onehand10k` 文件夹下。 + +
+
+除此之外, Inferencer 也支持保存预测的姿态结果。具体信息可在 [Inferencer 文档](https://mmpose.readthedocs.io/zh_CN/dev-1.x/user_guides/inference.html) 查看。
+
+### 加速推理
+
+对于 2D 手部关键点预测模型,用户可以通过修改配置文件中的 `model.test_cfg.flip_test=False` 来加速,如 [onehand10k_hrnetv2](../../configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py#90) 所示。
diff --git a/demo/docs/zh_cn/2d_human_pose_demo.md b/demo/docs/zh_cn/2d_human_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..b39e510891adb637345d90d0d9465e2aade44cc9
--- /dev/null
+++ b/demo/docs/zh_cn/2d_human_pose_demo.md
@@ -0,0 +1,146 @@
+## 2D Human Pose Demo
+
+本节我们继续使用 demo 脚本演示 2D 人体关键点的识别。同样的,用户仍要确保开发环境已经安装了 3.0 版本以上的 [mmdet](https://github.com/open-mmlab/mmdetection) 。
+
+### 2D 人体姿态 Top-Down 图片检测
+
+#### 使用整张图片作为输入进行检测
+
+此时输入的整张图片会被当作 bounding box 使用。
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+如果使用了 heatmap-based 模型同时设置了 `--draw-heatmap` ,预测的热图也会跟随关键点一同可视化出来。
+
+用户可以在 [model zoo](https://mmpose.readthedocs.io/zh_CN/latest/model_zoo/body_2d_keypoint.html) 获取预训练好的关键点识别模型。
+
+这里我们用 [coco model](https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth) 来进行演示:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap
+```
+
+使用 CPU 推理:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth \
+ --out-file vis_results.jpg \
+ --draw-heatmap \
+ --device=cpu
+```
+
+可视化结果如下:
+
++ +#### 使用 MMDet 做人体 bounding box 检测 + +使用 MMDet 进行识别的命令如下所示: + +```shell +python demo/topdown_demo_with_mmdet.py \ + ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \ + ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \ + --input ${INPUT_PATH} \ + [--output-root ${OUTPUT_DIR}] [--save-predictions] \ + [--show] [--draw-heatmap] [--device ${GPU_ID or CPU}] \ + [--bbox-thr ${BBOX_SCORE_THR}] [--kpt-thr ${KPT_SCORE_THR}] +``` + +结合我们的具体例子: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ + configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ + --input tests/data/coco/000000197388.jpg --show --draw-heatmap \ + --output-root vis_results/ +``` + +可视化结果如下: + +
+ +想要本地保存识别结果,用户需要加上 `--save-predictions` 。 + +### 2D 人体姿态 Top-Down 视频检测 + +我们的脚本同样支持视频作为输入,由 MMDet 完成人体检测后 MMPose 完成 Top-Down 的姿态预估,视频推理时 `${INPUT_PATH}` 既可以是本地视频文件的路径也可以是视频文件的 **URL** 地址。 + +例如: + +```shell +python demo/topdown_demo_with_mmdet.py \ + demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \ + configs/body_2d_keypoint/rtmpose/body8/rtmpose-m_8xb256-420e_body8-256x192.py \ + https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth \ + --input tests/data/posetrack18/videos/000001_mpiinew_test/000001_mpiinew_test.mp4 \ + --output-root=vis_results/demo --show --draw-heatmap +``` + +### 2D 人体姿态 Bottom-Up 图片和视频识别检测 + +除了 Top-Down ,我们也支持 Bottom-Up 不依赖人体识别器的人体姿态预估识别,使用方式如下: + +```shell +python demo/bottomup_demo.py \ + ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \ + --input ${INPUT_PATH} \ + [--output-root ${OUTPUT_DIR}] [--save-predictions] \ + [--show] [--device ${GPU_ID or CPU}] \ + [--kpt-thr ${KPT_SCORE_THR}] +``` + +结合具体示例如下: + +```shell +python demo/bottomup_demo.py \ + configs/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512.py \ + https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/dekr/coco/dekr_hrnet-w32_8xb10-140e_coco-512x512_ac7c17bf-20221228.pth \ + --input tests/data/coco/000000197388.jpg --output-root=vis_results \ + --show --save-predictions +``` + +其可视化结果如图所示: + +
+ +### 使用 Inferencer 进行 2D 人体姿态识别检测 + +Inferencer 提供一个更便捷的推理接口,使得用户可以绕过模型的配置文件和 checkpoint 路径直接使用 model aliases ,支持包括图片路径、视频路径、图片文件夹路径和 webcams 在内的多种输入方式,例如可以这样使用: + +```shell +python demo/inferencer_demo.py \ + tests/data/posetrack18/videos/000001_mpiinew_test/000001_mpiinew_test.mp4 \ + --pose2d human --vis-out-dir vis_results/posetrack18 +``` + +该命令会对输入的 `tests/data/posetrack18` 下的视频进行推理并且把可视化结果存入 `vis_results/posetrack18` 文件夹下。 + +
+
+Inferencer 支持保存姿态的检测结果,具体的使用可参考 [inferencer document](https://mmpose.readthedocs.io/zh_CN/dev-1.x/user_guides/inference.html) 。
+
+### 加速推理
+
+对于 top-down 结构的模型,用户可以通过修改配置文件来加速,更多具体例子可以参考:
+
+1. 设置 `model.test_cfg.flip_test=False`,如 [topdown-res50](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py#L56) 所示。
+2. 使用更快的人体 bounding box 检测器,可参考 [MMDetection](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html) 。
diff --git a/demo/docs/zh_cn/2d_wholebody_pose_demo.md b/demo/docs/zh_cn/2d_wholebody_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..6c4d77e3dfbf3bd10b152e44df303beb906d7d3d
--- /dev/null
+++ b/demo/docs/zh_cn/2d_wholebody_pose_demo.md
@@ -0,0 +1,108 @@
+## 2D Human Whole-Body Pose Demo
+
+### 2D 人体全身姿态 Top-Down 图片识别
+
+#### 使用整张图片作为输入进行检测
+
+此时输入的整张图片会被当作 bounding box 使用。
+
+```shell
+python demo/image_demo.py \
+ ${IMG_FILE} ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --out-file ${OUTPUT_FILE} \
+ [--device ${GPU_ID or CPU}] \
+ [--draw_heatmap]
+```
+
+用户可以在 [model zoo](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo/2d_wholebody_keypoint.html) 获取预训练好的关键点识别模型。
+
+这里我们用 [coco-wholebody_vipnas_res50_dark](https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth) 来进行演示:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg
+```
+
+使用 CPU 推理:
+
+```shell
+python demo/image_demo.py \
+ tests/data/coco/000000000785.jpg \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_vipnas-res50_dark-8xb64-210e_coco-wholebody-256x192.py \
+ https://download.openmmlab.com/mmpose/top_down/vipnas/vipnas_res50_wholebody_256x192_dark-67c0ce35_20211112.pth \
+ --out-file vis_results.jpg \
+ --device=cpu
+```
+
+#### 使用 MMDet 进行人体 bounding box 检测
+
+使用 MMDet 进行识别的命令格式如下:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ ${MMDET_CONFIG_FILE} ${MMDET_CHECKPOINT_FILE} \
+ ${MMPOSE_CONFIG_FILE} ${MMPOSE_CHECKPOINT_FILE} \
+ --input ${INPUT_PATH} \
+ [--output-root ${OUTPUT_DIR}] [--save-predictions] \
+ [--show] [--draw-heatmap] [--device ${GPU_ID or CPU}] \
+ [--bbox-thr ${BBOX_SCORE_THR}] [--kpt-thr ${KPT_SCORE_THR}]
+```
+
+具体可例如:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input tests/data/coco/000000196141.jpg \
+ --output-root vis_results/ --show
+```
+
+想要本地保存识别结果,用户需要加上 `--save-predictions` 。
+
+### 2D 人体全身姿态 Top-Down 视频识别检测
+
+我们的脚本同样支持视频作为输入,由 MMDet 完成人体检测后 MMPose 完成 Top-Down 的姿态预估。
+
+例如:
+
+```shell
+python demo/topdown_demo_with_mmdet.py \
+ demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth \
+ configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py \
+ https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_wholebody_384x288_dark-f5726563_20200918.pth \
+ --input https://user-images.githubusercontent.com/87690686/137440639-fb08603d-9a35-474e-b65f-46b5c06b68d6.mp4 \
+ --output-root vis_results/ --show
+```
+
+可视化结果如下:
+
++ +### 使用 Inferencer 进行 2D 人体全身姿态识别 + +Inferencer 提供一个更便捷的推理接口,使得用户可以绕过模型的配置文件和 checkpoint 路径直接使用 model aliases ,支持包括图片路径、视频路径、图片文件夹路径和 webcams 在内的多种输入方式,例如可以这样使用: + +```shell +python demo/inferencer_demo.py tests/data/crowdpose \ + --pose2d wholebody --vis-out-dir vis_results/crowdpose +``` + +该命令会对输入的 `tests/data/crowdpose` 下所有图片进行推理并且把可视化结果存入 `vis_results/crowdpose` 文件夹下。 + +
+
+Inferencer 支持保存姿态的检测结果,具体的使用可参考 [Inferencer 文档](https://mmpose.readthedocs.io/zh_CN/dev-1.x/user_guides/#inferencer-a-unified-inference-interface) 。
+
+### 加速推理
+
+对于 top-down 结构的模型,用户可以通过修改配置文件来加速,更多具体例子可以参考:
+
+1. 设置 `model.test_cfg.flip_test=False`,用户可参考 [pose_hrnet_w48_dark+](/configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/td-hm_hrnet-w48_dark-8xb32-210e_coco-wholebody-384x288.py#L90) 。
+2. 使用更快的人体 bounding box 检测器,如 [MMDetection](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html) 。
diff --git a/demo/docs/zh_cn/3d_human_pose_demo.md b/demo/docs/zh_cn/3d_human_pose_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..6ed9dd67de1326d5c31e0edf2bb5ae549bb71789
--- /dev/null
+++ b/demo/docs/zh_cn/3d_human_pose_demo.md
@@ -0,0 +1 @@
+coming soon
diff --git a/demo/docs/zh_cn/mmdet_modelzoo.md b/demo/docs/zh_cn/mmdet_modelzoo.md
new file mode 100644
index 0000000000000000000000000000000000000000..1cb12358a35e42efecbacbbac1df383147a84f76
--- /dev/null
+++ b/demo/docs/zh_cn/mmdet_modelzoo.md
@@ -0,0 +1,43 @@
+## Pre-trained Detection Models
+
+### 人体 Bounding Box 检测模型
+
+MMDetection 提供了基于 COCO 的包括 `person` 在内的 80 个类别的预训练模型,用户可前往 [MMDetection Model Zoo](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html) 下载并将其用作人体 bounding box 识别模型。
+
+### 手部 Bounding Box 检测模型
+
+对于手部 bounding box 检测模型,我们提供了一个通过 MMDetection 基于 OneHand10K 数据库训练的模型。
+
+#### 基于 OneHand10K 测试集的测试结果
+
+| Arch | Box AP | ckpt | log |
+| :---------------------------------------------------------------- | :----: | :---------------------------------------------------------------: | :--------------------------------------------------------------: |
+| [Cascade_R-CNN X-101-64x4d-FPN-1class](/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py) | 0.817 | [ckpt](https://download.openmmlab.com/mmpose/mmdet_pretrained/cascade_rcnn_x101_64x4d_fpn_20e_onehand10k-dac19597_20201030.pth) | [log](https://download.openmmlab.com/mmpose/mmdet_pretrained/cascade_rcnn_x101_64x4d_fpn_20e_onehand10k_20201030.log.json) |
+| [RTMDet-nano](/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py) | 0.760 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth) | - |
+
+### 脸部 Bounding Box 检测模型
+
+对于脸部 bounding box 检测模型,我们提供了一个通过 MMDetection 基于 COCO-Face 数据库训练的 YOLOX 检测器。
+
+#### 基于 COCO-face 测试集的测试结果
+
+| Arch | Box AP | ckpt |
+| :-------------------------------------------------------------- | :----: | :----------------------------------------------------------------------------------------------------: |
+| [YOLOX-s](/demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py) | 0.408 | [ckpt](https://download.openmmlab.com/mmpose/mmdet_pretrained/yolo-x_8xb8-300e_coco-face_13274d7c.pth) |
+
+### 动物 Bounding Box 检测模型
+
+#### COCO animals
+
+COCO 数据集内包括了 10 种常见的 `animal` 类型:
+
+(14: 'bird', 15: 'cat', 16: 'dog', 17: 'horse', 18: 'sheep', 19: 'cow', 20: 'elephant', 21: 'bear', 22: 'zebra', 23: 'giraffe') 。
+
+用户如果需要使用以上类别的动物检测模型,可以前往 [MMDetection Model Zoo](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html) 下载。
+
+#### 基于 MacaquePose 测试集的测试结果
+
+| Arch | Box AP | ckpt | log |
+| :---------------------------------------------------------------- | :----: | :---------------------------------------------------------------: | :--------------------------------------------------------------: |
+| [Faster_R-CNN_Res50-FPN-1class](/demo/mmdetection_cfg/faster_rcnn_r50_fpn_1class.py) | 0.840 | [ckpt](https://download.openmmlab.com/mmpose/mmdet_pretrained/faster_rcnn_r50_fpn_1x_macaque-f64f2812_20210409.pth) | [log](https://download.openmmlab.com/mmpose/mmdet_pretrained/faster_rcnn_r50_fpn_1x_macaque_20210409.log.json) |
+| [Cascade_R-CNN X-101-64x4d-FPN-1class](/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py) | 0.879 | [ckpt](https://download.openmmlab.com/mmpose/mmdet_pretrained/cascade_rcnn_x101_64x4d_fpn_20e_macaque-e45e36f5_20210409.pth) | [log](https://download.openmmlab.com/mmpose/mmdet_pretrained/cascade_rcnn_x101_64x4d_fpn_20e_macaque_20210409.log.json) |
diff --git a/demo/docs/zh_cn/webcam_api_demo.md b/demo/docs/zh_cn/webcam_api_demo.md
new file mode 100644
index 0000000000000000000000000000000000000000..66099c9ca676dbdb1a63a3113bd2a96d8c56d435
--- /dev/null
+++ b/demo/docs/zh_cn/webcam_api_demo.md
@@ -0,0 +1,30 @@
+## 摄像头推理
+
+从版本 v1.1.0 开始,原来的摄像头 API 已被弃用。用户现在可以选择使用推理器(Inferencer)或 Demo 脚本从摄像头读取的视频中进行姿势估计。
+
+### 使用推理器进行摄像头推理
+
+用户可以通过执行以下命令来利用 MMPose Inferencer 对摄像头输入进行人体姿势估计:
+
+```shell
+python demo/inferencer_demo.py webcam --pose2d 'human'
+```
+
+有关推理器的参数详细信息,请参阅 [推理器文档](/docs/en/user_guides/inference.md)。
+
+### 使用 Demo 脚本进行摄像头推理
+
+除了 `demo/image_demo.py` 之外,所有的 Demo 脚本都支持摄像头输入。
+
+以 `demo/topdown_demo_with_mmdet.py` 为例,用户可以通过在命令中指定 **`--input webcam`** 来使用该脚本对摄像头输入进行推理:
+
+```shell
+# inference with webcam
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input webcam \
+ --show
+```
diff --git a/demo/hand3d_internet_demo.py b/demo/hand3d_internet_demo.py
new file mode 100644
index 0000000000000000000000000000000000000000..1cb10a820a46e38f01dcde3e0f36224784099d79
--- /dev/null
+++ b/demo/hand3d_internet_demo.py
@@ -0,0 +1,285 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import logging
+import mimetypes
+import os
+import time
+from argparse import ArgumentParser
+
+import cv2
+import json_tricks as json
+import mmcv
+import mmengine
+import numpy as np
+from mmengine.logging import print_log
+
+from mmpose.apis import inference_topdown, init_model
+from mmpose.registry import VISUALIZERS
+from mmpose.structures import (PoseDataSample, merge_data_samples,
+ split_instances)
+
+
+def parse_args():
+ parser = ArgumentParser()
+ parser.add_argument('config', help='Config file')
+ parser.add_argument('checkpoint', help='Checkpoint file')
+ parser.add_argument(
+ '--input', type=str, default='', help='Image/Video file')
+ parser.add_argument(
+ '--output-root',
+ type=str,
+ default='',
+ help='root of the output img file. '
+ 'Default not saving the visualization images.')
+ parser.add_argument(
+ '--save-predictions',
+ action='store_true',
+ default=False,
+ help='whether to save predicted results')
+ parser.add_argument(
+ '--disable-rebase-keypoint',
+ action='store_true',
+ default=False,
+ help='Whether to disable rebasing the predicted 3D pose so its '
+ 'lowest keypoint has a height of 0 (landing on the ground). Rebase '
+ 'is useful for visualization when the model do not predict the '
+ 'global position of the 3D pose.')
+ parser.add_argument(
+ '--show',
+ action='store_true',
+ default=False,
+ help='whether to show result')
+ parser.add_argument('--device', default='cpu', help='Device for inference')
+ parser.add_argument(
+ '--kpt-thr',
+ type=float,
+ default=0.3,
+ help='Visualizing keypoint thresholds')
+ parser.add_argument(
+ '--show-kpt-idx',
+ action='store_true',
+ default=False,
+ help='Whether to show the index of keypoints')
+ parser.add_argument(
+ '--show-interval', type=int, default=0, help='Sleep seconds per frame')
+ parser.add_argument(
+ '--radius',
+ type=int,
+ default=3,
+ help='Keypoint radius for visualization')
+ parser.add_argument(
+ '--thickness',
+ type=int,
+ default=1,
+ help='Link thickness for visualization')
+
+ args = parser.parse_args()
+ return args
+
+
+def process_one_image(args, img, model, visualizer=None, show_interval=0):
+ """Visualize predicted keypoints of one image."""
+ # inference a single image
+ pose_results = inference_topdown(model, img)
+ # post-processing
+ pose_results_2d = []
+ for idx, res in enumerate(pose_results):
+ pred_instances = res.pred_instances
+ keypoints = pred_instances.keypoints
+ rel_root_depth = pred_instances.rel_root_depth
+ scores = pred_instances.keypoint_scores
+ hand_type = pred_instances.hand_type
+
+ res_2d = PoseDataSample()
+ gt_instances = res.gt_instances.clone()
+ pred_instances = pred_instances.clone()
+ res_2d.gt_instances = gt_instances
+ res_2d.pred_instances = pred_instances
+
+ # add relative root depth to left hand joints
+ keypoints[:, 21:, 2] += rel_root_depth
+
+ # set joint scores according to hand type
+ scores[:, :21] *= hand_type[:, [0]]
+ scores[:, 21:] *= hand_type[:, [1]]
+ # normalize kpt score
+ if scores.max() > 1:
+ scores /= 255
+
+ res_2d.pred_instances.set_field(keypoints[..., :2].copy(), 'keypoints')
+
+ # rotate the keypoint to make z-axis correspondent to height
+ # for better visualization
+ vis_R = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]])
+ keypoints[..., :3] = keypoints[..., :3] @ vis_R
+
+ # rebase height (z-axis)
+ if not args.disable_rebase_keypoint:
+ valid = scores > 0
+ keypoints[..., 2] -= np.min(
+ keypoints[valid, 2], axis=-1, keepdims=True)
+
+ pose_results[idx].pred_instances.keypoints = keypoints
+ pose_results[idx].pred_instances.keypoint_scores = scores
+ pose_results_2d.append(res_2d)
+
+ data_samples = merge_data_samples(pose_results)
+ data_samples_2d = merge_data_samples(pose_results_2d)
+
+ # show the results
+ if isinstance(img, str):
+ img = mmcv.imread(img, channel_order='rgb')
+ elif isinstance(img, np.ndarray):
+ img = mmcv.bgr2rgb(img)
+
+ if visualizer is not None:
+ visualizer.add_datasample(
+ 'result',
+ img,
+ data_sample=data_samples,
+ det_data_sample=data_samples_2d,
+ draw_gt=False,
+ draw_bbox=True,
+ kpt_thr=args.kpt_thr,
+ convert_keypoint=False,
+ axis_azimuth=-115,
+ axis_limit=200,
+ axis_elev=15,
+ show_kpt_idx=args.show_kpt_idx,
+ show=args.show,
+ wait_time=show_interval)
+
+ # if there is no instance detected, return None
+ return data_samples.get('pred_instances', None)
+
+
+def main():
+ args = parse_args()
+
+ assert args.input != ''
+ assert args.show or (args.output_root != '')
+
+ output_file = None
+ if args.output_root:
+ mmengine.mkdir_or_exist(args.output_root)
+ output_file = os.path.join(args.output_root,
+ os.path.basename(args.input))
+ if args.input == 'webcam':
+ output_file += '.mp4'
+
+ if args.save_predictions:
+ assert args.output_root != ''
+ args.pred_save_path = f'{args.output_root}/results_' \
+ f'{os.path.splitext(os.path.basename(args.input))[0]}.json'
+
+ # build the model from a config file and a checkpoint file
+ model = init_model(
+ args.config, args.checkpoint, device=args.device.lower())
+
+ # init visualizer
+ model.cfg.visualizer.radius = args.radius
+ model.cfg.visualizer.line_width = args.thickness
+
+ visualizer = VISUALIZERS.build(model.cfg.visualizer)
+ visualizer.set_dataset_meta(model.dataset_meta)
+
+ if args.input == 'webcam':
+ input_type = 'webcam'
+ else:
+ input_type = mimetypes.guess_type(args.input)[0].split('/')[0]
+
+ if input_type == 'image':
+ # inference
+ pred_instances = process_one_image(args, args.input, model, visualizer)
+
+ if args.save_predictions:
+ pred_instances_list = split_instances(pred_instances)
+
+ if output_file:
+ img_vis = visualizer.get_image()
+ mmcv.imwrite(mmcv.rgb2bgr(img_vis), output_file)
+
+ elif input_type in ['webcam', 'video']:
+
+ if args.input == 'webcam':
+ cap = cv2.VideoCapture(0)
+ else:
+ cap = cv2.VideoCapture(args.input)
+
+ video_writer = None
+ pred_instances_list = []
+ frame_idx = 0
+
+ while cap.isOpened():
+ success, frame = cap.read()
+ frame_idx += 1
+
+ if not success:
+ break
+
+ # topdown pose estimation
+ pred_instances = process_one_image(args, frame, model, visualizer,
+ 0.001)
+
+ if args.save_predictions:
+ # save prediction results
+ pred_instances_list.append(
+ dict(
+ frame_id=frame_idx,
+ instances=split_instances(pred_instances)))
+
+ # output videos
+ if output_file:
+ frame_vis = visualizer.get_image()
+
+ if video_writer is None:
+ fourcc = cv2.VideoWriter_fourcc(*'mp4v')
+ # the size of the image with visualization may vary
+ # depending on the presence of heatmaps
+ video_writer = cv2.VideoWriter(
+ output_file,
+ fourcc,
+ 25, # saved fps
+ (frame_vis.shape[1], frame_vis.shape[0]))
+
+ video_writer.write(mmcv.rgb2bgr(frame_vis))
+
+ if args.show:
+ # press ESC to exit
+ if cv2.waitKey(5) & 0xFF == 27:
+ break
+
+ time.sleep(args.show_interval)
+
+ if video_writer:
+ video_writer.release()
+
+ cap.release()
+
+ else:
+ args.save_predictions = False
+ raise ValueError(
+ f'file {os.path.basename(args.input)} has invalid format.')
+
+ if args.save_predictions:
+ with open(args.pred_save_path, 'w') as f:
+ json.dump(
+ dict(
+ meta_info=model.dataset_meta,
+ instance_info=pred_instances_list),
+ f,
+ indent='\t')
+ print_log(
+ f'predictions have been saved at {args.pred_save_path}',
+ logger='current',
+ level=logging.INFO)
+
+ if output_file is not None:
+ input_type = input_type.replace('webcam', 'video')
+ print_log(
+ f'the output {input_type} has been saved at {output_file}',
+ logger='current',
+ level=logging.INFO)
+
+
+if __name__ == '__main__':
+ main()
diff --git a/demo/image_demo.py b/demo/image_demo.py
new file mode 100644
index 0000000000000000000000000000000000000000..6a408d17605fb5809968317c1357b12386f58b6f
--- /dev/null
+++ b/demo/image_demo.py
@@ -0,0 +1,113 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import logging
+from argparse import ArgumentParser
+
+from mmcv.image import imread
+from mmengine.logging import print_log
+
+from mmpose.apis import inference_topdown, init_model
+from mmpose.registry import VISUALIZERS
+from mmpose.structures import merge_data_samples
+
+
+def parse_args():
+ parser = ArgumentParser()
+ parser.add_argument('img', help='Image file')
+ parser.add_argument('config', help='Config file')
+ parser.add_argument('checkpoint', help='Checkpoint file')
+ parser.add_argument('--out-file', default=None, help='Path to output file')
+ parser.add_argument(
+ '--device', default='cuda:0', help='Device used for inference')
+ parser.add_argument(
+ '--draw-heatmap',
+ action='store_true',
+ help='Visualize the predicted heatmap')
+ parser.add_argument(
+ '--show-kpt-idx',
+ action='store_true',
+ default=False,
+ help='Whether to show the index of keypoints')
+ parser.add_argument(
+ '--skeleton-style',
+ default='mmpose',
+ type=str,
+ choices=['mmpose', 'openpose'],
+ help='Skeleton style selection')
+ parser.add_argument(
+ '--kpt-thr',
+ type=float,
+ default=0.3,
+ help='Visualizing keypoint thresholds')
+ parser.add_argument(
+ '--radius',
+ type=int,
+ default=3,
+ help='Keypoint radius for visualization')
+ parser.add_argument(
+ '--thickness',
+ type=int,
+ default=1,
+ help='Link thickness for visualization')
+ parser.add_argument(
+ '--alpha', type=float, default=0.8, help='The transparency of bboxes')
+ parser.add_argument(
+ '--show',
+ action='store_true',
+ default=False,
+ help='whether to show img')
+ args = parser.parse_args()
+ return args
+
+
+def main():
+ args = parse_args()
+
+ # build the model from a config file and a checkpoint file
+ if args.draw_heatmap:
+ cfg_options = dict(model=dict(test_cfg=dict(output_heatmaps=True)))
+ else:
+ cfg_options = None
+
+ model = init_model(
+ args.config,
+ args.checkpoint,
+ device=args.device,
+ cfg_options=cfg_options)
+
+ # init visualizer
+ model.cfg.visualizer.radius = args.radius
+ model.cfg.visualizer.alpha = args.alpha
+ model.cfg.visualizer.line_width = args.thickness
+
+ visualizer = VISUALIZERS.build(model.cfg.visualizer)
+ visualizer.set_dataset_meta(
+ model.dataset_meta, skeleton_style=args.skeleton_style)
+
+ # inference a single image
+ batch_results = inference_topdown(model, args.img)
+ results = merge_data_samples(batch_results)
+
+ # show the results
+ img = imread(args.img, channel_order='rgb')
+ visualizer.add_datasample(
+ 'result',
+ img,
+ data_sample=results,
+ draw_gt=False,
+ draw_bbox=True,
+ kpt_thr=args.kpt_thr,
+ draw_heatmap=args.draw_heatmap,
+ show_kpt_idx=args.show_kpt_idx,
+ skeleton_style=args.skeleton_style,
+ show=args.show,
+ out_file=args.out_file)
+
+ if args.out_file is not None:
+ print_log(
+ f'the output image has been saved at {args.out_file}',
+ logger='current',
+ level=logging.INFO)
+
+
+if __name__ == '__main__':
+ main()
diff --git a/demo/inferencer_demo.py b/demo/inferencer_demo.py
new file mode 100644
index 0000000000000000000000000000000000000000..d20c433f4e0f3dac55b2ce2d5f54fea058392407
--- /dev/null
+++ b/demo/inferencer_demo.py
@@ -0,0 +1,222 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+from argparse import ArgumentParser
+from typing import Dict
+
+from mmpose.apis.inferencers import MMPoseInferencer, get_model_aliases
+
+filter_args = dict(bbox_thr=0.3, nms_thr=0.3, pose_based_nms=False)
+POSE2D_SPECIFIC_ARGS = dict(
+ yoloxpose=dict(bbox_thr=0.01, nms_thr=0.65, pose_based_nms=True),
+ rtmo=dict(bbox_thr=0.1, nms_thr=0.65, pose_based_nms=True),
+)
+
+
+def parse_args():
+ parser = ArgumentParser()
+ parser.add_argument(
+ 'inputs',
+ type=str,
+ nargs='?',
+ help='Input image/video path or folder path.')
+
+ # init args
+ parser.add_argument(
+ '--pose2d',
+ type=str,
+ default=None,
+ help='Pretrained 2D pose estimation algorithm. It\'s the path to the '
+ 'config file or the model name defined in metafile.')
+ parser.add_argument(
+ '--pose2d-weights',
+ type=str,
+ default=None,
+ help='Path to the custom checkpoint file of the selected pose model. '
+ 'If it is not specified and "pose2d" is a model name of metafile, '
+ 'the weights will be loaded from metafile.')
+ parser.add_argument(
+ '--pose3d',
+ type=str,
+ default=None,
+ help='Pretrained 3D pose estimation algorithm. It\'s the path to the '
+ 'config file or the model name defined in metafile.')
+ parser.add_argument(
+ '--pose3d-weights',
+ type=str,
+ default=None,
+ help='Path to the custom checkpoint file of the selected pose model. '
+ 'If it is not specified and "pose3d" is a model name of metafile, '
+ 'the weights will be loaded from metafile.')
+ parser.add_argument(
+ '--det-model',
+ type=str,
+ default=None,
+ help='Config path or alias of detection model.')
+ parser.add_argument(
+ '--det-weights',
+ type=str,
+ default=None,
+ help='Path to the checkpoints of detection model.')
+ parser.add_argument(
+ '--det-cat-ids',
+ type=int,
+ nargs='+',
+ default=0,
+ help='Category id for detection model.')
+ parser.add_argument(
+ '--scope',
+ type=str,
+ default='mmpose',
+ help='Scope where modules are defined.')
+ parser.add_argument(
+ '--device',
+ type=str,
+ default=None,
+ help='Device used for inference. '
+ 'If not specified, the available device will be automatically used.')
+ parser.add_argument(
+ '--show-progress',
+ action='store_true',
+ help='Display the progress bar during inference.')
+
+ # The default arguments for prediction filtering differ for top-down
+ # and bottom-up models. We assign the default arguments according to the
+ # selected pose2d model
+ args, _ = parser.parse_known_args()
+ for model in POSE2D_SPECIFIC_ARGS:
+ if model in args.pose2d:
+ filter_args.update(POSE2D_SPECIFIC_ARGS[model])
+ break
+
+ # call args
+ parser.add_argument(
+ '--show',
+ action='store_true',
+ help='Display the image/video in a popup window.')
+ parser.add_argument(
+ '--draw-bbox',
+ action='store_true',
+ help='Whether to draw the bounding boxes.')
+ parser.add_argument(
+ '--draw-heatmap',
+ action='store_true',
+ default=False,
+ help='Whether to draw the predicted heatmaps.')
+ parser.add_argument(
+ '--bbox-thr',
+ type=float,
+ default=filter_args['bbox_thr'],
+ help='Bounding box score threshold')
+ parser.add_argument(
+ '--nms-thr',
+ type=float,
+ default=filter_args['nms_thr'],
+ help='IoU threshold for bounding box NMS')
+ parser.add_argument(
+ '--pose-based-nms',
+ type=lambda arg: arg.lower() in ('true', 'yes', 't', 'y', '1'),
+ default=filter_args['pose_based_nms'],
+ help='Whether to use pose-based NMS')
+ parser.add_argument(
+ '--kpt-thr', type=float, default=0.3, help='Keypoint score threshold')
+ parser.add_argument(
+ '--tracking-thr', type=float, default=0.3, help='Tracking threshold')
+ parser.add_argument(
+ '--use-oks-tracking',
+ action='store_true',
+ help='Whether to use OKS as similarity in tracking')
+ parser.add_argument(
+ '--disable-norm-pose-2d',
+ action='store_true',
+ help='Whether to scale the bbox (along with the 2D pose) to the '
+ 'average bbox scale of the dataset, and move the bbox (along with the '
+ '2D pose) to the average bbox center of the dataset. This is useful '
+ 'when bbox is small, especially in multi-person scenarios.')
+ parser.add_argument(
+ '--disable-rebase-keypoint',
+ action='store_true',
+ default=False,
+ help='Whether to disable rebasing the predicted 3D pose so its '
+ 'lowest keypoint has a height of 0 (landing on the ground). Rebase '
+ 'is useful for visualization when the model do not predict the '
+ 'global position of the 3D pose.')
+ parser.add_argument(
+ '--num-instances',
+ type=int,
+ default=1,
+ help='The number of 3D poses to be visualized in every frame. If '
+ 'less than 0, it will be set to the number of pose results in the '
+ 'first frame.')
+ parser.add_argument(
+ '--radius',
+ type=int,
+ default=3,
+ help='Keypoint radius for visualization.')
+ parser.add_argument(
+ '--thickness',
+ type=int,
+ default=1,
+ help='Link thickness for visualization.')
+ parser.add_argument(
+ '--skeleton-style',
+ default='mmpose',
+ type=str,
+ choices=['mmpose', 'openpose'],
+ help='Skeleton style selection')
+ parser.add_argument(
+ '--black-background',
+ action='store_true',
+ help='Plot predictions on a black image')
+ parser.add_argument(
+ '--vis-out-dir',
+ type=str,
+ default='',
+ help='Directory for saving visualized results.')
+ parser.add_argument(
+ '--pred-out-dir',
+ type=str,
+ default='',
+ help='Directory for saving inference results.')
+ parser.add_argument(
+ '--show-alias',
+ action='store_true',
+ help='Display all the available model aliases.')
+
+ call_args = vars(parser.parse_args())
+
+ init_kws = [
+ 'pose2d', 'pose2d_weights', 'scope', 'device', 'det_model',
+ 'det_weights', 'det_cat_ids', 'pose3d', 'pose3d_weights',
+ 'show_progress'
+ ]
+ init_args = {}
+ for init_kw in init_kws:
+ init_args[init_kw] = call_args.pop(init_kw)
+
+ display_alias = call_args.pop('show_alias')
+
+ return init_args, call_args, display_alias
+
+
+def display_model_aliases(model_aliases: Dict[str, str]) -> None:
+ """Display the available model aliases and their corresponding model
+ names."""
+ aliases = list(model_aliases.keys())
+ max_alias_length = max(map(len, aliases))
+ print(f'{"ALIAS".ljust(max_alias_length+2)}MODEL_NAME')
+ for alias in sorted(aliases):
+ print(f'{alias.ljust(max_alias_length+2)}{model_aliases[alias]}')
+
+
+def main():
+ init_args, call_args, display_alias = parse_args()
+ if display_alias:
+ model_alises = get_model_aliases(init_args['scope'])
+ display_model_aliases(model_alises)
+ else:
+ inferencer = MMPoseInferencer(**init_args)
+ for _ in inferencer(**call_args):
+ pass
+
+
+if __name__ == '__main__':
+ main()
diff --git a/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py b/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py
new file mode 100644
index 0000000000000000000000000000000000000000..0ccb78cfcab59b58839f8165dbf157b4d34721d2
--- /dev/null
+++ b/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py
@@ -0,0 +1,270 @@
+# runtime settings
+default_scope = 'mmdet'
+
+default_hooks = dict(
+ timer=dict(type='IterTimerHook'),
+ logger=dict(type='LoggerHook', interval=50),
+ param_scheduler=dict(type='ParamSchedulerHook'),
+ checkpoint=dict(type='CheckpointHook', interval=1),
+ sampler_seed=dict(type='DistSamplerSeedHook'),
+ visualization=dict(type='DetVisualizationHook'))
+
+env_cfg = dict(
+ cudnn_benchmark=False,
+ mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0),
+ dist_cfg=dict(backend='nccl'),
+)
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='DetLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=True)
+
+log_level = 'INFO'
+load_from = None
+resume = False
+
+# model settings
+model = dict(
+ type='CascadeRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='CascadeRoIHead',
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ]),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.6,
+ neg_iou_thr=0.6,
+ min_pos_iou=0.6,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.7,
+ min_pos_iou=0.7,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)
+ ]),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
+
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ format_only=False)
+test_evaluator = val_evaluator
diff --git a/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_coco.py b/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f91bd0d105b9394c514ffb82d54117dba347680a
--- /dev/null
+++ b/demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_coco.py
@@ -0,0 +1,256 @@
+checkpoint_config = dict(interval=1)
+# yapf:disable
+log_config = dict(
+ interval=50,
+ hooks=[
+ dict(type='TextLoggerHook'),
+ # dict(type='TensorboardLoggerHook')
+ ])
+# yapf:enable
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
+
+# optimizer
+optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
+optimizer_config = dict(grad_clip=None)
+# learning policy
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=500,
+ warmup_ratio=0.001,
+ step=[16, 19])
+total_epochs = 20
+
+# model settings
+model = dict(
+ type='CascadeRCNN',
+ pretrained='open-mmlab://resnext101_64x4d',
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='CascadeRoIHead',
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ]),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.6,
+ neg_iou_thr=0.6,
+ min_pos_iou=0.6,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.7,
+ min_pos_iou=0.7,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)
+ ]),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
+
+dataset_type = 'CocoDataset'
+data_root = 'data/coco'
+img_norm_cfg = dict(
+ mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']),
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img']),
+ ])
+]
+data = dict(
+ samples_per_gpu=2,
+ workers_per_gpu=2,
+ train=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_train2017.json',
+ img_prefix=f'{data_root}/train2017/',
+ pipeline=train_pipeline),
+ val=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline),
+ test=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline))
+evaluation = dict(interval=1, metric='bbox')
diff --git a/demo/mmdetection_cfg/faster_rcnn_r50_fpn_1class.py b/demo/mmdetection_cfg/faster_rcnn_r50_fpn_1class.py
new file mode 100644
index 0000000000000000000000000000000000000000..ee54f5b66bd216c485db0a56a68bf2793428d123
--- /dev/null
+++ b/demo/mmdetection_cfg/faster_rcnn_r50_fpn_1class.py
@@ -0,0 +1,182 @@
+checkpoint_config = dict(interval=1)
+# yapf:disable
+log_config = dict(
+ interval=50,
+ hooks=[
+ dict(type='TextLoggerHook'),
+ # dict(type='TensorboardLoggerHook')
+ ])
+# yapf:enable
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
+# optimizer
+optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
+optimizer_config = dict(grad_clip=None)
+# learning policy
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=500,
+ warmup_ratio=0.001,
+ step=[8, 11])
+total_epochs = 12
+
+model = dict(
+ type='FasterRCNN',
+ pretrained='torchvision://resnet50',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)
+ # soft-nms is also supported for rcnn testing
+ # e.g., nms=dict(type='soft_nms', iou_threshold=0.5, min_score=0.05)
+ ))
+
+dataset_type = 'CocoDataset'
+data_root = 'data/coco'
+img_norm_cfg = dict(
+ mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']),
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img']),
+ ])
+]
+data = dict(
+ samples_per_gpu=2,
+ workers_per_gpu=2,
+ train=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_train2017.json',
+ img_prefix=f'{data_root}/train2017/',
+ pipeline=train_pipeline),
+ val=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline),
+ test=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline))
+evaluation = dict(interval=1, metric='bbox')
diff --git a/demo/mmdetection_cfg/faster_rcnn_r50_fpn_coco.py b/demo/mmdetection_cfg/faster_rcnn_r50_fpn_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5bceed65ba1359995caf82f614d6d1a7b86da460
--- /dev/null
+++ b/demo/mmdetection_cfg/faster_rcnn_r50_fpn_coco.py
@@ -0,0 +1,196 @@
+# runtime settings
+default_scope = 'mmdet'
+
+default_hooks = dict(
+ timer=dict(type='IterTimerHook'),
+ logger=dict(type='LoggerHook', interval=50),
+ param_scheduler=dict(type='ParamSchedulerHook'),
+ checkpoint=dict(type='CheckpointHook', interval=1),
+ sampler_seed=dict(type='DistSamplerSeedHook'),
+ visualization=dict(type='DetVisualizationHook'))
+
+env_cfg = dict(
+ cudnn_benchmark=False,
+ mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0),
+ dist_cfg=dict(backend='nccl'),
+)
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='DetLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=True)
+
+log_level = 'INFO'
+load_from = None
+resume = False
+
+# model settings
+model = dict(
+ type='FasterRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)
+ # soft-nms is also supported for rcnn testing
+ # e.g., nms=dict(type='soft_nms', iou_threshold=0.5, min_score=0.05)
+ ))
+
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ format_only=False)
+test_evaluator = val_evaluator
diff --git a/demo/mmdetection_cfg/mask_rcnn_r50_fpn_2x_coco.py b/demo/mmdetection_cfg/mask_rcnn_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..05d39fa9a87a0200f9b9d29cd19acd28c155d126
--- /dev/null
+++ b/demo/mmdetection_cfg/mask_rcnn_r50_fpn_2x_coco.py
@@ -0,0 +1,242 @@
+model = dict(
+ type='MaskRCNN',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_head=dict(
+ type='FCNMaskHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100,
+ mask_thr_binary=0.5)))
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+img_norm_cfg = dict(
+ mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels', 'gt_masks'])
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='Collect', keys=['img'])
+ ])
+]
+data = dict(
+ samples_per_gpu=2,
+ workers_per_gpu=2,
+ train=dict(
+ type='CocoDataset',
+ ann_file='data/coco/annotations/instances_train2017.json',
+ img_prefix='data/coco/train2017/',
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(
+ type='Collect',
+ keys=['img', 'gt_bboxes', 'gt_labels', 'gt_masks'])
+ ]),
+ val=dict(
+ type='CocoDataset',
+ ann_file='data/coco/annotations/instances_val2017.json',
+ img_prefix='data/coco/val2017/',
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='Collect', keys=['img'])
+ ])
+ ]),
+ test=dict(
+ type='CocoDataset',
+ ann_file='data/coco/annotations/instances_val2017.json',
+ img_prefix='data/coco/val2017/',
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='Collect', keys=['img'])
+ ])
+ ]))
+evaluation = dict(metric=['bbox', 'segm'])
+optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
+optimizer_config = dict(grad_clip=None)
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=500,
+ warmup_ratio=0.001,
+ step=[16, 22])
+runner = dict(type='EpochBasedRunner', max_epochs=24)
+checkpoint_config = dict(interval=1)
+log_config = dict(interval=50, hooks=[dict(type='TextLoggerHook')])
+custom_hooks = [dict(type='NumClassCheckHook')]
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
diff --git a/demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py b/demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py
new file mode 100644
index 0000000000000000000000000000000000000000..620de8dc8f038f7267bc566e04afd8b647ba75da
--- /dev/null
+++ b/demo/mmdetection_cfg/rtmdet_m_640-8xb32_coco-person.py
@@ -0,0 +1,20 @@
+_base_ = 'mmdet::rtmdet/rtmdet_m_8xb32-300e_coco.py'
+
+checkpoint = 'https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth' # noqa
+
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone.', checkpoint=checkpoint)),
+ bbox_head=dict(num_classes=1),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+train_dataloader = dict(dataset=dict(metainfo=dict(classes=('person', ))))
+
+val_dataloader = dict(dataset=dict(metainfo=dict(classes=('person', ))))
+test_dataloader = val_dataloader
diff --git a/demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py b/demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6d0d3dfef15f96f7c0ea188998c304031fa8c828
--- /dev/null
+++ b/demo/mmdetection_cfg/rtmdet_m_8xb32-300e_coco.py
@@ -0,0 +1 @@
+_base_ = 'mmdet::rtmdet/rtmdet_m_8xb32-300e_coco.py'
diff --git a/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_coco-person.py b/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_coco-person.py
new file mode 100644
index 0000000000000000000000000000000000000000..c2f1b64e4acb31ec24396c8421492d7d2fdd7aab
--- /dev/null
+++ b/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_coco-person.py
@@ -0,0 +1,104 @@
+_base_ = 'mmdet::rtmdet/rtmdet_l_8xb32-300e_coco.py'
+
+input_shape = 320
+
+model = dict(
+ backbone=dict(
+ deepen_factor=0.33,
+ widen_factor=0.25,
+ use_depthwise=True,
+ ),
+ neck=dict(
+ in_channels=[64, 128, 256],
+ out_channels=64,
+ num_csp_blocks=1,
+ use_depthwise=True,
+ ),
+ bbox_head=dict(
+ in_channels=64,
+ feat_channels=64,
+ share_conv=False,
+ exp_on_reg=False,
+ use_depthwise=True,
+ num_classes=1),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='CachedMosaic',
+ img_scale=(input_shape, input_shape),
+ pad_val=114.0,
+ max_cached_images=20,
+ random_pop=False),
+ dict(
+ type='RandomResize',
+ scale=(input_shape * 2, input_shape * 2),
+ ratio_range=(0.5, 1.5),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=(input_shape, input_shape)),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(type='PackDetInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=(input_shape, input_shape),
+ ratio_range=(0.5, 1.5),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=(input_shape, input_shape)),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_shape, input_shape), keep_ratio=True),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ dataset=dict(pipeline=train_pipeline, metainfo=dict(classes=('person', ))))
+
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, metainfo=dict(classes=('person', ))))
+test_dataloader = val_dataloader
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='PipelineSwitchHook',
+ switch_epoch=280,
+ switch_pipeline=train_pipeline_stage2)
+]
diff --git a/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py b/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py
new file mode 100644
index 0000000000000000000000000000000000000000..278cc0bfe82670f89a566dc7e79b362b5a23a3d9
--- /dev/null
+++ b/demo/mmdetection_cfg/rtmdet_nano_320-8xb32_hand.py
@@ -0,0 +1,171 @@
+_base_ = 'mmdet::rtmdet/rtmdet_l_8xb32-300e_coco.py'
+
+input_shape = 320
+
+model = dict(
+ backbone=dict(
+ deepen_factor=0.33,
+ widen_factor=0.25,
+ use_depthwise=True,
+ ),
+ neck=dict(
+ in_channels=[64, 128, 256],
+ out_channels=64,
+ num_csp_blocks=1,
+ use_depthwise=True,
+ ),
+ bbox_head=dict(
+ in_channels=64,
+ feat_channels=64,
+ share_conv=False,
+ exp_on_reg=False,
+ use_depthwise=True,
+ num_classes=1),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# file_client_args = dict(
+# backend='petrel',
+# path_mapping=dict({'data/': 's3://openmmlab/datasets/'}))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='CachedMosaic',
+ img_scale=(input_shape, input_shape),
+ pad_val=114.0,
+ max_cached_images=20,
+ random_pop=False),
+ dict(
+ type='RandomResize',
+ scale=(input_shape * 2, input_shape * 2),
+ ratio_range=(0.5, 1.5),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=(input_shape, input_shape)),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(type='PackDetInputs')
+]
+
+train_pipeline_stage2 = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=(input_shape, input_shape),
+ ratio_range=(0.5, 1.5),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=(input_shape, input_shape)),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_shape, input_shape), keep_ratio=True),
+ dict(
+ type='Pad',
+ size=(input_shape, input_shape),
+ pad_val=dict(img=(114, 114, 114))),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+data_mode = 'topdown'
+data_root = 'data/'
+
+train_dataset = dict(
+ _delete_=True,
+ type='ConcatDataset',
+ datasets=[
+ dict(
+ type='mmpose.OneHand10KDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ pipeline=train_pipeline,
+ ann_file='onehand10k/annotations/onehand10k_train.json',
+ data_prefix=dict(img='pose/OneHand10K/')),
+ dict(
+ type='mmpose.FreiHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ pipeline=train_pipeline,
+ ann_file='freihand/annotations/freihand_train.json',
+ data_prefix=dict(img='pose/FreiHand/')),
+ dict(
+ type='mmpose.Rhd2DDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ pipeline=train_pipeline,
+ ann_file='rhd/annotations/rhd_train.json',
+ data_prefix=dict(img='pose/RHD/')),
+ dict(
+ type='mmpose.HalpeHandDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ pipeline=train_pipeline,
+ ann_file='halpe/annotations/halpe_train_v1.json',
+ data_prefix=dict(
+ img='pose/Halpe/hico_20160224_det/images/train2015/') # noqa
+ )
+ ],
+ ignore_keys=[
+ 'CLASSES', 'dataset_keypoint_weights', 'dataset_name', 'flip_indices',
+ 'flip_pairs', 'keypoint_colors', 'keypoint_id2name',
+ 'keypoint_name2id', 'lower_body_ids', 'num_keypoints',
+ 'num_skeleton_links', 'sigmas', 'skeleton_link_colors',
+ 'skeleton_links', 'upper_body_ids'
+ ],
+)
+
+test_dataset = dict(
+ _delete_=True,
+ type='mmpose.OneHand10KDataset',
+ data_root=data_root,
+ data_mode=data_mode,
+ pipeline=test_pipeline,
+ ann_file='onehand10k/annotations/onehand10k_test.json',
+ data_prefix=dict(img='pose/OneHand10K/'),
+)
+
+train_dataloader = dict(dataset=train_dataset)
+val_dataloader = dict(dataset=test_dataset)
+test_dataloader = val_dataloader
+
+custom_hooks = [
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0002,
+ update_buffers=True,
+ priority=49),
+ dict(
+ type='PipelineSwitchHook',
+ switch_epoch=280,
+ switch_pipeline=train_pipeline_stage2)
+]
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'onehand10k/annotations/onehand10k_test.json',
+ metric='bbox',
+ format_only=False)
+test_evaluator = val_evaluator
+
+train_cfg = dict(val_interval=1)
diff --git a/demo/mmdetection_cfg/rtmdet_tiny_8xb32-300e_coco.py b/demo/mmdetection_cfg/rtmdet_tiny_8xb32-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..db26ca83388163047fcd45bcaede7d839bdb58f8
--- /dev/null
+++ b/demo/mmdetection_cfg/rtmdet_tiny_8xb32-300e_coco.py
@@ -0,0 +1 @@
+_base_ = 'mmdet::rtmdet/rtmdet_tiny_8xb32-300e_coco.py'
diff --git a/demo/mmdetection_cfg/ssdlite_mobilenetv2-scratch_8xb24-600e_coco.py b/demo/mmdetection_cfg/ssdlite_mobilenetv2-scratch_8xb24-600e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..05c6e9659c7d80eea468624247b8f98d7ad5b428
--- /dev/null
+++ b/demo/mmdetection_cfg/ssdlite_mobilenetv2-scratch_8xb24-600e_coco.py
@@ -0,0 +1,136 @@
+# model settings
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1)
+model = dict(
+ type='SingleStageDetector',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='MobileNetV2',
+ out_indices=(4, 7),
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ init_cfg=dict(type='TruncNormal', layer='Conv2d', std=0.03)),
+ neck=dict(
+ type='SSDNeck',
+ in_channels=(96, 1280),
+ out_channels=(96, 1280, 512, 256, 256, 128),
+ level_strides=(2, 2, 2, 2),
+ level_paddings=(1, 1, 1, 1),
+ l2_norm_scale=None,
+ use_depthwise=True,
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ act_cfg=dict(type='ReLU6'),
+ init_cfg=dict(type='TruncNormal', layer='Conv2d', std=0.03)),
+ bbox_head=dict(
+ type='SSDHead',
+ in_channels=(96, 1280, 512, 256, 256, 128),
+ num_classes=80,
+ use_depthwise=True,
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ act_cfg=dict(type='ReLU6'),
+ init_cfg=dict(type='Normal', layer='Conv2d', std=0.001),
+
+ # set anchor size manually instead of using the predefined
+ # SSD300 setting.
+ anchor_generator=dict(
+ type='SSDAnchorGenerator',
+ scale_major=False,
+ strides=[16, 32, 64, 107, 160, 320],
+ ratios=[[2, 3], [2, 3], [2, 3], [2, 3], [2, 3], [2, 3]],
+ min_sizes=[48, 100, 150, 202, 253, 304],
+ max_sizes=[100, 150, 202, 253, 304, 320]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2])),
+ # model training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.,
+ ignore_iof_thr=-1,
+ gt_max_assign_all=False),
+ sampler=dict(type='PseudoSampler'),
+ smoothl1_beta=1.,
+ allowed_border=-1,
+ pos_weight=-1,
+ neg_pos_ratio=3,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ nms=dict(type='nms', iou_threshold=0.45),
+ min_bbox_size=0,
+ score_thr=0.02,
+ max_per_img=200))
+env_cfg = dict(cudnn_benchmark=True)
+
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+input_size = 320
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='Expand',
+ mean=data_preprocessor['mean'],
+ to_rgb=data_preprocessor['bgr_to_rgb'],
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=24,
+ num_workers=4,
+ batch_sampler=None,
+ dataset=dict(
+ _delete_=True,
+ type='RepeatDataset',
+ times=5,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline)))
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/demo/mmdetection_cfg/ssdlite_mobilenetv2_scratch_600e_onehand.py b/demo/mmdetection_cfg/ssdlite_mobilenetv2_scratch_600e_onehand.py
new file mode 100644
index 0000000000000000000000000000000000000000..ebdd2e719cb29263f0902ad627fc5742a92fca72
--- /dev/null
+++ b/demo/mmdetection_cfg/ssdlite_mobilenetv2_scratch_600e_onehand.py
@@ -0,0 +1,153 @@
+# =========================================================
+# from 'mmdetection/configs/_base_/default_runtime.py'
+# =========================================================
+default_scope = 'mmdet'
+checkpoint_config = dict(interval=1)
+# yapf:disable
+log_config = dict(
+ interval=50,
+ hooks=[
+ dict(type='TextLoggerHook'),
+ # dict(type='TensorboardLoggerHook')
+ ])
+# yapf:enable
+custom_hooks = [dict(type='NumClassCheckHook')]
+# =========================================================
+
+# model settings
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1)
+model = dict(
+ type='SingleStageDetector',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='MobileNetV2',
+ out_indices=(4, 7),
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ init_cfg=dict(type='TruncNormal', layer='Conv2d', std=0.03)),
+ neck=dict(
+ type='SSDNeck',
+ in_channels=(96, 1280),
+ out_channels=(96, 1280, 512, 256, 256, 128),
+ level_strides=(2, 2, 2, 2),
+ level_paddings=(1, 1, 1, 1),
+ l2_norm_scale=None,
+ use_depthwise=True,
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ act_cfg=dict(type='ReLU6'),
+ init_cfg=dict(type='TruncNormal', layer='Conv2d', std=0.03)),
+ bbox_head=dict(
+ type='SSDHead',
+ in_channels=(96, 1280, 512, 256, 256, 128),
+ num_classes=1,
+ use_depthwise=True,
+ norm_cfg=dict(type='BN', eps=0.001, momentum=0.03),
+ act_cfg=dict(type='ReLU6'),
+ init_cfg=dict(type='Normal', layer='Conv2d', std=0.001),
+
+ # set anchor size manually instead of using the predefined
+ # SSD300 setting.
+ anchor_generator=dict(
+ type='SSDAnchorGenerator',
+ scale_major=False,
+ strides=[16, 32, 64, 107, 160, 320],
+ ratios=[[2, 3], [2, 3], [2, 3], [2, 3], [2, 3], [2, 3]],
+ min_sizes=[48, 100, 150, 202, 253, 304],
+ max_sizes=[100, 150, 202, 253, 304, 320]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2])),
+ # model training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.,
+ ignore_iof_thr=-1,
+ gt_max_assign_all=False),
+ sampler=dict(type='PseudoSampler'),
+ smoothl1_beta=1.,
+ allowed_border=-1,
+ pos_weight=-1,
+ neg_pos_ratio=3,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ nms=dict(type='nms', iou_threshold=0.45),
+ min_bbox_size=0,
+ score_thr=0.02,
+ max_per_img=200))
+cudnn_benchmark = True
+
+# dataset settings
+file_client_args = dict(backend='disk')
+
+dataset_type = 'CocoDataset'
+data_root = 'data/onehand10k/'
+classes = ('hand', )
+input_size = 320
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/onehand10k_test.json',
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# optimizer
+optimizer = dict(type='SGD', lr=0.015, momentum=0.9, weight_decay=4.0e-5)
+optimizer_config = dict(grad_clip=None)
+
+# learning policy
+lr_config = dict(
+ policy='CosineAnnealing',
+ warmup='linear',
+ warmup_iters=500,
+ warmup_ratio=0.001,
+ min_lr=0)
+runner = dict(type='EpochBasedRunner', max_epochs=120)
+
+# Avoid evaluation and saving weights too frequently
+evaluation = dict(interval=5, metric='bbox')
+checkpoint_config = dict(interval=5)
+custom_hooks = [
+ dict(type='NumClassCheckHook'),
+ dict(type='CheckInvalidLossHook', interval=50, priority='VERY_LOW')
+]
+
+log_config = dict(interval=5)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (24 samples per GPU)
+auto_scale_lr = dict(base_batch_size=192)
+
+load_from = 'https://download.openmmlab.com/mmdetection/'
+'v2.0/ssd/ssdlite_mobilenetv2_scratch_600e_coco/'
+'ssdlite_mobilenetv2_scratch_600e_coco_20210629_110627-974d9307.pth'
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='DetLocalVisualizer', vis_backends=vis_backends, name='visualizer')
diff --git a/demo/mmdetection_cfg/yolov3_d53_320_273e_coco.py b/demo/mmdetection_cfg/yolov3_d53_320_273e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d7e9cca1eb34f9935a9eaf74b4cae18d1efaa248
--- /dev/null
+++ b/demo/mmdetection_cfg/yolov3_d53_320_273e_coco.py
@@ -0,0 +1,140 @@
+# model settings
+model = dict(
+ type='YOLOV3',
+ pretrained='open-mmlab://darknet53',
+ backbone=dict(type='Darknet', depth=53, out_indices=(3, 4, 5)),
+ neck=dict(
+ type='YOLOV3Neck',
+ num_scales=3,
+ in_channels=[1024, 512, 256],
+ out_channels=[512, 256, 128]),
+ bbox_head=dict(
+ type='YOLOV3Head',
+ num_classes=80,
+ in_channels=[512, 256, 128],
+ out_channels=[1024, 512, 256],
+ anchor_generator=dict(
+ type='YOLOAnchorGenerator',
+ base_sizes=[[(116, 90), (156, 198), (373, 326)],
+ [(30, 61), (62, 45), (59, 119)],
+ [(10, 13), (16, 30), (33, 23)]],
+ strides=[32, 16, 8]),
+ bbox_coder=dict(type='YOLOBBoxCoder'),
+ featmap_strides=[32, 16, 8],
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_conf=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_xy=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=2.0,
+ reduction='sum'),
+ loss_wh=dict(type='MSELoss', loss_weight=2.0, reduction='sum')),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='GridAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0)),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ conf_thr=0.005,
+ nms=dict(type='nms', iou_threshold=0.45),
+ max_per_img=100))
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco'
+img_norm_cfg = dict(mean=[0, 0, 0], std=[255., 255., 255.], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadImageFromFile', to_float32=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='PhotoMetricDistortion'),
+ dict(
+ type='Expand',
+ mean=img_norm_cfg['mean'],
+ to_rgb=img_norm_cfg['to_rgb'],
+ ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', img_scale=(320, 320), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels'])
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(320, 320),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img'])
+ ])
+]
+data = dict(
+ samples_per_gpu=8,
+ workers_per_gpu=4,
+ train=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_train2017.json',
+ img_prefix=f'{data_root}/train2017/',
+ pipeline=train_pipeline),
+ val=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline),
+ test=dict(
+ type=dataset_type,
+ ann_file=f'{data_root}/annotations/instances_val2017.json',
+ img_prefix=f'{data_root}/val2017/',
+ pipeline=test_pipeline))
+# optimizer
+optimizer = dict(type='SGD', lr=0.001, momentum=0.9, weight_decay=0.0005)
+optimizer_config = dict(grad_clip=dict(max_norm=35, norm_type=2))
+# learning policy
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=2000, # same as burn-in in darknet
+ warmup_ratio=0.1,
+ step=[218, 246])
+# runtime settings
+runner = dict(type='EpochBasedRunner', max_epochs=273)
+evaluation = dict(interval=1, metric=['bbox'])
+
+checkpoint_config = dict(interval=1)
+# yapf:disable
+log_config = dict(
+ interval=50,
+ hooks=[
+ dict(type='TextLoggerHook'),
+ # dict(type='TensorboardLoggerHook')
+ ])
+# yapf:enable
+custom_hooks = [dict(type='NumClassCheckHook')]
+
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
diff --git a/demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py b/demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py
new file mode 100644
index 0000000000000000000000000000000000000000..16f891304ac8d6242a3e054fb18c60a9cb4a237c
--- /dev/null
+++ b/demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py
@@ -0,0 +1,300 @@
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=300, val_interval=10)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+param_scheduler = [
+ dict(
+ type='mmdet.QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ type='CosineAnnealingLR',
+ eta_min=0.0005,
+ begin=5,
+ T_max=285,
+ end=285,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(type='ConstantLR', by_epoch=True, factor=1, begin=285, end=300)
+]
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0005, nesterov=True),
+ paramwise_cfg=dict(norm_decay_mult=0.0, bias_decay_mult=0.0))
+auto_scale_lr = dict(enable=False, base_batch_size=64)
+default_scope = 'mmdet'
+default_hooks = dict(
+ timer=dict(type='IterTimerHook'),
+ logger=dict(type='LoggerHook', interval=50),
+ param_scheduler=dict(type='ParamSchedulerHook'),
+ checkpoint=dict(type='CheckpointHook', interval=10, max_keep_ckpts=3),
+ sampler_seed=dict(type='DistSamplerSeedHook'),
+ visualization=dict(type='DetVisualizationHook'))
+env_cfg = dict(
+ cudnn_benchmark=False,
+ mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0),
+ dist_cfg=dict(backend='nccl'))
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='DetLocalVisualizer',
+ vis_backends=[dict(type='LocalVisBackend')],
+ name='visualizer')
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=True)
+log_level = 'INFO'
+load_from = 'https://download.openmmlab.com/mmdetection/' \
+ 'v2.0/yolox/yolox_s_8x8_300e_coco/' \
+ 'yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth'
+resume = False
+img_scale = (640, 640)
+model = dict(
+ type='YOLOX',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ pad_size_divisor=32,
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=10)
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(2, 3, 4),
+ use_depthwise=False,
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ neck=dict(
+ type='YOLOXPAFPN',
+ in_channels=[128, 256, 512],
+ out_channels=128,
+ num_csp_blocks=1,
+ use_depthwise=False,
+ upsample_cfg=dict(scale_factor=2, mode='nearest'),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ bbox_head=dict(
+ type='YOLOXHead',
+ num_classes=1,
+ in_channels=128,
+ feat_channels=128,
+ stacked_convs=2,
+ strides=(8, 16, 32),
+ use_depthwise=False,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='sum',
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_obj=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='sum',
+ loss_weight=1.0),
+ loss_l1=dict(type='L1Loss', reduction='sum', loss_weight=1.0)),
+ train_cfg=dict(assigner=dict(type='SimOTAAssigner', center_radius=2.5)),
+ test_cfg=dict(score_thr=0.01, nms=dict(type='nms', iou_threshold=0.65)))
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+backend_args = dict(backend='local')
+train_pipeline = [
+ dict(type='Mosaic', img_scale=(640, 640), pad_val=114.0),
+ dict(
+ type='RandomAffine', scaling_ratio_range=(0.1, 2),
+ border=(-320, -320)),
+ dict(
+ type='MixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1, 1), keep_empty=False),
+ dict(type='PackDetInputs')
+]
+train_dataset = dict(
+ type='MultiImageMixDataset',
+ dataset=dict(
+ type='CocoDataset',
+ data_root='data/coco/',
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[
+ dict(type='LoadImageFromFile', backend_args=dict(backend='local')),
+ dict(type='LoadAnnotations', with_bbox=True)
+ ],
+ filter_cfg=dict(filter_empty_gt=False, min_size=32)),
+ pipeline=[
+ dict(type='Mosaic', img_scale=(640, 640), pad_val=114.0),
+ dict(
+ type='RandomAffine',
+ scaling_ratio_range=(0.1, 2),
+ border=(-320, -320)),
+ dict(
+ type='MixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(
+ type='FilterAnnotations', min_gt_bbox_wh=(1, 1), keep_empty=False),
+ dict(type='PackDetInputs')
+ ])
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=dict(backend='local')),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type='MultiImageMixDataset',
+ dataset=dict(
+ type='CocoDataset',
+ data_root='data/coco/',
+ ann_file='annotations/coco_face_train.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[
+ dict(
+ type='LoadImageFromFile',
+ backend_args=dict(backend='local')),
+ dict(type='LoadAnnotations', with_bbox=True)
+ ],
+ filter_cfg=dict(filter_empty_gt=False, min_size=32),
+ metainfo=dict(CLASSES=('person', ), PALETTE=(220, 20, 60))),
+ pipeline=[
+ dict(type='Mosaic', img_scale=(640, 640), pad_val=114.0),
+ dict(
+ type='RandomAffine',
+ scaling_ratio_range=(0.1, 2),
+ border=(-320, -320)),
+ dict(
+ type='MixUp',
+ img_scale=(640, 640),
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(
+ type='FilterAnnotations',
+ min_gt_bbox_wh=(1, 1),
+ keep_empty=False),
+ dict(type='PackDetInputs')
+ ]))
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root='data/coco/',
+ ann_file='annotations/coco_face_val.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=[
+ dict(type='LoadImageFromFile', backend_args=dict(backend='local')),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+ ],
+ metainfo=dict(CLASSES=('person', ), PALETTE=(220, 20, 60))))
+test_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type='CocoDataset',
+ data_root='data/coco/',
+ ann_file='annotations/coco_face_val.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=[
+ dict(type='LoadImageFromFile', backend_args=dict(backend='local')),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+ ],
+ metainfo=dict(CLASSES=('person', ), PALETTE=(220, 20, 60))))
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file='data/coco/annotations/coco_face_val.json',
+ metric='bbox')
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file='data/coco/annotations/instances_val2017.json',
+ metric='bbox')
+max_epochs = 300
+num_last_epochs = 15
+interval = 10
+base_lr = 0.01
+custom_hooks = [
+ dict(type='YOLOXModeSwitchHook', num_last_epochs=15, priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0001,
+ strict_load=False,
+ update_buffers=True,
+ priority=49)
+]
+metainfo = dict(CLASSES=('person', ), PALETTE=(220, 20, 60))
+launcher = 'pytorch'
diff --git a/demo/mmtracking_cfg/deepsort_faster-rcnn_fpn_4e_mot17-private-half.py b/demo/mmtracking_cfg/deepsort_faster-rcnn_fpn_4e_mot17-private-half.py
new file mode 100644
index 0000000000000000000000000000000000000000..1d7fccf0cbe9929618274218274726eb28577273
--- /dev/null
+++ b/demo/mmtracking_cfg/deepsort_faster-rcnn_fpn_4e_mot17-private-half.py
@@ -0,0 +1,321 @@
+model = dict(
+ detector=dict(
+ type='FasterRCNN',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[1.0, 1.0, 1.0, 1.0],
+ clip_border=False),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(
+ type='SmoothL1Loss', beta=0.1111111111111111,
+ loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[0.1, 0.1, 0.2, 0.2],
+ clip_border=False),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', loss_weight=1.0))),
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmtracking/'
+ 'mot/faster_rcnn/faster-rcnn_r50_fpn_4e_mot17-half-64ee2ed4.pth')),
+ type='DeepSORT',
+ motion=dict(type='KalmanFilter', center_only=False),
+ reid=dict(
+ type='BaseReID',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ style='pytorch'),
+ neck=dict(type='GlobalAveragePooling', kernel_size=(8, 4), stride=1),
+ head=dict(
+ type='LinearReIDHead',
+ num_fcs=1,
+ in_channels=2048,
+ fc_channels=1024,
+ out_channels=128,
+ num_classes=380,
+ loss=dict(type='CrossEntropyLoss', loss_weight=1.0),
+ loss_pairwise=dict(
+ type='TripletLoss', margin=0.3, loss_weight=1.0),
+ norm_cfg=dict(type='BN1d'),
+ act_cfg=dict(type='ReLU')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmtracking/'
+ 'mot/reid/tracktor_reid_r50_iter25245-a452f51f.pth')),
+ tracker=dict(
+ type='SortTracker',
+ obj_score_thr=0.5,
+ reid=dict(
+ num_samples=10,
+ img_scale=(256, 128),
+ img_norm_cfg=None,
+ match_score_thr=2.0),
+ match_iou_thr=0.5,
+ momentums=None,
+ num_tentatives=2,
+ num_frames_retain=100))
+dataset_type = 'MOTChallengeDataset'
+img_norm_cfg = dict(
+ mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadMultiImagesFromFile', to_float32=True),
+ dict(type='SeqLoadAnnotations', with_bbox=True, with_track=True),
+ dict(
+ type='SeqResize',
+ img_scale=(1088, 1088),
+ share_params=True,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ bbox_clip_border=False),
+ dict(type='SeqPhotoMetricDistortion', share_params=True),
+ dict(
+ type='SeqRandomCrop',
+ share_params=False,
+ crop_size=(1088, 1088),
+ bbox_clip_border=False),
+ dict(type='SeqRandomFlip', share_params=True, flip_ratio=0.5),
+ dict(
+ type='SeqNormalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='SeqPad', size_divisor=32),
+ dict(type='MatchInstances', skip_nomatch=True),
+ dict(
+ type='VideoCollect',
+ keys=[
+ 'img', 'gt_bboxes', 'gt_labels', 'gt_match_indices',
+ 'gt_instance_ids'
+ ]),
+ dict(type='SeqDefaultFormatBundle', ref_prefix='ref')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+]
+data_root = 'data/MOT17/'
+data = dict(
+ samples_per_gpu=2,
+ workers_per_gpu=2,
+ train=dict(
+ type='MOTChallengeDataset',
+ visibility_thr=-1,
+ ann_file='data/MOT17/annotations/half-train_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=dict(
+ num_ref_imgs=1,
+ frame_range=10,
+ filter_key_img=True,
+ method='uniform'),
+ pipeline=[
+ dict(type='LoadMultiImagesFromFile', to_float32=True),
+ dict(type='SeqLoadAnnotations', with_bbox=True, with_track=True),
+ dict(
+ type='SeqResize',
+ img_scale=(1088, 1088),
+ share_params=True,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ bbox_clip_border=False),
+ dict(type='SeqPhotoMetricDistortion', share_params=True),
+ dict(
+ type='SeqRandomCrop',
+ share_params=False,
+ crop_size=(1088, 1088),
+ bbox_clip_border=False),
+ dict(type='SeqRandomFlip', share_params=True, flip_ratio=0.5),
+ dict(
+ type='SeqNormalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='SeqPad', size_divisor=32),
+ dict(type='MatchInstances', skip_nomatch=True),
+ dict(
+ type='VideoCollect',
+ keys=[
+ 'img', 'gt_bboxes', 'gt_labels', 'gt_match_indices',
+ 'gt_instance_ids'
+ ]),
+ dict(type='SeqDefaultFormatBundle', ref_prefix='ref')
+ ]),
+ val=dict(
+ type='MOTChallengeDataset',
+ ann_file='data/MOT17/annotations/half-val_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=None,
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+ ]),
+ test=dict(
+ type='MOTChallengeDataset',
+ ann_file='data/MOT17/annotations/half-val_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=None,
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+ ]))
+optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
+optimizer_config = dict(grad_clip=None)
+checkpoint_config = dict(interval=1)
+log_config = dict(interval=50, hooks=[dict(type='TextLoggerHook')])
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=100,
+ warmup_ratio=0.01,
+ step=[3])
+total_epochs = 4
+evaluation = dict(metric=['bbox', 'track'], interval=1)
+search_metrics = ['MOTA', 'IDF1', 'FN', 'FP', 'IDs', 'MT', 'ML']
diff --git a/demo/mmtracking_cfg/tracktor_faster-rcnn_r50_fpn_4e_mot17-private.py b/demo/mmtracking_cfg/tracktor_faster-rcnn_r50_fpn_4e_mot17-private.py
new file mode 100644
index 0000000000000000000000000000000000000000..9736269bd9ca1f950eadaa7a4933656db3130ca8
--- /dev/null
+++ b/demo/mmtracking_cfg/tracktor_faster-rcnn_r50_fpn_4e_mot17-private.py
@@ -0,0 +1,325 @@
+model = dict(
+ detector=dict(
+ type='FasterRCNN',
+ pretrained='torchvision://resnet50',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[1.0, 1.0, 1.0, 1.0],
+ clip_border=False),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(
+ type='SmoothL1Loss', beta=0.1111111111111111,
+ loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0.0, 0.0, 0.0, 0.0],
+ target_stds=[0.1, 0.1, 0.2, 0.2],
+ clip_border=False),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', loss_weight=1.0))),
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100))),
+ type='Tracktor',
+ pretrains=dict(
+ detector='https://download.openmmlab.com/mmtracking/'
+ 'mot/faster_rcnn/faster-rcnn_r50_fpn_4e_mot17-ffa52ae7.pth',
+ reid='https://download.openmmlab.com/mmtracking/mot/'
+ 'reid/reid_r50_6e_mot17-4bf6b63d.pth'),
+ reid=dict(
+ type='BaseReID',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ style='pytorch'),
+ neck=dict(type='GlobalAveragePooling', kernel_size=(8, 4), stride=1),
+ head=dict(
+ type='LinearReIDHead',
+ num_fcs=1,
+ in_channels=2048,
+ fc_channels=1024,
+ out_channels=128,
+ num_classes=378,
+ loss=dict(type='CrossEntropyLoss', loss_weight=1.0),
+ loss_pairwise=dict(
+ type='TripletLoss', margin=0.3, loss_weight=1.0),
+ norm_cfg=dict(type='BN1d'),
+ act_cfg=dict(type='ReLU'))),
+ motion=dict(
+ type='CameraMotionCompensation',
+ warp_mode='cv2.MOTION_EUCLIDEAN',
+ num_iters=100,
+ stop_eps=1e-05),
+ tracker=dict(
+ type='TracktorTracker',
+ obj_score_thr=0.5,
+ regression=dict(
+ obj_score_thr=0.5,
+ nms=dict(type='nms', iou_threshold=0.6),
+ match_iou_thr=0.3),
+ reid=dict(
+ num_samples=10,
+ img_scale=(256, 128),
+ img_norm_cfg=None,
+ match_score_thr=2.0,
+ match_iou_thr=0.2),
+ momentums=None,
+ num_frames_retain=10))
+dataset_type = 'MOTChallengeDataset'
+img_norm_cfg = dict(
+ mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+train_pipeline = [
+ dict(type='LoadMultiImagesFromFile', to_float32=True),
+ dict(type='SeqLoadAnnotations', with_bbox=True, with_track=True),
+ dict(
+ type='SeqResize',
+ img_scale=(1088, 1088),
+ share_params=True,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ bbox_clip_border=False),
+ dict(type='SeqPhotoMetricDistortion', share_params=True),
+ dict(
+ type='SeqRandomCrop',
+ share_params=False,
+ crop_size=(1088, 1088),
+ bbox_clip_border=False),
+ dict(type='SeqRandomFlip', share_params=True, flip_ratio=0.5),
+ dict(
+ type='SeqNormalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='SeqPad', size_divisor=32),
+ dict(type='MatchInstances', skip_nomatch=True),
+ dict(
+ type='VideoCollect',
+ keys=[
+ 'img', 'gt_bboxes', 'gt_labels', 'gt_match_indices',
+ 'gt_instance_ids'
+ ]),
+ dict(type='SeqDefaultFormatBundle', ref_prefix='ref')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+]
+data_root = 'data/MOT17/'
+data = dict(
+ samples_per_gpu=2,
+ workers_per_gpu=2,
+ train=dict(
+ type='MOTChallengeDataset',
+ visibility_thr=-1,
+ ann_file='data/MOT17/annotations/train_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=dict(
+ num_ref_imgs=1,
+ frame_range=10,
+ filter_key_img=True,
+ method='uniform'),
+ pipeline=[
+ dict(type='LoadMultiImagesFromFile', to_float32=True),
+ dict(type='SeqLoadAnnotations', with_bbox=True, with_track=True),
+ dict(
+ type='SeqResize',
+ img_scale=(1088, 1088),
+ share_params=True,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ bbox_clip_border=False),
+ dict(type='SeqPhotoMetricDistortion', share_params=True),
+ dict(
+ type='SeqRandomCrop',
+ share_params=False,
+ crop_size=(1088, 1088),
+ bbox_clip_border=False),
+ dict(type='SeqRandomFlip', share_params=True, flip_ratio=0.5),
+ dict(
+ type='SeqNormalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='SeqPad', size_divisor=32),
+ dict(type='MatchInstances', skip_nomatch=True),
+ dict(
+ type='VideoCollect',
+ keys=[
+ 'img', 'gt_bboxes', 'gt_labels', 'gt_match_indices',
+ 'gt_instance_ids'
+ ]),
+ dict(type='SeqDefaultFormatBundle', ref_prefix='ref')
+ ]),
+ val=dict(
+ type='MOTChallengeDataset',
+ ann_file='data/MOT17/annotations/train_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=None,
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+ ]),
+ test=dict(
+ type='MOTChallengeDataset',
+ ann_file='data/MOT17/annotations/train_cocoformat.json',
+ img_prefix='data/MOT17/train',
+ ref_img_sampler=None,
+ pipeline=[
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1088, 1088),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(
+ type='Normalize',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='VideoCollect', keys=['img'])
+ ])
+ ]))
+optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
+optimizer_config = dict(grad_clip=None)
+checkpoint_config = dict(interval=1)
+log_config = dict(interval=50, hooks=[dict(type='TextLoggerHook')])
+dist_params = dict(backend='nccl')
+log_level = 'INFO'
+load_from = None
+resume_from = None
+workflow = [('train', 1)]
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=100,
+ warmup_ratio=0.01,
+ step=[3])
+total_epochs = 4
+evaluation = dict(metric=['bbox', 'track'], interval=1)
+search_metrics = ['MOTA', 'IDF1', 'FN', 'FP', 'IDs', 'MT', 'ML']
+test_set = 'train'
diff --git a/demo/resources/CropCOCO_multi_example.jpg b/demo/resources/CropCOCO_multi_example.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..f5e001425408c75cb081fb90e32d7cd7961e8138
--- /dev/null
+++ b/demo/resources/CropCOCO_multi_example.jpg
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:0a984f0ebf562dce970f8ae3d84b9909f6b09da93d73c2829470fd43ece649ef
+size 41538
diff --git a/demo/resources/CropCOCO_single_example.jpg b/demo/resources/CropCOCO_single_example.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..ba5b86ec4d55457aaa9a88372b1929205fa03adf
--- /dev/null
+++ b/demo/resources/CropCOCO_single_example.jpg
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:d4e120dd7e17ddb5cf732e22c18ef582c91d58758aabf6482bf30dee444d5238
+size 63529
diff --git a/demo/resources/ProbPose.ico b/demo/resources/ProbPose.ico
new file mode 100644
index 0000000000000000000000000000000000000000..88be6f81a8bac86f397b5ac630ec8ef7c0c6fb72
--- /dev/null
+++ b/demo/resources/ProbPose.ico
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:6ca0e041abc053a00928d2c08bc4a4d4030890c8c69ed707f7cadff6bc5dd137
+size 180937
diff --git a/demo/resources/demo.mp4 b/demo/resources/demo.mp4
new file mode 100644
index 0000000000000000000000000000000000000000..d99bb27e8e755924924227323d651f3645b98b48
--- /dev/null
+++ b/demo/resources/demo.mp4
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:dc788b413f384887dab9502197657c05393efd1d26825831e4da6fa75b4908c9
+size 204863
diff --git a/demo/resources/demo_coco.gif b/demo/resources/demo_coco.gif
new file mode 100644
index 0000000000000000000000000000000000000000..1843ec2da66c34973f28185e7bca83120b194996
--- /dev/null
+++ b/demo/resources/demo_coco.gif
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:1ac981315c40bb0285e097aa4fe7c817708f8ca90427824ce89999cd262adbac
+size 1604585
diff --git a/demo/resources/multi_demo_result.jpg b/demo/resources/multi_demo_result.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..0953c45dedb9f2b70d69ac579741111c6bb481f3
--- /dev/null
+++ b/demo/resources/multi_demo_result.jpg
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:29fea20b4688ced58e51f33fde52d721141bb2a48f1baad3ee0278b3811e4c7b
+size 86329
diff --git a/demo/resources/single_demo_result.jpg b/demo/resources/single_demo_result.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..eda36eaac5ea05df4d4ff493ae7e4ade57166793
--- /dev/null
+++ b/demo/resources/single_demo_result.jpg
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:d5547c54a4793f6a2bd107980c6b9f1f3873a3f0c549a9cc89a1c7ea8778a1ef
+size 100408
diff --git a/demo/resources/sunglasses.jpg b/demo/resources/sunglasses.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..8e79916dc71ebb461b6c96659b4fc5b481066ae5
--- /dev/null
+++ b/demo/resources/sunglasses.jpg
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:30f6068f01fbaca49ae09fdeef152ffe129cb2d4d92e51b36a4efca6b326cf5e
+size 10744
diff --git a/demo/topdown_demo_with_mmdet.py b/demo/topdown_demo_with_mmdet.py
new file mode 100644
index 0000000000000000000000000000000000000000..4e39c362076b27b3dab23536894f2ce616989938
--- /dev/null
+++ b/demo/topdown_demo_with_mmdet.py
@@ -0,0 +1,302 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import logging
+import mimetypes
+import os
+import time
+from argparse import ArgumentParser
+
+import cv2
+import json_tricks as json
+import mmcv
+import mmengine
+import numpy as np
+from mmengine.logging import print_log
+
+from mmpose.apis import inference_topdown
+from mmpose.apis import init_model as init_pose_estimator
+from mmpose.evaluation.functional import nms
+from mmpose.registry import VISUALIZERS
+from mmpose.structures import merge_data_samples, split_instances
+from mmpose.utils import adapt_mmdet_pipeline
+
+try:
+ from mmdet.apis import inference_detector, init_detector
+ has_mmdet = True
+except (ImportError, ModuleNotFoundError):
+ has_mmdet = False
+
+
+def process_one_image(args,
+ img,
+ detector,
+ pose_estimator,
+ visualizer=None,
+ show_interval=0):
+ """Visualize predicted keypoints (and heatmaps) of one image."""
+
+ # predict bbox
+ det_result = inference_detector(detector, img)
+ pred_instance = det_result.pred_instances.cpu().numpy()
+ bboxes = np.concatenate(
+ (pred_instance.bboxes, pred_instance.scores[:, None]), axis=1)
+ bboxes = bboxes[np.logical_and(pred_instance.labels == args.det_cat_id,
+ pred_instance.scores > args.bbox_thr)]
+ bboxes = bboxes[nms(bboxes, args.nms_thr), :4]
+
+ # predict keypoints
+ pose_results = inference_topdown(pose_estimator, img, bboxes)
+ data_samples = merge_data_samples(pose_results)
+
+ # show the results
+ if isinstance(img, str):
+ img = mmcv.imread(img, channel_order='rgb')
+ elif isinstance(img, np.ndarray):
+ img = mmcv.bgr2rgb(img)
+
+ if visualizer is not None:
+ visualizer.add_datasample(
+ 'result',
+ img,
+ data_sample=data_samples,
+ draw_gt=False,
+ draw_heatmap=args.draw_heatmap,
+ draw_bbox=args.draw_bbox,
+ show_kpt_idx=args.show_kpt_idx,
+ skeleton_style=args.skeleton_style,
+ show=args.show,
+ wait_time=show_interval,
+ kpt_thr=args.kpt_thr)
+
+ # if there is no instance detected, return None
+ return data_samples.get('pred_instances', None)
+
+
+def main():
+ """Visualize the demo images.
+
+ Using mmdet to detect the human.
+ """
+ parser = ArgumentParser()
+ parser.add_argument('det_config', help='Config file for detection')
+ parser.add_argument('det_checkpoint', help='Checkpoint file for detection')
+ parser.add_argument('pose_config', help='Config file for pose')
+ parser.add_argument('pose_checkpoint', help='Checkpoint file for pose')
+ parser.add_argument(
+ '--input', type=str, default='', help='Image/Video file')
+ parser.add_argument(
+ '--show',
+ action='store_true',
+ default=False,
+ help='whether to show img')
+ parser.add_argument(
+ '--output-root',
+ type=str,
+ default='',
+ help='root of the output img file. '
+ 'Default not saving the visualization images.')
+ parser.add_argument(
+ '--save-predictions',
+ action='store_true',
+ default=False,
+ help='whether to save predicted results')
+ parser.add_argument(
+ '--device', default='cuda:0', help='Device used for inference')
+ parser.add_argument(
+ '--det-cat-id',
+ type=int,
+ default=0,
+ help='Category id for bounding box detection model')
+ parser.add_argument(
+ '--bbox-thr',
+ type=float,
+ default=0.3,
+ help='Bounding box score threshold')
+ parser.add_argument(
+ '--nms-thr',
+ type=float,
+ default=0.3,
+ help='IoU threshold for bounding box NMS')
+ parser.add_argument(
+ '--kpt-thr',
+ type=float,
+ default=0.3,
+ help='Visualizing keypoint thresholds')
+ parser.add_argument(
+ '--draw-heatmap',
+ action='store_true',
+ default=False,
+ help='Draw heatmap predicted by the model')
+ parser.add_argument(
+ '--show-kpt-idx',
+ action='store_true',
+ default=False,
+ help='Whether to show the index of keypoints')
+ parser.add_argument(
+ '--skeleton-style',
+ default='mmpose',
+ type=str,
+ choices=['mmpose', 'openpose'],
+ help='Skeleton style selection')
+ parser.add_argument(
+ '--radius',
+ type=int,
+ default=3,
+ help='Keypoint radius for visualization')
+ parser.add_argument(
+ '--thickness',
+ type=int,
+ default=1,
+ help='Link thickness for visualization')
+ parser.add_argument(
+ '--show-interval', type=int, default=0, help='Sleep seconds per frame')
+ parser.add_argument(
+ '--alpha', type=float, default=0.8, help='The transparency of bboxes')
+ parser.add_argument(
+ '--draw-bbox', action='store_true', help='Draw bboxes of instances')
+
+ assert has_mmdet, 'Please install mmdet to run the demo.'
+
+ args = parser.parse_args()
+
+ assert args.show or (args.output_root != '')
+ assert args.input != ''
+ assert args.det_config is not None
+ assert args.det_checkpoint is not None
+
+ output_file = None
+ if args.output_root:
+ mmengine.mkdir_or_exist(args.output_root)
+ output_file = os.path.join(args.output_root,
+ os.path.basename(args.input))
+ if args.input == 'webcam':
+ output_file += '.mp4'
+
+ if args.save_predictions:
+ assert args.output_root != ''
+ args.pred_save_path = f'{args.output_root}/results_' \
+ f'{os.path.splitext(os.path.basename(args.input))[0]}.json'
+
+ # build detector
+ detector = init_detector(
+ args.det_config, args.det_checkpoint, device=args.device)
+ detector.cfg = adapt_mmdet_pipeline(detector.cfg)
+
+ # build pose estimator
+ pose_estimator = init_pose_estimator(
+ args.pose_config,
+ args.pose_checkpoint,
+ device=args.device,
+ cfg_options=dict(
+ model=dict(test_cfg=dict(output_heatmaps=args.draw_heatmap))))
+
+ # build visualizer
+ pose_estimator.cfg.visualizer.radius = args.radius
+ pose_estimator.cfg.visualizer.alpha = args.alpha
+ pose_estimator.cfg.visualizer.line_width = args.thickness
+ visualizer = VISUALIZERS.build(pose_estimator.cfg.visualizer)
+ # the dataset_meta is loaded from the checkpoint and
+ # then pass to the model in init_pose_estimator
+ visualizer.set_dataset_meta(
+ pose_estimator.dataset_meta, skeleton_style=args.skeleton_style)
+
+ if args.input == 'webcam':
+ input_type = 'webcam'
+ else:
+ input_type = mimetypes.guess_type(args.input)[0].split('/')[0]
+
+ if input_type == 'image':
+
+ # inference
+ pred_instances = process_one_image(args, args.input, detector,
+ pose_estimator, visualizer)
+
+ if args.save_predictions:
+ pred_instances_list = split_instances(pred_instances)
+
+ if output_file:
+ img_vis = visualizer.get_image()
+ mmcv.imwrite(mmcv.rgb2bgr(img_vis), output_file)
+
+ elif input_type in ['webcam', 'video']:
+
+ if args.input == 'webcam':
+ cap = cv2.VideoCapture(0)
+ else:
+ cap = cv2.VideoCapture(args.input)
+
+ video_writer = None
+ pred_instances_list = []
+ frame_idx = 0
+
+ while cap.isOpened():
+ success, frame = cap.read()
+ frame_idx += 1
+
+ if not success:
+ break
+
+ # topdown pose estimation
+ pred_instances = process_one_image(args, frame, detector,
+ pose_estimator, visualizer,
+ 0.001)
+
+ if args.save_predictions:
+ # save prediction results
+ pred_instances_list.append(
+ dict(
+ frame_id=frame_idx,
+ instances=split_instances(pred_instances)))
+
+ # output videos
+ if output_file:
+ frame_vis = visualizer.get_image()
+
+ if video_writer is None:
+ fourcc = cv2.VideoWriter_fourcc(*'mp4v')
+ # the size of the image with visualization may vary
+ # depending on the presence of heatmaps
+ video_writer = cv2.VideoWriter(
+ output_file,
+ fourcc,
+ 25, # saved fps
+ (frame_vis.shape[1], frame_vis.shape[0]))
+
+ video_writer.write(mmcv.rgb2bgr(frame_vis))
+
+ if args.show:
+ # press ESC to exit
+ if cv2.waitKey(5) & 0xFF == 27:
+ break
+
+ time.sleep(args.show_interval)
+
+ if video_writer:
+ video_writer.release()
+
+ cap.release()
+
+ else:
+ args.save_predictions = False
+ raise ValueError(
+ f'file {os.path.basename(args.input)} has invalid format.')
+
+ if args.save_predictions:
+ with open(args.pred_save_path, 'w') as f:
+ json.dump(
+ dict(
+ meta_info=pose_estimator.dataset_meta,
+ instance_info=pred_instances_list),
+ f,
+ indent='\t')
+ print(f'predictions have been saved at {args.pred_save_path}')
+
+ if output_file:
+ input_type = input_type.replace('webcam', 'video')
+ print_log(
+ f'the output {input_type} has been saved at {output_file}',
+ logger='current',
+ level=logging.INFO)
+
+
+if __name__ == '__main__':
+ main()
diff --git a/docker/Dockerfile b/docker/Dockerfile
new file mode 100644
index 0000000000000000000000000000000000000000..064b803979d0f38c53370a375d2cecb9be3b6a09
--- /dev/null
+++ b/docker/Dockerfile
@@ -0,0 +1,34 @@
+ARG PYTORCH="1.8.1"
+ARG CUDA="10.2"
+ARG CUDNN="7"
+
+FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel
+
+ENV TORCH_CUDA_ARCH_LIST="6.0 6.1 7.0+PTX"
+ENV TORCH_NVCC_FLAGS="-Xfatbin -compress-all"
+ENV CMAKE_PREFIX_PATH="$(dirname $(which conda))/../"
+
+# To fix GPG key error when running apt-get update
+RUN apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/3bf863cc.pub
+RUN apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64/7fa2af80.pub
+
+RUN apt-get update && apt-get install -y git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 libgl1-mesa-glx\
+ && apt-get clean \
+ && rm -rf /var/lib/apt/lists/*
+
+# Install xtcocotools
+RUN pip install cython
+RUN pip install xtcocotools
+
+# Install MMEngine and MMCV
+RUN pip install openmim
+RUN mim install mmengine "mmcv>=2.0.0"
+
+# Install MMPose
+RUN conda clean --all
+RUN git clone https://github.com/open-mmlab/mmpose.git /mmpose
+WORKDIR /mmpose
+RUN git checkout main
+ENV FORCE_CUDA="1"
+RUN pip install -r requirements/build.txt
+RUN pip install --no-cache-dir -e .
diff --git a/docker/serve/Dockerfile b/docker/serve/Dockerfile
new file mode 100644
index 0000000000000000000000000000000000000000..091599b51a932b2461c872e17cce3c57766168eb
--- /dev/null
+++ b/docker/serve/Dockerfile
@@ -0,0 +1,51 @@
+ARG PYTORCH="1.8.1"
+ARG CUDA="10.2"
+ARG CUDNN="7"
+FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel
+
+ARG MMCV="2.0.0rc4"
+ARG MMPOSE="1.0.0rc1"
+
+ENV PYTHONUNBUFFERED TRUE
+
+RUN apt-get update && \
+ DEBIAN_FRONTEND=noninteractive apt-get install --no-install-recommends -y \
+ ca-certificates \
+ g++ \
+ openjdk-11-jre-headless \
+ # MMDet Requirements
+ ffmpeg libsm6 libxext6 git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 \
+ && rm -rf /var/lib/apt/lists/*
+
+ENV PATH="/opt/conda/bin:$PATH"
+RUN export FORCE_CUDA=1
+
+
+# MMLAB
+ARG PYTORCH
+ARG CUDA
+RUN pip install mmengine
+RUN ["/bin/bash", "-c", "pip install mmcv==${MMCV}} -f https://download.openmmlab.com/mmcv/dist/cu${CUDA//./}/torch${PYTORCH}/index.html"]
+RUN pip install mmpose==${MMPOSE}
+
+# TORCHSEVER
+RUN pip install torchserve torch-model-archiver
+
+RUN useradd -m model-server \
+ && mkdir -p /home/model-server/tmp
+
+COPY entrypoint.sh /usr/local/bin/entrypoint.sh
+
+RUN chmod +x /usr/local/bin/entrypoint.sh \
+ && chown -R model-server /home/model-server
+
+COPY config.properties /home/model-server/config.properties
+RUN mkdir /home/model-server/model-store && chown -R model-server /home/model-server/model-store
+
+EXPOSE 8080 8081 8082
+
+USER model-server
+WORKDIR /home/model-server
+ENV TEMP=/home/model-server/tmp
+ENTRYPOINT ["/usr/local/bin/entrypoint.sh"]
+CMD ["serve"]
diff --git a/docker/serve/config.properties b/docker/serve/config.properties
new file mode 100644
index 0000000000000000000000000000000000000000..efb9c47e40ab550bac765611e6c6c6f2a7152f11
--- /dev/null
+++ b/docker/serve/config.properties
@@ -0,0 +1,5 @@
+inference_address=http://0.0.0.0:8080
+management_address=http://0.0.0.0:8081
+metrics_address=http://0.0.0.0:8082
+model_store=/home/model-server/model-store
+load_models=all
diff --git a/docker/serve/entrypoint.sh b/docker/serve/entrypoint.sh
new file mode 100644
index 0000000000000000000000000000000000000000..41ba00b048aed84b45c5a8015a016ff148e97d86
--- /dev/null
+++ b/docker/serve/entrypoint.sh
@@ -0,0 +1,12 @@
+#!/bin/bash
+set -e
+
+if [[ "$1" = "serve" ]]; then
+ shift 1
+ torchserve --start --ts-config /home/model-server/config.properties
+else
+ eval "$@"
+fi
+
+# prevent docker exit
+tail -f /dev/null
diff --git a/docs/en/Makefile b/docs/en/Makefile
new file mode 100644
index 0000000000000000000000000000000000000000..d4bb2cbb9eddb1bb1b4f366623044af8e4830919
--- /dev/null
+++ b/docs/en/Makefile
@@ -0,0 +1,20 @@
+# Minimal makefile for Sphinx documentation
+#
+
+# You can set these variables from the command line, and also
+# from the environment for the first two.
+SPHINXOPTS ?=
+SPHINXBUILD ?= sphinx-build
+SOURCEDIR = .
+BUILDDIR = _build
+
+# Put it first so that "make" without argument is like "make help".
+help:
+ @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
+
+.PHONY: help Makefile
+
+# Catch-all target: route all unknown targets to Sphinx using the new
+# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
+%: Makefile
+ @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
diff --git a/docs/en/_static/css/readthedocs.css b/docs/en/_static/css/readthedocs.css
new file mode 100644
index 0000000000000000000000000000000000000000..e75ab1b46a886e3a0031c4715e30f47cbd834d05
--- /dev/null
+++ b/docs/en/_static/css/readthedocs.css
@@ -0,0 +1,10 @@
+.header-logo {
+ background-image: url("../images/mmpose-logo.png");
+ background-size: 120px 50px;
+ height: 50px;
+ width: 120px;
+}
+
+table.autosummary td {
+ width: 35%
+}
diff --git a/docs/en/_static/images/mmpose-logo.png b/docs/en/_static/images/mmpose-logo.png
new file mode 100644
index 0000000000000000000000000000000000000000..1704dc9abdc743f774d5e04782077d0be8bccd73
--- /dev/null
+++ b/docs/en/_static/images/mmpose-logo.png
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:6342cc3ea98ab9910db6d28edaadd2c6b04713a685e486128615cf532cd5e615
+size 28553
diff --git a/docs/en/advanced_guides/codecs.md b/docs/en/advanced_guides/codecs.md
new file mode 100644
index 0000000000000000000000000000000000000000..e874f389d3157bfa8332e880c536991888f5a2af
--- /dev/null
+++ b/docs/en/advanced_guides/codecs.md
@@ -0,0 +1,471 @@
+# Learn about Codecs
+
+In the keypoint detection task, depending on the algorithm, it is often necessary to generate targets in different formats, such as normalized coordinates, vectors and heatmaps, etc. Similarly, for the model outputs, a decoding process is required to transform them into coordinates.
+
+Encoding and decoding are closely related and inverse each other. In earlier versions of MMPose, encoding and decoding are implemented at different modules, making it less intuitive and unified.
+
+MMPose 1.0 introduced a new module **Codec** to integrate the encoding and decoding together in a modular and user-friendly form.
+
+Here is a diagram to show where the `Codec` is:
+
+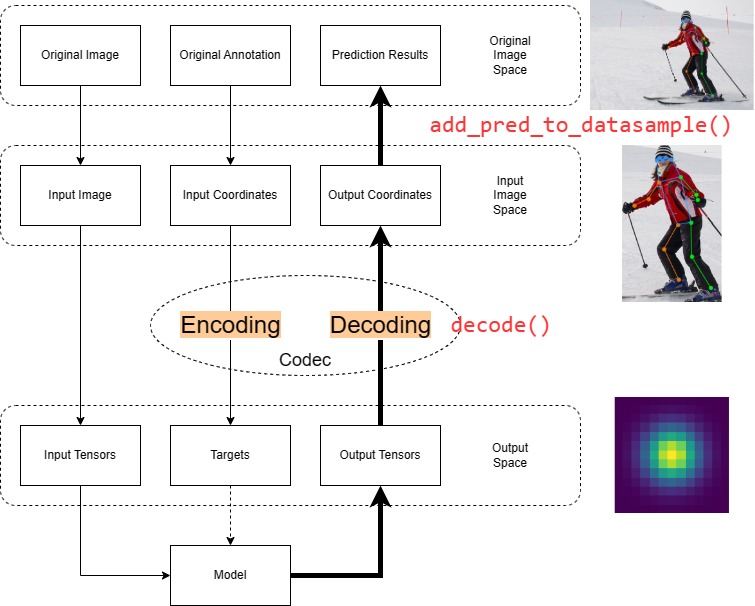
+
+## Basic Concepts
+
+A typical codec consists of two parts:
+
+- Encoder
+- Decoder
+
+### Encoder
+
+The encoder transforms the coordinates in the input image space into the needed target format:
+
+- Normalized Coordinates
+- One-dimensional Vectors
+- Gaussian Heatmaps
+
+For example, in the Regression-based method, the encoder will be:
+
+```Python
+def encode(self,
+ keypoints: np.ndarray,
+ keypoints_visible: Optional[np.ndarray] = None) -> dict:
+ """Encoding keypoints from input image space to normalized space.
+
+ Args:
+ keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D)
+ keypoints_visible (np.ndarray): Keypoint visibilities in shape
+ (N, K)
+
+ Returns:
+ dict:
+ - keypoint_labels (np.ndarray): The normalized regression labels in
+ shape (N, K, D) where D is 2 for 2d coordinates
+ - keypoint_weights (np.ndarray): The target weights in shape
+ (N, K)
+ """
+ if keypoints_visible is None:
+ keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32)
+
+ w, h = self.input_size
+ valid = ((keypoints >= 0) &
+ (keypoints <= [w - 1, h - 1])).all(axis=-1) & (
+ keypoints_visible > 0.5)
+
+ keypoint_labels = (keypoints / np.array([w, h])).astype(np.float32)
+ keypoint_weights = np.where(valid, 1., 0.).astype(np.float32)
+
+ encoded = dict(
+ keypoint_labels=keypoint_labels, keypoint_weights=keypoint_weights)
+
+ return encoded
+```
+
+The encoded data is converted to Tensor format in `PackPoseInputs` and packed in `data_sample.gt_instance_labels` for model calls. By default it will consist of the following encoded fields:
+
+- `keypoint_labels`
+- `keypoint_weights`
+- `keypoints_visible_weights`
+
+To specify data fields to be packed, you can define the `label_mapping_table` attribute in the codec. For example, in `VideoPoseLifting`:
+
+```Python
+label_mapping_table = dict(
+ trajectory_weights='trajectory_weights',
+ lifting_target_label='lifting_target_label',
+ lifting_target_weight='lifting_target_weight',
+)
+```
+
+`data_sample.gt_instance_labels` are generally used for loss calculation, as demonstrated by `loss()` in `RegressionHead`.
+
+```Python
+def loss(self,
+ inputs: Tuple[Tensor],
+ batch_data_samples: OptSampleList,
+ train_cfg: ConfigType = {}) -> dict:
+ """Calculate losses from a batch of inputs and data samples."""
+
+ pred_outputs = self.forward(inputs)
+
+ keypoint_labels = torch.cat(
+ [d.gt_instance_labels.keypoint_labels for d in batch_data_samples])
+ keypoint_weights = torch.cat([
+ d.gt_instance_labels.keypoint_weights for d in batch_data_samples
+ ])
+
+ # calculate losses
+ losses = dict()
+ loss = self.loss_module(pred_outputs, keypoint_labels,
+ keypoint_weights.unsqueeze(-1))
+
+ losses.update(loss_kpt=loss)
+ ### Omitted ###
+```
+
+```{note}
+Encoder also defines data to be packed in `data_sample.gt_instances` and `data_sample.gt_fields`. Modify `instance_mapping_table` and `field_mapping_table` in the codec will specify values to be packed respectively. For default values, please check [BaseKeypointCodec](https://github.com/open-mmlab/mmpose/blob/main/mmpose/codecs/base.py).
+```
+
+### Decoder
+
+The decoder transforms the model outputs into coordinates in the input image space, which is the opposite processing of the encoder.
+
+For example, in the Regression-based method, the decoder will be:
+
+```Python
+def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]:
+ """Decode keypoint coordinates from normalized space to input image
+ space.
+
+ Args:
+ encoded (np.ndarray): Coordinates in shape (N, K, D)
+
+ Returns:
+ tuple:
+ - keypoints (np.ndarray): Decoded coordinates in shape (N, K, D)
+ - scores (np.ndarray): The keypoint scores in shape (N, K).
+ It usually represents the confidence of the keypoint prediction
+
+ """
+
+ if encoded.shape[-1] == 2:
+ N, K, _ = encoded.shape
+ normalized_coords = encoded.copy()
+ scores = np.ones((N, K), dtype=np.float32)
+ elif encoded.shape[-1] == 4:
+ # split coords and sigma if outputs contain output_sigma
+ normalized_coords = encoded[..., :2].copy()
+ output_sigma = encoded[..., 2:4].copy()
+ scores = (1 - output_sigma).mean(axis=-1)
+ else:
+ raise ValueError(
+ 'Keypoint dimension should be 2 or 4 (with sigma), '
+ f'but got {encoded.shape[-1]}')
+
+ w, h = self.input_size
+ keypoints = normalized_coords * np.array([w, h])
+
+ return keypoints, scores
+```
+
+By default, the `decode()` method only performs decoding on a single instance. You can also implement the `batch_decode()` method to boost the decoding process.
+
+## Common Usage
+
+The example below shows how to use a codec in your config:
+
+- Define the Codec
+- Generate Targets
+- Head
+
+### Define the Codec
+
+Take the Regression-based method to generate normalized coordinates as an example, you can define a `codec` in your config as follows:
+
+```Python
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+```
+
+### Generate Targets
+
+In pipelines, A codec should be passed into `GenerateTarget` to work as the `encoder`:
+
+```Python
+dict(type='GenerateTarget', encoder=codec)
+```
+
+### Head
+
+In MMPose workflows, we decode the model outputs in `Head`, which requires a codec to work as the `decoder`:
+
+```Python
+head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec
+)
+```
+
+Here is the phase of a config file:
+
+```Python
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256)) ## definition ##
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec), ## Head ##
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec), ## Generate Target ##
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+```
+
+## Supported Codecs
+
+Supported codecs are in [$MMPOSE/mmpose/codecs/](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/codecs). Here is a list:
+
+- [RegressionLabel](#RegressionLabel)
+- [IntegralRegressionLabel](#IntegralRegressionLabel)
+- [MSRAHeatmap](#MSRAHeatmap)
+- [UDPHeatmap](#UDPHeatmap)
+- [MegviiHeatmap](#MegviiHeatmap)
+- [SPR](#SPR)
+- [SimCC](#SimCC)
+- [DecoupledHeatmap](#DecoupledHeatmap)
+- [ImagePoseLifting](#ImagePoseLifting)
+- [VideoPoseLifting](#VideoPoseLifting)
+- [MotionBERTLabel](#MotionBERTLabel)
+
+### RegressionLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/regression_label.py#L12)
+
+The `RegressionLabel` codec is used to generate normalized coordinates as the regression targets.
+
+**Input**
+
+- Encoding keypoints from input image space to normalized space.
+
+**Output**
+
+- Decoding normalized coordinates from normalized space to input image space.
+
+Related works:
+
+- [DeepPose](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#deeppose-cvpr-2014)
+- [RLE](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rle-iccv-2021)
+
+### IntegralRegressionLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/integral_regression_label.py)
+
+The `IntegralRegressionLabel` codec is used to generate normalized coordinates as the regression targets.
+
+**Input**
+
+- Encoding keypoints from input image space to normalized space, and generate Gaussian heatmaps as well.
+
+**Output**
+
+- Decoding normalized coordinates from normalized space to input image space.
+
+Related works:
+
+- [IPR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#ipr-eccv-2018)
+- [DSNT](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#dsnt-2018)
+- [Debias IPR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#debias-ipr-iccv-2021)
+
+### MSRAHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/msra_heatmap.py)
+
+The `MSRAHeatmap` codec is used to generate Gaussian heatmaps as the targets.
+
+**Input**
+
+- Encoding keypoints from input image space to output space as 2D Gaussian heatmaps.
+
+**Output**
+
+- Decoding 2D Gaussian heatmaps from output space to input image space as coordinates.
+
+Related works:
+
+- [SimpleBaseline2D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simplebaseline2d-eccv-2018)
+- [CPM](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#cpm-cvpr-2016)
+- [HRNet](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#hrnet-cvpr-2019)
+- [DARK](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#darkpose-cvpr-2020)
+
+### UDPHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/udp_heatmap.py)
+
+The `UDPHeatmap` codec is used to generate Gaussian heatmaps as the targets.
+
+**Input**
+
+- Encoding keypoints from input image space to output space as 2D Gaussian heatmaps.
+
+**Output**
+
+- Decoding 2D Gaussian heatmaps from output space to input image space as coordinates.
+
+Related works:
+
+- [UDP](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#udp-cvpr-2020)
+
+### MegviiHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/megvii_heatmap.py)
+
+The `MegviiHeatmap` codec is used to generate Gaussian heatmaps as the targets, which is usually used in Megvii's works.
+
+**Input**
+
+- Encoding keypoints from input image space to output space as 2D Gaussian heatmaps.
+
+**Output**
+
+- Decoding 2D Gaussian heatmaps from output space to input image space as coordinates.
+
+Related works:
+
+- [MSPN](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#mspn-arxiv-2019)
+- [RSN](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rsn-eccv-2020)
+
+### SPR
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/spr.py)
+
+The `SPR` codec is used to generate Gaussian heatmaps of instances' center, and offsets as the targets.
+
+**Input**
+
+- Encoding keypoints from input image space to output space as 2D Gaussian heatmaps and offsets.
+
+**Output**
+
+- Decoding 2D Gaussian heatmaps and offsets from output space to input image space as coordinates.
+
+Related works:
+
+- [DEKR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#dekr-cvpr-2021)
+
+### SimCC
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/simcc_label.py)
+
+The `SimCC` codec is used to generate 1D Gaussian representations as the targets.
+
+**Input**
+
+- Encoding keypoints from input image space to output space as 1D Gaussian representations.
+
+**Output**
+
+- Decoding 1D Gaussian representations from output space to input image space as coordinates.
+
+Related works:
+
+- [SimCC](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simcc-eccv-2022)
+- [RTMPose](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rtmpose-arxiv-2023)
+
+### DecoupledHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/decoupled_heatmap.py)
+
+The `DecoupledHeatmap` codec is used to generate Gaussian heatmaps as the targets.
+
+**Input**
+
+- Encoding human center points and keypoints from input image space to output space as 2D Gaussian heatmaps.
+
+**Output**
+
+- Decoding 2D Gaussian heatmaps from output space to input image space as coordinates.
+
+Related works:
+
+- [CID](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#cid-cvpr-2022)
+
+### ImagePoseLifting
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/image_pose_lifting.py)
+
+The `ImagePoseLifting` codec is used for image 2D-to-3D pose lifting.
+
+**Input**
+
+- Encoding 2d keypoints from input image space to normalized 3d space.
+
+**Output**
+
+- Decoding 3d keypoints from normalized space to input image space.
+
+Related works:
+
+- [SimpleBaseline3D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simplebaseline3d-iccv-2017)
+
+### VideoPoseLifting
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/video_pose_lifting.py)
+
+The `VideoPoseLifting` codec is used for video 2D-to-3D pose lifting.
+
+**Input**
+
+- Encoding 2d keypoints from input image space to normalized 3d space.
+
+**Output**
+
+- Decoding 3d keypoints from normalized space to input image space.
+
+Related works:
+
+- [VideoPose3D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#videopose3d-cvpr-2019)
+
+### MotionBERTLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/motionbert_label.py)
+
+The `MotionBERTLabel` codec is used for video 2D-to-3D pose lifting.
+
+**Input**
+
+- Encoding 2d keypoints from input image space to normalized 3d space.
+
+**Output**
+
+- Decoding 3d keypoints from normalized space to input image space.
+
+Related works:
+
+- [MotionBERT](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo/body_3d_keypoint.html#pose-lift-motionbert-on-h36m)
diff --git a/docs/en/advanced_guides/customize_datasets.md b/docs/en/advanced_guides/customize_datasets.md
new file mode 100644
index 0000000000000000000000000000000000000000..aec7520a30080a4d11371085e425b4a5e0ab4d34
--- /dev/null
+++ b/docs/en/advanced_guides/customize_datasets.md
@@ -0,0 +1,255 @@
+# Customize Datasets
+
+## Customize datasets by reorganizing data to COCO format
+
+The simplest way to use the custom dataset is to convert your annotation format to COCO dataset format.
+
+The annotation JSON files in COCO format have the following necessary keys:
+
+```python
+'images': [
+ {
+ 'file_name': '000000001268.jpg',
+ 'height': 427,
+ 'width': 640,
+ 'id': 1268
+ },
+ ...
+],
+'annotations': [
+ {
+ 'segmentation': [[426.36,
+ ...
+ 424.34,
+ 223.3]],
+ 'keypoints': [0,0,0,
+ 0,0,0,
+ 0,0,0,
+ 427,220,2,
+ 443,222,2,
+ 414,228,2,
+ 449,232,2,
+ 408,248,1,
+ 454,261,2,
+ 0,0,0,
+ 0,0,0,
+ 411,287,2,
+ 431,287,2,
+ 0,0,0,
+ 458,265,2,
+ 0,0,0,
+ 466,300,1],
+ 'num_keypoints': 10,
+ 'area': 3894.5826,
+ 'iscrowd': 0,
+ 'image_id': 1268,
+ 'bbox': [402.34, 205.02, 65.26, 88.45],
+ 'category_id': 1,
+ 'id': 215218
+ },
+ ...
+],
+'categories': [
+ {'id': 1, 'name': 'person'},
+ ]
+```
+
+There are three necessary keys in the json file:
+
+- `images`: contains a list of images with their information like `file_name`, `height`, `width`, and `id`.
+- `annotations`: contains the list of instance annotations.
+- `categories`: contains the category name ('person') and its ID (1).
+
+If the annotations have been organized in COCO format, there is no need to create a new dataset class. You can use `CocoDataset` class alternatively.
+
+## Create a custom dataset_info config file for the dataset
+
+Add a new dataset info config file that contains the metainfo about the dataset.
+
+```
+configs/_base_/datasets/custom.py
+```
+
+An example of the dataset config is as follows.
+
+- `keypoint_info` contains the information about each keypoint.
+ 1. `name`: the keypoint name. The keypoint name must be unique.
+ 2. `id`: the keypoint id.
+ 3. `color`: (\[B, G, R\]) is used for keypoint visualization.
+ 4. `type`: 'upper' or 'lower', will be used in data augmentation [RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py#L263).
+ 5. `swap`: indicates the 'swap pair' (also known as 'flip pair'). When applying image horizontal flip, the left part will become the right part, used in data augmentation [RandomFlip](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py#L94). We need to flip the keypoints accordingly.
+- `skeleton_info` contains information about the keypoint connectivity, which is used for visualization.
+- `joint_weights` assigns different loss weights to different keypoints.
+- `sigmas` is used to calculate the OKS score. You can read [keypoints-eval](https://cocodataset.org/#keypoints-eval) to learn more about it.
+
+Here is an simplified example of dataset_info config file ([full text](/configs/_base_/datasets/coco.py)).
+
+```
+dataset_info = dict(
+ dataset_name='coco',
+ paper_info=dict(
+ author='Lin, Tsung-Yi and Maire, Michael and '
+ 'Belongie, Serge and Hays, James and '
+ 'Perona, Pietro and Ramanan, Deva and '
+ r'Doll{\'a}r, Piotr and Zitnick, C Lawrence',
+ title='Microsoft coco: Common objects in context',
+ container='European conference on computer vision',
+ year='2014',
+ homepage='http://cocodataset.org/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ ...
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ ...
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
+```
+
+## Create a custom dataset class
+
+If the annotations are not organized in COCO format, you need to create a custom dataset class by the following steps:
+
+1. First create a package inside the `mmpose/datasets/datasets` folder.
+
+2. Create a class definition of your dataset in the package folder and register it in the registry with a name. Without a name, it will keep giving the error. `KeyError: 'XXXXX is not in the dataset registry'`
+
+ ```
+ from mmengine.dataset import BaseDataset
+ from mmpose.registry import DATASETS
+
+ @DATASETS.register_module(name='MyCustomDataset')
+ class MyCustomDataset(BaseDataset):
+ ```
+
+ You can refer to [this doc](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html) on how to build customed dataset class with `mmengine.BaseDataset`.
+
+3. Make sure you have updated the `__init__.py` of your package folder
+
+4. Make sure you have updated the `__init__.py` of the dataset package folder.
+
+## Create a custom training config file
+
+Create a custom training config file as per your need and the model/architecture you want to use in the configs folder. You may modify an existing config file to use the new custom dataset.
+
+In `configs/my_custom_config.py`:
+
+```python
+...
+# dataset and dataloader settings
+dataset_type = 'MyCustomDataset' # or 'CocoDataset'
+
+train_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/train/data',
+ ann_file='path/to/your/train/json',
+ data_prefix=dict(img='path/to/your/train/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+val_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/val/data',
+ ann_file='path/to/your/val/json',
+ data_prefix=dict(img='path/to/your/val/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+test_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/test/data',
+ ann_file='path/to/your/test/json',
+ data_prefix=dict(img='path/to/your/test/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+...
+```
+
+Make sure you have provided all the paths correctly.
+
+## Dataset Wrappers
+
+The following dataset wrappers are supported in [MMEngine](https://github.com/open-mmlab/mmengine), you can refer to [MMEngine tutorial](https://mmengine.readthedocs.io/en/latest) to learn how to use it.
+
+- [ConcatDataset](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html#concatdataset)
+- [RepeatDataset](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html#repeatdataset)
+
+### CombinedDataset
+
+MMPose provides [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) to combine multiple datasets with different annotations. A combined dataset can be defined in config files as:
+
+```python
+dataset_1 = dict(
+ type='dataset_type_1',
+ data_root='root/of/your/dataset1',
+ data_prefix=dict(img_path='path/to/your/img'),
+ ann_file='annotations/train.json',
+ pipeline=[
+ # the converter transforms convert data into a unified format
+ converter_transform_1
+ ])
+
+dataset_2 = dict(
+ type='dataset_type_2',
+ data_root='root/of/your/dataset2',
+ data_prefix=dict(img_path='path/to/your/img'),
+ ann_file='annotations/train.json',
+ pipeline=[
+ converter_transform_2
+ ])
+
+shared_pipeline = [
+ LoadImage(),
+ ParseImage(),
+]
+
+combined_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='path/to/your/metainfo'),
+ datasets=[dataset_1, dataset_2],
+ pipeline=shared_pipeline,
+)
+```
+
+- **MetaInfo of combined dataset** determines the annotation format. Either metainfo of a sub-dataset or a customed dataset metainfo is valid here. To custom a dataset metainfo, please refer to [Create a custom dataset_info config file for the dataset](#create-a-custom-datasetinfo-config-file-for-the-dataset).
+
+- **Converter transforms of sub-datasets** are applied when there exist mismatches of annotation format between sub-datasets and the combined dataset. For example, the number and order of keypoints might be different in the combined dataset and the sub-datasets. Then [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) can be used to unify the keypoints number and order.
+
+- More details about [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) and [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) can be found in [Advanced Guides - Training with Mixed Datasets](../user_guides/mixed_datasets.md).
diff --git a/docs/en/advanced_guides/customize_evaluation.md b/docs/en/advanced_guides/customize_evaluation.md
new file mode 100644
index 0000000000000000000000000000000000000000..95effaf9ca0f08b8edcae2d28d30a30f663f31a1
--- /dev/null
+++ b/docs/en/advanced_guides/customize_evaluation.md
@@ -0,0 +1,5 @@
+# Customize Evaluation
+
+Coming soon.
+
+Currently, you can refer to [Evaluation Tutorial of MMEngine](https://mmengine.readthedocs.io/en/latest/tutorials/evaluation.html) to customize your own evaluation.
diff --git a/docs/en/advanced_guides/customize_logging.md b/docs/en/advanced_guides/customize_logging.md
new file mode 100644
index 0000000000000000000000000000000000000000..093a530dba933bda7dcae4ff33189f816c51f970
--- /dev/null
+++ b/docs/en/advanced_guides/customize_logging.md
@@ -0,0 +1,3 @@
+# Customize Logging
+
+Coming soon.
diff --git a/docs/en/advanced_guides/customize_optimizer.md b/docs/en/advanced_guides/customize_optimizer.md
new file mode 100644
index 0000000000000000000000000000000000000000..fd6a28297f16cd4a04064b1617fb5ef67af7f13e
--- /dev/null
+++ b/docs/en/advanced_guides/customize_optimizer.md
@@ -0,0 +1,3 @@
+# Customize Optimizer and Scheduler
+
+Coming soon.
diff --git a/docs/en/advanced_guides/customize_transforms.md b/docs/en/advanced_guides/customize_transforms.md
new file mode 100644
index 0000000000000000000000000000000000000000..b8e13459f9ba80c445c12b487c9471a0974f68a1
--- /dev/null
+++ b/docs/en/advanced_guides/customize_transforms.md
@@ -0,0 +1,212 @@
+# Customize Data Transformation and Augmentation
+
+## DATA TRANSFORM
+
+In the OpenMMLab algorithm library, the construction of the dataset and the preparation of the data are decoupled from each other. Usually, the construction of the dataset only analyzes the dataset and records the basic information of each sample, while the preparation of the data is through a series of According to the basic information of the sample, perform data loading, preprocessing, formatting and other operations.
+
+### The use of data transformation
+
+The **data transformation** and **data augmentation** classes in **MMPose** are defined in the [$MMPose/datasets/transforms](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/datasets/transforms) directory, and the corresponding file structure is as follows:
+
+```txt
+mmpose
+|----datasets
+ |----transforms
+ |----bottomup_transforms # Button-Up transforms
+ |----common_transforms # Common Transforms
+ |----converting # Keypoint converting
+ |----formatting # Input data formatting
+ |----loading # Raw data loading
+ |----pose3d_transforms # Pose3d-transforms
+ |----topdown_transforms # Top-Down transforms
+```
+
+In **MMPose**, **data augmentation** and **data transformation** is a stage that users often need to consider. You can refer to the following process to design related stages:
+
+[](https://mermaid-js.github.io/mermaid-live-editor/edit#pako:eNp9UbFOwzAQ_ZXIczuQbBkYKAKKOlRpJ5TlGp8TC9sX2WdVpeq_Y0cClahl8rv3nt_d2WfRkURRC2Xo2A3gudg0rSuKEA-9h3Eo9h5cUORteMj8i9FjPt_AqCeSp4wbYmBNLuPdoBVPJAb9hRmtyJB_18zkc4lO3mlQZv4VHXpg3IPvkf-_UGV-C93nlgKu3Riv_Q0c1xZ6LJbLx_kWSdvAAc0t7aqc5Cl3Srqrroi81C5NHbJnzs26lH9zyplc_UbcGr8SC2HRW9Ay_do5e1vBA1psRZ2gRAXRcCtad0lWiEy7k-tEzT7iQsRRpomeNaSntKJWYEJiR3AfRD_15RuTF7md)
+
+The `common_transforms` component provides commonly used `RandomFlip`, `RandomHalfBody` **data augmentation**.
+
+- Operations such as `Shift`, `Rotate`, and `Resize` in the `Top-Down` method are reflected in the [RandomBBoxTransform](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L435) method.
+- The [BottomupResize](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/bottomup_transforms.py#L327) method is embodied in the `Buttom-Up` algorithm.
+- `pose-3d` is the [RandomFlipAroundRoot](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/pose3d_transforms.py#L13) method.
+
+**MMPose** provides corresponding data conversion interfaces for `Top-Down`, `Button-Up`, and `pose-3d`. Transform the image and coordinate labels from the `original_image_space` to the `input_image_space` by using an affine transformation.
+
+- The `Top-Down` method is manifested as [TopdownAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/topdown_transforms.py#L14).
+- The `Bottom-Up` method is embodied as [BottomupRandomAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/bottomup_transforms.py#L134).
+
+Taking `RandomFlip` as an example, this method randomly transforms the `original_image` and converts it into an `input_image` or an `intermediate_image`. To define a data transformation process, you need to inherit the [BaseTransform](https://github.com/open-mmlab/mmcv/blob/main/mmcv/transforms/base.py) class and register with `TRANSFORM`:
+
+```python
+from mmcv.transforms import BaseTransform
+from mmpose.registry import TRANSFORMS
+
+@TRANSFORMS.register_module()
+class RandomFlip(BaseTransform):
+ """Randomly flip the image, bbox and keypoints.
+
+ Required Keys:
+
+ - img
+ - img_shape
+ - flip_indices
+ - input_size (optional)
+ - bbox (optional)
+ - bbox_center (optional)
+ - keypoints (optional)
+ - keypoints_visible (optional)
+ - img_mask (optional)
+
+ Modified Keys:
+
+ - img
+ - bbox (optional)
+ - bbox_center (optional)
+ - keypoints (optional)
+ - keypoints_visible (optional)
+ - img_mask (optional)
+
+ Added Keys:
+
+ - flip
+ - flip_direction
+
+ Args:
+ prob (float | list[float]): The flipping probability. If a list is
+ given, the argument `direction` should be a list with the same
+ length. And each element in `prob` indicates the flipping
+ probability of the corresponding one in ``direction``. Defaults
+ to 0.5
+ direction (str | list[str]): The flipping direction. Options are
+ ``'horizontal'``, ``'vertical'`` and ``'diagonal'``. If a list is
+ is given, each data sample's flipping direction will be sampled
+ from a distribution determined by the argument ``prob``. Defaults
+ to ``'horizontal'``.
+ """
+ def __init__(self,
+ prob: Union[float, List[float]] = 0.5,
+ direction: Union[str, List[str]] = 'horizontal') -> None:
+ if isinstance(prob, list):
+ assert is_list_of(prob, float)
+ assert 0 <= sum(prob) <= 1
+ elif isinstance(prob, float):
+ assert 0 <= prob <= 1
+ else:
+ raise ValueError(f'probs must be float or list of float, but \
+ got `{type(prob)}`.')
+ self.prob = prob
+
+ valid_directions = ['horizontal', 'vertical', 'diagonal']
+ if isinstance(direction, str):
+ assert direction in valid_directions
+ elif isinstance(direction, list):
+ assert is_list_of(direction, str)
+ assert set(direction).issubset(set(valid_directions))
+ else:
+ raise ValueError(f'direction must be either str or list of str, \
+ but got `{type(direction)}`.')
+ self.direction = direction
+
+ if isinstance(prob, list):
+ assert len(prob) == len(self.direction)
+```
+
+**Input**:
+
+- `prob` specifies the probability of transformation in horizontal, vertical, diagonal, etc., and is a `list` of floating-point numbers in the range \[0,1\].
+- `direction` specifies the direction of data transformation:
+ - `horizontal`
+ - `vertical`
+ - `diagonal`
+
+**Output**:
+
+- Return a `dict` data after data transformation.
+
+Here is a simple example of using `diagonal RandomFlip`:
+
+```python
+from mmpose.datasets.transforms import LoadImage, RandomFlip
+import mmcv
+
+# Load the original image from the path
+results = dict(
+ img_path='data/test/multi-person.jpeg'
+ )
+transform = LoadImage()
+results = transform(results)
+# At this point, the original image loaded is a `dict`
+# that contains the following attributes`:
+# - `img_path`: Absolute path of image
+# - `img`: Pixel points of the image
+# - `img_shape`: The shape of the image
+# - `ori_shape`: The original shape of the image
+
+# Perform diagonal flip transformation on the original image
+transform = RandomFlip(prob=1., direction='diagonal')
+results = transform(results)
+# At this point, the original image loaded is a `dict`
+# that contains the following attributes`:
+# - `img_path`: Absolute path of image
+# - `img`: Pixel points of the image
+# - `img_shape`: The shape of the image
+# - `ori_shape`: The original shape of the image
+# - `flip`: Is the image flipped and transformed
+# - `flip_direction`: The direction in which
+# the image is flipped and transformed
+
+# Get the image after flipping and transformation
+mmcv.imshow(results['img'])
+```
+
+For more information on using custom data transformations and enhancements, please refer to [$MMPose/test/test_datasets/test_transforms/test_common_transforms](https://github.com/open-mmlab/mmpose/blob/main/tests/test_datasets/test_transforms/test_common_transforms.py#L59)。
+
+#### RandomHalfBody
+
+The [RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L263) **data augmentation** algorithm probabilistically transforms the data of the upper or lower body.
+
+**Input**:
+
+- `min_total_keypoints` minimum total keypoints
+- `min_half_keypoints` minimum half-body keypoints
+- `padding` The filling ratio of the bbox
+- `prob` accepts the probability of half-body transformation when the number of key points meets the requirements
+
+**Output**:
+
+- Return a `dict` data after data transformation.
+
+#### Topdown Affine
+
+The [TopdownAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/topdown_transforms.py#L14) data transformation algorithm transforms the `original image` into an `input image` through affine transformation
+
+- `input_size` The bbox area will be cropped and corrected to the \[w,h\] size
+- `use_udp` whether to use fair data process [UDP](https://arxiv.org/abs/1911.07524).
+
+**Output**:
+
+- Return a `dict` data after data transformation.
+
+### Using Data Augmentation and Transformation in the Pipeline
+
+The **data augmentation** and **data transformation** process in the configuration file can be the following example:
+
+```python
+train_pipeline_stage2 = [
+ ...
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(
+ type='TopdownAffine',
+ input_size=codec['input_size']),
+ ...
+]
+```
+
+The pipeline in the example performs **data enhancement** on the `input data`, performs random horizontal transformation and half-body transformation, and performs `Top-Down` `Shift`, `Rotate`, and `Resize` operations, and implements affine transformation through `TopdownAffine` operations to transform to the `input_image_space`.
diff --git a/docs/en/advanced_guides/dataflow.md b/docs/en/advanced_guides/dataflow.md
new file mode 100644
index 0000000000000000000000000000000000000000..9f098b028dd78ee1a864064d598587bedef9b288
--- /dev/null
+++ b/docs/en/advanced_guides/dataflow.md
@@ -0,0 +1,3 @@
+# Dataflow in MMPose
+
+Coming soon.
diff --git a/docs/en/advanced_guides/implement_new_models.md b/docs/en/advanced_guides/implement_new_models.md
new file mode 100644
index 0000000000000000000000000000000000000000..7e73cfcbf452a69c6ed397d89cb963954f3f92a0
--- /dev/null
+++ b/docs/en/advanced_guides/implement_new_models.md
@@ -0,0 +1,164 @@
+# Implement New Models
+
+This tutorial will introduce how to implement your own models in MMPose. After summarizing, we split the need to implement new models into two categories:
+
+1. Based on the algorithm paradigm supported by MMPose, customize the modules (backbone, neck, head, codec, etc.) in the model
+2. Implement new algorithm paradigm
+
+## Basic Concepts
+
+What you want to implement is one of the above, and this section is important to you because it is the basic principle of building models in the OpenMMLab.
+
+In MMPose, all the code related to the implementation of the model structure is stored in the [models directory](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models) :
+
+```shell
+mmpose
+|----models
+ |----backbones #
+ |----data_preprocessors # image normalization
+ |----heads #
+ |----losses # loss functions
+ |----necks #
+ |----pose_estimators # algorithm paradigm
+ |----utils #
+```
+
+You can refer to the following flow chart to locate the module you need to implement:
+
+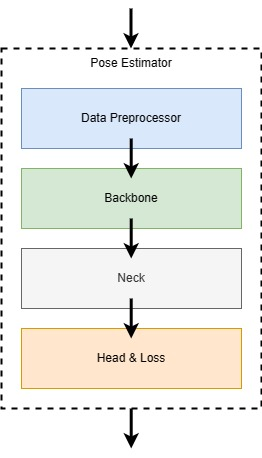
+
+## Pose Estimatiors
+
+In pose estimatiors, we will define the inference process of a model, and decode the model output results in `predict()`, first transform it from `output space` to `input image space` using the [codec](./codecs.md), and then combine the meta information to transform to `original image space`.
+
+
+
+Currently, MMPose supports the following types of pose estimator:
+
+1. [Top-down](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/topdown.py): The input of the pose model is a cropped single target (animal, human body, human face, human hand, plant, clothes, etc.) image, and the output is the key point prediction result of the target
+2. [Bottom-up](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/bottomup.py): The input of the pose model is an image containing any number of targets, and the output is the key point prediction result of all targets in the image
+3. [Pose Lifting](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/pose_lifter.py): The input of the pose model is a 2D keypoint coordinate array, and the output is a 3D keypoint coordinate array
+
+If the model you want to implement does not belong to the above algorithm paradigm, then you need to inherit the [BasePoseEstimator](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/base.py) class to define your own algorithm paradigm.
+
+## Backbones
+
+If you want to implement a new backbone network, you need to create a new file in the [backbones directory](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/backbones) to define it.
+
+The new backbone network needs to inherit the [BaseBackbone](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/backbones/base_backbone.py) class, and there is no difference in other aspects from inheriting `nn.Module` to create.
+
+After completing the implementation of the backbone network, you need to use `MODELS` to register it:
+
+```Python3
+from mmpose.registry import MODELS
+from .base_backbone import BaseBackbone
+
+
+@MODELS.register_module()
+class YourNewBackbone(BaseBackbone):
+```
+
+Finally, please remember to import your new backbone network in [\_\_init\_\_.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/backbones/__init__.py) .
+
+## Heads
+
+The addition of a new prediction head is similar to the backbone network process. You need to create a new file in the [heads directory](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/heads) to define it, and then inherit [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py) .
+
+One thing to note is that in MMPose, the loss function is calculated in the Head. According to the different training and evaluation stages, `loss()` and `predict()` are executed respectively.
+
+In `predict()`, the model will call the `decode()` method of the corresponding codec to transform the model output result from `output space` to `input image space`.
+
+After completing the implementation of the prediction head, you need to use `MODELS` to register it:
+
+```Python3
+from mmpose.registry import MODELS
+from ..base_head import BaseHead
+
+@MODELS.register_module()
+class YourNewHead(BaseHead):
+```
+
+Finally, please remember to import your new prediction head in [\_\_init\_\_.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/__init__.py).
+
+### Head with Keypoints Visibility Prediction
+
+Many models predict keypoint visibility based on confidence in coordinate predictions. However, this approach is suboptimal. Our [VisPredictHead](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/models/heads/hybrid_heads/vis_head.py) wrapper enables heads to directly predict keypoint visibility from ground truth training data, improving reliability. To add visibility prediction, wrap your head module with VisPredictHead in the config file.
+
+```python
+model=dict(
+ ...
+ head=dict(
+ type='VisPredictHead',
+ loss=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ use_sigmoid=True,
+ loss_weight=1e-3),
+ pose_cfg=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec)),
+ ...
+)
+```
+
+To implement such a head module wrapper, we only need to inherit [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py), then pass the pose head configuration in `__init__()` and instantiate it through `MODELS.build()`. As shown below:
+
+```python
+@MODELS.register_module()
+class VisPredictHead(BaseHead):
+ """VisPredictHead must be used together with other heads. It can predict
+ keypoints coordinates of and their visibility simultaneously. In the
+ current version, it only supports top-down approaches.
+
+ Args:
+ pose_cfg (Config): Config to construct keypoints prediction head
+ loss (Config): Config for visibility loss. Defaults to use
+ :class:`BCELoss`
+ use_sigmoid (bool): Whether to use sigmoid activation function
+ init_cfg (Config, optional): Config to control the initialization. See
+ :attr:`default_init_cfg` for default settings
+ """
+
+ def __init__(self,
+ pose_cfg: ConfigType,
+ loss: ConfigType = dict(
+ type='BCELoss', use_target_weight=False,
+ use_sigmoid=True),
+ init_cfg: OptConfigType = None):
+
+ if init_cfg is None:
+ init_cfg = self.default_init_cfg
+
+ super().__init__(init_cfg)
+
+ self.in_channels = pose_cfg['in_channels']
+ if pose_cfg.get('num_joints', None) is not None:
+ self.out_channels = pose_cfg['num_joints']
+ elif pose_cfg.get('out_channels', None) is not None:
+ self.out_channels = pose_cfg['out_channels']
+ else:
+ raise ValueError('VisPredictHead requires \'num_joints\' or'
+ ' \'out_channels\' in the pose_cfg.')
+
+ self.loss_module = MODELS.build(loss)
+
+ self.pose_head = MODELS.build(pose_cfg)
+ self.pose_cfg = pose_cfg
+
+ self.use_sigmoid = loss.get('use_sigmoid', False)
+
+ modules = [
+ nn.AdaptiveAvgPool2d(1),
+ nn.Flatten(),
+ nn.Linear(self.in_channels, self.out_channels)
+ ]
+ if self.use_sigmoid:
+ modules.append(nn.Sigmoid())
+
+ self.vis_head = nn.Sequential(*modules)
+```
+
+Then you can implement other parts of the code as a normal head.
diff --git a/docs/en/api.rst b/docs/en/api.rst
new file mode 100644
index 0000000000000000000000000000000000000000..48819a2531f7b21faea826f0ad519ecbcdabcd3e
--- /dev/null
+++ b/docs/en/api.rst
@@ -0,0 +1,134 @@
+mmpose.apis
+-------------
+.. automodule:: mmpose.apis
+ :members:
+
+mmpose.codecs
+-------------
+.. automodule:: mmpose.codecs
+ :members:
+
+mmpose.models
+---------------
+backbones
+^^^^^^^^^^^
+.. automodule:: mmpose.models.backbones
+ :members:
+
+necks
+^^^^^^^^^^^
+.. automodule:: mmpose.models.necks
+ :members:
+
+detectors
+^^^^^^^^^^^
+.. automodule:: mmpose.models.pose_estimators
+ :members:
+
+heads
+^^^^^^^^^^^^^^^
+.. automodule:: mmpose.models.heads
+ :members:
+
+losses
+^^^^^^^^^^^
+.. automodule:: mmpose.models.losses
+ :members:
+
+misc
+^^^^^^^^^^^
+.. automodule:: mmpose.models.utils
+ :members:
+
+mmpose.datasets
+-----------------
+.. automodule:: mmpose.datasets
+ :members:
+
+datasets
+^^^^^^^^^^^
+.. automodule:: mmpose.datasets.datasets.base
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.body
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.face
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.hand
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.animal
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.fashion
+ :members:
+ :noindex:
+
+transforms
+^^^^^^^^^^^
+.. automodule:: mmpose.datasets.transforms.loading
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.common_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.topdown_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.bottomup_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.formatting
+ :members:
+
+mmpose.structures
+---------------
+.. automodule:: mmpose.structures
+ :members:
+
+bbox
+^^^^^^^^^^^
+.. automodule:: mmpose.structures.bbox
+ :members:
+
+keypoint
+^^^^^^^^^^^
+.. automodule:: mmpose.structures.keypoint
+ :members:
+
+
+mmpose.registry
+---------------
+.. automodule:: mmpose.registry
+ :members:
+
+mmpose.evaluation
+-----------------
+metrics
+^^^^^^^^^^^
+.. automodule:: mmpose.evaluation.metrics
+ :members:
+
+functional
+^^^^^^^^^^^
+.. automodule:: mmpose.evaluation.functional
+ :members:
+
+mmpose.visualization
+--------------------
+.. automodule:: mmpose.visualization
+ :members:
+
+mmpose.engine
+---------------
+hooks
+^^^^^^^^^^^
+.. automodule:: mmpose.engine.hooks
+ :members:
diff --git a/docs/en/collect_modelzoo.py b/docs/en/collect_modelzoo.py
new file mode 100644
index 0000000000000000000000000000000000000000..0c87d3c6ef6d173772f3dc1d3753f4ad25235fd2
--- /dev/null
+++ b/docs/en/collect_modelzoo.py
@@ -0,0 +1,196 @@
+#!/usr/bin/env python
+# Copyright (c) OpenMMLab. All rights reserved.
+import os
+import os.path as osp
+import re
+from collections import defaultdict
+from glob import glob
+
+from addict import Addict
+from titlecase import titlecase
+
+
+def _get_model_docs():
+ """Get all model document files.
+
+ Returns:
+ list[str]: file paths
+ """
+ config_root = osp.join('..', '..', 'configs')
+ pattern = osp.sep.join(['*'] * 4) + '.md'
+ docs = glob(osp.join(config_root, pattern))
+ docs = [doc for doc in docs if '_base_' not in doc]
+ return docs
+
+
+def _parse_model_doc_path(path):
+ """Parse doc file path.
+
+ Typical path would be like:
+
+ configs/', '
', '', f'## {titlecase(dataset)} Dataset', + '' + ] + + for keywords, doc in keywords_dict.items(): + keyword_strs = [ + titlecase(x.replace('_', ' ')) for x in keywords + ] + dataset_str = titlecase(dataset) + if dataset_str in keyword_strs: + keyword_strs.remove(dataset_str) + + lines += [ + '
', '', + (f'### {" + ".join(keyword_strs)}' + f' on {dataset_str}'), '', doc['content'], '' + ] + + fn = osp.join('model_zoo', f'{task.replace(" ", "_").lower()}.md') + with open(fn, 'w', encoding='utf-8') as f: + f.write('\n'.join(lines)) + + # Write files by paper + paper_refs = _get_paper_refs() + + for paper_cat, paper_list in paper_refs.items(): + lines = [] + for paper_fn in paper_list: + paper_name, indicator = _parse_paper_ref(paper_fn) + paperlines = [] + for task, dataset_dict in model_docs.items(): + for dataset, keywords_dict in dataset_dict.items(): + for keywords, doc_info in keywords_dict.items(): + + if indicator not in doc_info['content']: + continue + + keyword_strs = [ + titlecase(x.replace('_', ' ')) for x in keywords + ] + + dataset_str = titlecase(dataset) + if dataset_str in keyword_strs: + keyword_strs.remove(dataset_str) + paperlines += [ + '
', '', + (f'### {" + ".join(keyword_strs)}' + f' on {dataset_str}'), '', doc_info['content'], '' + ] + if paperlines: + lines += ['
', '
', '', f'## {paper_name}', ''] + lines += paperlines + + if lines: + lines = [f'# {titlecase(paper_cat)}', ''] + lines + with open( + osp.join('model_zoo_papers', f'{paper_cat.lower()}.md'), + 'w', + encoding='utf-8') as f: + f.write('\n'.join(lines)) + + +if __name__ == '__main__': + print('collect model zoo documents') + main() diff --git a/docs/en/collect_projects.py b/docs/en/collect_projects.py new file mode 100644 index 0000000000000000000000000000000000000000..29c0449862ad4636474668d046ffd8c1152319c0 --- /dev/null +++ b/docs/en/collect_projects.py @@ -0,0 +1,116 @@ +#!/usr/bin/env python +# Copyright (c) OpenMMLab. All rights reserved. +import os +import os.path as osp +import re +from glob import glob + + +def _get_project_docs(): + """Get all project document files. + + Returns: + list[str]: file paths + """ + project_root = osp.join('..', '..', 'projects') + pattern = osp.sep.join(['*'] * 2) + '.md' + docs = glob(osp.join(project_root, pattern)) + docs = [ + doc for doc in docs + if 'example_project' not in doc and '_CN' not in doc + ] + return docs + + +def _parse_project_doc_path(fn): + """Get project name and banner from a project reference file. + + Returns: + tuple: + - project_name (str) + - project_banner (str) + """ + project_banner, project_name = None, None + with open(fn, 'r', encoding='utf-8') as f: + for line in f.readlines(): + if re.match('^( )*
', '' + ] + + project_intro_doc = _get_project_intro_doc() + faq_doc = _get_faq_doc() + + with open( + osp.join('projects', 'community_projects.md'), 'w', + encoding='utf-8') as f: + f.write('# Projects from Community Contributors\n') + f.write(''.join(project_intro_doc)) + f.write('\n'.join(project_lines)) + f.write(''.join(faq_doc)) + + +if __name__ == '__main__': + print('collect project documents') + main() diff --git a/docs/en/conf.py b/docs/en/conf.py new file mode 100644 index 0000000000000000000000000000000000000000..4359aa46e994fb19fd53559f8f07c53ef9633851 --- /dev/null +++ b/docs/en/conf.py @@ -0,0 +1,111 @@ +# Copyright (c) OpenMMLab. All rights reserved. +# Configuration file for the Sphinx documentation builder. +# +# This file only contains a selection of the most common options. For a full +# list see the documentation: +# https://www.sphinx-doc.org/en/master/usage/configuration.html + +# -- Path setup -------------------------------------------------------------- + +# If extensions (or modules to document with autodoc) are in another directory, +# add these directories to sys.path here. If the directory is relative to the +# documentation root, use os.path.abspath to make it absolute, like shown here. + +import os +import subprocess +import sys + +import pytorch_sphinx_theme + +sys.path.insert(0, os.path.abspath('../..')) + +# -- Project information ----------------------------------------------------- + +project = 'MMPose' +copyright = '2020-2021, OpenMMLab' +author = 'MMPose Authors' + +# The full version, including alpha/beta/rc tags +version_file = '../../mmpose/version.py' + + +def get_version(): + with open(version_file, 'r') as f: + exec(compile(f.read(), version_file, 'exec')) + return locals()['__version__'] + + +release = get_version() + +# -- General configuration --------------------------------------------------- + +# Add any Sphinx extension module names here, as strings. They can be +# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom +# ones. +extensions = [ + 'sphinx.ext.autodoc', 'sphinx.ext.napoleon', 'sphinx.ext.viewcode', + 'sphinx_markdown_tables', 'sphinx_copybutton', 'myst_parser', + 'sphinx.ext.autosummary' +] + +autodoc_mock_imports = ['json_tricks', 'mmpose.version'] + +# Ignore >>> when copying code +copybutton_prompt_text = r'>>> |\.\.\. ' +copybutton_prompt_is_regexp = True + +# Add any paths that contain templates here, relative to this directory. +templates_path = ['_templates'] + +# List of patterns, relative to source directory, that match files and +# directories to ignore when looking for source files. +# This pattern also affects html_static_path and html_extra_path. +exclude_patterns = ['_build', 'Thumbs.db', '.DS_Store'] + +# -- Options for HTML output ------------------------------------------------- +source_suffix = { + '.rst': 'restructuredtext', + '.md': 'markdown', +} + +# The theme to use for HTML and HTML Help pages. See the documentation for +# a list of builtin themes. +# +html_theme = 'pytorch_sphinx_theme' +html_theme_path = [pytorch_sphinx_theme.get_html_theme_path()] +html_theme_options = { + 'menu': [ + { + 'name': 'GitHub', + 'url': 'https://github.com/open-mmlab/mmpose/tree/main' + }, + ], + # Specify the language of the shared menu + 'menu_lang': + 'en' +} + +# Add any paths that contain custom static files (such as style sheets) here, +# relative to this directory. They are copied after the builtin static files, +# so a file named "default.css" will overwrite the builtin "default.css". + +language = 'en' + +html_static_path = ['_static'] +html_css_files = ['css/readthedocs.css'] + +# Enable ::: for my_st +myst_enable_extensions = ['colon_fence'] + +master_doc = 'index' + + +def builder_inited_handler(app): + subprocess.run(['python', './collect_modelzoo.py']) + subprocess.run(['python', './collect_projects.py']) + subprocess.run(['sh', './merge_docs.sh']) + subprocess.run(['python', './stats.py']) + + +def setup(app): + app.connect('builder-inited', builder_inited_handler) diff --git a/docs/en/contribution_guide.md b/docs/en/contribution_guide.md new file mode 100644 index 0000000000000000000000000000000000000000..525ca9a7e1992c35a223afd9769ef188795c1702 --- /dev/null +++ b/docs/en/contribution_guide.md @@ -0,0 +1,191 @@ +# How to Contribute to MMPose + +Welcome to join the MMPose community, we are committed to building cutting-edge computer vision foundational library. All kinds of contributions are welcomed, including but not limited to: + +- **Fix bugs** + 1. If the modification involves significant changes, it's recommended to create an issue first that describes the error information and how to trigger the bug. Other developers will discuss it with you and propose a proper solution. + 2. Fix the bug and add the corresponding unit test, submit the PR. +- **Add new features or components** + 1. If the new feature or module involves a large amount of code changes, we suggest you to submit an issue first, and we will confirm the necessity of the function with you. + 2. Implement the new feature and add unit tests, submit the PR. +- **Improve documentation or translation** + - If you find errors or incomplete documentation, please submit a PR directly. + +```{note} +- If you hope to contribute to MMPose 1.0, please create a new branch from dev-1.x and submit a PR to the dev-1.x branch. +- If you are the author of papers in this field and would like to include your work to MMPose, please contact us. We will much appreciate your contribution. +- If you hope to share your MMPose-based projects with the community at once, consider creating a PR to `Projects` directory, which will simplify the review process and bring in the projects as soon as possible. Checkout our [example project](/projects/example_project) +- If you wish to join the MMPose developers, please feel free to contact us and we will invite you to join the MMPose developers group. +``` + +## Preparation + +The commands for processing pull requests are implemented using Git, and this chapter details Git Configuration and associated GitHub. + +### Git Configuration + +First, you need to install Git and configure your Git username and email. + +```shell +# view the Git version +git --version +``` + +Second, check your Git config and ensure that `user.name` and `user.email` are properly configured. + +```shell +# view the Git config +git config --global --list +# configure the user name and email +git config --global user.name "Change your user name here" +git config --global user.email "Change your user email here" +``` + +## Pull Request Workflow + +If you’re not familiar with Pull Request, don’t worry! The following guidance will tell you how to create a Pull Request step by step. If you want to dive into the development mode of Pull Request, you can refer to the [official documents](https://docs.github.com/en/github/collaborating-with-issues-and-pull-requests/about-pull-requests). + +### 1. Fork and Clone + +If you are posting a pull request for the first time, you should fork the OpenMMLab repositories by clicking the **Fork** button in the top right corner of the GitHub page, and the forked repositories will appear under your GitHub profile. + + + +Then you need to clone the forked repository to your local machine. + +```shell +# clone the forked repository +git clone https://github.com/username/mmpose.git + +# Add official repository as upstream remote +cd mmpose +git remote add upstream https://github.com/open-mmlab/mmpose.git +``` + +Enter the following command in the terminal to see if the remote repository was successfully added. + +```shell +git remote -v +``` + +If the following message appears, you have successfully added a remote repository. + +```Shell +origin https://github.com/{username}/mmpose.git (fetch) +origin https://github.com/{username}/mmpose.git (push) +upstream https://github.com/open-mmlab/mmpose.git (fetch) +upstream https://github.com/open-mmlab/mmpose.git (push) +``` + +```{note} +Here’s a brief introduction to the origin and upstream. When we use “git clone”, we create an “origin” remote by default, which points to the repository cloned from. As for “upstream”, we add it ourselves to point to the target repository. Of course, if you don’t like the name “upstream”, you could name it as you wish. Usually, we’ll push the code to “origin”. If the pushed code conflicts with the latest code in official(“upstream”), we should pull the latest code from upstream to resolve the conflicts, and then push to “origin” again. The posted Pull Request will be updated automatically. +``` + +### 2. Configure pre-commit + +You should configure pre-commit in the local development environment to make sure the code style matches that of OpenMMLab. Note: The following code should be executed under the MMPOSE directory. + +```Shell +pip install -U pre-commit +pre-commit install +``` + +Check that pre-commit is configured successfully, and install the hooks defined in `.pre-commit-config.yaml`. + +```Shell +pre-commit run --all-files +``` + + + +```{note} +Chinese users may fail to download the pre-commit hooks due to the network issue. In this case, you could download these hooks from: + +pip install -U pre-commit -i https://pypi.tuna.tsinghua.edu.cn/simple + +or: + +pip install -U pre-commit -i https://pypi.mirrors.ustc.edu.cn/simple +``` + +If the installation process is interrupted, you can repeatedly run `pre-commit run ...` to continue the installation. + +If the code does not conform to the code style specification, pre-commit will raise a warning and fixes some of the errors automatically. + + + +### 3. Create a development branch + +After configuring the pre-commit, we should create a branch based on the dev branch to develop the new feature or fix the bug. The proposed branch name is `username/pr_name`. + +```Shell +git checkout -b username/refactor_contributing_doc +``` + +In subsequent development, if the dev branch of the local repository lags behind the dev branch of the official repository, you need to pull the upstream dev branch first and then rebase it to the local development branch. + +```Shell +git checkout username/refactor_contributing_doc +git fetch upstream +git rebase upstream/dev-1.x +``` + +When rebasing, if a conflict arises, you need to resolve the conflict manually, then execute the `git add` command, and then execute the `git rebase --continue` command until the rebase is complete. + +### 4. Commit the code and pass the unit test + +After the local development is done, we need to pass the unit tests locally and then commit the code. + +```shell +# run unit test +pytest tests/ + +# commit the code +git add . +git commit -m "commit message" +``` + +### 5. Push the code to the remote repository + +After the local development is done, we need to push the code to the remote repository. + +```Shell +git push origin username/refactor_contributing_doc +``` + +### 6. Create a Pull Request + +#### (1) Create a Pull Request on GitHub + + + +#### (2) Fill in the Pull Request template + + + +## Code Style + +### Python + +We adopt [PEP8](https://www.python.org/dev/peps/pep-0008/) as the preferred code style, and use the following tools for linting and formatting: + +- [flake8](https://github.com/PyCQA/flake8): A wrapper around some linter tools. +- [isort](https://github.com/timothycrosley/isort): A Python utility to sort imports. +- [yapf](https://github.com/google/yapf): A formatter for Python files. +- [codespell](https://github.com/codespell-project/codespell): A Python utility to fix common misspellings in text files. +- [mdformat](https://github.com/executablebooks/mdformat): Mdformat is an opinionated Markdown formatter that can be used to enforce a consistent style in Markdown files. +- [docformatter](https://github.com/myint/docformatter): A formatter to format docstring. + +Style configurations of yapf and isort can be found in [setup.cfg](/setup.cfg). + +We use [pre-commit hook](https://pre-commit.com/) that checks and formats for `flake8`, `yapf`, `isort`, `trailing whitespaces`, `markdown files`, +fixes `end-of-files`, `double-quoted-strings`, `python-encoding-pragma`, `mixed-line-ending`, sorts `requirments.txt` automatically on every commit. +The config for a pre-commit hook is stored in [.pre-commit-config](/.pre-commit-config.yaml). + +```{note} +Before you create a PR, make sure that your code lints and is formatted by yapf. +``` + +### C++ and CUDA + +We follow the [Google C++ Style Guide](https://google.github.io/styleguide/cppguide.html). diff --git a/docs/en/dataset_zoo/2d_animal_keypoint.md b/docs/en/dataset_zoo/2d_animal_keypoint.md new file mode 100644 index 0000000000000000000000000000000000000000..9ef6022ecc1205a93a9db7abd36660f722d7b79a --- /dev/null +++ b/docs/en/dataset_zoo/2d_animal_keypoint.md @@ -0,0 +1,535 @@ +# 2D Animal Keypoint Dataset + +It is recommended to symlink the dataset root to `$MMPOSE/data`. +If your folder structure is different, you may need to change the corresponding paths in config files. + +MMPose supported datasets: + +- [Animal-Pose](#animal-pose) \[ [Homepage](https://sites.google.com/view/animal-pose/) \] +- [AP-10K](#ap-10k) \[ [Homepage](https://github.com/AlexTheBad/AP-10K/) \] +- [Horse-10](#horse-10) \[ [Homepage](http://www.mackenziemathislab.org/horse10) \] +- [MacaquePose](#macaquepose) \[ [Homepage](http://pri.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html) \] +- [Vinegar Fly](#vinegar-fly) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [Desert Locust](#desert-locust) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [Grévy’s Zebra](#grvys-zebra) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [ATRW](#atrw) \[ [Homepage](https://cvwc2019.github.io/challenge.html) \] +- [Animal Kingdom](#Animal-Kindom) \[ [Homepage](https://openaccess.thecvf.com/content/CVPR2022/html/Ng_Animal_Kingdom_A_Large_and_Diverse_Dataset_for_Animal_Behavior_CVPR_2022_paper.html) \] + +## Animal-Pose + + + +
+
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+  +
+
+
+For [Animal-Pose](https://sites.google.com/view/animal-pose/) dataset, we prepare the dataset as follows:
+
+1. Download the images of [PASCAL VOC2012](http://host.robots.ox.ac.uk/pascal/VOC/voc2012/#data), especially the five categories (dog, cat, sheep, cow, horse), which we use as trainval dataset.
+2. Download the [test-set](https://drive.google.com/drive/folders/1DwhQobZlGntOXxdm7vQsE4bqbFmN3b9y?usp=sharing) images with raw annotations (1000 images, 5 categories).
+3. We have pre-processed the annotations to make it compatible with MMPose. Please download the annotation files from [annotations](https://download.openmmlab.com/mmpose/datasets/animalpose_annotations.tar). If you would like to generate the annotations by yourself, please check our dataset parsing [codes](/tools/dataset_converters/parse_animalpose_dataset.py).
+
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── animalpose
+ │
+ │-- VOC2012
+ │ │-- Annotations
+ │ │-- ImageSets
+ │ │-- JPEGImages
+ │ │-- SegmentationClass
+ │ │-- SegmentationObject
+ │
+ │-- animalpose_image_part2
+ │ │-- cat
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annotations
+ │ │-- animalpose_train.json
+ │ |-- animalpose_val.json
+ │ |-- animalpose_trainval.json
+ │ │-- animalpose_test.json
+ │
+ │-- PASCAL2011_animal_annotation
+ │ │-- cat
+ │ │ |-- 2007_000528_1.xml
+ │ │ |-- 2007_000549_1.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annimalpose_anno2
+ │ │-- cat
+ │ │ |-- ca1.xml
+ │ │ |-- ca2.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+```
+
+The official dataset does not provide the official train/val/test set split.
+We choose the images from PascalVOC for train & val. In total, we have 3608 images and 5117 annotations for train+val, where
+2798 images with 4000 annotations are used for training, and 810 images with 1117 annotations are used for validation.
+Those images from other sources (1000 images with 1000 annotations) are used for testing.
+
+## AP-10K
+
+
+
+
+
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+  +
+
+
+For [AP-10K](https://github.com/AlexTheBad/AP-10K/) dataset, images and annotations can be downloaded from [download](https://drive.google.com/file/d/1-FNNGcdtAQRehYYkGY1y4wzFNg4iWNad/view?usp=sharing).
+Note, this data and annotation data is for non-commercial use only.
+
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ap10k
+ │-- annotations
+ │ │-- ap10k-train-split1.json
+ │ |-- ap10k-train-split2.json
+ │ |-- ap10k-train-split3.json
+ │ │-- ap10k-val-split1.json
+ │ |-- ap10k-val-split2.json
+ │ |-- ap10k-val-split3.json
+ │ |-- ap10k-test-split1.json
+ │ |-- ap10k-test-split2.json
+ │ |-- ap10k-test-split3.json
+ │-- data
+ │ │-- 000000000001.jpg
+ │ │-- 000000000002.jpg
+ │ │-- ...
+```
+
+The annotation files in 'annotation' folder contains 50 labeled animal species. There are total 10,015 labeled images with 13,028 instances in the AP-10K dataset. We randonly split them into train, val, and test set following the ratio of 7:1:2.
+
+## Horse-10
+
+
+
+
+
+
+
+Horse-10 (WACV'2021)
+ +```bibtex +@inproceedings{mathis2021pretraining, + title={Pretraining boosts out-of-domain robustness for pose estimation}, + author={Mathis, Alexander and Biasi, Thomas and Schneider, Steffen and Yuksekgonul, Mert and Rogers, Byron and Bethge, Matthias and Mathis, Mackenzie W}, + booktitle={Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision}, + pages={1859--1868}, + year={2021} +} +``` + +
+  +
+
+
+For [Horse-10](http://www.mackenziemathislab.org/horse10) dataset, images can be downloaded from [download](http://www.mackenziemathislab.org/horse10).
+Please download the annotation files from [horse10_annotations](https://download.openmmlab.com/mmpose/datasets/horse10_annotations.tar). Note, this data and annotation data is for non-commercial use only, per the authors (see http://horse10.deeplabcut.org for more information).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── horse10
+ │-- annotations
+ │ │-- horse10-train-split1.json
+ │ |-- horse10-train-split2.json
+ │ |-- horse10-train-split3.json
+ │ │-- horse10-test-split1.json
+ │ |-- horse10-test-split2.json
+ │ |-- horse10-test-split3.json
+ │-- labeled-data
+ │ │-- BrownHorseinShadow
+ │ │-- BrownHorseintoshadow
+ │ │-- ...
+```
+
+## MacaquePose
+
+
+
+
+
+
+
+MacaquePose (bioRxiv'2020)
+ +```bibtex +@article{labuguen2020macaquepose, + title={MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture}, + author={Labuguen, Rollyn and Matsumoto, Jumpei and Negrete, Salvador and Nishimaru, Hiroshi and Nishijo, Hisao and Takada, Masahiko and Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro}, + journal={bioRxiv}, + year={2020}, + publisher={Cold Spring Harbor Laboratory} +} +``` + +
+  +
+
+
+For [MacaquePose](http://pri.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html) dataset, images can be downloaded from [download](http://pri.ehub.kyoto-u.ac.jp/datasets/macaquepose/download.php).
+Please download the annotation files from [macaque_annotations](https://download.openmmlab.com/mmpose/datasets/macaque_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── macaque
+ │-- annotations
+ │ │-- macaque_train.json
+ │ |-- macaque_test.json
+ │-- images
+ │ │-- 01418849d54b3005.jpg
+ │ │-- 0142d1d1a6904a70.jpg
+ │ │-- 01ef2c4c260321b7.jpg
+ │ │-- 020a1c75c8c85238.jpg
+ │ │-- 020b1506eef2557d.jpg
+ │ │-- ...
+```
+
+Since the official dataset does not provide the test set, we randomly select 12500 images for training, and the rest for evaluation (see [code](/tools/dataset/parse_macaquepose_dataset.py)).
+
+## Vinegar Fly
+
+
+
+
+
+
+
+Vinegar Fly (Nature Methods'2019)
+ +```bibtex +@article{pereira2019fast, + title={Fast animal pose estimation using deep neural networks}, + author={Pereira, Talmo D and Aldarondo, Diego E and Willmore, Lindsay and Kislin, Mikhail and Wang, Samuel S-H and Murthy, Mala and Shaevitz, Joshua W}, + journal={Nature methods}, + volume={16}, + number={1}, + pages={117--125}, + year={2019}, + publisher={Nature Publishing Group} +} +``` + +
+  +
+
+
+For [Vinegar Fly](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [vinegar_fly_images](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_images.tar).
+Please download the annotation files from [vinegar_fly_annotations](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── fly
+ │-- annotations
+ │ │-- fly_train.json
+ │ |-- fly_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## Desert Locust
+
+
+
+
+
+
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+  +
+
+
+For [Desert Locust](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [locust_images](https://download.openmmlab.com/mmpose/datasets/locust_images.tar).
+Please download the annotation files from [locust_annotations](https://download.openmmlab.com/mmpose/datasets/locust_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── locust
+ │-- annotations
+ │ │-- locust_train.json
+ │ |-- locust_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## Grévy’s Zebra
+
+
+
+
+
+
+
+Grévy’s Zebra (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+  +
+
+For [Grévy’s Zebra](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [zebra_images](https://download.openmmlab.com/mmpose/datasets/zebra_images.tar).
+Please download the annotation files from [zebra_annotations](https://download.openmmlab.com/mmpose/datasets/zebra_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── zebra
+ │-- annotations
+ │ │-- zebra_train.json
+ │ |-- zebra_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## ATRW
+
+
+
+
+
+
+
+ATRW (ACM MM'2020)
+ +```bibtex +@inproceedings{li2020atrw, + title={ATRW: A Benchmark for Amur Tiger Re-identification in the Wild}, + author={Li, Shuyuan and Li, Jianguo and Tang, Hanlin and Qian, Rui and Lin, Weiyao}, + booktitle={Proceedings of the 28th ACM International Conference on Multimedia}, + pages={2590--2598}, + year={2020} +} +``` + +
+  +
+
+ATRW captures images of the Amur tiger (also known as Siberian tiger, Northeast-China tiger) in the wild.
+For [ATRW](https://cvwc2019.github.io/challenge.html) dataset, please download images from
+[Pose_train](https://lilablobssc.blob.core.windows.net/cvwc2019/train/atrw_pose_train.tar.gz),
+[Pose_val](https://lilablobssc.blob.core.windows.net/cvwc2019/train/atrw_pose_val.tar.gz), and
+[Pose_test](https://lilablobssc.blob.core.windows.net/cvwc2019/test/atrw_pose_test.tar.gz).
+Note that in the ATRW official annotation files, the key "file_name" is written as "filename". To make it compatible with
+other coco-type json files, we have modified this key.
+Please download the modified annotation files from [atrw_annotations](https://download.openmmlab.com/mmpose/datasets/atrw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── atrw
+ │-- annotations
+ │ │-- keypoint_train.json
+ │ │-- keypoint_val.json
+ │ │-- keypoint_trainval.json
+ │-- images
+ │ │-- train
+ │ │ │-- 000002.jpg
+ │ │ │-- 000003.jpg
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000001.jpg
+ │ │ │-- 000013.jpg
+ │ │ │-- ...
+ │ │-- test
+ │ │ │-- 000000.jpg
+ │ │ │-- 000004.jpg
+ │ │ │-- ...
+```
+
+## Animal Kingdom
+
+
+
+
+  +
+
+
+```bibtex
+@inproceedings{Ng_2022_CVPR,
+ author = {Ng, Xun Long and Ong, Kian Eng and Zheng, Qichen and Ni, Yun and Yeo, Si Yong and Liu, Jun},
+ title = {Animal Kingdom: A Large and Diverse Dataset for Animal Behavior Understanding},
+ booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
+ month = {June},
+ year = {2022},
+ pages = {19023-19034}
+ }
+```
+
+For [Animal Kingdom](https://github.com/sutdcv/Animal-Kingdom) dataset, images can be downloaded from [here](https://forms.office.com/pages/responsepage.aspx?id=drd2NJDpck-5UGJImDFiPVRYpnTEMixKqPJ1FxwK6VZUQkNTSkRISTNORUI2TDBWMUpZTlQ5WUlaSyQlQCN0PWcu).
+Please Extract dataset under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ak
+ |--annotations
+ │ │-- ak_P1
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P2
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_amphibian
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_bird
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_fish
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_mammal
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_reptile
+ │ │-- train.json
+ │ │-- test.json
+ │-- images
+ │ │-- AAACXZTV
+ │ │ │--AAACXZTV_f000059.jpg
+ │ │ │--...
+ │ │-- AAAUILHH
+ │ │ │--AAAUILHH_f000098.jpg
+ │ │ │--...
+ │ │-- ...
+```
diff --git a/docs/en/dataset_zoo/2d_body_keypoint.md b/docs/en/dataset_zoo/2d_body_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..c3104644f744f209b35d963567119b2d13e6c0f9
--- /dev/null
+++ b/docs/en/dataset_zoo/2d_body_keypoint.md
@@ -0,0 +1,637 @@
+# 2D Body Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- Images
+ - [COCO](#coco) \[ [Homepage](http://cocodataset.org/) \]
+ - [MPII](#mpii) \[ [Homepage](http://human-pose.mpi-inf.mpg.de/) \]
+ - [MPII-TRB](#mpii-trb) \[ [Homepage](https://github.com/kennymckormick/Triplet-Representation-of-human-Body) \]
+ - [AI Challenger](#aic) \[ [Homepage](https://github.com/AIChallenger/AI_Challenger_2017) \]
+ - [CrowdPose](#crowdpose) \[ [Homepage](https://github.com/Jeff-sjtu/CrowdPose) \]
+ - [OCHuman](#ochuman) \[ [Homepage](https://github.com/liruilong940607/OCHumanApi) \]
+ - [MHP](#mhp) \[ [Homepage](https://lv-mhp.github.io/dataset) \]
+ - [Human-Art](#humanart) \[ [Homepage](https://idea-research.github.io/HumanArt/) \]
+ - [ExLPose](#exlpose-dataset) \[ [Homepage](http://cg.postech.ac.kr/research/ExLPose/) \]
+- Videos
+ - [PoseTrack18](#posetrack18) \[ [Homepage](https://posetrack.net/users/download.php) \]
+ - [sub-JHMDB](#sub-jhmdb-dataset) \[ [Homepage](http://jhmdb.is.tue.mpg.de/dataset) \]
+
+## COCO
+
+
+
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+  +
+
+
+For [COCO](http://cocodataset.org/) data, please download from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+[HRNet-Human-Pose-Estimation](https://github.com/HRNet/HRNet-Human-Pose-Estimation) provides person detection result of COCO val2017 to reproduce our multi-person pose estimation results.
+Please download from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Optionally, to evaluate on COCO'2017 test-dev, please download the [image-info](https://download.openmmlab.com/mmpose/datasets/person_keypoints_test-dev-2017.json).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- person_keypoints_train2017.json
+ │ |-- person_keypoints_val2017.json
+ │ |-- person_keypoints_test-dev-2017.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ | |-- COCO_test-dev2017_detections_AP_H_609_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+## MPII
+
+
+
+
+
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+  +
+
+
+For [MPII](http://human-pose.mpi-inf.mpg.de/) data, please download from [MPII Human Pose Dataset](http://human-pose.mpi-inf.mpg.de/).
+We have converted the original annotation files into json format, please download them from [mpii_annotations](https://download.openmmlab.com/mmpose/datasets/mpii_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mpii
+ |── annotations
+ | |── mpii_gt_val.mat
+ | |── mpii_test.json
+ | |── mpii_train.json
+ | |── mpii_trainval.json
+ | `── mpii_val.json
+ `── images
+ |── 000001163.jpg
+ |── 000003072.jpg
+
+```
+
+During training and inference, the prediction result will be saved as '.mat' format by default. We also provide a tool to convert this '.mat' to more readable '.json' format.
+
+```shell
+python tools/dataset/mat2json ${PRED_MAT_FILE} ${GT_JSON_FILE} ${OUTPUT_PRED_JSON_FILE}
+```
+
+For example,
+
+```shell
+python tools/dataset/mat2json work_dirs/res50_mpii_256x256/pred.mat data/mpii/annotations/mpii_val.json pred.json
+```
+
+## MPII-TRB
+
+
+
+
+
+
+
+MPII-TRB (ICCV'2019)
+ +```bibtex +@inproceedings{duan2019trb, + title={TRB: A Novel Triplet Representation for Understanding 2D Human Body}, + author={Duan, Haodong and Lin, Kwan-Yee and Jin, Sheng and Liu, Wentao and Qian, Chen and Ouyang, Wanli}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={9479--9488}, + year={2019} +} +``` + +
+  +
+
+
+For [MPII-TRB](https://github.com/kennymckormick/Triplet-Representation-of-human-Body) data, please download from [MPII Human Pose Dataset](http://human-pose.mpi-inf.mpg.de/).
+Please download the annotation files from [mpii_trb_annotations](https://download.openmmlab.com/mmpose/datasets/mpii_trb_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mpii
+ |── annotations
+ | |── mpii_trb_train.json
+ | |── mpii_trb_val.json
+ `── images
+ |── 000001163.jpg
+ |── 000003072.jpg
+
+```
+
+## AIC
+
+
+
+
+
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+  +
+
+
+For [AIC](https://github.com/AIChallenger/AI_Challenger_2017) data, please download from [AI Challenger 2017](https://github.com/AIChallenger/AI_Challenger_2017), 2017 Train/Val is needed for keypoints training and validation.
+Please download the annotation files from [aic_annotations](https://download.openmmlab.com/mmpose/datasets/aic_annotations.tar).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── aic
+ │-- annotations
+ │ │-- aic_train.json
+ │ |-- aic_val.json
+ │-- ai_challenger_keypoint_train_20170902
+ │ │-- keypoint_train_images_20170902
+ │ │ │-- 0000252aea98840a550dac9a78c476ecb9f47ffa.jpg
+ │ │ │-- 000050f770985ac9653198495ef9b5c82435d49c.jpg
+ │ │ │-- ...
+ `-- ai_challenger_keypoint_validation_20170911
+ │-- keypoint_validation_images_20170911
+ │-- 0002605c53fb92109a3f2de4fc3ce06425c3b61f.jpg
+ │-- 0003b55a2c991223e6d8b4b820045bd49507bf6d.jpg
+ │-- ...
+```
+
+## CrowdPose
+
+
+
+
+
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+  +
+
+
+For [CrowdPose](https://github.com/Jeff-sjtu/CrowdPose) data, please download from [CrowdPose](https://github.com/Jeff-sjtu/CrowdPose).
+Please download the annotation files and human detection results from [crowdpose_annotations](https://download.openmmlab.com/mmpose/datasets/crowdpose_annotations.tar).
+For top-down approaches, we follow [CrowdPose](https://arxiv.org/abs/1812.00324) to use the [pre-trained weights](https://pjreddie.com/media/files/yolov3.weights) of [YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) to generate the detected human bounding boxes.
+For model training, we follow [HigherHRNet](https://github.com/HRNet/HigherHRNet-Human-Pose-Estimation) to train models on CrowdPose train/val dataset, and evaluate models on CrowdPose test dataset.
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── crowdpose
+ │-- annotations
+ │ │-- mmpose_crowdpose_train.json
+ │ │-- mmpose_crowdpose_val.json
+ │ │-- mmpose_crowdpose_trainval.json
+ │ │-- mmpose_crowdpose_test.json
+ │ │-- det_for_crowd_test_0.1_0.5.json
+ │-- images
+ │-- 100000.jpg
+ │-- 100001.jpg
+ │-- 100002.jpg
+ │-- ...
+```
+
+## OCHuman
+
+
+
+
+
+
+
+OCHuman (CVPR'2019)
+ +```bibtex +@inproceedings{zhang2019pose2seg, + title={Pose2seg: Detection free human instance segmentation}, + author={Zhang, Song-Hai and Li, Ruilong and Dong, Xin and Rosin, Paul and Cai, Zixi and Han, Xi and Yang, Dingcheng and Huang, Haozhi and Hu, Shi-Min}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={889--898}, + year={2019} +} +``` + +
+
+
+
+For [OCHuman](https://github.com/liruilong940607/OCHumanApi) data, please download the images and annotations from [OCHuman](https://github.com/liruilong940607/OCHumanApi),
+Move them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ochuman
+ │-- annotations
+ │ │-- ochuman_coco_format_val_range_0.00_1.00.json
+ │ |-- ochuman_coco_format_test_range_0.00_1.00.json
+ |-- images
+ │-- 000001.jpg
+ │-- 000002.jpg
+ │-- 000003.jpg
+ │-- ...
+
+```
+
+## MHP
+
+
+
+
+
+
+
+MHP (ACM MM'2018)
+ +```bibtex +@inproceedings{zhao2018understanding, + title={Understanding humans in crowded scenes: Deep nested adversarial learning and a new benchmark for multi-human parsing}, + author={Zhao, Jian and Li, Jianshu and Cheng, Yu and Sim, Terence and Yan, Shuicheng and Feng, Jiashi}, + booktitle={Proceedings of the 26th ACM international conference on Multimedia}, + pages={792--800}, + year={2018} +} +``` + +
+  +
+
+
+For [MHP](https://lv-mhp.github.io/dataset) data, please download from [MHP](https://lv-mhp.github.io/dataset).
+Please download the annotation files from [mhp_annotations](https://download.openmmlab.com/mmpose/datasets/mhp_annotations.tar.gz).
+Please download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mhp
+ │-- annotations
+ │ │-- mhp_train.json
+ │ │-- mhp_val.json
+ │
+ `-- train
+ │ │-- images
+ │ │ │-- 1004.jpg
+ │ │ │-- 10050.jpg
+ │ │ │-- ...
+ │
+ `-- val
+ │ │-- images
+ │ │ │-- 10059.jpg
+ │ │ │-- 10068.jpg
+ │ │ │-- ...
+ │
+ `-- test
+ │ │-- images
+ │ │ │-- 1005.jpg
+ │ │ │-- 10052.jpg
+ │ │ │-- ...~~~~
+```
+
+## Human-Art dataset
+
+
+
+
+
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
+
+
+For [Human-Art](https://idea-research.github.io/HumanArt/) data, please download the images and annotation files from [its website](https://idea-research.github.io/HumanArt/). You need to fill in the [data form](https://docs.google.com/forms/d/e/1FAIpQLScroT_jvw6B9U2Qca1_cl5Kmmu1ceKtlh6DJNmWLte8xNEhEw/viewform) to get access to the data.
+Move them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+|── data
+ │── HumanArt
+ │-- images
+ │ │-- 2D_virtual_human
+ │ │ |-- cartoon
+ │ │ | |-- 000000000000.jpg
+ │ │ | |-- ...
+ │ │ |-- digital_art
+ │ │ |-- ...
+ │ |-- 3D_virtual_human
+ │ |-- real_human
+ |-- annotations
+ │ │-- validation_humanart.json
+ │ │-- training_humanart_coco.json
+ |-- person_detection_results
+ │ │-- HumanArt_validation_detections_AP_H_56_person.json
+```
+
+You can choose whether to download other annotation files in Human-Art. If you want to use additional annotation files (e.g. validation set of cartoon), you need to edit the corresponding code in config file.
+
+## ExLPose dataset
+
+
+
+
+
+
+
+ExLPose (2023)
+ +```bibtex +@inproceedings{ExLPose_2023_CVPR, + title={Human Pose Estimation in Extremely Low-Light Conditions}, + author={Sohyun Lee, Jaesung Rim, Boseung Jeong, Geonu Kim, ByungJu Woo, Haechan Lee, Sunghyun Cho, Suha Kwak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + year={2023} +} +``` + +
+  +
+
+
+For [ExLPose](http://cg.postech.ac.kr/research/ExLPose/) data, please download from [ExLPose](https://drive.google.com/drive/folders/1E0Is4_cShxvsbJlep_aNEYLJpmHzq9FL),
+Move them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ExLPose
+ │-- annotations
+ | |-- ExLPose
+ │ |-- ExLPose_train_LL.json
+ │ |-- ExLPose_test_LL-A.json
+ │ |-- ExLPose_test_LL-E.json
+ │ |-- ExLPose_test_LL-H.json
+ │ |-- ExLPose_test_LL-N.json
+ |-- dark
+ |--00001.png
+ |--00002.png
+ |--...
+
+```
+
+## PoseTrack18
+
+
+
+
+
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+  +
+
+
+For [PoseTrack18](https://posetrack.net/users/download.php) data, please download from [PoseTrack18](https://posetrack.net/users/download.php).
+Please download the annotation files from [posetrack18_annotations](https://download.openmmlab.com/mmpose/datasets/posetrack18_annotations.tar).
+We have merged the video-wise separated official annotation files into two json files (posetrack18_train & posetrack18_val.json). We also generate the [mask files](https://download.openmmlab.com/mmpose/datasets/posetrack18_mask.tar) to speed up training.
+For top-down approaches, we use [MMDetection](https://github.com/open-mmlab/mmdetection) pre-trained [Cascade R-CNN](https://download.openmmlab.com/mmdetection/v2.0/cascade_rcnn/cascade_rcnn_x101_64x4d_fpn_20e_coco/cascade_rcnn_x101_64x4d_fpn_20e_coco_20200509_224357-051557b1.pth) (X-101-64x4d-FPN) to generate the detected human bounding boxes.
+Please download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── posetrack18
+ │-- annotations
+ │ │-- posetrack18_train.json
+ │ │-- posetrack18_val.json
+ │ │-- posetrack18_val_human_detections.json
+ │ │-- train
+ │ │ │-- 000001_bonn_train.json
+ │ │ │-- 000002_bonn_train.json
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000342_mpii_test.json
+ │ │ │-- 000522_mpii_test.json
+ │ │ │-- ...
+ │ `-- test
+ │ │-- 000001_mpiinew_test.json
+ │ │-- 000002_mpiinew_test.json
+ │ │-- ...
+ │
+ `-- images
+ │ │-- train
+ │ │ │-- 000001_bonn_train
+ │ │ │ │-- 000000.jpg
+ │ │ │ │-- 000001.jpg
+ │ │ │ │-- ...
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000342_mpii_test
+ │ │ │ │-- 000000.jpg
+ │ │ │ │-- 000001.jpg
+ │ │ │ │-- ...
+ │ │ │-- ...
+ │ `-- test
+ │ │-- 000001_mpiinew_test
+ │ │ │-- 000000.jpg
+ │ │ │-- 000001.jpg
+ │ │ │-- ...
+ │ │-- ...
+ `-- mask
+ │-- train
+ │ │-- 000002_bonn_train
+ │ │ │-- 000000.jpg
+ │ │ │-- 000001.jpg
+ │ │ │-- ...
+ │ │-- ...
+ `-- val
+ │-- 000522_mpii_test
+ │ │-- 000000.jpg
+ │ │-- 000001.jpg
+ │ │-- ...
+ │-- ...
+```
+
+The official evaluation tool for PoseTrack should be installed from GitHub.
+
+```shell
+pip install git+https://github.com/svenkreiss/poseval.git
+```
+
+## sub-JHMDB dataset
+
+
+
+
+
+
+
+RSN (ECCV'2020)
+ +```bibtex +@misc{cai2020learning, + title={Learning Delicate Local Representations for Multi-Person Pose Estimation}, + author={Yuanhao Cai and Zhicheng Wang and Zhengxiong Luo and Binyi Yin and Angang Du and Haoqian Wang and Xinyu Zhou and Erjin Zhou and Xiangyu Zhang and Jian Sun}, + year={2020}, + eprint={2003.04030}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+  +
+
+
+For [sub-JHMDB](http://jhmdb.is.tue.mpg.de/dataset) data, please download the [images](<(http://files.is.tue.mpg.de/jhmdb/Rename_Images.tar.gz)>) from [JHMDB](http://jhmdb.is.tue.mpg.de/dataset),
+Please download the annotation files from [jhmdb_annotations](https://download.openmmlab.com/mmpose/datasets/jhmdb_annotations.tar).
+Move them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── jhmdb
+ │-- annotations
+ │ │-- Sub1_train.json
+ │ |-- Sub1_test.json
+ │ │-- Sub2_train.json
+ │ |-- Sub2_test.json
+ │ │-- Sub3_train.json
+ │ |-- Sub3_test.json
+ |-- Rename_Images
+ │-- brush_hair
+ │ │--April_09_brush_hair_u_nm_np1_ba_goo_0
+ | │ │--00001.png
+ | │ │--00002.png
+ │-- catch
+ │-- ...
+
+```
diff --git a/docs/en/dataset_zoo/2d_face_keypoint.md b/docs/en/dataset_zoo/2d_face_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..62f66bd82b570cca481b0b1963c1b6b4a163d4b7
--- /dev/null
+++ b/docs/en/dataset_zoo/2d_face_keypoint.md
@@ -0,0 +1,384 @@
+# 2D Face Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [300W](#300w-dataset) \[ [Homepage](https://ibug.doc.ic.ac.uk/resources/300-W/) \]
+- [WFLW](#wflw-dataset) \[ [Homepage](https://wywu.github.io/projects/LAB/WFLW.html) \]
+- [AFLW](#aflw-dataset) \[ [Homepage](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/) \]
+- [COFW](#cofw-dataset) \[ [Homepage](http://www.vision.caltech.edu/xpburgos/ICCV13/) \]
+- [COCO-WholeBody-Face](#coco-wholebody-face) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+- [LaPa](#lapa-dataset) \[ [Homepage](https://github.com/JDAI-CV/lapa-dataset) \]
+
+## 300W Dataset
+
+
+
+
+
+
+
+300W (IMAVIS'2016)
+ +```bibtex +@article{sagonas2016300, + title={300 faces in-the-wild challenge: Database and results}, + author={Sagonas, Christos and Antonakos, Epameinondas and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja}, + journal={Image and vision computing}, + volume={47}, + pages={3--18}, + year={2016}, + publisher={Elsevier} +} +``` + +
+  +
+
+
+For 300W data, please download images from [300W Dataset](https://ibug.doc.ic.ac.uk/resources/300-W/).
+Please download the annotation files from [300w_annotations](https://download.openmmlab.com/mmpose/datasets/300w_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── 300w
+ |── annotations
+ | |── face_landmarks_300w_train.json
+ | |── face_landmarks_300w_valid.json
+ | |── face_landmarks_300w_valid_common.json
+ | |── face_landmarks_300w_valid_challenge.json
+ | |── face_landmarks_300w_test.json
+ `── images
+ |── afw
+ | |── 1051618982_1.jpg
+ | |── 111076519_1.jpg
+ | ...
+ |── helen
+ | |── trainset
+ | | |── 100032540_1.jpg
+ | | |── 100040721_1.jpg
+ | | ...
+ | |── testset
+ | | |── 296814969_3.jpg
+ | | |── 2968560214_1.jpg
+ | | ...
+ |── ibug
+ | |── image_003_1.jpg
+ | |── image_004_1.jpg
+ | ...
+ |── lfpw
+ | |── trainset
+ | | |── image_0001.png
+ | | |── image_0002.png
+ | | ...
+ | |── testset
+ | | |── image_0001.png
+ | | |── image_0002.png
+ | | ...
+ `── Test
+ |── 01_Indoor
+ | |── indoor_001.png
+ | |── indoor_002.png
+ | ...
+ `── 02_Outdoor
+ |── outdoor_001.png
+ |── outdoor_002.png
+ ...
+```
+
+## WFLW Dataset
+
+
+
+
+
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+  +
+
+
+For WFLW data, please download images from [WFLW Dataset](https://wywu.github.io/projects/LAB/WFLW.html).
+Please download the annotation files from [wflw_annotations](https://download.openmmlab.com/mmpose/datasets/wflw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── wflw
+ |── annotations
+ | |── face_landmarks_wflw_train.json
+ | |── face_landmarks_wflw_test.json
+ | |── face_landmarks_wflw_test_blur.json
+ | |── face_landmarks_wflw_test_occlusion.json
+ | |── face_landmarks_wflw_test_expression.json
+ | |── face_landmarks_wflw_test_largepose.json
+ | |── face_landmarks_wflw_test_illumination.json
+ | |── face_landmarks_wflw_test_makeup.json
+ |
+ `── images
+ |── 0--Parade
+ | |── 0_Parade_marchingband_1_1015.jpg
+ | |── 0_Parade_marchingband_1_1031.jpg
+ | ...
+ |── 1--Handshaking
+ | |── 1_Handshaking_Handshaking_1_105.jpg
+ | |── 1_Handshaking_Handshaking_1_107.jpg
+ | ...
+ ...
+```
+
+## AFLW Dataset
+
+
+
+
+
+
+
+For AFLW data, please download images from [AFLW Dataset](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/).
+Please download the annotation files from [aflw_annotations](https://download.openmmlab.com/mmpose/datasets/aflw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── aflw
+ |── annotations
+ | |── face_landmarks_aflw_train.json
+ | |── face_landmarks_aflw_test_frontal.json
+ | |── face_landmarks_aflw_test.json
+ `── images
+ |── flickr
+ |── 0
+ | |── image00002.jpg
+ | |── image00013.jpg
+ | ...
+ |── 2
+ | |── image00004.jpg
+ | |── image00006.jpg
+ | ...
+ `── 3
+ |── image00032.jpg
+ |── image00035.jpg
+ ...
+```
+
+## COFW Dataset
+
+
+
+AFLW (ICCVW'2011)
+ +```bibtex +@inproceedings{koestinger2011annotated, + title={Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization}, + author={Koestinger, Martin and Wohlhart, Paul and Roth, Peter M and Bischof, Horst}, + booktitle={2011 IEEE international conference on computer vision workshops (ICCV workshops)}, + pages={2144--2151}, + year={2011}, + organization={IEEE} +} +``` + +
+
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+  +
+
+
+For COFW data, please download from [COFW Dataset (Color Images)](http://www.vision.caltech.edu/xpburgos/ICCV13/Data/COFW_color.zip).
+Move `COFW_train_color.mat` and `COFW_test_color.mat` to `data/cofw/` and make them look like:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+```
+
+Run the following script under `{MMPose}/data`
+
+`python tools/dataset_converters/parse_cofw_dataset.py`
+
+And you will get
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+ |── annotations
+ | |── cofw_train.json
+ | |── cofw_test.json
+ |── images
+ |── 000001.jpg
+ |── 000002.jpg
+```
+
+## COCO-WholeBody (Face)
+
+
+
+
+
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+  +
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
+
+## LaPa
+
+
+
+
+
+
+
+LaPa (AAAI'2020)
+ +```bibtex +@inproceedings{liu2020new, + title={A New Dataset and Boundary-Attention Semantic Segmentation for Face Parsing.}, + author={Liu, Yinglu and Shi, Hailin and Shen, Hao and Si, Yue and Wang, Xiaobo and Mei, Tao}, + booktitle={AAAI}, + pages={11637--11644}, + year={2020} +} +``` + +
+  +
+
+
+For [LaPa](https://github.com/JDAI-CV/lapa-dataset) dataset, images can be downloaded from [their github page](https://github.com/JDAI-CV/lapa-dataset).
+
+Download and extract them under $MMPOSE/data, and use our `tools/dataset_converters/lapa2coco.py` to make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── LaPa
+ │-- annotations
+ │ │-- lapa_train.json
+ │ |-- lapa_val.json
+ │ |-- lapa_test.json
+ | |-- lapa_trainval.json
+ │-- train
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+ │-- val
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+ `-- test
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+
+```
diff --git a/docs/en/dataset_zoo/2d_fashion_landmark.md b/docs/en/dataset_zoo/2d_fashion_landmark.md
new file mode 100644
index 0000000000000000000000000000000000000000..b1146b47b640820b5b58eb93772082624cc83522
--- /dev/null
+++ b/docs/en/dataset_zoo/2d_fashion_landmark.md
@@ -0,0 +1,142 @@
+# 2D Fashion Landmark Dataset
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [DeepFashion](#deepfashion) \[ [Homepage](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html) \]
+- [DeepFashion2](#deepfashion2) \[ [Homepage](https://github.com/switchablenorms/DeepFashion2) \]
+
+## DeepFashion (Fashion Landmark Detection, FLD)
+
+
+
+
+
+
+
+
+
+DeepFashion (CVPR'2016)
+ +```bibtex +@inproceedings{liuLQWTcvpr16DeepFashion, + author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou}, + title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations}, + booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2016} +} +``` + +
+
+
+DeepFashion (ECCV'2016)
+ +```bibtex +@inproceedings{liuYLWTeccv16FashionLandmark, + author = {Liu, Ziwei and Yan, Sijie and Luo, Ping and Wang, Xiaogang and Tang, Xiaoou}, + title = {Fashion Landmark Detection in the Wild}, + booktitle = {European Conference on Computer Vision (ECCV)}, + month = {October}, + year = {2016} + } +``` + +
+  +
+
+
+For [DeepFashion](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html) dataset, images can be downloaded from [download](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html).
+Please download the annotation files from [fld_annotations](https://download.openmmlab.com/mmpose/datasets/fld_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── fld
+ │-- annotations
+ │ │-- fld_upper_train.json
+ │ |-- fld_upper_val.json
+ │ |-- fld_upper_test.json
+ │ │-- fld_lower_train.json
+ │ |-- fld_lower_val.json
+ │ |-- fld_lower_test.json
+ │ │-- fld_full_train.json
+ │ |-- fld_full_val.json
+ │ |-- fld_full_test.json
+ │-- img
+ │ │-- img_00000001.jpg
+ │ │-- img_00000002.jpg
+ │ │-- img_00000003.jpg
+ │ │-- img_00000004.jpg
+ │ │-- img_00000005.jpg
+ │ │-- ...
+```
+
+## DeepFashion2
+
+
+
+
+
+
+
+
+
+For [DeepFashion2](https://github.com/switchablenorms/DeepFashion2) dataset, images can be downloaded from [download](https://drive.google.com/drive/folders/125F48fsMBz2EF0Cpqk6aaHet5VH399Ok?usp=sharing).
+Please download the [annotation files](https://drive.google.com/file/d/1RM9l9EaB9ULRXhoCS72PkCXtJ4Cn4i6O/view?usp=share_link). These annotation files are converted by [deepfashion2_to_coco.py](https://github.com/switchablenorms/DeepFashion2/blob/master/evaluation/deepfashion2_to_coco.py).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── deepfashion2
+ │── train
+ │-- deepfashion2_short_sleeved_outwear_train.json
+ │-- deepfashion2_short_sleeved_dress_train.json
+ │-- deepfashion2_skirt_train.json
+ │-- deepfashion2_sling_dress_train.json
+ │-- ...
+ │-- image
+ │ │-- 000001.jpg
+ │ │-- 000002.jpg
+ │ │-- 000003.jpg
+ │ │-- 000004.jpg
+ │ │-- 000005.jpg
+ │ │-- ...
+ │── validation
+ │-- deepfashion2_short_sleeved_dress_validation.json
+ │-- deepfashion2_long_sleeved_shirt_validation.json
+ │-- deepfashion2_trousers_validation.json
+ │-- deepfashion2_skirt_validation.json
+ │-- ...
+ │-- image
+ │ │-- 000001.jpg
+ │ │-- 000002.jpg
+ │ │-- 000003.jpg
+ │ │-- 000004.jpg
+ │ │-- 000005.jpg
+ │ │-- ...
+```
diff --git a/docs/en/dataset_zoo/2d_hand_keypoint.md b/docs/en/dataset_zoo/2d_hand_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..d641bc311dad34a45b6cecdd4c245154bdb8a94d
--- /dev/null
+++ b/docs/en/dataset_zoo/2d_hand_keypoint.md
@@ -0,0 +1,348 @@
+# 2D Hand Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [OneHand10K](#onehand10k) \[ [Homepage](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) \]
+- [FreiHand](#freihand-dataset) \[ [Homepage](https://lmb.informatik.uni-freiburg.de/projects/freihand/) \]
+- [CMU Panoptic HandDB](#cmu-panoptic-handdb) \[ [Homepage](http://domedb.perception.cs.cmu.edu/handdb.html) \]
+- [InterHand2.6M](#interhand26m) \[ [Homepage](https://mks0601.github.io/InterHand2.6M/) \]
+- [RHD](#rhd-dataset) \[ [Homepage](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html) \]
+- [COCO-WholeBody-Hand](#coco-wholebody-hand) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+
+## OneHand10K
+
+
+
+DeepFashion2 (CVPR'2019)
+ +```bibtex +@article{DeepFashion2, + author = {Yuying Ge and Ruimao Zhang and Lingyun Wu and Xiaogang Wang and Xiaoou Tang and Ping Luo}, + title={A Versatile Benchmark for Detection, Pose Estimation, Segmentation and Re-Identification of Clothing Images}, + journal={CVPR}, + year={2019} +} +``` + +
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+  +
+
+
+For [OneHand10K](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) data, please download from [OneHand10K Dataset](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html).
+Please download the annotation files from [onehand10k_annotations](https://download.openmmlab.com/mmpose/datasets/onehand10k_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── onehand10k
+ |── annotations
+ | |── onehand10k_train.json
+ | |── onehand10k_test.json
+ `── Train
+ | |── source
+ | |── 0.jpg
+ | |── 1.jpg
+ | ...
+ `── Test
+ |── source
+ |── 0.jpg
+ |── 1.jpg
+
+```
+
+## FreiHAND Dataset
+
+
+
+
+
+
+
+FreiHand (ICCV'2019)
+ +```bibtex +@inproceedings{zimmermann2019freihand, + title={Freihand: A dataset for markerless capture of hand pose and shape from single rgb images}, + author={Zimmermann, Christian and Ceylan, Duygu and Yang, Jimei and Russell, Bryan and Argus, Max and Brox, Thomas}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={813--822}, + year={2019} +} +``` + +
+
+
+
+For [FreiHAND](https://lmb.informatik.uni-freiburg.de/projects/freihand/) data, please download from [FreiHand Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/FreihandDataset.en.html).
+Since the official dataset does not provide validation set, we randomly split the training data into 8:1:1 for train/val/test.
+Please download the annotation files from [freihand_annotations](https://download.openmmlab.com/mmpose/datasets/frei_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── freihand
+ |── annotations
+ | |── freihand_train.json
+ | |── freihand_val.json
+ | |── freihand_test.json
+ `── training
+ |── rgb
+ | |── 00000000.jpg
+ | |── 00000001.jpg
+ | ...
+ |── mask
+ |── 00000000.jpg
+ |── 00000001.jpg
+ ...
+```
+
+## CMU Panoptic HandDB
+
+
+
+
+
+
+
+CMU Panoptic HandDB (CVPR'2017)
+ +```bibtex +@inproceedings{simon2017hand, + title={Hand keypoint detection in single images using multiview bootstrapping}, + author={Simon, Tomas and Joo, Hanbyul and Matthews, Iain and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={1145--1153}, + year={2017} +} +``` + +
+
+
+
+For [CMU Panoptic HandDB](http://domedb.perception.cs.cmu.edu/handdb.html), please download from [CMU Panoptic HandDB](http://domedb.perception.cs.cmu.edu/handdb.html).
+Following [Simon et al](https://arxiv.org/abs/1704.07809), panoptic images (hand143_panopticdb) and MPII & NZSL training sets (manual_train) are used for training, while MPII & NZSL test set (manual_test) for testing.
+Please download the annotation files from [panoptic_annotations](https://download.openmmlab.com/mmpose/datasets/panoptic_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── panoptic
+ |── annotations
+ | |── panoptic_train.json
+ | |── panoptic_test.json
+ |
+ `── hand143_panopticdb
+ | |── imgs
+ | | |── 00000000.jpg
+ | | |── 00000001.jpg
+ | | ...
+ |
+ `── hand_labels
+ |── manual_train
+ | |── 000015774_01_l.jpg
+ | |── 000015774_01_r.jpg
+ | ...
+ |
+ `── manual_test
+ |── 000648952_02_l.jpg
+ |── 000835470_01_l.jpg
+ ...
+```
+
+## InterHand2.6M
+
+
+
+
+
+
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+  +
+
+
+For [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/), please download from [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/).
+Please download the annotation files from [annotations](https://download.openmmlab.com/mmpose/datasets/interhand2.6m_annotations.zip).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── interhand2.6m
+ |── annotations
+ | |── all
+ | |── human_annot
+ | |── machine_annot
+ | |── skeleton.txt
+ | |── subject.txt
+ |
+ `── images
+ | |── train
+ | | |-- Capture0 ~ Capture26
+ | |── val
+ | | |-- Capture0
+ | |── test
+ | | |-- Capture0 ~ Capture7
+```
+
+## RHD Dataset
+
+
+
+
+
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+  +
+
+
+For [RHD Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html), please download from [RHD Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html).
+Please download the annotation files from [rhd_annotations](https://download.openmmlab.com/mmpose/datasets/rhd_annotations.zip).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── rhd
+ |── annotations
+ | |── rhd_train.json
+ | |── rhd_test.json
+ `── training
+ | |── color
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── depth
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── mask
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ `── evaluation
+ | |── color
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── depth
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── mask
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+```
+
+## COCO-WholeBody (Hand)
+
+
+
+
+
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
diff --git a/docs/en/dataset_zoo/2d_wholebody_keypoint.md b/docs/en/dataset_zoo/2d_wholebody_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..1c1e9f75d1808e53c9728fc6ac228cf4a9a1930a
--- /dev/null
+++ b/docs/en/dataset_zoo/2d_wholebody_keypoint.md
@@ -0,0 +1,215 @@
+# 2D Wholebody Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [COCO-WholeBody](#coco-wholebody) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+- [Halpe](#halpe) \[ [Homepage](https://github.com/Fang-Haoshu/Halpe-FullBody/) \]
+
+## COCO-WholeBody
+
+
+
+
+
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+  +
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) (version>=1.5) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
+
+## Halpe
+
+
+
+
+
+
+
+Halpe (CVPR'2020)
+ +```bibtex +@inproceedings{li2020pastanet, + title={PaStaNet: Toward Human Activity Knowledge Engine}, + author={Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu and Ma, Ze and Chen, Mingyang and Lu, Cewu}, + booktitle={CVPR}, + year={2020} +} +``` + +
+  +
+
+
+For [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/) dataset, please download images and annotations from [Halpe download](https://github.com/Fang-Haoshu/Halpe-FullBody).
+The images of the training set are from [HICO-Det](https://drive.google.com/open?id=1QZcJmGVlF9f4h-XLWe9Gkmnmj2z1gSnk) and those of the validation set are from [COCO](http://images.cocodataset.org/zips/val2017.zip).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── halpe
+ │-- annotations
+ │ │-- halpe_train_v1.json
+ │ |-- halpe_val_v1.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- hico_20160224_det
+ │ │-- anno_bbox.mat
+ │ │-- anno.mat
+ │ │-- README
+ │ │-- images
+ │ │ │-- train2015
+ │ │ │ │-- HICO_train2015_00000001.jpg
+ │ │ │ │-- HICO_train2015_00000002.jpg
+ │ │ │ │-- HICO_train2015_00000003.jpg
+ │ │ │ │-- ...
+ │ │ │-- test2015
+ │ │-- tools
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) (version>=1.5) to support Halpe evaluation:
+
+`pip install xtcocotools`
+
+## UBody
+
+
+
+
+
+
+
+UBody (CVPR'2023)
+ +```bibtex +@article{lin2023one, + title={One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer}, + author={Lin, Jing and Zeng, Ailing and Wang, Haoqian and Zhang, Lei and Li, Yu}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + year={2023}, +} +``` + +
+  +
+
+
+For [Ubody](https://github.com/IDEA-Research/OSX) dataset, videos and annotations can be downloaded from [OSX homepage](https://github.com/IDEA-Research/OSX).
+
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── UBody
+ ├── annotations
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+ ├── splits
+ │ ├── inter_scene_test_list.npy
+ │ └── intra_scene_test_list.npy
+ ├── videos
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+```
+
+Convert videos to images then split them into train/val set:
+
+```shell
+python tools/dataset_converters/ubody_kpts_to_coco.py
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) (version>=1.5) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
diff --git a/docs/en/dataset_zoo/3d_body_keypoint.md b/docs/en/dataset_zoo/3d_body_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..3a35e2443baf7f5d5da36f08916527c21fb64abb
--- /dev/null
+++ b/docs/en/dataset_zoo/3d_body_keypoint.md
@@ -0,0 +1,297 @@
+# 3D Body Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [Human3.6M](#human36m) \[ [Homepage](http://vision.imar.ro/human3.6m/description.php) \]
+- [CMU Panoptic](#cmu-panoptic) \[ [Homepage](http://domedb.perception.cs.cmu.edu/) \]
+- [Campus/Shelf](#campus-and-shelf) \[ [Homepage](http://campar.in.tum.de/Chair/MultiHumanPose) \]
+- [UBody](#ubody3d) \[ [Homepage](https://osx-ubody.github.io/) \]
+
+## Human3.6M
+
+
+
+
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+  +
+
+
+For [Human3.6M](http://vision.imar.ro/human3.6m/description.php), please download from the official website and run the [preprocessing script](/tools/dataset_converters/preprocess_h36m.py), which will extract camera parameters and pose annotations at full framerate (50 FPS) and downsampled framerate (10 FPS). The processed data should have the following structure:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── h36m
+ ├── annotation_body3d
+ | ├── cameras.pkl
+ | ├── fps50
+ | | ├── h36m_test.npz
+ | | ├── h36m_train.npz
+ | | ├── joint2d_rel_stats.pkl
+ | | ├── joint2d_stats.pkl
+ | | ├── joint3d_rel_stats.pkl
+ | | `── joint3d_stats.pkl
+ | `── fps10
+ | ├── h36m_test.npz
+ | ├── h36m_train.npz
+ | ├── joint2d_rel_stats.pkl
+ | ├── joint2d_stats.pkl
+ | ├── joint3d_rel_stats.pkl
+ | `── joint3d_stats.pkl
+ `── images
+ ├── S1
+ | ├── S1_Directions_1.54138969
+ | | ├── S1_Directions_1.54138969_00001.jpg
+ | | ├── S1_Directions_1.54138969_00002.jpg
+ | | ├── ...
+ | ├── ...
+ ├── S5
+ ├── S6
+ ├── S7
+ ├── S8
+ ├── S9
+ `── S11
+```
+
+## CMU Panoptic
+
+
+
+
+
+CMU Panoptic (ICCV'2015)
+ +```bibtex +@Article = {joo_iccv_2015, +author = {Hanbyul Joo, Hao Liu, Lei Tan, Lin Gui, Bart Nabbe, Iain Matthews, Takeo Kanade, Shohei Nobuhara, and Yaser Sheikh}, +title = {Panoptic Studio: A Massively Multiview System for Social Motion Capture}, +booktitle = {ICCV}, +year = {2015} +} +``` + +
+  +
+
+
+Please follow [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) to prepare this dataset.
+
+1. Download the dataset by following the instructions in [panoptic-toolbox](https://github.com/CMU-Perceptual-Computing-Lab/panoptic-toolbox) and extract them under `$MMPOSE/data/panoptic`.
+
+2. Only download those sequences that are needed. You can also just download a subset of camera views by specifying the number of views (HD_Video_Number) and changing the camera order in `./scripts/getData.sh`. The used sequences and camera views can be found in [VoxelPose](https://arxiv.org/abs/2004.06239). Note that the sequence "160906_band3" might not be available due to errors on the server of CMU Panoptic.
+
+3. Note that we only use HD videos, calibration data, and 3D Body Keypoint in the codes. You can comment out other irrelevant codes such as downloading 3D Face data in `./scripts/getData.sh`.
+
+The directory tree should be like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── panoptic
+ ├── 16060224_haggling1
+ | | ├── hdImgs
+ | | ├── hdvideos
+ | | ├── hdPose3d_stage1_coco19
+ | | ├── calibration_160224_haggling1.json
+ ├── 160226_haggling1
+ ├── ...
+```
+
+## Campus and Shelf
+
+
+
+
+
+Campus and Shelf (CVPR'2014)
+ +```bibtex +@inproceedings {belagian14multi, + title = {{3D} Pictorial Structures for Multiple Human Pose Estimation}, + author = {Belagiannis, Vasileios and Amin, Sikandar and Andriluka, Mykhaylo and Schiele, Bernt and Navab + Nassir and Ilic, Slobo + booktitle = {IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June}, + organization={IEEE} +} +``` + +
+  +
+
+
+Please follow [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) to prepare these two datasets.
+
+1. Please download the datasets from the [official website](http://campar.in.tum.de/Chair/MultiHumanPose) and extract them under `$MMPOSE/data/campus` and `$MMPOSE/data/shelf`, respectively. The original data include images as well as the ground truth pose file `actorsGT.mat`.
+
+2. We directly use the processed camera parameters from [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch). You can download them from this repository and place in under `$MMPOSE/data/campus/calibration_campus.json` and `$MMPOSE/data/shelf/calibration_shelf.json`, respectively.
+
+3. Like [Voxelpose](https://github.com/microsoft/voxelpose-pytorch), due to the limited and incomplete annotations of the two datasets, we don't train the model using this dataset. Instead, we directly use the 2D pose estimator trained on COCO, and use independent 3D human poses from the CMU Panoptic dataset to train our 3D model. It lies in `${MMPOSE}/data/panoptic_training_pose.pkl`.
+
+4. Like [Voxelpose](https://github.com/microsoft/voxelpose-pytorch), for testing, we first estimate 2D poses and generate 2D heatmaps for these two datasets. You can download the predicted poses from [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) and place them in `$MMPOSE/data/campus/pred_campus_maskrcnn_hrnet_coco.pkl` and `$MMPOSE/data/shelf/pred_shelf_maskrcnn_hrnet_coco.pkl`, respectively. You can also use the models trained on COCO dataset (like HigherHRNet) to generate 2D heatmaps directly.
+
+The directory tree should be like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── panoptic_training_pose.pkl
+ ├── campus
+ | ├── Camera0
+ | | | ├── campus4-c0-00000.png
+ | | | ├── ...
+ | | | ├── campus4-c0-01999.png
+ | ...
+ | ├── Camera2
+ | | | ├── campus4-c2-00000.png
+ | | | ├── ...
+ | | | ├── campus4-c2-01999.png
+ | ├── calibration_campus.json
+ | ├── pred_campus_maskrcnn_hrnet_coco.pkl
+ | ├── actorsGT.mat
+ ├── shelf
+ | ├── Camera0
+ | | | ├── img_000000.png
+ | | | ├── ...
+ | | | ├── img_003199.png
+ | ...
+ | ├── Camera4
+ | | | ├── img_000000.png
+ | | | ├── ...
+ | | | ├── img_003199.png
+ | ├── calibration_shelf.json
+ | ├── pred_shelf_maskrcnn_hrnet_coco.pkl
+ | ├── actorsGT.mat
+```
+
+## UBody3d
+
+
+
+
+
+UBody (CVPR'2023)
+ +```bibtex +@article{lin2023one, + title={One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer}, + author={Lin, Jing and Zeng, Ailing and Wang, Haoqian and Zhang, Lei and Li, Yu}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + year={2023}, +} +``` + +
+
+
+
+For [Ubody](https://github.com/IDEA-Research/OSX) dataset, videos and annotations can be downloaded from [OSX homepage](https://github.com/IDEA-Research/OSX).
+
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── UBody
+ ├── annotations
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+ ├── splits
+ │ ├── inter_scene_test_list.npy
+ │ └── intra_scene_test_list.npy
+ ├── videos
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+```
+
+Convert videos to images then split them into train/val set:
+
+```shell
+python tools/dataset_converters/ubody_kpts_to_coco.py
+```
+
+Before generating 3D keypoints, you need to install SMPLX tools and download human models, please refer to [Github](https://github.com/vchoutas/smplx#installation) and [SMPLX](https://smpl-x.is.tue.mpg.de/download.php).
+
+```shell
+pip install smplx
+```
+
+The directory tree of human models should be like this:
+
+```text
+human_model_path
+|── smplx
+ ├── SMPLX_NEUTRAL.npz
+ ├── SMPLX_NEUTRAL.pkl
+```
+
+After the above preparations are finished, execute the following script:
+
+```shell
+python tools/dataset_converters/ubody_smplx_to_coco.py --data-root {$MMPOSE/data/UBody} --human-model-path {$MMPOSE/data/human_model_path/}
+```
diff --git a/docs/en/dataset_zoo/3d_body_mesh.md b/docs/en/dataset_zoo/3d_body_mesh.md
new file mode 100644
index 0000000000000000000000000000000000000000..aced63c802c20f0d7b07277393076f2e03f87afc
--- /dev/null
+++ b/docs/en/dataset_zoo/3d_body_mesh.md
@@ -0,0 +1,342 @@
+# 3D Body Mesh Recovery Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+To achieve high-quality human mesh estimation, we use multiple datasets for training.
+The following items should be prepared for human mesh training:
+
+
+
+- [3D Body Mesh Recovery Datasets](#3d-body-mesh-recovery-datasets)
+ - [Notes](#notes)
+ - [Annotation Files for Human Mesh Estimation](#annotation-files-for-human-mesh-estimation)
+ - [SMPL Model](#smpl-model)
+ - [COCO](#coco)
+ - [Human3.6M](#human36m)
+ - [MPI-INF-3DHP](#mpi-inf-3dhp)
+ - [LSP](#lsp)
+ - [LSPET](#lspet)
+ - [CMU MoShed Data](#cmu-moshed-data)
+
+
+
+## Notes
+
+### Annotation Files for Human Mesh Estimation
+
+For human mesh estimation, we use multiple datasets for training.
+The annotation of different datasets are preprocessed to the same format. Please
+follow the [preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to generate the annotation files or download the processed files from
+[here](https://download.openmmlab.com/mmpose/datasets/mesh_annotation_files.zip),
+and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mesh_annotation_files
+ ├── coco_2014_train.npz
+ ├── h36m_valid_protocol1.npz
+ ├── h36m_valid_protocol2.npz
+ ├── hr-lspet_train.npz
+ ├── lsp_dataset_original_train.npz
+ ├── mpi_inf_3dhp_train.npz
+ └── mpii_train.npz
+```
+
+### SMPL Model
+
+```bibtex
+@article{loper2015smpl,
+ title={SMPL: A skinned multi-person linear model},
+ author={Loper, Matthew and Mahmood, Naureen and Romero, Javier and Pons-Moll, Gerard and Black, Michael J},
+ journal={ACM transactions on graphics (TOG)},
+ volume={34},
+ number={6},
+ pages={1--16},
+ year={2015},
+ publisher={ACM New York, NY, USA}
+}
+```
+
+For human mesh estimation, SMPL model is used to generate the human mesh.
+Please download the [gender neutral SMPL model](http://smplify.is.tue.mpg.de/),
+[joints regressor](https://download.openmmlab.com/mmpose/datasets/joints_regressor_cmr.npy)
+and [mean parameters](https://download.openmmlab.com/mmpose/datasets/smpl_mean_params.npz)
+under `$MMPOSE/models/smpl`, and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── ...
+├── models
+ │── smpl
+ ├── joints_regressor_cmr.npy
+ ├── smpl_mean_params.npz
+ └── SMPL_NEUTRAL.pkl
+```
+
+## COCO
+
+
+
+
+
+
+For [COCO](http://cocodataset.org/) data, please download from [COCO download](http://cocodataset.org/#download). COCO'2014 Train is needed for human mesh estimation training.
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- train2014
+ │ ├── COCO_train2014_000000000009.jpg
+ │ ├── COCO_train2014_000000000025.jpg
+ │ ├── COCO_train2014_000000000030.jpg
+ | │-- ...
+
+```
+
+## Human3.6M
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+For [Human3.6M](http://vision.imar.ro/human3.6m/description.php), we use the MoShed data provided in [HMR](https://github.com/akanazawa/hmr) for training.
+However, due to license limitations, we are not allowed to redistribute the MoShed data.
+
+For the evaluation on Human3.6M dataset, please follow the
+[preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to extract test images from
+[Human3.6M](http://vision.imar.ro/human3.6m/description.php) original videos,
+and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── Human3.6M
+ ├── images
+ ├── S11_Directions_1.54138969_000001.jpg
+ ├── S11_Directions_1.54138969_000006.jpg
+ ├── S11_Directions_1.54138969_000011.jpg
+ ├── ...
+```
+
+The download of Human3.6M dataset is quite difficult, you can also download the
+[zip file](https://drive.google.com/file/d/1WnRJD9FS3NUf7MllwgLRJJC-JgYFr8oi/view?usp=sharing)
+of the test images. However, due to the license limitations, we are not allowed to
+redistribute the images either. So the users need to download the original video and
+extract the images by themselves.
+
+## MPI-INF-3DHP
+
+
+
+```bibtex
+@inproceedings{mono-3dhp2017,
+ author = {Mehta, Dushyant and Rhodin, Helge and Casas, Dan and Fua, Pascal and Sotnychenko, Oleksandr and Xu, Weipeng and Theobalt, Christian},
+ title = {Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision},
+ booktitle = {3D Vision (3DV), 2017 Fifth International Conference on},
+ url = {http://gvv.mpi-inf.mpg.de/3dhp_dataset},
+ year = {2017},
+ organization={IEEE},
+ doi={10.1109/3dv.2017.00064},
+}
+```
+
+For [MPI-INF-3DHP](http://gvv.mpi-inf.mpg.de/3dhp-dataset/), please follow the
+[preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to sample images, and make them like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── mpi_inf_3dhp_test_set
+ │ ├── TS1
+ │ ├── TS2
+ │ ├── TS3
+ │ ├── TS4
+ │ ├── TS5
+ │ └── TS6
+ ├── S1
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S2
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S3
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S4
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S5
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S6
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S7
+ │ ├── Seq1
+ │ └── Seq2
+ └── S8
+ ├── Seq1
+ └── Seq2
+```
+
+## LSP
+
+
+
+```bibtex
+@inproceedings{johnson2010clustered,
+ title={Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation.},
+ author={Johnson, Sam and Everingham, Mark},
+ booktitle={bmvc},
+ volume={2},
+ number={4},
+ pages={5},
+ year={2010},
+ organization={Citeseer}
+}
+```
+
+For [LSP](https://sam.johnson.io/research/lsp.html), please download the high resolution version
+[LSP dataset original](http://sam.johnson.io/research/lsp_dataset_original.zip).
+Extract them under `$MMPOSE/data`, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── lsp_dataset_original
+ ├── images
+ ├── im0001.jpg
+ ├── im0002.jpg
+ └── ...
+```
+
+## LSPET
+
+
+
+```bibtex
+@inproceedings{johnson2011learning,
+ title={Learning effective human pose estimation from inaccurate annotation},
+ author={Johnson, Sam and Everingham, Mark},
+ booktitle={CVPR 2011},
+ pages={1465--1472},
+ year={2011},
+ organization={IEEE}
+}
+```
+
+For [LSPET](https://sam.johnson.io/research/lspet.html), please download its high resolution form
+[HR-LSPET](http://datasets.d2.mpi-inf.mpg.de/hr-lspet/hr-lspet.zip).
+Extract them under `$MMPOSE/data`, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── lspet_dataset
+ ├── images
+ │ ├── im00001.jpg
+ │ ├── im00002.jpg
+ │ ├── im00003.jpg
+ │ └── ...
+ └── joints.mat
+```
+
+## CMU MoShed Data
+
+
+
+```bibtex
+@inproceedings{kanazawa2018end,
+ title={End-to-end recovery of human shape and pose},
+ author={Kanazawa, Angjoo and Black, Michael J and Jacobs, David W and Malik, Jitendra},
+ booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
+ pages={7122--7131},
+ year={2018}
+}
+```
+
+Real-world SMPL parameters are used for the adversarial training in human mesh estimation.
+The MoShed data provided in [HMR](https://github.com/akanazawa/hmr) is included in this
+[zip file](https://download.openmmlab.com/mmpose/datasets/mesh_annotation_files.zip).
+Please download and extract it under `$MMPOSE/data`, and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mesh_annotation_files
+ ├── CMU_mosh.npz
+ └── ...
+```
diff --git a/docs/en/dataset_zoo/3d_hand_keypoint.md b/docs/en/dataset_zoo/3d_hand_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..823dc6ad64ad441c03a587e5e6ae8492bf591b7d
--- /dev/null
+++ b/docs/en/dataset_zoo/3d_hand_keypoint.md
@@ -0,0 +1,59 @@
+# 3D Hand Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [InterHand2.6M](#interhand26m) \[ [Homepage](https://mks0601.github.io/InterHand2.6M/) \]
+
+## InterHand2.6M
+
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+  +
+
+
+For [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/), please download from [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/).
+Please download the annotation files from [annotations](https://download.openmmlab.com/mmpose/datasets/interhand2.6m_annotations.zip).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── interhand2.6m
+ |── annotations
+ | |── all
+ | |── human_annot
+ | |── machine_annot
+ | |── skeleton.txt
+ | |── subject.txt
+ |
+ `── images
+ | |── train
+ | | |-- Capture0 ~ Capture26
+ | |── val
+ | | |-- Capture0
+ | |── test
+ | | |-- Capture0 ~ Capture7
+```
diff --git a/docs/en/dataset_zoo/3d_wholebody_keypoint.md b/docs/en/dataset_zoo/3d_wholebody_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..7edd5f4173f39449d388c59360f4dabe80f6c98c
--- /dev/null
+++ b/docs/en/dataset_zoo/3d_wholebody_keypoint.md
@@ -0,0 +1,77 @@
+# 3D Body Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [H3WB](#h3wb) \[ [Homepage](https://github.com/wholebody3d/wholebody3d) \]
+
+## H3WB
+
+
+
+
+
+
+
+H3WB (ICCV'2023)
+ +```bibtex +@InProceedings{Zhu_2023_ICCV, + author = {Zhu, Yue and Samet, Nermin and Picard, David}, + title = {H3WB: Human3.6M 3D WholeBody Dataset and Benchmark}, + booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2023}, + pages = {20166-20177} +} +``` + +
+
+
+
+For [H3WB](https://github.com/wholebody3d/wholebody3d), please follow the [document](3d_body_keypoint.md#human36m) to download [Human3.6M](http://vision.imar.ro/human3.6m/description.php) dataset, then download the H3WB annotations from the official [webpage](https://github.com/wholebody3d/wholebody3d). NOTES: please follow their [updates](https://github.com/wholebody3d/wholebody3d?tab=readme-ov-file#updates) to download the annotations.
+
+The data should have the following structure:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── h36m
+ ├── annotation_body3d
+ | ├── cameras.pkl
+ | ├── h3wb_train.npz
+ | ├── fps50
+ | | ├── h36m_test.npz
+ | | ├── h36m_train.npz
+ | | ├── joint2d_rel_stats.pkl
+ | | ├── joint2d_stats.pkl
+ | | ├── joint3d_rel_stats.pkl
+ | | `── joint3d_stats.pkl
+ | `── fps10
+ | ├── h36m_test.npz
+ | ├── h36m_train.npz
+ | ├── joint2d_rel_stats.pkl
+ | ├── joint2d_stats.pkl
+ | ├── joint3d_rel_stats.pkl
+ | `── joint3d_stats.pkl
+ `── images
+ ├── S1
+ | ├── S1_Directions_1.54138969
+ | | ├── S1_Directions_1.54138969_00001.jpg
+ | | ├── S1_Directions_1.54138969_00002.jpg
+ | | ├── ...
+ | ├── ...
+ ├── S5
+ ├── S6
+ ├── S7
+ ├── S8
+ ├── S9
+ `── S11
+```
diff --git a/docs/en/faq.md b/docs/en/faq.md
new file mode 100644
index 0000000000000000000000000000000000000000..94f6f6d4a5cc0ce6f9ef83414c866e2fc10d7851
--- /dev/null
+++ b/docs/en/faq.md
@@ -0,0 +1,166 @@
+# FAQ
+
+We list some common issues faced by many users and their corresponding solutions here.
+Feel free to enrich the list if you find any frequent issues and have ways to help others to solve them.
+If the contents here do not cover your issue, please create an issue using the [provided templates](/.github/ISSUE_TEMPLATE/error-report.md) and make sure you fill in all required information in the template.
+
+## Installation
+
+Compatibility issue between MMCV and MMPose; "AssertionError: MMCV==xxx is used but incompatible. Please install mmcv>=xxx, \<=xxx."
+
+Here are the version correspondences between `mmdet`, `mmcv` and `mmpose`:
+
+- mmdet 2.x \<=> mmpose 0.x \<=> mmcv 1.x
+- mmdet 3.x \<=> mmpose 1.x \<=> mmcv 2.x
+
+Detailed compatible MMPose and MMCV versions are shown as below. Please choose the correct version of MMCV to avoid installation issues.
+
+### MMPose 1.x
+
+| MMPose version | MMCV/MMEngine version |
+| :------------: | :-----------------------------: |
+| 1.3.1 | mmcv>=2.0.1, mmengine>=0.9.0 |
+| 1.3.0 | mmcv>=2.0.1, mmengine>=0.9.0 |
+| 1.2.0 | mmcv>=2.0.1, mmengine>=0.8.0 |
+| 1.1.0 | mmcv>=2.0.1, mmengine>=0.8.0 |
+| 1.0.0 | mmcv>=2.0.0, mmengine>=0.7.0 |
+| 1.0.0rc1 | mmcv>=2.0.0rc4, mmengine>=0.6.0 |
+| 1.0.0rc0 | mmcv>=2.0.0rc0, mmengine>=0.0.1 |
+| 1.0.0b0 | mmcv>=2.0.0rc0, mmengine>=0.0.1 |
+
+### MMPose 0.x
+
+| MMPose version | MMCV version |
+| :------------: | :-----------------------: |
+| 0.x | mmcv-full>=1.3.8, \<1.8.0 |
+| 0.29.0 | mmcv-full>=1.3.8, \<1.7.0 |
+| 0.28.1 | mmcv-full>=1.3.8, \<1.7.0 |
+| 0.28.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.27.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.26.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.25.1 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.25.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.24.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.23.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.22.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.21.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.20.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.19.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.18.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.17.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.16.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.14.0 | mmcv-full>=1.1.3, \<1.4.0 |
+| 0.13.0 | mmcv-full>=1.1.3, \<1.4.0 |
+| 0.12.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.11.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.10.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.9.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.8.0 | mmcv-full>=1.1.1, \<1.2 |
+| 0.7.0 | mmcv-full>=1.1.1, \<1.2 |
+
+- **Unable to install xtcocotools**
+
+ 1. Try to install it using pypi manually `pip install xtcocotools`.
+ 2. If step1 does not work. Try to install it from [source](https://github.com/jin-s13/xtcocoapi).
+
+ ```
+ git clone https://github.com/jin-s13/xtcocoapi
+ cd xtcocoapi
+ python setup.py install
+ ```
+
+- **No matching distribution found for xtcocotools>=1.6**
+
+ 1. Install cython by `pip install cython`.
+ 2. Install xtcocotools from [source](https://github.com/jin-s13/xtcocoapi).
+
+ ```
+ git clone https://github.com/jin-s13/xtcocoapi
+ cd xtcocoapi
+ python setup.py install
+ ```
+
+- **"No module named 'mmcv.ops'"; "No module named 'mmcv.\_ext'"**
+
+ 1. Uninstall existing mmcv in the environment using `pip uninstall mmcv`.
+ 2. Install mmcv following [mmcv installation instruction](https://mmcv.readthedocs.io/en/2.x/get_started/installation.html).
+
+## Data
+
+- **What if my custom dataset does not have bounding box label?**
+
+ We can estimate the bounding box of a person as the minimal box that tightly bounds all the keypoints.
+
+- **What is `COCO_val2017_detections_AP_H_56_person.json`? Can I train pose models without it?**
+
+ "COCO_val2017_detections_AP_H_56_person.json" contains the "detected" human bounding boxes for COCO validation set, which are generated by FasterRCNN.
+ One can choose to use gt bounding boxes to evaluate models, by setting `bbox_file=None` in `val_dataloader.dataset` in config. Or one can use detected boxes to evaluate
+ the generalizability of models, by setting `bbox_file='COCO_val2017_detections_AP_H_56_person.json'`.
+
+## Training
+
+- **RuntimeError: Address already in use**
+
+ Set the environment variables `MASTER_PORT=XXX`. For example:
+
+ ```shell
+ MASTER_PORT=29517 GPUS=16 GPUS_PER_NODE=8 CPUS_PER_TASK=2 ./tools/slurm_train.sh train res50 configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py work_dirs/res50_coco_256x192
+ ```
+
+- **"Unexpected keys in source state dict" when loading pre-trained weights**
+
+ It's normal that some layers in the pretrained model are not used in the pose model. ImageNet-pretrained classification network and the pose network may have different architectures (e.g. no classification head). So some unexpected keys in source state dict is actually expected.
+
+- **How to use trained models for backbone pre-training ?**
+
+ Refer to [Migration - Step3: Model - Backbone](../migration.md).
+
+ When training, the unexpected keys will be ignored.
+
+- **How to visualize the training accuracy/loss curves in real-time ?**
+
+ Modify `vis_backends` in config file like:
+
+ ```python
+ vis_backends = [
+ dict(type='LocalVisBackend'),
+ dict(type='TensorboardVisBackend')
+ ]
+ ```
+
+ You can refer to [user_guides/visualization.md](../user_guides/visualization.md).
+
+- **Log info is NOT printed**
+
+ Use smaller log interval. For example, change `interval=50` to `interval=1` in the config:
+
+ ```python
+ # hooks
+ default_hooks = dict(logger=dict(interval=1))
+ ```
+
+## Evaluation
+
+- **How to evaluate on MPII test dataset?**
+ Since we do not have the ground-truth for test dataset, we cannot evaluate it 'locally'.
+ If you would like to evaluate the performance on test set, you have to upload the pred.mat (which is generated during testing) to the official server via email, according to [the MPII guideline](http://human-pose.mpi-inf.mpg.de/#evaluation).
+
+- **For top-down 2d pose estimation, why predicted joint coordinates can be out of the bounding box (bbox)?**
+ We do not directly use the bbox to crop the image. bbox will be first transformed to center & scale, and the scale will be multiplied by a factor (1.25) to include some context. If the ratio of width/height is different from that of model input (possibly 192/256), we will adjust the bbox.
+
+## Inference
+
+- **How to run mmpose on CPU?**
+
+ Run demos with `--device=cpu`.
+
+- **How to speed up inference?**
+
+ A few approaches may help to improve the inference speed:
+
+ 1. Set `flip_test=False` in `init_cfg` in the config file.
+ 2. For top-down models, use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/en/3.x/model_zoo.html).
+
+- **What is the definition of each keypoint index?**
+
+ Check the [meta information file](https://github.com/open-mmlab/mmpose/tree/main/configs/_base_/datasets) for the dataset used to train the model you are using. They key `keypoint_info` includes the definition of each keypoint.
diff --git a/docs/en/guide_to_framework.md b/docs/en/guide_to_framework.md
new file mode 100644
index 0000000000000000000000000000000000000000..167a65d949c05edaabb6977ffa2e19efb2a4c823
--- /dev/null
+++ b/docs/en/guide_to_framework.md
@@ -0,0 +1,731 @@
+# A 20-minute Tour to MMPose
+
+MMPose 1.0 is built upon a brand-new framework. For developers with basic knowledge of deep learning, this tutorial provides a overview of MMPose 1.0 framework design. Whether you are **a user of the previous version of MMPose**, or **a beginner of MMPose wishing to start with v1.0**, this tutorial will show you how to build a project based on MMPose 1.0.
+
+```{note}
+This tutorial covers what developers will concern when using MMPose 1.0:
+
+- Overall code architecture
+
+- How to manage modules with configs
+
+- How to use my own custom datasets
+
+- How to add new modules(backbone, head, loss function, etc.)
+```
+
+The content of this tutorial is organized as follows:
+
+- [A 20 Minute Guide to MMPose Framework](#a-20-minute-guide-to-mmpose-framework)
+ - [Structure](#structure)
+ - [Overview](#overview)
+ - [Step1: Configs](#step1-configs)
+ - [Step2: Data](#step2-data)
+ - [Dataset Meta Information](#dataset-meta-information)
+ - [Dataset](#dataset)
+ - [Pipeline](#pipeline)
+ - [i. Augmentation](#i-augmentation)
+ - [ii. Transformation](#ii-transformation)
+ - [iii. Encoding](#iii-encoding)
+ - [iv. Packing](#iv-packing)
+ - [Step3: Model](#step3-model)
+ - [Data Preprocessor](#data-preprocessor)
+ - [Backbone](#backbone)
+ - [Neck](#neck)
+ - [Head](#head)
+
+## Structure
+
+The file structure of MMPose 1.0 is as follows:
+
+```shell
+mmpose
+|----apis
+|----structures
+|----datasets
+ |----transforms
+|----codecs
+|----models
+ |----pose_estimators
+ |----data_preprocessors
+ |----backbones
+ |----necks
+ |----heads
+ |----losses
+|----engine
+ |----hooks
+|----evaluation
+|----visualization
+```
+
+- **apis** provides high-level APIs for model inference
+- **structures** provides data structures like bbox, keypoint and PoseDataSample
+- **datasets** supports various datasets for pose estimation
+ - **transforms** contains a lot of useful data augmentation transforms
+- **codecs** provides pose encoders and decoders: an encoder encodes poses (mostly keypoints) into learning targets (e.g. heatmaps), and a decoder decodes model outputs into pose predictions
+- **models** provides all components of pose estimation models in a modular structure
+ - **pose_estimators** defines all pose estimation model classes
+ - **data_preprocessors** is for preprocessing the input data of the model
+ - **backbones** provides a collection of backbone networks
+ - **necks** contains various neck modules
+ - **heads** contains various prediction heads that perform pose estimation
+ - **losses** contains various loss functions
+- **engine** provides runtime components related to pose estimation
+ - **hooks** provides various hooks of the runner
+- **evaluation** provides metrics for evaluating model performance
+- **visualization** is for visualizing skeletons, heatmaps and other information
+
+## Overview
+
+
+
+Generally speaking, there are **five parts** developers will use during project development:
+
+- **General:** Environment, Hook, Checkpoint, Logger, etc.
+
+- **Data:** Dataset, Dataloader, Data Augmentation, etc.
+
+- **Training:** Optimizer, Learning Rate Scheduler, etc.
+
+- **Model:** Backbone, Neck, Head, Loss function, etc.
+
+- **Evaluation:** Metric, Evaluator, etc.
+
+Among them, modules related to **General**, **Training** and **Evaluation** are often provided by the training framework [MMEngine](https://github.com/open-mmlab/mmengine), and developers only need to call APIs and adjust the parameters. Developers mainly focus on implementing the **Data** and **Model** parts.
+
+## Step1: Configs
+
+In MMPose, we use a Python file as config for the definition and parameter management of the whole project. Therefore, we strongly recommend the developers who use MMPose for the first time to refer to [Configs](./user_guides/configs.md).
+
+Note that all new modules need to be registered using `Registry` and imported in `__init__.py` in the corresponding directory before we can create their instances from configs.
+
+## Step2: Data
+
+The organization of data in MMPose contains:
+
+- Dataset Meta Information
+- Dataset
+- Pipeline
+
+### Dataset Meta Information
+
+The meta information of a pose dataset usually includes the definition of keypoints and skeleton, symmetrical characteristic, and keypoint properties (e.g. belonging to upper or lower body, weights and sigmas). These information is important in data preprocessing, model training and evaluation. In MMpose, the dataset meta information is stored in configs files under [$MMPOSE/configs/\_base\_/datasets](https://github.com/open-mmlab/mmpose/tree/main/configs/_base_/datasets).
+
+To use a custom dataset in MMPose, you need to add a new config file of the dataset meta information. Take the MPII dataset ([$MMPOSE/configs/\_base\_/datasets/mpii.py](https://github.com/open-mmlab/mmpose/blob/main/configs/_base_/datasets/mpii.py)) as an example. Here is its dataset information:
+
+```Python
+dataset_info = dict(
+ dataset_name='mpii',
+ paper_info=dict(
+ author='Mykhaylo Andriluka and Leonid Pishchulin and '
+ 'Peter Gehler and Schiele, Bernt',
+ title='2D Human Pose Estimation: New Benchmark and '
+ 'State of the Art Analysis',
+ container='IEEE Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2014',
+ homepage='http://human-pose.mpi-inf.mpg.de/',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ ## omitted
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ ## omitted
+ },
+ joint_weights=[
+ 1.5, 1.2, 1., 1., 1.2, 1.5, 1., 1., 1., 1., 1.5, 1.2, 1., 1., 1.2, 1.5
+ ],
+ # Adapted from COCO dataset.
+ sigmas=[
+ 0.089, 0.083, 0.107, 0.107, 0.083, 0.089, 0.026, 0.026, 0.026, 0.026,
+ 0.062, 0.072, 0.179, 0.179, 0.072, 0.062
+ ])
+```
+
+- `keypoint_info` contains the information about each keypoint.
+ 1. `name`: the keypoint name. The keypoint name must be unique.
+ 2. `id`: the keypoint id.
+ 3. `color`: (\[B, G, R\]) is used for keypoint visualization.
+ 4. `type`: 'upper' or 'lower', will be used in data augmentation [RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py#L263).
+ 5. `swap`: indicates the 'swap pair' (also known as 'flip pair'). When applying image horizontal flip, the left part will become the right part, used in data augmentation [RandomFlip](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py#L94). We need to flip the keypoints accordingly.
+- `skeleton_info` contains information about the keypoint connectivity, which is used for visualization.
+- `joint_weights` assigns different loss weights to different keypoints.
+- `sigmas` is used to calculate the OKS score. You can read [keypoints-eval](https://cocodataset.org/#keypoints-eval) to learn more about it.
+
+In the model config, the user needs to specify the metainfo path of the custom dataset (e.g. `$MMPOSE/configs/_base_/datasets/{your_dataset}.py`) as follows:
+
+```python
+# dataset and dataloader settings
+dataset_type = 'MyCustomDataset' # or 'CocoDataset'
+
+train_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root of your train data',
+ ann_file='path to your json file',
+ data_prefix=dict(img='path to your train img'),
+ # specify the new dataset meta information config file
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+val_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root of your val data',
+ ann_file='path to your val json',
+ data_prefix=dict(img='path to your val img'),
+ # specify the new dataset meta information config file
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+test_dataloader = val_dataloader
+```
+
+More specifically speaking, if you organize your data as follows:
+
+```shell
+data
+├── annotations
+│ ├── train.json
+│ ├── val.json
+├── train
+│ ├── images
+│ │ ├── 000001.jpg
+├── val
+│ ├── images
+│ │ ├── 000002.jpg
+```
+
+You need to set your config as follows:
+
+```
+dataset=dict(
+ ...
+ data_root='data/',
+ ann_file='annotations/train.json',
+ data_prefix=dict(img='train/images/'),
+ ...),
+```
+
+### Dataset
+
+To use custom dataset in MMPose, we recommend converting the annotations into a supported format (e.g. COCO or MPII) and directly using our implementation of the corresponding dataset. If this is not applicable, you may need to implement your own dataset class.
+
+More details about using custom datasets can be found in [Customize Datasets](./advanced_guides/customize_datasets.md).
+
+```{note}
+If you wish to inherit from the `BaseDataset` provided by [MMEngine](https://github.com/open-mmlab/mmengine). Please refer to this [documents](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html) for details.
+```
+
+#### 2D Dataset
+
+Most 2D keypoint datasets in MMPose **organize the annotations in a COCO-like style**. Thus we provide a base class [BaseCocoStyleDataset](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/datasets/base/base_coco_style_dataset.py) for these datasets. We recommend that users subclass [BaseCocoStyleDataset](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/datasets/base/base_coco_style_dataset.py) and override the methods as needed (usually `__init__()` and `_load_annotations()`) to extend to a new custom 2D keypoint dataset.
+
+```{note}
+Please refer to [COCO](./dataset_zoo/2d_body_keypoint.md) for more details about the COCO data format.
+```
+
+The bbox format in MMPose is in `xyxy` instead of `xywh`, which is consistent with the format used in other OpenMMLab projects like [MMDetection](https://github.com/open-mmlab/mmdetection). We provide useful utils for bbox format conversion, such as `bbox_xyxy2xywh`, `bbox_xywh2xyxy`, `bbox_xyxy2cs`, etc., which are defined in [$MMPOSE/mmpose/structures/bbox/transforms.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/structures/bbox/transforms.py).
+
+Let's take the implementation of the CrowPose dataset ([$MMPOSE/mmpose/datasets/datasets/body/crowdpose_dataset.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/datasets/body/crowdpose_dataset.py)) in COCO format as an example.
+
+```Python
+@DATASETS.register_module()
+class CrowdPoseDataset(BaseCocoStyleDataset):
+ """CrowdPose dataset for pose estimation.
+
+ "CrowdPose: Efficient Crowded Scenes Pose Estimation and
+ A New Benchmark", CVPR'2019.
+ More details can be found in the `paper
+
+
+ + - Concatenate operation + + ```python + neck=dict(type='FeatureMapProcessor', concat=True) + ``` + +

+ + Note that all feature maps will be resized to match the shape of the first feature map (index 0) prior to concatenation. + + - rescale operation + + ```python + neck=dict(type='FeatureMapProcessor', scale_factor=2.0) + ``` + +

+ +### Head + +Generally speaking, Head is often the core of an algorithm, which is used to make predictions and perform loss calculation. + +Modules related to Head in MMPose are defined under [$MMPOSE/mmpose/models/heads](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/heads), and developers need to inherit the base class `BaseHead` when customizing Head and override the following methods: + +- forward() + +- predict() + +- loss() + +Specifically, `predict()` method needs to return pose predictions in the image space, which is obtained from the model output though the decoding function provided by the codec. We implement this process in [BaseHead.decode()](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py). + +On the other hand, we will perform test-time augmentation(TTA) in `predict()`. + +A commonly used TTA is `flip_test`, namely, an image and its flipped version are sent into the model to inference, and the output of the flipped version will be flipped back, then average them to stabilize the prediction. + +Here is an example of `predict()` in [RegressionHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/regression_heads/regression_head.py): + +```Python +def predict(self, + feats: Tuple[Tensor], + batch_data_samples: OptSampleList, + test_cfg: ConfigType = {}) -> Predictions: + """Predict results from outputs.""" + + if test_cfg.get('flip_test', False): + # TTA: flip test -> feats = [orig, flipped] + assert isinstance(feats, list) and len(feats) == 2 + flip_indices = batch_data_samples[0].metainfo['flip_indices'] + input_size = batch_data_samples[0].metainfo['input_size'] + _feats, _feats_flip = feats + _batch_coords = self.forward(_feats) + _batch_coords_flip = flip_coordinates( + self.forward(_feats_flip), + flip_indices=flip_indices, + shift_coords=test_cfg.get('shift_coords', True), + input_size=input_size) + batch_coords = (_batch_coords + _batch_coords_flip) * 0.5 + else: + batch_coords = self.forward(feats) # (B, K, D) + + batch_coords.unsqueeze_(dim=1) # (B, N, K, D) + preds = self.decode(batch_coords) +``` + +The `loss()` not only performs the calculation of loss functions, but also the calculation of training-time metrics such as pose accuracy. The results are carried by a dictionary `losses`: + +```Python + # calculate accuracy +_, avg_acc, _ = keypoint_pck_accuracy( + pred=to_numpy(pred_coords), + gt=to_numpy(keypoint_labels), + mask=to_numpy(keypoint_weights) > 0, + thr=0.05, + norm_factor=np.ones((pred_coords.size(0), 2), dtype=np.float32)) + +acc_pose = torch.tensor(avg_acc, device=keypoint_labels.device) +losses.update(acc_pose=acc_pose) +``` + +The data of each batch is packaged into `batch_data_samples`. Taking the Regression-based method as an example, the normalized coordinates and keypoint weights can be obtained as follows: + +```Python +keypoint_labels = torch.cat( + [d.gt_instance_labels.keypoint_labels for d in batch_data_samples]) +keypoint_weights = torch.cat([ + d.gt_instance_labels.keypoint_weights for d in batch_data_samples +]) +``` + +Here is the complete implementation of `loss()` in [RegressionHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/regression_heads/regression_head.py): + +```Python +def loss(self, + inputs: Tuple[Tensor], + batch_data_samples: OptSampleList, + train_cfg: ConfigType = {}) -> dict: + """Calculate losses from a batch of inputs and data samples.""" + + pred_outputs = self.forward(inputs) + + keypoint_labels = torch.cat( + [d.gt_instance_labels.keypoint_labels for d in batch_data_samples]) + keypoint_weights = torch.cat([ + d.gt_instance_labels.keypoint_weights for d in batch_data_samples + ]) + + # calculate losses + losses = dict() + loss = self.loss_module(pred_outputs, keypoint_labels, + keypoint_weights.unsqueeze(-1)) + + if isinstance(loss, dict): + losses.update(loss) + else: + losses.update(loss_kpt=loss) + + # calculate accuracy + _, avg_acc, _ = keypoint_pck_accuracy( + pred=to_numpy(pred_outputs), + gt=to_numpy(keypoint_labels), + mask=to_numpy(keypoint_weights) > 0, + thr=0.05, + norm_factor=np.ones((pred_outputs.size(0), 2), dtype=np.float32)) + acc_pose = torch.tensor(avg_acc, device=keypoint_labels.device) + losses.update(acc_pose=acc_pose) + + return losses +``` + +```{note} +If you wish to learn more about the implementation of Model, like: +- Head with Keypoints Visibility Prediction +- Pose Lifting Models + +please refer to [Advanced Guides - Implement New Model](./advanced_guides/implement_new_models.md) for more details. +``` diff --git a/docs/en/index.rst b/docs/en/index.rst new file mode 100644 index 0000000000000000000000000000000000000000..2c96751d7a947f9deb237d93cf5e4d9cbf3c4870 --- /dev/null +++ b/docs/en/index.rst @@ -0,0 +1,118 @@ +Welcome to MMPose's documentation! +================================== + +You can change the documentation language at the lower-left corner of the page. + +您可以在页面左下角切换文档语言。 + +.. toctree:: + :maxdepth: 1 + :caption: Get Started + + overview.md + installation.md + guide_to_framework.md + demos.md + contribution_guide.md + faq.md + +.. toctree:: + :maxdepth: 1 + :caption: User Guides + + user_guides/inference.md + user_guides/configs.md + user_guides/prepare_datasets.md + user_guides/train_and_test.md + user_guides/how_to_deploy.md + user_guides/model_analysis.md + user_guides/dataset_tools.md + +.. toctree:: + :maxdepth: 1 + :caption: Advanced Guides + + advanced_guides/codecs.md + advanced_guides/dataflow.md + advanced_guides/implement_new_models.md + advanced_guides/customize_datasets.md + advanced_guides/customize_transforms.md + advanced_guides/customize_evaluation.md + advanced_guides/customize_optimizer.md + advanced_guides/customize_logging.md + +.. toctree:: + :maxdepth: 1 + :caption: Migration + + migration.md + +.. toctree:: + :maxdepth: 2 + :caption: Model Zoo + + model_zoo.txt + model_zoo/body_2d_keypoint.md + model_zoo/body_3d_keypoint.md + model_zoo/face_2d_keypoint.md + model_zoo/hand_2d_keypoint.md + model_zoo/wholebody_2d_keypoint.md + model_zoo/animal_2d_keypoint.md + +.. toctree:: + :maxdepth: 2 + :caption: Model Zoo (by paper) + + model_zoo_papers/algorithms.md + model_zoo_papers/backbones.md + model_zoo_papers/techniques.md + model_zoo_papers/datasets.md + +.. toctree:: + :maxdepth: 2 + :caption: Dataset Zoo + + dataset_zoo.md + dataset_zoo/2d_body_keypoint.md + dataset_zoo/2d_wholebody_keypoint.md + dataset_zoo/2d_face_keypoint.md + dataset_zoo/2d_hand_keypoint.md + dataset_zoo/2d_fashion_landmark.md + dataset_zoo/2d_animal_keypoint.md + dataset_zoo/3d_body_keypoint.md + dataset_zoo/3d_hand_keypoint.md + dataset_zoo/3d_wholebody_keypoint.md + +.. toctree:: + :maxdepth: 1 + :caption: Projects + + projects/community_projects.md + projects/projects.md + +.. toctree:: + :maxdepth: 1 + :caption: Notes + + notes/ecosystem.md + notes/changelog.md + notes/benchmark.md + notes/pytorch_2.md + +.. toctree:: + :caption: API Reference + + api.rst + +.. toctree:: + :caption: Switch Language + + switch_language.md + + + +Indices and tables +================== + +* :ref:`genindex` +* :ref:`search` diff --git a/docs/en/installation.md b/docs/en/installation.md new file mode 100644 index 0000000000000000000000000000000000000000..4140d9ad4011433bdba4f5c89bf946660ef25d85 --- /dev/null +++ b/docs/en/installation.md @@ -0,0 +1,263 @@ +# Installation + +We recommend that users follow our best practices to install MMPose. However, the whole process is highly customizable. See [Customize Installation](#customize-installation) section for more information. + +- [Installation](#installation) + - [Prerequisites](#prerequisites) + - [Best Practices](#best-practices) + - [Build MMPose from source](#build-mmpose-from-source) + - [Install as a Python package](#install-as-a-python-package) + - [Customize Installation](#customize-installation) + - [CUDA versions](#cuda-versions) + - [Install MMEngine without MIM](#install-mmengine-without-mim) + - [Install MMCV without MIM](#install-mmcv-without-mim) + - [Install on CPU-only platforms](#install-on-cpu-only-platforms) + - [Install on Google Colab](#install-on-google-colab) + - [Using MMPose with Docker](#using-mmpose-with-docker) + - [Verify the installation](#verify-the-installation) + - [Trouble shooting](#trouble-shooting) + + + +## Prerequisites + +In this section we demonstrate how to prepare an environment with PyTorch. + +MMPose works on Linux, Windows and macOS. It requires Python 3.7+, CUDA 9.2+ and PyTorch 1.8+. + +If you are experienced with PyTorch and have already installed it, you can skip this part and jump to the [MMPose Installation](#install-mmpose). Otherwise, you can follow these steps for the preparation. + +**Step 0.** Download and install Miniconda from the [official website](https://docs.conda.io/en/latest/miniconda.html). + +**Step 1.** Create a conda environment and activate it. + +```shell +conda create --name openmmlab python=3.8 -y +conda activate openmmlab +``` + +**Step 2.** Install PyTorch following [official instructions](https://pytorch.org/get-started/locally/), e.g. + +On GPU platforms: + +```shell +conda install pytorch torchvision -c pytorch +``` + +```{warning} +This command will automatically install the latest version PyTorch and cudatoolkit, please check whether they match your environment. +``` + +On CPU platforms: + +```shell +conda install pytorch torchvision cpuonly -c pytorch +``` + +**Step 3.** Install [MMEngine](https://github.com/open-mmlab/mmengine) and [MMCV](https://github.com/open-mmlab/mmcv/tree/2.x) using [MIM](https://github.com/open-mmlab/mim). + +```shell +pip install -U openmim +mim install mmengine +mim install "mmcv>=2.0.1" +``` + +Note that some of the demo scripts in MMPose require [MMDetection](https://github.com/open-mmlab/mmdetection) (mmdet) for human detection. If you want to run these demo scripts with mmdet, you can easily install mmdet as a dependency by running: + +```shell +mim install "mmdet>=3.1.0" +``` + +```{note} +Here are the version correspondences between mmdet, mmpose and mmcv: + +- mmdet 2.x <=> mmpose 0.x <=> mmcv 1.x +- mmdet 3.x <=> mmpose 1.x <=> mmcv 2.x + +If you encounter version incompatibility issues, please check the correspondence using `pip list | grep mm` and upgrade or downgrade the dependencies accordingly. Please note that `mmcv-full` is only for `mmcv 1.x`, so please uninstall it first, and then use `mim install mmcv` to install `mmcv 2.x`. +``` + +## Best Practices + +### Build MMPose from source + +To develop and run mmpose directly, install it from source: + +```shell +git clone https://github.com/open-mmlab/mmpose.git +cd mmpose +pip install -r requirements.txt +pip install -v -e . +# "-v" means verbose, or more output +# "-e" means installing a project in editable mode, +# thus any local modifications made to the code will take effect without reinstallation. +``` + +### Install as a Python package + +To use mmpose as a dependency or third-party package, install it with pip: + +```shell +mim install "mmpose>=1.1.0" +``` + +## Verify the installation + +To verify that MMPose is installed correctly, you can run an inference demo with the following steps. + +**Step 1.** We need to download config and checkpoint files. + +```shell +mim download mmpose --config td-hm_hrnet-w48_8xb32-210e_coco-256x192 --dest . +``` + +The downloading will take several seconds or more, depending on your network environment. When it is done, you will find two files `td-hm_hrnet-w48_8xb32-210e_coco-256x192.py` and `td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth` in your current folder. + +**Step 2.** Run the inference demo. + +Option (A). If you install mmpose from source, just run the following command under the folder `$MMPOSE`: + +```shell +python demo/image_demo.py \ + tests/data/coco/000000000785.jpg \ + td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \ + td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth \ + --out-file vis_results.jpg \ + --draw-heatmap +``` + +If everything goes fine, you will be able to get the following visualization result from `vis_results.jpg` in your current folder, which displays the predicted keypoints and heatmaps overlaid on the person in the image. + + + +Option (B). If you install mmpose with pip, open you python interpreter and copy & paste the following codes. + +```python +from mmpose.apis import inference_topdown, init_model +from mmpose.utils import register_all_modules + +register_all_modules() + +config_file = 'td-hm_hrnet-w48_8xb32-210e_coco-256x192.py' +checkpoint_file = 'td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth' +model = init_model(config_file, checkpoint_file, device='cpu') # or device='cuda:0' + +# please prepare an image with person +results = inference_topdown(model, 'demo.jpg') +``` + +The `demo.jpg` can be downloaded from [Github](https://raw.githubusercontent.com/open-mmlab/mmpose/main/tests/data/coco/000000000785.jpg). + +The inference results will be a list of `PoseDataSample`, and the predictions are in the `pred_instances`, indicating the detected keypoint locations and scores. + +```{note} +MMCV version should match PyTorch version strictly. If you encounter the following issues: + +- No module named 'mmcv.ops' +- No module named 'mmcv._ext' + +It means that the current PyTorch version does not match the CUDA version. You can check the CUDA version using `nvidia-smi`, and it should match the `+cu1xx` in PyTorch version in `pip list | grep torch`. Otherwise, you need to uninstall PyTorch and reinstall it, then reinstall MMCV (the installation order **CAN NOT** be swapped). +``` + +## Customize Installation + +### CUDA versions + +When installing PyTorch, you need to specify the version of CUDA. If you are not clear on which to choose, follow our recommendations: + +- For Ampere-based NVIDIA GPUs, such as GeForce 30 series and NVIDIA A100, CUDA 11 is a must. +- For older NVIDIA GPUs, CUDA 11 is backward compatible, but CUDA 10.2 offers better compatibility and is more lightweight. + +Please make sure the GPU driver satisfies the minimum version requirements. See [this table](https://docs.nvidia.com/cuda/cuda-toolkit-release-notes/index.html#cuda-major-component-versions__table-cuda-toolkit-driver-versions) for more information. + +Installing CUDA runtime libraries is enough if you follow our best practices, because no CUDA code will be compiled locally. However if you hope to compile MMCV from source or develop other CUDA operators, you need to install the complete CUDA toolkit from NVIDIA's [website](https://developer.nvidia.com/cuda-downloads), and its version should match the CUDA version of PyTorch. i.e., the specified version of cudatoolkit in `conda install` command. + +### Install MMEngine without MIM + +To install MMEngine with pip instead of MIM, please follow [MMEngine installation guides](https://mmengine.readthedocs.io/zh_CN/latest/get_started/installation.html). + +For example, you can install MMEngine by the following command. + +```shell +pip install mmengine +``` + +### Install MMCV without MIM + +MMCV contains C++ and CUDA extensions, thus depending on PyTorch in a complex way. MIM solves such dependencies automatically and makes the installation easier. However, it is not a must. + +To install MMCV with pip instead of MIM, please follow [MMCV installation guides](https://mmcv.readthedocs.io/en/2.x/get_started/installation.html). This requires manually specifying a find-url based on PyTorch version and its CUDA version. + +For example, the following command install mmcv built for PyTorch 1.10.x and CUDA 11.3. + +```shell +pip install 'mmcv>=2.0.1' -f https://download.openmmlab.com/mmcv/dist/cu113/torch1.10/index.html +``` + +### Install on CPU-only platforms + +MMPose can be built for CPU only environment. In CPU mode you can train, test or inference a model. + +However, some functionalities are missing in this mode, usually GPU-compiled ops like `Deformable Convolution`. Most models in MMPose don't depend on these ops, but if you try to train/test/infer a model containing these ops, an error will be raised. + +### Install on Google Colab + +[Google Colab](https://colab.research.google.com/) usually has PyTorch installed, +thus we only need to install MMEngine, MMCV and MMPose with the following commands. + +**Step 1.** Install [MMEngine](https://github.com/open-mmlab/mmengine) and [MMCV](https://github.com/open-mmlab/mmcv/tree/2.x) using [MIM](https://github.com/open-mmlab/mim). + +```shell +!pip3 install openmim +!mim install mmengine +!mim install "mmcv>=2.0.1" +``` + +**Step 2.** Install MMPose from the source. + +```shell +!git clone https://github.com/open-mmlab/mmpose.git +%cd mmpose +!pip install -e . +``` + +**Step 3.** Verification. + +```python +import mmpose +print(mmpose.__version__) +# Example output: 1.1.0 +``` + +```{note} +Note that within Jupyter, the exclamation mark `!` is used to call external executables and `%cd` is a [magic command](https://ipython.readthedocs.io/en/stable/interactive/magics.html#magic-cd) to change the current working directory of Python. +``` + +### Using MMPose with Docker + +We provide a [Dockerfile](https://github.com/open-mmlab/mmpose/blob/master/docker/Dockerfile) to build an image. Ensure that your [docker version](https://docs.docker.com/engine/install/) >=19.03. + +```shell +# build an image with PyTorch 1.8.0, CUDA 10.1, CUDNN 7. +# If you prefer other versions, just modified the Dockerfile +docker build -t mmpose docker/ +``` + +**Important:** Make sure you've installed the [nvidia-container-toolkit](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker). + +Run it with + +```shell +docker run --gpus all --shm-size=8g -it -v {DATA_DIR}:/mmpose/data mmpose +``` + +`{DATA_DIR}` is your local folder containing all the datasets for mmpose. + +```{note} +If you encounter the error message like `permission denied`, please add `sudo` at the start of the command and try it again. +``` + +## Trouble shooting + +If you have some issues during the installation, please first view the [FAQ](./faq.md) page. +You may [open an issue](https://github.com/open-mmlab/mmpose/issues/new/choose) on GitHub if no solution is found. diff --git a/docs/en/make.bat b/docs/en/make.bat new file mode 100644 index 0000000000000000000000000000000000000000..922152e96a04a242e6fc40f124261d74890617d8 --- /dev/null +++ b/docs/en/make.bat @@ -0,0 +1,35 @@ +@ECHO OFF + +pushd %~dp0 + +REM Command file for Sphinx documentation + +if "%SPHINXBUILD%" == "" ( + set SPHINXBUILD=sphinx-build +) +set SOURCEDIR=. +set BUILDDIR=_build + +if "%1" == "" goto help + +%SPHINXBUILD% >NUL 2>NUL +if errorlevel 9009 ( + echo. + echo.The 'sphinx-build' command was not found. Make sure you have Sphinx + echo.installed, then set the SPHINXBUILD environment variable to point + echo.to the full path of the 'sphinx-build' executable. Alternatively you + echo.may add the Sphinx directory to PATH. + echo. + echo.If you don't have Sphinx installed, grab it from + echo.http://sphinx-doc.org/ + exit /b 1 +) + +%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O% +goto end + +:help +%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O% + +:end +popd diff --git a/docs/en/merge_docs.sh b/docs/en/merge_docs.sh new file mode 100644 index 0000000000000000000000000000000000000000..23af31dd5646c14a5b787658c7fa0c3d17297ac1 --- /dev/null +++ b/docs/en/merge_docs.sh @@ -0,0 +1,31 @@ +#!/usr/bin/env bash +# Copyright (c) OpenMMLab. All rights reserved. + +sed -i '$a\\n' ../../demo/docs/en/*_demo.md +cat ../../demo/docs/en/*_demo.md | sed "s/^## 2D\(.*\)Demo/##\1Estimation/" | sed "s/md###t/html#t/g" | sed '1i\# Demos\n' | sed 's=](/docs/en/=](/=g' | sed 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' >demos.md + + # remove /docs/ for link used in doc site +sed -i 's=](/docs/en/=](=g' overview.md +sed -i 's=](/docs/en/=](=g' installation.md +sed -i 's=](/docs/en/=](=g' quick_run.md +sed -i 's=](/docs/en/=](=g' migration.md +sed -i 's=](/docs/en/=](=g' ./model_zoo/*.md +sed -i 's=](/docs/en/=](=g' ./model_zoo_papers/*.md +sed -i 's=](/docs/en/=](=g' ./user_guides/*.md +sed -i 's=](/docs/en/=](=g' ./advanced_guides/*.md +sed -i 's=](/docs/en/=](=g' ./dataset_zoo/*.md +sed -i 's=](/docs/en/=](=g' ./notes/*.md +sed -i 's=](/docs/en/=](=g' ./projects/*.md + + +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' overview.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' installation.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' quick_run.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' migration.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./advanced_guides/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./model_zoo/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./model_zoo_papers/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./user_guides/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./dataset_zoo/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./notes/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./projects/*.md diff --git a/docs/en/migration.md b/docs/en/migration.md new file mode 100644 index 0000000000000000000000000000000000000000..a3e0099bc7e69d5bbdfe6c3f545fba6313800ecb --- /dev/null +++ b/docs/en/migration.md @@ -0,0 +1,220 @@ +# How to Migrate MMPose 0.x Projects to MMPose 1.0 + +MMPose 1.0 has been refactored extensively and addressed many legacy issues. Most of the code in MMPose 1.0 will not be compatible with 0.x version. + +To try our best to help you migrate your code and model, here are some major changes: + +## Data Transformation + +### Translation, Rotation and Scaling + +The transformation methods `TopDownRandomShiftBboxCenter` and `TopDownGetRandomScaleRotation` in old version, will be merged into `RandomBBoxTransform`. + +```Python +@TRANSFORMS.register_module() +class RandomBBoxTransform(BaseTransform): + r"""Rnadomly shift, resize and rotate the bounding boxes. + + Required Keys: + + - bbox_center + - bbox_scale + + Modified Keys: + + - bbox_center + - bbox_scale + + Added Keys: + - bbox_rotation + + Args: + shift_factor (float): Randomly shift the bbox in range + :math:`[-dx, dx]` and :math:`[-dy, dy]` in X and Y directions, + where :math:`dx(y) = x(y)_scale \cdot shift_factor` in pixels. + Defaults to 0.16 + shift_prob (float): Probability of applying random shift. Defaults to + 0.3 + scale_factor (Tuple[float, float]): Randomly resize the bbox in range + :math:`[scale_factor[0], scale_factor[1]]`. Defaults to (0.5, 1.5) + scale_prob (float): Probability of applying random resizing. Defaults + to 1.0 + rotate_factor (float): Randomly rotate the bbox in + :math:`[-rotate_factor, rotate_factor]` in degrees. Defaults + to 80.0 + rotate_prob (float): Probability of applying random rotation. Defaults + to 0.6 + """ + + def __init__(self, + shift_factor: float = 0.16, + shift_prob: float = 0.3, + scale_factor: Tuple[float, float] = (0.5, 1.5), + scale_prob: float = 1.0, + rotate_factor: float = 80.0, + rotate_prob: float = 0.6) -> None: +``` + +### Target Generation + +The old methods like: + +- `TopDownGenerateTarget` +- `TopDownGenerateTargetRegression` +- `BottomUpGenerateHeatmapTarget` +- `BottomUpGenerateTarget` + +will be merged in to `GenerateTarget`, and the actual generation methods are implemented in [Codec](./user_guides/codecs.md). + +```Python +@TRANSFORMS.register_module() +class GenerateTarget(BaseTransform): + """Encode keypoints into Target. + + The generated target is usually the supervision signal of the model + learning, e.g. heatmaps or regression labels. + + Required Keys: + + - keypoints + - keypoints_visible + - dataset_keypoint_weights + + Added Keys: + + - The keys of the encoded items from the codec will be updated into + the results, e.g. ``'heatmaps'`` or ``'keypoint_weights'``. See + the specific codec for more details. + + Args: + encoder (dict | list[dict]): The codec config for keypoint encoding. + Both single encoder and multiple encoders (given as a list) are + supported + multilevel (bool): Determine the method to handle multiple encoders. + If ``multilevel==True``, generate multilevel targets from a group + of encoders of the same type (e.g. multiple :class:`MSRAHeatmap` + encoders with different sigma values); If ``multilevel==False``, + generate combined targets from a group of different encoders. This + argument will have no effect in case of single encoder. Defaults + to ``False`` + use_dataset_keypoint_weights (bool): Whether use the keypoint weights + from the dataset meta information. Defaults to ``False`` + """ + + def __init__(self, + encoder: MultiConfig, + multilevel: bool = False, + use_dataset_keypoint_weights: bool = False) -> None: +``` + +### Data Normalization + +The data normalization operations `NormalizeTensor` and `ToTensor` will be replaced by **DataPreprocessor** module, which will no longer be used as a preprocessing operation, but will be merged as a part of the model forward propagation. + +The 3D normalization methods like + +- `GetRootCenteredPose` +- `ImageCoordinateNormalization` +- `NormalizeJointCoordinate` + +will be merged into codecs, for example [`ImagePoseLifting`](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/image_pose_lifting.py#L11) and [`VideoPoseLifting`](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/video_pose_lifting.py#L13). + +The data conversion and reshaping operation `PoseSequenceToTensor` will be implemented in corresponding codecs and [`PackPoseInputs`](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/formatting.py). + +## Compatibility of Models + +We have performed compatibility with the model weights provided by model zoo to ensure that the same model weights can get a comparable accuracy in both version. But note that due to the large number of differences in processing details, the inference outputs can be slightly different(less than 0.05% difference in accuracy). + +For model weights saved by training with 0.x version, we provide a `_load_state_dict_pre_hook()` method in Head to replace the old version of the `state_dict` with the new one. If you wish to make your model compatible with MMPose 1.0, you can refer to our implementation as follows. + +```Python +@MODELS.register_module() +class YourHead(BaseHead): +def __init__(self): + + ## omitted + + # Register the hook to automatically convert old version state dicts + self._register_load_state_dict_pre_hook(self._load_state_dict_pre_hook) +``` + +### Heatmap-based Model + +For models based on `SimpleBaseline` approach, developers need to pay attention to the last convolutional layer. + +```Python +def _load_state_dict_pre_hook(self, state_dict, prefix, local_meta, *args, + **kwargs): + version = local_meta.get('version', None) + + if version and version >= self._version: + return + + # convert old-version state dict + keys = list(state_dict.keys()) + for _k in keys: + if not _k.startswith(prefix): + continue + v = state_dict.pop(_k) + k = _k[len(prefix):] + # In old version, "final_layer" includes both intermediate + # conv layers (new "conv_layers") and final conv layers (new + # "final_layer"). + # + # If there is no intermediate conv layer, old "final_layer" will + # have keys like "final_layer.xxx", which should be still + # named "final_layer.xxx"; + # + # If there are intermediate conv layers, old "final_layer" will + # have keys like "final_layer.n.xxx", where the weights of the last + # one should be renamed "final_layer.xxx", and others should be + # renamed "conv_layers.n.xxx" + k_parts = k.split('.') + if k_parts[0] == 'final_layer': + if len(k_parts) == 3: + assert isinstance(self.conv_layers, nn.Sequential) + idx = int(k_parts[1]) + if idx < len(self.conv_layers): + # final_layer.n.xxx -> conv_layers.n.xxx + k_new = 'conv_layers.' + '.'.join(k_parts[1:]) + else: + # final_layer.n.xxx -> final_layer.xxx + k_new = 'final_layer.' + k_parts[2] + else: + # final_layer.xxx remains final_layer.xxx + k_new = k + else: + k_new = k + + state_dict[prefix + k_new] = v +``` + +### RLE-based Model + +For the RLE-based models, since the loss module is renamed to `loss_module` in MMPose 1.0, and the flow model is subsumed under the loss module, changes need to be made to the keys in `state_dict`: + +```Python +def _load_state_dict_pre_hook(self, state_dict, prefix, local_meta, *args, + **kwargs): + + version = local_meta.get('version', None) + + if version and version >= self._version: + return + + # convert old-version state dict + keys = list(state_dict.keys()) + for _k in keys: + v = state_dict.pop(_k) + k = _k.lstrip(prefix) + # In old version, "loss" includes the instances of loss, + # now it should be renamed "loss_module" + k_parts = k.split('.') + if k_parts[0] == 'loss': + # loss.xxx -> loss_module.xxx + k_new = prefix + 'loss_module.' + '.'.join(k_parts[1:]) + else: + k_new = _k + + state_dict[k_new] = v +``` diff --git a/docs/en/notes/benchmark.md b/docs/en/notes/benchmark.md new file mode 100644 index 0000000000000000000000000000000000000000..8c82383f8cd84fb9270068d9f529f0124ce48a9c --- /dev/null +++ b/docs/en/notes/benchmark.md @@ -0,0 +1,46 @@ +# Benchmark + +We compare our results with some popular frameworks and official releases in terms of speed and accuracy. + +## Comparison Rules + +Here we compare our MMPose repo with other pose estimation toolboxes in the same data and model settings. + +To ensure the fairness of the comparison, the comparison experiments were conducted under the same hardware environment and using the same dataset. +For each model setting, we kept the same data pre-processing methods to make sure the same feature input. +In addition, we also used Memcached, a distributed memory-caching system, to load the data in all the compared toolboxes. +This minimizes the IO time during benchmark. + +The time we measured is the average training time for an iteration, including data processing and model training. +The training speed is measure with s/iter. The lower, the better. + +### Results on COCO val2017 with detector having human AP of 56.4 on COCO val2017 dataset + +We demonstrate the superiority of our MMPose framework in terms of speed and accuracy on the standard COCO keypoint detection benchmark. +The mAP (the mean average precision) is used as the evaluation metric. + +| Model | Input size | MMPose (s/iter) | HRNet (s/iter) | MMPose (mAP) | HRNet (mAP) | +| :--------- | :--------: | :-------------: | :------------: | :----------: | :---------: | +| resnet_50 | 256x192 | **0.28** | 0.64 | **0.718** | 0.704 | +| resnet_50 | 384x288 | **0.81** | 1.24 | **0.731** | 0.722 | +| resnet_101 | 256x192 | **0.36** | 0.84 | **0.726** | 0.714 | +| resnet_101 | 384x288 | **0.79** | 1.53 | **0.748** | 0.736 | +| resnet_152 | 256x192 | **0.49** | 1.00 | **0.735** | 0.720 | +| resnet_152 | 384x288 | **0.96** | 1.65 | **0.750** | 0.743 | +| hrnet_w32 | 256x192 | **0.54** | 1.31 | **0.746** | 0.744 | +| hrnet_w32 | 384x288 | **0.76** | 2.00 | **0.760** | 0.758 | +| hrnet_w48 | 256x192 | **0.66** | 1.55 | **0.756** | 0.751 | +| hrnet_w48 | 384x288 | **1.23** | 2.20 | **0.767** | 0.763 | + +## Hardware + +- 8 NVIDIA Tesla V100 (32G) GPUs +- Intel(R) Xeon(R) Gold 6148 CPU @ 2.40GHz + +## Software Environment + +- Python 3.7 +- PyTorch 1.4 +- CUDA 10.1 +- CUDNN 7.6.03 +- NCCL 2.4.08 diff --git a/docs/en/notes/changelog.md b/docs/en/notes/changelog.md new file mode 100644 index 0000000000000000000000000000000000000000..27f46047e2d2f658a79bffeff3a02e86f661bdf2 --- /dev/null +++ b/docs/en/notes/changelog.md @@ -0,0 +1,1334 @@ +# Changelog + +## **v1.3.1 (11/01/2024)** + +Fix the bug when downloading config and checkpoint using `mim` (see [Issue #2918](https://github.com/open-mmlab/mmpose/issues/2918)). + +## **v1.3.0 (04/01/2024)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0 + +## **v1.2.0 (12/10/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.2.0 + +## **v1.1.0 (04/07/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.1.0 + +## **v1.0.0 (06/04/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.0.0 + +## **v1.0.0rc1 (14/10/2022)** + +**Highlights** + +- Release RTMPose, a high-performance real-time pose estimation algorithm with cross-platform deployment and inference support. See details at the [project page](/projects/rtmpose/) +- Support several new algorithms: ViTPose (arXiv'2022), CID (CVPR'2022), DEKR (CVPR'2021) +- Add Inferencer, a convenient inference interface that perform pose estimation and visualization on images, videos and webcam streams with only one line of code +- Introduce *Project*, a new form for rapid and easy implementation of new algorithms and features in MMPose, which is more handy for community contributors + +**New Features** + +- Support RTMPose ([#1971](https://github.com/open-mmlab/mmpose/pull/1971), [#2024](https://github.com/open-mmlab/mmpose/pull/2024), [#2028](https://github.com/open-mmlab/mmpose/pull/2028), [#2030](https://github.com/open-mmlab/mmpose/pull/2030), [#2040](https://github.com/open-mmlab/mmpose/pull/2040), [#2057](https://github.com/open-mmlab/mmpose/pull/2057)) +- Support Inferencer ([#1969](https://github.com/open-mmlab/mmpose/pull/1969)) +- Support ViTPose ([#1876](https://github.com/open-mmlab/mmpose/pull/1876), [#2056](https://github.com/open-mmlab/mmpose/pull/2056), [#2058](https://github.com/open-mmlab/mmpose/pull/2058), [#2065](https://github.com/open-mmlab/mmpose/pull/2065)) +- Support CID ([#1907](https://github.com/open-mmlab/mmpose/pull/1907)) +- Support DEKR ([#1834](https://github.com/open-mmlab/mmpose/pull/1834), [#1901](https://github.com/open-mmlab/mmpose/pull/1901)) +- Support training with multiple datasets ([#1767](https://github.com/open-mmlab/mmpose/pull/1767), [#1930](https://github.com/open-mmlab/mmpose/pull/1930), [#1938](https://github.com/open-mmlab/mmpose/pull/1938), [#2025](https://github.com/open-mmlab/mmpose/pull/2025)) +- Add *project* to allow rapid and easy implementation of new models and features ([#1914](https://github.com/open-mmlab/mmpose/pull/1914)) + +**Improvements** + +- Improve documentation quality ([#1846](https://github.com/open-mmlab/mmpose/pull/1846), [#1858](https://github.com/open-mmlab/mmpose/pull/1858), [#1872](https://github.com/open-mmlab/mmpose/pull/1872), [#1899](https://github.com/open-mmlab/mmpose/pull/1899), [#1925](https://github.com/open-mmlab/mmpose/pull/1925), [#1945](https://github.com/open-mmlab/mmpose/pull/1945), [#1952](https://github.com/open-mmlab/mmpose/pull/1952), [#1990](https://github.com/open-mmlab/mmpose/pull/1990), [#2023](https://github.com/open-mmlab/mmpose/pull/2023), [#2042](https://github.com/open-mmlab/mmpose/pull/2042)) +- Support visualizing keypoint indices ([#2051](https://github.com/open-mmlab/mmpose/pull/2051)) +- Support OpenPose style visualization ([#2055](https://github.com/open-mmlab/mmpose/pull/2055)) +- Accelerate image transpose in data pipelines with tensor operation ([#1976](https://github.com/open-mmlab/mmpose/pull/1976)) +- Support auto-import modules from registry ([#1961](https://github.com/open-mmlab/mmpose/pull/1961)) +- Support keypoint partition metric ([#1944](https://github.com/open-mmlab/mmpose/pull/1944)) +- Support SimCC 1D-heatmap visualization ([#1912](https://github.com/open-mmlab/mmpose/pull/1912)) +- Support saving predictions and data metainfo in demos ([#1814](https://github.com/open-mmlab/mmpose/pull/1814), [#1879](https://github.com/open-mmlab/mmpose/pull/1879)) +- Support SimCC with DARK ([#1870](https://github.com/open-mmlab/mmpose/pull/1870)) +- Remove Gaussian blur for offset maps in UDP-regress ([#1815](https://github.com/open-mmlab/mmpose/pull/1815)) +- Refactor encoding interface of Codec for better extendibility and easier configuration ([#1781](https://github.com/open-mmlab/mmpose/pull/1781)) +- Support evaluating CocoMetric without annotation file ([#1722](https://github.com/open-mmlab/mmpose/pull/1722)) +- Improve unit tests ([#1765](https://github.com/open-mmlab/mmpose/pull/1765)) + +**Bug Fixes** + +- Fix repeated warnings from different ranks ([#2053](https://github.com/open-mmlab/mmpose/pull/2053)) +- Avoid frequent scope switching when using mmdet inference api ([#2039](https://github.com/open-mmlab/mmpose/pull/2039)) +- Remove EMA parameters and message hub data when publishing model checkpoints ([#2036](https://github.com/open-mmlab/mmpose/pull/2036)) +- Fix metainfo copying in dataset class ([#2017](https://github.com/open-mmlab/mmpose/pull/2017)) +- Fix top-down demo bug when there is no object detected ([#2007](https://github.com/open-mmlab/mmpose/pull/2007)) +- Fix config errors ([#1882](https://github.com/open-mmlab/mmpose/pull/1882), [#1906](https://github.com/open-mmlab/mmpose/pull/1906), [#1995](https://github.com/open-mmlab/mmpose/pull/1995)) +- Fix image demo failure when GUI is unavailable ([#1968](https://github.com/open-mmlab/mmpose/pull/1968)) +- Fix bug in AdaptiveWingLoss ([#1953](https://github.com/open-mmlab/mmpose/pull/1953)) +- Fix incorrect importing of RepeatDataset which is deprecated ([#1943](https://github.com/open-mmlab/mmpose/pull/1943)) +- Fix bug in bottom-up datasets that ignores images without instances ([#1752](https://github.com/open-mmlab/mmpose/pull/1752), [#1936](https://github.com/open-mmlab/mmpose/pull/1936)) +- Fix upstream dependency issues ([#1867](https://github.com/open-mmlab/mmpose/pull/1867), [#1921](https://github.com/open-mmlab/mmpose/pull/1921)) +- Fix evaluation issues and update results ([#1763](https://github.com/open-mmlab/mmpose/pull/1763), [#1773](https://github.com/open-mmlab/mmpose/pull/1773), [#1780](https://github.com/open-mmlab/mmpose/pull/1780), [#1850](https://github.com/open-mmlab/mmpose/pull/1850), [#1868](https://github.com/open-mmlab/mmpose/pull/1868)) +- Fix local registry missing warnings ([#1849](https://github.com/open-mmlab/mmpose/pull/1849)) +- Remove deprecated scripts for model deployment ([#1845](https://github.com/open-mmlab/mmpose/pull/1845)) +- Fix a bug in input transformation in BaseHead ([#1843](https://github.com/open-mmlab/mmpose/pull/1843)) +- Fix an interface mismatch with MMDetection in webcam demo ([#1813](https://github.com/open-mmlab/mmpose/pull/1813)) +- Fix a bug in heatmap visualization that causes incorrect scale ([#1800](https://github.com/open-mmlab/mmpose/pull/1800)) +- Add model metafiles ([#1768](https://github.com/open-mmlab/mmpose/pull/1768)) + +## **v1.0.0rc0 (14/10/2022)** + +**New Features** + +- Support 4 light-weight pose estimation algorithms: [SimCC](https://doi.org/10.48550/arxiv.2107.03332) (ECCV'2022), [Debias-IPR](https://openaccess.thecvf.com/content/ICCV2021/papers/Gu_Removing_the_Bias_of_Integral_Pose_Regression_ICCV_2021_paper.pdf) (ICCV'2021), [IPR](https://arxiv.org/abs/1711.08229) (ECCV'2018), and [DSNT](https://arxiv.org/abs/1801.07372v2) (ArXiv'2018) ([#1628](https://github.com/open-mmlab/mmpose/pull/1628)) + +**Migrations** + +- Add Webcam API in MMPose 1.0 ([#1638](https://github.com/open-mmlab/mmpose/pull/1638), [#1662](https://github.com/open-mmlab/mmpose/pull/1662)) @Ben-Louis +- Add codec for Associative Embedding (beta) ([#1603](https://github.com/open-mmlab/mmpose/pull/1603)) @ly015 + +**Improvements** + +- Add a colab tutorial for MMPose 1.0 ([#1660](https://github.com/open-mmlab/mmpose/pull/1660)) @Tau-J +- Add model index in config folder ([#1710](https://github.com/open-mmlab/mmpose/pull/1710), [#1709](https://github.com/open-mmlab/mmpose/pull/1709), [#1627](https://github.com/open-mmlab/mmpose/pull/1627)) @ly015, @Tau-J, @Ben-Louis +- Update and improve documentation ([#1692](https://github.com/open-mmlab/mmpose/pull/1692), [#1656](https://github.com/open-mmlab/mmpose/pull/1656), [#1681](https://github.com/open-mmlab/mmpose/pull/1681), [#1677](https://github.com/open-mmlab/mmpose/pull/1677), [#1664](https://github.com/open-mmlab/mmpose/pull/1664), [#1659](https://github.com/open-mmlab/mmpose/pull/1659)) @Tau-J, @Ben-Louis, @liqikai9 +- Improve config structures and formats ([#1651](https://github.com/open-mmlab/mmpose/pull/1651)) @liqikai9 + +**Bug Fixes** + +- Update mmengine version requirements ([#1715](https://github.com/open-mmlab/mmpose/pull/1715)) @Ben-Louis +- Update dependencies of pre-commit hooks ([#1705](https://github.com/open-mmlab/mmpose/pull/1705)) @Ben-Louis +- Fix mmcv version in DockerFile ([#1704](https://github.com/open-mmlab/mmpose/pull/1704)) +- Fix a bug in setting dataset metainfo in configs ([#1684](https://github.com/open-mmlab/mmpose/pull/1684)) @ly015 +- Fix a bug in UDP training ([#1682](https://github.com/open-mmlab/mmpose/pull/1682)) @liqikai9 +- Fix a bug in Dark decoding ([#1676](https://github.com/open-mmlab/mmpose/pull/1676)) @liqikai9 +- Fix bugs in visualization ([#1671](https://github.com/open-mmlab/mmpose/pull/1671), [#1668](https://github.com/open-mmlab/mmpose/pull/1668), [#1657](https://github.com/open-mmlab/mmpose/pull/1657)) @liqikai9, @Ben-Louis +- Fix incorrect flops calculation ([#1669](https://github.com/open-mmlab/mmpose/pull/1669)) @liqikai9 +- Fix `tensor.tile` compatibility issue for pytorch 1.6 ([#1658](https://github.com/open-mmlab/mmpose/pull/1658)) @ly015 +- Fix compatibility with `MultilevelPixelData` ([#1647](https://github.com/open-mmlab/mmpose/pull/1647)) @liqikai9 + +## **v1.0.0beta (1/09/2022)** + +We are excited to announce the release of MMPose 1.0.0beta. +MMPose 1.0.0beta is the first version of MMPose 1.x, a part of the OpenMMLab 2.0 projects. +Built upon the new [training engine](https://github.com/open-mmlab/mmengine). + +**Highlights** + +- **New engines**. MMPose 1.x is based on [MMEngine](https://github.com/open-mmlab/mmengine), which provides a general and powerful runner that allows more flexible customizations and significantly simplifies the entrypoints of high-level interfaces. + +- **Unified interfaces**. As a part of the OpenMMLab 2.0 projects, MMPose 1.x unifies and refactors the interfaces and internal logics of train, testing, datasets, models, evaluation, and visualization. All the OpenMMLab 2.0 projects share the same design in those interfaces and logics to allow the emergence of multi-task/modality algorithms. + +- **More documentation and tutorials**. We add a bunch of documentation and tutorials to help users get started more smoothly. Read it [here](https://mmpose.readthedocs.io/en/latest/). + +**Breaking Changes** + +In this release, we made lots of major refactoring and modifications. Please refer to the [migration guide](../migration.md) for details and migration instructions. + +## **v0.28.1 (28/07/2022)** + +This release is meant to fix the compatibility with the latest mmcv v1.6.1 + +## **v0.28.0 (06/07/2022)** + +**Highlights** + +- Support [TCFormer](https://openaccess.thecvf.com/content/CVPR2022/html/Zeng_Not_All_Tokens_Are_Equal_Human-Centric_Visual_Analysis_via_Token_CVPR_2022_paper.html) backbone, CVPR'2022 ([#1447](https://github.com/open-mmlab/mmpose/pull/1447), [#1452](https://github.com/open-mmlab/mmpose/pull/1452)) @zengwang430521 + +- Add [RLE](https://arxiv.org/abs/2107.11291) models on COCO dataset ([#1424](https://github.com/open-mmlab/mmpose/pull/1424)) @Indigo6, @Ben-Louis, @ly015 + +- Update swin models with better performance ([#1467](https://github.com/open-mmlab/mmpose/pull/1434)) @jin-s13 + +**New Features** + +- Support [TCFormer](https://openaccess.thecvf.com/content/CVPR2022/html/Zeng_Not_All_Tokens_Are_Equal_Human-Centric_Visual_Analysis_via_Token_CVPR_2022_paper.html) backbone, CVPR'2022 ([#1447](https://github.com/open-mmlab/mmpose/pull/1447), [#1452](https://github.com/open-mmlab/mmpose/pull/1452)) @zengwang430521 + +- Add [RLE](https://arxiv.org/abs/2107.11291) models on COCO dataset ([#1424](https://github.com/open-mmlab/mmpose/pull/1424)) @Indigo6, @Ben-Louis, @ly015 + +- Support layer decay optimizer constructor and learning rate decay optimizer constructor ([#1423](https://github.com/open-mmlab/mmpose/pull/1423)) @jin-s13 + +**Improvements** + +- Improve documentation quality ([#1416](https://github.com/open-mmlab/mmpose/pull/1416), [#1421](https://github.com/open-mmlab/mmpose/pull/1421), [#1423](https://github.com/open-mmlab/mmpose/pull/1423), [#1426](https://github.com/open-mmlab/mmpose/pull/1426), [#1458](https://github.com/open-mmlab/mmpose/pull/1458), [#1463](https://github.com/open-mmlab/mmpose/pull/1463)) @ly015, @liqikai9 + +- Support installation by [mim](https://github.com/open-mmlab/mim) ([#1425](https://github.com/open-mmlab/mmpose/pull/1425)) @liqikai9 + +- Support PAVI logger ([#1434](https://github.com/open-mmlab/mmpose/pull/1434)) @EvelynWang-0423 + +- Add progress bar for some demos ([#1454](https://github.com/open-mmlab/mmpose/pull/1454)) @liqikai9 + +- Webcam API supports quick device setting in terminal commands ([#1466](https://github.com/open-mmlab/mmpose/pull/1466)) @ly015 + +- Update swin models with better performance ([#1467](https://github.com/open-mmlab/mmpose/pull/1434)) @jin-s13 + +**Bug Fixes** + +- Rename `custom_hooks_config` to `custom_hooks` in configs to align with the documentation ([#1427](https://github.com/open-mmlab/mmpose/pull/1427)) @ly015 + +- Fix deadlock issue in Webcam API ([#1430](https://github.com/open-mmlab/mmpose/pull/1430)) @ly015 + +- Fix smoother configs in video 3D demo ([#1457](https://github.com/open-mmlab/mmpose/pull/1457)) @ly015 + +## **v0.27.0 (07/06/2022)** + +**Highlights** + +- Support hand gesture recognition + + - Try the demo for gesture recognition + - Learn more about the algorithm, dataset and experiment results + +- Major upgrade to the Webcam API + + - Tutorials (EN|zh_CN) + - [API Reference](https://mmpose.readthedocs.io/en/latest/api.html#mmpose-apis-webcam) + - Demo + +**New Features** + +- Support gesture recognition algorithm [MTUT](https://openaccess.thecvf.com/content_CVPR_2019/html/Abavisani_Improving_the_Performance_of_Unimodal_Dynamic_Hand-Gesture_Recognition_With_Multimodal_CVPR_2019_paper.html) CVPR'2019 and dataset [NVGesture](https://openaccess.thecvf.com/content_cvpr_2016/html/Molchanov_Online_Detection_and_CVPR_2016_paper.html) CVPR'2016 ([#1380](https://github.com/open-mmlab/mmpose/pull/1380)) @Ben-Louis + +**Improvements** + +- Upgrade Webcam API and related documents ([#1393](https://github.com/open-mmlab/mmpose/pull/1393), [#1404](https://github.com/open-mmlab/mmpose/pull/1404), [#1413](https://github.com/open-mmlab/mmpose/pull/1413)) @ly015 + +- Support exporting COCO inference result without the annotation file ([#1368](https://github.com/open-mmlab/mmpose/pull/1368)) @liqikai9 + +- Replace markdownlint with mdformat in CI to avoid the dependence on ruby [#1382](https://github.com/open-mmlab/mmpose/pull/1382) @ly015 + +- Improve documentation quality ([#1385](https://github.com/open-mmlab/mmpose/pull/1385), [#1394](https://github.com/open-mmlab/mmpose/pull/1394), [#1395](https://github.com/open-mmlab/mmpose/pull/1395), [#1408](https://github.com/open-mmlab/mmpose/pull/1408)) @chubei-oppen, @ly015, @liqikai9 + +**Bug Fixes** + +- Fix xywh->xyxy bbox conversion in dataset sanity check ([#1367](https://github.com/open-mmlab/mmpose/pull/1367)) @jin-s13 + +- Fix a bug in two-stage 3D keypoint demo ([#1373](https://github.com/open-mmlab/mmpose/pull/1373)) @ly015 + +- Fix out-dated settings in PVT configs ([#1376](https://github.com/open-mmlab/mmpose/pull/1376)) @ly015 + +- Fix myst settings for document compiling ([#1381](https://github.com/open-mmlab/mmpose/pull/1381)) @ly015 + +- Fix a bug in bbox transform ([#1384](https://github.com/open-mmlab/mmpose/pull/1384)) @ly015 + +- Fix inaccurate description of `min_keypoints` in tracking apis ([#1398](https://github.com/open-mmlab/mmpose/pull/1398)) @pallgeuer + +- Fix warning with `torch.meshgrid` ([#1402](https://github.com/open-mmlab/mmpose/pull/1402)) @pallgeuer + +- Remove redundant transformer modules from `mmpose.datasets.backbones.utils` ([#1405](https://github.com/open-mmlab/mmpose/pull/1405)) @ly015 + +## **v0.26.0 (05/05/2022)** + +**Highlights** + +- Support [RLE (Residual Log-likelihood Estimation)](https://arxiv.org/abs/2107.11291), ICCV'2021 ([#1259](https://github.com/open-mmlab/mmpose/pull/1259)) @Indigo6, @ly015 + +- Support [Swin Transformer](https://arxiv.org/abs/2103.14030), ICCV'2021 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +- Support [PVT](https://arxiv.org/abs/2102.12122), ICCV'2021 and [PVTv2](https://arxiv.org/abs/2106.13797), CVMJ'2022 ([#1343](https://github.com/open-mmlab/mmpose/pull/1343)) @zengwang430521 + +- Speed up inference and reduce CPU usage by optimizing the pre-processing pipeline ([#1320](https://github.com/open-mmlab/mmpose/pull/1320)) @chenxinfeng4, @liqikai9 + +**New Features** + +- Support [RLE (Residual Log-likelihood Estimation)](https://arxiv.org/abs/2107.11291), ICCV'2021 ([#1259](https://github.com/open-mmlab/mmpose/pull/1259)) @Indigo6, @ly015 + +- Support [Swin Transformer](https://arxiv.org/abs/2103.14030), ICCV'2021 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +- Support [PVT](https://arxiv.org/abs/2102.12122), ICCV'2021 and [PVTv2](https://arxiv.org/abs/2106.13797), CVMJ'2022 ([#1343](https://github.com/open-mmlab/mmpose/pull/1343)) @zengwang430521 + +- Support [FPN](https://openaccess.thecvf.com/content_cvpr_2017/html/Lin_Feature_Pyramid_Networks_CVPR_2017_paper.html), CVPR'2017 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +**Improvements** + +- Speed up inference and reduce CPU usage by optimizing the pre-processing pipeline ([#1320](https://github.com/open-mmlab/mmpose/pull/1320)) @chenxinfeng4, @liqikai9 + +- Video demo supports models that requires multi-frame inputs ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @liqikai9, @jin-s13 + +- Update benchmark regression list ([#1328](https://github.com/open-mmlab/mmpose/pull/1328)) @ly015, @liqikai9 + +- Remove unnecessary warnings in `TopDownPoseTrack18VideoDataset` ([#1335](https://github.com/open-mmlab/mmpose/pull/1335)) @liqikai9 + +- Improve documentation quality ([#1313](https://github.com/open-mmlab/mmpose/pull/1313), [#1305](https://github.com/open-mmlab/mmpose/pull/1305)) @Ben-Louis, @ly015 + +- Update deprecating settings in configs ([#1317](https://github.com/open-mmlab/mmpose/pull/1317)) @ly015 + +**Bug Fixes** + +- Fix a bug in human skeleton grouping that may skip the matching process unexpectedly when `ignore_to_much` is True ([#1341](https://github.com/open-mmlab/mmpose/pull/1341)) @daixinghome + +- Fix a GPG key error that leads to CI failure ([#1354](https://github.com/open-mmlab/mmpose/pull/1354)) @ly015 + +- Fix bugs in distributed training script ([#1338](https://github.com/open-mmlab/mmpose/pull/1338), [#1298](https://github.com/open-mmlab/mmpose/pull/1298)) @ly015 + +- Fix an upstream bug in xtoccotools that causes incorrect AP(M) results ([#1308](https://github.com/open-mmlab/mmpose/pull/1308)) @jin-s13, @ly015 + +- Fix indentiation errors in the colab tutorial ([#1298](https://github.com/open-mmlab/mmpose/pull/1298)) @YuanZi1501040205 + +- Fix incompatible model weight initialization with other OpenMMLab codebases ([#1329](https://github.com/open-mmlab/mmpose/pull/1329)) @274869388 + +- Fix HRNet FP16 checkpoints download URL ([#1309](https://github.com/open-mmlab/mmpose/pull/1309)) @YinAoXiong + +- Fix typos in `body3d_two_stage_video_demo.py` ([#1295](https://github.com/open-mmlab/mmpose/pull/1295)) @mucozcan + +**Breaking Changes** + +- Refactor bbox processing in datasets and pipelines ([#1311](https://github.com/open-mmlab/mmpose/pull/1311)) @ly015, @Ben-Louis + +- The bbox format conversion (xywh to center-scale) and random translation are moved from the dataset to the pipeline. The comparison between new and old version is as below: + +v0.26.0v0.25.0Dataset +(e.g. [TopDownCOCODataset](https://github.com/open-mmlab/mmpose/blob/master/mmpose/datasets/datasets/top_down/topdown_coco_dataset.py)) + +... # Data sample only contains bbox rec.append({ 'bbox': obj\['clean_bbox\]\[:4\], ... }) + + + +
+
+
+For [Animal-Pose](https://sites.google.com/view/animal-pose/) dataset, the images and annotations can be downloaded from [official website](https://sites.google.com/view/animal-pose/). The script `tools/dataset_converters/parse_animalpose_dataset.py` converts raw annotations into the format compatible with MMPose. The pre-processed [annotation files](https://download.openmmlab.com/mmpose/datasets/animalpose_annotations.tar) are available. If you would like to generate the annotations by yourself, please follow:
+
+1. Download the raw images and annotations and extract them under `$MMPOSE/data`. Make them look like this:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ │── animalpose
+ │
+ │-- VOC2012
+ │ │-- Annotations
+ │ │-- ImageSets
+ │ │-- JPEGImages
+ │ │-- SegmentationClass
+ │ │-- SegmentationObject
+ │
+ │-- animalpose_image_part2
+ │ │-- cat
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- PASCAL2011_animal_annotation
+ │ │-- cat
+ │ │ |-- 2007_000528_1.xml
+ │ │ |-- 2007_000549_1.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annimalpose_anno2
+ │ │-- cat
+ │ │ |-- ca1.xml
+ │ │ |-- ca2.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ ```
+
+2. Run command
+
+ ```bash
+ python tools/dataset_converters/parse_animalpose_dataset.py
+ ```
+
+ The generated annotation files are put in `$MMPOSE/data/animalpose/annotations`.
+
+The official dataset does not provide the official train/val/test set split.
+We choose the images from PascalVOC for train & val. In total, we have 3608 images and 5117 annotations for train+val, where
+2798 images with 4000 annotations are used for training, and 810 images with 1117 annotations are used for validation.
+Those images from other sources (1000 images with 1000 annotations) are used for testing.
+
+### COFW
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
+
+For COFW data, please download from [COFW Dataset (Color Images)](https://data.caltech.edu/records/20099).
+Move `COFW_train_color.mat` and `COFW_test_color.mat` to `$MMPOSE/data/cofw/` and make them look like:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+```
+
+Run `pip install h5py` first to install the dependency, then run the following script under `$MMPOSE`:
+
+```bash
+python tools/dataset_converters/parse_cofw_dataset.py
+```
+
+And you will get
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+ |── annotations
+ | |── cofw_train.json
+ | |── cofw_test.json
+ |── images
+ |── 000001.jpg
+ |── 000002.jpg
+```
+
+### DeepposeKit
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+
+
+For [Vinegar Fly](https://github.com/jgraving/DeepPoseKit-Data), [Desert Locust](https://github.com/jgraving/DeepPoseKit-Data), and [Grévy’s Zebra](https://github.com/jgraving/DeepPoseKit-Data) dataset, the annotations files can be downloaded from [DeepPoseKit-Data](https://github.com/jgraving/DeepPoseKit-Data). The script `tools/dataset_converters/parse_deepposekit_dataset.py` converts raw annotations into the format compatible with MMPose. The pre-processed annotation files are available at [vinegar_fly_annotations](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_annotations.tar), [locust_annotations](https://download.openmmlab.com/mmpose/datasets/locust_annotations.tar), and [zebra_annotations](https://download.openmmlab.com/mmpose/datasets/zebra_annotations.tar). If you would like to generate the annotations by yourself, please follows:
+
+1. Download the raw images and annotations and extract them under `$MMPOSE/data`. Make them look like this:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ |
+ |── DeepPoseKit-Data
+ | `── datasets
+ | |── fly
+ | | |── annotation_data_release.h5
+ | | |── skeleton.csv
+ | | |── ...
+ | |
+ | |── locust
+ | | |── annotation_data_release.h5
+ | | |── skeleton.csv
+ | | |── ...
+ | |
+ | `── zebra
+ | |── annotation_data_release.h5
+ | |── skeleton.csv
+ | |── ...
+ |
+ │── fly
+ `-- images
+ │-- 0.jpg
+ │-- 1.jpg
+ │-- ...
+ ```
+
+ Note that the images can be downloaded from [vinegar_fly_images](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_images.tar), [locust_images](https://download.openmmlab.com/mmpose/datasets/locust_images.tar), and [zebra_images](https://download.openmmlab.com/mmpose/datasets/zebra_images.tar).
+
+2. Run command
+
+ ```bash
+ python tools/dataset_converters/parse_deepposekit_dataset.py
+ ```
+
+ The generated annotation files are put in `$MMPOSE/data/fly/annotations`, `$MMPOSE/data/locust/annotations`, and `$MMPOSE/data/zebra/annotations`.
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation.
+
+### Macaque
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
+For [MacaquePose](http://www2.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html) dataset, images and annotations can be downloaded from [download](http://www2.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html). The script `tools/dataset_converters/parse_macaquepose_dataset.py` converts raw annotations into the format compatible with MMPose. The pre-processed [macaque_annotations](https://download.openmmlab.com/mmpose/datasets/macaque_annotations.tar) are available. If you would like to generate the annotations by yourself, please follows:
+
+1. Download the raw images and annotations and extract them under `$MMPOSE/data`. Make them look like this:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ │── macaque
+ │-- annotations.csv
+ │-- images
+ │ │-- 01418849d54b3005.jpg
+ │ │-- 0142d1d1a6904a70.jpg
+ │ │-- 01ef2c4c260321b7.jpg
+ │ │-- 020a1c75c8c85238.jpg
+ │ │-- 020b1506eef2557d.jpg
+ │ │-- ...
+ ```
+
+2. Run command
+
+ ```bash
+ python tools/dataset_converters/parse_macaquepose_dataset.py
+ ```
+
+ The generated annotation files are put in `$MMPOSE/data/macaque/annotations`.
+
+Since the official dataset does not provide the test set, we randomly select 12500 images for training, and the rest for evaluation.
+
+### Human3.6M
+
+MacaquePose (bioRxiv'2020)
+ +```bibtex +@article{labuguen2020macaquepose, + title={MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture}, + author={Labuguen, Rollyn and Matsumoto, Jumpei and Negrete, Salvador and Nishimaru, Hiroshi and Nishijo, Hisao and Takada, Masahiko and Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro}, + journal={bioRxiv}, + year={2020}, + publisher={Cold Spring Harbor Laboratory} +} +``` + +
+
+
+For [Human3.6M](http://vision.imar.ro/human3.6m/description.php), please download from the official website and place the files under `$MMPOSE/data/h36m`.
+Then run the [preprocessing script](/tools/dataset_converters/preprocess_h36m.py):
+
+```bash
+python tools/dataset_converters/preprocess_h36m.py --metadata {path to metadata.xml} --original data/h36m
+```
+
+This will extract camera parameters and pose annotations at full framerate (50 FPS) and downsampled framerate (10 FPS). The processed data should have the following structure:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── h36m
+ ├── annotation_body3d
+ | ├── cameras.pkl
+ | ├── fps50
+ | | ├── h36m_test.npz
+ | | ├── h36m_train.npz
+ | | ├── joint2d_rel_stats.pkl
+ | | ├── joint2d_stats.pkl
+ | | ├── joint3d_rel_stats.pkl
+ | | `── joint3d_stats.pkl
+ | `── fps10
+ | ├── h36m_test.npz
+ | ├── h36m_train.npz
+ | ├── joint2d_rel_stats.pkl
+ | ├── joint2d_stats.pkl
+ | ├── joint3d_rel_stats.pkl
+ | `── joint3d_stats.pkl
+ `── images
+ ├── S1
+ | ├── S1_Directions_1.54138969
+ | | ├── S1_Directions_1.54138969_00001.jpg
+ | | ├── S1_Directions_1.54138969_00002.jpg
+ | | ├── ...
+ | ├── ...
+ ├── S5
+ ├── S6
+ ├── S7
+ ├── S8
+ ├── S9
+ `── S11
+```
+
+After that, the annotations need to be transformed into COCO format which is compatible with MMPose. Please run:
+
+```bash
+python tools/dataset_converters/h36m_to_coco.py
+```
+
+### MPII
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+During training and inference for [MPII](http://human-pose.mpi-inf.mpg.de/), the prediction result will be saved as '.mat' format by default. We also provide a tool to convert this `.mat` to more readable `.json` format.
+
+```shell
+python tools/dataset_converters/mat2json ${PRED_MAT_FILE} ${GT_JSON_FILE} ${OUTPUT_PRED_JSON_FILE}
+```
+
+For example,
+
+```shell
+python tools/dataset/mat2json work_dirs/res50_mpii_256x256/pred.mat data/mpii/annotations/mpii_val.json pred.json
+```
+
+## Label Studio
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+For users of [Label Studio](https://github.com/heartexlabs/label-studio/), please follow the instructions in the [Label Studio to COCO document](./label_studio.md) to annotate and export the results as a Label Studio `.json` file. And save the `Code` from the `Labeling Interface` as an `.xml` file.
+
+We provide a script to convert Label Studio `.json` annotation file to COCO `.json` format file. It can be used by running the following command:
+
+```shell
+python tools/dataset_converters/labelstudio2coco.py ${LS_JSON_FILE} ${LS_XML_FILE} ${OUTPUT_COCO_JSON_FILE}
+```
+
+For example,
+
+```shell
+python tools/dataset_converters/labelstudio2coco.py config.xml project-1-at-2023-05-13-09-22-91b53efa.json output/result.json
+```
+
+### UBody2D
+
+Label Studio
+ +```bibtex +@misc{Label Studio, + title={{Label Studio}: Data labeling software}, + url={https://github.com/heartexlabs/label-studio}, + note={Open source software available from https://github.com/heartexlabs/label-studio}, + author={ + Maxim Tkachenko and + Mikhail Malyuk and + Andrey Holmanyuk and + Nikolai Liubimov}, + year={2020-2022}, +} +``` + +
+
+
+For [Ubody](https://github.com/IDEA-Research/OSX) dataset, videos and annotations can be downloaded from [OSX homepage](https://github.com/IDEA-Research/OSX).
+
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── UBody
+ ├── annotations
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+ ├── splits
+ │ ├── inter_scene_test_list.npy
+ │ └── intra_scene_test_list.npy
+ ├── videos
+ │ ├── ConductMusic
+ │ ├── Entertainment
+ │ ├── Fitness
+ │ ├── Interview
+ │ ├── LiveVlog
+ │ ├── Magic_show
+ │ ├── Movie
+ │ ├── Olympic
+ │ ├── Online_class
+ │ ├── SignLanguage
+ │ ├── Singing
+ │ ├── Speech
+ │ ├── TVShow
+ │ ├── TalkShow
+ │ └── VideoConference
+```
+
+We provide a script to convert vidoes to images and split annotations to train/val sets. It can be used by running the following command:
+
+```shell
+python tools/dataset_converters/ubody_kpts_to_coco.py --data-root ${UBODY_DATA_ROOT}
+```
+
+For example,
+
+```shell
+python tools/dataset_converters/ubody_kpts_to_coco.py --data-root data/UBody
+```
diff --git a/docs/en/user_guides/how_to_deploy.md b/docs/en/user_guides/how_to_deploy.md
new file mode 100644
index 0000000000000000000000000000000000000000..0b8e31a395995d1793400c3dc8dc7d067573db69
--- /dev/null
+++ b/docs/en/user_guides/how_to_deploy.md
@@ -0,0 +1,294 @@
+# Publish Model and Deployment
+
+This chapter will introduce how to export and deploy models trained with MMPose. It includes the following sections:
+
+- [Model Simplification](#model-simplification)
+- [Deployment with MMDeploy](#deployment-with-mmdeploy)
+ - [Introduction to MMDeploy](#introduction-to-mmdeploy)
+ - [Supported Models](#supported-models)
+ - [Installation](#installation)
+ - [Model Conversion](#model-conversion)
+ - [How to Find the Deployment Configuration File for an MMPose Model](#how-to-find-the-deployment-configuration-file-for-an-mmpose-model)
+ - [RTMPose Model Export Example](#rtmpose-model-export-example)
+ - [ONNX](#onnx)
+ - [TensorRT](#tensorrt)
+ - [Advanced Settings](#advanced-settings)
+ - [Model Profiling](#model-profiling)
+ - [Accuracy Validation](#accuracy-validation)
+
+## Publish Model
+
+By default, the checkpoint file saved during MMPose training contains all the information about the model, including the model structure, weights, optimizer states, etc. This information is redundant for model deployment. Therefore, we need to simplify the model. The simplified `.pth` file can even be less than half the size of the original.
+
+MMPose provides the [tools/misc/publish_model.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/misc/publish_model.py) script for model simplification, which can be used as follows:
+
+```shell
+python tools/misc/publish_model.py ${IN_FILE} ${OUT_FILE}
+```
+
+For example:
+
+```shell
+python tools/misc/publish_model.py ./epoch_10.pth ./epoch_10_publish.pth
+```
+
+The script will automatically simplify the model, save the simplified model to the specified path, and add a timestamp to the filename, for example, `./epoch_10_publish-21815b2c_20230726.pth`.
+
+## Deployment with MMDeploy
+
+### Introduction to MMDeploy
+
+MMDeploy is the OpenMMLab model deployment toolbox, providing a unified deployment experience for various algorithm libraries. With MMDeploy, developers can easily generate SDKs tailored to specific hardware from MMPose, saving a lot of adaptation time.
+
+- You can directly download SDK versions of models (ONNX, TensorRT, ncnn, etc.) from the [ OpenMMLab Deploee](https://platform.openmmlab.com/deploee).
+- We also support [Online Model Conversion](https://platform.openmmlab.com/deploee/task-convert-list), so you don't need to install MMDeploy locally.
+
+For more information and usage guidelines, see the [MMDeploy documentation](https://mmdeploy.readthedocs.io/en/latest/get_started.html).
+
+### Supported Models
+
+| Model | Task | ONNX Runtime | TensorRT | ncnn | PPLNN | OpenVINO | CoreML | TorchScript |
+| :-------------------------------------------------------------------------------------------------------- | :------------ | :----------: | :------: | :--: | :---: | :------: | :----: | :---------: |
+| [HRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hrnet-cvpr-2019) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [MSPN](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#mspn-arxiv-2019) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [LiteHRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#litehrnet-cvpr-2021) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [Hourglass](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#hourglass-eccv-2016) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [SimCC](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#simcc-eccv-2022) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [RTMPose](https://github.com/open-mmlab/mmpose/tree/main/projects/rtmpose) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [YoloX-Pose](https://github.com/open-mmlab/mmpose/tree/main/projects/yolox_pose) | PoseDetection | Y | Y | N | N | Y | Y | Y |
+
+### Installation
+
+Before starting the deployment, you need to make sure that MMPose, MMDetection, and MMDeploy are correctly installed. Please follow the installation instructions below:
+
+- [Installation of MMPose and MMDetection](../installation.md)
+- [Installation of MMDeploy](https://mmdeploy.readthedocs.io/en/latest/04-supported-codebases/mmpose.html)
+
+Depending on the backend you choose for deployment, some backends require **compilation of custom operators** supported by MMDeploy. Please refer to the corresponding documentation to ensure that the environment is set up correctly:
+
+- [ONNX](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/onnxruntime.html)
+- [TensorRT](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/tensorrt.html)
+- [OpenVINO](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/openvino.html)
+- [ncnn](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/ncnn.html)
+- [TorchScript](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/torchscript.html)
+- [More](https://github.com/open-mmlab/mmdeploy/tree/main/docs/en/05-supported-backends)
+
+### Model Conversion
+
+After completing the installation, you can start model deployment. You can use the provided [tools/deploy.py](https://github.com/open-mmlab/mmdeploy/blob/main/tools/deploy.py) script in MMDeploy to easily convert MMPose models to different deployment backends.
+
+Here's how you can use it:
+
+```shell
+python ./tools/deploy.py \
+ ${DEPLOY_CFG_PATH} \
+ ${MODEL_CFG_PATH} \
+ ${MODEL_CHECKPOINT_PATH} \
+ ${INPUT_IMG} \
+ --test-img ${TEST_IMG} \
+ --work-dir ${WORK_DIR} \
+ --calib-dataset-cfg ${CALIB_DATA_CFG} \
+ --device ${DEVICE} \
+ --log-level INFO \
+ --show \
+ --dump-info
+```
+
+Parameter descriptions:
+
+- `deploy_cfg`: Deployment configuration specific to mmdeploy, including inference framework type, quantization, and whether the input shape is dynamic or static. The configuration files may have reference relationships, and `configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py` is an example.
+
+- `model_cfg`: Model configuration specific to the mm algorithm library, e.g., `mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py`, independent of mmdeploy path.
+
+- `checkpoint`: Path to the torch model. It can be a local file path or a download link (e.g., `http/https`).
+
+- `img`: Path to the test image or point cloud file used for model conversion.
+
+- `--test-img`: Path to the image file used to test the model. Default is set to `None`.
+
+- `--work-dir`: Working directory to save logs and model files.
+
+- `--calib-dataset-cfg`: This parameter only takes effect in `int8` mode and is used for the calibration dataset configuration file. If not provided in `int8` mode, the script will automatically use the 'val' dataset from the model configuration file for calibration.
+
+- `--device`: Device used for model conversion. Default is `cpu`, but for trt, you can use `cuda:0`, for example.
+
+- `--log-level`: Set the log level, with options including 'CRITICAL', 'FATAL', 'ERROR', 'WARN', 'WARNING', 'INFO', 'DEBUG', and 'NOTSET'. Default is `INFO`.
+
+- `--show`: Whether to display the detection results.
+
+- `--dump-info`: Whether to output SDK information.
+
+#### How to Find the Deployment Configuration File for an MMPose Model
+
+1. All deployment configuration files related to MMPose are stored in the [configs/mmpose/](https://github.com/open-mmlab/mmdeploy/tree/main/configs/mmpose) directory.
+2. The naming convention for deployment configuration files is `{Task}_{Algorithm}_{Backend}_{Dynamic/Static}_{Input Size}`.
+
+#### RTMPose Model Export Example
+
+In this section, we demonstrate how to export the RTMPose model in ONNX and TensorRT formats. For more information, refer to the [MMDeploy documentation](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/convert_model.html).
+
+- ONNX Configuration
+
+ - [pose-detection_simcc_onnxruntime_dynamic.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py)
+
+- TensorRT Configuration
+
+ - [pose-detection_simcc_tensorrt_dynamic-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py)
+
+- More
+
+ | Backend | Config |
+ | :-------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+ | ncnn-fp16 | [pose-detection_simcc_ncnn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_ncnn-fp16_static-256x192.py) |
+ | CoreML | [pose-detection_simcc_coreml_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_coreml_static-256x192.py) |
+ | OpenVINO | [pose-detection_simcc_openvino_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_openvino_static-256x192.py) |
+ | RKNN | [pose-detection_simcc_rknn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_rknn-fp16_static-256x192.py) |
+
+If you need to modify the deployment configuration, please refer to the [MMDeploy config tutorial](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/write_config.html).
+
+The file structure used in this tutorial is as follows:
+
+```shell
+|----mmdeploy
+|----mmpose
+```
+
+##### ONNX
+
+Run the following command:
+
+```shell
+# Go to the mmdeploy directory
+cd ${PATH_TO_MMDEPLOY}
+
+# Convert RTMPose
+# The input model path can be a local path or a download link.
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # Export SDK info
+```
+
+The default exported model file is `{work-dir}/end2end.onnx`
+
+##### TensorRT
+
+Run the following command:
+
+```shell
+# Go to the mmdeploy directory
+cd ${PATH_TO_MMDEPLOY}
+
+# Convert RTMPose
+# The input model path can be a local path or a download link.
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmpose-m \
+ --device cuda:0 \
+ --show \
+ --dump-info # Export SDK info
+```
+
+The default exported model file is `{work-dir}/end2end.engine`
+
+If the model is successfully exported, you will see the detection results on the sample image:
+
+
+
+###### Advanced Settings
+
+If you want to use TensorRT-FP16, you can enable it by modifying the following MMDeploy configuration:
+
+```Python
+# in MMDeploy config
+backend_config = dict(
+ type='tensorrt',
+ common_config=dict(
+ fp16_mode=True # Enable FP16
+ ))
+```
+
+### Model Profiling
+
+If you want to test the inference speed of the model in the deployment framework, MMDeploy provides a convenient script called `tools/profiler.py`.
+
+You need to prepare a folder containing test images named `./test_images`, and the profiler will randomly extract images from this directory for model profiling.
+
+```shell
+# Go to the mmdeploy directory
+cd ${PATH_TO_MMDEPLOY}
+
+python tools/profiler.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ ../test_images \
+ --model {WORK_DIR}/end2end.onnx \
+ --shape 256x192 \
+ --device cpu \
+ --warmup 50 \
+ --num-iter 200
+```
+
+The profiling results will be displayed as follows:
+
+```shell
+01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS
+01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS
+01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS
+01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS
+01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS
+01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS
+----- Settings:
++------------+---------+
+| batch size | 1 |
+| shape | 256x192 |
+| iterations | 200 |
+| warmup | 50 |
++------------+---------+
+----- Results:
++--------+------------+---------+
+| Stats | Latency/ms | FPS |
++--------+------------+---------+
+| Mean | 11.060 | 90.412 |
+| Median | 11.852 | 84.375 |
+| Min | 7.812 | 128.007 |
+| Max | 13.690 | 73.044 |
++--------+------------+---------+
+```
+
+```{note}
+If you want to learn more about profiler and its more parameter settings and functionality, you can refer to the [Profiler documentation](https://mmdeploy.readthedocs.io/en/main/02-how-to-run/useful_tools.html#profiler).
+```
+
+### Model Accuracy Testing
+
+If you want to test the inference accuracy of the model in the deployment framework, MMDeploy provides a convenient script called `tools/test.py`.
+
+```shell
+# Go to the mmdeploy directory
+cd ${PATH_TO_MMDEPLOY}
+
+python tools/test.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ./mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ --model {PATH_TO_MODEL}/rtmpose_m.pth \
+ --device cpu
+```
+
+```{note}
+For more detailed content, please refer to the [MMDeploy documentation](https://github.com/open-mmlab/mmdeploy/blob/main/docs/en/02-how-to-run/profile_model.md).
+```
+
+With this, you have covered the steps for model simplification and deployment using MMDeploy for MMPose models. It includes converting models to different formats (ONNX, TensorRT, etc.), testing inference speed, and accuracy in the deployment framework.
diff --git a/docs/en/user_guides/inference.md b/docs/en/user_guides/inference.md
new file mode 100644
index 0000000000000000000000000000000000000000..2081f39c75c823f68e7081f94935b9acd3c33599
--- /dev/null
+++ b/docs/en/user_guides/inference.md
@@ -0,0 +1,470 @@
+# Inference with existing models
+
+MMPose provides a wide variety of pre-trained models for pose estimation, which can be found in the [Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo.html).
+This guide will demonstrate **how to perform inference**, or running pose estimation on provided images or videos using trained models.
+
+For instructions on testing existing models on standard datasets, refer to this [guide](./train_and_test.md#test).
+
+In MMPose, we provide two ways to perform inference:
+
+1. Inferencer: a Unified Inference Interface
+2. Python API: more flexible and customizable
+
+## Inferencer: a Unified Inference Interface
+
+MMPose offers a comprehensive API for inference, known as [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24). This API enables users to perform inference on both images and videos using all the models supported by MMPose. Furthermore, the API provides automatic visualization of inference results and allows for the convenient saving of predictions.
+
+### Basic Usage
+
+The [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) can be used in any Python program to perform pose estimation. Below is an example of inference on a given image using the pre-trained human pose estimator within the Python shell.
+
+```python
+from mmpose.apis import MMPoseInferencer
+
+img_path = 'tests/data/coco/000000000785.jpg' # replace this with your own image path
+
+# instantiate the inferencer using the model alias
+inferencer = MMPoseInferencer('human')
+
+# The MMPoseInferencer API employs a lazy inference approach,
+# creating a prediction generator when given input
+result_generator = inferencer(img_path, show=True)
+result = next(result_generator)
+```
+
+If everything works fine, you will see the following image in a new window:
+
+
+The `result` variable is a dictionary comprising two keys, `'visualization'` and `'predictions'`.
+
+- `'visualization'` holds a list which:
+
+ - contains visualization results, such as the input image, markers of the estimated poses, and optional predicted heatmaps.
+ - remains empty if the `return_vis` argument is not specified.
+
+- `'predictions'` stores:
+
+ - a list of estimated keypoints for each identified instance.
+
+The structure of the `result` dictionary is as follows:
+
+```python
+result = {
+ 'visualization': [
+ # number of elements: batch_size (defaults to 1)
+ vis_image_1,
+ ...
+ ],
+ 'predictions': [
+ # pose estimation result of each image
+ # number of elements: batch_size (defaults to 1)
+ [
+ # pose information of each detected instance
+ # number of elements: number of detected instances
+ {'keypoints': ..., # instance 1
+ 'keypoint_scores': ...,
+ ...
+ },
+ {'keypoints': ..., # instance 2
+ 'keypoint_scores': ...,
+ ...
+ },
+ ]
+ ...
+ ]
+}
+
+```
+
+A **command-line interface (CLI)** tool for the inferencer is also available: `demo/inferencer_demo.py`. This tool allows users to perform inference using the same model and inputs with the following command:
+
+```bash
+python demo/inferencer_demo.py 'tests/data/coco/000000000785.jpg' \
+ --pose2d 'human' --show --pred-out-dir 'predictions'
+```
+
+The predictions will be save in `predictions/000000000785.json`. The argument names correspond with the [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24), which serves as an API.
+
+The inferencer is capable of processing a range of input types, which includes the following:
+
+- A path to an image
+- A path to a video
+- A path to a folder (which will cause all images in that folder to be inferred)
+- An image array (NA for CLI tool)
+- A list of image arrays (NA for CLI tool)
+- A webcam (in which case the `input` parameter should be set to either `'webcam'` or `'webcam:{CAMERA_ID}'`)
+
+Please note that when the input corresponds to multiple images, such as when the input is a video or a folder path, the inference process needs to iterate over the results generator in order to perform inference on all the frames or images within the folder. Here's an example in Python:
+
+```python
+folder_path = 'tests/data/coco'
+
+result_generator = inferencer(folder_path, show=True)
+results = [result for result in result_generator]
+```
+
+In this example, the `inferencer` takes the `folder_path` as input and returns a generator object (`result_generator`) that produces inference results. By iterating over the `result_generator` and storing each result in the `results` list, you can obtain the inference results for all the frames or images within the folder.
+
+### Custom Pose Estimation Models
+
+The inferencer provides several methods that can be used to customize the models employed:
+
+```python
+
+# build the inferencer with model alias
+inferencer = MMPoseInferencer('human')
+
+# build the inferencer with model config name
+inferencer = MMPoseInferencer('td-hm_hrnet-w32_8xb64-210e_coco-256x192')
+
+# build the inferencer with model config path and checkpoint path/URL
+inferencer = MMPoseInferencer(
+ pose2d='configs/body_2d_keypoint/topdown_heatmap/coco/' \
+ 'td-hm_hrnet-w32_8xb64-210e_coco-256x192.py',
+ pose2d_weights='https://download.openmmlab.com/mmpose/top_down/' \
+ 'hrnet/hrnet_w32_coco_256x192-c78dce93_20200708.pth'
+)
+```
+
+The complere list of model alias can be found in the [Model Alias](#model-alias) section.
+
+**Custom Inferencer for 3D Pose Estimation Models**
+
+The code shown above provides examples for creating 2D pose estimator inferencers. You can similarly construct a 3D model inferencer by using the `pose3d` argument:
+
+```python
+# build the inferencer with 3d model alias
+inferencer = MMPoseInferencer(pose3d="human3d")
+
+# build the inferencer with 3d model config name
+inferencer = MMPoseInferencer(pose3d="motionbert_dstformer-ft-243frm_8xb32-120e_h36m")
+
+# build the inferencer with 3d model config path and checkpoint path/URL
+inferencer = MMPoseInferencer(
+ pose3d='configs/body_3d_keypoint/motionbert/h36m/' \
+ 'motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py',
+ pose3d_weights='https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/' \
+ 'pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth'
+)
+```
+
+**Custom Object Detector for Top-down Pose Estimation Models**
+
+In addition, top-down pose estimators also require an object detection model. The inferencer is capable of inferring the instance type for models trained with datasets supported in MMPose, and subsequently constructing the necessary object detection model. Alternatively, users may also manually specify the detection model using the following methods:
+
+```python
+
+# specify detection model by alias
+# the available aliases include 'human', 'hand', 'face', 'animal',
+# as well as any additional aliases defined in mmdet
+inferencer = MMPoseInferencer(
+ # suppose the pose estimator is trained on custom dataset
+ pose2d='custom_human_pose_estimator.py',
+ pose2d_weights='custom_human_pose_estimator.pth',
+ det_model='human'
+)
+
+# specify detection model with model config name
+inferencer = MMPoseInferencer(
+ pose2d='human',
+ det_model='yolox_l_8x8_300e_coco',
+ det_cat_ids=[0], # the category id of 'human' class
+)
+
+# specify detection model with config path and checkpoint path/URL
+inferencer = MMPoseInferencer(
+ pose2d='human',
+ det_model=f'{PATH_TO_MMDET}/configs/yolox/yolox_l_8x8_300e_coco.py',
+ det_weights='https://download.openmmlab.com/mmdetection/v2.0/' \
+ 'yolox/yolox_l_8x8_300e_coco/' \
+ 'yolox_l_8x8_300e_coco_20211126_140236-d3bd2b23.pth',
+ det_cat_ids=[0], # the category id of 'human' class
+)
+```
+
+To perform top-down pose estimation on cropped images containing a single object, users can set `det_model='whole_image'`. This bypasses the object detector initialization, creating a bounding box that matches the input image size and directly sending the entire image to the top-down pose estimator.
+
+### Dump Results
+
+After performing pose estimation, you might want to save the results for further analysis or processing. This section will guide you through saving the predicted keypoints and visualizations to your local machine.
+
+To save the predictions in a JSON file, use the `pred_out_dir` argument when running the inferencer:
+
+```python
+result_generator = inferencer(img_path, pred_out_dir='predictions')
+result = next(result_generator)
+```
+
+The predictions will be saved in the `predictions/` folder in JSON format, with each file named after the corresponding input image or video.
+
+For more advanced scenarios, you can also access the predictions directly from the `result` dictionary returned by the inferencer. The key `'predictions'` contains a list of predicted keypoints for each individual instance in the input image or video. You can then manipulate or store these results using your preferred method.
+
+Keep in mind that if you want to save both the visualization images and the prediction files in a single folder, you can use the `out_dir` argument:
+
+```python
+result_generator = inferencer(img_path, out_dir='output')
+result = next(result_generator)
+```
+
+In this case, the visualization images will be saved in the `output/visualization/` folder, while the predictions will be stored in the `output/predictions/` folder.
+
+### Visualization
+
+The inferencer can automatically draw predictions on input images or videos. Visualization results can be displayed in a new window and saved locally.
+
+To view the visualization results in a new window, use the following code:
+
+```python
+result_generator = inferencer(img_path, show=True)
+result = next(result_generator)
+```
+
+Notice that:
+
+- If the input video comes from a webcam, displaying the visualization results in a new window will be enabled by default, allowing users to see the inputs.
+- If there is no GUI on the platform, this step may become stuck.
+
+To save the visualization results locally, specify the `vis_out_dir` argument like this:
+
+```python
+result_generator = inferencer(img_path, vis_out_dir='vis_results')
+result = next(result_generator)
+```
+
+The input images or videos with predicted poses will be saved in the `vis_results/` folder.
+
+As seen in the above image, the visualization of estimated poses consists of keypoints (depicted by solid circles) and skeletons (represented by lines). The default size of these visual elements might not produce satisfactory results. Users can adjust the circle size and line thickness using the `radius` and `thickness` arguments, as shown below:
+
+```python
+result_generator = inferencer(img_path, show=True, radius=4, thickness=2)
+result = next(result_generator)
+```
+
+### Arguments of Inferencer
+
+The [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) offers a variety of arguments for customizing pose estimation, visualization, and saving predictions. Below is a list of the arguments available when initializing the inferencer and their descriptions:
+
+| Argument | Description |
+| ---------------- | ---------------------------------------------------------------------------------------------------------------- |
+| `pose2d` | Specifies the model alias, configuration file name, or configuration file path for the 2D pose estimation model. |
+| `pose2d_weights` | Specifies the URL or local path to the 2D pose estimation model's checkpoint file. |
+| `pose3d` | Specifies the model alias, configuration file name, or configuration file path for the 3D pose estimation model. |
+| `pose3d_weights` | Specifies the URL or local path to the 3D pose estimation model's checkpoint file. |
+| `det_model` | Specifies the model alias, configuration file name, or configuration file path for the object detection model. |
+| `det_weights` | Specifies the URL or local path to the object detection model's checkpoint file. |
+| `det_cat_ids` | Specifies the list of category IDs corresponding to the object classes to be detected. |
+| `device` | The device to perform the inference. If left `None`, the Inferencer will select the most suitable one. |
+| `scope` | The namespace where the model modules are defined. |
+
+The inferencer is designed for both visualization and saving predictions. The table below presents the list of arguments available when using the [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) for inference, along with their compatibility with 2D and 3D inferencing:
+
+| Argument | Description | 2D | 3D |
+| ------------------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------- | --- | --- |
+| `show` | Controls the display of the image or video in a pop-up window. | ✔️ | ✔️ |
+| `radius` | Sets the visualization keypoint radius. | ✔️ | ✔️ |
+| `thickness` | Determines the link thickness for visualization. | ✔️ | ✔️ |
+| `kpt_thr` | Sets the keypoint score threshold. Keypoints with scores exceeding this threshold will be displayed. | ✔️ | ✔️ |
+| `draw_bbox` | Decides whether to display the bounding boxes of instances. | ✔️ | ✔️ |
+| `draw_heatmap` | Decides if the predicted heatmaps should be drawn. | ✔️ | ❌ |
+| `black_background` | Decides whether the estimated poses should be displayed on a black background. | ✔️ | ❌ |
+| `skeleton_style` | Sets the skeleton style. Options include 'mmpose' (default) and 'openpose'. | ✔️ | ❌ |
+| `use_oks_tracking` | Decides whether to use OKS as a similarity measure in tracking. | ❌ | ✔️ |
+| `tracking_thr` | Sets the similarity threshold for tracking. | ❌ | ✔️ |
+| `disable_norm_pose_2d` | Decides whether to scale the bounding box to the dataset's average bounding box scale and relocate the bounding box to the dataset's average bounding box center. | ❌ | ✔️ |
+| `disable_rebase_keypoint` | Decides whether to set the lowest keypoint with height 0. | ❌ | ✔️ |
+| `num_instances` | Sets the number of instances to visualize in the results. If set to a negative number, all detected instances will be visualized. | ❌ | ✔️ |
+| `return_vis` | Decides whether to include visualization images in the results. | ✔️ | ✔️ |
+| `vis_out_dir` | Defines the folder path to save the visualization images. If unset, the visualization images will not be saved. | ✔️ | ✔️ |
+| `return_datasamples` | Determines if the prediction should be returned in the `PoseDataSample` format. | ✔️ | ✔️ |
+| `pred_out_dir` | Specifies the folder path to save the predictions. If unset, the predictions will not be saved. | ✔️ | ✔️ |
+| `out_dir` | If `vis_out_dir` or `pred_out_dir` is unset, these will be set to `f'{out_dir}/visualization'` or `f'{out_dir}/predictions'`, respectively. | ✔️ | ✔️ |
+
+### Model Alias
+
+The MMPose library has predefined aliases for several frequently used models. These aliases can be utilized as a shortcut when initializing the [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24), as an alternative to providing the full model configuration name. Here are the available 2D model aliases and their corresponding configuration names:
+
+| Alias | Configuration Name | Task | Pose Estimator | Detector |
+| --------- | -------------------------------------------------- | ------------------------------- | -------------- | ------------------- |
+| animal | rtmpose-m_8xb64-210e_ap10k-256x256 | Animal pose estimation | RTMPose-m | RTMDet-m |
+| human | rtmpose-m_8xb256-420e_body8-256x192 | Human pose estimation | RTMPose-m | RTMDet-m |
+| body26 | rtmpose-m_8xb512-700e_body8-halpe26-256x192 | Human pose estimation | RTMPose-m | RTMDet-m |
+| face | rtmpose-m_8xb256-120e_face6-256x256 | Face keypoint detection | RTMPose-m | yolox-s |
+| hand | rtmpose-m_8xb256-210e_hand5-256x256 | Hand keypoint detection | RTMPose-m | ssdlite_mobilenetv2 |
+| wholebody | rtmpose-m_8xb64-270e_coco-wholebody-256x192 | Human wholebody pose estimation | RTMPose-m | RTMDet-m |
+| vitpose | td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192 | Human pose estimation | ViTPose-base | RTMDet-m |
+| vitpose-s | td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192 | Human pose estimation | ViTPose-small | RTMDet-m |
+| vitpose-b | td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192 | Human pose estimation | ViTPose-base | RTMDet-m |
+| vitpose-l | td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192 | Human pose estimation | ViTPose-large | RTMDet-m |
+| vitpose-h | td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192 | Human pose estimation | ViTPose-huge | RTMDet-m |
+
+The following table lists the available 3D model aliases and their corresponding configuration names:
+
+| Alias | Configuration Name | Task | 3D Pose Estimator | 2D Pose Estimator | Detector |
+| ------- | -------------------------------------------- | ------------------------ | ----------------- | ----------------- | ----------- |
+| human3d | vid_pl_motionbert_8xb32-120e_h36m | Human 3D pose estimation | MotionBert | RTMPose-m | RTMDet-m |
+| hand3d | internet_res50_4xb16-20e_interhand3d-256x256 | Hand 3D pose estimation | InterNet | - | whole image |
+
+In addition, users can utilize the CLI tool to display all available aliases with the following command:
+
+```shell
+python demo/inferencer_demo.py --show-alias
+```
+
+## Python API: more flexible and customizable
+
+MMPose provides a separate Python API for inference, which is more flexible but requires users to handle inputs and outputs themselves. Therefore, this API is suitable for users who are **familiar with MMPose**.
+
+The Python inference interface provided by MMPose is located in [$MMPOSE/mmpose/apis](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/apis) directory. Here is an example of building a topdown model and performing inference:
+
+### Build a model
+
+```python
+from mmcv.image import imread
+
+from mmpose.apis import inference_topdown, init_model
+from mmpose.registry import VISUALIZERS
+from mmpose.structures import merge_data_samples
+
+model_cfg = 'configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py'
+
+ckpt = 'https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth'
+
+device = 'cuda'
+
+# init model
+model = init_model(model_cfg, ckpt, device=device)
+```
+
+### Inference
+
+```python
+img_path = 'tests/data/coco/000000000785.jpg'
+
+# inference on a single image
+batch_results = inference_topdown(model, img_path)
+```
+
+The inference interface returns a list of PoseDataSample, each of which corresponds to the inference result of an image. The structure of PoseDataSample is as follows:
+
+```python
+[
+ UBody (CVPR'2023)
+ +```bibtex +@article{lin2023one, + title={One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer}, + author={Lin, Jing and Zeng, Ailing and Wang, Haoqian and Zhang, Lei and Li, Yu}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + year={2023}, +} +``` + +
+ +Some keypoints, such as "left hand", are defined in both datasets, but they have different indices. Specifically, the index for the "left hand" keypoint is 9 in the COCO dataset and 5 in the AIC dataset. Furthermore, each dataset contains unique keypoints that are not present in the counterpart dataset. For instance, the facial keypoints (with indices 0~4) are only defined in the COCO dataset, whereas the "head top" (with index 12) and "neck" (with index 13) keypoints are exclusive to the AIC dataset. The relationship between the keypoints in both datasets is illustrated in the following Venn diagram. + +

+ +Next, we will discuss two methods of mixing datasets. + +- [Merge](#merge-aic-into-coco) +- [Combine](#combine-aic-and-coco) + +### Merge AIC into COCO + +If users aim to enhance their model's performance on the COCO dataset or other similar datasets, they can use the AIC dataset as an auxiliary source. To do so, they should select only the keypoints in AIC dataset that are shared with COCO datasets and ignore the rest. Moreover, the indices of these chosen keypoints in the AIC dataset should be transformed to match the corresponding indices in the COCO dataset. + +

+ +In this scenario, no data conversion is required for the elements from the COCO dataset. To configure the COCO dataset, use the following code: + +```python +dataset_coco = dict( + type='CocoDataset', + data_root='data/coco/', + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=[], # Leave the `pipeline` empty, as no conversion is needed +) +``` + +For AIC dataset, the order of the keypoints needs to be transformed. MMPose provides a [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) transform to achieve this. Here's an example of how to configure the AIC sub dataset: + +```python +dataset_aic = dict( + type='AicDataset', + data_root='data/aic/', + ann_file='annotations/aic_train.json', + data_prefix=dict(img='ai_challenger_keypoint_train_20170902/' + 'keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, # same as COCO dataset + mapping=[ # includes index pairs for corresponding keypoints + (0, 6), # index 0 (in AIC) -> index 6 (in COCO) + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) +``` + +By using the [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11), the indices of keypoints with indices 0 to 11 will be transformed to corresponding indices among 5 to 16. Meanwhile, the keypoints with indices 12 and 13 will be removed. For the target keypoints with indices 0 to 4, which are not defined in the `mapping` argument, they will be set as invisible and won't be used in training. + +Once the sub datasets are configured, the [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) wrapper can be defined as follows: + +```python +dataset = dict( + type='CombinedDataset', + # Since the combined dataset has the same data format as COCO, + # it should use the same meta information for the dataset + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + # The pipeline includes typical transforms, such as loading the + # image and data augmentation + pipeline=train_pipeline, + # The sample_ratio_factor controls the sampling ratio of + # each dataset in the combined dataset. The length of sample_ratio_factor + # should match the number of datasets. Each factor indicates the sampling + # ratio of the corresponding dataset relative to its original length. + sample_ratio_factor=[1.0, 0.5] +) +``` + +A complete, ready-to-use [config file](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py) that merges the AIC dataset into the COCO dataset is also available. Users can refer to it for more details and use it as a template to build their own custom dataset. + +### Combine AIC and COCO + +The previously mentioned method discards some annotations in the AIC dataset. If users want to use all the information from both datasets, they can combine the two datasets. This means taking the union set of keypoints in both datasets. + +

+ +In this scenario, both COCO and AIC datasets need to adjust the keypoint indices using [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11): + +```python +dataset_coco = dict( + type='CocoDataset', + data_root='data/coco/', + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=19, # the size of union keypoint set + mapping=[ + (0, 0), + (1, 1), + # omitted + (16, 16), + ]) + ]) + +dataset_aic = dict( + type='AicDataset', + data_root='data/aic/', + ann_file='annotations/aic_train.json', + data_prefix=dict(img='ai_challenger_keypoint_train_20170902/' + 'keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=19, # the size of union keypoint set + mapping=[ + (0, 6), + # omitted + (12, 17), + (13, 18), + ]) + ], +) +``` + +To account for the fact that the combined dataset has 19 keypoints, which is different from either COCO or AIC dataset, a new dataset meta information file is needed to describe the new dataset. An example of such a file is [coco_aic.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/_base_/datasets/coco_aic.py), which is based on [coco.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/_base_/datasets/coco.py) but includes several updates: + +- The paper information of AIC dataset has been added. +- The 'head_top' and 'neck' keypoints, which are unique in AIC, have been added to the `keypoint_info`. +- A skeleton link between 'head_top' and 'neck' has been added. +- The `joint_weights` and `sigmas` have been extended for the newly added keypoints. + +Finally, the combined dataset can be configured as: + +```python +dataset = dict( + type='CombinedDataset', + # using new dataset meta information file + metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'), + datasets=[dataset_coco, dataset_aic], + # The pipeline includes typical transforms, such as loading the + # image and data augmentation + pipeline=train_pipeline, +) +``` + +Additionally, the output channel number of the model should be adjusted as the number of keypoints changes. If the users aim to evaluate the model on the COCO dataset, a subset of model outputs must be chosen. This subset can be customized using the `output_keypoint_indices` argument in `test_cfg`. Users can refer to the [config file](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py), which combines the COCO and AIC dataset, for more details and use it as a template to create their custom dataset. + +## Sampling Strategy for Mixed Datasets + +When training with mixed datasets, users often encounter the problem of inconsistent data distributions between different datasets. To address this issue, we provide two different sampling strategies: + +1. Adjust the sampling ratio of each sub dataset +2. Adjust the ratio of each sub dataset in each batch + +### Adjust the sampling ratio of each sub dataset + +In [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15), we provide the `sample_ratio_factor` argument to adjust the sampling ratio of each sub dataset. + +For example: + +- If `sample_ratio_factor` is `[1.0, 0.5]`, then all data from the first sub dataset will be included in the training, and the second sub dataset will be sampled at a ratio of 0.5. +- If `sample_ratio_factor` is `[1.0, 2.0]`, then all data from the first sub dataset will be included in the training, and the second sub dataset will be sampled at a ratio of 2 times its total number. + +### Adjust the ratio of each sub dataset in each batch + +In [$MMPOSE/datasets/samplers.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/samplers.py) we provide [MultiSourceSampler](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/samplers.py#L15) to adjust the ratio of each sub dataset in each batch. + +For example: + +- If `sample_ratio_factor` is `[1.0, 0.5]`, then the data volume of the first sub dataset in each batch will be `1.0 / (1.0 + 0.5) = 66.7%`, and the data volume of the second sub dataset will be `0.5 / (1.0 + 0.5) = 33.3%`. That is, the first sub dataset will be twice as large as the second sub dataset in each batch. + +Users can set the `sampler` argument in the configuration file: + +```python +# data loaders +train_bs = 256 +train_dataloader = dict( + batch_size=train_bs, + num_workers=4, + persistent_workers=True, + sampler=dict( + type='MultiSourceSampler', + batch_size=train_bs, + # ratio of sub datasets in each batch + source_ratio=[1.0, 0.5], + shuffle=True, + round_up=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + # set sub datasets + datasets=[sub_dataset1, sub_dataset2], + pipeline=train_pipeline, + test_mode=False, + )) +``` diff --git a/docs/en/user_guides/model_analysis.md b/docs/en/user_guides/model_analysis.md new file mode 100644 index 0000000000000000000000000000000000000000..2050c01a1af7c8df5a02fb6e23c5a507d1aee86c --- /dev/null +++ b/docs/en/user_guides/model_analysis.md @@ -0,0 +1,102 @@ +# Model Analysis + +## Get Model Params & FLOPs + +MMPose provides [tools/analysis_tools/get_flops.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/analysis_tools/get_flops.py) to get model parameters and FLOPs. + +```shell +python tools/analysis_tools/get_flops.py ${CONFIG_FILE} [--shape ${INPUT_SHAPE}] [--cfg-options ${CFG_OPTIONS}] +``` + +Description of all arguments: + +`CONFIG_FILE` : The path of a model config file. + +`--shape`: The input shape to the model. + +`--input-constructor`: If specified as batch, it will generate a batch tensor to calculate FLOPs. + +`--batch-size`:If `--input-constructor` is specified as batch, it will generate a random tensor with shape `(batch_size, 3, **input_shape)` to calculate FLOPs. + +`--cfg-options`: If specified, the key-value pair optional `cfg` will be merged into config file. + +Example: + +```shell +python tools/analysis_tools/get_flops.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py +``` + +We will get the following results: + +```text +============================== +Input shape: (1, 3, 256, 192) +Flops: 7.7 GFLOPs +Params: 28.54 M +============================== +``` + +```{note} +This tool is still experimental and we do not guarantee that the number is absolutely correct. Some operators are not counted into FLOPs like GN and custom operators. +``` + +## Log Analysis + +MMPose provides [tools/analysis_tools/analyze_logs.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/analysis_tools/analyze_logs.py) to analyze the training log. The log file can be either a json file or a text file. The json file is recommended, because it is more convenient to parse and visualize. + +Currently, the following functions are supported: + +- Plot loss/accuracy curves +- Calculate training time + +### Plot Loss/Accuracy Curves + +The function depends on `seaborn`, please install it first by running `pip install seaborn`. + + + +```shell +python tools/analysis_tools/analyze_logs.py plot_curve ${JSON_LOGS} [--keys ${KEYS}] [--title ${TITLE}] [--legend ${LEGEND}] [--backend ${BACKEND}] [--style ${STYLE}] [--out ${OUT_FILE}] +``` + +Examples: + +- Plot loss curve + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_kpt --legend loss_kpt + ``` + +- Plot accuracy curve and export to PDF file + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys acc_pose --out results.pdf + ``` + +- Plot multiple log files on the same figure + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log1.json log2.json --keys loss_kpt --legend run1 run2 --title loss_kpt --out loss_kpt.png + ``` + +### Calculate Training Time + +```shell +python tools/analysis_tools/analyze_logs.py cal_train_time ${JSON_LOGS} [--include-outliers] +``` + +Examples: + +```shell +python tools/analysis_tools/analyze_logs.py cal_train_time log.json +``` + +The result is as follows: + +```text +-----Analyze train time of hrnet_w32_256x192.json----- +slowest epoch 56, average time is 0.6924 +fastest epoch 1, average time is 0.6502 +time std over epochs is 0.0085 +average iter time: 0.6688 s/iter +``` diff --git a/docs/en/user_guides/prepare_datasets.md b/docs/en/user_guides/prepare_datasets.md new file mode 100644 index 0000000000000000000000000000000000000000..be47e07b8f39ef4016b7562bf3e6295c58795c74 --- /dev/null +++ b/docs/en/user_guides/prepare_datasets.md @@ -0,0 +1,221 @@ +# Prepare Datasets + +In this document, we will give a guide on the process of preparing datasets for the MMPose. Various aspects of dataset preparation will be discussed, including using built-in datasets, creating custom datasets, combining datasets for training, browsing and downloading the datasets. + +## Use built-in datasets + +**Step 1**: Prepare Data + +MMPose supports multiple tasks and corresponding datasets. You can find them in [dataset zoo](https://mmpose.readthedocs.io/en/latest/dataset_zoo.html). To properly prepare your data, please follow the guidelines associated with your chosen dataset. + +**Step 2**: Configure Dataset Settings in the Config File + +Before training or evaluating models, you must configure the dataset settings. Take [`td-hm_hrnet-w32_8xb64-210e_coco-256x192.py`](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) for example, which can be used to train or evaluate the HRNet pose estimator on COCO dataset. We will go through the dataset configuration. + +- Basic Dataset Arguments + + ```python + # base dataset settings + dataset_type = 'CocoDataset' + data_mode = 'topdown' + data_root = 'data/coco/' + ``` + + - `dataset_type` specifies the class name of the dataset. Users can refer to [Datasets APIs](https://mmpose.readthedocs.io/en/latest/api.html#datasets) to find the class name of their desired dataset. + - `data_mode` determines the output format of the dataset, with two options available: `'topdown'` and `'bottomup'`. If `data_mode='topdown'`, the data element represents a single instance with its pose; otherwise, the data element is an entire image containing multiple instances and poses. + - `data_root` designates the root directory of the dataset. + +- Data Processing Pipelines + + ```python + # pipelines + train_pipeline = [ + dict(type='LoadImage'), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict(type='RandomBBoxTransform'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') + ] + val_pipeline = [ + dict(type='LoadImage'), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') + ] + ``` + + The `train_pipeline` and `val_pipeline` define the steps to process data elements during the training and evaluation phases, respectively. In addition to loading images and packing inputs, the `train_pipeline` primarily consists of data augmentation techniques and target generator, while the `val_pipeline` focuses on transforming data elements into a unified format. + +- Data Loaders + + ```python + # data loaders + train_dataloader = dict( + batch_size=64, + num_workers=2, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) + val_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) + test_dataloader = val_dataloader + ``` + + This section is crucial for configuring the dataset in the config file. In addition to the basic dataset arguments and pipelines discussed earlier, other important parameters are defined here. The `batch_size` determines the batch size per GPU; the `ann_file` indicates the annotation file for the dataset; and `data_prefix` specifies the image folder. The `bbox_file`, which supplies detected bounding box information, is only used in the val/test data loader for top-down datasets. + +We recommend copying the dataset configuration from provided config files that use the same dataset, rather than writing it from scratch, in order to minimize potential errors. By doing so, users can simply make the necessary modifications as needed, ensuring a more reliable and efficient setup process. + +## Use a custom dataset + +The [Customize Datasets](../advanced_guides/customize_datasets.md) guide provides detailed information on how to build a custom dataset. In this section, we will highlight some key tips for using and configuring custom datasets. + +- Determine the dataset class name. If you reorganize your dataset into the COCO format, you can simply use `CocoDataset` as the value for `dataset_type`. Otherwise, you will need to use the name of the custom dataset class you added. + +- Specify the meta information config file. MMPose 1.x employs a different strategy for specifying meta information compared to MMPose 0.x. In MMPose 1.x, users can specify the meta information config file as follows: + + ```python + train_dataloader = dict( + ... + dataset=dict( + type=dataset_type, + data_root='root/of/your/train/data', + ann_file='path/to/your/train/json', + data_prefix=dict(img='path/to/your/train/img'), + # specify dataset meta information + metainfo=dict(from_file='configs/_base_/datasets/custom.py'), + ...), + ) + ``` + + Note that the argument `metainfo` must be specified in the val/test data loaders as well. + +## Use mixed datasets for training + +MMPose offers a convenient and versatile solution for training with mixed datasets. Please refer to [Use Mixed Datasets for Training](./mixed_datasets.md). + +## Browse dataset + +`tools/analysis_tools/browse_dataset.py` helps the user to browse a pose dataset visually, or save the image to a designated directory. + +```shell +python tools/misc/browse_dataset.py ${CONFIG} [-h] [--output-dir ${OUTPUT_DIR}] [--not-show] [--phase ${PHASE}] [--mode ${MODE}] [--show-interval ${SHOW_INTERVAL}] +``` + +| ARGS | Description | +| -------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG` | The path to the config file. | +| `--output-dir OUTPUT_DIR` | The target folder to save visualization results. If not specified, the visualization results will not be saved. | +| `--not-show` | Do not show the visualization results in an external window. | +| `--phase {train, val, test}` | Options for dataset. | +| `--mode {original, transformed}` | Specify the type of visualized images. `original` means to show images without pre-processing; `transformed` means to show images are pre-processed. | +| `--show-interval SHOW_INTERVAL` | Time interval between visualizing two images. | + +For instance, users who want to visualize images and annotations in COCO dataset use: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode original +``` + +The bounding boxes and keypoints will be plotted on the original image. Following is an example: + + +The original images need to be processed before being fed into models. To visualize pre-processed images and annotations, users need to modify the argument `mode` to `transformed`. For example: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode transformed +``` + +Here is a processed sample + + + +The heatmap target will be visualized together if it is generated in the pipeline. + +## Download dataset via MIM + +By using [OpenXLab](https://openxlab.org.cn/datasets), you can obtain free formatted datasets in various fields. Through the search function of the platform, you may address the dataset they look for quickly and easily. Using the formatted datasets from the platform, you can efficiently conduct tasks across datasets. + +If you use MIM to download, make sure that the version is greater than v0.3.8. You can use the following command to update, install, login and download the dataset: + +```shell +# upgrade your MIM +pip install -U openmim + +# install OpenXLab CLI tools +pip install -U openxlab +# log in OpenXLab +openxlab login + +# download coco2017 and preprocess by MIM +mim download mmpose --dataset coco2017 +``` + +### Supported datasets + +Here is the list of supported datasets, we will continue to update it in the future. + +#### Body + +| Dataset name | Download command | +| ------------- | ----------------------------------------- | +| COCO 2017 | `mim download mmpose --dataset coco2017` | +| MPII | `mim download mmpose --dataset mpii` | +| AI Challenger | `mim download mmpose --dataset aic` | +| CrowdPose | `mim download mmpose --dataset crowdpose` | + +#### Face + +| Dataset name | Download command | +| ------------ | ------------------------------------ | +| LaPa | `mim download mmpose --dataset lapa` | +| 300W | `mim download mmpose --dataset 300w` | +| WFLW | `mim download mmpose --dataset wflw` | + +#### Hand + +| Dataset name | Download command | +| ------------ | ------------------------------------------ | +| OneHand10K | `mim download mmpose --dataset onehand10k` | +| FreiHand | `mim download mmpose --dataset freihand` | +| HaGRID | `mim download mmpose --dataset hagrid` | + +#### Whole Body + +| Dataset name | Download command | +| ------------ | ------------------------------------- | +| Halpe | `mim download mmpose --dataset halpe` | + +#### Animal + +| Dataset name | Download command | +| ------------ | ------------------------------------- | +| AP-10K | `mim download mmpose --dataset ap10k` | + +#### Fashion + +Coming Soon diff --git a/docs/en/user_guides/train_and_test.md b/docs/en/user_guides/train_and_test.md new file mode 100644 index 0000000000000000000000000000000000000000..c11a3988cb5819686f6e6154ecc166935cc85a3f --- /dev/null +++ b/docs/en/user_guides/train_and_test.md @@ -0,0 +1,523 @@ +# Training and Testing + +## Launch training + +### Train with your PC + +You can use `tools/train.py` to train a model on a single machine with a CPU and optionally a GPU. + +Here is the full usage of the script: + +```shell +python tools/train.py ${CONFIG_FILE} [ARGS] +``` + +```{note} +By default, MMPose prefers GPU to CPU. If you want to train a model on CPU, please empty `CUDA_VISIBLE_DEVICES` or set it to -1 to make GPU invisible to the program. +``` + +```shell +CUDA_VISIBLE_DEVICES=-1 python tools/train.py ${CONFIG_FILE} [ARGS] +``` + +| ARGS | Description | +| ------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | The path to the config file. | +| `--work-dir WORK_DIR` | The target folder to save logs and checkpoints. Defaults to a folder with the same name as the config file under `./work_dirs`. | +| `--resume [RESUME]` | Resume training. If specify a path, resume from it, while if not specify, try to auto resume from the latest checkpoint. | +| `--amp` | Enable automatic-mixed-precision training. | +| `--no-validate` | **Not suggested**. Disable checkpoint evaluation during training. | +| `--auto-scale-lr` | Automatically rescale the learning rate according to the actual batch size and the original batch size. | +| `--cfg-options CFG_OPTIONS` | Override some settings in the used config, the key-value pair in xxx=yyy format will be merged into the config file. If the value to be overwritten is a list, it should be of the form of either `key="[a,b]"` or `key=a,b`. The argument also allows nested list/tuple values, e.g. `key="[(a,b),(c,d)]"`. Note that quotation marks are necessary and that **no white space is allowed**. | +| `--show-dir SHOW_DIR` | The directory to save the result visualization images generated during validation. | +| `--show` | Visualize the prediction result in a window. | +| `--interval INTERVAL` | The interval of samples to visualize. | +| `--wait-time WAIT_TIME` | The display time of every window (in seconds). Defaults to 1. | +| `--launcher {none,pytorch,slurm,mpi}` | Options for job launcher. | + +### Train with multiple GPUs + +We provide a shell script to start a multi-GPUs task with `torch.distributed.launch`. + +```shell +bash ./tools/dist_train.sh ${CONFIG_FILE} ${GPU_NUM} [PY_ARGS] +``` + +| ARGS | Description | +| ------------- | ---------------------------------------------------------------------------------- | +| `CONFIG_FILE` | The path to the config file. | +| `GPU_NUM` | The number of GPUs to be used. | +| `[PYARGS]` | The other optional arguments of `tools/train.py`, see [here](#train-with-your-pc). | + +You can also specify extra arguments of the launcher by environment variables. For example, change the +communication port of the launcher to 29666 by the below command: + +```shell +PORT=29666 bash ./tools/dist_train.sh ${CONFIG_FILE} ${GPU_NUM} [PY_ARGS] +``` + +If you want to startup multiple training jobs and use different GPUs, you can launch them by specifying +different port and visible devices. + +```shell +CUDA_VISIBLE_DEVICES=0,1,2,3 PORT=29500 bash ./tools/dist_train.sh ${CONFIG_FILE1} 4 [PY_ARGS] +CUDA_VISIBLE_DEVICES=4,5,6,7 GPUS=29501 bash ./tools/dist_train.sh ${CONFIG_FILE2} 4 [PY_ARGS] +``` + +### Train with multiple machines + +#### Multiple machines in the same network + +If you launch a training job with multiple machines connected with ethernet, you can run the following commands: + +On the first machine: + +```shell +NNODES=2 NODE_RANK=0 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_train.sh $CONFIG $GPUS +``` + +On the second machine: + +```shell +NNODES=2 NODE_RANK=1 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_train.sh $CONFIG $GPUS +``` + +Compared with multi-GPUs in a single machine, you need to specify some extra environment variables: + +| ENV_VARS | Description | +| ------------- | ---------------------------------------------------------------------------- | +| `NNODES` | The total number of machines. | +| `NODE_RANK` | The index of the local machine. | +| `PORT` | The communication port, it should be the same in all machines. | +| `MASTER_ADDR` | The IP address of the master machine, it should be the same in all machines. | + +Usually, it is slow if you do not have high-speed networking like InfiniBand. + +#### Multiple machines managed with slurm + +If you run MMPose on a cluster managed with [slurm](https://slurm.schedmd.com/), you can use the script `slurm_train.sh`. + +```shell +[ENV_VARS] ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${WORK_DIR} [PY_ARGS] +``` + +Here are the arguments description of the script. + +| ARGS | Description | +| ------------- | ---------------------------------------------------------------------------------- | +| `PARTITION` | The partition to use in your cluster. | +| `JOB_NAME` | The name of your job, you can name it as you like. | +| `CONFIG_FILE` | The path to the config file. | +| `WORK_DIR` | The target folder to save logs and checkpoints. | +| `[PYARGS]` | The other optional arguments of `tools/train.py`, see [here](#train-with-your-pc). | + +Here are the environment variables that can be used to configure the slurm job. + +| ENV_VARS | Description | +| --------------- | ---------------------------------------------------------------------------------------------------------- | +| `GPUS` | The total number of GPUs to be used. Defaults to 8. | +| `GPUS_PER_NODE` | The number of GPUs to be allocated per node. Defaults to 8. | +| `CPUS_PER_TASK` | The number of CPUs to be allocated per task (Usually one GPU corresponds to one task). Defaults to 5. | +| `SRUN_ARGS` | The other arguments of `srun`. Available options can be found [here](https://slurm.schedmd.com/srun.html). | + +## Resume training + +Resume training means to continue training from the state saved from one of the previous trainings, where the state includes the model weights, the state of the optimizer and the optimizer parameter adjustment strategy. + +### Automatically resume training + +Users can add `--resume` to the end of the training command to resume training. The program will automatically load the latest weight file from `work_dirs` to resume training. If there is a latest `checkpoint` in `work_dirs` (e.g. the training was interrupted during the previous training), the training will be resumed from the `checkpoint`. Otherwise (e.g. the previous training did not save `checkpoint` in time or a new training task was started), the training will be restarted. + +Here is an example of resuming training: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py --resume +``` + +### Specify the checkpoint to resume training + +You can also specify the `checkpoint` path for `--resume`. MMPose will automatically read the `checkpoint` and resume training from it. The command is as follows: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py \ + --resume work_dirs/td-hm_res50_8xb64-210e_coco-256x192/latest.pth +``` + +If you hope to manually specify the `checkpoint` path in the config file, in addition to setting `resume=True`, you also need to set the `load_from`. + +It should be noted that if only `load_from` is set without setting `resume=True`, only the weights in the `checkpoint` will be loaded and the training will be restarted from scratch, instead of continuing from the previous state. + +The following example is equivalent to the example above that specifies the `--resume` parameter: + +```python +resume = True +load_from = 'work_dirs/td-hm_res50_8xb64-210e_coco-256x192/latest.pth' +# model settings +model = dict( + ## omitted ## + ) +``` + +## Freeze partial parameters during training + +In some scenarios, it might be desirable to freeze certain parameters of a model during training to fine-tune specific parts or to prevent overfitting. In MMPose, you can set different hyperparameters for any module in the model by setting custom_keys in `paramwise_cfg`. This allows you to control the learning rate and decay coefficient for specific parts of the model. + +For example, if you want to freeze the parameters in `backbone.layer0` and `backbone.layer1`, you can modify the optimizer wrapper in the config file as: + +```python +optim_wrapper = dict( + optimizer=dict(...), + paramwise_cfg=dict( + custom_keys={ + 'backbone.layer0': dict(lr_mult=0, decay_mult=0), + 'backbone.layer0': dict(lr_mult=0, decay_mult=0), + })) +``` + +This configuration will freeze the parameters in `backbone.layer0` and `backbone.layer1` by setting their learning rate and decay coefficient to 0. By using this approach, you can effectively control the training process and fine-tune specific parts of your model as needed. + +## Automatic Mixed Precision (AMP) training + +Mixed precision training can reduce training time and storage requirements without changing the model or reducing the model training accuracy, thus supporting larger batch sizes, larger models, and larger input sizes. + +To enable Automatic Mixing Precision (AMP) training, add `--amp` to the end of the training command, which is as follows: + +```shell +python tools/train.py ${CONFIG_FILE} --amp +``` + +Specific examples are as follows: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py --amp +``` + +## Set the random seed + +If you want to specify the random seed during training, you can use the following command: + +```shell +python ./tools/train.py \ + ${CONFIG} \ # config file + --cfg-options randomness.seed=2023 \ # set the random seed = 2023 + [randomness.diff_rank_seed=True] \ # Set different seeds according to rank. + [randomness.deterministic=True] # Set the cuDNN backend deterministic option to True +# `[]` stands for optional parameters, when actually entering the command line, you do not need to enter `[]` +``` + +`randomness` has three parameters that can be set, with the following meanings. + +- `randomness.seed=2023`, set the random seed to `2023`. + +- `randomness.diff_rank_seed=True`, set different seeds according to global `rank`. Defaults to `False`. + +- `randomness.deterministic=True`, set the deterministic option for `cuDNN` backend, i.e., set `torch.backends.cudnn.deterministic` to `True` and `torch.backends.cudnn.benchmark` to `False`. Defaults to `False`. See [Pytorch Randomness](https://pytorch.org/docs/stable/notes/randomness.html) for more details. + +## Training Log + +During training, the training log will be printed in the console as follows: + +```shell +07/14 08:26:50 - mmengine - INFO - Epoch(train) [38][ 6/38] base_lr: 5.148343e-04 lr: 5.148343e-04 eta: 0:15:34 time: 0.540754 data_time: 0.394292 memory: 3141 loss: 0.006220 loss_kpt: 0.006220 acc_pose: 1.000000 +``` + +The training log contains the following information: + +- `07/14 08:26:50`: The current time. +- `mmengine`: The name of the program. +- `INFO` or `WARNING`: The log level. +- `Epoch(train)`: The current training stage. `train` means the training stage, `val` means the validation stage. +- `[38][ 6/38]`: The current epoch and the current iteration. +- `base_lr`: The base learning rate. +- `lr`: The current (real) learning rate. +- `eta`: The estimated time of arrival. +- `time`: The elapsed time (minutes) of the current iteration. +- `data_time`: The elapsed time (minutes) of data processing (i/o and transforms). +- `memory`: The GPU memory (MB) allocated by the program. +- `loss`: The total loss value of the current iteration. +- `loss_kpt`: The loss value you passed in head module. +- `acc_pose`: The accuracy value you passed in head module. + +## Visualize training process + +Monitoring the training process is essential for understanding the performance of your model and making necessary adjustments. In this section, we will introduce two methods to visualize the training process of your MMPose model: TensorBoard and the MMEngine Visualizer. + +### TensorBoard + +TensorBoard is a powerful tool that allows you to visualize the changes in losses during training. To enable TensorBoard visualization, you may need to: + +1. Install TensorBoard environment + + ```shell + pip install tensorboard + ``` + +2. Enable TensorBoard in the config file + + ```python + visualizer = dict(vis_backends=[ + dict(type='LocalVisBackend'), + dict(type='TensorboardVisBackend'), + ]) + ``` + +The event file generated by TensorBoard will be save under the experiment log folder `${WORK_DIR}`, which defaults to `work_dir/${CONFIG}` or can be specified using the `--work-dir` option. To visualize the training process, use the following command: + +```shell +tensorboard --logdir ${WORK_DIR}/${TIMESTAMP}/vis_data +``` + +### MMEngine visualizer + +MMPose also supports visualizing model inference results during validation. To activate this function, please use the `--show` option or set `--show-dir` when launching training. This feature provides an effective way to analyze the model's performance on specific examples and make any necessary adjustments. + +## Test your model + +### Test with your PC + +You can use `tools/test.py` to test a model on a single machine with a CPU and optionally a GPU. + +Here is the full usage of the script: + +```shell +python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [ARGS] +``` + +```{note} +By default, MMPose prefers GPU to CPU. If you want to test a model on CPU, please empty `CUDA_VISIBLE_DEVICES` or set it to -1 to make GPU invisible to the program. +``` + +```shell +CUDA_VISIBLE_DEVICES=-1 python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [ARGS] +``` + +| ARGS | Description | +| ------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | The path to the config file. | +| `CHECKPOINT_FILE` | The path to the checkpoint file (It can be a http link, and you can find checkpoints [here](https://MMPose.readthedocs.io/en/latest/model_zoo.html)). | +| `--work-dir WORK_DIR` | The directory to save the file containing evaluation metrics. | +| `--out OUT` | The path to save the file containing evaluation metrics. | +| `--dump DUMP` | The path to dump all outputs of the model for offline evaluation. | +| `--cfg-options CFG_OPTIONS` | Override some settings in the used config, the key-value pair in xxx=yyy format will be merged into the config file. If the value to be overwritten is a list, it should be of the form of either `key="[a,b]"` or `key=a,b`. The argument also allows nested list/tuple values, e.g. `key="[(a,b),(c,d)]"`. Note that quotation marks are necessary and that no white space is allowed. | +| `--show-dir SHOW_DIR` | The directory to save the result visualization images. | +| `--show` | Visualize the prediction result in a window. | +| `--interval INTERVAL` | The interval of samples to visualize. | +| `--wait-time WAIT_TIME` | The display time of every window (in seconds). Defaults to 1. | +| `--launcher {none,pytorch,slurm,mpi}` | Options for job launcher. | + +### Test with multiple GPUs + +We provide a shell script to start a multi-GPUs task with `torch.distributed.launch`. + +```shell +bash ./tools/dist_test.sh ${CONFIG_FILE} ${CHECKPOINT_FILE} ${GPU_NUM} [PY_ARGS] +``` + +| ARGS | Description | +| ----------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | The path to the config file. | +| `CHECKPOINT_FILE` | The path to the checkpoint file (It can be a http link, and you can find checkpoints [here](https://mmpose.readthedocs.io/en/latest/model_zoo.html)). | +| `GPU_NUM` | The number of GPUs to be used. | +| `[PYARGS]` | The other optional arguments of `tools/test.py`, see [here](#test-with-your-pc). | + +You can also specify extra arguments of the launcher by environment variables. For example, change the +communication port of the launcher to 29666 by the below command: + +```shell +PORT=29666 bash ./tools/dist_test.sh ${CONFIG_FILE} ${CHECKPOINT_FILE} ${GPU_NUM} [PY_ARGS] +``` + +If you want to startup multiple test jobs and use different GPUs, you can launch them by specifying +different port and visible devices. + +```shell +CUDA_VISIBLE_DEVICES=0,1,2,3 PORT=29500 bash ./tools/dist_test.sh ${CONFIG_FILE1} ${CHECKPOINT_FILE} 4 [PY_ARGS] +CUDA_VISIBLE_DEVICES=4,5,6,7 PORT=29501 bash ./tools/dist_test.sh ${CONFIG_FILE2} ${CHECKPOINT_FILE} 4 [PY_ARGS] +``` + +### Test with multiple machines + +#### Multiple machines in the same network + +If you launch a test job with multiple machines connected with ethernet, you can run the following commands: + +On the first machine: + +```shell +NNODES=2 NODE_RANK=0 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_test.sh $CONFIG $CHECKPOINT_FILE $GPUS +``` + +On the second machine: + +```shell +NNODES=2 NODE_RANK=1 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_test.sh $CONFIG $CHECKPOINT_FILE $GPUS +``` + +Compared with multi-GPUs in a single machine, you need to specify some extra environment variables: + +| ENV_VARS | Description | +| ------------- | ---------------------------------------------------------------------------- | +| `NNODES` | The total number of machines. | +| `NODE_RANK` | The index of the local machine. | +| `PORT` | The communication port, it should be the same in all machines. | +| `MASTER_ADDR` | The IP address of the master machine, it should be the same in all machines. | + +Usually, it is slow if you do not have high-speed networking like InfiniBand. + +#### Multiple machines managed with slurm + +If you run MMPose on a cluster managed with [slurm](https://slurm.schedmd.com/), you can use the script `slurm_test.sh`. + +```shell +[ENV_VARS] ./tools/slurm_test.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${CHECKPOINT_FILE} [PY_ARGS] +``` + +Here are the argument descriptions of the script. + +| ARGS | Description | +| ----------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------- | +| `PARTITION` | The partition to use in your cluster. | +| `JOB_NAME` | The name of your job, you can name it as you like. | +| `CONFIG_FILE` | The path to the config file. | +| `CHECKPOINT_FILE` | The path to the checkpoint file (It can be a http link, and you can find checkpoints [here](https://MMPose.readthedocs.io/en/latest/model_zoo.html)). | +| `[PYARGS]` | The other optional arguments of `tools/test.py`, see [here](#test-with-your-pc). | + +Here are the environment variables that can be used to configure the slurm job. + +| ENV_VARS | Description | +| --------------- | ---------------------------------------------------------------------------------------------------------- | +| `GPUS` | The total number of GPUs to be used. Defaults to 8. | +| `GPUS_PER_NODE` | The number of GPUs to be allocated per node. Defaults to 8. | +| `CPUS_PER_TASK` | The number of CPUs to be allocated per task (Usually one GPU corresponds to one task). Defaults to 5. | +| `SRUN_ARGS` | The other arguments of `srun`. Available options can be found [here](https://slurm.schedmd.com/srun.html). | + +## Custom Testing Features + +### Test with Custom Metrics + +If you're looking to assess models using unique metrics not already supported by MMPose, you'll need to code these metrics yourself and include them in your config file. For guidance on how to accomplish this, check out our [customized evaluation guide](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_evaluation.html). + +### Evaluating Across Multiple Datasets + +MMPose offers a handy tool known as `MultiDatasetEvaluator` for streamlined assessment across multiple datasets. Setting up this evaluator in your config file is a breeze. Below is a quick example demonstrating how to evaluate a model using both the COCO and AIC datasets: + +```python +# Set up validation datasets +coco_val = dict(type='CocoDataset', ...) +aic_val = dict(type='AicDataset', ...) +val_dataset = dict( + type='CombinedDataset', + datasets=[coco_val, aic_val], + pipeline=val_pipeline, + ...) + +# configurate the evaluator +val_evaluator = dict( + type='MultiDatasetEvaluator', + metrics=[ # metrics for each dataset + dict(type='CocoMetric', + ann_file='data/coco/annotations/person_keypoints_val2017.json'), + dict(type='CocoMetric', + ann_file='data/aic/annotations/aic_val.json', + use_area=False, + prefix='aic') + ], + # the number and order of datasets must align with metrics + datasets=[coco_val, aic_val], + ) +``` + +Keep in mind that different datasets, like COCO and AIC, have various keypoint definitions. Yet, the model's output keypoints are standardized. This results in a discrepancy between the model outputs and the actual ground truth. To address this, you can employ `KeypointConverter` to align the keypoint configurations between different datasets. Here’s a full example that shows how to leverage `KeypointConverter` to align AIC keypoints with COCO keypoints: + +```python +aic_to_coco_converter = dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + +# val datasets +coco_val = dict( + type='CocoDataset', + data_root='data/coco/', + data_mode='topdown', + ann_file='annotations/person_keypoints_val2017.json', + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=[], +) + +aic_val = dict( + type='AicDataset', + data_root='data/aic/', + data_mode=data_mode, + ann_file='annotations/aic_val.json', + data_prefix=dict(img='ai_challenger_keypoint_validation_20170911/' + 'keypoint_validation_images_20170911/'), + test_mode=True, + pipeline=[], + ) + +val_dataset = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[coco_val, aic_val], + pipeline=val_pipeline, + test_mode=True, + ) + +val_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=val_dataset) + +test_dataloader = val_dataloader + +val_evaluator = dict( + type='MultiDatasetEvaluator', + metrics=[ + dict(type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json'), + dict(type='CocoMetric', + ann_file='data/aic/annotations/aic_val.json', + use_area=False, + gt_converter=aic_to_coco_converter, + prefix='aic') + ], + datasets=val_dataset['datasets'], + ) + +test_evaluator = val_evaluator +``` + +For further clarification on converting AIC keypoints to COCO keypoints, please consult [this guide](https://mmpose.readthedocs.io/en/latest/user_guides/mixed_datasets.html#merge-aic-into-coco). + +### Evaluating Top-down Models with Custom Detector + +To evaluate top-down models, you can use either ground truth or pre-detected bounding boxes. The `bbox_file` provides these boxes, generated by a specific detector. For instance, `COCO_val2017_detections_AP_H_56_person.json` contains bounding boxes for the COCO val2017 dataset, generated using a detector with a human AP of 56.4. To create your own `bbox_file` using a custom detector supported by MMDetection, run the following command: + +```sh +python tools/misc/generate_bbox_file.py \ + ${DET_CONFIG} ${DET_WEIGHT} ${OUTPUT_FILE_NAME} \ + [--pose-config ${POSE_CONFIG}] \ + [--score-thr ${SCORE_THRESHOLD}] [--nms-thr ${NMS_THRESHOLD}] +``` + +Here, the `DET_CONFIG` and `DET_WEIGHT` initialize the detector. `POSE_CONFIG` specifies the test dataset requiring bounding box detection, while `SCORE_THRESHOLD` and `NMS_THRESHOLD` arguments are used for bounding box filtering. diff --git a/docs/en/visualization.md b/docs/en/visualization.md new file mode 100644 index 0000000000000000000000000000000000000000..2dd39c6f655c587bd3806df43448de36ebed7b66 --- /dev/null +++ b/docs/en/visualization.md @@ -0,0 +1,103 @@ +# Visualization + +- [Single Image](#single-image) +- [Browse Dataset](#browse-dataset) +- [Visualizer Hook](#visualizer-hook) + +## Single Image + +`demo/image_demo.py` helps the user to visualize the prediction result of a single image, including the skeleton and heatmaps. + +```shell +python demo/image_demo.py ${IMG} ${CONFIG} ${CHECKPOINT} [-h] [--out-file OUT_FILE] [--device DEVICE] [--draw-heatmap] +``` + +| ARGS | Description | +| --------------------- | -------------------------------- | +| `IMG` | The path to the test image. | +| `CONFIG` | The path to the config file. | +| `CHECKPOINT` | The path to the checkpoint file. | +| `--out-file OUT_FILE` | Path to output file. | +| `--device DEVICE` | Device used for inference. | +| `--draw-heatmap` | Visualize the predicted heatmap. | + +Here is an example of Heatmap visualization: + + + +## Browse Dataset + +`tools/analysis_tools/browse_dataset.py` helps the user to browse a pose dataset visually, or save the image to a designated directory. + +```shell +python tools/misc/browse_dataset.py ${CONFIG} [-h] [--output-dir ${OUTPUT_DIR}] [--not-show] [--phase ${PHASE}] [--mode ${MODE}] [--show-interval ${SHOW_INTERVAL}] +``` + +| ARGS | Description | +| -------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG` | The path to the config file. | +| `--output-dir OUTPUT_DIR` | The target folder to save visualization results. If not specified, the visualization results will not be saved. | +| `--not-show` | Do not show the visualization results in an external window. | +| `--phase {train, val, test}` | Options for dataset. | +| `--mode {original, transformed}` | Specify the type of visualized images. `original` means to show images without pre-processing; `transformed` means to show images are pre-processed. | +| `--show-interval SHOW_INTERVAL` | Time interval between visualizing two images. | + +For instance, users who want to visualize images and annotations in COCO dataset use: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode original +``` + +The bounding boxes and keypoints will be plotted on the original image. Following is an example: + + +The original images need to be processed before being fed into models. To visualize pre-processed images and annotations, users need to modify the argument `mode` to `transformed`. For example: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode transformed +``` + +Here is a processed sample + + + +The heatmap target will be visualized together if it is generated in the pipeline. + +## Visualizer Hook + +During validation and testing, users can specify certain arguments to visualize the output of trained models. + +To visualize in external window during testing: + +```shell +python tools/test.py ${CONFIG} ${CHECKPOINT} --show +``` + +During validation: + +```shell +python tools/train.py ${CONFIG} --work-dir ${WORK_DIR} --show --interval ${INTERVAL} +``` + +It is suggested to use large `INTERVAL` (e.g., 50) if users want to visualize during validation, since the wait time for each visualized instance will make the validation process very slow. + +To save visualization results in `SHOW_DIR` during testing: + +```shell +python tools/test.py ${CONFIG} ${CHECKPOINT} --show-dir=${SHOW_DIR} +``` + +During validation: + +```shell +python tools/train.py ${CONFIG} --work-dir ${WORK_DIR} --show-dir=${SHOW_DIR} +``` + +More details about visualization arguments can be found in [train_and_test](./train_and_test.md). + +If you use a heatmap-based method and want to visualize predicted heatmaps, you can manually specify `output_heatmaps=True` for `model.test_cfg` in config file. Another way is to add `--cfg-options='model.test_cfg.output_heatmaps=True'` at the end of your command. + +Visualization example (top: decoded keypoints; bottom: predicted heatmap): + + +For top-down models, each sample only contains one instance. So there will be multiple visualization results for each image. diff --git a/docs/src/papers/algorithms/associative_embedding.md b/docs/src/papers/algorithms/associative_embedding.md new file mode 100644 index 0000000000000000000000000000000000000000..3a27267ae9f822e0609bc8513835dbcef7ef343a --- /dev/null +++ b/docs/src/papers/algorithms/associative_embedding.md @@ -0,0 +1,30 @@ +# Associative embedding: End-to-end learning for joint detection and grouping (AE) + + + +
+
+
+## Abstract
+
+
+
+We introduce associative embedding, a novel method for supervising convolutional neural networks for the task of detection and grouping. A number of computer vision problems can be framed in this manner including multi-person pose estimation, instance segmentation, and multi-object tracking. Usually the grouping of detections is achieved with multi-stage pipelines, instead we propose an approach that teaches a network to simultaneously output detections and group assignments. This technique can be easily integrated into any state-of-the-art network architecture that produces pixel-wise predictions. We show how to apply this method to both multi-person pose estimation and instance segmentation and report state-of-the-art performance for multi-person pose on the MPII and MS-COCO datasets.
+
+
+
+Associative Embedding (NIPS'2017)
+ +```bibtex +@inproceedings{newell2017associative, + title={Associative embedding: End-to-end learning for joint detection and grouping}, + author={Newell, Alejandro and Huang, Zhiao and Deng, Jia}, + booktitle={Advances in neural information processing systems}, + pages={2277--2287}, + year={2017} +} +``` + +
+
+
diff --git a/docs/src/papers/algorithms/awingloss.md b/docs/src/papers/algorithms/awingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..4d4b93a87c622b6b965cab31ac402b8445934a9a
--- /dev/null
+++ b/docs/src/papers/algorithms/awingloss.md
@@ -0,0 +1,31 @@
+# Adaptive Wing Loss for Robust Face Alignment via Heatmap Regression
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Heatmap regression with a deep network has become one of the mainstream approaches to localize facial landmarks. However, the loss function for heatmap regression is rarely studied. In this paper, we analyze the ideal loss function properties for heatmap regression in face alignment problems. Then we propose a novel loss function, named Adaptive Wing loss, that is able to adapt its shape to different types of ground truth heatmap pixels. This adaptability penalizes loss more on foreground pixels while less on background pixels. To address the imbalance between foreground and background pixels, we also propose Weighted Loss Map, which assigns high weights on foreground and difficult background pixels to help training process focus more on pixels that are crucial to landmark localization. To further improve face alignment accuracy, we introduce boundary prediction and CoordConv with boundary coordinates. Extensive experiments on different benchmarks, including COFW, 300W and WFLW, show our approach outperforms the state-of-the-art by a significant margin on
+various evaluation metrics. Besides, the Adaptive Wing loss also helps other heatmap regression tasks.
+
+
+
+AdaptiveWingloss (ICCV'2019)
+ +```bibtex +@inproceedings{wang2019adaptive, + title={Adaptive wing loss for robust face alignment via heatmap regression}, + author={Wang, Xinyao and Bo, Liefeng and Fuxin, Li}, + booktitle={Proceedings of the IEEE/CVF international conference on computer vision}, + pages={6971--6981}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/cid.md b/docs/src/papers/algorithms/cid.md
new file mode 100644
index 0000000000000000000000000000000000000000..4366f95504614a2f58c7449710ac0447ca68db16
--- /dev/null
+++ b/docs/src/papers/algorithms/cid.md
@@ -0,0 +1,31 @@
+# Contextual Instance Decoupling for Robust Multi-Person Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Crowded scenes make it challenging to differentiate persons and locate their pose keypoints. This paper proposes the Contextual Instance Decoupling (CID), which presents a new pipeline for multi-person pose estimation. Instead of relying on person bounding boxes to spatially differentiate persons, CID decouples persons in an image into multiple instance-aware feature maps. Each of those feature maps is hence adopted to infer keypoints for a specific person. Compared with bounding box detection, CID is differentiable and robust to detection errors. Decoupling persons into different feature maps allows to isolate distractions from other persons, and explore context cues at scales larger than the bounding box size. Experiments show that CID outperforms previous multi-person pose estimation pipelines on crowded scenes pose estimation benchmarks in both accuracy and efficiency. For instance, it achieves 71.3% AP on CrowdPose, outperforming the recent single-stage DEKR by 5.6%, the bottom-up CenterAttention by 3.7%, and the top-down JCSPPE by 5.3%. This advantage sustains on the commonly used COCO benchmark.
+
+
+
+CID (CVPR'2022)
+ +```bibtex +@InProceedings{Wang_2022_CVPR, + author = {Wang, Dongkai and Zhang, Shiliang}, + title = {Contextual Instance Decoupling for Robust Multi-Person Pose Estimation}, + booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2022}, + pages = {11060-11068} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/cpm.md b/docs/src/papers/algorithms/cpm.md
new file mode 100644
index 0000000000000000000000000000000000000000..fb5dbfacec909f86b58d1ed4b24e75cad039c49e
--- /dev/null
+++ b/docs/src/papers/algorithms/cpm.md
@@ -0,0 +1,30 @@
+# Convolutional pose machines
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We introduce associative embedding, a novel method for supervising convolutional neural networks for the task of detection and grouping. A number of computer vision problems can be framed in this manner including multi-person pose estimation, instance segmentation, and multi-object tracking. Usually the grouping of detections is achieved with multi-stage pipelines, instead we propose an approach that teaches a network to simultaneously output detections and group assignments. This technique can be easily integrated into any state-of-the-art network architecture that produces pixel-wise predictions. We show how to apply this method to both multi-person pose estimation and instance segmentation and report state-of-the-art performance for multi-person pose on the MPII and MS-COCO datasets.
+
+
+
+CPM (CVPR'2016)
+ +```bibtex +@inproceedings{wei2016convolutional, + title={Convolutional pose machines}, + author={Wei, Shih-En and Ramakrishna, Varun and Kanade, Takeo and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={4724--4732}, + year={2016} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/dark.md b/docs/src/papers/algorithms/dark.md
new file mode 100644
index 0000000000000000000000000000000000000000..083b7596ab1e7aadb3f154eea58a170b7b22fb54
--- /dev/null
+++ b/docs/src/papers/algorithms/dark.md
@@ -0,0 +1,30 @@
+# Distribution-aware coordinate representation for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+While being the de facto standard coordinate representation for human pose estimation, heatmap has not been investigated in-depth. This work fills this gap. For the first time, we find that the process of decoding the predicted heatmaps into the final joint coordinates in the original image space is surprisingly significant for the performance. We further probe the design limitations of the standard coordinate decoding method, and propose a more principled distributionaware decoding method. Also, we improve the standard coordinate encoding process (i.e. transforming ground-truth coordinates to heatmaps) by generating unbiased/accurate heatmaps. Taking the two together, we formulate a novel Distribution-Aware coordinate Representation of Keypoints (DARK) method. Serving as a model-agnostic plug-in, DARK brings about significant performance boost to existing human pose estimation models. Extensive experiments show that DARK yields the best results on two common benchmarks, MPII and COCO. Besides, DARK achieves the 2nd place entry in the ICCV 2019 COCO Keypoints Challenge. The code is available online.
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/debias_ipr.md b/docs/src/papers/algorithms/debias_ipr.md
new file mode 100644
index 0000000000000000000000000000000000000000..8d77c84c09c46875e4a294d846ee8a9feb2ad1d0
--- /dev/null
+++ b/docs/src/papers/algorithms/debias_ipr.md
@@ -0,0 +1,30 @@
+# Removing the Bias of Integral Pose Regression
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Heatmap-based detection methods are dominant for 2D human pose estimation even though regression is more intuitive. The introduction of the integral regression method, which, architecture-wise uses an implicit heatmap, brings the two approaches even closer together. This begs the question -- does detection really outperform regression? In this paper, we investigate the difference in supervision between the heatmap-based detection and integral regression, as this is the key remaining difference between the two approaches. In the process, we discover an underlying bias behind integral pose regression that arises from taking the expectation after the softmax function. To counter the bias, we present a compensation method which we find to improve integral regression accuracy on all 2D pose estimation benchmarks. We further propose a simple combined detection and bias-compensated regression method that considerably outperforms state-of-the-art baselines with few added components.
+
+
+
+Debias IPR (ICCV'2021)
+ +```bibtex +@inproceedings{gu2021removing, + title={Removing the Bias of Integral Pose Regression}, + author={Gu, Kerui and Yang, Linlin and Yao, Angela}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11067--11076}, + year={2021} + } +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/deeppose.md b/docs/src/papers/algorithms/deeppose.md
new file mode 100644
index 0000000000000000000000000000000000000000..24778ba9db6ecfa35ea2dfabc68cadfeb3b24d7c
--- /dev/null
+++ b/docs/src/papers/algorithms/deeppose.md
@@ -0,0 +1,30 @@
+# DeepPose: Human pose estimation via deep neural networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We propose a method for human pose estimation based on Deep Neural Networks (DNNs). The pose estimation is formulated as a DNN-based regression problem towards body joints. We present a cascade of such DNN regressors which results in high precision pose estimates. The approach has the advantage of reasoning about pose in a holistic fashion and has a simple but yet powerful formulation which capitalizes on recent advances in Deep Learning. We present a detailed empirical analysis with state-of-art or better performance on four academic benchmarks of diverse real-world images.
+
+
+
+DeepPose (CVPR'2014)
+ +```bibtex +@inproceedings{toshev2014deeppose, + title={Deeppose: Human pose estimation via deep neural networks}, + author={Toshev, Alexander and Szegedy, Christian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1653--1660}, + year={2014} +} +``` + +
+
+
diff --git a/docs/src/papers/algorithms/dekr.md b/docs/src/papers/algorithms/dekr.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee19a3315b96d4e95f3d3bb9c61fa31b823e6e7e
--- /dev/null
+++ b/docs/src/papers/algorithms/dekr.md
@@ -0,0 +1,31 @@
+# Bottom-up Human Pose Estimation via Disentangled Keypoint Regression
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we are interested in the bottom-up paradigm of estimating human poses from an image. We study the dense keypoint regression framework that is previously inferior to the keypoint detection and grouping framework. Our motivation is that regressing keypoint positions accurately needs to learn representations that focus on the keypoint regions.
+We present a simple yet effective approach, named disentangled keypoint regression (DEKR). We adopt adaptive convolutions through pixel-wise spatial transformer to activate the pixels in the keypoint regions and accordingly learn representations from them. We use a multi-branch structure for separate regression: each branch learns a representation with dedicated adaptive convolutions and regresses one keypoint. The resulting disentangled representations are able to attend to the keypoint regions, respectively, and thus the keypoint regression is spatially more accurate. We empirically show that the proposed direct regression method outperforms keypoint detection and grouping methods and achieves superior bottom-up pose estimation results on two benchmark datasets, COCO and CrowdPose. The code and models are available at [this https URL](https://github.com/HRNet/DEKR).
+
+
+
+DEKR (CVPR'2021)
+ +```bibtex +@inproceedings{geng2021bottom, + title={Bottom-up human pose estimation via disentangled keypoint regression}, + author={Geng, Zigang and Sun, Ke and Xiao, Bin and Zhang, Zhaoxiang and Wang, Jingdong}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={14676--14686}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/dsnt.md b/docs/src/papers/algorithms/dsnt.md
new file mode 100644
index 0000000000000000000000000000000000000000..6a526429d6df44e24e7846edb5bf841b6b1e3363
--- /dev/null
+++ b/docs/src/papers/algorithms/dsnt.md
@@ -0,0 +1,29 @@
+# Numerical Coordinate Regression with Convolutional Neural Networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We study deep learning approaches to inferring numerical coordinates for points of interest in an input image. Existing convolutional neural network-based solutions to this problem either take a heatmap matching approach or regress to coordinates with a fully connected output layer. Neither of these approaches is ideal, since the former is not entirely differentiable, and the latter lacks inherent spatial generalization. We propose our differentiable spatial to numerical transform (DSNT) to fill this gap. The DSNT layer adds no trainable parameters, is fully differentiable, and exhibits good spatial generalization. Unlike heatmap matching, DSNT works well with low heatmap resolutions, so it can be dropped in as an output layer for a wide range of existing fully convolutional architectures. Consequently, DSNT offers a better trade-off between inference speed and prediction accuracy compared to existing techniques. When used to replace the popular heatmap matching approach used in almost all state-of-the-art methods for pose estimation, DSNT gives better prediction accuracy for all model architectures tested.
+
+
+
+DSNT (2018)
+ +```bibtex +@article{nibali2018numerical, + title={Numerical Coordinate Regression with Convolutional Neural Networks}, + author={Nibali, Aiden and He, Zhen and Morgan, Stuart and Prendergast, Luke}, + journal={arXiv preprint arXiv:1801.07372}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/dwpose.md b/docs/src/papers/algorithms/dwpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..4fd23effdcf544c4025c2097e0a79b15c2febef2
--- /dev/null
+++ b/docs/src/papers/algorithms/dwpose.md
@@ -0,0 +1,30 @@
+# Effective Whole-body Pose Estimation with Two-stages Distillation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Whole-body pose estimation localizes the human body, hand, face, and foot keypoints in an image. This task is challenging due to multi-scale body parts, fine-grained localization for low-resolution regions, and data scarcity. Meanwhile, applying a highly efficient and accurate pose estimator to widely human-centric understanding and generation tasks is urgent. In this work, we present a two-stage pose **D**istillation for **W**hole-body **P**ose estimators, named **DWPose**, to improve their effectiveness and efficiency. The first-stage distillation designs a weight-decay strategy while utilizing a teacher's intermediate feature and final logits with both visible and invisible keypoints to supervise the student from scratch. The second stage distills the student model itself to further improve performance. Different from the previous self-knowledge distillation, this stage finetunes the student's head with only 20% training time as a plug-and-play training strategy. For data limitations, we explore the UBody dataset that contains diverse facial expressions and hand gestures for real-life applications. Comprehensive experiments show the superiority of our proposed simple yet effective methods. We achieve new state-of-the-art performance on COCO-WholeBody, significantly boosting the whole-body AP of RTMPose-l from 64.8% to 66.5%, even surpassing RTMPose-x teacher with 65.3% AP. We release a series of models with different sizes, from tiny to large, for satisfying various downstream tasks. Our code and models are available at https://github.com/IDEA-Research/DWPose.
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@article{yang2023effective, + title={Effective Whole-body Pose Estimation with Two-stages Distillation}, + author={Yang, Zhendong and Zeng, Ailing and Yuan, Chun and Li, Yu}, + journal={arXiv preprint arXiv:2307.15880}, + year={2023} +} + +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/edpose.md b/docs/src/papers/algorithms/edpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..07acf2edb5b0e1d6a025a82740905d4ebc5f3705
--- /dev/null
+++ b/docs/src/papers/algorithms/edpose.md
@@ -0,0 +1,31 @@
+# Explicit Box Detection Unifies End-to-End Multi-Person Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+This paper presents a novel end-to-end framework with Explicit box Detection for multi-person Pose estimation, called ED-Pose, where it unifies the contextual learning between human-level (global) and keypoint-level (local) information. Different from previous one-stage methods, ED-Pose re-considers this task as two explicit box detection processes with a unified representation and regression supervision. First, we introduce a human detection decoder from encoded tokens to extract global features. It can provide a good initialization for the latter keypoint detection, making the training process converge fast. Second, to bring in contextual information near keypoints, we regard pose estimation as a keypoint box detection problem to learn both box positions and contents for each keypoint. A human-to-keypoint detection decoder adopts an interactive learning strategy between human and keypoint features to further enhance global and local feature aggregation. In general, ED-Pose is conceptually simple without post-processing and dense heatmap supervision. It demonstrates its effectiveness and efficiency compared with both two-stage and one-stage methods. Notably, explicit box detection boosts the pose estimation performance by 4.5 AP on COCO and 9.9 AP on CrowdPose. For the first time, as a fully end-to-end framework with a L1 regression loss, ED-Pose surpasses heatmap-based Top-down methods under the same backbone by 1.2 AP on COCO and achieves the state-of-the-art with 76.6 AP on CrowdPose without bells and whistles. Code is available at https://github.com/IDEA-Research/ED-Pose.
+
+
+
+ED-Pose (ICLR'2023)
+ +```bibtex +@inproceedings{ +yang2023explicit, +title={Explicit Box Detection Unifies End-to-End Multi-Person Pose Estimation}, +author={Jie Yang and Ailing Zeng and Shilong Liu and Feng Li and Ruimao Zhang and Lei Zhang}, +booktitle={International Conference on Learning Representations}, +year={2023}, +url={https://openreview.net/forum?id=s4WVupnJjmX} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/higherhrnet.md b/docs/src/papers/algorithms/higherhrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..c1d61c992a1f41e986d785560de0709407578dee
--- /dev/null
+++ b/docs/src/papers/algorithms/higherhrnet.md
@@ -0,0 +1,30 @@
+# HigherHRNet: Scale-Aware Representation Learning for Bottom-Up Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Bottom-up human pose estimation methods have difficulties in predicting the correct pose for small persons due to challenges in scale variation. In this paper, we present HigherHRNet: a novel bottom-up human pose estimation method for learning scale-aware representations using high-resolution feature pyramids. Equipped with multi-resolution supervision for training and multi-resolution aggregation for inference, the proposed approach is able to solve the scale variation challenge in bottom-up multi-person pose estimation and localize keypoints more precisely, especially for small person. The feature pyramid in HigherHRNet consists of feature map outputs from HRNet and upsampled higher-resolution outputs through a transposed convolution. HigherHRNet outperforms the previous best bottom-up method by 2.5% AP for medium person on COCO test-dev, showing its effectiveness in handling scale variation. Furthermore, HigherHRNet achieves new state-of-the-art result on COCO test-dev (70.5% AP) without using refinement or other post-processing techniques, surpassing all existing bottom-up methods. HigherHRNet even surpasses all top-down methods on CrowdPose test (67.6% AP), suggesting its robustness in crowded scene.
+
+
+
+HigherHRNet (CVPR'2020)
+ +```bibtex +@inproceedings{cheng2020higherhrnet, + title={HigherHRNet: Scale-Aware Representation Learning for Bottom-Up Human Pose Estimation}, + author={Cheng, Bowen and Xiao, Bin and Wang, Jingdong and Shi, Honghui and Huang, Thomas S and Zhang, Lei}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={5386--5395}, + year={2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/hmr.md b/docs/src/papers/algorithms/hmr.md
new file mode 100644
index 0000000000000000000000000000000000000000..5c90aa45218fcab1cd1f03d22af5c3c802b26be5
--- /dev/null
+++ b/docs/src/papers/algorithms/hmr.md
@@ -0,0 +1,32 @@
+# End-to-end Recovery of Human Shape and Pose
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We describe Human Mesh Recovery (HMR), an end-to-end framework for reconstructing a full 3D mesh of a human body from a single RGB image. In contrast to most current methods that compute 2D or 3D joint locations, we produce a richer and more useful mesh representation that is parameterized by shape and 3D joint angles. The main objective is to minimize the reprojection loss of keypoints, which allows our model to be trained using in-the-wild images that only have ground truth 2D annotations. However, the reprojection loss alone is highly underconstrained. In this work we address this problem by introducing an adversary trained to tell whether human body shape and pose are real or not using a large database of 3D human meshes. We show that HMR can be trained with and without using any paired 2D-to-3D supervision. We do not rely on intermediate 2D keypoint detections and infer 3D pose and shape parameters directly from image pixels. Our model runs in real-time given a bounding box containing the person. We demonstrate our approach on various images in-the-wild and out-perform previous optimization-based methods that output 3D meshes and show competitive results on tasks such as 3D joint location estimation and part segmentation.
+
+
+
+HMR (CVPR'2018)
+ +```bibtex +@inProceedings{kanazawaHMR18, + title={End-to-end Recovery of Human Shape and Pose}, + author = {Angjoo Kanazawa + and Michael J. Black + and David W. Jacobs + and Jitendra Malik}, + booktitle={Computer Vision and Pattern Recognition (CVPR)}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/hourglass.md b/docs/src/papers/algorithms/hourglass.md
new file mode 100644
index 0000000000000000000000000000000000000000..15f4d4d3c66bb59b413c8aaf3ace26fac93b9742
--- /dev/null
+++ b/docs/src/papers/algorithms/hourglass.md
@@ -0,0 +1,31 @@
+# Stacked hourglass networks for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+This work introduces a novel convolutional network architecture for the task of human pose estimation. Features are processed across all scales and consolidated to best capture the various spatial relationships associated with the body. We show how repeated bottom-up, top-down processing used in conjunction with intermediate supervision is critical to improving the performance of the network. We refer to the architecture as a "stacked hourglass" network based on the successive steps of pooling and upsampling that are done to produce a final set of predictions. State-of-the-art results are achieved on the FLIC and MPII benchmarks outcompeting all recent methods.
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/hrnet.md b/docs/src/papers/algorithms/hrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..05a46f543ef25de847c5fcb4704f56e5cea2bd42
--- /dev/null
+++ b/docs/src/papers/algorithms/hrnet.md
@@ -0,0 +1,32 @@
+# Deep high-resolution representation learning for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we are interested in the human pose estimation problem with a focus on learning reliable highresolution representations. Most existing methods recover high-resolution representations from low-resolution representations produced by a high-to-low resolution network. Instead, our proposed network maintains high-resolution representations through the whole process. We start from a high-resolution subnetwork as the first stage, gradually add high-to-low resolution subnetworks one by one to form more stages, and connect the mutliresolution subnetworks in parallel. We conduct repeated multi-scale fusions such that each of the high-to-low resolution representations receives information from other parallel representations over and over, leading to rich highresolution representations. As a result, the predicted keypoint heatmap is potentially more accurate and spatially more precise. We empirically demonstrate the effectiveness
+of our network through the superior pose estimation results over two benchmark datasets: the COCO keypoint detection
+dataset and the MPII Human Pose dataset. In addition, we show the superiority of our network in pose tracking on the PoseTrack dataset.
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/hrnetv2.md b/docs/src/papers/algorithms/hrnetv2.md
new file mode 100644
index 0000000000000000000000000000000000000000..f2ed2a9c0c8797a842e73c980e1868cdbfbf8cc8
--- /dev/null
+++ b/docs/src/papers/algorithms/hrnetv2.md
@@ -0,0 +1,31 @@
+# Deep high-resolution representation learning for visual recognition
+
+
+
+
+
+
+
+## Abstract
+
+
+
+High-resolution representations are essential for position-sensitive vision problems, such as human pose estimation, semantic segmentation, and object detection. Existing state-of-the-art frameworks first encode the input image as a low-resolution representation through a subnetwork that is formed by connecting high-to-low resolution convolutions in series (e.g., ResNet, VGGNet), and then recover the high-resolution representation from the encoded low-resolution representation. Instead, our proposed network, named as High-Resolution Network (HRNet), maintains high-resolution representations through the whole process. There are two key characteristics: (i) Connect the high-to-low resolution convolution streams in parallel and (ii) repeatedly exchange the information across resolutions. The benefit is that the resulting representation is semantically richer and spatially more precise. We show the superiority of the proposed HRNet in a wide range of applications, including human pose estimation, semantic segmentation, and object detection, suggesting that the HRNet is a stronger backbone for computer vision problems.
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/internet.md b/docs/src/papers/algorithms/internet.md
new file mode 100644
index 0000000000000000000000000000000000000000..e37ea72cea85da8b1fd6bf143b6958ff18972377
--- /dev/null
+++ b/docs/src/papers/algorithms/internet.md
@@ -0,0 +1,29 @@
+# InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Analysis of hand-hand interactions is a crucial step towards better understanding human behavior. However, most researches in 3D hand pose estimation have focused on the isolated single hand case. Therefore, we firstly propose (1) a large-scale dataset, InterHand2.6M, and (2) a baseline network, InterNet, for 3D interacting hand pose estimation from a single RGB image. The proposed InterHand2.6M consists of 2.6 M labeled single and interacting hand frames under various poses from multiple subjects. Our InterNet simultaneously performs 3D single and interacting hand pose estimation. In our experiments, we demonstrate big gains in 3D interacting hand pose estimation accuracy when leveraging the interacting hand data in InterHand2.6M. We also report the accuracy of InterNet on InterHand2.6M, which serves as a strong baseline for this new dataset. Finally, we show 3D interacting hand pose estimation results from general images.
+
+
+
+InterNet (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/ipr.md b/docs/src/papers/algorithms/ipr.md
new file mode 100644
index 0000000000000000000000000000000000000000..fca06b986a3d6b297a7a08b586946c343330787b
--- /dev/null
+++ b/docs/src/papers/algorithms/ipr.md
@@ -0,0 +1,30 @@
+# Integral Human Pose Regression
+
+
+
+
+
+
+
+## Abstract
+
+
+
+State-of-the-art human pose estimation methods are based on heat map representation. In spite of the good performance, the representation has a few issues in nature, such as not differentiable and quantization error. This work shows that a simple integral operation relates and unifies the heat map representation and joint regression, thus avoiding the above issues. It is differentiable, efficient, and compatible with any heat map based methods. Its effectiveness is convincingly validated via comprehensive ablation experiments under various settings, specifically on 3D pose estimation, for the first time.
+
+
+
+IPR (ECCV'2018)
+ +```bibtex +@inproceedings{sun2018integral, + title={Integral human pose regression}, + author={Sun, Xiao and Xiao, Bin and Wei, Fangyin and Liang, Shuang and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={529--545}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/litehrnet.md b/docs/src/papers/algorithms/litehrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..f446062caf6b5a88d1206c1cb412bf74006da6f2
--- /dev/null
+++ b/docs/src/papers/algorithms/litehrnet.md
@@ -0,0 +1,30 @@
+# Lite-HRNet: A Lightweight High-Resolution Network
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present an efficient high-resolution network, Lite-HRNet, for human pose estimation. We start by simply applying the efficient shuffle block in ShuffleNet to HRNet (high-resolution network), yielding stronger performance over popular lightweight networks, such as MobileNet, ShuffleNet, and Small HRNet.
+We find that the heavily-used pointwise (1x1) convolutions in shuffle blocks become the computational bottleneck. We introduce a lightweight unit, conditional channel weighting, to replace costly pointwise (1x1) convolutions in shuffle blocks. The complexity of channel weighting is linear w.r.t the number of channels and lower than the quadratic time complexity for pointwise convolutions. Our solution learns the weights from all the channels and over multiple resolutions that are readily available in the parallel branches in HRNet. It uses the weights as the bridge to exchange information across channels and resolutions, compensating the role played by the pointwise (1x1) convolution. Lite-HRNet demonstrates superior results on human pose estimation over popular lightweight networks. Moreover, Lite-HRNet can be easily applied to semantic segmentation task in the same lightweight manner.
+
+
+
+LiteHRNet (CVPR'2021)
+ +```bibtex +@inproceedings{Yulitehrnet21, + title={Lite-HRNet: A Lightweight High-Resolution Network}, + author={Yu, Changqian and Xiao, Bin and Gao, Changxin and Yuan, Lu and Zhang, Lei and Sang, Nong and Wang, Jingdong}, + booktitle={CVPR}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/motionbert.md b/docs/src/papers/algorithms/motionbert.md
new file mode 100644
index 0000000000000000000000000000000000000000..9ebe9ae0101623379e8c32708268673be161ef28
--- /dev/null
+++ b/docs/src/papers/algorithms/motionbert.md
@@ -0,0 +1,30 @@
+# MotionBERT: Unified Pretraining for Human Motion Analysis
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present MotionBERT, a unified pretraining framework, to tackle different sub-tasks of human motion analysis including 3D pose estimation, skeleton-based action recognition, and mesh recovery. The proposed framework is capable of utilizing all kinds of human motion data resources, including motion capture data and in-the-wild videos. During pretraining, the pretext task requires the motion encoder to recover the underlying 3D motion from noisy partial 2D observations. The pretrained motion representation thus acquires geometric, kinematic, and physical knowledge about human motion and therefore can be easily transferred to multiple downstream tasks. We implement the motion encoder with a novel Dual-stream Spatio-temporal Transformer (DSTformer) neural network. It could capture long-range spatio-temporal relationships among the skeletal joints comprehensively and adaptively, exemplified by the lowest 3D pose estimation error so far when trained from scratch. More importantly, the proposed framework achieves state-of-the-art performance on all three downstream tasks by simply finetuning the pretrained motion encoder with 1-2 linear layers, which demonstrates the versatility of the learned motion representations.
+
+
+
+MotionBERT (ICCV'2023)
+ +```bibtex + @misc{Zhu_Ma_Liu_Liu_Wu_Wang_2022, + title={Learning Human Motion Representations: A Unified Perspective}, + author={Zhu, Wentao and Ma, Xiaoxuan and Liu, Zhaoyang and Liu, Libin and Wu, Wayne and Wang, Yizhou}, + year={2022}, + month={Oct}, + language={en-US} + } +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/mspn.md b/docs/src/papers/algorithms/mspn.md
new file mode 100644
index 0000000000000000000000000000000000000000..1915cd3915fe6d0457ce6f8c02dbe4b306a6941b
--- /dev/null
+++ b/docs/src/papers/algorithms/mspn.md
@@ -0,0 +1,29 @@
+# Rethinking on multi-stage networks for human pose estimation
+
+
+
+
+
+
+## Abstract
+
+
+
+Existing pose estimation approaches fall into two categories: single-stage and multi-stage methods. While multi-stage methods are seemingly more suited for the task, their performance in current practice is not as good as single-stage methods. This work studies this issue. We argue that the current multi-stage methods' unsatisfactory performance comes from the insufficiency in various design choices. We propose several improvements, including the single-stage module design, cross stage feature aggregation, and coarse-to-fine supervision. The resulting method establishes the new state-of-the-art on both MS COCO and MPII Human Pose dataset, justifying the effectiveness of a multi-stage architecture. The source code is publicly available for further research.
+
+
+
+MSPN (ArXiv'2019)
+ +```bibtex +@article{li2019rethinking, + title={Rethinking on Multi-Stage Networks for Human Pose Estimation}, + author={Li, Wenbo and Wang, Zhicheng and Yin, Binyi and Peng, Qixiang and Du, Yuming and Xiao, Tianzi and Yu, Gang and Lu, Hongtao and Wei, Yichen and Sun, Jian}, + journal={arXiv preprint arXiv:1901.00148}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/posewarper.md b/docs/src/papers/algorithms/posewarper.md
new file mode 100644
index 0000000000000000000000000000000000000000..285a36c582bc831667216d24d5bc20480e66e933
--- /dev/null
+++ b/docs/src/papers/algorithms/posewarper.md
@@ -0,0 +1,29 @@
+# Learning Temporal Pose Estimation from Sparsely-Labeled Videos
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Modern approaches for multi-person pose estimation in video require large amounts of dense annotations. However, labeling every frame in a video is costly and labor intensive. To reduce the need for dense annotations, we propose a PoseWarper network that leverages training videos with sparse annotations (every k frames) to learn to perform dense temporal pose propagation and estimation. Given a pair of video frames---a labeled Frame A and an unlabeled Frame B---we train our model to predict human pose in Frame A using the features from Frame B by means of deformable convolutions to implicitly learn the pose warping between A and B. We demonstrate that we can leverage our trained PoseWarper for several applications. First, at inference time we can reverse the application direction of our network in order to propagate pose information from manually annotated frames to unlabeled frames. This makes it possible to generate pose annotations for the entire video given only a few manually-labeled frames. Compared to modern label propagation methods based on optical flow, our warping mechanism is much more compact (6M vs 39M parameters), and also more accurate (88.7% mAP vs 83.8% mAP). We also show that we can improve the accuracy of a pose estimator by training it on an augmented dataset obtained by adding our propagated poses to the original manual labels. Lastly, we can use our PoseWarper to aggregate temporal pose information from neighboring frames during inference. This allows our system to achieve state-of-the-art pose detection results on the PoseTrack2017 and PoseTrack2018 datasets.
+
+
+
+PoseWarper (NeurIPS'2019)
+ +```bibtex +@inproceedings{NIPS2019_gberta, +title = {Learning Temporal Pose Estimation from Sparsely Labeled Videos}, +author = {Bertasius, Gedas and Feichtenhofer, Christoph, and Tran, Du and Shi, Jianbo, and Torresani, Lorenzo}, +booktitle = {Advances in Neural Information Processing Systems 33}, +year = {2019}, +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/rle.md b/docs/src/papers/algorithms/rle.md
new file mode 100644
index 0000000000000000000000000000000000000000..cdc59d57eccc5d62bd27d8c20d03913e31e0b7c9
--- /dev/null
+++ b/docs/src/papers/algorithms/rle.md
@@ -0,0 +1,30 @@
+# Human pose regression with residual log-likelihood estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Heatmap-based methods dominate in the field of human pose estimation by modelling the output distribution through likelihood heatmaps. In contrast, regressionbased methods are more efficient but suffer from inferior performance. In this work, we explore maximum likelihood estimation (MLE) to develop an efficient and effective regression-based methods. From the perspective of MLE, adopting different regression losses is making different assumptions about the output density function. A density function closer to the true distribution leads to a better regression performance. In light of this, we propose a novel regression paradigm with Residual Log-likelihood Estimation (RLE) to capture the underlying output distribution. Concretely, RLE learns the change of the distribution instead of the unreferenced underlying distribution to facilitate the training process. With the proposed reparameterization design, our method is compatible with offthe-shelf flow models. The proposed method is effective, efficient and flexible. We show its potential in various human pose estimation tasks with comprehensive experiments. Compared to the conventional regression paradigm, regression with RLE bring 12.4 mAP improvement on MSCOCO without any test-time overhead. Moreover, for the first time, especially on multi-person pose estimation, our regression method is superior to the heatmap-based methods.
+
+
+
+RLE (ICCV'2021)
+ +```bibtex +@inproceedings{li2021human, + title={Human pose regression with residual log-likelihood estimation}, + author={Li, Jiefeng and Bian, Siyuan and Zeng, Ailing and Wang, Can and Pang, Bo and Liu, Wentao and Lu, Cewu}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11025--11034}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/rsn.md b/docs/src/papers/algorithms/rsn.md
new file mode 100644
index 0000000000000000000000000000000000000000..b1fb1ea9131d0b55828123211a8f8625c377f085
--- /dev/null
+++ b/docs/src/papers/algorithms/rsn.md
@@ -0,0 +1,31 @@
+# Learning delicate local representations for multi-person pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we propose a novel method called Residual Steps Network (RSN). RSN aggregates features with the same spatial size (Intra-level features) efficiently to obtain delicate local representations, which retain rich low-level spatial information and result in precise keypoint localization. Additionally, we observe the output features contribute differently to final performance. To tackle this problem, we propose an efficient attention mechanism - Pose Refine Machine (PRM) to make a trade-off between local and global representations in output features and further refine the keypoint locations. Our approach won the 1st place of COCO Keypoint Challenge 2019 and achieves state-of-the-art results on both COCO and MPII benchmarks, without using extra training data and pretrained model. Our single model achieves 78.6 on COCO test-dev, 93.0 on MPII test dataset. Ensembled models achieve 79.2 on COCO test-dev, 77.1 on COCO test-challenge dataset.
+
+
+
+RSN (ECCV'2020)
+ +```bibtex +@misc{cai2020learning, + title={Learning Delicate Local Representations for Multi-Person Pose Estimation}, + author={Yuanhao Cai and Zhicheng Wang and Zhengxiong Luo and Binyi Yin and Angang Du and Haoqian Wang and Xinyu Zhou and Erjin Zhou and Xiangyu Zhang and Jian Sun}, + year={2020}, + eprint={2003.04030}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/rtmo.md b/docs/src/papers/algorithms/rtmo.md
new file mode 100644
index 0000000000000000000000000000000000000000..dae0e4c576816c04fc7261f16ba7852486aae993
--- /dev/null
+++ b/docs/src/papers/algorithms/rtmo.md
@@ -0,0 +1,31 @@
+# RTMO: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Real-time multi-person pose estimation presents significant challenges in balancing speed and precision. While two-stage top-down methods slow down as the number of people in the image increases, existing one-stage methods often fail to simultaneously deliver high accuracy and real-time performance. This paper introduces RTMO, a one-stage pose estimation framework that seamlessly integrates coordinate classification by representing keypoints using dual 1-D heatmaps within the YOLO architecture, achieving accuracy comparable to top-down methods while maintaining high speed. We propose a dynamic coordinate classifier and a tailored loss function for heatmap learning, specifically designed to address the incompatibilities between coordinate classification and dense prediction models. RTMO outperforms state-of-the-art one-stage pose estimators, achieving 1.1% higher AP on COCO while operating about 9 times faster with the same backbone. Our largest model, RTMO-l, attains 74.8% AP on COCO val2017 and 141 FPS on a single V100 GPU, demonstrating its efficiency and accuracy.
+
+
+
+RTMO
+ +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
diff --git a/docs/src/papers/algorithms/rtmpose.md b/docs/src/papers/algorithms/rtmpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..04a3fb0a22f799112878b8e2d02044e3855e439a
--- /dev/null
+++ b/docs/src/papers/algorithms/rtmpose.md
@@ -0,0 +1,34 @@
+# RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose
+
+
+
++
+
+
+## Abstract
+
+
+
+Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency. In order to bridge this gap, we empirically explore key factors in pose estimation including paradigm, model architecture, training strategy, and deployment, and present a high-performance real-time multi-person pose estimation framework, RTMPose, based on MMPose. Our RTMPose-m achieves 75.8% AP on COCO with 90+ FPS on an Intel i7-11700 CPU and 430+ FPS on an NVIDIA GTX 1660 Ti GPU, and RTMPose-l achieves 67.0% AP on COCO-WholeBody with 130+ FPS. To further evaluate RTMPose’s capability in critical real-time applications, we also report the performance after deploying on the mobile device. Our RTMPoses achieves 72.2% AP on COCO with 70+ FPS on a Snapdragon 865 chip, outperforming existing open-source libraries. Code and models are released at https://github.com/open-mmlab/mmpose/tree/main/projects/rtmpose.
+
+
+
+RTMPose (arXiv'2023)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2303.07399, + doi = {10.48550/ARXIV.2303.07399}, + url = {https://arxiv.org/abs/2303.07399}, + author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai}, + keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences}, + title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose}, + publisher = {arXiv}, + year = {2023}, + copyright = {Creative Commons Attribution 4.0 International} +} + +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/scnet.md b/docs/src/papers/algorithms/scnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..043c144111789880f4f1d8b6ee5059518e185e8f
--- /dev/null
+++ b/docs/src/papers/algorithms/scnet.md
@@ -0,0 +1,30 @@
+# Improving Convolutional Networks with Self-Calibrated Convolutions
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Recent advances on CNNs are mostly devoted to designing more complex architectures to enhance their representation learning capacity. In this paper, we consider how to improve the basic convolutional feature transformation process of CNNs without tuning the model architectures. To this end, we present a novel self-calibrated convolutions that explicitly expand fields-of-view of each convolutional layers through internal communications and hence enrich the output features. In particular, unlike the standard convolutions that fuse spatial and channel-wise information using small kernels (e.g., 3x3), self-calibrated convolutions adaptively build long-range spatial and inter-channel dependencies around each spatial location through a novel self-calibration operation. Thus, it can help CNNs generate more discriminative representations by explicitly incorporating richer information. Our self-calibrated convolution design is simple and generic, and can be easily applied to augment standard convolutional layers without introducing extra parameters and complexity. Extensive experiments demonstrate that when applying self-calibrated convolutions into different backbones, our networks can significantly improve the baseline models in a variety of vision tasks, including image recognition, object detection, instance segmentation, and keypoint detection, with no need to change the network architectures. We hope this work could provide a promising way for future research in designing novel convolutional feature transformations for improving convolutional networks. Code is available on the project page.
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/simcc.md b/docs/src/papers/algorithms/simcc.md
new file mode 100644
index 0000000000000000000000000000000000000000..9a00d229f332e3e069cd4fc8aeca118405922578
--- /dev/null
+++ b/docs/src/papers/algorithms/simcc.md
@@ -0,0 +1,28 @@
+# SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+The 2D heatmap-based approaches have dominated Human Pose Estimation (HPE) for years due to high performance. However, the long-standing quantization error problem in the 2D heatmap-based methods leads to several well-known drawbacks: 1) The performance for the low-resolution inputs is limited; 2) To improve the feature map resolution for higher localization precision, multiple costly upsampling layers are required; 3) Extra post-processing is adopted to reduce the quantization error. To address these issues, we aim to explore a brand new scheme, called \\textit{SimCC}, which reformulates HPE as two classification tasks for horizontal and vertical coordinates. The proposed SimCC uniformly divides each pixel into several bins, thus achieving \\emph{sub-pixel} localization precision and low quantization error. Benefiting from that, SimCC can omit additional refinement post-processing and exclude upsampling layers under certain settings, resulting in a more simple and effective pipeline for HPE. Extensive experiments conducted over COCO, CrowdPose, and MPII datasets show that SimCC outperforms heatmap-based counterparts, especially in low-resolution settings by a large margin.
+
+
+
+SimCC (ECCV'2022)
+ +```bibtex +@misc{https://doi.org/10.48550/arxiv.2107.03332, + title={SimCC: a Simple Coordinate Classification Perspective for Human Pose Estimation}, + author={Li, Yanjie and Yang, Sen and Liu, Peidong and Zhang, Shoukui and Wang, Yunxiao and Wang, Zhicheng and Yang, Wankou and Xia, Shu-Tao}, + year={2021} +} +``` + +
+
+
diff --git a/docs/src/papers/algorithms/simplebaseline2d.md b/docs/src/papers/algorithms/simplebaseline2d.md
new file mode 100644
index 0000000000000000000000000000000000000000..3eca224da1727f10df0c5b11b63d961dc3740fab
--- /dev/null
+++ b/docs/src/papers/algorithms/simplebaseline2d.md
@@ -0,0 +1,30 @@
+# Simple baselines for human pose estimation and tracking
+
+
+
+
+
+
+
+## Abstract
+
+
+
+There has been significant progress on pose estimation and increasing interests on pose tracking in recent years. At the same time, the overall algorithm and system complexity increases as well, making the algorithm analysis and comparison more difficult. This work provides simple and effective baseline methods. They are helpful for inspiring and evaluating new ideas for the field. State-of-the-art results are achieved on challenging benchmarks.
+
+
+
+SimpleBaseline2D (ECCV'2018)
+ +```bibtex +@inproceedings{xiao2018simple, + title={Simple baselines for human pose estimation and tracking}, + author={Xiao, Bin and Wu, Haiping and Wei, Yichen}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={466--481}, + year={2018} +} +``` + +
+
+
diff --git a/docs/src/papers/algorithms/simplebaseline3d.md b/docs/src/papers/algorithms/simplebaseline3d.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee3c58368a5f71bda3199d385707336215086aaa
--- /dev/null
+++ b/docs/src/papers/algorithms/simplebaseline3d.md
@@ -0,0 +1,29 @@
+# A simple yet effective baseline for 3d human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Following the success of deep convolutional networks, state-of-the-art methods for 3d human pose estimation have focused on deep end-to-end systems that predict 3d joint locations given raw image pixels. Despite their excellent performance, it is often not easy to understand whether their remaining error stems from a limited 2d pose (visual) understanding, or from a failure to map 2d poses into 3-dimensional positions. With the goal of understanding these sources of error, we set out to build a system that given 2d joint locations predicts 3d positions. Much to our surprise, we have found that, with current technology, "lifting" ground truth 2d joint locations to 3d space is a task that can be solved with a remarkably low error rate: a relatively simple deep feed-forward network outperforms the best reported result by about 30% on Human3.6M, the largest publicly available 3d pose estimation benchmark. Furthermore, training our system on the output of an off-the-shelf state-of-the-art 2d detector (i.e., using images as input) yields state of the art results -- this includes an array of systems that have been trained end-to-end specifically for this task. Our results indicate that a large portion of the error of modern deep 3d pose estimation systems stems from their visual analysis, and suggests directions to further advance the state of the art in 3d human pose estimation.
+
+
+
+SimpleBaseline3D (ICCV'2017)
+ +```bibtex +@inproceedings{martinez_2017_3dbaseline, + title={A simple yet effective baseline for 3d human pose estimation}, + author={Martinez, Julieta and Hossain, Rayat and Romero, Javier and Little, James J.}, + booktitle={ICCV}, + year={2017} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/softwingloss.md b/docs/src/papers/algorithms/softwingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..524a6089ffee69e109a0a721fa14b820df88ae8b
--- /dev/null
+++ b/docs/src/papers/algorithms/softwingloss.md
@@ -0,0 +1,30 @@
+# Structure-Coherent Deep Feature Learning for Robust Face Alignment
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we propose a structure-coherent deep feature learning method for face alignment. Unlike most existing face alignment methods which overlook the facial structure cues, we explicitly exploit the relation among facial landmarks to make the detector robust to hard cases such as occlusion and large pose. Specifically, we leverage a landmark-graph relational network to enforce the structural relationships among landmarks. We consider the facial landmarks as structural graph nodes and carefully design the neighborhood to passing features among the most related nodes. Our method dynamically adapts the weights of node neighborhood to eliminate distracted information from noisy nodes, such as occluded landmark point. Moreover, different from most previous works which only tend to penalize the landmarks absolute position during the training, we propose a relative location loss to enhance the information of relative location of landmarks. This relative location supervision further regularizes the facial structure. Our approach considers the interactions among facial landmarks and can be easily implemented on top of any convolutional backbone to boost the performance. Extensive experiments on three popular benchmarks, including WFLW, COFW and 300W, demonstrate the effectiveness of the proposed method. In particular, due to explicit structure modeling, our approach is especially robust to challenging cases resulting in impressive low failure rate on COFW and WFLW datasets.
+
+
+
+SoftWingloss (TIP'2021)
+ +```bibtex +@article{lin2021structure, + title={Structure-Coherent Deep Feature Learning for Robust Face Alignment}, + author={Lin, Chunze and Zhu, Beier and Wang, Quan and Liao, Renjie and Qian, Chen and Lu, Jiwen and Zhou, Jie}, + journal={IEEE Transactions on Image Processing}, + year={2021}, + publisher={IEEE} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/udp.md b/docs/src/papers/algorithms/udp.md
new file mode 100644
index 0000000000000000000000000000000000000000..bb4acebfbc9474312e992a67e2a19ef2df12be85
--- /dev/null
+++ b/docs/src/papers/algorithms/udp.md
@@ -0,0 +1,30 @@
+# The Devil is in the Details: Delving into Unbiased Data Processing for Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Recently, the leading performance of human pose estimation is dominated by top-down methods. Being a fundamental component in training and inference, data processing has not been systematically considered in pose estimation community, to the best of our knowledge. In this paper, we focus on this problem and find that the devil of top-down pose estimator is in the biased data processing. Specifically, by investigating the standard data processing in state-of-the-art approaches mainly including data transformation and encoding-decoding, we find that the results obtained by common flipping strategy are unaligned with the original ones in inference. Moreover, there is statistical error in standard encoding-decoding during both training and inference. Two problems couple together and significantly degrade the pose estimation performance. Based on quantitative analyses, we then formulate a principled way to tackle this dilemma. Data is processed in continuous space based on unit length (the intervals between pixels) instead of in discrete space with pixel, and a combined classification and regression approach is adopted to perform encoding-decoding. The Unbiased Data Processing (UDP) for human pose estimation can be achieved by combining the two together. UDP not only boosts the performance of existing methods by a large margin but also plays a important role in result reproducing and future exploration. As a model-agnostic approach, UDP promotes SimpleBaseline-ResNet50-256x192 by 1.5 AP (70.2 to 71.7) and HRNet-W32-256x192 by 1.7 AP (73.5 to 75.2) on COCO test-dev set. The HRNet-W48-384x288 equipped with UDP achieves 76.5 AP and sets a new state-of-the-art for human pose estimation. The source code is publicly available for further research.
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/videopose3d.md b/docs/src/papers/algorithms/videopose3d.md
new file mode 100644
index 0000000000000000000000000000000000000000..f8647e0ee8a67666f352454aa40c256f07bd4c30
--- /dev/null
+++ b/docs/src/papers/algorithms/videopose3d.md
@@ -0,0 +1,30 @@
+# 3D human pose estimation in video with temporal convolutions and semi-supervised training
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this work, we demonstrate that 3D poses in video can be effectively estimated with a fully convolutional model based on dilated temporal convolutions over 2D keypoints. We also introduce back-projection, a simple and effective semi-supervised training method that leverages unlabeled video data. We start with predicted 2D keypoints for unlabeled video, then estimate 3D poses and finally back-project to the input 2D keypoints. In the supervised setting, our fully-convolutional model outperforms the previous best result from the literature by 6 mm mean per-joint position error on Human3.6M, corresponding to an error reduction of 11%, and the model also shows significant improvements on HumanEva-I. Moreover, experiments with back-projection show that it comfortably outperforms previous state-of-the-art results in semi-supervised settings where labeled data is scarce.
+
+
+
+VideoPose3D (CVPR'2019)
+ +```bibtex +@inproceedings{pavllo20193d, + title={3d human pose estimation in video with temporal convolutions and semi-supervised training}, + author={Pavllo, Dario and Feichtenhofer, Christoph and Grangier, David and Auli, Michael}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7753--7762}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/vipnas.md b/docs/src/papers/algorithms/vipnas.md
new file mode 100644
index 0000000000000000000000000000000000000000..5f52a8cac04cf48cb2e330afe176d835588034c6
--- /dev/null
+++ b/docs/src/papers/algorithms/vipnas.md
@@ -0,0 +1,29 @@
+# ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Human pose estimation has achieved significant progress in recent years. However, most of the recent methods focus on improving accuracy using complicated models and ignoring real-time efficiency. To achieve a better trade-off between accuracy and efficiency, we propose a novel neural architecture search (NAS) method, termed ViPNAS, to search networks in both spatial and temporal levels for fast online video pose estimation. In the spatial level, we carefully design the search space with five different dimensions including network depth, width, kernel size, group number, and attentions. In the temporal level, we search from a series of temporal feature fusions to optimize the total accuracy and speed across multiple video frames. To the best of our knowledge, we are the first to search for the temporal feature fusion and automatic computation allocation in videos. Extensive experiments demonstrate the effectiveness of our approach on the challenging COCO2017 and PoseTrack2018 datasets. Our discovered model family, S-ViPNAS and T-ViPNAS, achieve significantly higher inference speed (CPU real-time) without sacrificing the accuracy compared to the previous state-of-the-art methods.
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/vitpose.md b/docs/src/papers/algorithms/vitpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..dd218a5f982d7a1712d92c7ebe56548cb46fdf02
--- /dev/null
+++ b/docs/src/papers/algorithms/vitpose.md
@@ -0,0 +1,30 @@
+# ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Although no specific domain knowledge is considered in the design, plain vision transformers have shown excellent performance in visual recognition tasks. However, little effort has been made to reveal the potential of such simple structures for pose estimation tasks. In this paper, we show the surprisingly good capabilities of plain vision transformers for pose estimation from various aspects, namely simplicity in model structure, scalability in model size, flexibility in training paradigm, and transferability of knowledge between models, through a simple baseline model called ViTPose. Specifically, ViTPose employs plain and non-hierarchical vision transformers as backbones to extract features for a given person instance and a lightweight decoder for pose estimation. It can be scaled up from 100M to 1B parameters by taking the advantages of the scalable model capacity and high parallelism of transformers, setting a new Pareto front between throughput and performance. Besides, ViTPose is very flexible regarding the attention type, input resolution, pre-training and finetuning strategy, as well as dealing with multiple pose tasks. We also empirically demonstrate that the knowledge of large ViTPose models can be easily transferred to small ones via a simple knowledge token. Experimental results show that our basic ViTPose model outperforms representative methods on the challenging MS COCO Keypoint Detection benchmark, while the largest model sets a new state-of-the-art.
+
+
+
+ViTPose (NeurIPS'2022)
+ +```bibtex +@inproceedings{ + xu2022vitpose, + title={ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation}, + author={Yufei Xu and Jing Zhang and Qiming Zhang and Dacheng Tao}, + booktitle={Advances in Neural Information Processing Systems}, + year={2022}, +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/voxelpose.md b/docs/src/papers/algorithms/voxelpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..384f4ca1e57c1ad51ef79557f661b891f08173e7
--- /dev/null
+++ b/docs/src/papers/algorithms/voxelpose.md
@@ -0,0 +1,29 @@
+# VoxelPose: Towards Multi-Camera 3D Human Pose Estimation in Wild Environment
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present VoxelPose to estimate 3D poses of multiple people from multiple camera views. In contrast to the previous efforts which require to establish cross-view correspondence based on noisy and incomplete 2D pose estimates, VoxelPose directly operates in the 3D space therefore avoids making incorrect decisions in each camera view. To achieve this goal, features in all camera views are aggregated in the 3D voxel space and fed into Cuboid Proposal Network (CPN) to localize all people. Then we propose Pose Regression Network (PRN) to estimate a detailed 3D pose for each proposal. The approach is robust to occlusion which occurs frequently in practice. Without bells and whistles, it outperforms the previous methods on several public datasets.
+
+
+
+VoxelPose (ECCV'2020)
+ +```bibtex +@inproceedings{tumultipose, + title={VoxelPose: Towards Multi-Camera 3D Human Pose Estimation in Wild Environment}, + author={Tu, Hanyue and Wang, Chunyu and Zeng, Wenjun}, + booktitle={ECCV}, + year={2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/wingloss.md b/docs/src/papers/algorithms/wingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..2aaa05722eda24201cd35e1028349994d1f0fd6b
--- /dev/null
+++ b/docs/src/papers/algorithms/wingloss.md
@@ -0,0 +1,31 @@
+# Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present a new loss function, namely Wing loss, for robust facial landmark localisation with Convolutional Neural Networks (CNNs). We first compare and analyse different loss functions including L2, L1 and smooth L1. The analysis of these loss functions suggests that, for the training of a CNN-based localisation model, more attention should be paid to small and medium range errors. To this end, we design a piece-wise loss function. The new loss amplifies the impact of errors from the interval (-w, w) by switching from L1 loss to a modified logarithm function. To address the problem of under-representation of samples with large out-of-plane head rotations in the training set, we propose a simple but effective boosting strategy, referred to as pose-based data balancing. In particular, we deal with the data imbalance problem by duplicating the minority training samples and perturbing them by injecting random image rotation, bounding box translation and other data augmentation approaches. Last, the proposed approach is extended to create a two-stage framework for robust facial landmark localisation. The experimental results obtained on AFLW and 300W demonstrate the merits of the Wing loss function, and prove the superiority of the proposed method over the state-of-the-art approaches.
+
+
+
+Wingloss (CVPR'2018)
+ +```bibtex +@inproceedings{feng2018wing, + title={Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks}, + author={Feng, Zhen-Hua and Kittler, Josef and Awais, Muhammad and Huber, Patrik and Wu, Xiao-Jun}, + booktitle={Computer Vision and Pattern Recognition (CVPR), 2018 IEEE Conference on}, + year={2018}, + pages ={2235-2245}, + organization={IEEE} +} +``` + +
+ +
+
diff --git a/docs/src/papers/algorithms/yolopose.md b/docs/src/papers/algorithms/yolopose.md
new file mode 100644
index 0000000000000000000000000000000000000000..fe1f41a8048b21d911b17485e9dfe950612da453
--- /dev/null
+++ b/docs/src/papers/algorithms/yolopose.md
@@ -0,0 +1,30 @@
+# YOLO-Pose: Enhancing YOLO for Multi Person Pose Estimation Using Object Keypoint Similarity Loss
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We introduce YOLO-pose, a novel heatmap-free approach for joint detection, and 2D multi-person pose estimation in an image based on the popular YOLO object detection framework. Existing heatmap based two-stage approaches are sub-optimal as they are not end-to-end trainable and training relies on a surrogate L1 loss that is not equivalent to maximizing the evaluation metric, i.e. Object Keypoint Similarity (OKS). Our framework allows us to train the model end-to-end and optimize the OKS metric itself. The proposed model learns to jointly detect bounding boxes for multiple persons and their corresponding 2D poses in a single forward pass and thus bringing in the best of both top-down and bottom-up approaches. Proposed approach doesn't require the postprocessing of bottom-up approaches to group detected keypoints into a skeleton as each bounding box has an associated pose, resulting in an inherent grouping of the keypoints. Unlike top-down approaches, multiple forward passes are done away with since all persons are localized along with their pose in a single inference. YOLO-pose achieves new state-of-the-art results on COCO validation (90.2% AP50) and test-dev set (90.3% AP50), surpassing all existing bottom-up approaches in a single forward pass without flip test, multi-scale testing, or any other test time augmentation. All experiments and results reported in this paper are without any test time augmentation, unlike traditional approaches that use flip-test and multi-scale testing to boost performance.
+
+
+
+YOLO-Pose (CVPRW'2022)
+ +```bibtex +@inproceedings{maji2022yolo, + title={Yolo-pose: Enhancing yolo for multi person pose estimation using object keypoint similarity loss}, + author={Maji, Debapriya and Nagori, Soyeb and Mathew, Manu and Poddar, Deepak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={2637--2646}, + year={2022} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/alexnet.md b/docs/src/papers/backbones/alexnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..d1ea7531199bd126a2147f45f034abc883d688f7
--- /dev/null
+++ b/docs/src/papers/backbones/alexnet.md
@@ -0,0 +1,30 @@
+# Imagenet classification with deep convolutional neural networks
+
+
+
+
+
+
+## Abstract
+
+
+
+We trained a large, deep convolutional neural network to classify the 1.2 million high-resolution images in the ImageNet LSVRC-2010 contest into the 1000 different classes. On the test data, we achieved top-1 and top-5 error rates of 37.5% and 17.0% which is considerably better than the previous state-of-the-art. The neural network, which has 60 million parameters and 650,000 neurons, consists of five convolutional layers, some of which are followed by max-pooling layers, and three fully-connected layers with a final 1000-way softmax. To make training faster, we used non-saturating neurons and a very efficient GPU implementation of the convolution operation. To reduce overfitting in the fully-connected layers we employed a recently-developed regularization method called "dropout" that proved to be very effective. We also entered a variant of this model in the ILSVRC-2012 competition and achieved a winning top-5 test error rate of 15.3%, compared to 26.2% achieved by the second-best entry
+
+
+
+AlexNet (NeurIPS'2012)
+ +```bibtex +@inproceedings{krizhevsky2012imagenet, + title={Imagenet classification with deep convolutional neural networks}, + author={Krizhevsky, Alex and Sutskever, Ilya and Hinton, Geoffrey E}, + booktitle={Advances in neural information processing systems}, + pages={1097--1105}, + year={2012} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/cpm.md b/docs/src/papers/backbones/cpm.md
new file mode 100644
index 0000000000000000000000000000000000000000..fb5dbfacec909f86b58d1ed4b24e75cad039c49e
--- /dev/null
+++ b/docs/src/papers/backbones/cpm.md
@@ -0,0 +1,30 @@
+# Convolutional pose machines
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We introduce associative embedding, a novel method for supervising convolutional neural networks for the task of detection and grouping. A number of computer vision problems can be framed in this manner including multi-person pose estimation, instance segmentation, and multi-object tracking. Usually the grouping of detections is achieved with multi-stage pipelines, instead we propose an approach that teaches a network to simultaneously output detections and group assignments. This technique can be easily integrated into any state-of-the-art network architecture that produces pixel-wise predictions. We show how to apply this method to both multi-person pose estimation and instance segmentation and report state-of-the-art performance for multi-person pose on the MPII and MS-COCO datasets.
+
+
+
+CPM (CVPR'2016)
+ +```bibtex +@inproceedings{wei2016convolutional, + title={Convolutional pose machines}, + author={Wei, Shih-En and Ramakrishna, Varun and Kanade, Takeo and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={4724--4732}, + year={2016} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/higherhrnet.md b/docs/src/papers/backbones/higherhrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..c1d61c992a1f41e986d785560de0709407578dee
--- /dev/null
+++ b/docs/src/papers/backbones/higherhrnet.md
@@ -0,0 +1,30 @@
+# HigherHRNet: Scale-Aware Representation Learning for Bottom-Up Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Bottom-up human pose estimation methods have difficulties in predicting the correct pose for small persons due to challenges in scale variation. In this paper, we present HigherHRNet: a novel bottom-up human pose estimation method for learning scale-aware representations using high-resolution feature pyramids. Equipped with multi-resolution supervision for training and multi-resolution aggregation for inference, the proposed approach is able to solve the scale variation challenge in bottom-up multi-person pose estimation and localize keypoints more precisely, especially for small person. The feature pyramid in HigherHRNet consists of feature map outputs from HRNet and upsampled higher-resolution outputs through a transposed convolution. HigherHRNet outperforms the previous best bottom-up method by 2.5% AP for medium person on COCO test-dev, showing its effectiveness in handling scale variation. Furthermore, HigherHRNet achieves new state-of-the-art result on COCO test-dev (70.5% AP) without using refinement or other post-processing techniques, surpassing all existing bottom-up methods. HigherHRNet even surpasses all top-down methods on CrowdPose test (67.6% AP), suggesting its robustness in crowded scene.
+
+
+
+HigherHRNet (CVPR'2020)
+ +```bibtex +@inproceedings{cheng2020higherhrnet, + title={HigherHRNet: Scale-Aware Representation Learning for Bottom-Up Human Pose Estimation}, + author={Cheng, Bowen and Xiao, Bin and Wang, Jingdong and Shi, Honghui and Huang, Thomas S and Zhang, Lei}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={5386--5395}, + year={2020} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/hourglass.md b/docs/src/papers/backbones/hourglass.md
new file mode 100644
index 0000000000000000000000000000000000000000..15f4d4d3c66bb59b413c8aaf3ace26fac93b9742
--- /dev/null
+++ b/docs/src/papers/backbones/hourglass.md
@@ -0,0 +1,31 @@
+# Stacked hourglass networks for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+This work introduces a novel convolutional network architecture for the task of human pose estimation. Features are processed across all scales and consolidated to best capture the various spatial relationships associated with the body. We show how repeated bottom-up, top-down processing used in conjunction with intermediate supervision is critical to improving the performance of the network. We refer to the architecture as a "stacked hourglass" network based on the successive steps of pooling and upsampling that are done to produce a final set of predictions. State-of-the-art results are achieved on the FLIC and MPII benchmarks outcompeting all recent methods.
+
+
+
+Hourglass (ECCV'2016)
+ +```bibtex +@inproceedings{newell2016stacked, + title={Stacked hourglass networks for human pose estimation}, + author={Newell, Alejandro and Yang, Kaiyu and Deng, Jia}, + booktitle={European conference on computer vision}, + pages={483--499}, + year={2016}, + organization={Springer} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/hrformer.md b/docs/src/papers/backbones/hrformer.md
new file mode 100644
index 0000000000000000000000000000000000000000..dfa7a13f6b368b64669eb6acfa0d6d637fcb3496
--- /dev/null
+++ b/docs/src/papers/backbones/hrformer.md
@@ -0,0 +1,39 @@
+# HRFormer: High-Resolution Vision Transformer for Dense Predict
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present a High-Resolution Transformer (HRFormer) that learns high-resolution representations for dense
+prediction tasks, in contrast to the original Vision Transformer that produces low-resolution representations
+and has high memory and computational cost. We take advantage of the multi-resolution parallel design
+introduced in high-resolution convolutional networks (HRNet), along with local-window self-attention
+that performs self-attention over small non-overlapping image windows, for improving the memory and
+computation efficiency. In addition, we introduce a convolution into the FFN to exchange information
+across the disconnected image windows. We demonstrate the effectiveness of the HighResolution Transformer
+on both human pose estimation and semantic segmentation tasks, e.g., HRFormer outperforms Swin
+transformer by 1.3 AP on COCO pose estimation with 50% fewer parameters and 30% fewer FLOPs.
+Code is available at: https://github.com/HRNet/HRFormer
+
+
+
+HRFormer (NIPS'2021)
+ +```bibtex +@article{yuan2021hrformer, + title={HRFormer: High-Resolution Vision Transformer for Dense Predict}, + author={Yuan, Yuhui and Fu, Rao and Huang, Lang and Lin, Weihong and Zhang, Chao and Chen, Xilin and Wang, Jingdong}, + journal={Advances in Neural Information Processing Systems}, + volume={34}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/hrnet.md b/docs/src/papers/backbones/hrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..05a46f543ef25de847c5fcb4704f56e5cea2bd42
--- /dev/null
+++ b/docs/src/papers/backbones/hrnet.md
@@ -0,0 +1,32 @@
+# Deep high-resolution representation learning for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we are interested in the human pose estimation problem with a focus on learning reliable highresolution representations. Most existing methods recover high-resolution representations from low-resolution representations produced by a high-to-low resolution network. Instead, our proposed network maintains high-resolution representations through the whole process. We start from a high-resolution subnetwork as the first stage, gradually add high-to-low resolution subnetworks one by one to form more stages, and connect the mutliresolution subnetworks in parallel. We conduct repeated multi-scale fusions such that each of the high-to-low resolution representations receives information from other parallel representations over and over, leading to rich highresolution representations. As a result, the predicted keypoint heatmap is potentially more accurate and spatially more precise. We empirically demonstrate the effectiveness
+of our network through the superior pose estimation results over two benchmark datasets: the COCO keypoint detection
+dataset and the MPII Human Pose dataset. In addition, we show the superiority of our network in pose tracking on the PoseTrack dataset.
+
+
+
+HRNet (CVPR'2019)
+ +```bibtex +@inproceedings{sun2019deep, + title={Deep high-resolution representation learning for human pose estimation}, + author={Sun, Ke and Xiao, Bin and Liu, Dong and Wang, Jingdong}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={5693--5703}, + year={2019} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/hrnetv2.md b/docs/src/papers/backbones/hrnetv2.md
new file mode 100644
index 0000000000000000000000000000000000000000..f2ed2a9c0c8797a842e73c980e1868cdbfbf8cc8
--- /dev/null
+++ b/docs/src/papers/backbones/hrnetv2.md
@@ -0,0 +1,31 @@
+# Deep high-resolution representation learning for visual recognition
+
+
+
+
+
+
+
+## Abstract
+
+
+
+High-resolution representations are essential for position-sensitive vision problems, such as human pose estimation, semantic segmentation, and object detection. Existing state-of-the-art frameworks first encode the input image as a low-resolution representation through a subnetwork that is formed by connecting high-to-low resolution convolutions in series (e.g., ResNet, VGGNet), and then recover the high-resolution representation from the encoded low-resolution representation. Instead, our proposed network, named as High-Resolution Network (HRNet), maintains high-resolution representations through the whole process. There are two key characteristics: (i) Connect the high-to-low resolution convolution streams in parallel and (ii) repeatedly exchange the information across resolutions. The benefit is that the resulting representation is semantically richer and spatially more precise. We show the superiority of the proposed HRNet in a wide range of applications, including human pose estimation, semantic segmentation, and object detection, suggesting that the HRNet is a stronger backbone for computer vision problems.
+
+
+
+HRNetv2 (TPAMI'2019)
+ +```bibtex +@article{WangSCJDZLMTWLX19, + title={Deep High-Resolution Representation Learning for Visual Recognition}, + author={Jingdong Wang and Ke Sun and Tianheng Cheng and + Borui Jiang and Chaorui Deng and Yang Zhao and Dong Liu and Yadong Mu and + Mingkui Tan and Xinggang Wang and Wenyu Liu and Bin Xiao}, + journal={TPAMI}, + year={2019} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/litehrnet.md b/docs/src/papers/backbones/litehrnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..f446062caf6b5a88d1206c1cb412bf74006da6f2
--- /dev/null
+++ b/docs/src/papers/backbones/litehrnet.md
@@ -0,0 +1,30 @@
+# Lite-HRNet: A Lightweight High-Resolution Network
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present an efficient high-resolution network, Lite-HRNet, for human pose estimation. We start by simply applying the efficient shuffle block in ShuffleNet to HRNet (high-resolution network), yielding stronger performance over popular lightweight networks, such as MobileNet, ShuffleNet, and Small HRNet.
+We find that the heavily-used pointwise (1x1) convolutions in shuffle blocks become the computational bottleneck. We introduce a lightweight unit, conditional channel weighting, to replace costly pointwise (1x1) convolutions in shuffle blocks. The complexity of channel weighting is linear w.r.t the number of channels and lower than the quadratic time complexity for pointwise convolutions. Our solution learns the weights from all the channels and over multiple resolutions that are readily available in the parallel branches in HRNet. It uses the weights as the bridge to exchange information across channels and resolutions, compensating the role played by the pointwise (1x1) convolution. Lite-HRNet demonstrates superior results on human pose estimation over popular lightweight networks. Moreover, Lite-HRNet can be easily applied to semantic segmentation task in the same lightweight manner.
+
+
+
+LiteHRNet (CVPR'2021)
+ +```bibtex +@inproceedings{Yulitehrnet21, + title={Lite-HRNet: A Lightweight High-Resolution Network}, + author={Yu, Changqian and Xiao, Bin and Gao, Changxin and Yuan, Lu and Zhang, Lei and Sang, Nong and Wang, Jingdong}, + booktitle={CVPR}, + year={2021} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/mobilenetv2.md b/docs/src/papers/backbones/mobilenetv2.md
new file mode 100644
index 0000000000000000000000000000000000000000..9456520d46399060f00531a93e8612bff7625550
--- /dev/null
+++ b/docs/src/papers/backbones/mobilenetv2.md
@@ -0,0 +1,30 @@
+# Mobilenetv2: Inverted residuals and linear bottlenecks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper we describe a new mobile architecture, mbox{MobileNetV2}, that improves the state of the art performance of mobile models on multiple tasks and benchmarks as well as across a spectrum of different model sizes. We also describe efficient ways of applying these mobile models to object detection in a novel framework we call mbox{SSDLite}. Additionally, we demonstrate how to build mobile semantic segmentation models through a reduced form of mbox{DeepLabv3} which we call Mobile mbox{DeepLabv3}. is based on an inverted residual structure where the shortcut connections are between the thin bottleneck layers. The intermediate expansion layer uses lightweight depthwise convolutions to filter features as a source of non-linearity. Additionally, we find that it is important to remove non-linearities in the narrow layers in order to maintain representational power. We demonstrate that this improves performance and provide an intuition that led to this design. Finally, our approach allows decoupling of the input/output domains from the expressiveness of the transformation, which provides a convenient framework for further analysis. We measure our performance on mbox{ImageNet}~cite{Russakovsky:2015:ILS:2846547.2846559} classification, COCO object detection cite{COCO}, VOC image segmentation cite{PASCAL}. We evaluate the trade-offs between accuracy, and number of operations measured by multiply-adds (MAdd), as well as actual latency, and the number of parameters.
+
+
+
+MobilenetV2 (CVPR'2018)
+ +```bibtex +@inproceedings{sandler2018mobilenetv2, + title={Mobilenetv2: Inverted residuals and linear bottlenecks}, + author={Sandler, Mark and Howard, Andrew and Zhu, Menglong and Zhmoginov, Andrey and Chen, Liang-Chieh}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={4510--4520}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/mspn.md b/docs/src/papers/backbones/mspn.md
new file mode 100644
index 0000000000000000000000000000000000000000..1915cd3915fe6d0457ce6f8c02dbe4b306a6941b
--- /dev/null
+++ b/docs/src/papers/backbones/mspn.md
@@ -0,0 +1,29 @@
+# Rethinking on multi-stage networks for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Existing pose estimation approaches fall into two categories: single-stage and multi-stage methods. While multi-stage methods are seemingly more suited for the task, their performance in current practice is not as good as single-stage methods. This work studies this issue. We argue that the current multi-stage methods' unsatisfactory performance comes from the insufficiency in various design choices. We propose several improvements, including the single-stage module design, cross stage feature aggregation, and coarse-to-fine supervision. The resulting method establishes the new state-of-the-art on both MS COCO and MPII Human Pose dataset, justifying the effectiveness of a multi-stage architecture. The source code is publicly available for further research.
+
+
+
+MSPN (ArXiv'2019)
+ +```bibtex +@article{li2019rethinking, + title={Rethinking on Multi-Stage Networks for Human Pose Estimation}, + author={Li, Wenbo and Wang, Zhicheng and Yin, Binyi and Peng, Qixiang and Du, Yuming and Xiao, Tianzi and Yu, Gang and Lu, Hongtao and Wei, Yichen and Sun, Jian}, + journal={arXiv preprint arXiv:1901.00148}, + year={2019} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/pvt.md b/docs/src/papers/backbones/pvt.md
new file mode 100644
index 0000000000000000000000000000000000000000..303a1269128ca8419c6984f6f8d5579c9304e858
--- /dev/null
+++ b/docs/src/papers/backbones/pvt.md
@@ -0,0 +1,49 @@
+# Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Although using convolutional neural networks (CNNs) as backbones achieves great
+successes in computer vision, this work investigates a simple backbone network
+useful for many dense prediction tasks without convolutions. Unlike the
+recently-proposed Transformer model (e.g., ViT) that is specially designed for
+image classification, we propose Pyramid Vision Transformer~(PVT), which overcomes
+the difficulties of porting Transformer to various dense prediction tasks.
+PVT has several merits compared to prior arts. (1) Different from ViT that
+typically has low-resolution outputs and high computational and memory cost,
+PVT can be not only trained on dense partitions of the image to achieve high
+output resolution, which is important for dense predictions but also using a
+progressive shrinking pyramid to reduce computations of large feature maps.
+(2) PVT inherits the advantages from both CNN and Transformer, making it a
+unified backbone in various vision tasks without convolutions by simply replacing
+CNN backbones. (3) We validate PVT by conducting extensive experiments, showing
+that it boosts the performance of many downstream tasks, e.g., object detection,
+semantic, and instance segmentation. For example, with a comparable number of
+parameters, RetinaNet+PVT achieves 40.4 AP on the COCO dataset, surpassing
+RetinNet+ResNet50 (36.3 AP) by 4.1 absolute AP. We hope PVT could serve as an
+alternative and useful backbone for pixel-level predictions and facilitate future
+researches. Code is available at https://github.com/whai362/PVT .
+
+
+
+PVT (ICCV'2021)
+ +```bibtex +@inproceedings{wang2021pyramid, + title={Pyramid vision transformer: A versatile backbone for dense prediction without convolutions}, + author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={568--578}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/pvtv2.md b/docs/src/papers/backbones/pvtv2.md
new file mode 100644
index 0000000000000000000000000000000000000000..43657d8fb9935294721d08cce817274c112894f8
--- /dev/null
+++ b/docs/src/papers/backbones/pvtv2.md
@@ -0,0 +1,35 @@
+# PVTv2: Improved Baselines with Pyramid Vision Transformer
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Transformer recently has presented encouraging progress in computer vision.
+In this work, we present new baselines by improving the original Pyramid
+Vision Transformer (PVTv1) by adding three designs, including (1) linear
+complexity attention layer, (2) overlapping patch embedding, and (3)
+convolutional feed-forward network. With these modifications, PVTv2 reduces
+the computational complexity of PVTv1 to linear and achieves significant
+improvements on fundamental vision tasks such as classification, detection,
+and segmentation. Notably, the proposed PVTv2 achieves comparable or better
+performances than recent works such as Swin Transformer. We hope this work
+will facilitate state-of-the-art Transformer researches in computer vision.
+Code is available at https://github.com/whai362/PVT .
diff --git a/docs/src/papers/backbones/resnest.md b/docs/src/papers/backbones/resnest.md
new file mode 100644
index 0000000000000000000000000000000000000000..748c94737a4ebc96ec50a5520e1fa5c547651d42
--- /dev/null
+++ b/docs/src/papers/backbones/resnest.md
@@ -0,0 +1,29 @@
+# ResNeSt: Split-Attention Networks
+
+
+
+PVTV2 (CVMJ'2022)
+ +```bibtex +@article{wang2022pvt, + title={PVT v2: Improved baselines with Pyramid Vision Transformer}, + author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling}, + journal={Computational Visual Media}, + pages={1--10}, + year={2022}, + publisher={Springer} +} +``` + +
+
+
+## Abstract
+
+
+
+It is well known that featuremap attention and multi-path representation are important for visual recognition. In this paper, we present a modularized architecture, which applies the channel-wise attention on different network branches to leverage their success in capturing cross-feature interactions and learning diverse representations. Our design results in a simple and unified computation block, which can be parameterized using only a few variables. Our model, named ResNeSt, outperforms EfficientNet in accuracy and latency trade-off on image classification. In addition, ResNeSt has achieved superior transfer learning results on several public benchmarks serving as the backbone, and has been adopted by the winning entries of COCO-LVIS challenge. The source code for complete system and pretrained models are publicly available.
+
+
+
+ResNeSt (ArXiv'2020)
+ +```bibtex +@article{zhang2020resnest, + title={ResNeSt: Split-Attention Networks}, + author={Zhang, Hang and Wu, Chongruo and Zhang, Zhongyue and Zhu, Yi and Zhang, Zhi and Lin, Haibin and Sun, Yue and He, Tong and Muller, Jonas and Manmatha, R. and Li, Mu and Smola, Alexander}, + journal={arXiv preprint arXiv:2004.08955}, + year={2020} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/resnet.md b/docs/src/papers/backbones/resnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..86b91ffc38623af6f4fd8614371cb3f3db2d6fe2
--- /dev/null
+++ b/docs/src/papers/backbones/resnet.md
@@ -0,0 +1,32 @@
+# Deep residual learning for image recognition
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Deeper neural networks are more difficult to train. We present a residual learning framework to ease the training of networks that are substantially deeper than those used previously. We explicitly reformulate the layers as learning residual functions with reference to the layer inputs, instead of learning unreferenced functions. We provide comprehensive empirical evidence showing that these residual networks are easier to optimize, and can gain accuracy from
+considerably increased depth. On the ImageNet dataset we evaluate residual nets with a depth of up to 152 layers—8× deeper than VGG nets but still having lower complexity. An ensemble of these residual nets achieves 3.57% error on the ImageNet test set. This result won the 1st place on the ILSVRC 2015 classification task. We also present analysis on CIFAR-10 with 100 and 1000 layers. The depth of representations is of central importance for many visual recognition tasks. Solely due to our extremely deep representations, we obtain a 28% relative improvement on the COCO object detection dataset. Deep residual nets are foundations of our submissions to ILSVRC
+& COCO 2015 competitions1 , where we also won the 1st places on the tasks of ImageNet detection, ImageNet localization, COCO detection, and COCO segmentation.
+
+
+
+ResNet (CVPR'2016)
+ +```bibtex +@inproceedings{he2016deep, + title={Deep residual learning for image recognition}, + author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={770--778}, + year={2016} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/resnetv1d.md b/docs/src/papers/backbones/resnetv1d.md
new file mode 100644
index 0000000000000000000000000000000000000000..ebde55454e4750dfce018e1f13cb7a464380b5ae
--- /dev/null
+++ b/docs/src/papers/backbones/resnetv1d.md
@@ -0,0 +1,31 @@
+# Bag of tricks for image classification with convolutional neural networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Much of the recent progress made in image classification research can be credited to training procedure refinements, such as changes in data augmentations and optimization methods. In the literature, however, most refinements are either briefly mentioned as implementation details or only visible in source code. In this paper, we will examine a collection of such refinements and empirically evaluate their impact on the final model accuracy through ablation study. We will show that, by combining these refinements together, we are able to improve various CNN models significantly. For example, we raise ResNet-50’s top-1 validation accuracy from 75.3% to 79.29% on ImageNet. We will also demonstrate that improvement on image classification accuracy leads to better transfer learning performance in other application domains such as object detection and semantic
+segmentation.
+
+
+
+ResNetV1D (CVPR'2019)
+ +```bibtex +@inproceedings{he2019bag, + title={Bag of tricks for image classification with convolutional neural networks}, + author={He, Tong and Zhang, Zhi and Zhang, Hang and Zhang, Zhongyue and Xie, Junyuan and Li, Mu}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={558--567}, + year={2019} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/resnext.md b/docs/src/papers/backbones/resnext.md
new file mode 100644
index 0000000000000000000000000000000000000000..9803ee9bcd578c6a34369750a1b39e5ffa497797
--- /dev/null
+++ b/docs/src/papers/backbones/resnext.md
@@ -0,0 +1,30 @@
+# Aggregated residual transformations for deep neural networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present a simple, highly modularized network architecture for image classification. Our network is constructed by repeating a building block that aggregates a set of transformations with the same topology. Our simple design results in a homogeneous, multi-branch architecture that has only a few hyper-parameters to set. This strategy exposes a new dimension, which we call "cardinality" (the size of the set of transformations), as an essential factor in addition to the dimensions of depth and width. On the ImageNet-1K dataset, we empirically show that even under the restricted condition of maintaining complexity, increasing cardinality is able to improve classification accuracy. Moreover, increasing cardinality is more effective than going deeper or wider when we increase the capacity. Our models, named ResNeXt, are the foundations of our entry to the ILSVRC 2016 classification task in which we secured 2nd place. We further investigate ResNeXt on an ImageNet-5K set and the COCO detection set, also showing better results than its ResNet counterpart. The code and models are publicly available online.
+
+
+
+ResNext (CVPR'2017)
+ +```bibtex +@inproceedings{xie2017aggregated, + title={Aggregated residual transformations for deep neural networks}, + author={Xie, Saining and Girshick, Ross and Doll{\'a}r, Piotr and Tu, Zhuowen and He, Kaiming}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={1492--1500}, + year={2017} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/rsn.md b/docs/src/papers/backbones/rsn.md
new file mode 100644
index 0000000000000000000000000000000000000000..b1fb1ea9131d0b55828123211a8f8625c377f085
--- /dev/null
+++ b/docs/src/papers/backbones/rsn.md
@@ -0,0 +1,31 @@
+# Learning delicate local representations for multi-person pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we propose a novel method called Residual Steps Network (RSN). RSN aggregates features with the same spatial size (Intra-level features) efficiently to obtain delicate local representations, which retain rich low-level spatial information and result in precise keypoint localization. Additionally, we observe the output features contribute differently to final performance. To tackle this problem, we propose an efficient attention mechanism - Pose Refine Machine (PRM) to make a trade-off between local and global representations in output features and further refine the keypoint locations. Our approach won the 1st place of COCO Keypoint Challenge 2019 and achieves state-of-the-art results on both COCO and MPII benchmarks, without using extra training data and pretrained model. Our single model achieves 78.6 on COCO test-dev, 93.0 on MPII test dataset. Ensembled models achieve 79.2 on COCO test-dev, 77.1 on COCO test-challenge dataset.
+
+
+
+RSN (ECCV'2020)
+ +```bibtex +@misc{cai2020learning, + title={Learning Delicate Local Representations for Multi-Person Pose Estimation}, + author={Yuanhao Cai and Zhicheng Wang and Zhengxiong Luo and Binyi Yin and Angang Du and Haoqian Wang and Xinyu Zhou and Erjin Zhou and Xiangyu Zhang and Jian Sun}, + year={2020}, + eprint={2003.04030}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/scnet.md b/docs/src/papers/backbones/scnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..043c144111789880f4f1d8b6ee5059518e185e8f
--- /dev/null
+++ b/docs/src/papers/backbones/scnet.md
@@ -0,0 +1,30 @@
+# Improving Convolutional Networks with Self-Calibrated Convolutions
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Recent advances on CNNs are mostly devoted to designing more complex architectures to enhance their representation learning capacity. In this paper, we consider how to improve the basic convolutional feature transformation process of CNNs without tuning the model architectures. To this end, we present a novel self-calibrated convolutions that explicitly expand fields-of-view of each convolutional layers through internal communications and hence enrich the output features. In particular, unlike the standard convolutions that fuse spatial and channel-wise information using small kernels (e.g., 3x3), self-calibrated convolutions adaptively build long-range spatial and inter-channel dependencies around each spatial location through a novel self-calibration operation. Thus, it can help CNNs generate more discriminative representations by explicitly incorporating richer information. Our self-calibrated convolution design is simple and generic, and can be easily applied to augment standard convolutional layers without introducing extra parameters and complexity. Extensive experiments demonstrate that when applying self-calibrated convolutions into different backbones, our networks can significantly improve the baseline models in a variety of vision tasks, including image recognition, object detection, instance segmentation, and keypoint detection, with no need to change the network architectures. We hope this work could provide a promising way for future research in designing novel convolutional feature transformations for improving convolutional networks. Code is available on the project page.
+
+
+
+SCNet (CVPR'2020)
+ +```bibtex +@inproceedings{liu2020improving, + title={Improving Convolutional Networks with Self-Calibrated Convolutions}, + author={Liu, Jiang-Jiang and Hou, Qibin and Cheng, Ming-Ming and Wang, Changhu and Feng, Jiashi}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={10096--10105}, + year={2020} +} +``` + +
+
+
diff --git a/docs/src/papers/backbones/seresnet.md b/docs/src/papers/backbones/seresnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..32295324d3858e5bf65f4c6d856a0cd613184516
--- /dev/null
+++ b/docs/src/papers/backbones/seresnet.md
@@ -0,0 +1,30 @@
+# Squeeze-and-excitation networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Convolutional neural networks are built upon the convolution operation, which extracts informative features by fusing spatial and channel-wise information together within local receptive fields. In order to boost the representational power of a network, several recent approaches have shown the benefit of enhancing spatial encoding. In this work, we focus on the channel relationship and propose a novel architectural unit, which we term the "Squeeze-and-Excitation" (SE) block, that adaptively recalibrates channel-wise feature responses by explicitly modelling interdependencies between channels. We demonstrate that by stacking these blocks together, we can construct SENet architectures that generalise extremely well across challenging datasets. Crucially, we find that SE blocks produce significant performance improvements for existing state-of-the-art deep architectures at minimal additional computational cost. SENets formed the foundation of our ILSVRC 2017 classification submission which won first place and significantly reduced the top-5 error to 2.251%, achieving a ∼25% relative improvement over the winning entry of 2016. Code and models are available at https: //github.com/hujie-frank/SENet.
+
+
+
+SEResNet (CVPR'2018)
+ +```bibtex +@inproceedings{hu2018squeeze, + title={Squeeze-and-excitation networks}, + author={Hu, Jie and Shen, Li and Sun, Gang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={7132--7141}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/shufflenetv1.md b/docs/src/papers/backbones/shufflenetv1.md
new file mode 100644
index 0000000000000000000000000000000000000000..a314c9b709ca8aaf6f7c47138fe3eee2aabd4bb9
--- /dev/null
+++ b/docs/src/papers/backbones/shufflenetv1.md
@@ -0,0 +1,30 @@
+# Shufflenet: An extremely efficient convolutional neural network for mobile devices
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We introduce an extremely computation-efficient CNN architecture named ShuffleNet, which is designed specially for mobile devices with very limited computing power (e.g., 10-150 MFLOPs). The new architecture utilizes two new operations, pointwise group convolution and channel shuffle, to greatly reduce computation cost while maintaining accuracy. Experiments on ImageNet classification and MS COCO object detection demonstrate the superior performance of ShuffleNet over other structures, e.g. lower top-1 error (absolute 7.8%) than recent MobileNet~cite{howard2017mobilenets} on ImageNet classification task, under the computation budget of 40 MFLOPs. On an ARM-based mobile device, ShuffleNet achieves $sim$13$ imes$ actual speedup over AlexNet while maintaining comparable accuracy.
+
+
+
+ShufflenetV1 (CVPR'2018)
+ +```bibtex +@inproceedings{zhang2018shufflenet, + title={Shufflenet: An extremely efficient convolutional neural network for mobile devices}, + author={Zhang, Xiangyu and Zhou, Xinyu and Lin, Mengxiao and Sun, Jian}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={6848--6856}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/shufflenetv2.md b/docs/src/papers/backbones/shufflenetv2.md
new file mode 100644
index 0000000000000000000000000000000000000000..834ee38bc0deb814d7c3f911c919a8696764b415
--- /dev/null
+++ b/docs/src/papers/backbones/shufflenetv2.md
@@ -0,0 +1,30 @@
+# Shufflenet v2: Practical guidelines for efficient cnn architecture design
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Current network architecture design is mostly guided by the indirect metric of computation complexity, i.e., FLOPs. However, the direct metric, such as speed, also depends on the other factors such as memory access cost and platform characterics. Taking these factors into account, this work proposes practical guidelines for efficient network de- sign. Accordingly, a new architecture called ShuffleNet V2 is presented. Comprehensive experiments verify that it is the state-of-the-art in both speed and accuracy.
+
+
+
+ShufflenetV2 (ECCV'2018)
+ +```bibtex +@inproceedings{ma2018shufflenet, + title={Shufflenet v2: Practical guidelines for efficient cnn architecture design}, + author={Ma, Ningning and Zhang, Xiangyu and Zheng, Hai-Tao and Sun, Jian}, + booktitle={Proceedings of the European conference on computer vision (ECCV)}, + pages={116--131}, + year={2018} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/swin.md b/docs/src/papers/backbones/swin.md
new file mode 100644
index 0000000000000000000000000000000000000000..a2c04c0cf208f36ffdb3467828a929d88c48837b
--- /dev/null
+++ b/docs/src/papers/backbones/swin.md
@@ -0,0 +1,30 @@
+# Swin transformer: Hierarchical vision transformer using shifted windows
+
+
+
+
+
+
+
+## Abstract
+
+
+
+This paper presents a new vision Transformer, called Swin Transformer, that capably serves as a general-purpose backbone for computer vision. Challenges in adapting Transformer from language to vision arise from differences between the two domains, such as large variations in the scale of visual entities and the high resolution of pixels in images compared to words in text. To address these differences, we propose a hierarchical Transformer whose representation is computed with Shifted windows. The shifted windowing scheme brings greater efficiency by limiting self-attention computation to non-overlapping local windows while also allowing for cross-window connection. This hierarchical architecture has the flexibility to model at various scales and has linear computational complexity with respect to image size. These qualities of Swin Transformer make it compatible with a broad range of vision tasks, including image classification (87.3 top-1 accuracy on ImageNet-1K) and dense prediction tasks such as object detection (58.7 box AP and 51.1 mask AP on COCO testdev) and semantic segmentation (53.5 mIoU on ADE20K val). Its performance surpasses the previous state-of-theart by a large margin of +2.7 box AP and +2.6 mask AP on COCO, and +3.2 mIoU on ADE20K, demonstrating the potential of Transformer-based models as vision backbones. The hierarchical design and the shifted window approach also prove beneficial for all-MLP architectures.
+
+
+
+Swin (ICCV'2021)
+ +```bibtex +@inproceedings{liu2021swin, + title={Swin transformer: Hierarchical vision transformer using shifted windows}, + author={Liu, Ze and Lin, Yutong and Cao, Yue and Hu, Han and Wei, Yixuan and Zhang, Zheng and Lin, Stephen and Guo, Baining}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={10012--10022}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/vgg.md b/docs/src/papers/backbones/vgg.md
new file mode 100644
index 0000000000000000000000000000000000000000..3a92a46b986a9a8907a74333bcee6acff6d01891
--- /dev/null
+++ b/docs/src/papers/backbones/vgg.md
@@ -0,0 +1,29 @@
+# Very Deep Convolutional Networks for Large-Scale Image Recognition
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this work we investigate the effect of the convolutional network depth on its accuracy in the large-scale image recognition setting. Our main contribution is a thorough evaluation of networks of increasing depth using an architecture with very small (3x3) convolution filters, which shows that a significant improvement on the prior-art configurations can be achieved by pushing the depth to 16-19 weight layers. These findings were the basis of our ImageNet Challenge 2014 submission, where our team secured the first and the second places in the localisation and classification tracks respectively. We also show that our representations generalise well to other datasets, where they achieve state-of-the-art results. We have made our two best-performing ConvNet models publicly available to facilitate further research on the use of deep visual representations in computer vision.
+
+
+
+VGG (ICLR'2015)
+ +```bibtex +@article{simonyan2014very, + title={Very deep convolutional networks for large-scale image recognition}, + author={Simonyan, Karen and Zisserman, Andrew}, + journal={arXiv preprint arXiv:1409.1556}, + year={2014} +} +``` + +
+ +
+
diff --git a/docs/src/papers/backbones/vipnas.md b/docs/src/papers/backbones/vipnas.md
new file mode 100644
index 0000000000000000000000000000000000000000..5f52a8cac04cf48cb2e330afe176d835588034c6
--- /dev/null
+++ b/docs/src/papers/backbones/vipnas.md
@@ -0,0 +1,29 @@
+# ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Human pose estimation has achieved significant progress in recent years. However, most of the recent methods focus on improving accuracy using complicated models and ignoring real-time efficiency. To achieve a better trade-off between accuracy and efficiency, we propose a novel neural architecture search (NAS) method, termed ViPNAS, to search networks in both spatial and temporal levels for fast online video pose estimation. In the spatial level, we carefully design the search space with five different dimensions including network depth, width, kernel size, group number, and attentions. In the temporal level, we search from a series of temporal feature fusions to optimize the total accuracy and speed across multiple video frames. To the best of our knowledge, we are the first to search for the temporal feature fusion and automatic computation allocation in videos. Extensive experiments demonstrate the effectiveness of our approach on the challenging COCO2017 and PoseTrack2018 datasets. Our discovered model family, S-ViPNAS and T-ViPNAS, achieve significantly higher inference speed (CPU real-time) without sacrificing the accuracy compared to the previous state-of-the-art methods.
+
+
+
+ViPNAS (CVPR'2021)
+ +```bibtex +@article{xu2021vipnas, + title={ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search}, + author={Xu, Lumin and Guan, Yingda and Jin, Sheng and Liu, Wentao and Qian, Chen and Luo, Ping and Ouyang, Wanli and Wang, Xiaogang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + year={2021} +} +``` + +
+
+
diff --git a/docs/src/papers/datasets/300w.md b/docs/src/papers/datasets/300w.md
new file mode 100644
index 0000000000000000000000000000000000000000..7af778ee6d821ec5817ae55e1729ebef43867668
--- /dev/null
+++ b/docs/src/papers/datasets/300w.md
@@ -0,0 +1,20 @@
+# 300 faces in-the-wild challenge: Database and results
+
+
+
+
+
+
diff --git a/docs/src/papers/datasets/300wlp.md b/docs/src/papers/datasets/300wlp.md
new file mode 100644
index 0000000000000000000000000000000000000000..e96776c57c110d41c6c7181f1542832a434dbef3
--- /dev/null
+++ b/docs/src/papers/datasets/300wlp.md
@@ -0,0 +1,18 @@
+# **Face Alignment Across Large Poses: A 3D Solution**
+
+
+
+300W (IMAVIS'2016)
+ +```bibtex +@article{sagonas2016300, + title={300 faces in-the-wild challenge: Database and results}, + author={Sagonas, Christos and Antonakos, Epameinondas and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja}, + journal={Image and vision computing}, + volume={47}, + pages={3--18}, + year={2016}, + publisher={Elsevier} +} +``` + +
+
diff --git a/docs/src/papers/datasets/aflw.md b/docs/src/papers/datasets/aflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..f04f265c836a3fcccbd4869d22291db3235c672d
--- /dev/null
+++ b/docs/src/papers/datasets/aflw.md
@@ -0,0 +1,19 @@
+# Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization
+
+
+
+300WLP (IEEE'2017)
+ +```bibtex +@article{zhu2017face, + title={Face alignment in full pose range: A 3d total solution}, + author={Zhu, Xiangyu and Liu, Xiaoming and Lei, Zhen and Li, Stan Z}, + journal={IEEE transactions on pattern analysis and machine intelligence}, + year={2017}, + publisher={IEEE} +} +``` + +
+
diff --git a/docs/src/papers/datasets/aic.md b/docs/src/papers/datasets/aic.md
new file mode 100644
index 0000000000000000000000000000000000000000..5054609a394ac3fe6f621caa86f60d7e0186c79c
--- /dev/null
+++ b/docs/src/papers/datasets/aic.md
@@ -0,0 +1,17 @@
+# Ai challenger: A large-scale dataset for going deeper in image understanding
+
+
+
+AFLW (ICCVW'2011)
+ +```bibtex +@inproceedings{koestinger2011annotated, + title={Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization}, + author={Koestinger, Martin and Wohlhart, Paul and Roth, Peter M and Bischof, Horst}, + booktitle={2011 IEEE international conference on computer vision workshops (ICCV workshops)}, + pages={2144--2151}, + year={2011}, + organization={IEEE} +} +``` + +
+
diff --git a/docs/src/papers/datasets/animalkingdom.md b/docs/src/papers/datasets/animalkingdom.md
new file mode 100644
index 0000000000000000000000000000000000000000..64b5fe375a063bfb6803e5a2a280b55dc4ac4a55
--- /dev/null
+++ b/docs/src/papers/datasets/animalkingdom.md
@@ -0,0 +1,19 @@
+# Animal Kingdom: A Large and Diverse Dataset for Animal Behavior Understanding
+
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
diff --git a/docs/src/papers/datasets/animalpose.md b/docs/src/papers/datasets/animalpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..58303b8ee27c58d3e262359f25578b10657a2729
--- /dev/null
+++ b/docs/src/papers/datasets/animalpose.md
@@ -0,0 +1,18 @@
+# Cross-Domain Adaptation for Animal Pose Estimation
+
+
+
+Animal Kingdom (CVPR'2022)
+ +```bibtex +@InProceedings{Ng_2022_CVPR, + author = {Ng, Xun Long and Ong, Kian Eng and Zheng, Qichen and Ni, Yun and Yeo, Si Yong and Liu, Jun}, + title = {Animal Kingdom: A Large and Diverse Dataset for Animal Behavior Understanding}, + booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2022}, + pages = {19023-19034} + } +``` + +
+
diff --git a/docs/src/papers/datasets/ap10k.md b/docs/src/papers/datasets/ap10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..e36988d833ae41efafa7408830b19bbeb8494f2b
--- /dev/null
+++ b/docs/src/papers/datasets/ap10k.md
@@ -0,0 +1,19 @@
+# AP-10K: A Benchmark for Animal Pose Estimation in the Wild
+
+
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
diff --git a/docs/src/papers/datasets/atrw.md b/docs/src/papers/datasets/atrw.md
new file mode 100644
index 0000000000000000000000000000000000000000..fe83ac0e94ab3c513c30d1b016ab4a87d200807b
--- /dev/null
+++ b/docs/src/papers/datasets/atrw.md
@@ -0,0 +1,18 @@
+# ATRW: A Benchmark for Amur Tiger Re-identification in the Wild
+
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
diff --git a/docs/src/papers/datasets/campus_and_shelf.md b/docs/src/papers/datasets/campus_and_shelf.md
new file mode 100644
index 0000000000000000000000000000000000000000..8748be137e2ac3c8704eeb4ee3b70de40c9a7432
--- /dev/null
+++ b/docs/src/papers/datasets/campus_and_shelf.md
@@ -0,0 +1,20 @@
+# 3D Pictorial Structures for Multiple Human Pose Estimation
+
+
+
+ATRW (ACM MM'2020)
+ +```bibtex +@inproceedings{li2020atrw, + title={ATRW: A Benchmark for Amur Tiger Re-identification in the Wild}, + author={Li, Shuyuan and Li, Jianguo and Tang, Hanlin and Qian, Rui and Lin, Weiyao}, + booktitle={Proceedings of the 28th ACM International Conference on Multimedia}, + pages={2590--2598}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/coco.md b/docs/src/papers/datasets/coco.md
new file mode 100644
index 0000000000000000000000000000000000000000..8051dc756b0124816ed4db8e4cf5f31d363f6fa5
--- /dev/null
+++ b/docs/src/papers/datasets/coco.md
@@ -0,0 +1,19 @@
+# Microsoft coco: Common objects in context
+
+
+
+Campus and Shelf (CVPR'2014)
+ +```bibtex +@inproceedings {belagian14multi, + title = {{3D} Pictorial Structures for Multiple Human Pose Estimation}, + author = {Belagiannis, Vasileios and Amin, Sikandar and Andriluka, Mykhaylo and Schiele, Bernt and Navab + Nassir and Ilic, Slobodan}, + booktitle = {IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June}, + organization={IEEE} +} +``` + +
+
diff --git a/docs/src/papers/datasets/coco_wholebody.md b/docs/src/papers/datasets/coco_wholebody.md
new file mode 100644
index 0000000000000000000000000000000000000000..69cb2b98d14b9cf426775944607c8b6d08674736
--- /dev/null
+++ b/docs/src/papers/datasets/coco_wholebody.md
@@ -0,0 +1,17 @@
+# Whole-Body Human Pose Estimation in the Wild
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
diff --git a/docs/src/papers/datasets/coco_wholebody_face.md b/docs/src/papers/datasets/coco_wholebody_face.md
new file mode 100644
index 0000000000000000000000000000000000000000..3e1d3d45011546273f93ba3a131824b7fb70994a
--- /dev/null
+++ b/docs/src/papers/datasets/coco_wholebody_face.md
@@ -0,0 +1,17 @@
+# Whole-Body Human Pose Estimation in the Wild
+
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/coco_wholebody_hand.md b/docs/src/papers/datasets/coco_wholebody_hand.md
new file mode 100644
index 0000000000000000000000000000000000000000..51e21693639d21d8541a102fe9a4fd16ceb9adef
--- /dev/null
+++ b/docs/src/papers/datasets/coco_wholebody_hand.md
@@ -0,0 +1,17 @@
+# Whole-Body Human Pose Estimation in the Wild
+
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/cofw.md b/docs/src/papers/datasets/cofw.md
new file mode 100644
index 0000000000000000000000000000000000000000..20d29acdc704eed6c716eff9fcb4a347aa51c8a7
--- /dev/null
+++ b/docs/src/papers/datasets/cofw.md
@@ -0,0 +1,18 @@
+# Robust face landmark estimation under occlusion
+
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/crowdpose.md b/docs/src/papers/datasets/crowdpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee678aa74f90c5891846832a1343a6e685d37913
--- /dev/null
+++ b/docs/src/papers/datasets/crowdpose.md
@@ -0,0 +1,17 @@
+# CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark
+
+
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+
diff --git a/docs/src/papers/datasets/deepfashion.md b/docs/src/papers/datasets/deepfashion.md
new file mode 100644
index 0000000000000000000000000000000000000000..3955cf30923693f1faa6d7bc335fb7079a5f0dad
--- /dev/null
+++ b/docs/src/papers/datasets/deepfashion.md
@@ -0,0 +1,35 @@
+# DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations
+
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+
+DeepFashion (CVPR'2016)
+ +```bibtex +@inproceedings{liuLQWTcvpr16DeepFashion, + author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou}, + title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations}, + booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2016} +} +``` + +
+
diff --git a/docs/src/papers/datasets/exlpose.md b/docs/src/papers/datasets/exlpose.md
new file mode 100644
index 0000000000000000000000000000000000000000..eb6957dc9c46dc54fa2cae2f6067eacca80b4aa6
--- /dev/null
+++ b/docs/src/papers/datasets/exlpose.md
@@ -0,0 +1,17 @@
+# Human Pose Estimation in Extremely Low-Light Conditions
+
+
+
+DeepFashion (ECCV'2016)
+ +```bibtex +@inproceedings{liuYLWTeccv16FashionLandmark, + author = {Liu, Ziwei and Yan, Sijie and Luo, Ping and Wang, Xiaogang and Tang, Xiaoou}, + title = {Fashion Landmark Detection in the Wild}, + booktitle = {European Conference on Computer Vision (ECCV)}, + month = {October}, + year = {2016} + } +``` + +
+
diff --git a/docs/src/papers/datasets/fly.md b/docs/src/papers/datasets/fly.md
new file mode 100644
index 0000000000000000000000000000000000000000..ed1a9c148ec748d89cf18d26d7ea4a8021fc1b30
--- /dev/null
+++ b/docs/src/papers/datasets/fly.md
@@ -0,0 +1,21 @@
+# Fast animal pose estimation using deep neural networks
+
+
+
+ExLPose (CVPR'2023)
+ +```bibtex +@inproceedings{ExLPose_2023_CVPR, + title={Human Pose Estimation in Extremely Low-Light Conditions}, + author={Sohyun Lee, Jaesung Rim, Boseung Jeong, Geonu Kim, ByungJu Woo, Haechan Lee, Sunghyun Cho, Suha Kwak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + year={2023} +} +``` + +
+
diff --git a/docs/src/papers/datasets/freihand.md b/docs/src/papers/datasets/freihand.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee086020691f4f3c36d08759fa4b603209da2dd5
--- /dev/null
+++ b/docs/src/papers/datasets/freihand.md
@@ -0,0 +1,18 @@
+# Freihand: A dataset for markerless capture of hand pose and shape from single rgb images
+
+
+
+Vinegar Fly (Nature Methods'2019)
+ +```bibtex +@article{pereira2019fast, + title={Fast animal pose estimation using deep neural networks}, + author={Pereira, Talmo D and Aldarondo, Diego E and Willmore, Lindsay and Kislin, Mikhail and Wang, Samuel S-H and Murthy, Mala and Shaevitz, Joshua W}, + journal={Nature methods}, + volume={16}, + number={1}, + pages={117--125}, + year={2019}, + publisher={Nature Publishing Group} +} +``` + +
+
diff --git a/docs/src/papers/datasets/h36m.md b/docs/src/papers/datasets/h36m.md
new file mode 100644
index 0000000000000000000000000000000000000000..143e15417cba0b6bce2d9454c8b15506326ed1ae
--- /dev/null
+++ b/docs/src/papers/datasets/h36m.md
@@ -0,0 +1,22 @@
+# Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments
+
+
+
+FreiHand (ICCV'2019)
+ +```bibtex +@inproceedings{zimmermann2019freihand, + title={Freihand: A dataset for markerless capture of hand pose and shape from single rgb images}, + author={Zimmermann, Christian and Ceylan, Duygu and Yang, Jimei and Russell, Bryan and Argus, Max and Brox, Thomas}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={813--822}, + year={2019} +} +``` + +
+
diff --git a/docs/src/papers/datasets/halpe.md b/docs/src/papers/datasets/halpe.md
new file mode 100644
index 0000000000000000000000000000000000000000..f71793fdbd5f1658a10f493eb1ff6fb598d4fb05
--- /dev/null
+++ b/docs/src/papers/datasets/halpe.md
@@ -0,0 +1,17 @@
+# PaStaNet: Toward Human Activity Knowledge Engine
+
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
diff --git a/docs/src/papers/datasets/horse10.md b/docs/src/papers/datasets/horse10.md
new file mode 100644
index 0000000000000000000000000000000000000000..94e559db5146dd932469ad35b16b8eb4a0f3d4e3
--- /dev/null
+++ b/docs/src/papers/datasets/horse10.md
@@ -0,0 +1,18 @@
+# Pretraining boosts out-of-domain robustness for pose estimation
+
+
+
+Halpe (CVPR'2020)
+ +```bibtex +@inproceedings{li2020pastanet, + title={PaStaNet: Toward Human Activity Knowledge Engine}, + author={Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu and Ma, Ze and Chen, Mingyang and Lu, Cewu}, + booktitle={CVPR}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/human_art.md b/docs/src/papers/datasets/human_art.md
new file mode 100644
index 0000000000000000000000000000000000000000..dc39dabbadb9b42525d22be960b761d2719384d5
--- /dev/null
+++ b/docs/src/papers/datasets/human_art.md
@@ -0,0 +1,16 @@
+# Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes
+
+
+
+Horse-10 (WACV'2021)
+ +```bibtex +@inproceedings{mathis2021pretraining, + title={Pretraining boosts out-of-domain robustness for pose estimation}, + author={Mathis, Alexander and Biasi, Thomas and Schneider, Steffen and Yuksekgonul, Mert and Rogers, Byron and Bethge, Matthias and Mathis, Mackenzie W}, + booktitle={Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision}, + pages={1859--1868}, + year={2021} +} +``` + +
+
diff --git a/docs/src/papers/datasets/interhand.md b/docs/src/papers/datasets/interhand.md
new file mode 100644
index 0000000000000000000000000000000000000000..6b4458a01e0ed1394b7258de15e10a56c5c63432
--- /dev/null
+++ b/docs/src/papers/datasets/interhand.md
@@ -0,0 +1,18 @@
+# InterHand2.6M: A dataset and baseline for 3D interacting hand pose estimation from a single RGB image
+
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
diff --git a/docs/src/papers/datasets/jhmdb.md b/docs/src/papers/datasets/jhmdb.md
new file mode 100644
index 0000000000000000000000000000000000000000..890d788ab2e2ef3e727d08aa897eff9a32b41926
--- /dev/null
+++ b/docs/src/papers/datasets/jhmdb.md
@@ -0,0 +1,19 @@
+# Towards understanding action recognition
+
+
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@article{moon2020interhand2, + title={InterHand2.6M: A dataset and baseline for 3D interacting hand pose estimation from a single RGB image}, + author={Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, + journal={arXiv preprint arXiv:2008.09309}, + year={2020}, + publisher={Springer} +} +``` + +
+
diff --git a/docs/src/papers/datasets/lapa.md b/docs/src/papers/datasets/lapa.md
new file mode 100644
index 0000000000000000000000000000000000000000..f82c50ca22ef785bcd8ae3c8253d304b909ee63f
--- /dev/null
+++ b/docs/src/papers/datasets/lapa.md
@@ -0,0 +1,18 @@
+# A New Dataset and Boundary-Attention Semantic Segmentation for Face Parsing
+
+
+
+JHMDB (ICCV'2013)
+ +```bibtex +@inproceedings{Jhuang:ICCV:2013, + title = {Towards understanding action recognition}, + author = {H. Jhuang and J. Gall and S. Zuffi and C. Schmid and M. J. Black}, + booktitle = {International Conf. on Computer Vision (ICCV)}, + month = Dec, + pages = {3192-3199}, + year = {2013} +} +``` + +
+
diff --git a/docs/src/papers/datasets/locust.md b/docs/src/papers/datasets/locust.md
new file mode 100644
index 0000000000000000000000000000000000000000..896ee03b8310543f1b336ed54419a6262a0d181c
--- /dev/null
+++ b/docs/src/papers/datasets/locust.md
@@ -0,0 +1,20 @@
+# DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning
+
+
+
+LaPa (AAAI'2020)
+ +```bibtex +@inproceedings{liu2020new, + title={A New Dataset and Boundary-Attention Semantic Segmentation for Face Parsing.}, + author={Liu, Yinglu and Shi, Hailin and Shen, Hao and Si, Yue and Wang, Xiaobo and Mei, Tao}, + booktitle={AAAI}, + pages={11637--11644}, + year={2020} +} +``` + +
+
diff --git a/docs/src/papers/datasets/macaque.md b/docs/src/papers/datasets/macaque.md
new file mode 100644
index 0000000000000000000000000000000000000000..be4bec1131bc251d1c6983dd342d91769c09a467
--- /dev/null
+++ b/docs/src/papers/datasets/macaque.md
@@ -0,0 +1,18 @@
+# MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture
+
+
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
diff --git a/docs/src/papers/datasets/mhp.md b/docs/src/papers/datasets/mhp.md
new file mode 100644
index 0000000000000000000000000000000000000000..6dc5b17cccf192d0ec634b787bc38cdea911802c
--- /dev/null
+++ b/docs/src/papers/datasets/mhp.md
@@ -0,0 +1,18 @@
+# Understanding humans in crowded scenes: Deep nested adversarial learning and a new benchmark for multi-human parsing
+
+
+
+MacaquePose (bioRxiv'2020)
+ +```bibtex +@article{labuguen2020macaquepose, + title={MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture}, + author={Labuguen, Rollyn and Matsumoto, Jumpei and Negrete, Salvador and Nishimaru, Hiroshi and Nishijo, Hisao and Takada, Masahiko and Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro}, + journal={bioRxiv}, + year={2020}, + publisher={Cold Spring Harbor Laboratory} +} +``` + +
+
diff --git a/docs/src/papers/datasets/mpi_inf_3dhp.md b/docs/src/papers/datasets/mpi_inf_3dhp.md
new file mode 100644
index 0000000000000000000000000000000000000000..3a26d49fd5bf532aa265ce159d4380e774be5a1e
--- /dev/null
+++ b/docs/src/papers/datasets/mpi_inf_3dhp.md
@@ -0,0 +1,20 @@
+# Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision
+
+
+
+MHP (ACM MM'2018)
+ +```bibtex +@inproceedings{zhao2018understanding, + title={Understanding humans in crowded scenes: Deep nested adversarial learning and a new benchmark for multi-human parsing}, + author={Zhao, Jian and Li, Jianshu and Cheng, Yu and Sim, Terence and Yan, Shuicheng and Feng, Jiashi}, + booktitle={Proceedings of the 26th ACM international conference on Multimedia}, + pages={792--800}, + year={2018} +} +``` + +
+
diff --git a/docs/src/papers/datasets/mpii.md b/docs/src/papers/datasets/mpii.md
new file mode 100644
index 0000000000000000000000000000000000000000..e2df7cfd7d181f02802486667866cf663c442bc0
--- /dev/null
+++ b/docs/src/papers/datasets/mpii.md
@@ -0,0 +1,18 @@
+# 2D Human Pose Estimation: New Benchmark and State of the Art Analysis
+
+
+
+MPI-INF-3DHP (3DV'2017)
+ +```bibtex +@inproceedings{mono-3dhp2017, + author = {Mehta, Dushyant and Rhodin, Helge and Casas, Dan and Fua, Pascal and Sotnychenko, Oleksandr and Xu, Weipeng and Theobalt, Christian}, + title = {Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision}, + booktitle = {3D Vision (3DV), 2017 Fifth International Conference on}, + url = {http://gvv.mpi-inf.mpg.de/3dhp_dataset}, + year = {2017}, + organization={IEEE}, + doi={10.1109/3dv.2017.00064}, +} +``` + +
+
diff --git a/docs/src/papers/datasets/mpii_trb.md b/docs/src/papers/datasets/mpii_trb.md
new file mode 100644
index 0000000000000000000000000000000000000000..b3e96a77d2522851c27ba1301c609ba794a522a4
--- /dev/null
+++ b/docs/src/papers/datasets/mpii_trb.md
@@ -0,0 +1,18 @@
+# TRB: A Novel Triplet Representation for Understanding 2D Human Body
+
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
diff --git a/docs/src/papers/datasets/ochuman.md b/docs/src/papers/datasets/ochuman.md
new file mode 100644
index 0000000000000000000000000000000000000000..5211c341e42937a2ca5a22dac2d62901390720c2
--- /dev/null
+++ b/docs/src/papers/datasets/ochuman.md
@@ -0,0 +1,18 @@
+# Pose2seg: Detection free human instance segmentation
+
+
+
+MPII-TRB (ICCV'2019)
+ +```bibtex +@inproceedings{duan2019trb, + title={TRB: A Novel Triplet Representation for Understanding 2D Human Body}, + author={Duan, Haodong and Lin, Kwan-Yee and Jin, Sheng and Liu, Wentao and Qian, Chen and Ouyang, Wanli}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={9479--9488}, + year={2019} +} +``` + +
+
diff --git a/docs/src/papers/datasets/onehand10k.md b/docs/src/papers/datasets/onehand10k.md
new file mode 100644
index 0000000000000000000000000000000000000000..5710fda4771e79182341b358a173d618f823c2e3
--- /dev/null
+++ b/docs/src/papers/datasets/onehand10k.md
@@ -0,0 +1,21 @@
+# Mask-pose cascaded cnn for 2d hand pose estimation from single color image
+
+
+
+OCHuman (CVPR'2019)
+ +```bibtex +@inproceedings{zhang2019pose2seg, + title={Pose2seg: Detection free human instance segmentation}, + author={Zhang, Song-Hai and Li, Ruilong and Dong, Xin and Rosin, Paul and Cai, Zixi and Han, Xi and Yang, Dingcheng and Huang, Haozhi and Hu, Shi-Min}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={889--898}, + year={2019} +} +``` + +
+
diff --git a/docs/src/papers/datasets/panoptic.md b/docs/src/papers/datasets/panoptic.md
new file mode 100644
index 0000000000000000000000000000000000000000..60719c4df9df2e93756cf43c82cbf0edd8149f1f
--- /dev/null
+++ b/docs/src/papers/datasets/panoptic.md
@@ -0,0 +1,18 @@
+# Hand keypoint detection in single images using multiview bootstrapping
+
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
diff --git a/docs/src/papers/datasets/panoptic_body3d.md b/docs/src/papers/datasets/panoptic_body3d.md
new file mode 100644
index 0000000000000000000000000000000000000000..b7f45c8beb9400101b16c956f26845a1f01c27d7
--- /dev/null
+++ b/docs/src/papers/datasets/panoptic_body3d.md
@@ -0,0 +1,17 @@
+# Panoptic Studio: A Massively Multiview System for Social Motion Capture
+
+
+
+CMU Panoptic HandDB (CVPR'2017)
+ +```bibtex +@inproceedings{simon2017hand, + title={Hand keypoint detection in single images using multiview bootstrapping}, + author={Simon, Tomas and Joo, Hanbyul and Matthews, Iain and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={1145--1153}, + year={2017} +} +``` + +
+
diff --git a/docs/src/papers/datasets/posetrack18.md b/docs/src/papers/datasets/posetrack18.md
new file mode 100644
index 0000000000000000000000000000000000000000..90cfcb54f82aab26851417b2e976da5bc3556c50
--- /dev/null
+++ b/docs/src/papers/datasets/posetrack18.md
@@ -0,0 +1,18 @@
+# Posetrack: A benchmark for human pose estimation and tracking
+
+
+
+CMU Panoptic (ICCV'2015)
+ +```bibtex +@Article = {joo_iccv_2015, +author = {Hanbyul Joo, Hao Liu, Lei Tan, Lin Gui, Bart Nabbe, Iain Matthews, Takeo Kanade, Shohei Nobuhara, and Yaser Sheikh}, +title = {Panoptic Studio: A Massively Multiview System for Social Motion Capture}, +booktitle = {ICCV}, +year = {2015} +} +``` + +
+
diff --git a/docs/src/papers/datasets/rhd.md b/docs/src/papers/datasets/rhd.md
new file mode 100644
index 0000000000000000000000000000000000000000..1855037bdceb07024c192c40b19e8efb599b0cbf
--- /dev/null
+++ b/docs/src/papers/datasets/rhd.md
@@ -0,0 +1,19 @@
+# Learning to Estimate 3D Hand Pose from Single RGB Images
+
+
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+
diff --git a/docs/src/papers/datasets/ubody.md b/docs/src/papers/datasets/ubody.md
new file mode 100644
index 0000000000000000000000000000000000000000..319eabe2b42b3c590d5ed1117d065aef5c3efa64
--- /dev/null
+++ b/docs/src/papers/datasets/ubody.md
@@ -0,0 +1,17 @@
+# One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer
+
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
diff --git a/docs/src/papers/datasets/wflw.md b/docs/src/papers/datasets/wflw.md
new file mode 100644
index 0000000000000000000000000000000000000000..08c3ccced32535c12ee487a3b3f99c6d3d696679
--- /dev/null
+++ b/docs/src/papers/datasets/wflw.md
@@ -0,0 +1,18 @@
+# Look at boundary: A boundary-aware face alignment algorithm
+
+
+
+UBody (CVPR'2023)
+ +```bibtex +@article{lin2023one, + title={One-Stage 3D Whole-Body Mesh Recovery with Component Aware Transformer}, + author={Lin, Jing and Zeng, Ailing and Wang, Haoqian and Zhang, Lei and Li, Yu}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + year={2023}, +} +``` + +
+
diff --git a/docs/src/papers/datasets/zebra.md b/docs/src/papers/datasets/zebra.md
new file mode 100644
index 0000000000000000000000000000000000000000..2727e595fc1a037b84eecb7381d7a5f7de15e90c
--- /dev/null
+++ b/docs/src/papers/datasets/zebra.md
@@ -0,0 +1,20 @@
+# DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning
+
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
diff --git a/docs/src/papers/techniques/albumentations.md b/docs/src/papers/techniques/albumentations.md
new file mode 100644
index 0000000000000000000000000000000000000000..9d09a7a3448cceca73c95003ee262bcea6473bcd
--- /dev/null
+++ b/docs/src/papers/techniques/albumentations.md
@@ -0,0 +1,21 @@
+# Albumentations: fast and flexible image augmentations
+
+
+
+Grévy’s Zebra (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
diff --git a/docs/src/papers/techniques/awingloss.md b/docs/src/papers/techniques/awingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..4d4b93a87c622b6b965cab31ac402b8445934a9a
--- /dev/null
+++ b/docs/src/papers/techniques/awingloss.md
@@ -0,0 +1,31 @@
+# Adaptive Wing Loss for Robust Face Alignment via Heatmap Regression
+
+
+
+Albumentations (Information'2020)
+ +```bibtex +@article{buslaev2020albumentations, + title={Albumentations: fast and flexible image augmentations}, + author={Buslaev, Alexander and Iglovikov, Vladimir I and Khvedchenya, Eugene and Parinov, Alex and Druzhinin, Mikhail and Kalinin, Alexandr A}, + journal={Information}, + volume={11}, + number={2}, + pages={125}, + year={2020}, + publisher={Multidisciplinary Digital Publishing Institute} +} +``` + +
+
+
+## Abstract
+
+
+
+Heatmap regression with a deep network has become one of the mainstream approaches to localize facial landmarks. However, the loss function for heatmap regression is rarely studied. In this paper, we analyze the ideal loss function properties for heatmap regression in face alignment problems. Then we propose a novel loss function, named Adaptive Wing loss, that is able to adapt its shape to different types of ground truth heatmap pixels. This adaptability penalizes loss more on foreground pixels while less on background pixels. To address the imbalance between foreground and background pixels, we also propose Weighted Loss Map, which assigns high weights on foreground and difficult background pixels to help training process focus more on pixels that are crucial to landmark localization. To further improve face alignment accuracy, we introduce boundary prediction and CoordConv with boundary coordinates. Extensive experiments on different benchmarks, including COFW, 300W and WFLW, show our approach outperforms the state-of-the-art by a significant margin on
+various evaluation metrics. Besides, the Adaptive Wing loss also helps other heatmap regression tasks.
+
+
+
+AdaptiveWingloss (ICCV'2019)
+ +```bibtex +@inproceedings{wang2019adaptive, + title={Adaptive wing loss for robust face alignment via heatmap regression}, + author={Wang, Xinyao and Bo, Liefeng and Fuxin, Li}, + booktitle={Proceedings of the IEEE/CVF international conference on computer vision}, + pages={6971--6981}, + year={2019} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/dark.md b/docs/src/papers/techniques/dark.md
new file mode 100644
index 0000000000000000000000000000000000000000..083b7596ab1e7aadb3f154eea58a170b7b22fb54
--- /dev/null
+++ b/docs/src/papers/techniques/dark.md
@@ -0,0 +1,30 @@
+# Distribution-aware coordinate representation for human pose estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+While being the de facto standard coordinate representation for human pose estimation, heatmap has not been investigated in-depth. This work fills this gap. For the first time, we find that the process of decoding the predicted heatmaps into the final joint coordinates in the original image space is surprisingly significant for the performance. We further probe the design limitations of the standard coordinate decoding method, and propose a more principled distributionaware decoding method. Also, we improve the standard coordinate encoding process (i.e. transforming ground-truth coordinates to heatmaps) by generating unbiased/accurate heatmaps. Taking the two together, we formulate a novel Distribution-Aware coordinate Representation of Keypoints (DARK) method. Serving as a model-agnostic plug-in, DARK brings about significant performance boost to existing human pose estimation models. Extensive experiments show that DARK yields the best results on two common benchmarks, MPII and COCO. Besides, DARK achieves the 2nd place entry in the ICCV 2019 COCO Keypoints Challenge. The code is available online.
+
+
+
+DarkPose (CVPR'2020)
+ +```bibtex +@inproceedings{zhang2020distribution, + title={Distribution-aware coordinate representation for human pose estimation}, + author={Zhang, Feng and Zhu, Xiatian and Dai, Hanbin and Ye, Mao and Zhu, Ce}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, + pages={7093--7102}, + year={2020} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/fp16.md b/docs/src/papers/techniques/fp16.md
new file mode 100644
index 0000000000000000000000000000000000000000..7fd7ee0011a5946ed55119bac3d262b67b52d2d5
--- /dev/null
+++ b/docs/src/papers/techniques/fp16.md
@@ -0,0 +1,17 @@
+# Mixed Precision Training
+
+
+
+
+
+
diff --git a/docs/src/papers/techniques/fpn.md b/docs/src/papers/techniques/fpn.md
new file mode 100644
index 0000000000000000000000000000000000000000..0de33f4866e4da72cfd906f08742baf37778e348
--- /dev/null
+++ b/docs/src/papers/techniques/fpn.md
@@ -0,0 +1,30 @@
+# Feature pyramid networks for object detection
+
+
+
+FP16 (ArXiv'2017)
+ +```bibtex +@article{micikevicius2017mixed, + title={Mixed precision training}, + author={Micikevicius, Paulius and Narang, Sharan and Alben, Jonah and Diamos, Gregory and Elsen, Erich and Garcia, David and Ginsburg, Boris and Houston, Michael and Kuchaiev, Oleksii and Venkatesh, Ganesh and others}, + journal={arXiv preprint arXiv:1710.03740}, + year={2017} +} +``` + +
+
+
+## Abstract
+
+
+
+Feature pyramids are a basic component in recognition systems for detecting objects at different scales. But recent deep learning object detectors have avoided pyramid representations, in part because they are compute and memory intensive. In this paper, we exploit the inherent multi-scale, pyramidal hierarchy of deep convolutional networks to construct feature pyramids with marginal extra cost. A topdown architecture with lateral connections is developed for building high-level semantic feature maps at all scales. This architecture, called a Feature Pyramid Network (FPN), shows significant improvement as a generic feature extractor in several applications. Using FPN in a basic Faster R-CNN system, our method achieves state-of-the-art singlemodel results on the COCO detection benchmark without bells and whistles, surpassing all existing single-model entries including those from the COCO 2016 challenge winners. In addition, our method can run at 6 FPS on a GPU and thus is a practical and accurate solution to multi-scale object detection. Code will be made publicly available.
+
+
+
+FPN (CVPR'2017)
+ +```bibtex +@inproceedings{lin2017feature, + title={Feature pyramid networks for object detection}, + author={Lin, Tsung-Yi and Doll{\'a}r, Piotr and Girshick, Ross and He, Kaiming and Hariharan, Bharath and Belongie, Serge}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2117--2125}, + year={2017} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/rle.md b/docs/src/papers/techniques/rle.md
new file mode 100644
index 0000000000000000000000000000000000000000..cdc59d57eccc5d62bd27d8c20d03913e31e0b7c9
--- /dev/null
+++ b/docs/src/papers/techniques/rle.md
@@ -0,0 +1,30 @@
+# Human pose regression with residual log-likelihood estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Heatmap-based methods dominate in the field of human pose estimation by modelling the output distribution through likelihood heatmaps. In contrast, regressionbased methods are more efficient but suffer from inferior performance. In this work, we explore maximum likelihood estimation (MLE) to develop an efficient and effective regression-based methods. From the perspective of MLE, adopting different regression losses is making different assumptions about the output density function. A density function closer to the true distribution leads to a better regression performance. In light of this, we propose a novel regression paradigm with Residual Log-likelihood Estimation (RLE) to capture the underlying output distribution. Concretely, RLE learns the change of the distribution instead of the unreferenced underlying distribution to facilitate the training process. With the proposed reparameterization design, our method is compatible with offthe-shelf flow models. The proposed method is effective, efficient and flexible. We show its potential in various human pose estimation tasks with comprehensive experiments. Compared to the conventional regression paradigm, regression with RLE bring 12.4 mAP improvement on MSCOCO without any test-time overhead. Moreover, for the first time, especially on multi-person pose estimation, our regression method is superior to the heatmap-based methods.
+
+
+
+RLE (ICCV'2021)
+ +```bibtex +@inproceedings{li2021human, + title={Human pose regression with residual log-likelihood estimation}, + author={Li, Jiefeng and Bian, Siyuan and Zeng, Ailing and Wang, Can and Pang, Bo and Liu, Wentao and Lu, Cewu}, + booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision}, + pages={11025--11034}, + year={2021} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/smoothnet.md b/docs/src/papers/techniques/smoothnet.md
new file mode 100644
index 0000000000000000000000000000000000000000..b09988ce44371e4eae84c223ee347565fd124ccc
--- /dev/null
+++ b/docs/src/papers/techniques/smoothnet.md
@@ -0,0 +1,29 @@
+# SmoothNet: A Plug-and-Play Network for Refining Human Poses in Videos
+
+
+
+
+
+
+
+## Abstract
+
+
+
+When analyzing human motion videos, the output jitters from existing pose estimators are highly-unbalanced. Most frames only suffer from slight jitters, while significant jitters occur in those frames with occlusion or poor image quality. Such complex poses often persist in videos, leading to consecutive frames with poor estimation results and large jitters. Existing pose smoothing solutions based on temporal convolutional networks, recurrent neural networks, or low-pass filters cannot deal with such a long-term jitter problem without considering the significant and persistent errors within the jittering video segment. Motivated by the above observation, we propose a novel plug-and-play refinement network, namely SMOOTHNET, which can be attached to any existing pose estimators to improve its temporal smoothness and enhance its per-frame precision simultaneously. Especially, SMOOTHNET is a simple yet effective data-driven fully-connected network with large receptive fields, effectively mitigating the impact of long-term jitters with unreliable estimation results. We conduct extensive experiments on twelve backbone networks with seven datasets across 2D and 3D pose estimation, body recovery, and downstream tasks. Our results demonstrate that the proposed SMOOTHNET consistently outperforms existing solutions, especially on those clips with high errors and long-term jitters.
+
+
+
+SmoothNet (arXiv'2021)
+ +```bibtex +@article{zeng2021smoothnet, + title={SmoothNet: A Plug-and-Play Network for Refining Human Poses in Videos}, + author={Zeng, Ailing and Yang, Lei and Ju, Xuan and Li, Jiefeng and Wang, Jianyi and Xu, Qiang}, + journal={arXiv preprint arXiv:2112.13715}, + year={2021} +} +``` + +
+ +
+
diff --git a/docs/src/papers/techniques/softwingloss.md b/docs/src/papers/techniques/softwingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..524a6089ffee69e109a0a721fa14b820df88ae8b
--- /dev/null
+++ b/docs/src/papers/techniques/softwingloss.md
@@ -0,0 +1,30 @@
+# Structure-Coherent Deep Feature Learning for Robust Face Alignment
+
+
+
+
+
+
+
+## Abstract
+
+
+
+In this paper, we propose a structure-coherent deep feature learning method for face alignment. Unlike most existing face alignment methods which overlook the facial structure cues, we explicitly exploit the relation among facial landmarks to make the detector robust to hard cases such as occlusion and large pose. Specifically, we leverage a landmark-graph relational network to enforce the structural relationships among landmarks. We consider the facial landmarks as structural graph nodes and carefully design the neighborhood to passing features among the most related nodes. Our method dynamically adapts the weights of node neighborhood to eliminate distracted information from noisy nodes, such as occluded landmark point. Moreover, different from most previous works which only tend to penalize the landmarks absolute position during the training, we propose a relative location loss to enhance the information of relative location of landmarks. This relative location supervision further regularizes the facial structure. Our approach considers the interactions among facial landmarks and can be easily implemented on top of any convolutional backbone to boost the performance. Extensive experiments on three popular benchmarks, including WFLW, COFW and 300W, demonstrate the effectiveness of the proposed method. In particular, due to explicit structure modeling, our approach is especially robust to challenging cases resulting in impressive low failure rate on COFW and WFLW datasets.
+
+
+
+SoftWingloss (TIP'2021)
+ +```bibtex +@article{lin2021structure, + title={Structure-Coherent Deep Feature Learning for Robust Face Alignment}, + author={Lin, Chunze and Zhu, Beier and Wang, Quan and Liao, Renjie and Qian, Chen and Lu, Jiwen and Zhou, Jie}, + journal={IEEE Transactions on Image Processing}, + year={2021}, + publisher={IEEE} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/udp.md b/docs/src/papers/techniques/udp.md
new file mode 100644
index 0000000000000000000000000000000000000000..bb4acebfbc9474312e992a67e2a19ef2df12be85
--- /dev/null
+++ b/docs/src/papers/techniques/udp.md
@@ -0,0 +1,30 @@
+# The Devil is in the Details: Delving into Unbiased Data Processing for Human Pose Estimation
+
+
+
+
+
+
+
+## Abstract
+
+
+
+Recently, the leading performance of human pose estimation is dominated by top-down methods. Being a fundamental component in training and inference, data processing has not been systematically considered in pose estimation community, to the best of our knowledge. In this paper, we focus on this problem and find that the devil of top-down pose estimator is in the biased data processing. Specifically, by investigating the standard data processing in state-of-the-art approaches mainly including data transformation and encoding-decoding, we find that the results obtained by common flipping strategy are unaligned with the original ones in inference. Moreover, there is statistical error in standard encoding-decoding during both training and inference. Two problems couple together and significantly degrade the pose estimation performance. Based on quantitative analyses, we then formulate a principled way to tackle this dilemma. Data is processed in continuous space based on unit length (the intervals between pixels) instead of in discrete space with pixel, and a combined classification and regression approach is adopted to perform encoding-decoding. The Unbiased Data Processing (UDP) for human pose estimation can be achieved by combining the two together. UDP not only boosts the performance of existing methods by a large margin but also plays a important role in result reproducing and future exploration. As a model-agnostic approach, UDP promotes SimpleBaseline-ResNet50-256x192 by 1.5 AP (70.2 to 71.7) and HRNet-W32-256x192 by 1.7 AP (73.5 to 75.2) on COCO test-dev set. The HRNet-W48-384x288 equipped with UDP achieves 76.5 AP and sets a new state-of-the-art for human pose estimation. The source code is publicly available for further research.
+
+
+
+UDP (CVPR'2020)
+ +```bibtex +@InProceedings{Huang_2020_CVPR, + author = {Huang, Junjie and Zhu, Zheng and Guo, Feng and Huang, Guan}, + title = {The Devil Is in the Details: Delving Into Unbiased Data Processing for Human Pose Estimation}, + booktitle = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2020} +} +``` + +
+
+
diff --git a/docs/src/papers/techniques/wingloss.md b/docs/src/papers/techniques/wingloss.md
new file mode 100644
index 0000000000000000000000000000000000000000..2aaa05722eda24201cd35e1028349994d1f0fd6b
--- /dev/null
+++ b/docs/src/papers/techniques/wingloss.md
@@ -0,0 +1,31 @@
+# Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks
+
+
+
+
+
+
+
+## Abstract
+
+
+
+We present a new loss function, namely Wing loss, for robust facial landmark localisation with Convolutional Neural Networks (CNNs). We first compare and analyse different loss functions including L2, L1 and smooth L1. The analysis of these loss functions suggests that, for the training of a CNN-based localisation model, more attention should be paid to small and medium range errors. To this end, we design a piece-wise loss function. The new loss amplifies the impact of errors from the interval (-w, w) by switching from L1 loss to a modified logarithm function. To address the problem of under-representation of samples with large out-of-plane head rotations in the training set, we propose a simple but effective boosting strategy, referred to as pose-based data balancing. In particular, we deal with the data imbalance problem by duplicating the minority training samples and perturbing them by injecting random image rotation, bounding box translation and other data augmentation approaches. Last, the proposed approach is extended to create a two-stage framework for robust facial landmark localisation. The experimental results obtained on AFLW and 300W demonstrate the merits of the Wing loss function, and prove the superiority of the proposed method over the state-of-the-art approaches.
+
+
+
+Wingloss (CVPR'2018)
+ +```bibtex +@inproceedings{feng2018wing, + title={Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks}, + author={Feng, Zhen-Hua and Kittler, Josef and Awais, Muhammad and Huber, Patrik and Wu, Xiao-Jun}, + booktitle={Computer Vision and Pattern Recognition (CVPR), 2018 IEEE Conference on}, + year={2018}, + pages ={2235-2245}, + organization={IEEE} +} +``` + +
+
+
diff --git a/docs/zh_cn/Makefile b/docs/zh_cn/Makefile
new file mode 100644
index 0000000000000000000000000000000000000000..d4bb2cbb9eddb1bb1b4f366623044af8e4830919
--- /dev/null
+++ b/docs/zh_cn/Makefile
@@ -0,0 +1,20 @@
+# Minimal makefile for Sphinx documentation
+#
+
+# You can set these variables from the command line, and also
+# from the environment for the first two.
+SPHINXOPTS ?=
+SPHINXBUILD ?= sphinx-build
+SOURCEDIR = .
+BUILDDIR = _build
+
+# Put it first so that "make" without argument is like "make help".
+help:
+ @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
+
+.PHONY: help Makefile
+
+# Catch-all target: route all unknown targets to Sphinx using the new
+# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
+%: Makefile
+ @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
diff --git a/docs/zh_cn/_static/css/readthedocs.css b/docs/zh_cn/_static/css/readthedocs.css
new file mode 100644
index 0000000000000000000000000000000000000000..e75ab1b46a886e3a0031c4715e30f47cbd834d05
--- /dev/null
+++ b/docs/zh_cn/_static/css/readthedocs.css
@@ -0,0 +1,10 @@
+.header-logo {
+ background-image: url("../images/mmpose-logo.png");
+ background-size: 120px 50px;
+ height: 50px;
+ width: 120px;
+}
+
+table.autosummary td {
+ width: 35%
+}
diff --git a/docs/zh_cn/_static/images/mmpose-logo.png b/docs/zh_cn/_static/images/mmpose-logo.png
new file mode 100644
index 0000000000000000000000000000000000000000..1704dc9abdc743f774d5e04782077d0be8bccd73
--- /dev/null
+++ b/docs/zh_cn/_static/images/mmpose-logo.png
@@ -0,0 +1,3 @@
+version https://git-lfs.github.com/spec/v1
+oid sha256:6342cc3ea98ab9910db6d28edaadd2c6b04713a685e486128615cf532cd5e615
+size 28553
diff --git a/docs/zh_cn/advanced_guides/codecs.md b/docs/zh_cn/advanced_guides/codecs.md
new file mode 100644
index 0000000000000000000000000000000000000000..62d5e3089bac422ef2497af8989da0da950e530d
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/codecs.md
@@ -0,0 +1,471 @@
+# 编解码器
+
+在关键点检测任务中,根据算法的不同,需要利用标注信息,生成不同格式的训练目标,比如归一化的坐标值、一维向量、高斯热图等。同样的,对于模型输出的结果,也需要经过处理转换成标注信息格式。我们一般将标注信息到训练目标的处理过程称为编码,模型输出到标注信息的处理过程称为解码。
+
+编码和解码是一对紧密相关的互逆处理过程。在 MMPose 早期版本中,编码和解码过程往往分散在不同模块里,使其不够直观和统一,增加了学习和维护成本。
+
+MMPose 1.0 中引入了新模块 **编解码器(Codec)** ,将关键点数据的编码和解码过程进行集成,以增加代码的友好度和复用性。
+
+编解码器在工作流程中所处的位置如下所示:
+
+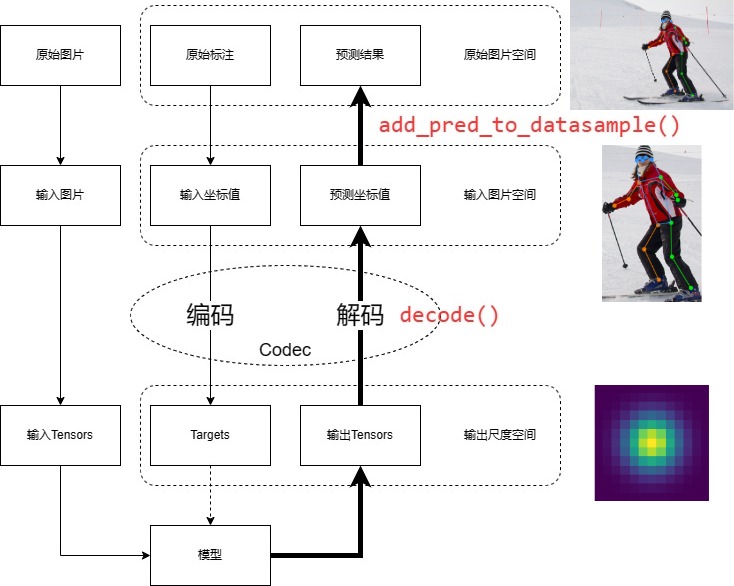
+
+## 基本概念
+
+一个编解码器主要包含两个部分:
+
+- 编码器
+- 解码器
+
+### 编码器
+
+编码器主要负责将处于输入图片尺度的坐标值,编码为模型训练所需要的目标格式,主要包括:
+
+- 归一化的坐标值:用于 Regression-based 方法
+- 一维向量:用于 SimCC-based 方法
+- 高斯热图:用于 Heatmap-based 方法
+
+以 Regression-based 方法的编码器为例:
+
+```Python
+def encode(self,
+ keypoints: np.ndarray,
+ keypoints_visible: Optional[np.ndarray] = None) -> dict:
+ """Encoding keypoints from input image space to normalized space.
+
+ Args:
+ keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D)
+ keypoints_visible (np.ndarray): Keypoint visibilities in shape
+ (N, K)
+
+ Returns:
+ dict:
+ - keypoint_labels (np.ndarray): The normalized regression labels in
+ shape (N, K, D) where D is 2 for 2d coordinates
+ - keypoint_weights (np.ndarray): The target weights in shape
+ (N, K)
+ """
+ if keypoints_visible is None:
+ keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32)
+
+ w, h = self.input_size
+ valid = ((keypoints >= 0) &
+ (keypoints <= [w - 1, h - 1])).all(axis=-1) & (
+ keypoints_visible > 0.5)
+
+ keypoint_labels = (keypoints / np.array([w, h])).astype(np.float32)
+ keypoint_weights = np.where(valid, 1., 0.).astype(np.float32)
+
+ encoded = dict(
+ keypoint_labels=keypoint_labels, keypoint_weights=keypoint_weights)
+
+ return encoded
+```
+
+编码后的数据会在 `PackPoseInputs` 中被转换为 Tensor 格式,并封装到 `data_sample.gt_instance_labels` 中供模型调用,默认包含以下的字段:
+
+- `keypoint_labels`
+- `keypoint_weights`
+- `keypoints_visible_weights`
+
+如要指定要打包的数据字段,可以在编解码器中定义 `label_mapping_table` 属性。例如,在 `VideoPoseLifting` 中:
+
+```Python
+label_mapping_table = dict(
+ trajectory_weights='trajectory_weights',
+ lifting_target_label='lifting_target_label',
+ lifting_target_weight='lifting_target_weight',
+)
+```
+
+`data_sample.gt_instance_labels` 一般主要用于 loss 计算,下面以 `RegressionHead` 中的 `loss()` 为例:
+
+```Python
+def loss(self,
+ inputs: Tuple[Tensor],
+ batch_data_samples: OptSampleList,
+ train_cfg: ConfigType = {}) -> dict:
+ """Calculate losses from a batch of inputs and data samples."""
+
+ pred_outputs = self.forward(inputs)
+
+ keypoint_labels = torch.cat(
+ [d.gt_instance_labels.keypoint_labels for d in batch_data_samples])
+ keypoint_weights = torch.cat([
+ d.gt_instance_labels.keypoint_weights for d in batch_data_samples
+ ])
+
+ # calculate losses
+ losses = dict()
+ loss = self.loss_module(pred_outputs, keypoint_labels,
+ keypoint_weights.unsqueeze(-1))
+
+ losses.update(loss_kpt=loss)
+ ### 后续内容省略 ###
+```
+
+```{note}
+解码器亦会定义封装在 `data_sample.gt_instances` 和 `data_sample.gt_fields` 中的字段。修改编码器中的 `instance_mapping_table` 和 `field_mapping_table` 的值将分别指定封装的字段,其中默认值定义在 [BaseKeypointCodec](https://github.com/open-mmlab/mmpose/blob/main/mmpose/codecs/base.py) 中。
+```
+
+### 解码器
+
+解码器主要负责将模型的输出解码为输入图片尺度的坐标值,处理过程与编码器相反。
+
+以 Regression-based 方法的解码器为例:
+
+```Python
+def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]:
+ """Decode keypoint coordinates from normalized space to input image
+ space.
+
+ Args:
+ encoded (np.ndarray): Coordinates in shape (N, K, D)
+
+ Returns:
+ tuple:
+ - keypoints (np.ndarray): Decoded coordinates in shape (N, K, D)
+ - scores (np.ndarray): The keypoint scores in shape (N, K).
+ It usually represents the confidence of the keypoint prediction
+
+ """
+
+ if encoded.shape[-1] == 2:
+ N, K, _ = encoded.shape
+ normalized_coords = encoded.copy()
+ scores = np.ones((N, K), dtype=np.float32)
+ elif encoded.shape[-1] == 4:
+ # split coords and sigma if outputs contain output_sigma
+ normalized_coords = encoded[..., :2].copy()
+ output_sigma = encoded[..., 2:4].copy()
+ scores = (1 - output_sigma).mean(axis=-1)
+ else:
+ raise ValueError(
+ 'Keypoint dimension should be 2 or 4 (with sigma), '
+ f'but got {encoded.shape[-1]}')
+
+ w, h = self.input_size
+ keypoints = normalized_coords * np.array([w, h])
+
+ return keypoints, scores
+```
+
+默认情况下,`decode()` 方法只提供单个目标数据的解码过程,你也可以通过 `batch_decode()` 来实现批量解码提升执行效率。
+
+## 常见用法
+
+在 MMPose 配置文件中,主要有三处涉及编解码器:
+
+- 定义编解码器
+- 生成训练目标
+- 模型头部
+
+### 定义编解码器
+
+以回归方法生成归一化的坐标值为例,在配置文件中,我们通过如下方式定义编解码器:
+
+```Python
+codec = dict(type='RegressionLabel', input_size=(192, 256))
+```
+
+### 生成训练目标
+
+在数据处理阶段生成训练目标时,需要传入编解码器用于编码:
+
+```Python
+dict(type='GenerateTarget', encoder=codec)
+```
+
+### 模型头部
+
+在 MMPose 中,我们在模型头部对模型的输出进行解码,需要传入编解码器用于解码:
+
+```Python
+head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec
+)
+```
+
+它们在配置文件中的具体位置如下:
+
+```Python
+
+# codec settings
+codec = dict(type='RegressionLabel', input_size=(192, 256)) ## 定义 ##
+
+# model settings
+model = dict(
+ type='TopdownPoseEstimator',
+ data_preprocessor=dict(
+ type='PoseDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ ),
+ neck=dict(type='GlobalAveragePooling'),
+ head=dict(
+ type='RLEHead',
+ in_channels=2048,
+ num_joints=17,
+ loss=dict(type='RLELoss', use_target_weight=True),
+ decoder=codec), ## 模型头部 ##
+ test_cfg=dict(
+ flip_test=True,
+ shift_coords=True,
+ ))
+
+# base dataset settings
+dataset_type = 'CocoDataset'
+data_mode = 'topdown'
+data_root = 'data/coco/'
+
+backend_args = dict(backend='local')
+
+# pipelines
+train_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(type='RandomBBoxTransform'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='GenerateTarget', encoder=codec), ## 生成训练目标 ##
+ dict(type='PackPoseInputs')
+]
+test_pipeline = [
+ dict(type='LoadImage', backend_args=backend_args),
+ dict(type='GetBBoxCenterScale'),
+ dict(type='TopdownAffine', input_size=codec['input_size']),
+ dict(type='PackPoseInputs')
+]
+```
+
+## 已支持编解码器列表
+
+编解码器相关的代码位于 [$MMPOSE/mmpose/codecs/](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/codecs)。目前 MMPose 已支持的编解码器如下所示:
+
+- [RegressionLabel](#RegressionLabel)
+- [IntegralRegressionLabel](#IntegralRegressionLabel)
+- [MSRAHeatmap](#MSRAHeatmap)
+- [UDPHeatmap](#UDPHeatmap)
+- [MegviiHeatmap](#MegviiHeatmap)
+- [SPR](#SPR)
+- [SimCC](#SimCC)
+- [DecoupledHeatmap](#DecoupledHeatmap)
+- [ImagePoseLifting](#ImagePoseLifting)
+- [VideoPoseLifting](#VideoPoseLifting)
+- [MotionBERTLabel](#MotionBERTLabel)
+
+### RegressionLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/regression_label.py#L12)
+
+RegressionLabel 编解码器主要用于 Regression-based 方法,适用于直接把坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为**归一化**的坐标值,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的归一化坐标值解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [DeepPose](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#deeppose-cvpr-2014)
+- [RLE](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rle-iccv-2021)
+
+### IntegralRegressionLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/integral_regression_label.py)
+
+IntegralRegressionLabel 编解码器主要用于 Integral Regression-based 方法,适用于把坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为**归一化**的坐标值,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的归一化坐标值解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [IPR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#ipr-eccv-2018)
+- [DSNT](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#dsnt-2018)
+- [Debias IPR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#debias-ipr-iccv-2021)
+
+### MSRAHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/msra_heatmap.py)
+
+MSRAHeatmap 编解码器主要用于 Heatmap-based 方法,适用于把高斯热图作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 2D 离散高斯分布,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 2D 高斯分布解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [SimpleBaseline2D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simplebaseline2d-eccv-2018)
+- [CPM](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#cpm-cvpr-2016)
+- [HRNet](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#hrnet-cvpr-2019)
+- [DARK](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#darkpose-cvpr-2020)
+
+### UDPHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/udp_heatmap.py)
+
+UDPHeatmap 编解码器主要用于 Heatmap-based 方法,适用于把高斯热图作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 2D 离散高斯分布,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 2D 高斯分布解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [UDP](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#udp-cvpr-2020)
+
+### MegviiHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/megvii_heatmap.py)
+
+MegviiHeatmap 编解码器主要用于 Megvii 提出的 Heatmap-based 方法,适用于把高斯热图作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 2D 离散高斯分布,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 2D 高斯分布解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [MSPN](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#mspn-arxiv-2019)
+- [RSN](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rsn-eccv-2020)
+
+### SPR
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/spr.py)
+
+SPR 编解码器主要用于 DEKR 方法,适用于同时使用中心 Heatmap 和偏移坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的中心关键点坐标值编码为 2D 离散高斯分布,以及相对于中心的偏移,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 2D 高斯分布与偏移进行组合,解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [DEKR](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#dekr-cvpr-2021)
+
+### SimCC
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/simcc_label.py)
+
+SimCC 编解码器主要用于 SimCC-based 方法,适用于两个 1D 离散分布表征的 x 和 y 坐标作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为水平和竖直方向 1D 离散分布,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 1D 离散分布解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [SimCC](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simcc-eccv-2022)
+- [RTMPose](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#rtmpose-arxiv-2023)
+
+### DecoupledHeatmap
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/decoupled_heatmap.py)
+
+DecoupledHeatmap 编解码器主要用于 CID 方法,适用于把高斯热图作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的人体中心坐标值和关键点坐标值编码为 2D 离散高斯分布,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的人体中心与关键点 2D 高斯分布解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [CID](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#cid-cvpr-2022)
+
+### ImagePoseLifting
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/image_pose_lifting.py)
+
+ImagePoseLifting 编解码器主要用于 2D-to-3D pose lifting 方法,适用于把单张图片的 2D 坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 3D 坐标空间归一化的坐标值,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 3D 坐标空间归一化的坐标值解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [SimpleBaseline3D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#simplebaseline3d-iccv-2017)
+
+### VideoPoseLifting
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/video_pose_lifting.py)
+
+VideoPoseLifting 编解码器主要用于 2D-to-3D pose lifting 方法,适用于把视频中一组 2D 坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 3D 坐标空间归一化的坐标值,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 3D 坐标空间归一化的坐标值解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [VideoPose3D](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo_papers/algorithms.html#videopose3d-cvpr-2019)
+
+### MotionBERTLabel
+
+[\[Github\]](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/motionbert_label.py)
+
+MotionBERTLabel 编解码器主要用于 2D-to-3D pose lifting 方法,适用于把视频中一组 2D 坐标值作为训练目标的场景。
+
+**输入:**
+
+- 将**输入图片尺度**的坐标值编码为 3D 坐标空间归一化的坐标值,用于训练目标的生成。
+
+**输出:**
+
+- 将模型输出的 3D 坐标空间归一化的坐标值解码为**输入图片尺度**的坐标值。
+
+常见的使用此编解码器的算法有:
+
+- [MotionBERT](https://mmpose.readthedocs.io/zh_CN/dev-1.x/model_zoo/body_3d_keypoint.html#pose-lift-motionbert-on-h36m)
diff --git a/docs/zh_cn/advanced_guides/customize_datasets.md b/docs/zh_cn/advanced_guides/customize_datasets.md
new file mode 100644
index 0000000000000000000000000000000000000000..9d1db35cebdfb511365d2848ffbe37133aa1e1e9
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/customize_datasets.md
@@ -0,0 +1,264 @@
+# 自定义数据集
+
+MMPose 目前已支持了多个任务和相应的数据集。您可以在 [数据集](https://mmpose.readthedocs.io/zh_CN/latest/dataset_zoo.html) 找到它们。请按照相应的指南准备数据。
+
+
+
+- [自定义数据集-将数据组织为 COCO 格式](#自定义数据集-将数据组织为-coco-格式)
+- [创建自定义数据集的元信息文件](#创建自定义数据集的元信息文件)
+- [创建自定义数据集类](#创建自定义数据集类)
+- [创建自定义配置文件](#创建自定义配置文件)
+- [数据集封装](#数据集封装)
+
+
+
+## 将数据组织为 COCO 格式
+
+最简单的使用自定义数据集的方法是将您的注释格式转换为 COCO 数据集格式。
+
+COCO 格式的注释 JSON 文件具有以下必要键:
+
+```python
+'images': [
+ {
+ 'file_name': '000000001268.jpg',
+ 'height': 427,
+ 'width': 640,
+ 'id': 1268
+ },
+ ...
+],
+'annotations': [
+ {
+ 'segmentation': [[426.36,
+ ...
+ 424.34,
+ 223.3]],
+ 'keypoints': [0,0,0,
+ 0,0,0,
+ 0,0,0,
+ 427,220,2,
+ 443,222,2,
+ 414,228,2,
+ 449,232,2,
+ 408,248,1,
+ 454,261,2,
+ 0,0,0,
+ 0,0,0,
+ 411,287,2,
+ 431,287,2,
+ 0,0,0,
+ 458,265,2,
+ 0,0,0,
+ 466,300,1],
+ 'num_keypoints': 10,
+ 'area': 3894.5826,
+ 'iscrowd': 0,
+ 'image_id': 1268,
+ 'bbox': [402.34, 205.02, 65.26, 88.45],
+ 'category_id': 1,
+ 'id': 215218
+ },
+ ...
+],
+'categories': [
+ {'id': 1, 'name': 'person'},
+ ]
+```
+
+JSON 标注文件中有三个关键词是必需的:
+
+- `images`:包含所有图像信息的列表,每个图像都有一个 `file_name`、`height`、`width` 和 `id` 键。
+- `annotations`:包含所有实例标注信息的列表,每个实例都有一个 `segmentation`、`keypoints`、`num_keypoints`、`area`、`iscrowd`、`image_id`、`bbox`、`category_id` 和 `id` 键。
+- `categories`:包含所有类别信息的列表,每个类别都有一个 `id` 和 `name` 键。以人体姿态估计为例,`id` 为 1,`name` 为 `person`。
+
+如果您的数据集已经是 COCO 格式的,那么您可以直接使用 `CocoDataset` 类来读取该数据集。
+
+## 创建自定义数据集的元信息文件
+
+对于一个新的数据集而言,您需要创建一个新的数据集元信息文件。该文件包含了数据集的基本信息,如关键点个数、排列顺序、可视化颜色、骨架连接关系等。元信息文件通常存放在 `config/_base_/datasets/` 目录下,例如:
+
+```
+config/_base_/datasets/custom.py
+```
+
+元信息文件中需要包含以下信息:
+
+- `keypoint_info`:每个关键点的信息:
+ 1. `name`: 关键点名称,必须是唯一的,例如 `nose`、`left_eye` 等。
+ 2. `id`: 关键点 ID,必须是唯一的,从 0 开始。
+ 3. `color`: 关键点可视化时的颜色,以 (\[B, G, R\]) 格式组织起来,用于可视化。
+ 4. `type`: 关键点类型,可以是 `upper`、`lower` 或 `''`,用于数据增强 [RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/b225a773d168fc2afd48cde5f76c0202d1ba2f52/mmpose/datasets/transforms/common_transforms.py#L263)。
+ 5. `swap`: 关键点交换关系,用于水平翻转数据增强 [RandomFlip](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L94)。
+- `skeleton_info`:骨架连接关系,用于可视化。
+- `joint_weights`:每个关键点的权重,用于损失函数计算。
+- `sigma`:标准差,用于计算 OKS 分数,详细信息请参考 [keypoints-eval](https://cocodataset.org/#keypoints-eval)。
+
+下面是一个简化版本的元信息文件([完整版](/configs/_base_/datasets/coco.py)):
+
+```python
+dataset_info = dict(
+ dataset_name='coco',
+ paper_info=dict(
+ author='Lin, Tsung-Yi and Maire, Michael and '
+ 'Belongie, Serge and Hays, James and '
+ 'Perona, Pietro and Ramanan, Deva and '
+ r'Doll{\'a}r, Piotr and Zitnick, C Lawrence',
+ title='Microsoft coco: Common objects in context',
+ container='European conference on computer vision',
+ year='2014',
+ homepage='http://cocodataset.org/',
+ ),
+ keypoint_info={
+ 0:
+ dict(name='nose', id=0, color=[51, 153, 255], type='upper', swap=''),
+ 1:
+ dict(
+ name='left_eye',
+ id=1,
+ color=[51, 153, 255],
+ type='upper',
+ swap='right_eye'),
+ ...
+ 16:
+ dict(
+ name='right_ankle',
+ id=16,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle')
+ },
+ skeleton_info={
+ 0:
+ dict(link=('left_ankle', 'left_knee'), id=0, color=[0, 255, 0]),
+ ...
+ 18:
+ dict(
+ link=('right_ear', 'right_shoulder'), id=18, color=[51, 153, 255])
+ },
+ joint_weights=[
+ 1., 1., 1., 1., 1., 1., 1., 1.2, 1.2, 1.5, 1.5, 1., 1., 1.2, 1.2, 1.5,
+ 1.5
+ ],
+ sigmas=[
+ 0.026, 0.025, 0.025, 0.035, 0.035, 0.079, 0.079, 0.072, 0.072, 0.062,
+ 0.062, 0.107, 0.107, 0.087, 0.087, 0.089, 0.089
+ ])
+```
+
+## 创建自定义数据集类
+
+如果标注信息不是用 COCO 格式存储的,那么您需要创建一个新的数据集类。数据集类需要继承自 `BaseDataset` 类,并且需要按照以下步骤实现:
+
+1. 在 `mmpose/datasets/datasets` 目录下找到该数据集符合的 package,如果没有符合的,则创建一个新的 package。
+
+2. 在该 package 下创建一个新的数据集类,在对应的注册器中进行注册:
+
+ ```python
+ from mmengine.dataset import BaseDataset
+ from mmpose.registry import DATASETS
+
+ @DATASETS.register_module(name='MyCustomDataset')
+ class MyCustomDataset(BaseDataset):
+ ```
+
+ 如果未注册,你会在运行时遇到 `KeyError: 'XXXXX is not in the dataset registry'`。
+ 关于 `mmengine.BaseDataset` 的更多信息,请参考 [这个文档](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html)。
+
+3. 确保你在 package 的 `__init__.py` 中导入了该数据集类。
+
+4. 确保你在 `mmpose/datasets/__init__.py` 中导入了该 package。
+
+## 创建自定义配置文件
+
+在配置文件中,你需要修改跟数据集有关的部分,例如:
+
+```python
+...
+# 自定义数据集类
+dataset_type = 'MyCustomDataset' # or 'CocoDataset'
+
+train_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/train/data',
+ ann_file='path/to/your/train/json',
+ data_prefix=dict(img='path/to/your/train/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+val_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/val/data',
+ ann_file='path/to/your/val/json',
+ data_prefix=dict(img='path/to/your/val/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+
+test_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root/of/your/test/data',
+ ann_file='path/to/your/test/json',
+ data_prefix=dict(img='path/to/your/test/img'),
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+...
+```
+
+请确保所有的路径都是正确的。
+
+## 数据集封装
+
+在 MMPose 中,支持使用 MMPose 实现的数据集封装和 [MMEngine](https://github.com/open-mmlab/mmengine) 实现的数据集封装。目前 [MMEngine](https://github.com/open-mmlab/mmengine) 支持以下数据集封装:
+
+- [ConcatDataset](https://mmengine.readthedocs.io/zh_CN/latest/advanced_tutorials/basedataset.html#concatdataset)
+- [RepeatDataset](https://mmengine.readthedocs.io/zh_CN/latest/advanced_tutorials/basedataset.html#repeatdataset)
+
+### CombinedDataset
+
+MMPose 提供了一个 [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) 类,它可以将多个数据集封装成一个数据集。它的使用方法如下:
+
+```python
+dataset_1 = dict(
+ type='dataset_type_1',
+ data_root='root/of/your/dataset1',
+ data_prefix=dict(img_path='path/to/your/img'),
+ ann_file='annotations/train.json',
+ pipeline=[
+ # 使用转换器将标注信息统一为需要的格式
+ converter_transform_1
+ ])
+
+dataset_2 = dict(
+ type='dataset_type_2',
+ data_root='root/of/your/dataset2',
+ data_prefix=dict(img_path='path/to/your/img'),
+ ann_file='annotations/train.json',
+ pipeline=[
+ converter_transform_2
+ ])
+
+shared_pipeline = [
+ LoadImage(),
+ ParseImage(),
+]
+
+combined_dataset = dict(
+ type='CombinedDataset',
+ metainfo=dict(from_file='path/to/your/metainfo'),
+ datasets=[dataset_1, dataset_2],
+ pipeline=shared_pipeline,
+)
+```
+
+- **合并数据集的元信息** 决定了标注格式,可以是子数据集的元信息,也可以是自定义的元信息。如果要自定义元信息,可以参考 [创建自定义数据集的元信息文件](#创建自定义数据集的元信息文件)。
+- **KeypointConverter** 用于将不同的标注格式转换成统一的格式。比如将关键点个数不同、关键点排列顺序不同的数据集进行合并。
+- 更详细的说明请前往[混合数据集训练](../user_guides/mixed_datasets.md)。
diff --git a/docs/zh_cn/advanced_guides/customize_evaluation.md b/docs/zh_cn/advanced_guides/customize_evaluation.md
new file mode 100644
index 0000000000000000000000000000000000000000..95effaf9ca0f08b8edcae2d28d30a30f663f31a1
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/customize_evaluation.md
@@ -0,0 +1,5 @@
+# Customize Evaluation
+
+Coming soon.
+
+Currently, you can refer to [Evaluation Tutorial of MMEngine](https://mmengine.readthedocs.io/en/latest/tutorials/evaluation.html) to customize your own evaluation.
diff --git a/docs/zh_cn/advanced_guides/customize_logging.md b/docs/zh_cn/advanced_guides/customize_logging.md
new file mode 100644
index 0000000000000000000000000000000000000000..093a530dba933bda7dcae4ff33189f816c51f970
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/customize_logging.md
@@ -0,0 +1,3 @@
+# Customize Logging
+
+Coming soon.
diff --git a/docs/zh_cn/advanced_guides/customize_optimizer.md b/docs/zh_cn/advanced_guides/customize_optimizer.md
new file mode 100644
index 0000000000000000000000000000000000000000..fd6a28297f16cd4a04064b1617fb5ef67af7f13e
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/customize_optimizer.md
@@ -0,0 +1,3 @@
+# Customize Optimizer and Scheduler
+
+Coming soon.
diff --git a/docs/zh_cn/advanced_guides/customize_transforms.md b/docs/zh_cn/advanced_guides/customize_transforms.md
new file mode 100644
index 0000000000000000000000000000000000000000..0da83597c3a34ead9e869e9c555a60053be1f319
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/customize_transforms.md
@@ -0,0 +1,213 @@
+# 自定义数据变换和数据增强
+
+### 数据变换
+
+在**OpenMMLab**算法库中,数据集的构建和数据的准备是相互解耦的,通常,数据集的构建只对数据集进行解析,记录每个样本的基本信息,而数据的准备则是通过一系列的数据变换,根据样本的基本信息进行数据加载、预处理、格式化等操作。
+
+### 数据变换的使用
+
+**MMPose**中的`数据变换`和`数据增强`类定义在[$MMPose/datasets/transforms](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/datasets/transforms)目录中,对应的文件结构如下:
+
+```txt
+mmpose
+|----datasets
+ |----transforms
+ |----bottomup_transforms # 自底向上
+ |----common_transforms # 常用变换
+ |----converting # 关键点转换
+ |----formatting # 输入数据格式化
+ |----loading # 原始数据加载
+ |----pose3d_transforms # 三维变换
+ |----topdown_transforms # 自顶向下
+```
+
+在**MMPose**中,**数据增强**和**数据变换**是使用者经常需要考虑的一个阶段,可参考如下流程进行相关阶段的设计:
+
+[](https://mermaid-js.github.io/mermaid-live-editor/edit#pako:eNp9UT1LA0EQ_SvH1knhXXeFhYpfWIQklVwz3s7mFvd2jr09JIaAjQQRRLAU0Ua0t5X8m4v-DHcThPOIqfbNe2_fMDMTlhJHFjOh6CLNwNjgpJ_oICirs5GBIguGBnQpyOTlluf3lSz8ewhK7BAfe9wnC1aS9niQSWGXJJbyEj3aJUXmWFpLxpeo-T8NQs8foEYDFodgRmg3f4g834P0vEclHumiavrru-f67bZ-nH_dzIJud7s9yUpfvMwWH-_r9Ea5lL_nD_X16ypvg_507yLrq09vaVGtLuHflLAlR42EdUNErMNyNDlI7u438e6E2QxzTFjsIEcBlbIJS_TUWaGyNBjrlMXWVNhhVcHdlvckuKXmLBagSscWoE-JfuvpD2uI1Wk)
+
+[common_transforms](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py)组件提供了常用的`RandomFlip`,`RandomHalfBody`数据增强算法。
+
+- `Top-Down`方法中`Shift`,`Rotate`,`Resize`等操作体现为[RandomBBoxTransform](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L435)方法。
+- `Buttom-Up`算法中体现为[BottomupResize](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/bottomup_transforms.py#L327)方法。
+- `pose-3d`则为[RandomFlipAroundRoot](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/pose3d_transforms.py#L13)方法。
+
+**MMPose**对于`Top-Down`、`Buttom-Up`,`pose-3d`都提供了对应的数据变换接口。通过采用仿射变换,将图像和坐标标注从`原始图片空间`变换到`输入图片空间`。
+
+- `Top-Down`方法中体现为[TopdownAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/topdown_transforms.py#L14)。
+- `Buttom-Up`方法体现为[BottomupRandomAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/bottomup_transforms.py#L134)。
+
+以[RandomFlip](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py)为例,该方法随机的对`原始图片`进行变换,并转换为`输入图像`或`中间图像`。要定义一个数据变换的过程,需要继承[BaseTransform](https://github.com/open-mmlab/mmcv/blob/main/mmcv/transforms/base.py)类,并进行`TRANSFORM`注册:
+
+```python
+from mmcv.transforms import BaseTransform
+from mmpose.registry import TRANSFORMS
+
+@TRANSFORMS.register_module()
+class RandomFlip(BaseTransform):
+ """Randomly flip the image, bbox and keypoints.
+
+ Required Keys:
+
+ - img
+ - img_shape
+ - flip_indices
+ - input_size (optional)
+ - bbox (optional)
+ - bbox_center (optional)
+ - keypoints (optional)
+ - keypoints_visible (optional)
+ - img_mask (optional)
+
+ Modified Keys:
+
+ - img
+ - bbox (optional)
+ - bbox_center (optional)
+ - keypoints (optional)
+ - keypoints_visible (optional)
+ - img_mask (optional)
+
+ Added Keys:
+
+ - flip
+ - flip_direction
+
+ Args:
+ prob (float | list[float]): The flipping probability. If a list is
+ given, the argument `direction` should be a list with the same
+ length. And each element in `prob` indicates the flipping
+ probability of the corresponding one in ``direction``. Defaults
+ to 0.5
+ direction (str | list[str]): The flipping direction. Options are
+ ``'horizontal'``, ``'vertical'`` and ``'diagonal'``. If a list is
+ is given, each data sample's flipping direction will be sampled
+ from a distribution determined by the argument ``prob``. Defaults
+ to ``'horizontal'``.
+ """
+ def __init__(self,
+ prob: Union[float, List[float]] = 0.5,
+ direction: Union[str, List[str]] = 'horizontal') -> None:
+ if isinstance(prob, list):
+ assert is_list_of(prob, float)
+ assert 0 <= sum(prob) <= 1
+ elif isinstance(prob, float):
+ assert 0 <= prob <= 1
+ else:
+ raise ValueError(f'probs must be float or list of float, but \
+ got `{type(prob)}`.')
+ self.prob = prob
+
+ valid_directions = ['horizontal', 'vertical', 'diagonal']
+ if isinstance(direction, str):
+ assert direction in valid_directions
+ elif isinstance(direction, list):
+ assert is_list_of(direction, str)
+ assert set(direction).issubset(set(valid_directions))
+ else:
+ raise ValueError(f'direction must be either str or list of str, \
+ but got `{type(direction)}`.')
+ self.direction = direction
+
+ if isinstance(prob, list):
+ assert len(prob) == len(self.direction)
+```
+
+**输入**:
+
+- `prob`指定了在水平,垂直,斜向等变换的概率,是一个范围在\[0,1\]之间的浮点数`list`。
+- `direction`指定了数据变换的方向:
+ - `horizontal`水平变换
+ - `vertical`垂直变换
+ - `diagonal`对角变换
+
+**输出**:
+
+- 输出一个经过**数据变换**后的`dict`数据
+
+`RandomFlip`的[transform](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/common_transforms.py#L187)实现了对输入图像的以给定的`prob`概率进行水平、垂直或是对角方向的数据翻转,并返回输出图像。
+
+以下是使用`对角翻转变换`的一个简单示例:
+
+```python
+from mmpose.datasets.transforms import LoadImage, RandomFlip
+import mmcv
+
+# 从路径中加载原始图片
+results = dict(
+ img_path='data/test/multi-person.jpeg'
+ )
+transform = LoadImage()
+results = transform(results)
+# 此时,加载的原始图片是一个包含以下属性的`dict`:
+# - `img_path`: 图片的绝对路径
+# - `img`: 图片的像素点
+# - `img_shape`: 图片的形状
+# - `ori_shape`: 图片的原始形状
+
+# 对原始图像进行对角翻转变换
+transform = RandomFlip(prob=1., direction='diagonal')
+results = transform(results)
+# 此时,加载的原始图片是一个包含以下属性的`dict`:
+# - `img_path`: 图片的绝对路径
+# - `img`: 图片的像素点
+# - `img_shape`: 图片的形状
+# - `ori_shape`: 图片的原始形状
+# - `flip`: 图片是否进行翻转变换
+# - `flip_direction`: 图片进行翻转变换的方向
+
+# 取出经过翻转变换后的图片
+mmcv.imshow(results['img'])
+```
+
+更多有关自定义数据变换和增强的使用方法,可以参考[$MMPose/test/test_datasets/test_transforms/test_common_transforms](https://github.com/open-mmlab/mmpose/blob/main/tests/test_datasets/test_transforms/test_common_transforms.py#L59)等。
+
+#### RandomHalfBody
+
+[RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L263)**数据增强**算法概率的进行上半身或下半身的**数据变换**。
+**输入**:
+
+- `min_total_keypoints`最小总关键点数
+- `min_half_keypoints`最小半身关键点数
+- `padding`bbox的填充比例
+- `prob`在关键点数目符合要求下,接受半身变换的概率
+
+**输出**:
+
+- 输出一个经过**数据变换**后的`dict`数据
+
+#### TopdownAffine
+
+[TopdownAffine](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/topdown_transforms.py#L14)**数据变换**算法通过仿射变换将`原始图片`变换为`输入图片`。
+
+**输入**:
+
+- `input_size`bbox区域将会被裁剪和修正到的\[w,h\]大小
+- `use_udp`是否使用公正的数据过程[UDP](https://arxiv.org/abs/1911.07524)
+
+**输出**:
+
+- 输出一个经过**数据变换**后的`dict`数据
+
+### 在流水线中使用数据增强和变换
+
+配置文件中的**数据增强**和**数据变换**过程可以是如下示例:
+
+```python
+train_pipeline_stage2 = [
+ ...
+ dict(type='RandomFlip', direction='horizontal'),
+ dict(type='RandomHalfBody'),
+ dict(
+ type='RandomBBoxTransform',
+ shift_factor=0.,
+ scale_factor=[0.75, 1.25],
+ rotate_factor=60),
+ dict(
+ type='TopdownAffine',
+ input_size=codec['input_size']),
+ ...
+]
+```
+
+示例中的流水线对输入数据进行**数据增强**,进行随机的水平增强和半身增强,
+并进行`Top-Down`的`Shift`、`Rotate`、`Resize`操作,通过`TopdownAffine`操作实现仿射变换,变换至`输入图片空间`。
diff --git a/docs/zh_cn/advanced_guides/dataflow.md b/docs/zh_cn/advanced_guides/dataflow.md
new file mode 100644
index 0000000000000000000000000000000000000000..9f098b028dd78ee1a864064d598587bedef9b288
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/dataflow.md
@@ -0,0 +1,3 @@
+# Dataflow in MMPose
+
+Coming soon.
diff --git a/docs/zh_cn/advanced_guides/implement_new_models.md b/docs/zh_cn/advanced_guides/implement_new_models.md
new file mode 100644
index 0000000000000000000000000000000000000000..34fe2ba128aeabe9eb75c573a47ed65ea5051549
--- /dev/null
+++ b/docs/zh_cn/advanced_guides/implement_new_models.md
@@ -0,0 +1,163 @@
+# 实现新模型
+
+本教程将介绍如何在 MMPose 中实现你自己的模型。我们经过总结,将实现新模型这一需求拆分为两类:
+
+1. 基于 MMPose 中已支持的算法范式,对模型中的模块(骨干网络、颈部、预测头、编解码器等)进行自定义
+2. 实现新的算法范式
+
+## 基础知识
+
+不论你想实现的模型是以上哪一种,这一节的内容都对你很重要,因为它是 OpenMMLab 系列算法库构建模型的基本原则。
+在 MMPose 中,所有与模型结构实现相关的代码都存放在 [models 目录](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models)下:
+
+```shell
+mmpose
+|----models
+ |----backbones # 骨干网络
+ |----data_preprocessors # 数据预处理,如:图片归一化
+ |----heads # 预测头
+ |----losses # 损失函数
+ |----necks # 颈部
+ |----pose_estimators # 姿态估计算法范式
+ |----utils # 工具方法
+```
+
+你可以参考以下流程图来定位你所需要实现的模块:
+
+
+
+## 姿态估计算法范式
+
+在姿态估计范式中,我们会定义一个模型的推理流程,并在 `predict()` 中对模型输出结果进行解码,先将其从 `输出尺度空间` 用 [编解码器](./codecs.md) 变换到 `输入图片空间`,然后再结合元信息变换到 `原始图片空间`。
+
+
+
+当前 MMPose 已支持以下几类算法范式:
+
+1. [Top-down](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/topdown.py):Pose 模型的输入为经过裁剪的单个目标(动物、人体、人脸、人手、植物、衣服等)图片,输出为这个目标的关键点预测结果
+2. [Bottom-up](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/bottomup.py):Pose 模型的输入为包含任意个目标的图片,输出为图片中所有目标的关键点预测结果
+3. [Pose Lifting](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/pose_lifter.py):Pose 模型的输入为 2D 关键点坐标数组,输出为 3D 关键点坐标数组
+
+如果你要实现的模型不属于以上算法范式,那么你需要继承 [BasePoseEstimator](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/pose_estimators/base.py) 类来定义你自己的算法范式。
+
+## 骨干网络
+
+如果希望实现一个新的骨干网络,你需要在 [backbones 目录](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/backbones) 下新建一个文件进行定义。
+
+新建的骨干网络需要继承 [BaseBackbone](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/backbones/base_backbone.py) 类,其他方面与你继承 nn.Module 来创建没有任何不同。
+
+在完成骨干网络的实现后,你需要使用 `MODELS` 来对其进行注册:
+
+```Python3
+from mmpose.registry import MODELS
+from .base_backbone import BaseBackbone
+
+
+@MODELS.register_module()
+class YourNewBackbone(BaseBackbone):
+```
+
+最后,请记得在 [backbones/\_\_init\_\_.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/backbones/__init__.py) 中导入你的新骨干网络。
+
+## 预测头部
+
+新的预测头部的加入与骨干网络流程类似,你需要在 [heads 目录](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/heads) 下新建一个文件进行定义,然后继承 [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py)。
+
+需要特别注意的一点是,在 MMPose 中会在 Head 里进行损失函数的计算。根据训练与评测阶段的不同,分别执行 `loss()` 和 `predict()`。
+
+在 `predict()` 中,模型会调用对应编解码器的 `decode()` 方法,将模型输出的结果从 `输出尺度空间` 转换到 `输入图片空间` 。
+
+在完成预测头部的实现后,你需要使用 `MODELS` 来对其进行注册:
+
+```Python3
+from mmpose.registry import MODELS
+from ..base_head import BaseHead
+
+@MODELS.register_module()
+class YourNewHead(BaseHead):
+```
+
+最后,请记得在 [heads/\_\_init\_\_.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/__init__.py) 中导入你的新预测头部。
+
+### 关键点可见性预测头部
+
+许多模型都是通过对关键点坐标预测的置信度来判断关键点的可见性的。然而,这种解决方案并非最优。我们提供了一个叫做 [VisPredictHead](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/models/heads/hybrid_heads/vis_head.py) 的头部模块包装器,使得头部模块能够直接预测关键点的可见性。这个包装器是用训练数据中关键点可见性真值来训练的。因此,其预测会更加可靠。用户可以通过修改配置文件来对自己的头部模块加上这个包装器。下面是一个例子:
+
+```python
+model=dict(
+ ...
+ head=dict(
+ type='VisPredictHead',
+ loss=dict(
+ type='BCELoss',
+ use_target_weight=True,
+ use_sigmoid=True,
+ loss_weight=1e-3),
+ pose_cfg=dict(
+ type='HeatmapHead',
+ in_channels=2048,
+ out_channels=17,
+ loss=dict(type='KeypointMSELoss', use_target_weight=True),
+ decoder=codec)),
+ ...
+)
+```
+
+要实现这样一个预测头部模块包装器,我们只需要像定义正常的预测头部一样,继承 [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py),然后在 `__init__()` 中传入关键点定位的头部配置,并通过 `MODELS.build()` 进行实例化。如下所示:
+
+```python
+@MODELS.register_module()
+class VisPredictHead(BaseHead):
+ """VisPredictHead must be used together with other heads. It can predict
+ keypoints coordinates of and their visibility simultaneously. In the
+ current version, it only supports top-down approaches.
+
+ Args:
+ pose_cfg (Config): Config to construct keypoints prediction head
+ loss (Config): Config for visibility loss. Defaults to use
+ :class:`BCELoss`
+ use_sigmoid (bool): Whether to use sigmoid activation function
+ init_cfg (Config, optional): Config to control the initialization. See
+ :attr:`default_init_cfg` for default settings
+ """
+
+ def __init__(self,
+ pose_cfg: ConfigType,
+ loss: ConfigType = dict(
+ type='BCELoss', use_target_weight=False,
+ use_sigmoid=True),
+ init_cfg: OptConfigType = None):
+
+ if init_cfg is None:
+ init_cfg = self.default_init_cfg
+
+ super().__init__(init_cfg)
+
+ self.in_channels = pose_cfg['in_channels']
+ if pose_cfg.get('num_joints', None) is not None:
+ self.out_channels = pose_cfg['num_joints']
+ elif pose_cfg.get('out_channels', None) is not None:
+ self.out_channels = pose_cfg['out_channels']
+ else:
+ raise ValueError('VisPredictHead requires \'num_joints\' or'
+ ' \'out_channels\' in the pose_cfg.')
+
+ self.loss_module = MODELS.build(loss)
+
+ self.pose_head = MODELS.build(pose_cfg)
+ self.pose_cfg = pose_cfg
+
+ self.use_sigmoid = loss.get('use_sigmoid', False)
+
+ modules = [
+ nn.AdaptiveAvgPool2d(1),
+ nn.Flatten(),
+ nn.Linear(self.in_channels, self.out_channels)
+ ]
+ if self.use_sigmoid:
+ modules.append(nn.Sigmoid())
+
+ self.vis_head = nn.Sequential(*modules)
+```
+
+然后你只需要像一个普通的预测头一样继续实现其余部分即可。
diff --git a/docs/zh_cn/api.rst b/docs/zh_cn/api.rst
new file mode 100644
index 0000000000000000000000000000000000000000..48819a2531f7b21faea826f0ad519ecbcdabcd3e
--- /dev/null
+++ b/docs/zh_cn/api.rst
@@ -0,0 +1,134 @@
+mmpose.apis
+-------------
+.. automodule:: mmpose.apis
+ :members:
+
+mmpose.codecs
+-------------
+.. automodule:: mmpose.codecs
+ :members:
+
+mmpose.models
+---------------
+backbones
+^^^^^^^^^^^
+.. automodule:: mmpose.models.backbones
+ :members:
+
+necks
+^^^^^^^^^^^
+.. automodule:: mmpose.models.necks
+ :members:
+
+detectors
+^^^^^^^^^^^
+.. automodule:: mmpose.models.pose_estimators
+ :members:
+
+heads
+^^^^^^^^^^^^^^^
+.. automodule:: mmpose.models.heads
+ :members:
+
+losses
+^^^^^^^^^^^
+.. automodule:: mmpose.models.losses
+ :members:
+
+misc
+^^^^^^^^^^^
+.. automodule:: mmpose.models.utils
+ :members:
+
+mmpose.datasets
+-----------------
+.. automodule:: mmpose.datasets
+ :members:
+
+datasets
+^^^^^^^^^^^
+.. automodule:: mmpose.datasets.datasets.base
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.body
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.face
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.hand
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.animal
+ :members:
+ :noindex:
+
+.. automodule:: mmpose.datasets.datasets.fashion
+ :members:
+ :noindex:
+
+transforms
+^^^^^^^^^^^
+.. automodule:: mmpose.datasets.transforms.loading
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.common_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.topdown_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.bottomup_transforms
+ :members:
+
+.. automodule:: mmpose.datasets.transforms.formatting
+ :members:
+
+mmpose.structures
+---------------
+.. automodule:: mmpose.structures
+ :members:
+
+bbox
+^^^^^^^^^^^
+.. automodule:: mmpose.structures.bbox
+ :members:
+
+keypoint
+^^^^^^^^^^^
+.. automodule:: mmpose.structures.keypoint
+ :members:
+
+
+mmpose.registry
+---------------
+.. automodule:: mmpose.registry
+ :members:
+
+mmpose.evaluation
+-----------------
+metrics
+^^^^^^^^^^^
+.. automodule:: mmpose.evaluation.metrics
+ :members:
+
+functional
+^^^^^^^^^^^
+.. automodule:: mmpose.evaluation.functional
+ :members:
+
+mmpose.visualization
+--------------------
+.. automodule:: mmpose.visualization
+ :members:
+
+mmpose.engine
+---------------
+hooks
+^^^^^^^^^^^
+.. automodule:: mmpose.engine.hooks
+ :members:
diff --git a/docs/zh_cn/collect_modelzoo.py b/docs/zh_cn/collect_modelzoo.py
new file mode 100644
index 0000000000000000000000000000000000000000..0c87d3c6ef6d173772f3dc1d3753f4ad25235fd2
--- /dev/null
+++ b/docs/zh_cn/collect_modelzoo.py
@@ -0,0 +1,196 @@
+#!/usr/bin/env python
+# Copyright (c) OpenMMLab. All rights reserved.
+import os
+import os.path as osp
+import re
+from collections import defaultdict
+from glob import glob
+
+from addict import Addict
+from titlecase import titlecase
+
+
+def _get_model_docs():
+ """Get all model document files.
+
+ Returns:
+ list[str]: file paths
+ """
+ config_root = osp.join('..', '..', 'configs')
+ pattern = osp.sep.join(['*'] * 4) + '.md'
+ docs = glob(osp.join(config_root, pattern))
+ docs = [doc for doc in docs if '_base_' not in doc]
+ return docs
+
+
+def _parse_model_doc_path(path):
+ """Parse doc file path.
+
+ Typical path would be like:
+
+ configs/
+', '
', '', f'## {titlecase(dataset)} Dataset', + '' + ] + + for keywords, doc in keywords_dict.items(): + keyword_strs = [ + titlecase(x.replace('_', ' ')) for x in keywords + ] + dataset_str = titlecase(dataset) + if dataset_str in keyword_strs: + keyword_strs.remove(dataset_str) + + lines += [ + '
', '', + (f'### {" + ".join(keyword_strs)}' + f' on {dataset_str}'), '', doc['content'], '' + ] + + fn = osp.join('model_zoo', f'{task.replace(" ", "_").lower()}.md') + with open(fn, 'w', encoding='utf-8') as f: + f.write('\n'.join(lines)) + + # Write files by paper + paper_refs = _get_paper_refs() + + for paper_cat, paper_list in paper_refs.items(): + lines = [] + for paper_fn in paper_list: + paper_name, indicator = _parse_paper_ref(paper_fn) + paperlines = [] + for task, dataset_dict in model_docs.items(): + for dataset, keywords_dict in dataset_dict.items(): + for keywords, doc_info in keywords_dict.items(): + + if indicator not in doc_info['content']: + continue + + keyword_strs = [ + titlecase(x.replace('_', ' ')) for x in keywords + ] + + dataset_str = titlecase(dataset) + if dataset_str in keyword_strs: + keyword_strs.remove(dataset_str) + paperlines += [ + '
', '', + (f'### {" + ".join(keyword_strs)}' + f' on {dataset_str}'), '', doc_info['content'], '' + ] + if paperlines: + lines += ['
', '
', '', f'## {paper_name}', ''] + lines += paperlines + + if lines: + lines = [f'# {titlecase(paper_cat)}', ''] + lines + with open( + osp.join('model_zoo_papers', f'{paper_cat.lower()}.md'), + 'w', + encoding='utf-8') as f: + f.write('\n'.join(lines)) + + +if __name__ == '__main__': + print('collect model zoo documents') + main() diff --git a/docs/zh_cn/collect_projects.py b/docs/zh_cn/collect_projects.py new file mode 100644 index 0000000000000000000000000000000000000000..93562cb4b28410fe9e749d0332abe826f3243675 --- /dev/null +++ b/docs/zh_cn/collect_projects.py @@ -0,0 +1,119 @@ +#!/usr/bin/env python +# Copyright (c) OpenMMLab. All rights reserved. +import os +import os.path as osp +import re +from glob import glob + + +def _get_project_docs(): + """Get all project document files. + + Returns: + list[str]: file paths + """ + project_root = osp.join('..', '..', 'projects') + pattern = osp.sep.join(['*'] * 2) + '.md' + docs = glob(osp.join(project_root, pattern)) + docs = [ + doc for doc in docs + if 'example_project' not in doc and '_CN' not in doc + ] + return docs + + +def _parse_project_doc_path(fn): + """Get project name and banner from a project reference file. + + Returns: + tuple: + - project_name (str) + - project_banner (str) + """ + project_banner, project_name = None, None + with open(fn, 'r', encoding='utf-8') as f: + for line in f.readlines(): + if re.match('^( )*
', ' ' + banner, '
', '', '' + ] + + project_intro_doc = _get_project_intro_doc() + faq_doc = _get_faq_doc() + + with open( + osp.join('projects', 'community_projects.md'), 'w', + encoding='utf-8') as f: + f.write('# Projects of MMPose from Community Contributors\n') + f.write(''.join(project_intro_doc)) + f.write('\n'.join(project_lines)) + f.write(''.join(faq_doc)) + + +if __name__ == '__main__': + print('collect project documents') + main() diff --git a/docs/zh_cn/conf.py b/docs/zh_cn/conf.py new file mode 100644 index 0000000000000000000000000000000000000000..c82b9edc046d1d03a093629653021231053ba354 --- /dev/null +++ b/docs/zh_cn/conf.py @@ -0,0 +1,108 @@ +# Copyright (c) OpenMMLab. All rights reserved. +# Configuration file for the Sphinx documentation builder. +# +# This file only contains a selection of the most common options. For a full +# list see the documentation: +# https://www.sphinx-doc.org/en/master/usage/configuration.html + +# -- Path setup -------------------------------------------------------------- + +# If extensions (or modules to document with autodoc) are in another directory, +# add these directories to sys.path here. If the directory is relative to the +# documentation root, use os.path.abspath to make it absolute, like shown here. + +import os +import subprocess +import sys + +import pytorch_sphinx_theme + +sys.path.insert(0, os.path.abspath('../..')) + +# -- Project information ----------------------------------------------------- + +project = 'MMPose' +copyright = '2020-2021, OpenMMLab' +author = 'MMPose Authors' + +# The full version, including alpha/beta/rc tags +version_file = '../../mmpose/version.py' + + +def get_version(): + with open(version_file, 'r') as f: + exec(compile(f.read(), version_file, 'exec')) + return locals()['__version__'] + + +release = get_version() + +# -- General configuration --------------------------------------------------- + +# Add any Sphinx extension module names here, as strings. They can be +# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom +# ones. +extensions = [ + 'sphinx.ext.autodoc', 'sphinx.ext.napoleon', 'sphinx.ext.viewcode', + 'sphinx_markdown_tables', 'sphinx_copybutton', 'myst_parser', + 'sphinx.ext.autosummary' +] + +autodoc_mock_imports = ['json_tricks', 'mmpose.version'] + +# Ignore >>> when copying code +copybutton_prompt_text = r'>>> |\.\.\. ' +copybutton_prompt_is_regexp = True + +# Add any paths that contain templates here, relative to this directory. +templates_path = ['_templates'] + +# List of patterns, relative to source directory, that match files and +# directories to ignore when looking for source files. +# This pattern also affects html_static_path and html_extra_path. +exclude_patterns = ['_build', 'Thumbs.db', '.DS_Store'] + +# -- Options for HTML output ------------------------------------------------- +source_suffix = { + '.rst': 'restructuredtext', + '.md': 'markdown', +} + +# The theme to use for HTML and HTML Help pages. See the documentation for +# a list of builtin themes. +# +html_theme = 'pytorch_sphinx_theme' +html_theme_path = [pytorch_sphinx_theme.get_html_theme_path()] +html_theme_options = { + 'menu': [{ + 'name': 'GitHub', + 'url': 'https://github.com/open-mmlab/mmpose' + }], + # Specify the language of the shared menu + 'menu_lang': 'cn' +} + +# Add any paths that contain custom static files (such as style sheets) here, +# relative to this directory. They are copied after the builtin static files, +# so a file named "default.css" will overwrite the builtin "default.css". + +language = 'zh_CN' + +html_static_path = ['_static'] +html_css_files = ['css/readthedocs.css'] + +# Enable ::: for my_st +myst_enable_extensions = ['colon_fence'] + +master_doc = 'index' + + +def builder_inited_handler(app): + subprocess.run(['python', './collect_modelzoo.py']) + subprocess.run(['python', './collect_projects.py']) + subprocess.run(['sh', './merge_docs.sh']) + subprocess.run(['python', './stats.py']) + + +def setup(app): + app.connect('builder-inited', builder_inited_handler) diff --git a/docs/zh_cn/contribution_guide.md b/docs/zh_cn/contribution_guide.md new file mode 100644 index 0000000000000000000000000000000000000000..96be7d17232c86d3ba0ef4c2ecb08eaebe989569 --- /dev/null +++ b/docs/zh_cn/contribution_guide.md @@ -0,0 +1,207 @@ +# 如何给 MMPose 贡献代码 + +欢迎加入 MMPose 社区,我们致力于打造最前沿的计算机视觉基础库,我们欢迎任何形式的贡献,包括但不限于: + +- **修复错误** + 1. 如果提交的代码改动较大,我们鼓励你先开一个 issue 并正确描述现象、原因和复现方式,讨论后确认修复方案。 + 2. 修复错误并补充相应的单元测试,提交 PR 。 +- **新增功能或组件** + 1. 如果新功能或模块涉及较大的代码改动,我们建议先提交 issue,与我们确认功能的必要性。 + 2. 实现新增功能并添加单元测试,提交 PR 。 +- **文档补充或翻译** + - 如果发现文档有错误或不完善的地方,欢迎直接提交 PR 。 + +```{note} +- 如果你希望向 MMPose 1.0 贡献代码,请从 dev-1.x 上创建新分支,并提交 PR 到 dev-1.x 分支上。 +- 如果你是论文作者,并希望将你的方法加入到 MMPose 中,欢迎联系我们,我们将非常感谢你的贡献。 +- 如果你希望尽快将你的项目分享到 MMPose 开源社区,欢迎将 PR 提到 Projects 目录下,该目录下的项目将简化 Review 流程并尽快合入。 +- 如果你希望加入 MMPose 的维护者,欢迎联系我们,我们将邀请你加入 MMPose 的维护者群。 +``` + +## 准备工作 + +PR 操作所使用的命令都是用 Git 去实现的,该章节将介绍如何进行 Git 配置与 GitHub 绑定。 + +### Git 配置 + +首先,你需要在本地安装 Git,然后配置你的 Git 用户名和邮箱: + +```Shell +# 在命令提示符(cmd)或终端(terminal)中输入以下命令,查看 Git 版本 +git --version +``` + +然后,你需要检查自己的 Git Config 是否正确配置,如果 `user.name` 和 `user.email` 为空,你需要配置你的 Git 用户名和邮箱: + +```Shell +# 在命令提示符(cmd)或终端(terminal)中输入以下命令,查看 Git 配置 +git config --global --list +# 设置 Git 用户名和邮箱 +git config --global user.name "这里填入你的用户名" +git config --global user.email "这里填入你的邮箱" +``` + +## PR 流程 + +如果你对 PR 流程不熟悉,接下来将会从零开始,一步一步地教你如何提交 PR。如果你想深入了解 PR 开发模式,可以参考 [GitHub 官方文档](https://docs.github.com/cn/github/collaborating-with-issues-and-pull-requests/about-pull-requests)。 + +### 1. Fork 项目 + +当你第一次提交 PR 时,需要先 Fork 项目到自己的 GitHub 账号下。点击项目右上角的 Fork 按钮,将项目 Fork 到自己的 GitHub 账号下。 + + + +接着,你需要将你的 Fork 仓库 Clone 到本地,然后添加官方仓库作为远程仓库: + +```Shell + +# Clone 你的 Fork 仓库到本地 +git clone https://github.com/username/mmpose.git + +# 添加官方仓库作为远程仓库 +cd mmpose +git remote add upstream https://github.com/open-mmlab/mmpose.git +``` + +在终端中输入以下命令,查看远程仓库是否成功添加: + +```Shell +git remote -v +``` + +如果出现以下信息,说明你已经成功添加了远程仓库: + +```Shell +origin https://github.com/{username}/mmpose.git (fetch) +origin https://github.com/{username}/mmpose.git (push) +upstream https://github.com/open-mmlab/mmpose.git (fetch) +upstream https://github.com/open-mmlab/mmpose.git (push) +``` + +```{note} +这里对 origin 和 upstream 进行一个简单的介绍,当我们使用 git clone 来克隆代码时,会默认创建一个 origin 的 remote,它指向我们克隆的代码库地址,而 upstream 则是我们自己添加的,用来指向原始代码库地址。当然如果你不喜欢他叫 upstream,也可以自己修改,比如叫 open-mmlab。我们通常向 origin 提交代码(即 fork 下来的远程仓库),然后向 upstream 提交一个 pull request。如果提交的代码和最新的代码发生冲突,再从 upstream 拉取最新的代码,和本地分支解决冲突,再提交到 origin。 +``` + +### 2. 配置 pre-commit + +在本地开发环境中,我们使用 pre-commit 来检查代码风格,以确保代码风格的统一。在提交代码前,你需要先安装 pre-commit: + +```Shell +pip install -U pre-commit + +# 在 mmpose 根目录下安装 pre-commit +pre-commit install +``` + +检查 pre-commit 是否配置成功,并安装 `.pre-commit-config.yaml` 中的钩子: + +```Shell +pre-commit run --all-files +``` + + + +```{note} +如果你是中国大陆用户,由于网络原因,可能会出现 pre-commit 安装失败的情况。 + +这时你可以使用清华源来安装 pre-commit: +pip install -U pre-commit -i https://pypi.tuna.tsinghua.edu.cn/simple + +或者使用国内镜像来安装 pre-commit: +pip install -U pre-commit -i https://pypi.mirrors.ustc.edu.cn/simple +``` + +如果安装过程被中断,可以重复执行上述命令,直到安装成功。 + +如果你提交的代码中有不符合规范的地方,pre-commit 会发出警告,并自动修复部分错误。 + + + +### 3. 创建开发分支 + +安装完 pre-commit 之后,我们需要基于 dev 分支创建一个新的开发分支,建议以 `username/pr_name` 的形式命名,例如: + +```Shell +git checkout -b username/refactor_contributing_doc +``` + +在后续的开发中,如果本地仓库的 dev 分支落后于官方仓库的 dev 分支,需要先拉取 upstream 的 dev 分支,然后 rebase 到本地的开发分支上: + +```Shell +git checkout username/refactor_contributing_doc +git fetch upstream +git rebase upstream/dev-1.x +``` + +在 rebase 时,如果出现冲突,需要手动解决冲突,然后执行 `git add` 命令,再执行 `git rebase --continue` 命令,直到 rebase 完成。 + +### 4. 提交代码并在本地通过单元测试 + +在本地开发完成后,我们需要在本地通过单元测试,然后提交代码。 + +```shell +# 运行单元测试 +pytest tests/ + +# 提交代码 +git add . +git commit -m "commit message" +``` + +### 5. 推送代码到远程仓库 + +在本地开发完成后,我们需要将代码推送到远程仓库。 + +```Shell +git push origin username/refactor_contributing_doc +``` + +### 6. 提交 Pull Request (PR) + +#### (1) 在 GitHub 上创建 PR + + + +#### (2) 在 PR 中根据指引修改描述,添加必要的信息 + + + +```{note} +- 在 PR branch 左侧选择 `dev` 分支,否则 PR 会被拒绝。 +- 如果你是第一次向 OpenMMLab 提交 PR,需要签署 CLA。 +``` + + + +## 代码风格 + +### Python + +我们采用[PEP8](https://www.python.org/dev/peps/pep-0008/)作为代码风格。 + +使用下面的工具来对代码进行整理和格式化: + +- [flake8](http://flake8.pycqa.org/en/latest/):代码提示 +- [isort](https://github.com/timothycrosley/isort):import 排序 +- [yapf](https://github.com/google/yapf):格式化工具 +- [codespell](https://github.com/codespell-project/codespell): 单词拼写检查 +- [mdformat](https://github.com/executablebooks/mdformat): markdown 文件格式化工具 +- [docformatter](https://github.com/myint/docformatter): docstring 格式化工具 + +`yapf`和`isort`的样式配置可以在[setup.cfg](/setup.cfg)中找到。 + +我们使用[pre-commit hook](https://pre-commit.com/)来: + +- 检查和格式化 `flake8`、`yapf`、`isort`、`trailing whitespaces` +- 修复 `end-of-files` +- 在每次提交时自动排序 `requirments.txt` + +`pre-commit`的配置存储在[.pre-commit-config](/.pre-commit-config.yaml)中。 + +```{note} +在你创建PR之前,请确保你的代码格式符合规范,且经过了 yapf 格式化。 +``` + +### C++与CUDA + +遵循[Google C++风格指南](https://google.github.io/styleguide/cppguide.html) diff --git a/docs/zh_cn/dataset_zoo/2d_animal_keypoint.md b/docs/zh_cn/dataset_zoo/2d_animal_keypoint.md new file mode 100644 index 0000000000000000000000000000000000000000..28b0b726b40b003bef31f213f48e20c29b9ab4eb --- /dev/null +++ b/docs/zh_cn/dataset_zoo/2d_animal_keypoint.md @@ -0,0 +1,545 @@ +# 2D Animal Keypoint Dataset + +It is recommended to symlink the dataset root to `$MMPOSE/data`. +If your folder structure is different, you may need to change the corresponding paths in config files. + +MMPose supported datasets: + +- [Animal-Pose](#animal-pose) \[ [Homepage](https://sites.google.com/view/animal-pose/) \] +- [AP-10K](#ap-10k) \[ [Homepage](https://github.com/AlexTheBad/AP-10K/) \] +- [Horse-10](#horse-10) \[ [Homepage](http://www.mackenziemathislab.org/horse10) \] +- [MacaquePose](#macaquepose) \[ [Homepage](http://www.pri.kyoto-u.ac.jp/datasets/macaquepose/index.html) \] +- [Vinegar Fly](#vinegar-fly) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [Desert Locust](#desert-locust) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [Grévy’s Zebra](#grvys-zebra) \[ [Homepage](https://github.com/jgraving/DeepPoseKit-Data) \] +- [ATRW](#atrw) \[ [Homepage](https://cvwc2019.github.io/challenge.html) \] +- [Animal Kingdom](#Animal-Kindom) \[ [Homepage](https://openaccess.thecvf.com/content/CVPR2022/html/Ng_Animal_Kingdom_A_Large_and_Diverse_Dataset_for_Animal_Behavior_CVPR_2022_paper.html) \] + +## Animal-Pose + + + +
+
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
+
+
+For [Animal-Pose](https://sites.google.com/view/animal-pose/) dataset, we prepare the dataset as follows:
+
+1. Download the images of [PASCAL VOC2012](http://host.robots.ox.ac.uk/pascal/VOC/voc2012/#data), especially the five categories (dog, cat, sheep, cow, horse), which we use as trainval dataset.
+2. Download the [test-set](https://drive.google.com/drive/folders/1DwhQobZlGntOXxdm7vQsE4bqbFmN3b9y?usp=sharing) images with raw annotations (1000 images, 5 categories).
+3. We have pre-processed the annotations to make it compatible with MMPose. Please download the annotation files from [annotations](https://download.openmmlab.com/mmpose/datasets/animalpose_annotations.tar). If you would like to generate the annotations by yourself, please check our dataset parsing [codes](/tools/dataset_converters/parse_animalpose_dataset.py).
+
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── animalpose
+ │
+ │-- VOC2012
+ │ │-- Annotations
+ │ │-- ImageSets
+ │ │-- JPEGImages
+ │ │-- SegmentationClass
+ │ │-- SegmentationObject
+ │
+ │-- animalpose_image_part2
+ │ │-- cat
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annotations
+ │ │-- animalpose_train.json
+ │ |-- animalpose_val.json
+ │ |-- animalpose_trainval.json
+ │ │-- animalpose_test.json
+ │
+ │-- PASCAL2011_animal_annotation
+ │ │-- cat
+ │ │ |-- 2007_000528_1.xml
+ │ │ |-- 2007_000549_1.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annimalpose_anno2
+ │ │-- cat
+ │ │ |-- ca1.xml
+ │ │ |-- ca2.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+
+```
+
+The official dataset does not provide the official train/val/test set split.
+We choose the images from PascalVOC for train & val. In total, we have 3608 images and 5117 annotations for train+val, where
+2798 images with 4000 annotations are used for training, and 810 images with 1117 annotations are used for validation.
+Those images from other sources (1000 images with 1000 annotations) are used for testing.
+
+## AP-10K
+
+
+
+
+
+
+
+AP-10K (NeurIPS'2021)
+ +```bibtex +@misc{yu2021ap10k, + title={AP-10K: A Benchmark for Animal Pose Estimation in the Wild}, + author={Hang Yu and Yufei Xu and Jing Zhang and Wei Zhao and Ziyu Guan and Dacheng Tao}, + year={2021}, + eprint={2108.12617}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+For [AP-10K](https://github.com/AlexTheBad/AP-10K/) dataset, images and annotations can be downloaded from [download](https://drive.google.com/file/d/1-FNNGcdtAQRehYYkGY1y4wzFNg4iWNad/view?usp=sharing).
+Note, this data and annotation data is for non-commercial use only.
+
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ap10k
+ │-- annotations
+ │ │-- ap10k-train-split1.json
+ │ |-- ap10k-train-split2.json
+ │ |-- ap10k-train-split3.json
+ │ │-- ap10k-val-split1.json
+ │ |-- ap10k-val-split2.json
+ │ |-- ap10k-val-split3.json
+ │ |-- ap10k-test-split1.json
+ │ |-- ap10k-test-split2.json
+ │ |-- ap10k-test-split3.json
+ │-- data
+ │ │-- 000000000001.jpg
+ │ │-- 000000000002.jpg
+ │ │-- ...
+
+```
+
+The annotation files in 'annotation' folder contains 50 labeled animal species. There are total 10,015 labeled images with 13,028 instances in the AP-10K dataset. We randonly split them into train, val, and test set following the ratio of 7:1:2.
+
+## Horse-10
+
+
+
+
+
+
+
+Horse-10 (WACV'2021)
+ +```bibtex +@inproceedings{mathis2021pretraining, + title={Pretraining boosts out-of-domain robustness for pose estimation}, + author={Mathis, Alexander and Biasi, Thomas and Schneider, Steffen and Yuksekgonul, Mert and Rogers, Byron and Bethge, Matthias and Mathis, Mackenzie W}, + booktitle={Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision}, + pages={1859--1868}, + year={2021} +} +``` + +
+
+
+
+For [Horse-10](http://www.mackenziemathislab.org/horse10) dataset, images can be downloaded from [download](http://www.mackenziemathislab.org/horse10).
+Please download the annotation files from [horse10_annotations](https://download.openmmlab.com/mmpose/datasets/horse10_annotations.tar). Note, this data and annotation data is for non-commercial use only, per the authors (see http://horse10.deeplabcut.org for more information).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── horse10
+ │-- annotations
+ │ │-- horse10-train-split1.json
+ │ |-- horse10-train-split2.json
+ │ |-- horse10-train-split3.json
+ │ │-- horse10-test-split1.json
+ │ |-- horse10-test-split2.json
+ │ |-- horse10-test-split3.json
+ │-- labeled-data
+ │ │-- BrownHorseinShadow
+ │ │-- BrownHorseintoshadow
+ │ │-- ...
+
+```
+
+## MacaquePose
+
+
+
+
+
+
+
+MacaquePose (bioRxiv'2020)
+ +```bibtex +@article{labuguen2020macaquepose, + title={MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture}, + author={Labuguen, Rollyn and Matsumoto, Jumpei and Negrete, Salvador and Nishimaru, Hiroshi and Nishijo, Hisao and Takada, Masahiko and Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro}, + journal={bioRxiv}, + year={2020}, + publisher={Cold Spring Harbor Laboratory} +} +``` + +
+
+
+
+For [MacaquePose](http://www.pri.kyoto-u.ac.jp/datasets/macaquepose/index.html) dataset, images can be downloaded from [download](http://www.pri.kyoto-u.ac.jp/datasets/macaquepose/index.html).
+Please download the annotation files from [macaque_annotations](https://download.openmmlab.com/mmpose/datasets/macaque_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── macaque
+ │-- annotations
+ │ │-- macaque_train.json
+ │ |-- macaque_test.json
+ │-- images
+ │ │-- 01418849d54b3005.jpg
+ │ │-- 0142d1d1a6904a70.jpg
+ │ │-- 01ef2c4c260321b7.jpg
+ │ │-- 020a1c75c8c85238.jpg
+ │ │-- 020b1506eef2557d.jpg
+ │ │-- ...
+
+```
+
+Since the official dataset does not provide the test set, we randomly select 12500 images for training, and the rest for evaluation (see [code](/tools/dataset/parse_macaquepose_dataset.py)).
+
+## Vinegar Fly
+
+
+
+
+
+
+
+Vinegar Fly (Nature Methods'2019)
+ +```bibtex +@article{pereira2019fast, + title={Fast animal pose estimation using deep neural networks}, + author={Pereira, Talmo D and Aldarondo, Diego E and Willmore, Lindsay and Kislin, Mikhail and Wang, Samuel S-H and Murthy, Mala and Shaevitz, Joshua W}, + journal={Nature methods}, + volume={16}, + number={1}, + pages={117--125}, + year={2019}, + publisher={Nature Publishing Group} +} +``` + +
+
+
+
+For [Vinegar Fly](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [vinegar_fly_images](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_images.tar).
+Please download the annotation files from [vinegar_fly_annotations](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── fly
+ │-- annotations
+ │ │-- fly_train.json
+ │ |-- fly_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## Desert Locust
+
+
+
+
+
+
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
+
+For [Desert Locust](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [locust_images](https://download.openmmlab.com/mmpose/datasets/locust_images.tar).
+Please download the annotation files from [locust_annotations](https://download.openmmlab.com/mmpose/datasets/locust_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── locust
+ │-- annotations
+ │ │-- locust_train.json
+ │ |-- locust_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## Grévy’s Zebra
+
+
+
+
+
+
+
+Grévy’s Zebra (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
+
+For [Grévy’s Zebra](https://github.com/jgraving/DeepPoseKit-Data) dataset, images can be downloaded from [zebra_images](https://download.openmmlab.com/mmpose/datasets/zebra_images.tar).
+Please download the annotation files from [zebra_annotations](https://download.openmmlab.com/mmpose/datasets/zebra_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── zebra
+ │-- annotations
+ │ │-- zebra_train.json
+ │ |-- zebra_test.json
+ │-- images
+ │ │-- 0.jpg
+ │ │-- 1.jpg
+ │ │-- 2.jpg
+ │ │-- 3.jpg
+ │ │-- ...
+
+```
+
+Since the official dataset does not provide the test set, we randomly select 90% images for training, and the rest (10%) for evaluation (see [code](/tools/dataset_converters/parse_deepposekit_dataset.py)).
+
+## ATRW
+
+
+
+
+
+
+
+ATRW (ACM MM'2020)
+ +```bibtex +@inproceedings{li2020atrw, + title={ATRW: A Benchmark for Amur Tiger Re-identification in the Wild}, + author={Li, Shuyuan and Li, Jianguo and Tang, Hanlin and Qian, Rui and Lin, Weiyao}, + booktitle={Proceedings of the 28th ACM International Conference on Multimedia}, + pages={2590--2598}, + year={2020} +} +``` + +
+
+
+
+ATRW captures images of the Amur tiger (also known as Siberian tiger, Northeast-China tiger) in the wild.
+For [ATRW](https://cvwc2019.github.io/challenge.html) dataset, please download images from
+[Pose_train](https://lilablobssc.blob.core.windows.net/cvwc2019/train/atrw_pose_train.tar.gz),
+[Pose_val](https://lilablobssc.blob.core.windows.net/cvwc2019/train/atrw_pose_val.tar.gz), and
+[Pose_test](https://lilablobssc.blob.core.windows.net/cvwc2019/test/atrw_pose_test.tar.gz).
+Note that in the ATRW official annotation files, the key "file_name" is written as "filename". To make it compatible with
+other coco-type json files, we have modified this key.
+Please download the modified annotation files from [atrw_annotations](https://download.openmmlab.com/mmpose/datasets/atrw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── atrw
+ │-- annotations
+ │ │-- keypoint_train.json
+ │ │-- keypoint_val.json
+ │ │-- keypoint_trainval.json
+ │-- images
+ │ │-- train
+ │ │ │-- 000002.jpg
+ │ │ │-- 000003.jpg
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000001.jpg
+ │ │ │-- 000013.jpg
+ │ │ │-- ...
+ │ │-- test
+ │ │ │-- 000000.jpg
+ │ │ │-- 000004.jpg
+ │ │ │-- ...
+
+```
+
+## Animal Kingdom
+
+
+
+
+
+
+
+```bibtex
+@inproceedings{Ng_2022_CVPR,
+ author = {Ng, Xun Long and Ong, Kian Eng and Zheng, Qichen and Ni, Yun and Yeo, Si Yong and Liu, Jun},
+ title = {Animal Kingdom: A Large and Diverse Dataset for Animal Behavior Understanding},
+ booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
+ month = {June},
+ year = {2022},
+ pages = {19023-19034}
+ }
+```
+
+For [Animal Kingdom](https://github.com/sutdcv/Animal-Kingdom) dataset, images can be downloaded from [here](https://forms.office.com/pages/responsepage.aspx?id=drd2NJDpck-5UGJImDFiPVRYpnTEMixKqPJ1FxwK6VZUQkNTSkRISTNORUI2TDBWMUpZTlQ5WUlaSyQlQCN0PWcu).
+Please Extract dataset under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ak
+ |--annotations
+ │ │-- ak_P1
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P2
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_amphibian
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_bird
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_fish
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_mammal
+ │ │ │-- train.json
+ │ │ │-- test.json
+ │ │-- ak_P3_reptile
+ │ │-- train.json
+ │ │-- test.json
+ │-- images
+ │ │-- AAACXZTV
+ │ │ │--AAACXZTV_f000059.jpg
+ │ │ │--...
+ │ │-- AAAUILHH
+ │ │ │--AAAUILHH_f000098.jpg
+ │ │ │--...
+ │ │-- ...
+```
diff --git a/docs/zh_cn/dataset_zoo/2d_body_keypoint.md b/docs/zh_cn/dataset_zoo/2d_body_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..4b24b5a7fe3bb8590bfdc3648b6e597a14e9897f
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/2d_body_keypoint.md
@@ -0,0 +1,636 @@
+# 2D 人体关键点数据集
+
+建议将数据集的根目录链接到 `$MMPOSE/data`。
+如果你的文件夹结构不同,你可能需要在配置文件中更改相应的路径。
+
+MMPose 支持的数据集:
+
+- Images
+ - [COCO](#coco) \[ [主页](http://cocodataset.org/) \]
+ - [MPII](#mpii) \[ [主页](http://human-pose.mpi-inf.mpg.de/) \]
+ - [MPII-TRB](#mpii-trb) \[ [主页](https://github.com/kennymckormick/Triplet-Representation-of-human-Body) \]
+ - [AI Challenger](#aic) \[ [主页](https://github.com/AIChallenger/AI_Challenger_2017) \]
+ - [CrowdPose](#crowdpose) \[ [主页](https://github.com/Jeff-sjtu/CrowdPose) \]
+ - [OCHuman](#ochuman) \[ [主页](https://github.com/liruilong940607/OCHumanApi) \]
+ - [MHP](#mhp) \[ [主页](https://lv-mhp.github.io/dataset) \]
+ - [Human-Art](#humanart) \[ [主页](https://idea-research.github.io/HumanArt/) \]
+ - [ExLPose](#exlpose-dataset) \[ [Homepage](http://cg.postech.ac.kr/research/ExLPose/) \]
+- Videos
+ - [PoseTrack18](#posetrack18) \[ [主页](https://posetrack.net/users/download.php) \]
+ - [sub-JHMDB](#sub-jhmdb-dataset) \[ [主页](http://jhmdb.is.tue.mpg.de/dataset) \]
+
+## COCO
+
+
+
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+
+对于 [COCO](http://cocodataset.org/) 数据,请从 [COCO 下载](http://cocodataset.org/#download) 中下载,需要 2017 训练/验证集进行 COCO 关键点的训练和验证。
+[HRNet-Human-Pose-Estimation](https://github.com/HRNet/HRNet-Human-Pose-Estimation) 提供了 COCO val2017 的人体检测结果,以便重现我们的多人姿态估计结果。
+请从 [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) 或 [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing) 下载。
+如果要在 COCO'2017 test-dev 上进行评估,请下载 [image-info](https://download.openmmlab.com/mmpose/datasets/person_keypoints_test-dev-2017.json)。
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- person_keypoints_train2017.json
+ │ |-- person_keypoints_val2017.json
+ │ |-- person_keypoints_test-dev-2017.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ | |-- COCO_test-dev2017_detections_AP_H_609_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+## MPII
+
+
+
+
+
+
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+
+对于 [MPII](http://human-pose.mpi-inf.mpg.de/) 数据,请从 [MPII Human Pose Dataset](http://human-pose.mpi-inf.mpg.de/) 下载。
+我们已将原始的注释文件转换为 json 格式,请从 [mpii_annotations](https://download.openmmlab.com/mmpose/datasets/mpii_annotations.tar) 下载。
+请将它们解压到 {MMPose}/data 下,并确保目录结构如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mpii
+ |── annotations
+ | |── mpii_gt_val.mat
+ | |── mpii_test.json
+ | |── mpii_train.json
+ | |── mpii_trainval.json
+ | `── mpii_val.json
+ `── images
+ |── 000001163.jpg
+ |── 000003072.jpg
+
+```
+
+在训练和推理期间,默认情况下,预测结果将以 '.mat' 格式保存。我们还提供了一个工具,以将这个 '.mat' 转换为更易读的 '.json' 格式。
+
+```shell
+python tools/dataset/mat2json ${PRED_MAT_FILE} ${GT_JSON_FILE} ${OUTPUT_PRED_JSON_FILE}
+```
+
+例如,
+
+```shell
+python tools/dataset/mat2json work_dirs/res50_mpii_256x256/pred.mat data/mpii/annotations/mpii_val.json pred.json
+```
+
+## MPII-TRB
+
+
+
+
+
+
+
+MPII-TRB (ICCV'2019)
+ +```bibtex +@inproceedings{duan2019trb, + title={TRB: A Novel Triplet Representation for Understanding 2D Human Body}, + author={Duan, Haodong and Lin, Kwan-Yee and Jin, Sheng and Liu, Wentao and Qian, Chen and Ouyang, Wanli}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={9479--9488}, + year={2019} +} +``` + +
+
+
+
+对于 [MPII-TRB](https://github.com/kennymckormick/Triplet-Representation-of-human-Body) 数据,请从 [MPII Human Pose Dataset](http://human-pose.mpi-inf.mpg.de/) 下载。
+请从 [mpii_trb_annotations](https://download.openmmlab.com/mmpose/datasets/mpii_trb_annotations.tar) 下载注释文件。
+将它们解压到 {MMPose}/data 下,并确保它们的结构如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mpii
+ |── annotations
+ | |── mpii_trb_train.json
+ | |── mpii_trb_val.json
+ `── images
+ |── 000001163.jpg
+ |── 000003072.jpg
+
+```
+
+## AIC
+
+
+
+
+
+
+
+AI Challenger (ArXiv'2017)
+ +```bibtex +@article{wu2017ai, + title={Ai challenger: A large-scale dataset for going deeper in image understanding}, + author={Wu, Jiahong and Zheng, He and Zhao, Bo and Li, Yixin and Yan, Baoming and Liang, Rui and Wang, Wenjia and Zhou, Shipei and Lin, Guosen and Fu, Yanwei and others}, + journal={arXiv preprint arXiv:1711.06475}, + year={2017} +} +``` + +
+
+
+
+对于 [AIC](https://github.com/AIChallenger/AI_Challenger_2017) 数据,请从 [AI Challenger 2017](https://github.com/AIChallenger/AI_Challenger_2017) 下载。其中 2017 Train/Val 数据适用于关键点的训练和验证。
+请从 [aic_annotations](https://download.openmmlab.com/mmpose/datasets/aic_annotations.tar) 下载注释文件。
+下载并解压到 $MMPOSE/data 下,并确保它们的结构如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── aic
+ │-- annotations
+ │ │-- aic_train.json
+ │ |-- aic_val.json
+ │-- ai_challenger_keypoint_train_20170902
+ │ │-- keypoint_train_images_20170902
+ │ │ │-- 0000252aea98840a550dac9a78c476ecb9f47ffa.jpg
+ │ │ │-- 000050f770985ac9653198495ef9b5c82435d49c.jpg
+ │ │ │-- ...
+ `-- ai_challenger_keypoint_validation_20170911
+ │-- keypoint_validation_images_20170911
+ │-- 0002605c53fb92109a3f2de4fc3ce06425c3b61f.jpg
+ │-- 0003b55a2c991223e6d8b4b820045bd49507bf6d.jpg
+ │-- ...
+```
+
+## CrowdPose
+
+
+
+
+
+
+
+CrowdPose (CVPR'2019)
+ +```bibtex +@article{li2018crowdpose, + title={CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark}, + author={Li, Jiefeng and Wang, Can and Zhu, Hao and Mao, Yihuan and Fang, Hao-Shu and Lu, Cewu}, + journal={arXiv preprint arXiv:1812.00324}, + year={2018} +} +``` + +
+
+
+
+对于 [CrowdPose](https://github.com/Jeff-sjtu/CrowdPose)数据,请从 [CrowdPose](https://github.com/Jeff-sjtu/CrowdPose) 下载。
+请下载标注文件和人体检测结果从 [crowdpose_annotations](https://download.openmmlab.com/mmpose/datasets/crowdpose_annotations.tar)。
+对于自上而下的方法,我们按照 [CrowdPose](https://arxiv.org/abs/1812.00324)使用[YOLOv3](https://github.com/eriklindernoren/PyTorch-YOLOv3) 的 [预训练权重](https://pjreddie.com/media/files/yolov3.weights) 来生成检测到的人体边界框。
+对于模型训练,我们按照 [HigherHRNet](https://github.com/HRNet/HigherHRNet-Human-Pose-Estimation) 在 CrowdPose 的训练/验证数据集上进行训练,并在 CrowdPose 测试数据集上评估模型。
+下载并解压缩它们到 $MMPOSE/data 目录下,结构应如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── crowdpose
+ │-- annotations
+ │ │-- mmpose_crowdpose_train.json
+ │ │-- mmpose_crowdpose_val.json
+ │ │-- mmpose_crowdpose_trainval.json
+ │ │-- mmpose_crowdpose_test.json
+ │ │-- det_for_crowd_test_0.1_0.5.json
+ │-- images
+ │-- 100000.jpg
+ │-- 100001.jpg
+ │-- 100002.jpg
+ │-- ...
+```
+
+## OCHuman
+
+
+
+
+
+
+
+OCHuman (CVPR'2019)
+ +```bibtex +@inproceedings{zhang2019pose2seg, + title={Pose2seg: Detection free human instance segmentation}, + author={Zhang, Song-Hai and Li, Ruilong and Dong, Xin and Rosin, Paul and Cai, Zixi and Han, Xi and Yang, Dingcheng and Huang, Haozhi and Hu, Shi-Min}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={889--898}, + year={2019} +} +``` + +
+
+
+
+对于 [OCHuman](https://github.com/liruilong940607/OCHumanApi) 数据,请从 [OCHuman](https://github.com/liruilong940607/OCHumanApi) 下载图像和标注。
+将它们移动到 $MMPOSE/data 目录下,结构应如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ochuman
+ │-- annotations
+ │ │-- ochuman_coco_format_val_range_0.00_1.00.json
+ │ |-- ochuman_coco_format_test_range_0.00_1.00.json
+ |-- images
+ │-- 000001.jpg
+ │-- 000002.jpg
+ │-- 000003.jpg
+ │-- ...
+
+```
+
+## MHP
+
+
+
+
+
+
+
+MHP (ACM MM'2018)
+ +```bibtex +@inproceedings{zhao2018understanding, + title={Understanding humans in crowded scenes: Deep nested adversarial learning and a new benchmark for multi-human parsing}, + author={Zhao, Jian and Li, Jianshu and Cheng, Yu and Sim, Terence and Yan, Shuicheng and Feng, Jiashi}, + booktitle={Proceedings of the 26th ACM international conference on Multimedia}, + pages={792--800}, + year={2018} +} +``` + +
+
+
+
+对于 [MHP](https://lv-mhp.github.io/dataset) 数据,请从 [MHP](https://lv-mhp.github.io/dataset) 下载。
+请从 [mhp_annotations](https://download.openmmlab.com/mmpose/datasets/mhp_annotations.tar.gz) 下载标注文件。
+请下载并解压到 $MMPOSE/data 目录下,并确保目录结构如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mhp
+ │-- annotations
+ │ │-- mhp_train.json
+ │ │-- mhp_val.json
+ │
+ `-- train
+ │ │-- images
+ │ │ │-- 1004.jpg
+ │ │ │-- 10050.jpg
+ │ │ │-- ...
+ │
+ `-- val
+ │ │-- images
+ │ │ │-- 10059.jpg
+ │ │ │-- 10068.jpg
+ │ │ │-- ...
+ │
+ `-- test
+ │ │-- images
+ │ │ │-- 1005.jpg
+ │ │ │-- 10052.jpg
+ │ │ │-- ...~~~~
+```
+
+## Human-Art dataset
+
+
+
+
+
+
+
+Human-Art (CVPR'2023)
+ +```bibtex +@inproceedings{ju2023humanart, + title={Human-Art: A Versatile Human-Centric Dataset Bridging Natural and Artificial Scenes}, + author={Ju, Xuan and Zeng, Ailing and Jianan, Wang and Qiang, Xu and Lei, Zhang}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), + year={2023}} +``` + +
+
+
+
+对于 [Human-Art](https://idea-research.github.io/HumanArt/) 数据,请从 [其网站](https://idea-research.github.io/HumanArt/) 下载图像和标注文件。
+您需要填写 [申请表](https://docs.google.com/forms/d/e/1FAIpQLScroT_jvw6B9U2Qca1_cl5Kmmu1ceKtlh6DJNmWLte8xNEhEw/viewform) 以获取数据访问权限。
+请将它们移动到 $MMPOSE/data 目录下,目录结构应如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+|── data
+ │── HumanArt
+ │-- images
+ │ │-- 2D_virtual_human
+ │ │ |-- cartoon
+ │ │ | |-- 000000000000.jpg
+ │ │ | |-- ...
+ │ │ |-- digital_art
+ │ │ |-- ...
+ │ |-- 3D_virtual_human
+ │ |-- real_human
+ |-- annotations
+ │ │-- validation_humanart.json
+ │ │-- training_humanart_coco.json
+ |-- person_detection_results
+ │ │-- HumanArt_validation_detections_AP_H_56_person.json
+```
+
+您可以选择是否下载 Human-Art 的其他标注文件。如果你想使用其他标注文件(例如,卡通的验证集),你需要在配置文件中编辑相应的代码。
+
+## ExLPose dataset
+
+
+
+
+
+
+
+ExLPose (2023)
+ +```bibtex +@inproceedings{ExLPose_2023_CVPR, + title={Human Pose Estimation in Extremely Low-Light Conditions}, + author={Sohyun Lee, Jaesung Rim, Boseung Jeong, Geonu Kim, ByungJu Woo, Haechan Lee, Sunghyun Cho, Suha Kwak}, + booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, + year={2023} +} +``` + +
+
+
+
+请从 [ExLPose](https://drive.google.com/drive/folders/1E0Is4_cShxvsbJlep_aNEYLJpmHzq9FL) 下载数据,将其移动到 $MMPOSE/data 目录下,并使其结构如下:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── ExLPose
+ │-- annotations
+ | |-- ExLPose
+ │ |-- ExLPose_train_LL.json
+ │ |-- ExLPose_test_LL-A.json
+ │ |-- ExLPose_test_LL-E.json
+ │ |-- ExLPose_test_LL-H.json
+ │ |-- ExLPose_test_LL-N.json
+ |-- dark
+ |--00001.png
+ |--00002.png
+ |--...
+
+```
+
+## PoseTrack18
+
+
+
+
+
+
+PoseTrack18 (CVPR'2018)
+ +```bibtex +@inproceedings{andriluka2018posetrack, + title={Posetrack: A benchmark for human pose estimation and tracking}, + author={Andriluka, Mykhaylo and Iqbal, Umar and Insafutdinov, Eldar and Pishchulin, Leonid and Milan, Anton and Gall, Juergen and Schiele, Bernt}, + booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, + pages={5167--5176}, + year={2018} +} +``` + +
+
+
+
+关于 [PoseTrack18](https://posetrack.net/users/download.php) 的数据,请从 [PoseTrack18](https://posetrack.net/users/download.php) 下载。
+请从 [posetrack18_annotations](https://download.openmmlab.com/mmpose/datasets/posetrack18_annotations.tar) 下载标注文件。
+我们已经将分散在各个视频中的官方标注文件合并为两个 json 文件(posetrack18_train & posetrack18_val.json)。我们还生成了 [mask 文件](https://download.openmmlab.com/mmpose/datasets/posetrack18_mask.tar) 以加速训练。
+对于自上而下的方法,我们使用 [MMDetection](https://github.com/open-mmlab/mmdetection) 预训练的 [Cascade R-CNN](https://download.openmmlab.com/mmdetection/v2.0/cascade_rcnn/cascade_rcnn_x101_64x4d_fpn_20e_coco/cascade_rcnn_x101_64x4d_fpn_20e_coco_20200509_224357-051557b1.pth)(X-101-64x4d-FPN)来生成检测到的人体边界框。
+请下载并将它们解压到 $MMPOSE/data 下,目录结构应如下所示:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── posetrack18
+ │-- annotations
+ │ │-- posetrack18_train.json
+ │ │-- posetrack18_val.json
+ │ │-- posetrack18_val_human_detections.json
+ │ │-- train
+ │ │ │-- 000001_bonn_train.json
+ │ │ │-- 000002_bonn_train.json
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000342_mpii_test.json
+ │ │ │-- 000522_mpii_test.json
+ │ │ │-- ...
+ │ `-- test
+ │ │-- 000001_mpiinew_test.json
+ │ │-- 000002_mpiinew_test.json
+ │ │-- ...
+ │
+ `-- images
+ │ │-- train
+ │ │ │-- 000001_bonn_train
+ │ │ │ │-- 000000.jpg
+ │ │ │ │-- 000001.jpg
+ │ │ │ │-- ...
+ │ │ │-- ...
+ │ │-- val
+ │ │ │-- 000342_mpii_test
+ │ │ │ │-- 000000.jpg
+ │ │ │ │-- 000001.jpg
+ │ │ │ │-- ...
+ │ │ │-- ...
+ │ `-- test
+ │ │-- 000001_mpiinew_test
+ │ │ │-- 000000.jpg
+ │ │ │-- 000001.jpg
+ │ │ │-- ...
+ │ │-- ...
+ `-- mask
+ │-- train
+ │ │-- 000002_bonn_train
+ │ │ │-- 000000.jpg
+ │ │ │-- 000001.jpg
+ │ │ │-- ...
+ │ │-- ...
+ `-- val
+ │-- 000522_mpii_test
+ │ │-- 000000.jpg
+ │ │-- 000001.jpg
+ │ │-- ...
+ │-- ...
+```
+
+官方的 PoseTrack 评估工具可以使用以下命令安装。
+
+```shell
+pip install git+https://github.com/svenkreiss/poseval.git
+```
+
+## sub-JHMDB dataset
+
+
+
+
+
+
+
+RSN (ECCV'2020)
+ +```bibtex +@misc{cai2020learning, + title={Learning Delicate Local Representations for Multi-Person Pose Estimation}, + author={Yuanhao Cai and Zhicheng Wang and Zhengxiong Luo and Binyi Yin and Angang Du and Haoqian Wang and Xinyu Zhou and Erjin Zhou and Xiangyu Zhang and Jian Sun}, + year={2020}, + eprint={2003.04030}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +
+
+
+
+对于 [sub-JHMDB](http://jhmdb.is.tue.mpg.de/dataset) 的数据,请从 [JHMDB](http://jhmdb.is.tue.mpg.de/dataset) 下载 [图像](<(http://files.is.tue.mpg.de/jhmdb/Rename_Images.tar.gz)>),
+请从 [jhmdb_annotations](https://download.openmmlab.com/mmpose/datasets/jhmdb_annotations.tar) 下载标注文件。
+将它们移至 $MMPOSE/data 下,并使目录结构如下所示:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── jhmdb
+ │-- annotations
+ │ │-- Sub1_train.json
+ │ |-- Sub1_test.json
+ │ │-- Sub2_train.json
+ │ |-- Sub2_test.json
+ │ │-- Sub3_train.json
+ │ |-- Sub3_test.json
+ |-- Rename_Images
+ │-- brush_hair
+ │ │--April_09_brush_hair_u_nm_np1_ba_goo_0
+ | │ │--00001.png
+ | │ │--00002.png
+ │-- catch
+ │-- ...
+
+```
diff --git a/docs/zh_cn/dataset_zoo/2d_face_keypoint.md b/docs/zh_cn/dataset_zoo/2d_face_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..62f66bd82b570cca481b0b1963c1b6b4a163d4b7
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/2d_face_keypoint.md
@@ -0,0 +1,384 @@
+# 2D Face Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [300W](#300w-dataset) \[ [Homepage](https://ibug.doc.ic.ac.uk/resources/300-W/) \]
+- [WFLW](#wflw-dataset) \[ [Homepage](https://wywu.github.io/projects/LAB/WFLW.html) \]
+- [AFLW](#aflw-dataset) \[ [Homepage](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/) \]
+- [COFW](#cofw-dataset) \[ [Homepage](http://www.vision.caltech.edu/xpburgos/ICCV13/) \]
+- [COCO-WholeBody-Face](#coco-wholebody-face) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+- [LaPa](#lapa-dataset) \[ [Homepage](https://github.com/JDAI-CV/lapa-dataset) \]
+
+## 300W Dataset
+
+
+
+
+
+
+
+300W (IMAVIS'2016)
+ +```bibtex +@article{sagonas2016300, + title={300 faces in-the-wild challenge: Database and results}, + author={Sagonas, Christos and Antonakos, Epameinondas and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja}, + journal={Image and vision computing}, + volume={47}, + pages={3--18}, + year={2016}, + publisher={Elsevier} +} +``` + +
+
+
+
+For 300W data, please download images from [300W Dataset](https://ibug.doc.ic.ac.uk/resources/300-W/).
+Please download the annotation files from [300w_annotations](https://download.openmmlab.com/mmpose/datasets/300w_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── 300w
+ |── annotations
+ | |── face_landmarks_300w_train.json
+ | |── face_landmarks_300w_valid.json
+ | |── face_landmarks_300w_valid_common.json
+ | |── face_landmarks_300w_valid_challenge.json
+ | |── face_landmarks_300w_test.json
+ `── images
+ |── afw
+ | |── 1051618982_1.jpg
+ | |── 111076519_1.jpg
+ | ...
+ |── helen
+ | |── trainset
+ | | |── 100032540_1.jpg
+ | | |── 100040721_1.jpg
+ | | ...
+ | |── testset
+ | | |── 296814969_3.jpg
+ | | |── 2968560214_1.jpg
+ | | ...
+ |── ibug
+ | |── image_003_1.jpg
+ | |── image_004_1.jpg
+ | ...
+ |── lfpw
+ | |── trainset
+ | | |── image_0001.png
+ | | |── image_0002.png
+ | | ...
+ | |── testset
+ | | |── image_0001.png
+ | | |── image_0002.png
+ | | ...
+ `── Test
+ |── 01_Indoor
+ | |── indoor_001.png
+ | |── indoor_002.png
+ | ...
+ `── 02_Outdoor
+ |── outdoor_001.png
+ |── outdoor_002.png
+ ...
+```
+
+## WFLW Dataset
+
+
+
+
+
+
+
+WFLW (CVPR'2018)
+ +```bibtex +@inproceedings{wu2018look, + title={Look at boundary: A boundary-aware face alignment algorithm}, + author={Wu, Wayne and Qian, Chen and Yang, Shuo and Wang, Quan and Cai, Yici and Zhou, Qiang}, + booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition}, + pages={2129--2138}, + year={2018} +} +``` + +
+
+
+
+For WFLW data, please download images from [WFLW Dataset](https://wywu.github.io/projects/LAB/WFLW.html).
+Please download the annotation files from [wflw_annotations](https://download.openmmlab.com/mmpose/datasets/wflw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── wflw
+ |── annotations
+ | |── face_landmarks_wflw_train.json
+ | |── face_landmarks_wflw_test.json
+ | |── face_landmarks_wflw_test_blur.json
+ | |── face_landmarks_wflw_test_occlusion.json
+ | |── face_landmarks_wflw_test_expression.json
+ | |── face_landmarks_wflw_test_largepose.json
+ | |── face_landmarks_wflw_test_illumination.json
+ | |── face_landmarks_wflw_test_makeup.json
+ |
+ `── images
+ |── 0--Parade
+ | |── 0_Parade_marchingband_1_1015.jpg
+ | |── 0_Parade_marchingband_1_1031.jpg
+ | ...
+ |── 1--Handshaking
+ | |── 1_Handshaking_Handshaking_1_105.jpg
+ | |── 1_Handshaking_Handshaking_1_107.jpg
+ | ...
+ ...
+```
+
+## AFLW Dataset
+
+
+
+
+
+
+
+For AFLW data, please download images from [AFLW Dataset](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/).
+Please download the annotation files from [aflw_annotations](https://download.openmmlab.com/mmpose/datasets/aflw_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── aflw
+ |── annotations
+ | |── face_landmarks_aflw_train.json
+ | |── face_landmarks_aflw_test_frontal.json
+ | |── face_landmarks_aflw_test.json
+ `── images
+ |── flickr
+ |── 0
+ | |── image00002.jpg
+ | |── image00013.jpg
+ | ...
+ |── 2
+ | |── image00004.jpg
+ | |── image00006.jpg
+ | ...
+ `── 3
+ |── image00032.jpg
+ |── image00035.jpg
+ ...
+```
+
+## COFW Dataset
+
+
+
+AFLW (ICCVW'2011)
+ +```bibtex +@inproceedings{koestinger2011annotated, + title={Annotated facial landmarks in the wild: A large-scale, real-world database for facial landmark localization}, + author={Koestinger, Martin and Wohlhart, Paul and Roth, Peter M and Bischof, Horst}, + booktitle={2011 IEEE international conference on computer vision workshops (ICCV workshops)}, + pages={2144--2151}, + year={2011}, + organization={IEEE} +} +``` + +
+
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+
+
+
+For COFW data, please download from [COFW Dataset (Color Images)](http://www.vision.caltech.edu/xpburgos/ICCV13/Data/COFW_color.zip).
+Move `COFW_train_color.mat` and `COFW_test_color.mat` to `data/cofw/` and make them look like:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+```
+
+Run the following script under `{MMPose}/data`
+
+`python tools/dataset_converters/parse_cofw_dataset.py`
+
+And you will get
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+ |── annotations
+ | |── cofw_train.json
+ | |── cofw_test.json
+ |── images
+ |── 000001.jpg
+ |── 000002.jpg
+```
+
+## COCO-WholeBody (Face)
+
+
+
+
+
+
+
+COCO-WholeBody-Face (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
+
+## LaPa
+
+
+
+
+
+
+
+LaPa (AAAI'2020)
+ +```bibtex +@inproceedings{liu2020new, + title={A New Dataset and Boundary-Attention Semantic Segmentation for Face Parsing.}, + author={Liu, Yinglu and Shi, Hailin and Shen, Hao and Si, Yue and Wang, Xiaobo and Mei, Tao}, + booktitle={AAAI}, + pages={11637--11644}, + year={2020} +} +``` + +
+
+
+
+For [LaPa](https://github.com/JDAI-CV/lapa-dataset) dataset, images can be downloaded from [their github page](https://github.com/JDAI-CV/lapa-dataset).
+
+Download and extract them under $MMPOSE/data, and use our `tools/dataset_converters/lapa2coco.py` to make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── LaPa
+ │-- annotations
+ │ │-- lapa_train.json
+ │ |-- lapa_val.json
+ │ |-- lapa_test.json
+ | |-- lapa_trainval.json
+ │-- train
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+ │-- val
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+ `-- test
+ │ │-- images
+ │ │-- labels
+ │ │-- landmarks
+
+```
diff --git a/docs/zh_cn/dataset_zoo/2d_fashion_landmark.md b/docs/zh_cn/dataset_zoo/2d_fashion_landmark.md
new file mode 100644
index 0000000000000000000000000000000000000000..b1146b47b640820b5b58eb93772082624cc83522
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/2d_fashion_landmark.md
@@ -0,0 +1,142 @@
+# 2D Fashion Landmark Dataset
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [DeepFashion](#deepfashion) \[ [Homepage](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html) \]
+- [DeepFashion2](#deepfashion2) \[ [Homepage](https://github.com/switchablenorms/DeepFashion2) \]
+
+## DeepFashion (Fashion Landmark Detection, FLD)
+
+
+
+
+
+
+
+
+
+DeepFashion (CVPR'2016)
+ +```bibtex +@inproceedings{liuLQWTcvpr16DeepFashion, + author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou}, + title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations}, + booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + month = {June}, + year = {2016} +} +``` + +
+
+
+DeepFashion (ECCV'2016)
+ +```bibtex +@inproceedings{liuYLWTeccv16FashionLandmark, + author = {Liu, Ziwei and Yan, Sijie and Luo, Ping and Wang, Xiaogang and Tang, Xiaoou}, + title = {Fashion Landmark Detection in the Wild}, + booktitle = {European Conference on Computer Vision (ECCV)}, + month = {October}, + year = {2016} + } +``` + +
+
+
+
+For [DeepFashion](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html) dataset, images can be downloaded from [download](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html).
+Please download the annotation files from [fld_annotations](https://download.openmmlab.com/mmpose/datasets/fld_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── fld
+ │-- annotations
+ │ │-- fld_upper_train.json
+ │ |-- fld_upper_val.json
+ │ |-- fld_upper_test.json
+ │ │-- fld_lower_train.json
+ │ |-- fld_lower_val.json
+ │ |-- fld_lower_test.json
+ │ │-- fld_full_train.json
+ │ |-- fld_full_val.json
+ │ |-- fld_full_test.json
+ │-- img
+ │ │-- img_00000001.jpg
+ │ │-- img_00000002.jpg
+ │ │-- img_00000003.jpg
+ │ │-- img_00000004.jpg
+ │ │-- img_00000005.jpg
+ │ │-- ...
+```
+
+## DeepFashion2
+
+
+
+
+
+
+
+
+
+For [DeepFashion2](https://github.com/switchablenorms/DeepFashion2) dataset, images can be downloaded from [download](https://drive.google.com/drive/folders/125F48fsMBz2EF0Cpqk6aaHet5VH399Ok?usp=sharing).
+Please download the [annotation files](https://drive.google.com/file/d/1RM9l9EaB9ULRXhoCS72PkCXtJ4Cn4i6O/view?usp=share_link). These annotation files are converted by [deepfashion2_to_coco.py](https://github.com/switchablenorms/DeepFashion2/blob/master/evaluation/deepfashion2_to_coco.py).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── deepfashion2
+ │── train
+ │-- deepfashion2_short_sleeved_outwear_train.json
+ │-- deepfashion2_short_sleeved_dress_train.json
+ │-- deepfashion2_skirt_train.json
+ │-- deepfashion2_sling_dress_train.json
+ │-- ...
+ │-- image
+ │ │-- 000001.jpg
+ │ │-- 000002.jpg
+ │ │-- 000003.jpg
+ │ │-- 000004.jpg
+ │ │-- 000005.jpg
+ │ │-- ...
+ │── validation
+ │-- deepfashion2_short_sleeved_dress_validation.json
+ │-- deepfashion2_long_sleeved_shirt_validation.json
+ │-- deepfashion2_trousers_validation.json
+ │-- deepfashion2_skirt_validation.json
+ │-- ...
+ │-- image
+ │ │-- 000001.jpg
+ │ │-- 000002.jpg
+ │ │-- 000003.jpg
+ │ │-- 000004.jpg
+ │ │-- 000005.jpg
+ │ │-- ...
+```
diff --git a/docs/zh_cn/dataset_zoo/2d_hand_keypoint.md b/docs/zh_cn/dataset_zoo/2d_hand_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..aade35850c2d0a55b281f300124c325735d79ab1
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/2d_hand_keypoint.md
@@ -0,0 +1,348 @@
+# 2D Hand Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [OneHand10K](#onehand10k) \[ [Homepage](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) \]
+- [FreiHand](#freihand-dataset) \[ [Homepage](https://lmb.informatik.uni-freiburg.de/projects/freihand/) \]
+- [CMU Panoptic HandDB](#cmu-panoptic-handdb) \[ [Homepage](http://domedb.perception.cs.cmu.edu/handdb.html) \]
+- [InterHand2.6M](#interhand26m) \[ [Homepage](https://mks0601.github.io/InterHand2.6M/) \]
+- [RHD](#rhd-dataset) \[ [Homepage](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html) \]
+- [COCO-WholeBody-Hand](#coco-wholebody-hand) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+
+## OneHand10K
+
+
+
+DeepFashion2 (CVPR'2019)
+ +```bibtex +@article{DeepFashion2, + author = {Yuying Ge and Ruimao Zhang and Lingyun Wu and Xiaogang Wang and Xiaoou Tang and Ping Luo}, + title={A Versatile Benchmark for Detection, Pose Estimation, Segmentation and Re-Identification of Clothing Images}, + journal={CVPR}, + year={2019} +} +``` + +
+
+
+OneHand10K (TCSVT'2019)
+ +```bibtex +@article{wang2018mask, + title={Mask-pose cascaded cnn for 2d hand pose estimation from single color image}, + author={Wang, Yangang and Peng, Cong and Liu, Yebin}, + journal={IEEE Transactions on Circuits and Systems for Video Technology}, + volume={29}, + number={11}, + pages={3258--3268}, + year={2018}, + publisher={IEEE} +} +``` + +
+
+
+
+For [OneHand10K](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) data, please download from [OneHand10K Dataset](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html).
+Please download the annotation files from [onehand10k_annotations](https://download.openmmlab.com/mmpose/datasets/onehand10k_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── onehand10k
+ |── annotations
+ | |── onehand10k_train.json
+ | |── onehand10k_test.json
+ `── Train
+ | |── source
+ | |── 0.jpg
+ | |── 1.jpg
+ | ...
+ `── Test
+ |── source
+ |── 0.jpg
+ |── 1.jpg
+
+```
+
+## FreiHAND Dataset
+
+
+
+
+
+
+
+FreiHand (ICCV'2019)
+ +```bibtex +@inproceedings{zimmermann2019freihand, + title={Freihand: A dataset for markerless capture of hand pose and shape from single rgb images}, + author={Zimmermann, Christian and Ceylan, Duygu and Yang, Jimei and Russell, Bryan and Argus, Max and Brox, Thomas}, + booktitle={Proceedings of the IEEE International Conference on Computer Vision}, + pages={813--822}, + year={2019} +} +``` + +
+
+
+
+For [FreiHAND](https://lmb.informatik.uni-freiburg.de/projects/freihand/) data, please download from [FreiHand Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/FreihandDataset.en.html).
+Since the official dataset does not provide validation set, we randomly split the training data into 8:1:1 for train/val/test.
+Please download the annotation files from [freihand_annotations](https://download.openmmlab.com/mmpose/datasets/frei_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── freihand
+ |── annotations
+ | |── freihand_train.json
+ | |── freihand_val.json
+ | |── freihand_test.json
+ `── training
+ |── rgb
+ | |── 00000000.jpg
+ | |── 00000001.jpg
+ | ...
+ |── mask
+ |── 00000000.jpg
+ |── 00000001.jpg
+ ...
+```
+
+## CMU Panoptic HandDB
+
+
+
+
+
+
+
+CMU Panoptic HandDB (CVPR'2017)
+ +```bibtex +@inproceedings{simon2017hand, + title={Hand keypoint detection in single images using multiview bootstrapping}, + author={Simon, Tomas and Joo, Hanbyul and Matthews, Iain and Sheikh, Yaser}, + booktitle={Proceedings of the IEEE conference on Computer Vision and Pattern Recognition}, + pages={1145--1153}, + year={2017} +} +``` + +
+
+
+
+For [CMU Panoptic HandDB](http://domedb.perception.cs.cmu.edu/handdb.html), please download from [CMU Panoptic HandDB](http://domedb.perception.cs.cmu.edu/handdb.html).
+Following [Simon et al](https://arxiv.org/abs/1704.07809), panoptic images (hand143_panopticdb) and MPII & NZSL training sets (manual_train) are used for training, while MPII & NZSL test set (manual_test) for testing.
+Please download the annotation files from [panoptic_annotations](https://download.openmmlab.com/mmpose/datasets/panoptic_annotations.tar).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── panoptic
+ |── annotations
+ | |── panoptic_train.json
+ | |── panoptic_test.json
+ |
+ `── hand143_panopticdb
+ | |── imgs
+ | | |── 00000000.jpg
+ | | |── 00000001.jpg
+ | | ...
+ |
+ `── hand_labels
+ |── manual_train
+ | |── 000015774_01_l.jpg
+ | |── 000015774_01_r.jpg
+ | ...
+ |
+ `── manual_test
+ |── 000648952_02_l.jpg
+ |── 000835470_01_l.jpg
+ ...
+```
+
+## InterHand2.6M
+
+
+
+
+
+
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+
+
+
+For [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/), please download from [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/).
+Please download the annotation files from [annotations](https://drive.google.com/drive/folders/1pWXhdfaka-J0fSAze0MsajN0VpZ8e8tO).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── interhand2.6m
+ |── annotations
+ | |── all
+ | |── human_annot
+ | |── machine_annot
+ | |── skeleton.txt
+ | |── subject.txt
+ |
+ `── images
+ | |── train
+ | | |-- Capture0 ~ Capture26
+ | |── val
+ | | |-- Capture0
+ | |── test
+ | | |-- Capture0 ~ Capture7
+```
+
+## RHD Dataset
+
+
+
+
+
+
+
+RHD (ICCV'2017)
+ +```bibtex +@TechReport{zb2017hand, + author={Christian Zimmermann and Thomas Brox}, + title={Learning to Estimate 3D Hand Pose from Single RGB Images}, + institution={arXiv:1705.01389}, + year={2017}, + note="https://arxiv.org/abs/1705.01389", + url="https://lmb.informatik.uni-freiburg.de/projects/hand3d/" +} +``` + +
+
+
+
+For [RHD Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html), please download from [RHD Dataset](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html).
+Please download the annotation files from [rhd_annotations](https://download.openmmlab.com/mmpose/datasets/rhd_annotations.zip).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── rhd
+ |── annotations
+ | |── rhd_train.json
+ | |── rhd_test.json
+ `── training
+ | |── color
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── depth
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── mask
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ `── evaluation
+ | |── color
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── depth
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+ | |── mask
+ | | |── 00000.jpg
+ | | |── 00001.jpg
+```
+
+## COCO-WholeBody (Hand)
+
+
+
+
+
+
+
+COCO-WholeBody-Hand (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
diff --git a/docs/zh_cn/dataset_zoo/2d_wholebody_keypoint.md b/docs/zh_cn/dataset_zoo/2d_wholebody_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..a082c657c6aee090cfdcfb1a6d3c3c950c7d4342
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/2d_wholebody_keypoint.md
@@ -0,0 +1,133 @@
+# 2D Wholebody Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [COCO-WholeBody](#coco-wholebody) \[ [Homepage](https://github.com/jin-s13/COCO-WholeBody/) \]
+- [Halpe](#halpe) \[ [Homepage](https://github.com/Fang-Haoshu/Halpe-FullBody/) \]
+
+## COCO-WholeBody
+
+
+
+
+
+
+
+COCO-WholeBody (ECCV'2020)
+ +```bibtex +@inproceedings{jin2020whole, + title={Whole-Body Human Pose Estimation in the Wild}, + author={Jin, Sheng and Xu, Lumin and Xu, Jin and Wang, Can and Liu, Wentao and Qian, Chen and Ouyang, Wanli and Luo, Ping}, + booktitle={Proceedings of the European Conference on Computer Vision (ECCV)}, + year={2020} +} +``` + +
+
+
+
+For [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) dataset, images can be downloaded from [COCO download](http://cocodataset.org/#download), 2017 Train/Val is needed for COCO keypoints training and validation.
+Download COCO-WholeBody annotations for COCO-WholeBody annotations for [Train](https://drive.google.com/file/d/1thErEToRbmM9uLNi1JXXfOsaS5VK2FXf/view?usp=sharing) / [Validation](https://drive.google.com/file/d/1N6VgwKnj8DeyGXCvp1eYgNbRmw6jdfrb/view?usp=sharing) (Google Drive).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- annotations
+ │ │-- coco_wholebody_train_v1.0.json
+ │ |-- coco_wholebody_val_v1.0.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- train2017
+ │ │-- 000000000009.jpg
+ │ │-- 000000000025.jpg
+ │ │-- 000000000030.jpg
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) (version>=1.5) to support COCO-WholeBody evaluation:
+
+`pip install xtcocotools`
+
+## Halpe
+
+
+
+
+
+
+
+Halpe (CVPR'2020)
+ +```bibtex +@inproceedings{li2020pastanet, + title={PaStaNet: Toward Human Activity Knowledge Engine}, + author={Li, Yong-Lu and Xu, Liang and Liu, Xinpeng and Huang, Xijie and Xu, Yue and Wang, Shiyi and Fang, Hao-Shu and Ma, Ze and Chen, Mingyang and Lu, Cewu}, + booktitle={CVPR}, + year={2020} +} +``` + +
+
+
+
+For [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/) dataset, please download images and annotations from [Halpe download](https://github.com/Fang-Haoshu/Halpe-FullBody).
+The images of the training set are from [HICO-Det](https://drive.google.com/open?id=1QZcJmGVlF9f4h-XLWe9Gkmnmj2z1gSnk) and those of the validation set are from [COCO](http://images.cocodataset.org/zips/val2017.zip).
+Download person detection result of COCO val2017 from [OneDrive](https://1drv.ms/f/s!AhIXJn_J-blWzzDXoz5BeFl8sWM-) or [GoogleDrive](https://drive.google.com/drive/folders/1fRUDNUDxe9fjqcRZ2bnF_TKMlO0nB_dk?usp=sharing).
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── halpe
+ │-- annotations
+ │ │-- halpe_train_v1.json
+ │ |-- halpe_val_v1.json
+ |-- person_detection_results
+ | |-- COCO_val2017_detections_AP_H_56_person.json
+ │-- hico_20160224_det
+ │ │-- anno_bbox.mat
+ │ │-- anno.mat
+ │ │-- README
+ │ │-- images
+ │ │ │-- train2015
+ │ │ │ │-- HICO_train2015_00000001.jpg
+ │ │ │ │-- HICO_train2015_00000002.jpg
+ │ │ │ │-- HICO_train2015_00000003.jpg
+ │ │ │ │-- ...
+ │ │ │-- test2015
+ │ │-- tools
+ │ │-- ...
+ `-- val2017
+ │-- 000000000139.jpg
+ │-- 000000000285.jpg
+ │-- 000000000632.jpg
+ │-- ...
+
+```
+
+Please also install the latest version of [Extended COCO API](https://github.com/jin-s13/xtcocoapi) (version>=1.5) to support Halpe evaluation:
+
+`pip install xtcocotools`
diff --git a/docs/zh_cn/dataset_zoo/3d_body_keypoint.md b/docs/zh_cn/dataset_zoo/3d_body_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..82e21010fc98cf4f30ced07383340587c0d751df
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/3d_body_keypoint.md
@@ -0,0 +1,199 @@
+# 3D Body Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [Human3.6M](#human36m) \[ [Homepage](http://vision.imar.ro/human3.6m/description.php) \]
+- [CMU Panoptic](#cmu-panoptic) \[ [Homepage](http://domedb.perception.cs.cmu.edu/) \]
+- [Campus/Shelf](#campus-and-shelf) \[ [Homepage](http://campar.in.tum.de/Chair/MultiHumanPose) \]
+
+## Human3.6M
+
+
+
+
+
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+
+For [Human3.6M](http://vision.imar.ro/human3.6m/description.php), please download from the official website and run the [preprocessing script](/tools/dataset_converters/preprocess_h36m.py), which will extract camera parameters and pose annotations at full framerate (50 FPS) and downsampled framerate (10 FPS). The processed data should have the following structure:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── h36m
+ ├── annotation_body3d
+ | ├── cameras.pkl
+ | ├── fps50
+ | | ├── h36m_test.npz
+ | | ├── h36m_train.npz
+ | | ├── joint2d_rel_stats.pkl
+ | | ├── joint2d_stats.pkl
+ | | ├── joint3d_rel_stats.pkl
+ | | `── joint3d_stats.pkl
+ | `── fps10
+ | ├── h36m_test.npz
+ | ├── h36m_train.npz
+ | ├── joint2d_rel_stats.pkl
+ | ├── joint2d_stats.pkl
+ | ├── joint3d_rel_stats.pkl
+ | `── joint3d_stats.pkl
+ `── images
+ ├── S1
+ | ├── S1_Directions_1.54138969
+ | | ├── S1_Directions_1.54138969_00001.jpg
+ | | ├── S1_Directions_1.54138969_00002.jpg
+ | | ├── ...
+ | ├── ...
+ ├── S5
+ ├── S6
+ ├── S7
+ ├── S8
+ ├── S9
+ `── S11
+```
+
+## CMU Panoptic
+
+
+
+
+
+CMU Panoptic (ICCV'2015)
+ +```bibtex +@Article = {joo_iccv_2015, +author = {Hanbyul Joo, Hao Liu, Lei Tan, Lin Gui, Bart Nabbe, Iain Matthews, Takeo Kanade, Shohei Nobuhara, and Yaser Sheikh}, +title = {Panoptic Studio: A Massively Multiview System for Social Motion Capture}, +booktitle = {ICCV}, +year = {2015} +} +``` + +
+
+
+
+Please follow [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) to prepare this dataset.
+
+1. Download the dataset by following the instructions in [panoptic-toolbox](https://github.com/CMU-Perceptual-Computing-Lab/panoptic-toolbox) and extract them under `$MMPOSE/data/panoptic`.
+
+2. Only download those sequences that are needed. You can also just download a subset of camera views by specifying the number of views (HD_Video_Number) and changing the camera order in `./scripts/getData.sh`. The used sequences and camera views can be found in [VoxelPose](https://arxiv.org/abs/2004.06239). Note that the sequence "160906_band3" might not be available due to errors on the server of CMU Panoptic.
+
+3. Note that we only use HD videos, calibration data, and 3D Body Keypoint in the codes. You can comment out other irrelevant codes such as downloading 3D Face data in `./scripts/getData.sh`.
+
+The directory tree should be like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── panoptic
+ ├── 16060224_haggling1
+ | | ├── hdImgs
+ | | ├── hdvideos
+ | | ├── hdPose3d_stage1_coco19
+ | | ├── calibration_160224_haggling1.json
+ ├── 160226_haggling1
+ ├── ...
+```
+
+## Campus and Shelf
+
+
+
+
+
+Campus and Shelf (CVPR'2014)
+ +```bibtex +@inproceedings {belagian14multi, + title = {{3D} Pictorial Structures for Multiple Human Pose Estimation}, + author = {Belagiannis, Vasileios and Amin, Sikandar and Andriluka, Mykhaylo and Schiele, Bernt and Navab + Nassir and Ilic, Slobo + booktitle = {IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June}, + organization={IEEE} +} +``` + +
+
+
+
+Please follow [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) to prepare these two datasets.
+
+1. Please download the datasets from the [official website](http://campar.in.tum.de/Chair/MultiHumanPose) and extract them under `$MMPOSE/data/campus` and `$MMPOSE/data/shelf`, respectively. The original data include images as well as the ground truth pose file `actorsGT.mat`.
+
+2. We directly use the processed camera parameters from [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch). You can download them from this repository and place in under `$MMPOSE/data/campus/calibration_campus.json` and `$MMPOSE/data/shelf/calibration_shelf.json`, respectively.
+
+3. Like [Voxelpose](https://github.com/microsoft/voxelpose-pytorch), due to the limited and incomplete annotations of the two datasets, we don't train the model using this dataset. Instead, we directly use the 2D pose estimator trained on COCO, and use independent 3D human poses from the CMU Panoptic dataset to train our 3D model. It lies in `${MMPOSE}/data/panoptic_training_pose.pkl`.
+
+4. Like [Voxelpose](https://github.com/microsoft/voxelpose-pytorch), for testing, we first estimate 2D poses and generate 2D heatmaps for these two datasets. You can download the predicted poses from [voxelpose-pytorch](https://github.com/microsoft/voxelpose-pytorch) and place them in `$MMPOSE/data/campus/pred_campus_maskrcnn_hrnet_coco.pkl` and `$MMPOSE/data/shelf/pred_shelf_maskrcnn_hrnet_coco.pkl`, respectively. You can also use the models trained on COCO dataset (like HigherHRNet) to generate 2D heatmaps directly.
+
+The directory tree should be like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── panoptic_training_pose.pkl
+ ├── campus
+ | ├── Camera0
+ | | | ├── campus4-c0-00000.png
+ | | | ├── ...
+ | | | ├── campus4-c0-01999.png
+ | ...
+ | ├── Camera2
+ | | | ├── campus4-c2-00000.png
+ | | | ├── ...
+ | | | ├── campus4-c2-01999.png
+ | ├── calibration_campus.json
+ | ├── pred_campus_maskrcnn_hrnet_coco.pkl
+ | ├── actorsGT.mat
+ ├── shelf
+ | ├── Camera0
+ | | | ├── img_000000.png
+ | | | ├── ...
+ | | | ├── img_003199.png
+ | ...
+ | ├── Camera4
+ | | | ├── img_000000.png
+ | | | ├── ...
+ | | | ├── img_003199.png
+ | ├── calibration_shelf.json
+ | ├── pred_shelf_maskrcnn_hrnet_coco.pkl
+ | ├── actorsGT.mat
+```
diff --git a/docs/zh_cn/dataset_zoo/3d_body_mesh.md b/docs/zh_cn/dataset_zoo/3d_body_mesh.md
new file mode 100644
index 0000000000000000000000000000000000000000..aced63c802c20f0d7b07277393076f2e03f87afc
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/3d_body_mesh.md
@@ -0,0 +1,342 @@
+# 3D Body Mesh Recovery Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+To achieve high-quality human mesh estimation, we use multiple datasets for training.
+The following items should be prepared for human mesh training:
+
+
+
+- [3D Body Mesh Recovery Datasets](#3d-body-mesh-recovery-datasets)
+ - [Notes](#notes)
+ - [Annotation Files for Human Mesh Estimation](#annotation-files-for-human-mesh-estimation)
+ - [SMPL Model](#smpl-model)
+ - [COCO](#coco)
+ - [Human3.6M](#human36m)
+ - [MPI-INF-3DHP](#mpi-inf-3dhp)
+ - [LSP](#lsp)
+ - [LSPET](#lspet)
+ - [CMU MoShed Data](#cmu-moshed-data)
+
+
+
+## Notes
+
+### Annotation Files for Human Mesh Estimation
+
+For human mesh estimation, we use multiple datasets for training.
+The annotation of different datasets are preprocessed to the same format. Please
+follow the [preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to generate the annotation files or download the processed files from
+[here](https://download.openmmlab.com/mmpose/datasets/mesh_annotation_files.zip),
+and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mesh_annotation_files
+ ├── coco_2014_train.npz
+ ├── h36m_valid_protocol1.npz
+ ├── h36m_valid_protocol2.npz
+ ├── hr-lspet_train.npz
+ ├── lsp_dataset_original_train.npz
+ ├── mpi_inf_3dhp_train.npz
+ └── mpii_train.npz
+```
+
+### SMPL Model
+
+```bibtex
+@article{loper2015smpl,
+ title={SMPL: A skinned multi-person linear model},
+ author={Loper, Matthew and Mahmood, Naureen and Romero, Javier and Pons-Moll, Gerard and Black, Michael J},
+ journal={ACM transactions on graphics (TOG)},
+ volume={34},
+ number={6},
+ pages={1--16},
+ year={2015},
+ publisher={ACM New York, NY, USA}
+}
+```
+
+For human mesh estimation, SMPL model is used to generate the human mesh.
+Please download the [gender neutral SMPL model](http://smplify.is.tue.mpg.de/),
+[joints regressor](https://download.openmmlab.com/mmpose/datasets/joints_regressor_cmr.npy)
+and [mean parameters](https://download.openmmlab.com/mmpose/datasets/smpl_mean_params.npz)
+under `$MMPOSE/models/smpl`, and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── ...
+├── models
+ │── smpl
+ ├── joints_regressor_cmr.npy
+ ├── smpl_mean_params.npz
+ └── SMPL_NEUTRAL.pkl
+```
+
+## COCO
+
+
+
+
+
+
+
+For [COCO](http://cocodataset.org/) data, please download from [COCO download](http://cocodataset.org/#download). COCO'2014 Train is needed for human mesh estimation training.
+Download and extract them under $MMPOSE/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── coco
+ │-- train2014
+ │ ├── COCO_train2014_000000000009.jpg
+ │ ├── COCO_train2014_000000000025.jpg
+ │ ├── COCO_train2014_000000000030.jpg
+ | │-- ...
+
+```
+
+## Human3.6M
+
+
+
+COCO (ECCV'2014)
+ +```bibtex +@inproceedings{lin2014microsoft, + title={Microsoft coco: Common objects in context}, + author={Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll{\'a}r, Piotr and Zitnick, C Lawrence}, + booktitle={European conference on computer vision}, + pages={740--755}, + year={2014}, + organization={Springer} +} +``` + +
+
+
+For [Human3.6M](http://vision.imar.ro/human3.6m/description.php), we use the MoShed data provided in [HMR](https://github.com/akanazawa/hmr) for training.
+However, due to license limitations, we are not allowed to redistribute the MoShed data.
+
+For the evaluation on Human3.6M dataset, please follow the
+[preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to extract test images from
+[Human3.6M](http://vision.imar.ro/human3.6m/description.php) original videos,
+and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── Human3.6M
+ ├── images
+ ├── S11_Directions_1.54138969_000001.jpg
+ ├── S11_Directions_1.54138969_000006.jpg
+ ├── S11_Directions_1.54138969_000011.jpg
+ ├── ...
+```
+
+The download of Human3.6M dataset is quite difficult, you can also download the
+[zip file](https://drive.google.com/file/d/1WnRJD9FS3NUf7MllwgLRJJC-JgYFr8oi/view?usp=sharing)
+of the test images. However, due to the license limitations, we are not allowed to
+redistribute the images either. So the users need to download the original video and
+extract the images by themselves.
+
+## MPI-INF-3DHP
+
+
+
+```bibtex
+@inproceedings{mono-3dhp2017,
+ author = {Mehta, Dushyant and Rhodin, Helge and Casas, Dan and Fua, Pascal and Sotnychenko, Oleksandr and Xu, Weipeng and Theobalt, Christian},
+ title = {Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision},
+ booktitle = {3D Vision (3DV), 2017 Fifth International Conference on},
+ url = {http://gvv.mpi-inf.mpg.de/3dhp_dataset},
+ year = {2017},
+ organization={IEEE},
+ doi={10.1109/3dv.2017.00064},
+}
+```
+
+For [MPI-INF-3DHP](http://gvv.mpi-inf.mpg.de/3dhp-dataset/), please follow the
+[preprocess procedure](https://github.com/nkolot/SPIN/tree/master/datasets/preprocess)
+of SPIN to sample images, and make them like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── mpi_inf_3dhp_test_set
+ │ ├── TS1
+ │ ├── TS2
+ │ ├── TS3
+ │ ├── TS4
+ │ ├── TS5
+ │ └── TS6
+ ├── S1
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S2
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S3
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S4
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S5
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S6
+ │ ├── Seq1
+ │ └── Seq2
+ ├── S7
+ │ ├── Seq1
+ │ └── Seq2
+ └── S8
+ ├── Seq1
+ └── Seq2
+```
+
+## LSP
+
+
+
+```bibtex
+@inproceedings{johnson2010clustered,
+ title={Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation.},
+ author={Johnson, Sam and Everingham, Mark},
+ booktitle={bmvc},
+ volume={2},
+ number={4},
+ pages={5},
+ year={2010},
+ organization={Citeseer}
+}
+```
+
+For [LSP](https://sam.johnson.io/research/lsp.html), please download the high resolution version
+[LSP dataset original](http://sam.johnson.io/research/lsp_dataset_original.zip).
+Extract them under `$MMPOSE/data`, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── lsp_dataset_original
+ ├── images
+ ├── im0001.jpg
+ ├── im0002.jpg
+ └── ...
+```
+
+## LSPET
+
+
+
+```bibtex
+@inproceedings{johnson2011learning,
+ title={Learning effective human pose estimation from inaccurate annotation},
+ author={Johnson, Sam and Everingham, Mark},
+ booktitle={CVPR 2011},
+ pages={1465--1472},
+ year={2011},
+ organization={IEEE}
+}
+```
+
+For [LSPET](https://sam.johnson.io/research/lspet.html), please download its high resolution form
+[HR-LSPET](http://datasets.d2.mpi-inf.mpg.de/hr-lspet/hr-lspet.zip).
+Extract them under `$MMPOSE/data`, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── lspet_dataset
+ ├── images
+ │ ├── im00001.jpg
+ │ ├── im00002.jpg
+ │ ├── im00003.jpg
+ │ └── ...
+ └── joints.mat
+```
+
+## CMU MoShed Data
+
+
+
+```bibtex
+@inproceedings{kanazawa2018end,
+ title={End-to-end recovery of human shape and pose},
+ author={Kanazawa, Angjoo and Black, Michael J and Jacobs, David W and Malik, Jitendra},
+ booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
+ pages={7122--7131},
+ year={2018}
+}
+```
+
+Real-world SMPL parameters are used for the adversarial training in human mesh estimation.
+The MoShed data provided in [HMR](https://github.com/akanazawa/hmr) is included in this
+[zip file](https://download.openmmlab.com/mmpose/datasets/mesh_annotation_files.zip).
+Please download and extract it under `$MMPOSE/data`, and make it look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── mesh_annotation_files
+ ├── CMU_mosh.npz
+ └── ...
+```
diff --git a/docs/zh_cn/dataset_zoo/3d_hand_keypoint.md b/docs/zh_cn/dataset_zoo/3d_hand_keypoint.md
new file mode 100644
index 0000000000000000000000000000000000000000..2b1f4d3923a176b95704473bb3f1fb2153958039
--- /dev/null
+++ b/docs/zh_cn/dataset_zoo/3d_hand_keypoint.md
@@ -0,0 +1,59 @@
+# 3D Hand Keypoint Datasets
+
+It is recommended to symlink the dataset root to `$MMPOSE/data`.
+If your folder structure is different, you may need to change the corresponding paths in config files.
+
+MMPose supported datasets:
+
+- [InterHand2.6M](#interhand26m) \[ [Homepage](https://mks0601.github.io/InterHand2.6M/) \]
+
+## InterHand2.6M
+
+
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+InterHand2.6M (ECCV'2020)
+ +```bibtex +@InProceedings{Moon_2020_ECCV_InterHand2.6M, +author = {Moon, Gyeongsik and Yu, Shoou-I and Wen, He and Shiratori, Takaaki and Lee, Kyoung Mu}, +title = {InterHand2.6M: A Dataset and Baseline for 3D Interacting Hand Pose Estimation from a Single RGB Image}, +booktitle = {European Conference on Computer Vision (ECCV)}, +year = {2020} +} +``` + +
+
+
+
+For [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/), please download from [InterHand2.6M](https://mks0601.github.io/InterHand2.6M/).
+Please download the annotation files from [annotations](https://drive.google.com/drive/folders/1pWXhdfaka-J0fSAze0MsajN0VpZ8e8tO).
+Extract them under {MMPose}/data, and make them look like this:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── interhand2.6m
+ |── annotations
+ | |── all
+ | |── human_annot
+ | |── machine_annot
+ | |── skeleton.txt
+ | |── subject.txt
+ |
+ `── images
+ | |── train
+ | | |-- Capture0 ~ Capture26
+ | |── val
+ | | |-- Capture0
+ | |── test
+ | | |-- Capture0 ~ Capture7
+```
diff --git a/docs/zh_cn/faq.md b/docs/zh_cn/faq.md
new file mode 100644
index 0000000000000000000000000000000000000000..2a62ecf6cb0eeb5c567f7ae23ef50da0832e4fce
--- /dev/null
+++ b/docs/zh_cn/faq.md
@@ -0,0 +1,155 @@
+# FAQ
+
+We list some common issues faced by many users and their corresponding solutions here.
+Feel free to enrich the list if you find any frequent issues and have ways to help others to solve them.
+If the contents here do not cover your issue, please create an issue using the [provided templates](/.github/ISSUE_TEMPLATE/error-report.md) and make sure you fill in all required information in the template.
+
+## Installation
+
+Compatibility issue between MMCV and MMPose; "AssertionError: MMCV==xxx is used but incompatible. Please install mmcv>=xxx, \<=xxx."
+
+Here are the version correspondences between `mmdet`, `mmcv` and `mmpose`:
+
+- mmdet 2.x \<=> mmpose 0.x \<=> mmcv 1.x
+- mmdet 3.x \<=> mmpose 1.x \<=> mmcv 2.x
+
+Detailed compatible MMPose and MMCV versions are shown as below. Please choose the correct version of MMCV to avoid installation issues.
+
+### MMPose 1.x
+
+| MMPose version | MMCV/MMEngine version |
+| :------------: | :-----------------------------: |
+| 1.3.1 | mmcv>=2.0.1, mmengine>=0.9.0 |
+| 1.3.0 | mmcv>=2.0.1, mmengine>=0.9.0 |
+| 1.2.0 | mmcv>=2.0.1, mmengine>=0.8.0 |
+| 1.1.0 | mmcv>=2.0.1, mmengine>=0.8.0 |
+| 1.0.0 | mmcv>=2.0.0, mmengine>=0.7.0 |
+| 1.0.0rc1 | mmcv>=2.0.0rc4, mmengine>=0.6.0 |
+| 1.0.0rc0 | mmcv>=2.0.0rc0, mmengine>=0.0.1 |
+| 1.0.0b0 | mmcv>=2.0.0rc0, mmengine>=0.0.1 |
+
+### MMPose 0.x
+
+| MMPose version | MMCV version |
+| :------------: | :-----------------------: |
+| 0.x | mmcv-full>=1.3.8, \<1.8.0 |
+| 0.29.0 | mmcv-full>=1.3.8, \<1.7.0 |
+| 0.28.1 | mmcv-full>=1.3.8, \<1.7.0 |
+| 0.28.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.27.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.26.0 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.25.1 | mmcv-full>=1.3.8, \<1.6.0 |
+| 0.25.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.24.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.23.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.22.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.21.0 | mmcv-full>=1.3.8, \<1.5.0 |
+| 0.20.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.19.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.18.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.17.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.16.0 | mmcv-full>=1.3.8, \<1.4.0 |
+| 0.14.0 | mmcv-full>=1.1.3, \<1.4.0 |
+| 0.13.0 | mmcv-full>=1.1.3, \<1.4.0 |
+| 0.12.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.11.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.10.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.9.0 | mmcv-full>=1.1.3, \<1.3 |
+| 0.8.0 | mmcv-full>=1.1.1, \<1.2 |
+| 0.7.0 | mmcv-full>=1.1.1, \<1.2 |
+
+- **Unable to install xtcocotools**
+
+ 1. Try to install it using pypi manually `pip install xtcocotools`.
+ 2. If step1 does not work. Try to install it from [source](https://github.com/jin-s13/xtcocoapi).
+
+ ```
+ git clone https://github.com/jin-s13/xtcocoapi
+ cd xtcocoapi
+ python setup.py install
+ ```
+
+- **No matching distribution found for xtcocotools>=1.6**
+
+ 1. Install cython by `pip install cython`.
+ 2. Install xtcocotools from [source](https://github.com/jin-s13/xtcocoapi).
+
+ ```
+ git clone https://github.com/jin-s13/xtcocoapi
+ cd xtcocoapi
+ python setup.py install
+ ```
+
+- **"No module named 'mmcv.ops'"; "No module named 'mmcv.\_ext'"**
+
+ 1. Uninstall existing mmcv in the environment using `pip uninstall mmcv`.
+ 2. Install mmcv-full following the [installation instruction](https://mmcv.readthedocs.io/en/latest/#installation).
+
+## Data
+
+- **What if my custom dataset does not have bounding box label?**
+
+ We can estimate the bounding box of a person as the minimal box that tightly bounds all the keypoints.
+
+- **What is `COCO_val2017_detections_AP_H_56_person.json`? Can I train pose models without it?**
+
+ "COCO_val2017_detections_AP_H_56_person.json" contains the "detected" human bounding boxes for COCO validation set, which are generated by FasterRCNN.
+ One can choose to use gt bounding boxes to evaluate models, by setting `bbox_file=None''` in `val_dataloader.dataset` in config. Or one can use detected boxes to evaluate
+ the generalizability of models, by setting `bbox_file='COCO_val2017_detections_AP_H_56_person.json'`.
+
+## Training
+
+- **RuntimeError: Address already in use**
+
+ Set the environment variables `MASTER_PORT=XXX`. For example,
+ `MASTER_PORT=29517 GPUS=16 GPUS_PER_NODE=8 CPUS_PER_TASK=2 ./tools/slurm_train.sh Test res50 configs/body_2d_keypoint/topdown_regression/coco/td-reg_res50_8xb64-210e_coco-256x192.py work_dirs/res50_coco_256x192`
+
+- **"Unexpected keys in source state dict" when loading pre-trained weights**
+
+ It's normal that some layers in the pretrained model are not used in the pose model. ImageNet-pretrained classification network and the pose network may have different architectures (e.g. no classification head). So some unexpected keys in source state dict is actually expected.
+
+- **How to use trained models for backbone pre-training ?**
+
+ Refer to [Migration - Step3: Model - Backbone](../migration.md).
+
+ When training, the unexpected keys will be ignored.
+
+- **How to visualize the training accuracy/loss curves in real-time ?**
+
+ Use `TensorboardLoggerHook` in `log_config` like
+
+ ```python
+ log_config=dict(interval=20, hooks=[dict(type='TensorboardLoggerHook')])
+ ```
+
+ You can refer to [user_guides/visualization.md](../user_guides/visualization.md).
+
+- **Log info is NOT printed**
+
+ Use smaller log interval. For example, change `interval=50` to `interval=1` in the config.
+
+## Evaluation
+
+- **How to evaluate on MPII test dataset?**
+ Since we do not have the ground-truth for test dataset, we cannot evaluate it 'locally'.
+ If you would like to evaluate the performance on test set, you have to upload the pred.mat (which is generated during testing) to the official server via email, according to [the MPII guideline](http://human-pose.mpi-inf.mpg.de/#evaluation).
+
+- **For top-down 2d pose estimation, why predicted joint coordinates can be out of the bounding box (bbox)?**
+ We do not directly use the bbox to crop the image. bbox will be first transformed to center & scale, and the scale will be multiplied by a factor (1.25) to include some context. If the ratio of width/height is different from that of model input (possibly 192/256), we will adjust the bbox.
+
+## Inference
+
+- **How to run mmpose on CPU?**
+
+ Run demos with `--device=cpu`.
+
+- **How to speed up inference?**
+
+ For top-down models, try to edit the config file. For example,
+
+ 1. set `flip_test=False` in `init_cfg` in the config file.
+ 2. use faster human bounding box detector, see [MMDetection](https://mmdetection.readthedocs.io/zh_CN/3.x/model_zoo.html).
+
+- **What is the definition of each keypoint index?**
+
+ Check the [meta information file](https://github.com/open-mmlab/mmpose/tree/main/configs/_base_/datasets) for the dataset used to train the model you are using. They key `keypoint_info` includes the definition of each keypoint.
diff --git a/docs/zh_cn/guide_to_framework.md b/docs/zh_cn/guide_to_framework.md
new file mode 100644
index 0000000000000000000000000000000000000000..df86f8634f303308ff1f887692c850cd1c5816cb
--- /dev/null
+++ b/docs/zh_cn/guide_to_framework.md
@@ -0,0 +1,745 @@
+# 20 分钟上手 MMPose
+
+MMPose 1.0 与之前的版本有较大改动,对部分模块进行了重新设计和组织,降低代码冗余度,提升运行效率,降低学习难度。
+
+MMPose 1.0 采用了全新的模块结构设计以精简代码,提升运行效率,降低学习难度。对于有一定深度学习基础的用户,本章节提供了对 MMPose 架构设计的总体介绍。不论你是**旧版 MMPose 的用户**,还是**希望直接从 MMPose 1.0 上手的新用户**,都可以通过本教程了解如何构建一个基于 MMPose 1.0 的项目。
+
+```{note}
+本教程包含了使用 MMPose 1.0 时开发者会关心的内容:
+
+- 整体代码架构与设计逻辑
+
+- 如何用config文件管理模块
+
+- 如何使用自定义数据集
+
+- 如何添加新的模块(骨干网络、模型头部、损失函数等)
+```
+
+以下是这篇教程的目录:
+
+- [20 分钟上手 MMPose](#20-分钟上手-mmpose)
+ - [文件结构](#文件结构)
+ - [总览](#总览)
+ - [Step1:配置文件](#step1配置文件)
+ - [Step2:数据](#step2数据)
+ - [数据集元信息](#数据集元信息)
+ - [数据集](#数据集)
+ - [数据流水线](#数据流水线)
+ - [i. 数据增强](#i-数据增强)
+ - [ii. 数据变换](#ii-数据变换)
+ - [iii. 数据编码](#iii-数据编码)
+ - [iv. 数据打包](#iv-数据打包)
+ - [Step3: 模型](#step3-模型)
+ - [前处理器(DataPreprocessor)](#前处理器datapreprocessor)
+ - [主干网络(Backbone)](#主干网络backbone)
+ - [颈部模块(Neck)](#颈部模块neck)
+ - [预测头(Head)](#预测头head)
+
+## 文件结构
+
+MMPose 1.0 的文件结构如下所示:
+
+```shell
+mmpose
+|----apis
+|----structures
+|----datasets
+ |----transforms
+|----codecs
+|----models
+ |----pose_estimators
+ |----data_preprocessors
+ |----backbones
+ |----necks
+ |----heads
+ |----losses
+|----engine
+ |----hooks
+|----evaluation
+|----visualization
+```
+
+- **apis** 提供用于模型推理的高级 API
+- **structures** 提供 bbox、keypoint 和 PoseDataSample 等数据结构
+- **datasets** 支持用于姿态估计的各种数据集
+ - **transforms** 包含各种数据增强变换
+- **codecs** 提供姿态编解码器:编码器用于将姿态信息(通常为关键点坐标)编码为模型学习目标(如热力图),解码器则用于将模型输出解码为姿态估计结果
+- **models** 以模块化结构提供了姿态估计模型的各类组件
+ - **pose_estimators** 定义了所有姿态估计模型类
+ - **data_preprocessors** 用于预处理模型的输入数据
+ - **backbones** 包含各种骨干网络
+ - **necks** 包含各种模型颈部组件
+ - **heads** 包含各种模型头部
+ - **losses** 包含各种损失函数
+- **engine** 包含与姿态估计任务相关的运行时组件
+ - **hooks** 提供运行时的各种钩子
+- **evaluation** 提供各种评估模型性能的指标
+- **visualization** 用于可视化关键点骨架和热力图等信息
+
+## 总览
+
+
+
+一般来说,开发者在项目开发过程中经常接触内容的主要有**五个**方面:
+
+- **通用**:环境、钩子(Hook)、模型权重存取(Checkpoint)、日志(Logger)等
+
+- **数据**:数据集、数据读取(Dataloader)、数据增强等
+
+- **训练**:优化器、学习率调整等
+
+- **模型**:主干网络、颈部模块(Neck)、预测头模块(Head)、损失函数等
+
+- **评测**:评测指标(Metric)、评测器(Evaluator)等
+
+其中**通用**、**训练**和**评测**相关的模块往往由训练框架提供,开发者只需要调用和调整参数,不需要自行实现,开发者主要实现的是**数据**和**模型**部分。
+
+## Step1:配置文件
+
+在MMPose中,我们通常 python 格式的配置文件,用于整个项目的定义、参数管理,因此我们强烈建议第一次接触 MMPose 的开发者,查阅 [【用户教程 - 如何看懂配置文件】](./user_guides/configs.md) 学习配置文件的定义。
+
+需要注意的是,所有新增的模块都需要使用注册器进行注册,并在对应目录的 `__init__.py` 中进行 `import`,以便能够使用配置文件构建其实例。
+
+## Step2:数据
+
+MMPose 数据的组织主要包含三个方面:
+
+- 数据集元信息(meta info)
+
+- 数据集(dataset)
+
+- 数据流水线(pipeline)
+
+### 数据集元信息
+
+元信息指具体标注之外的数据集信息。姿态估计数据集的元信息通常包括:关键点和骨骼连接的定义、对称性、关键点性质(如关键点权重、标注标准差、所属上下半身)等。这些信息在数据在数据处理、模型训练和测试中有重要作用。在 MMPose 中,数据集的元信息使用 python 格式的配置文件保存,位于 [$MMPOSE/configs/_base_/datasets](https://github.com/open-mmlab/mmpose/tree/main/configs/_base_/datasets) 目录下。
+
+在 MMPose 中使用自定义数据集时,你需要增加对应的元信息配置文件。以 MPII 数据集([$MMPOSE/configs/\_base\_/datasets/mpii.py](https://github.com/open-mmlab/mmpose/blob/main/configs/_base_/datasets/mpii.py))为例:
+
+```Python
+dataset_info = dict(
+ dataset_name='mpii',
+ paper_info=dict(
+ author='Mykhaylo Andriluka and Leonid Pishchulin and '
+ 'Peter Gehler and Schiele, Bernt',
+ title='2D Human Pose Estimation: New Benchmark and '
+ 'State of the Art Analysis',
+ container='IEEE Conference on Computer Vision and '
+ 'Pattern Recognition (CVPR)',
+ year='2014',
+ homepage='http://human-pose.mpi-inf.mpg.de/',
+ ),
+ keypoint_info={
+ 0:
+ dict(
+ name='right_ankle',
+ id=0,
+ color=[255, 128, 0],
+ type='lower',
+ swap='left_ankle'),
+ ## 内容省略
+ },
+ skeleton_info={
+ 0:
+ dict(link=('right_ankle', 'right_knee'), id=0, color=[255, 128, 0]),
+ ## 内容省略
+ },
+ joint_weights=[
+ 1.5, 1.2, 1., 1., 1.2, 1.5, 1., 1., 1., 1., 1.5, 1.2, 1., 1., 1.2, 1.5
+ ],
+ # 使用 COCO 数据集中提供的 sigmas 值
+ sigmas=[
+ 0.089, 0.083, 0.107, 0.107, 0.083, 0.089, 0.026, 0.026, 0.026, 0.026,
+ 0.062, 0.072, 0.179, 0.179, 0.072, 0.062
+ ])
+```
+
+在这份元信息配置文件中:
+
+- `keypoint_info`:每个关键点的信息:
+ 1. `name`: 关键点名称,必须是唯一的,例如 `nose`、`left_eye` 等。
+ 2. `id`: 关键点 ID,必须是唯一的,从 0 开始。
+ 3. `color`: 关键点可视化时的颜色,以 (\[B, G, R\]) 格式组织起来,用于可视化。
+ 4. `type`: 关键点类型,可以是 `upper`、`lower` 或 `''`,用于数据增强 [RandomHalfBody](https://github.com/open-mmlab/mmpose/blob/b225a773d168fc2afd48cde5f76c0202d1ba2f52/mmpose/datasets/transforms/common_transforms.py#L263)。
+ 5. `swap`: 关键点交换关系,用于水平翻转数据增强 [RandomFlip](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/common_transforms.py#L94)。
+- `skeleton_info`:骨架连接关系,用于可视化。
+- `joint_weights`:每个关键点的权重,用于损失函数计算。
+- `sigma`:标准差,用于计算 OKS 分数,详细信息请参考 [keypoints-eval](https://cocodataset.org/#keypoints-eval)。
+
+在模型配置文件中,你需要为自定义数据集指定对应的元信息配置文件。假如该元信息配置文件路径为 `$MMPOSE/configs/_base_/datasets/{your_dataset}.py`,指定方式如下:
+
+```python
+# dataset and dataloader settings
+dataset_type = 'MyCustomDataset' # or 'CocoDataset'
+train_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root of your train data',
+ ann_file='path to your json file',
+ data_prefix=dict(img='path to your train img'),
+ # 指定对应的元信息配置文件
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+val_dataloader = dict(
+ batch_size=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root='root of your val data',
+ ann_file='path to your val json',
+ data_prefix=dict(img='path to your val img'),
+ # 指定对应的元信息配置文件
+ metainfo=dict(from_file='configs/_base_/datasets/custom.py'),
+ ...),
+ )
+test_dataloader = val_dataloader
+```
+
+下面是一个更加具体的例子,假设你的数据集按照以下结构进行组织:
+
+```shell
+data
+├── annotations
+│ ├── train.json
+│ ├── val.json
+├── train
+│ ├── images
+│ │ ├── 000001.jpg
+├── val
+│ ├── images
+│ │ ├── 000002.jpg
+```
+
+你的数据集路径应该如下所示:
+
+```
+dataset=dict(
+ ...
+ data_root='data/',
+ ann_file='annotations/train.json',
+ data_prefix=dict(img='train/images/'),
+ ...),
+```
+
+### 数据集
+
+在 MMPose 中使用自定义数据集时,我们推荐将数据转化为已支持的格式(如 COCO 或 MPII),并直接使用我们提供的对应数据集实现。如果这种方式不可行,则用户需要实现自己的数据集类。
+
+更多自定义数据集的使用方式,请前往 [【进阶教程 - 自定义数据集】](./advanced_guides/customize_datasets.md)。
+
+````{note}
+如果你需要直接继承 [MMEngine](https://github.com/open-mmlab/mmengine) 中提供的 `BaseDataset` 基类。具体方法请参考相关[文档](https://mmengine.readthedocs.io/en/latest/advanced_tutorials/basedataset.html)
+
+
+#### 2D 数据集
+MMPose 中的大部分 2D 关键点数据集**以 COCO 形式组织**,为此我们提供了基类 [BaseCocoStyleDataset](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/datasets/base/base_coco_style_dataset.py)。我们推荐用户继承该基类,并按需重写它的方法(通常是 `__init__()` 和 `_load_annotations()` 方法),以扩展到新的 2D 关键点数据集。
+
+```{note}
+关于COCO数据格式的详细说明请参考 [COCO](./dataset_zoo/2d_body_keypoint.md) 。
+````
+
+在 MMPose 中 bbox 的数据格式采用 `xyxy`,而不是 `xywh`,这与 [MMDetection](https://github.com/open-mmlab/mmdetection) 等其他 OpenMMLab 成员保持一致。为了实现不同 bbox 格式之间的转换,我们提供了丰富的函数:`bbox_xyxy2xywh`、`bbox_xywh2xyxy`、`bbox_xyxy2cs`等。这些函数定义在 [$MMPOSE/mmpose/structures/bbox/transforms.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/structures/bbox/transforms.py)。
+
+下面我们以 COCO 格式标注的 CrowdPose 数据集的实现([$MMPOSE/mmpose/datasets/datasets/body/crowdpose_dataset.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/datasets/body/crowdpose_dataset.py))为例:
+
+```Python
+@DATASETS.register_module()
+class CrowdPoseDataset(BaseCocoStyleDataset):
+ """CrowdPose dataset for pose estimation.
+
+ "CrowdPose: Efficient Crowded Scenes Pose Estimation and
+ A New Benchmark", CVPR'2019.
+ More details can be found in the `paper
+
++ + - 拼接操作 + + ```python + neck=dict(type='FeatureMapProcessor', concat=True) + ``` + +
+ + 拼接之前,其它特征图会被缩放到和序号为 0 的特征图相同的尺寸。 + + - 缩放操作 + + ```python + neck=dict(type='FeatureMapProcessor', scale_factor=2.0) + ``` + +
+ +### 预测头(Head) + +通常来说,预测头是模型算法实现的核心,用于控制模型的输出,并进行损失函数计算。 + +MMPose 中 Head 相关的模块定义在 [$MMPOSE/mmpose/models/heads](https://github.com/open-mmlab/mmpose/tree/main/mmpose/models/heads) 目录下,开发者在自定义预测头时需要继承我们提供的基类 [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py),并重载以下三个方法对应模型推理的三种模式: + +- forward() + +- predict() + +- loss() + +具体而言,`predict()` 返回的应是输入图片尺度下的结果,因此需要调用 `self.decode()` 对网络输出进行解码,这一过程实现在 [BaseHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/base_head.py) 中已经实现,它会调用编解码器提供的 `decode()` 方法来完成解码。 + +另一方面,我们会在 `predict()` 中进行测试时增强。在进行预测时,一个常见的测试时增强技巧是进行翻转集成。即,将一张图片先进行一次推理,再将图片水平翻转进行一次推理,推理的结果再次水平翻转回去,对两次推理的结果进行平均。这个技巧能有效提升模型的预测稳定性。 + +下面是在 [RegressionHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/regression_heads/regression_head.py) 中定义 `predict()` 的例子: + +```Python +def predict(self, + feats: Tuple[Tensor], + batch_data_samples: OptSampleList, + test_cfg: ConfigType = {}) -> Predictions: + """Predict results from outputs.""" + + if test_cfg.get('flip_test', False): + # TTA: flip test -> feats = [orig, flipped] + assert isinstance(feats, list) and len(feats) == 2 + flip_indices = batch_data_samples[0].metainfo['flip_indices'] + input_size = batch_data_samples[0].metainfo['input_size'] + _feats, _feats_flip = feats + _batch_coords = self.forward(_feats) + _batch_coords_flip = flip_coordinates( + self.forward(_feats_flip), + flip_indices=flip_indices, + shift_coords=test_cfg.get('shift_coords', True), + input_size=input_size) + batch_coords = (_batch_coords + _batch_coords_flip) * 0.5 + else: + batch_coords = self.forward(feats) # (B, K, D) + + batch_coords.unsqueeze_(dim=1) # (B, N, K, D) + preds = self.decode(batch_coords) +``` + +`loss()`除了进行损失函数的计算,还会进行 accuracy 等训练时指标的计算,并通过一个字典 `losses` 来传递: + +```Python + # calculate accuracy +_, avg_acc, _ = keypoint_pck_accuracy( + pred=to_numpy(pred_coords), + gt=to_numpy(keypoint_labels), + mask=to_numpy(keypoint_weights) > 0, + thr=0.05, + norm_factor=np.ones((pred_coords.size(0), 2), dtype=np.float32)) + +acc_pose = torch.tensor(avg_acc, device=keypoint_labels.device) +losses.update(acc_pose=acc_pose) +``` + +每个 batch 的数据都打包成了 `batch_data_samples`。以 Regression-based 方法为例,训练所需的归一化的坐标值和关键点权重可以用如下方式获取: + +```Python +keypoint_labels = torch.cat( + [d.gt_instance_labels.keypoint_labels for d in batch_data_samples]) +keypoint_weights = torch.cat([ + d.gt_instance_labels.keypoint_weights for d in batch_data_samples +]) +``` + +以下为 [RegressionHead](https://github.com/open-mmlab/mmpose/blob/main/mmpose/models/heads/regression_heads/regression_head.py) 中完整的 `loss()` 实现: + +```Python +def loss(self, + inputs: Tuple[Tensor], + batch_data_samples: OptSampleList, + train_cfg: ConfigType = {}) -> dict: + """Calculate losses from a batch of inputs and data samples.""" + + pred_outputs = self.forward(inputs) + + keypoint_labels = torch.cat( + [d.gt_instance_labels.keypoint_labels for d in batch_data_samples]) + keypoint_weights = torch.cat([ + d.gt_instance_labels.keypoint_weights for d in batch_data_samples + ]) + + # calculate losses + losses = dict() + loss = self.loss_module(pred_outputs, keypoint_labels, + keypoint_weights.unsqueeze(-1)) + + if isinstance(loss, dict): + losses.update(loss) + else: + losses.update(loss_kpt=loss) + + # calculate accuracy + _, avg_acc, _ = keypoint_pck_accuracy( + pred=to_numpy(pred_outputs), + gt=to_numpy(keypoint_labels), + mask=to_numpy(keypoint_weights) > 0, + thr=0.05, + norm_factor=np.ones((pred_outputs.size(0), 2), dtype=np.float32)) + acc_pose = torch.tensor(avg_acc, device=keypoint_labels.device) + losses.update(acc_pose=acc_pose) + + return losses +``` + +```{note} +如果你想了解更多模型实现的内容,如: +- 支持关键点可见性预测的头部 +- 2D-to-3D 模型实现 + +请前往 [【进阶教程 - 实现新模型】](./advanced_guides/implement_new_models.md) +``` diff --git a/docs/zh_cn/index.rst b/docs/zh_cn/index.rst new file mode 100644 index 0000000000000000000000000000000000000000..c51daaa0537c881145e2633c38593577c03e891d --- /dev/null +++ b/docs/zh_cn/index.rst @@ -0,0 +1,117 @@ +欢迎来到 MMPose 中文文档! +================================== + +您可以在页面左下角切换文档语言。 + +You can change the documentation language at the lower-left corner of the page. + +.. toctree:: + :maxdepth: 1 + :caption: 开启 MMPose 之旅 + + overview.md + installation.md + guide_to_framework.md + demos.md + contribution_guide.md + faq.md + +.. toctree:: + :maxdepth: 1 + :caption: 用户教程 + + user_guides/inference.md + user_guides/configs.md + user_guides/prepare_datasets.md + user_guides/train_and_test.md + user_guides/how_to_deploy.md + user_guides/model_analysis.md + user_guides/dataset_tools.md + +.. toctree:: + :maxdepth: 1 + :caption: 进阶教程 + + advanced_guides/codecs.md + advanced_guides/dataflow.md + advanced_guides/implement_new_models.md + advanced_guides/customize_datasets.md + advanced_guides/customize_transforms.md + advanced_guides/customize_evaluation.md + advanced_guides/customize_optimizer.md + advanced_guides/customize_logging.md + +.. toctree:: + :maxdepth: 1 + :caption: 1.x 版本迁移指南 + + migration.md + +.. toctree:: + :maxdepth: 2 + :caption: 模型库 + + model_zoo.txt + model_zoo/body_2d_keypoint.md + model_zoo/body_3d_keypoint.md + model_zoo/face_2d_keypoint.md + model_zoo/hand_2d_keypoint.md + model_zoo/wholebody_2d_keypoint.md + model_zoo/animal_2d_keypoint.md + +.. toctree:: + :maxdepth: 2 + :caption: 模型库(按论文整理) + + model_zoo_papers/algorithms.md + model_zoo_papers/backbones.md + model_zoo_papers/techniques.md + model_zoo_papers/datasets.md + +.. toctree:: + :maxdepth: 2 + :caption: 数据集 + + dataset_zoo.md + dataset_zoo/2d_body_keypoint.md + dataset_zoo/2d_wholebody_keypoint.md + dataset_zoo/2d_face_keypoint.md + dataset_zoo/2d_hand_keypoint.md + dataset_zoo/2d_fashion_landmark.md + dataset_zoo/2d_animal_keypoint.md + dataset_zoo/3d_body_keypoint.md + dataset_zoo/3d_hand_keypoint.md + +.. toctree:: + :maxdepth: 1 + :caption: 相关项目 + + projects/community_projects.md + +.. toctree:: + :maxdepth: 1 + :caption: 其他说明 + + notes/ecosystem.md + notes/changelog.md + notes/benchmark.md + notes/pytorch_2.md + +.. toctree:: + :maxdepth: 1 + :caption: API 参考文档 + + api.rst + +.. toctree:: + :caption: 切换语言 + + switch_language.md + + + +索引与表格 +================== + +* :ref:`genindex` +* :ref:`search` diff --git a/docs/zh_cn/installation.md b/docs/zh_cn/installation.md new file mode 100644 index 0000000000000000000000000000000000000000..9343bc2e9985b3f63b08cff5c3e740ca10a5b9f2 --- /dev/null +++ b/docs/zh_cn/installation.md @@ -0,0 +1,266 @@ +# 安装 + +我们推荐用户按照我们的最佳实践来安装 MMPose。但除此之外,如果您想根据 +您的习惯完成安装流程,也可以参见 [自定义安装](#自定义安装) 一节来获取更多信息。 + +- [安装](#安装) + - [依赖环境](#依赖环境) + - [最佳实践](#最佳实践) + - [从源码安装 MMPose](#从源码安装-mmpose) + - [作为 Python 包安装](#作为-python-包安装) + - [验证安装](#验证安装) + - [自定义安装](#自定义安装) + - [CUDA 版本](#cuda-版本) + - [不使用 MIM 安装 MMEngine](#不使用-mim-安装-mmengine) + - [在 CPU 环境中安装](#在-cpu-环境中安装) + - [在 Google Colab 中安装](#在-google-colab-中安装) + - [通过 Docker 使用 MMPose](#通过-docker-使用-mmpose) + - [故障解决](#故障解决) + +## 依赖环境 + +在本节中,我们将演示如何准备 PyTorch 相关的依赖环境。 + +MMPose 适用于 Linux、Windows 和 macOS。它需要 Python 3.7+、CUDA 9.2+ 和 PyTorch 1.8+。 + +如果您对配置 PyTorch 环境已经很熟悉,并且已经完成了配置,可以直接进入下一节:[安装](#安装-mmpose)。否则,请依照以下步骤完成配置。 + +**第 1 步** 从[官网](https://docs.conda.io/en/latest/miniconda.html) 下载并安装 Miniconda。 + +**第 2 步** 创建一个 conda 虚拟环境并激活它。 + +```shell +conda create --name openmmlab python=3.8 -y +conda activate openmmlab +``` + +**第 3 步** 按照[官方指南](https://pytorch.org/get-started/locally/) 安装 PyTorch。例如: + +在 GPU 平台: + +```shell +conda install pytorch torchvision -c pytorch +``` + +```{warning} +以上命令会自动安装最新版的 PyTorch 与对应的 cudatoolkit,请检查它们是否与您的环境匹配。 +``` + +在 CPU 平台: + +```shell +conda install pytorch torchvision cpuonly -c pytorch +``` + +**第 4 步** 使用 [MIM](https://github.com/open-mmlab/mim) 安装 [MMEngine](https://github.com/open-mmlab/mmengine) 和 [MMCV](https://github.com/open-mmlab/mmcv/tree/2.x) + +```shell +pip install -U openmim +mim install mmengine +mim install "mmcv>=2.0.1" +``` + +请注意,MMPose 中的一些推理示例脚本需要使用 [MMDetection](https://github.com/open-mmlab/mmdetection) (mmdet) 检测人体。如果您想运行这些示例脚本,可以通过运行以下命令安装 mmdet: + +```shell +mim install "mmdet>=3.1.0" +``` + +```{note} +新旧版本 mmpose、mmdet、mmcv 的对应关系为: + +- mmdet 2.x <=> mmpose 0.x <=> mmcv 1.x +- mmdet 3.x <=> mmpose 1.x <=> mmcv 2.x + +如果遇到版本不兼容的问题,请使用 `pip list | grep mm` 检查对应关系后,升级或降级相关依赖。注意,`mmcv-full` 只对应旧版本 `mmcv 1.x`,所以请先卸载它后,再通过 `mim install mmcv` 来安装 `mmcv 2.x`。 +``` + +## 最佳实践 + +根据具体需求,我们支持两种安装模式: 从源码安装(推荐)和作为 Python 包安装 + +### 从源码安装(推荐) + +如果基于 MMPose 框架开发自己的任务,需要添加新的功能,比如新的模型或是数据集,或者使用我们提供的各种工具。从源码按如下方式安装 mmpose: + +```shell +git clone https://github.com/open-mmlab/mmpose.git +cd mmpose +pip install -r requirements.txt +pip install -v -e . +# "-v" 表示输出更多安装相关的信息 +# "-e" 表示以可编辑形式安装,这样可以在不重新安装的情况下,让本地修改直接生效 +``` + +### 作为 Python 包安装 + +如果只是希望调用 MMPose 的接口,或者在自己的项目中导入 MMPose 中的模块。直接使用 mim 安装即可。 + +```shell +mim install "mmpose>=1.1.0" +``` + +## 验证安装 + +为了验证 MMPose 是否安装正确,您可以通过以下步骤运行模型推理。 + +**第 1 步** 我们需要下载配置文件和模型权重文件 + +```shell +mim download mmpose --config td-hm_hrnet-w48_8xb32-210e_coco-256x192 --dest . +``` + +下载过程往往需要几秒或更多的时间,这取决于您的网络环境。完成之后,您会在当前目录下找到这两个文件:`td-hm_hrnet-w48_8xb32-210e_coco-256x192.py` 和 `td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth`, 分别是配置文件和对应的模型权重文件。 + +**第 2 步** 验证推理示例 + +如果您是**从源码安装**的 mmpose,可以直接运行以下命令进行验证: + +```shell +python demo/image_demo.py \ + tests/data/coco/000000000785.jpg \ + td-hm_hrnet-w48_8xb32-210e_coco-256x192.py \ + td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth \ + --out-file vis_results.jpg \ + --draw-heatmap +``` + +如果一切顺利,您将会得到这样的可视化结果: + + + +代码会将预测的关键点和热图绘制在图像中的人体上,并保存到当前文件夹下的 `vis_results.jpg`。 + +如果您是**作为 Python 包安装**,可以打开您的 Python 解释器,复制并粘贴如下代码: + +```python +from mmpose.apis import inference_topdown, init_model +from mmpose.utils import register_all_modules + +register_all_modules() + +config_file = 'td-hm_hrnet-w48_8xb32-210e_coco-256x192.py' +checkpoint_file = 'td-hm_hrnet-w48_8xb32-210e_coco-256x192-0e67c616_20220913.pth' +model = init_model(config_file, checkpoint_file, device='cpu') # or device='cuda:0' + +# 请准备好一张带有人体的图片 +results = inference_topdown(model, 'demo.jpg') +``` + +示例图片 `demo.jpg` 可以从 [Github](https://raw.githubusercontent.com/open-mmlab/mmpose/main/tests/data/coco/000000000785.jpg) 下载。 +推理结果是一个 `PoseDataSample` 列表,预测结果将会保存在 `pred_instances` 中,包括检测到的关键点位置和置信度。 + +```{note} +MMCV 版本与 PyTorch 版本需要严格对应,如果遇到如下问题: + +- No module named 'mmcv.ops' +- No module named 'mmcv._ext' + +说明当前环境中的 PyTorch 版本与 CUDA 版本不匹配。你可以通过 `nvidia-smi` 查看 CUDA 版本,需要与 `pip list | grep torch` 中 PyTorch 的 `+cu1xx` 对应,否则,你需要先卸载 PyTorch 并重新安装,然后重新安装 MMCV(这里的安装顺序**不可以**交换)。 +``` + +## 自定义安装 + +### CUDA 版本 + +安装 PyTorch 时,需要指定 CUDA 版本。如果您不清楚选择哪个,请遵循我们的建议: + +- 对于 Ampere 架构的 NVIDIA GPU,例如 GeForce 30 系列 以及 NVIDIA A100,CUDA 11 是必需的。 +- 对于更早的 NVIDIA GPU,CUDA 11 是向后兼容 (backward compatible) 的,但 CUDA 10.2 能够提供更好的兼容性,也更加轻量。 + +请确保您的 GPU 驱动版本满足最低的版本需求,参阅[这张表](https://docs.nvidia.com/cuda/cuda-toolkit-release-notes/index.html#cuda-major-component-versions__table-cuda-toolkit-driver-versions)。 + +```{note} +如果按照我们的最佳实践进行安装,CUDA 运行时库就足够了,因为我们提供相关 CUDA 代码的预编译,您不需要进行本地编译。 +但如果您希望从源码进行 MMCV 的编译,或是进行其他 CUDA 算子的开发,那么就必须安装完整的 CUDA 工具链,参见 +[NVIDIA 官网](https://developer.nvidia.com/cuda-downloads),另外还需要确保该 CUDA 工具链的版本与 PyTorch 安装时 +的配置相匹配(如用 `conda install` 安装 PyTorch 时指定的 cudatoolkit 版本)。 +``` + +### 不使用 MIM 安装 MMEngine + +若不使用 mim 安装 MMEngine,请遵循 [ MMEngine 安装指南](https://mmengine.readthedocs.io/zh_CN/latest/get_started/installation.html). + +例如,您可以通过以下命令安装 MMEngine: + +```shell +pip install mmengine +``` + +### 不使用 MIM 安装 MMCV + +MMCV 包含 C++ 和 CUDA 扩展,因此其对 PyTorch 的依赖比较复杂。MIM 会自动解析这些 +依赖,选择合适的 MMCV 预编译包,使安装更简单,但它并不是必需的。 + +若不使用 mim 来安装 MMCV,请遵照 [MMCV 安装指南](https://mmcv.readthedocs.io/zh_CN/2.x/get_started/installation.html)。 +它需要您用指定 url 的形式手动指定对应的 PyTorch 和 CUDA 版本。 + +举个例子,如下命令将会安装基于 PyTorch 1.10.x 和 CUDA 11.3 编译的 mmcv。 + +```shell +pip install 'mmcv>=2.0.1' -f https://download.openmmlab.com/mmcv/dist/cu113/torch1.10/index.html +``` + +### 在 CPU 环境中安装 + +MMPose 可以仅在 CPU 环境中安装,在 CPU 模式下,您可以完成训练、测试和模型推理等所有操作。 + +在 CPU 模式下,MMCV 的部分功能将不可用,通常是一些 GPU 编译的算子,如 `Deformable Convolution`。MMPose 中大部分的模型都不会依赖这些算子,但是如果您尝试使用包含这些算子的模型来运行训练、测试或推理,将会报错。 + +### 在 Google Colab 中安装 + +[Google Colab](https://colab.research.google.com/) 通常已经包含了 PyTorch 环境,因此我们只需要安装 MMEngine, MMCV 和 MMPose 即可,命令如下: + +**第 1 步** 使用 [MIM](https://github.com/open-mmlab/mim) 安装 [MMEngine](https://github.com/open-mmlab/mmengine) 和 [MMCV](https://github.com/open-mmlab/mmcv/tree/2.x) + +```shell +!pip3 install openmim +!mim install mmengine +!mim install "mmcv>=2.0.1" +``` + +**第 2 步** 从源码安装 mmpose + +```shell +!git clone https://github.com/open-mmlab/mmpose.git +%cd mmpose +!pip install -e . +``` + +**第 3 步** 验证 + +```python +import mmpose +print(mmpose.__version__) +# 预期输出: 1.1.0 +``` + +```{note} +在 Jupyter 中,感叹号 `!` 用于执行外部命令,而 `%cd` 是一个[魔术命令](https://ipython.readthedocs.io/en/stable/interactive/magics.html#magic-cd),用于切换 Python 的工作路径。 +``` + +### 通过 Docker 使用 MMPose + +MMPose 提供 [Dockerfile](https://github.com/open-mmlab/mmpose/blob/master/docker/Dockerfile) +用于构建镜像。请确保您的 [Docker 版本](https://docs.docker.com/engine/install/) >=19.03。 + +```shell +# 构建默认的 PyTorch 1.8.0,CUDA 10.1 版本镜像 +# 如果您希望使用其他版本,请修改 Dockerfile +docker build -t mmpose docker/ +``` + +**注意**:请确保您已经安装了 [nvidia-container-toolkit](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker)。 + +用以下命令运行 Docker 镜像: + +```shell +docker run --gpus all --shm-size=8g -it -v {DATA_DIR}:/mmpose/data mmpose +``` + +`{DATA_DIR}` 是您本地存放用于 MMPose 训练、测试、推理等流程的数据目录。 + +## 故障解决 + +如果您在安装过程中遇到了什么问题,请先查阅[常见问题](faq.md)。如果没有找到解决方法,可以在 GitHub +上[提出 issue](https://github.com/open-mmlab/mmpose/issues/new/choose)。 diff --git a/docs/zh_cn/make.bat b/docs/zh_cn/make.bat new file mode 100644 index 0000000000000000000000000000000000000000..922152e96a04a242e6fc40f124261d74890617d8 --- /dev/null +++ b/docs/zh_cn/make.bat @@ -0,0 +1,35 @@ +@ECHO OFF + +pushd %~dp0 + +REM Command file for Sphinx documentation + +if "%SPHINXBUILD%" == "" ( + set SPHINXBUILD=sphinx-build +) +set SOURCEDIR=. +set BUILDDIR=_build + +if "%1" == "" goto help + +%SPHINXBUILD% >NUL 2>NUL +if errorlevel 9009 ( + echo. + echo.The 'sphinx-build' command was not found. Make sure you have Sphinx + echo.installed, then set the SPHINXBUILD environment variable to point + echo.to the full path of the 'sphinx-build' executable. Alternatively you + echo.may add the Sphinx directory to PATH. + echo. + echo.If you don't have Sphinx installed, grab it from + echo.http://sphinx-doc.org/ + exit /b 1 +) + +%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O% +goto end + +:help +%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O% + +:end +popd diff --git a/docs/zh_cn/merge_docs.sh b/docs/zh_cn/merge_docs.sh new file mode 100644 index 0000000000000000000000000000000000000000..258141d5f8730f514ab8803685a382ff5f7e0ca0 --- /dev/null +++ b/docs/zh_cn/merge_docs.sh @@ -0,0 +1,31 @@ +#!/usr/bin/env bash +# Copyright (c) OpenMMLab. All rights reserved. + +sed -i '$a\\n' ../../demo/docs/zh_cn/*_demo.md +cat ../../demo/docs/zh_cn/*_demo.md | sed "s/^## 2D\(.*\)Demo/##\1Estimation/" | sed "s/md###t/html#t/g" | sed '1i\# Demos\n' | sed 's=](/docs/en/=](/=g' | sed 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' >demos.md + + # remove /docs/ for link used in doc site +sed -i 's=](/docs/zh_cn/=](=g' overview.md +sed -i 's=](/docs/zh_cn/=](=g' installation.md +sed -i 's=](/docs/zh_cn/=](=g' quick_run.md +sed -i 's=](/docs/zh_cn/=](=g' migration.md +sed -i 's=](/docs/zh_cn/=](=g' ./model_zoo/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./model_zoo_papers/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./user_guides/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./advanced_guides/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./dataset_zoo/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./notes/*.md +sed -i 's=](/docs/zh_cn/=](=g' ./projects/*.md + + +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' overview.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' installation.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' quick_run.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' migration.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./advanced_guides/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./model_zoo/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./model_zoo_papers/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./user_guides/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./dataset_zoo/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./notes/*.md +sed -i 's=](/=](https://github.com/open-mmlab/mmpose/tree/dev-1.x/=g' ./projects/*.md diff --git a/docs/zh_cn/migration.md b/docs/zh_cn/migration.md new file mode 100644 index 0000000000000000000000000000000000000000..b30ed4d6805790e39eec2dc667dc7913e303eaf6 --- /dev/null +++ b/docs/zh_cn/migration.md @@ -0,0 +1,205 @@ +# MMPose 0.X 兼容性说明 + +MMPose 1.0 经过了大规模重构并解决了许多遗留问题,对于 0.x 版本的大部分代码 MMPose 1.0 将不兼容。 + +## 数据变换 + +### 平移、旋转和缩放 + +旧版的数据变换方法 `TopDownRandomShiftBboxCenter` 和 `TopDownGetRandomScaleRotation`,将被合并为 `RandomBBoxTransform`: + +```Python +@TRANSFORMS.register_module() +class RandomBBoxTransform(BaseTransform): + r"""Rnadomly shift, resize and rotate the bounding boxes. + + Required Keys: + + - bbox_center + - bbox_scale + + Modified Keys: + + - bbox_center + - bbox_scale + + Added Keys: + - bbox_rotation + + Args: + shift_factor (float): Randomly shift the bbox in range + :math:`[-dx, dx]` and :math:`[-dy, dy]` in X and Y directions, + where :math:`dx(y) = x(y)_scale \cdot shift_factor` in pixels. + Defaults to 0.16 + shift_prob (float): Probability of applying random shift. Defaults to + 0.3 + scale_factor (Tuple[float, float]): Randomly resize the bbox in range + :math:`[scale_factor[0], scale_factor[1]]`. Defaults to (0.5, 1.5) + scale_prob (float): Probability of applying random resizing. Defaults + to 1.0 + rotate_factor (float): Randomly rotate the bbox in + :math:`[-rotate_factor, rotate_factor]` in degrees. Defaults + to 80.0 + rotate_prob (float): Probability of applying random rotation. Defaults + to 0.6 + """ + + def __init__(self, + shift_factor: float = 0.16, + shift_prob: float = 0.3, + scale_factor: Tuple[float, float] = (0.5, 1.5), + scale_prob: float = 1.0, + rotate_factor: float = 80.0, + rotate_prob: float = 0.6) -> None: +``` + +### 标签生成 + +旧版用于训练标签生成的方法 `TopDownGenerateTarget` 、`TopDownGenerateTargetRegression`、`BottomUpGenerateHeatmapTarget`、`BottomUpGenerateTarget` 等将被合并为 `GenerateTarget`,而实际的生成方法由[编解码器](./user_guides/codecs.md) 提供: + +```Python +@TRANSFORMS.register_module() +class GenerateTarget(BaseTransform): + """Encode keypoints into Target. + + The generated target is usually the supervision signal of the model + learning, e.g. heatmaps or regression labels. + + Required Keys: + + - keypoints + - keypoints_visible + - dataset_keypoint_weights + + Added Keys: + + - The keys of the encoded items from the codec will be updated into + the results, e.g. ``'heatmaps'`` or ``'keypoint_weights'``. See + the specific codec for more details. + + Args: + encoder (dict | list[dict]): The codec config for keypoint encoding. + Both single encoder and multiple encoders (given as a list) are + supported + multilevel (bool): Determine the method to handle multiple encoders. + If ``multilevel==True``, generate multilevel targets from a group + of encoders of the same type (e.g. multiple :class:`MSRAHeatmap` + encoders with different sigma values); If ``multilevel==False``, + generate combined targets from a group of different encoders. This + argument will have no effect in case of single encoder. Defaults + to ``False`` + use_dataset_keypoint_weights (bool): Whether use the keypoint weights + from the dataset meta information. Defaults to ``False`` + """ + + def __init__(self, + encoder: MultiConfig, + multilevel: bool = False, + use_dataset_keypoint_weights: bool = False) -> None: +``` + +### 数据归一化 + +旧版的数据归一化操作 `NormalizeTensor` 和 `ToTensor` 方法将由 **DataPreprocessor** 模块替代,不再作为流水线的一部分,而是作为模块加入到模型前向传播中。 + +旧版用于 3D 人类姿态数据变换的方法 `GetRootCenteredPose`, `ImageCoordinateNormalization` 和 `NormalizeJointCoordinate` 等,将被合并入编码器,比如 [`ImagePoseLifting`](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/image_pose_lifting.py#L11) 和 [`VideoPoseLifting`](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/codecs/video_pose_lifting.py#L13) 等。 + +数据转换和重构操作 `PoseSequenceToTensor` 将在相应的编解码器和 [`PackPoseInputs`](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/transforms/formatting.py) 中实现。 + +## 模型兼容 + +我们对 model zoo 提供的模型权重进行了兼容性处理,确保相同的模型权重测试精度能够与 0.x 版本保持同等水平,但由于在这两个版本中存在大量处理细节的差异,推理结果可能会产生轻微的不同(精度误差小于 0.05%)。 + +对于使用 0.x 版本训练保存的模型权重,我们在预测头中提供了 `_load_state_dict_pre_hook()` 方法来将旧版的权重字典替换为新版,如果你希望将在旧版上开发的模型兼容到新版,可以参考我们的实现。 + +```Python +@MODELS.register_module() +class YourHead(BaseHead): +def __init__(self): + + ## omitted + + # Register the hook to automatically convert old version state dicts + self._register_load_state_dict_pre_hook(self._load_state_dict_pre_hook) +``` + +### Heatmap-based 方法 + +对于基于SimpleBaseline方法的模型,主要需要注意最后一层卷积层的兼容: + +```Python +def _load_state_dict_pre_hook(self, state_dict, prefix, local_meta, *args, + **kwargs): + version = local_meta.get('version', None) + + if version and version >= self._version: + return + + # convert old-version state dict + keys = list(state_dict.keys()) + for _k in keys: + if not _k.startswith(prefix): + continue + v = state_dict.pop(_k) + k = _k[len(prefix):] + # In old version, "final_layer" includes both intermediate + # conv layers (new "conv_layers") and final conv layers (new + # "final_layer"). + # + # If there is no intermediate conv layer, old "final_layer" will + # have keys like "final_layer.xxx", which should be still + # named "final_layer.xxx"; + # + # If there are intermediate conv layers, old "final_layer" will + # have keys like "final_layer.n.xxx", where the weights of the last + # one should be renamed "final_layer.xxx", and others should be + # renamed "conv_layers.n.xxx" + k_parts = k.split('.') + if k_parts[0] == 'final_layer': + if len(k_parts) == 3: + assert isinstance(self.conv_layers, nn.Sequential) + idx = int(k_parts[1]) + if idx < len(self.conv_layers): + # final_layer.n.xxx -> conv_layers.n.xxx + k_new = 'conv_layers.' + '.'.join(k_parts[1:]) + else: + # final_layer.n.xxx -> final_layer.xxx + k_new = 'final_layer.' + k_parts[2] + else: + # final_layer.xxx remains final_layer.xxx + k_new = k + else: + k_new = k + + state_dict[prefix + k_new] = v +``` + +### RLE-based 方法 + +对于基于 RLE 的模型,由于新版的 `loss` 模块更名为 `loss_module`,且 flow 模型归属在 `loss` 模块下,因此需要对权重字典中 `loss` 字段进行更改: + +```Python +def _load_state_dict_pre_hook(self, state_dict, prefix, local_meta, *args, + **kwargs): + + version = local_meta.get('version', None) + + if version and version >= self._version: + return + + # convert old-version state dict + keys = list(state_dict.keys()) + for _k in keys: + v = state_dict.pop(_k) + k = _k.lstrip(prefix) + # In old version, "loss" includes the instances of loss, + # now it should be renamed "loss_module" + k_parts = k.split('.') + if k_parts[0] == 'loss': + # loss.xxx -> loss_module.xxx + k_new = prefix + 'loss_module.' + '.'.join(k_parts[1:]) + else: + k_new = _k + + state_dict[k_new] = v +``` diff --git a/docs/zh_cn/notes/changelog.md b/docs/zh_cn/notes/changelog.md new file mode 100644 index 0000000000000000000000000000000000000000..396ea2acfcd484e66b0fab187ac67ea2ca144ac6 --- /dev/null +++ b/docs/zh_cn/notes/changelog.md @@ -0,0 +1,1336 @@ +# Changelog + +## **v1.3.1 (11/01/2024)** + +修复了用 `mim` 下载配置文件和模型权重时的 bug (详见 [Issue #2918](https://github.com/open-mmlab/mmpose/issues/2918))。 + +## **v1.3.0 (04/01/2024)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0 + +## **v1.2.0 (12/10/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.2.0 + +## **v1.1.0 (04/07/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.1.0 + +## **v1.0.0 (06/04/2023)** + +Release note: https://github.com/open-mmlab/mmpose/releases/tag/v1.0.0 + +## **v1.0.0rc1 (14/10/2022)** + +**Highlights** + +- Release RTMPose, a high-performance real-time pose estimation algorithm with cross-platform deployment and inference support. See details at the [project page](/projects/rtmpose/) +- Support several new algorithms: ViTPose (arXiv'2022), CID (CVPR'2022), DEKR (CVPR'2021) +- Add Inferencer, a convenient inference interface that perform pose estimation and visualization on images, videos and webcam streams with only one line of code +- Introduce *Project*, a new form for rapid and easy implementation of new algorithms and features in MMPose, which is more handy for community contributors + +**New Features** + +- Support RTMPose ([#1971](https://github.com/open-mmlab/mmpose/pull/1971), [#2024](https://github.com/open-mmlab/mmpose/pull/2024), [#2028](https://github.com/open-mmlab/mmpose/pull/2028), [#2030](https://github.com/open-mmlab/mmpose/pull/2030), [#2040](https://github.com/open-mmlab/mmpose/pull/2040), [#2057](https://github.com/open-mmlab/mmpose/pull/2057)) +- Support Inferencer ([#1969](https://github.com/open-mmlab/mmpose/pull/1969)) +- Support ViTPose ([#1876](https://github.com/open-mmlab/mmpose/pull/1876), [#2056](https://github.com/open-mmlab/mmpose/pull/2056), [#2058](https://github.com/open-mmlab/mmpose/pull/2058), [#2065](https://github.com/open-mmlab/mmpose/pull/2065)) +- Support CID ([#1907](https://github.com/open-mmlab/mmpose/pull/1907)) +- Support DEKR ([#1834](https://github.com/open-mmlab/mmpose/pull/1834), [#1901](https://github.com/open-mmlab/mmpose/pull/1901)) +- Support training with multiple datasets ([#1767](https://github.com/open-mmlab/mmpose/pull/1767), [#1930](https://github.com/open-mmlab/mmpose/pull/1930), [#1938](https://github.com/open-mmlab/mmpose/pull/1938), [#2025](https://github.com/open-mmlab/mmpose/pull/2025)) +- Add *project* to allow rapid and easy implementation of new models and features ([#1914](https://github.com/open-mmlab/mmpose/pull/1914)) + +**Improvements** + +- Improve documentation quality ([#1846](https://github.com/open-mmlab/mmpose/pull/1846), [#1858](https://github.com/open-mmlab/mmpose/pull/1858), [#1872](https://github.com/open-mmlab/mmpose/pull/1872), [#1899](https://github.com/open-mmlab/mmpose/pull/1899), [#1925](https://github.com/open-mmlab/mmpose/pull/1925), [#1945](https://github.com/open-mmlab/mmpose/pull/1945), [#1952](https://github.com/open-mmlab/mmpose/pull/1952), [#1990](https://github.com/open-mmlab/mmpose/pull/1990), [#2023](https://github.com/open-mmlab/mmpose/pull/2023), [#2042](https://github.com/open-mmlab/mmpose/pull/2042)) +- Support visualizing keypoint indices ([#2051](https://github.com/open-mmlab/mmpose/pull/2051)) +- Support OpenPose style visualization ([#2055](https://github.com/open-mmlab/mmpose/pull/2055)) +- Accelerate image transpose in data pipelines with tensor operation ([#1976](https://github.com/open-mmlab/mmpose/pull/1976)) +- Support auto-import modules from registry ([#1961](https://github.com/open-mmlab/mmpose/pull/1961)) +- Support keypoint partition metric ([#1944](https://github.com/open-mmlab/mmpose/pull/1944)) +- Support SimCC 1D-heatmap visualization ([#1912](https://github.com/open-mmlab/mmpose/pull/1912)) +- Support saving predictions and data metainfo in demos ([#1814](https://github.com/open-mmlab/mmpose/pull/1814), [#1879](https://github.com/open-mmlab/mmpose/pull/1879)) +- Support SimCC with DARK ([#1870](https://github.com/open-mmlab/mmpose/pull/1870)) +- Remove Gaussian blur for offset maps in UDP-regress ([#1815](https://github.com/open-mmlab/mmpose/pull/1815)) +- Refactor encoding interface of Codec for better extendibility and easier configuration ([#1781](https://github.com/open-mmlab/mmpose/pull/1781)) +- Support evaluating CocoMetric without annotation file ([#1722](https://github.com/open-mmlab/mmpose/pull/1722)) +- Improve unit tests ([#1765](https://github.com/open-mmlab/mmpose/pull/1765)) + +**Bug Fixes** + +- Fix repeated warnings from different ranks ([#2053](https://github.com/open-mmlab/mmpose/pull/2053)) +- Avoid frequent scope switching when using mmdet inference api ([#2039](https://github.com/open-mmlab/mmpose/pull/2039)) +- Remove EMA parameters and message hub data when publishing model checkpoints ([#2036](https://github.com/open-mmlab/mmpose/pull/2036)) +- Fix metainfo copying in dataset class ([#2017](https://github.com/open-mmlab/mmpose/pull/2017)) +- Fix top-down demo bug when there is no object detected ([#2007](https://github.com/open-mmlab/mmpose/pull/2007)) +- Fix config errors ([#1882](https://github.com/open-mmlab/mmpose/pull/1882), [#1906](https://github.com/open-mmlab/mmpose/pull/1906), [#1995](https://github.com/open-mmlab/mmpose/pull/1995)) +- Fix image demo failure when GUI is unavailable ([#1968](https://github.com/open-mmlab/mmpose/pull/1968)) +- Fix bug in AdaptiveWingLoss ([#1953](https://github.com/open-mmlab/mmpose/pull/1953)) +- Fix incorrect importing of RepeatDataset which is deprecated ([#1943](https://github.com/open-mmlab/mmpose/pull/1943)) +- Fix bug in bottom-up datasets that ignores images without instances ([#1752](https://github.com/open-mmlab/mmpose/pull/1752), [#1936](https://github.com/open-mmlab/mmpose/pull/1936)) +- Fix upstream dependency issues ([#1867](https://github.com/open-mmlab/mmpose/pull/1867), [#1921](https://github.com/open-mmlab/mmpose/pull/1921)) +- Fix evaluation issues and update results ([#1763](https://github.com/open-mmlab/mmpose/pull/1763), [#1773](https://github.com/open-mmlab/mmpose/pull/1773), [#1780](https://github.com/open-mmlab/mmpose/pull/1780), [#1850](https://github.com/open-mmlab/mmpose/pull/1850), [#1868](https://github.com/open-mmlab/mmpose/pull/1868)) +- Fix local registry missing warnings ([#1849](https://github.com/open-mmlab/mmpose/pull/1849)) +- Remove deprecated scripts for model deployment ([#1845](https://github.com/open-mmlab/mmpose/pull/1845)) +- Fix a bug in input transformation in BaseHead ([#1843](https://github.com/open-mmlab/mmpose/pull/1843)) +- Fix an interface mismatch with MMDetection in webcam demo ([#1813](https://github.com/open-mmlab/mmpose/pull/1813)) +- Fix a bug in heatmap visualization that causes incorrect scale ([#1800](https://github.com/open-mmlab/mmpose/pull/1800)) +- Add model metafiles ([#1768](https://github.com/open-mmlab/mmpose/pull/1768)) + +## **v1.0.0rc0 (14/10/2022)** + +**New Features** + +- Support 4 light-weight pose estimation algorithms: [SimCC](https://doi.org/10.48550/arxiv.2107.03332) (ECCV'2022), [Debias-IPR](https://openaccess.thecvf.com/content/ICCV2021/papers/Gu_Removing_the_Bias_of_Integral_Pose_Regression_ICCV_2021_paper.pdf) (ICCV'2021), [IPR](https://arxiv.org/abs/1711.08229) (ECCV'2018), and [DSNT](https://arxiv.org/abs/1801.07372v2) (ArXiv'2018) ([#1628](https://github.com/open-mmlab/mmpose/pull/1628)) + +**Migrations** + +- Add Webcam API in MMPose 1.0 ([#1638](https://github.com/open-mmlab/mmpose/pull/1638), [#1662](https://github.com/open-mmlab/mmpose/pull/1662)) @Ben-Louis +- Add codec for Associative Embedding (beta) ([#1603](https://github.com/open-mmlab/mmpose/pull/1603)) @ly015 + +**Improvements** + +- Add a colab tutorial for MMPose 1.0 ([#1660](https://github.com/open-mmlab/mmpose/pull/1660)) @Tau-J +- Add model index in config folder ([#1710](https://github.com/open-mmlab/mmpose/pull/1710), [#1709](https://github.com/open-mmlab/mmpose/pull/1709), [#1627](https://github.com/open-mmlab/mmpose/pull/1627)) @ly015, @Tau-J, @Ben-Louis +- Update and improve documentation ([#1692](https://github.com/open-mmlab/mmpose/pull/1692), [#1656](https://github.com/open-mmlab/mmpose/pull/1656), [#1681](https://github.com/open-mmlab/mmpose/pull/1681), [#1677](https://github.com/open-mmlab/mmpose/pull/1677), [#1664](https://github.com/open-mmlab/mmpose/pull/1664), [#1659](https://github.com/open-mmlab/mmpose/pull/1659)) @Tau-J, @Ben-Louis, @liqikai9 +- Improve config structures and formats ([#1651](https://github.com/open-mmlab/mmpose/pull/1651)) @liqikai9 + +**Bug Fixes** + +- Update mmengine version requirements ([#1715](https://github.com/open-mmlab/mmpose/pull/1715)) @Ben-Louis +- Update dependencies of pre-commit hooks ([#1705](https://github.com/open-mmlab/mmpose/pull/1705)) @Ben-Louis +- Fix mmcv version in DockerFile ([#1704](https://github.com/open-mmlab/mmpose/pull/1704)) +- Fix a bug in setting dataset metainfo in configs ([#1684](https://github.com/open-mmlab/mmpose/pull/1684)) @ly015 +- Fix a bug in UDP training ([#1682](https://github.com/open-mmlab/mmpose/pull/1682)) @liqikai9 +- Fix a bug in Dark decoding ([#1676](https://github.com/open-mmlab/mmpose/pull/1676)) @liqikai9 +- Fix bugs in visualization ([#1671](https://github.com/open-mmlab/mmpose/pull/1671), [#1668](https://github.com/open-mmlab/mmpose/pull/1668), [#1657](https://github.com/open-mmlab/mmpose/pull/1657)) @liqikai9, @Ben-Louis +- Fix incorrect flops calculation ([#1669](https://github.com/open-mmlab/mmpose/pull/1669)) @liqikai9 +- Fix `tensor.tile` compatibility issue for pytorch 1.6 ([#1658](https://github.com/open-mmlab/mmpose/pull/1658)) @ly015 +- Fix compatibility with `MultilevelPixelData` ([#1647](https://github.com/open-mmlab/mmpose/pull/1647)) @liqikai9 + +## **v1.0.0beta (1/09/2022)** + +We are excited to announce the release of MMPose 1.0.0beta. +MMPose 1.0.0beta is the first version of MMPose 1.x, a part of the OpenMMLab 2.0 projects. +Built upon the new [training engine](https://github.com/open-mmlab/mmengine), +MMPose 1.x unifies the interfaces of dataset, models, evaluation, and visualization with faster training and testing speed. +It also provide a general semi-supervised object detection framework, and more strong baselines. + +**Highlights** + +- **New engines**. MMPose 1.x is based on [MMEngine](https://github.com/open-mmlab/mmengine), which provides a general and powerful runner that allows more flexible customizations and significantly simplifies the entrypoints of high-level interfaces. + +- **Unified interfaces**. As a part of the OpenMMLab 2.0 projects, MMPose 1.x unifies and refactors the interfaces and internal logics of train, testing, datasets, models, evaluation, and visualization. All the OpenMMLab 2.0 projects share the same design in those interfaces and logics to allow the emergence of multi-task/modality algorithms. + +- **More documentation and tutorials**. We add a bunch of documentation and tutorials to help users get started more smoothly. Read it [here](https://mmpose.readthedocs.io/en/latest/). + +**Breaking Changes** + +In this release, we made lots of major refactoring and modifications. Please refer to the [migration guide](../migration.md) for details and migration instructions. + +## **v0.28.1 (28/07/2022)** + +This release is meant to fix the compatibility with the latest mmcv v1.6.1 + +## **v0.28.0 (06/07/2022)** + +**Highlights** + +- Support [TCFormer](https://openaccess.thecvf.com/content/CVPR2022/html/Zeng_Not_All_Tokens_Are_Equal_Human-Centric_Visual_Analysis_via_Token_CVPR_2022_paper.html) backbone, CVPR'2022 ([#1447](https://github.com/open-mmlab/mmpose/pull/1447), [#1452](https://github.com/open-mmlab/mmpose/pull/1452)) @zengwang430521 + +- Add [RLE](https://arxiv.org/abs/2107.11291) models on COCO dataset ([#1424](https://github.com/open-mmlab/mmpose/pull/1424)) @Indigo6, @Ben-Louis, @ly015 + +- Update swin models with better performance ([#1467](https://github.com/open-mmlab/mmpose/pull/1434)) @jin-s13 + +**New Features** + +- Support [TCFormer](https://openaccess.thecvf.com/content/CVPR2022/html/Zeng_Not_All_Tokens_Are_Equal_Human-Centric_Visual_Analysis_via_Token_CVPR_2022_paper.html) backbone, CVPR'2022 ([#1447](https://github.com/open-mmlab/mmpose/pull/1447), [#1452](https://github.com/open-mmlab/mmpose/pull/1452)) @zengwang430521 + +- Add [RLE](https://arxiv.org/abs/2107.11291) models on COCO dataset ([#1424](https://github.com/open-mmlab/mmpose/pull/1424)) @Indigo6, @Ben-Louis, @ly015 + +- Support layer decay optimizer constructor and learning rate decay optimizer constructor ([#1423](https://github.com/open-mmlab/mmpose/pull/1423)) @jin-s13 + +**Improvements** + +- Improve documentation quality ([#1416](https://github.com/open-mmlab/mmpose/pull/1416), [#1421](https://github.com/open-mmlab/mmpose/pull/1421), [#1423](https://github.com/open-mmlab/mmpose/pull/1423), [#1426](https://github.com/open-mmlab/mmpose/pull/1426), [#1458](https://github.com/open-mmlab/mmpose/pull/1458), [#1463](https://github.com/open-mmlab/mmpose/pull/1463)) @ly015, @liqikai9 + +- Support installation by [mim](https://github.com/open-mmlab/mim) ([#1425](https://github.com/open-mmlab/mmpose/pull/1425)) @liqikai9 + +- Support PAVI logger ([#1434](https://github.com/open-mmlab/mmpose/pull/1434)) @EvelynWang-0423 + +- Add progress bar for some demos ([#1454](https://github.com/open-mmlab/mmpose/pull/1454)) @liqikai9 + +- Webcam API supports quick device setting in terminal commands ([#1466](https://github.com/open-mmlab/mmpose/pull/1466)) @ly015 + +- Update swin models with better performance ([#1467](https://github.com/open-mmlab/mmpose/pull/1434)) @jin-s13 + +**Bug Fixes** + +- Rename `custom_hooks_config` to `custom_hooks` in configs to align with the documentation ([#1427](https://github.com/open-mmlab/mmpose/pull/1427)) @ly015 + +- Fix deadlock issue in Webcam API ([#1430](https://github.com/open-mmlab/mmpose/pull/1430)) @ly015 + +- Fix smoother configs in video 3D demo ([#1457](https://github.com/open-mmlab/mmpose/pull/1457)) @ly015 + +## **v0.27.0 (07/06/2022)** + +**Highlights** + +- Support hand gesture recognition + + - Try the demo for gesture recognition + - Learn more about the algorithm, dataset and experiment results + +- Major upgrade to the Webcam API + + - Tutorials (EN|zh_CN) + - [API Reference](https://mmpose.readthedocs.io/en/latest/api.html#mmpose-apis-webcam) + - Demo + +**New Features** + +- Support gesture recognition algorithm [MTUT](https://openaccess.thecvf.com/content_CVPR_2019/html/Abavisani_Improving_the_Performance_of_Unimodal_Dynamic_Hand-Gesture_Recognition_With_Multimodal_CVPR_2019_paper.html) CVPR'2019 and dataset [NVGesture](https://openaccess.thecvf.com/content_cvpr_2016/html/Molchanov_Online_Detection_and_CVPR_2016_paper.html) CVPR'2016 ([#1380](https://github.com/open-mmlab/mmpose/pull/1380)) @Ben-Louis + +**Improvements** + +- Upgrade Webcam API and related documents ([#1393](https://github.com/open-mmlab/mmpose/pull/1393), [#1404](https://github.com/open-mmlab/mmpose/pull/1404), [#1413](https://github.com/open-mmlab/mmpose/pull/1413)) @ly015 + +- Support exporting COCO inference result without the annotation file ([#1368](https://github.com/open-mmlab/mmpose/pull/1368)) @liqikai9 + +- Replace markdownlint with mdformat in CI to avoid the dependence on ruby [#1382](https://github.com/open-mmlab/mmpose/pull/1382) @ly015 + +- Improve documentation quality ([#1385](https://github.com/open-mmlab/mmpose/pull/1385), [#1394](https://github.com/open-mmlab/mmpose/pull/1394), [#1395](https://github.com/open-mmlab/mmpose/pull/1395), [#1408](https://github.com/open-mmlab/mmpose/pull/1408)) @chubei-oppen, @ly015, @liqikai9 + +**Bug Fixes** + +- Fix xywh->xyxy bbox conversion in dataset sanity check ([#1367](https://github.com/open-mmlab/mmpose/pull/1367)) @jin-s13 + +- Fix a bug in two-stage 3D keypoint demo ([#1373](https://github.com/open-mmlab/mmpose/pull/1373)) @ly015 + +- Fix out-dated settings in PVT configs ([#1376](https://github.com/open-mmlab/mmpose/pull/1376)) @ly015 + +- Fix myst settings for document compiling ([#1381](https://github.com/open-mmlab/mmpose/pull/1381)) @ly015 + +- Fix a bug in bbox transform ([#1384](https://github.com/open-mmlab/mmpose/pull/1384)) @ly015 + +- Fix inaccurate description of `min_keypoints` in tracking apis ([#1398](https://github.com/open-mmlab/mmpose/pull/1398)) @pallgeuer + +- Fix warning with `torch.meshgrid` ([#1402](https://github.com/open-mmlab/mmpose/pull/1402)) @pallgeuer + +- Remove redundant transformer modules from `mmpose.datasets.backbones.utils` ([#1405](https://github.com/open-mmlab/mmpose/pull/1405)) @ly015 + +## **v0.26.0 (05/05/2022)** + +**Highlights** + +- Support [RLE (Residual Log-likelihood Estimation)](https://arxiv.org/abs/2107.11291), ICCV'2021 ([#1259](https://github.com/open-mmlab/mmpose/pull/1259)) @Indigo6, @ly015 + +- Support [Swin Transformer](https://arxiv.org/abs/2103.14030), ICCV'2021 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +- Support [PVT](https://arxiv.org/abs/2102.12122), ICCV'2021 and [PVTv2](https://arxiv.org/abs/2106.13797), CVMJ'2022 ([#1343](https://github.com/open-mmlab/mmpose/pull/1343)) @zengwang430521 + +- Speed up inference and reduce CPU usage by optimizing the pre-processing pipeline ([#1320](https://github.com/open-mmlab/mmpose/pull/1320)) @chenxinfeng4, @liqikai9 + +**New Features** + +- Support [RLE (Residual Log-likelihood Estimation)](https://arxiv.org/abs/2107.11291), ICCV'2021 ([#1259](https://github.com/open-mmlab/mmpose/pull/1259)) @Indigo6, @ly015 + +- Support [Swin Transformer](https://arxiv.org/abs/2103.14030), ICCV'2021 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +- Support [PVT](https://arxiv.org/abs/2102.12122), ICCV'2021 and [PVTv2](https://arxiv.org/abs/2106.13797), CVMJ'2022 ([#1343](https://github.com/open-mmlab/mmpose/pull/1343)) @zengwang430521 + +- Support [FPN](https://openaccess.thecvf.com/content_cvpr_2017/html/Lin_Feature_Pyramid_Networks_CVPR_2017_paper.html), CVPR'2017 ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @yumendecc, @ly015 + +**Improvements** + +- Speed up inference and reduce CPU usage by optimizing the pre-processing pipeline ([#1320](https://github.com/open-mmlab/mmpose/pull/1320)) @chenxinfeng4, @liqikai9 + +- Video demo supports models that requires multi-frame inputs ([#1300](https://github.com/open-mmlab/mmpose/pull/1300)) @liqikai9, @jin-s13 + +- Update benchmark regression list ([#1328](https://github.com/open-mmlab/mmpose/pull/1328)) @ly015, @liqikai9 + +- Remove unnecessary warnings in `TopDownPoseTrack18VideoDataset` ([#1335](https://github.com/open-mmlab/mmpose/pull/1335)) @liqikai9 + +- Improve documentation quality ([#1313](https://github.com/open-mmlab/mmpose/pull/1313), [#1305](https://github.com/open-mmlab/mmpose/pull/1305)) @Ben-Louis, @ly015 + +- Update deprecating settings in configs ([#1317](https://github.com/open-mmlab/mmpose/pull/1317)) @ly015 + +**Bug Fixes** + +- Fix a bug in human skeleton grouping that may skip the matching process unexpectedly when `ignore_to_much` is True ([#1341](https://github.com/open-mmlab/mmpose/pull/1341)) @daixinghome + +- Fix a GPG key error that leads to CI failure ([#1354](https://github.com/open-mmlab/mmpose/pull/1354)) @ly015 + +- Fix bugs in distributed training script ([#1338](https://github.com/open-mmlab/mmpose/pull/1338), [#1298](https://github.com/open-mmlab/mmpose/pull/1298)) @ly015 + +- Fix an upstream bug in xtoccotools that causes incorrect AP(M) results ([#1308](https://github.com/open-mmlab/mmpose/pull/1308)) @jin-s13, @ly015 + +- Fix indentiation errors in the colab tutorial ([#1298](https://github.com/open-mmlab/mmpose/pull/1298)) @YuanZi1501040205 + +- Fix incompatible model weight initialization with other OpenMMLab codebases ([#1329](https://github.com/open-mmlab/mmpose/pull/1329)) @274869388 + +- Fix HRNet FP16 checkpoints download URL ([#1309](https://github.com/open-mmlab/mmpose/pull/1309)) @YinAoXiong + +- Fix typos in `body3d_two_stage_video_demo.py` ([#1295](https://github.com/open-mmlab/mmpose/pull/1295)) @mucozcan + +**Breaking Changes** + +- Refactor bbox processing in datasets and pipelines ([#1311](https://github.com/open-mmlab/mmpose/pull/1311)) @ly015, @Ben-Louis + +- The bbox format conversion (xywh to center-scale) and random translation are moved from the dataset to the pipeline. The comparison between new and old version is as below: + +v0.26.0v0.25.0Dataset +(e.g. [TopDownCOCODataset](https://github.com/open-mmlab/mmpose/blob/master/mmpose/datasets/datasets/top_down/topdown_coco_dataset.py)) + +... # Data sample only contains bbox rec.append({ 'bbox': obj\['clean_bbox\]\[:4\], ... }) + + + +
+
+
+对于 [Animal-Pose](https://sites.google.com/view/animal-pose/),可以从[官方网站](https://sites.google.com/view/animal-pose/)下载图像和标注。脚本 `tools/dataset_converters/parse_animalpose_dataset.py` 将原始标注转换为 MMPose 兼容的格式。预处理的[标注文件](https://download.openmmlab.com/mmpose/datasets/animalpose_annotations.tar)可用。如果您想自己生成标注,请按照以下步骤操作:
+
+1. 下载图片与标注信息并解压到 `$MMPOSE/data`,按照以下格式组织:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ │── animalpose
+ │
+ │-- VOC2012
+ │ │-- Annotations
+ │ │-- ImageSets
+ │ │-- JPEGImages
+ │ │-- SegmentationClass
+ │ │-- SegmentationObject
+ │
+ │-- animalpose_image_part2
+ │ │-- cat
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- PASCAL2011_animal_annotation
+ │ │-- cat
+ │ │ |-- 2007_000528_1.xml
+ │ │ |-- 2007_000549_1.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ │
+ │-- annimalpose_anno2
+ │ │-- cat
+ │ │ |-- ca1.xml
+ │ │ |-- ca2.xml
+ │ │ │-- ...
+ │ │-- cow
+ │ │-- dog
+ │ │-- horse
+ │ │-- sheep
+ ```
+
+2. 运行脚本
+
+ ```bash
+ python tools/dataset_converters/parse_animalpose_dataset.py
+ ```
+
+ 生成的标注文件将保存在 `$MMPOSE/data/animalpose/annotations` 中。
+
+开源作者没有提供官方的 train/val/test 划分,我们选择来自 PascalVOC 的图片作为 train & val,train+val 一共 3600 张图片,5117 个标注。其中 2798 张图片,4000 个标注用于训练,810 张图片,1117 个标注用于验证。测试集包含 1000 张图片,1000 个标注用于评估。
+
+### COFW 数据集
+
+Animal-Pose (ICCV'2019)
+ +```bibtex +@InProceedings{Cao_2019_ICCV, + author = {Cao, Jinkun and Tang, Hongyang and Fang, Hao-Shu and Shen, Xiaoyong and Lu, Cewu and Tai, Yu-Wing}, + title = {Cross-Domain Adaptation for Animal Pose Estimation}, + booktitle = {The IEEE International Conference on Computer Vision (ICCV)}, + month = {October}, + year = {2019} +} +``` + +
+
+
+对于 COFW 数据集,请从 [COFW Dataset (Color Images)](https://data.caltech.edu/records/20099) 进行下载。
+
+将 `COFW_train_color.mat` 和 `COFW_test_color.mat` 移动到 `$MMPOSE/data/cofw/`,确保它们按照以下格式组织:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+```
+
+运行 `pip install h5py` 安装依赖,然后在 `$MMPOSE` 下运行脚本:
+
+```bash
+python tools/dataset_converters/parse_cofw_dataset.py
+```
+
+最终结果为:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ │── cofw
+ |── COFW_train_color.mat
+ |── COFW_test_color.mat
+ |── annotations
+ | |── cofw_train.json
+ | |── cofw_test.json
+ |── images
+ |── 000001.jpg
+ |── 000002.jpg
+```
+
+### DeepposeKit 数据集
+
+COFW (ICCV'2013)
+ +```bibtex +@inproceedings{burgos2013robust, + title={Robust face landmark estimation under occlusion}, + author={Burgos-Artizzu, Xavier P and Perona, Pietro and Doll{\'a}r, Piotr}, + booktitle={Proceedings of the IEEE international conference on computer vision}, + pages={1513--1520}, + year={2013} +} +``` + +
+
+
+对于 [Vinegar Fly](https://github.com/jgraving/DeepPoseKit-Data),[Desert Locust](https://github.com/jgraving/DeepPoseKit-Data), 和 [Grévy’s Zebra](https://github.com/jgraving/DeepPoseKit-Data) 数据集,请从 [DeepPoseKit-Data](https://github.com/jgraving/DeepPoseKit-Data) 下载数据。
+
+`tools/dataset_converters/parse_deepposekit_dataset.py` 脚本可以将原始标注转换为 MMPose 支持的格式。我们已经转换好的标注文件可以在这里下载:
+
+- [vinegar_fly_annotations](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_annotations.tar)
+- [locust_annotations](https://download.openmmlab.com/mmpose/datasets/locust_annotations.tar)
+- [zebra_annotations](https://download.openmmlab.com/mmpose/datasets/zebra_annotations.tar)
+
+如果你希望自己转换数据,请按照以下步骤操作:
+
+1. 下载原始图片和标注,并解压到 `$MMPOSE/data`,将它们按照以下格式组织:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ |
+ |── DeepPoseKit-Data
+ | `── datasets
+ | |── fly
+ | | |── annotation_data_release.h5
+ | | |── skeleton.csv
+ | | |── ...
+ | |
+ | |── locust
+ | | |── annotation_data_release.h5
+ | | |── skeleton.csv
+ | | |── ...
+ | |
+ | `── zebra
+ | |── annotation_data_release.h5
+ | |── skeleton.csv
+ | |── ...
+ |
+ │── fly
+ `-- images
+ │-- 0.jpg
+ │-- 1.jpg
+ │-- ...
+ ```
+
+ 图片也可以在 [vinegar_fly_images](https://download.openmmlab.com/mmpose/datasets/vinegar_fly_images.tar),[locust_images](https://download.openmmlab.com/mmpose/datasets/locust_images.tar) 和[zebra_images](https://download.openmmlab.com/mmpose/datasets/zebra_images.tar) 下载。
+
+2. 运行脚本:
+
+ ```bash
+ python tools/dataset_converters/parse_deepposekit_dataset.py
+ ```
+
+ 生成的标注文件将保存在 $MMPOSE/data/fly/annotations`,`$MMPOSE/data/locust/annotations`和`$MMPOSE/data/zebra/annotations\` 中。
+
+由于官方数据集中没有提供测试集,我们随机选择了 90% 的图片用于训练,剩下的 10% 用于测试。
+
+### Macaque 数据集
+
+Desert Locust (Elife'2019)
+ +```bibtex +@article{graving2019deepposekit, + title={DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning}, + author={Graving, Jacob M and Chae, Daniel and Naik, Hemal and Li, Liang and Koger, Benjamin and Costelloe, Blair R and Couzin, Iain D}, + journal={Elife}, + volume={8}, + pages={e47994}, + year={2019}, + publisher={eLife Sciences Publications Limited} +} +``` + +
+
+
+对于 [MacaquePose](http://www2.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html) 数据集,请从 [这里](http://www2.ehub.kyoto-u.ac.jp/datasets/macaquepose/index.html) 下载数据。
+
+`tools/dataset_converters/parse_macaquepose_dataset.py` 脚本可以将原始标注转换为 MMPose 支持的格式。我们已经转换好的标注文件可以在 [这里](https://download.openmmlab.com/mmpose/datasets/macaque_annotations.tar) 下载。
+
+如果你希望自己转换数据,请按照以下步骤操作:
+
+1. 下载原始图片和标注,并解压到 `$MMPOSE/data`,将它们按照以下格式组织:
+
+ ```text
+ mmpose
+ ├── mmpose
+ ├── docs
+ ├── tests
+ ├── tools
+ ├── configs
+ `── data
+ │── macaque
+ │-- annotations.csv
+ │-- images
+ │ │-- 01418849d54b3005.jpg
+ │ │-- 0142d1d1a6904a70.jpg
+ │ │-- 01ef2c4c260321b7.jpg
+ │ │-- 020a1c75c8c85238.jpg
+ │ │-- 020b1506eef2557d.jpg
+ │ │-- ...
+ ```
+
+2. 运行脚本:
+
+ ```bash
+ python tools/dataset_converters/parse_macaquepose_dataset.py
+ ```
+
+ 生成的标注文件将保存在 `$MMPOSE/data/macaque/annotations` 中。
+
+由于官方数据集中没有提供测试集,我们随机选择了 90% 的图片用于训练,剩下的 10% 用于测试。
+
+### Human3.6M 数据集
+
+MacaquePose (bioRxiv'2020)
+ +```bibtex +@article{labuguen2020macaquepose, + title={MacaquePose: A novel ‘in the wild’macaque monkey pose dataset for markerless motion capture}, + author={Labuguen, Rollyn and Matsumoto, Jumpei and Negrete, Salvador and Nishimaru, Hiroshi and Nishijo, Hisao and Takada, Masahiko and Go, Yasuhiro and Inoue, Ken-ichi and Shibata, Tomohiro}, + journal={bioRxiv}, + year={2020}, + publisher={Cold Spring Harbor Laboratory} +} +``` + +
+
+
+对于 [Human3.6M](http://vision.imar.ro/human3.6m/description.php) 数据集,请从官网下载数据,放置到 `$MMPOSE/data/h36m` 下。
+
+然后执行 [预处理脚本](/tools/dataset_converters/preprocess_h36m.py)。
+
+```bash
+python tools/dataset_converters/preprocess_h36m.py --metadata {path to metadata.xml} --original data/h36m
+```
+
+这将在全帧率(50 FPS)和降频帧率(10 FPS)下提取相机参数和姿势注释。处理后的数据应具有以下结构:
+
+```text
+mmpose
+├── mmpose
+├── docs
+├── tests
+├── tools
+├── configs
+`── data
+ ├── h36m
+ ├── annotation_body3d
+ | ├── cameras.pkl
+ | ├── fps50
+ | | ├── h36m_test.npz
+ | | ├── h36m_train.npz
+ | | ├── joint2d_rel_stats.pkl
+ | | ├── joint2d_stats.pkl
+ | | ├── joint3d_rel_stats.pkl
+ | | `── joint3d_stats.pkl
+ | `── fps10
+ | ├── h36m_test.npz
+ | ├── h36m_train.npz
+ | ├── joint2d_rel_stats.pkl
+ | ├── joint2d_stats.pkl
+ | ├── joint3d_rel_stats.pkl
+ | `── joint3d_stats.pkl
+ `── images
+ ├── S1
+ | ├── S1_Directions_1.54138969
+ | | ├── S1_Directions_1.54138969_00001.jpg
+ | | ├── S1_Directions_1.54138969_00002.jpg
+ | | ├── ...
+ | ├── ...
+ ├── S5
+ ├── S6
+ ├── S7
+ ├── S8
+ ├── S9
+ `── S11
+```
+
+然后,标注信息需要转换为 MMPose 支持的 COCO 格式。这可以通过运行以下命令完成:
+
+```bash
+python tools/dataset_converters/h36m_to_coco.py
+```
+
+### MPII 数据集
+
+Human3.6M (TPAMI'2014)
+ +```bibtex +@article{h36m_pami, + author = {Ionescu, Catalin and Papava, Dragos and Olaru, Vlad and Sminchisescu, Cristian}, + title = {Human3.6M: Large Scale Datasets and Predictive Methods for 3D Human Sensing in Natural Environments}, + journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence}, + publisher = {IEEE Computer Society}, + volume = {36}, + number = {7}, + pages = {1325-1339}, + month = {jul}, + year = {2014} +} +``` + +
+
+
+对于 [MPII](http://human-pose.mpi-inf.mpg.de/) 数据集,请从官网下载数据,放置到 `$MMPOSE/data/mpii` 下。
+
+我们提供了一个脚本来将 `.mat` 格式的标注文件转换为 `.json` 格式。这可以通过运行以下命令完成:
+
+```shell
+python tools/dataset_converters/mat2json ${PRED_MAT_FILE} ${GT_JSON_FILE} ${OUTPUT_PRED_JSON_FILE}
+```
+
+例如:
+
+```shell
+python tools/dataset/mat2json work_dirs/res50_mpii_256x256/pred.mat data/mpii/annotations/mpii_val.json pred.json
+```
+
+### Label Studio 数据集
+
+MPII (CVPR'2014)
+ +```bibtex +@inproceedings{andriluka14cvpr, + author = {Mykhaylo Andriluka and Leonid Pishchulin and Peter Gehler and Schiele, Bernt}, + title = {2D Human Pose Estimation: New Benchmark and State of the Art Analysis}, + booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, + year = {2014}, + month = {June} +} +``` + +
+
+
+对于 [Label Studio](https://github.com/heartexlabs/label-studio/) 用户,请依照 [Label Studio 转换工具文档](./label_studio.md) 中的方法进行标注,并将结果导出为 Label Studio 标准的 `.json` 文件,将 `Labeling Interface` 中的 `Code` 保存为 `.xml` 文件。
+
+我们提供了一个脚本来将 Label Studio 标准的 `.json` 格式标注文件转换为 COCO 标准的 `.json` 格式。这可以通过运行以下命令完成:
+
+```shell
+python tools/dataset_converters/labelstudio2coco.py ${LS_JSON_FILE} ${LS_XML_FILE} ${OUTPUT_COCO_JSON_FILE}
+```
+
+例如:
+
+```shell
+python tools/dataset_converters/labelstudio2coco.py config.xml project-1-at-2023-05-13-09-22-91b53efa.json output/result.json
+```
diff --git a/docs/zh_cn/user_guides/how_to_deploy.md b/docs/zh_cn/user_guides/how_to_deploy.md
new file mode 100644
index 0000000000000000000000000000000000000000..2349fcca09536e16a0b97cdd62c1d9356e5a8233
--- /dev/null
+++ b/docs/zh_cn/user_guides/how_to_deploy.md
@@ -0,0 +1,292 @@
+# 模型精简与部署
+
+本章将介绍如何导出与部署 MMPose 训练得到的模型,包含以下内容:
+
+- [模型精简](#模型精简)
+- [使用 MMDeploy 部署](#使用-mmdeploy-部署)
+ - [MMDeploy 介绍](#mmdeploy-介绍)
+ - [模型支持列表](#模型支持列表)
+ - [安装](#安装)
+ - [模型转换](#模型转换)
+ - [如何查找 MMPose 模型对应的部署配置文件](#如何查找-mmpose-模型对应的部署配置文件)
+ - [RTMPose 模型导出示例](#rtmpose-模型导出示例)
+ - [ONNX](#onnx)
+ - [TensorRT](#tensorrt)
+ - [高级设置](#高级设置)
+ - [模型测速](#模型测速)
+ - [精度验证](#精度验证)
+
+## 模型精简
+
+在默认状态下,MMPose 训练过程中保存的 checkpoint 文件包含了模型的所有信息,包括模型结构、权重、优化器状态等。这些信息对于模型的部署来说是冗余的,因此我们需要对模型进行精简,精简后的 `.pth` 文件大小甚至能够缩小一半以上。
+
+MMPose 提供了 [tools/misc/publish_model.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/misc/publish_model.py) 来进行模型精简,使用方式如下:
+
+```shell
+python tools/misc/publish_model.py ${IN_FILE} ${OUT_FILE}
+```
+
+例如:
+
+```shell
+python tools/misc/publish_model.py ./epoch_10.pth ./epoch_10_publish.pth
+```
+
+脚本会自动对模型进行精简,并将精简后的模型保存到制定路径,并在文件名的最后加上时间戳,例如 `./epoch_10_publish-21815b2c_20230726.pth`。
+
+## 使用 MMDeploy 部署
+
+### MMDeploy 介绍
+
+MMDeploy 是 OpenMMLab 模型部署工具箱,为各算法库提供统一的部署体验。基于 MMDeploy,开发者可以轻松从 MMPose 生成指定硬件所需 SDK,省去大量适配时间。
+
+- 你可以从 [【硬件模型库】](https://platform.openmmlab.com/deploee) 直接下载 SDK 版模型(ONNX、TensorRT、ncnn 等)。
+- 同时我们也支持 [在线模型转换](https://platform.openmmlab.com/deploee/task-convert-list),从而无需本地安装 MMDeploy。
+
+更多介绍和使用指南见 [MMDeploy 文档](https://mmdeploy.readthedocs.io/zh_CN/latest/get_started.html)。
+
+### 模型支持列表
+
+| Model | Task | ONNX Runtime | TensorRT | ncnn | PPLNN | OpenVINO | CoreML | TorchScript |
+| :-------------------------------------------------------------------------------------------------------- | :------------ | :----------: | :------: | :--: | :---: | :------: | :----: | :---------: |
+| [HRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hrnet-cvpr-2019) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [MSPN](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#mspn-arxiv-2019) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [LiteHRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#litehrnet-cvpr-2021) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [Hourglass](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#hourglass-eccv-2016) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [SimCC](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#simcc-eccv-2022) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [RTMPose](https://github.com/open-mmlab/mmpose/tree/main/projects/rtmpose) | PoseDetection | Y | Y | Y | N | Y | Y | Y |
+| [YoloX-Pose](https://github.com/open-mmlab/mmpose/tree/main/projects/yolox_pose) | PoseDetection | Y | Y | N | N | Y | Y | Y |
+
+### 安装
+
+在开始部署之前,首先你需要确保正确安装了 MMPose, MMDetection, MMDeploy,相关安装教程如下:
+
+- [安装 MMPose 与 MMDetection](../installation.md)
+- [安装 MMDeploy](https://mmdeploy.readthedocs.io/zh_CN/latest/04-supported-codebases/mmpose.html)
+
+根据部署后端的不同,有的后端需要对 MMDeploy 支持的**自定义算子进行编译**,请根据需求前往对应的文档确保环境搭建正确:
+
+- [ONNX](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/onnxruntime.html)
+- [TensorRT](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/tensorrt.html)
+- [OpenVINO](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/openvino.html)
+- [ncnn](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/ncnn.html)
+- [TorchScript](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/torchscript.html)
+- [更多](https://github.com/open-mmlab/mmdeploy/tree/main/docs/zh_cn/05-supported-backends)
+
+### 模型转换
+
+在完成安装之后,你就可以开始模型部署了。通过 MMDeploy 提供的 [tools/deploy.py](https://github.com/open-mmlab/mmdeploy/blob/main/tools/deploy.py) 可以方便地将 MMPose 模型转换到不同的部署后端。
+
+使用方法如下:
+
+```shell
+python ./tools/deploy.py \
+ ${DEPLOY_CFG_PATH} \
+ ${MODEL_CFG_PATH} \
+ ${MODEL_CHECKPOINT_PATH} \
+ ${INPUT_IMG} \
+ --test-img ${TEST_IMG} \
+ --work-dir ${WORK_DIR} \
+ --calib-dataset-cfg ${CALIB_DATA_CFG} \
+ --device ${DEVICE} \
+ --log-level INFO \
+ --show \
+ --dump-info
+```
+
+参数描述:
+
+- `deploy_cfg` : mmdeploy 针对此模型的部署配置,包含推理框架类型、是否量化、输入 shape 是否动态等。配置文件之间可能有引用关系,`configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py` 是一个示例。
+
+- `model_cfg` : mm 算法库的模型配置,例如 `mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_aic-coco-256x192.py`,与 mmdeploy 的路径无关。
+
+- `checkpoint` : torch 模型路径。可以 http/https 开头,详见 mmcv.FileClient 的实现。
+
+- `img` : 模型转换时,用做测试的图像或点云文件路径。
+
+- `--test-img` : 用于测试模型的图像文件路径。默认设置成None。
+
+- `--work-dir` : 工作目录,用来保存日志和模型文件。
+
+- `--calib-dataset-cfg` : 此参数只有int8模式下生效,用于校准数据集配置文件。若在int8模式下未传入参数,则会自动使用模型配置文件中的’val’数据集进行校准。
+
+- `--device` : 用于模型转换的设备。 默认是cpu,对于 trt 可使用 cuda:0 这种形式。
+
+- `--log-level` : 设置日记的等级,选项包括'CRITICAL', 'FATAL', 'ERROR', 'WARN', 'WARNING', 'INFO', 'DEBUG', 'NOTSET'。 默认是INFO。
+
+- `--show` : 是否显示检测的结果。
+
+- `--dump-info` : 是否输出 SDK 信息。
+
+#### 如何查找 MMPose 模型对应的部署配置文件
+
+1. 所有与 MMPose 相关的部署配置文件都存放在 [configs/mmpose/](https://github.com/open-mmlab/mmdeploy/tree/main/configs/mmpose) 目录下。
+2. 部署配置文件命名遵循 `{任务}_{算法}_{部署后端}_{动态/静态}_{输入尺寸}` 。
+
+#### RTMPose 模型导出示例
+
+我们本节演示将 RTMPose 模型导出为 ONNX 和 TensorRT 格式,如果你希望了解更多内容请前往 [MMDeploy 文档](https://mmdeploy.readthedocs.io/zh_CN/latest/02-how-to-run/convert_model.html)。
+
+- ONNX 配置
+
+ - [pose-detection_simcc_onnxruntime_dynamic.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py)
+
+- TensorRT 配置
+
+ - [pose-detection_simcc_tensorrt_dynamic-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py)
+
+- 更多
+
+ | Backend | Config |
+ | :-------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+ | ncnn-fp16 | [pose-detection_simcc_ncnn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_ncnn-fp16_static-256x192.py) |
+ | CoreML | [pose-detection_simcc_coreml_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_coreml_static-256x192.py) |
+ | OpenVINO | [pose-detection_simcc_openvino_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_openvino_static-256x192.py) |
+ | RKNN | [pose-detection_simcc_rknn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_rknn-fp16_static-256x192.py) |
+
+如果你需要对部署配置进行修改,请参考 [MMDeploy config tutorial](https://mmdeploy.readthedocs.io/zh_CN/latest/02-how-to-run/write_config.html).
+
+本教程中使用的文件结构如下:
+
+```shell
+|----mmdeploy
+|----mmpose
+```
+
+##### ONNX
+
+运行如下命令:
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+# 转换 RTMPose
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # 导出 sdk info
+```
+
+默认导出模型文件为 `{work-dir}/end2end.onnx`
+
+##### TensorRT
+
+运行如下命令:
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+# 转换 RTMPose
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmpose-m \
+ --device cuda:0 \
+ --show \
+ --dump-info # 导出 sdk info
+```
+
+默认导出模型文件为 `{work-dir}/end2end.engine`
+
+如果模型顺利导出,你将会看到样例图片上的检测结果:
+
+
+
+###### 高级设置
+
+如果需要使用 TensorRT-FP16,你可以通过修改 MMDeploy config 中以下配置开启:
+
+```Python
+# in MMDeploy config
+backend_config = dict(
+ type='tensorrt',
+ common_config=dict(
+ fp16_mode=True # 打开 fp16
+ ))
+```
+
+### 模型测速
+
+如果需要测试模型在部署框架下的推理速度,MMDeploy 提供了方便的 [tools/profiler.py](https://github.com/open-mmlab/mmdeploy/blob/main/tools/profiler.py) 脚本。
+
+用户需要准备一个存放测试图片的文件夹`./test_images`,profiler 将随机从该目录下抽取图片用于模型测速。
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+python tools/profiler.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ ../test_images \
+ --model {WORK_DIR}/end2end.onnx \
+ --shape 256x192 \
+ --device cpu \
+ --warmup 50 \
+ --num-iter 200
+```
+
+测试结果如下:
+
+```shell
+01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS
+01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS
+01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS
+01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS
+01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS
+01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS
+----- Settings:
++------------+---------+
+| batch size | 1 |
+| shape | 256x192 |
+| iterations | 200 |
+| warmup | 50 |
++------------+---------+
+----- Results:
++--------+------------+---------+
+| Stats | Latency/ms | FPS |
++--------+------------+---------+
+| Mean | 11.060 | 90.412 |
+| Median | 11.852 | 84.375 |
+| Min | 7.812 | 128.007 |
+| Max | 13.690 | 73.044 |
++--------+------------+---------+
+```
+
+```{note}
+如果你希望详细了解 profiler 的更多参数设置与功能,可以前往 [Profiler 文档](https://mmdeploy.readthedocs.io/en/main/02-how-to-run/useful_tools.html#profiler)。
+```
+
+### 精度验证
+
+如果需要测试模型在部署框架下的推理精度,MMDeploy 提供了方便的 `tools/test.py` 脚本。
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+python tools/test.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ./mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ --model {PATH_TO_MODEL}/rtmpose_m.pth \
+ --device cpu
+```
+
+```{note}
+详细内容请参考 [MMDeploy 文档](https://github.com/open-mmlab/mmdeploy/blob/main/docs/zh_cn/02-how-to-run/profile_model.md)
+```
diff --git a/docs/zh_cn/user_guides/inference.md b/docs/zh_cn/user_guides/inference.md
new file mode 100644
index 0000000000000000000000000000000000000000..9fc1612e1107778dc2c9aac32ac95a84d72cdf54
--- /dev/null
+++ b/docs/zh_cn/user_guides/inference.md
@@ -0,0 +1,456 @@
+# 使用现有模型进行推理
+
+MMPose 为姿态估计提供了大量可以从 [模型库](https://mmpose.readthedocs.io/en/latest/model_zoo.html) 中找到的预测训练模型。
+
+本指南将演示**如何执行推理**,或使用训练过的模型对提供的图像或视频运行姿态估计。
+
+MMPose 提供了两种推理接口:
+
+1. 推理器:统一的推理接口
+2. 推理 API:用于更加灵活的自定义推理
+
+## 推理器:统一的推理接口
+
+MMPose 提供了一个被称为 [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 的、全面的推理 API。这个 API 使得用户得以使用所有 MMPose 支持的模型来对图像和视频进行模型推理。此外,该API可以完成推理结果自动化,并方便用户保存预测结果。
+
+### 基本用法
+
+[MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 可以在任何 Python 程序中被用来执行姿态估计任务。以下是在一个在 Python Shell 中使用预训练的人体姿态模型对给定图像进行推理的示例。
+
+```python
+from mmpose.apis import MMPoseInferencer
+
+img_path = 'tests/data/coco/000000000785.jpg' # 将img_path替换给你自己的路径
+
+# 使用模型别名创建推理器
+inferencer = MMPoseInferencer('human')
+
+# MMPoseInferencer采用了惰性推断方法,在给定输入时创建一个预测生成器
+result_generator = inferencer(img_path, show=True)
+result = next(result_generator)
+```
+
+如果一切正常,你将在一个新窗口中看到下图:
+
+
+
+`result` 变量是一个包含两个键值 `'visualization'` 和 `'predictions'` 的字典。
+
+- `'visualization'` 键对应的值是一个列表,该列表:
+ - 包含可视化结果,例如输入图像、估计姿态的标记,以及可选的预测热图。
+ - 如果没有指定 `return_vis` 参数,该列表将保持为空。
+- `'predictions'` 键对应的值是:
+ - 一个包含每个检测实例的预估关键点的列表。
+
+`result` 字典的结构如下所示:
+
+```python
+result = {
+ 'visualization': [
+ # 元素数量:batch_size(默认为1)
+ vis_image_1,
+ ...
+ ],
+ 'predictions': [
+ # 每张图像的姿态估计结果
+ # 元素数量:batch_size(默认为1)
+ [
+ # 每个检测到的实例的姿态信息
+ # 元素数量:检测到的实例数
+ {'keypoints': ..., # 实例 1
+ 'keypoint_scores': ...,
+ ...
+ },
+ {'keypoints': ..., # 实例 2
+ 'keypoint_scores': ...,
+ ...
+ },
+ ]
+ ...
+ ]
+}
+```
+
+还可以使用用于用于推断的**命令行界面工具**(CLI, command-line interface): `demo/inferencer_demo.py`。这个工具允许用户使用以下命令使用相同的模型和输入执行推理:
+
+```python
+python demo/inferencer_demo.py 'tests/data/coco/000000000785.jpg' \
+ --pose2d 'human' --show --pred-out-dir 'predictions'
+```
+
+预测结果将被保存在路径 `predictions/000000000785.json` 。作为一个API,`inferencer_demo.py` 的输入参数与 [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 的相同。前者能够处理一系列输入类型,包括以下内容:
+
+- 图像路径
+
+- 视频路径
+
+- 文件夹路径(这会导致该文件夹中的所有图像都被推断出来)
+
+- 表示图像的 numpy array (在命令行界面工具中未支持)
+
+- 表示图像的 numpy array 列表 (在命令行界面工具中未支持)
+
+- 摄像头(在这种情况下,输入参数应该设置为 `webcam` 或 `webcam:{CAMERA_ID}`)
+
+当输入对应于多个图像时,例如输入为**视频**或**文件夹**路径时,推理生成器必须被遍历,以便推理器对视频/文件夹中的所有帧/图像进行推理。以下是一个示例:
+
+```python
+folder_path = 'tests/data/coco'
+
+result_generator = inferencer(folder_path, show=True)
+results = [result for result in result_generator]
+```
+
+在这个示例中,`inferencer` 接受 `folder_path` 作为输入,并返回一个生成器对象(`result_generator`),用于生成推理结果。通过遍历 `result_generator` 并将每个结果存储在 `results` 列表中,您可以获得视频/文件夹中所有帧/图像的推理结果。
+
+### 自定义姿态估计模型
+
+[MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 提供了几种可用于自定义所使用的模型的方法:
+
+```python
+# 使用模型别名构建推理器
+inferencer = MMPoseInferencer('human')
+
+# 使用模型配置名构建推理器
+inferencer = MMPoseInferencer('td-hm_hrnet-w32_8xb64-210e_coco-256x192')
+# 使用 3D 模型配置名构建推理器
+inferencer = MMPoseInferencer(pose3d="motionbert_dstformer-ft-243frm_8xb32-120e_h36m")
+
+# 使用模型配置文件和权重文件的路径或 URL 构建推理器
+inferencer = MMPoseInferencer(
+ pose2d='configs/body_2d_keypoint/topdown_heatmap/coco/' \
+ 'td-hm_hrnet-w32_8xb64-210e_coco-256x192.py',
+ pose2d_weights='https://download.openmmlab.com/mmpose/top_down/' \
+ 'hrnet/hrnet_w32_coco_256x192-c78dce93_20200708.pth'
+)
+```
+
+模型别名的完整列表可以在模型别名部分中找到。
+
+上述代码为 2D 模型推理器的构建例子。3D 模型的推理器可以用类似的方式通过 `pose3d` 参数构建:
+
+```python
+# 使用 3D 模型别名构建推理器
+inferencer = MMPoseInferencer(pose3d="human3d")
+
+# 使用 3D 模型配置名构建推理器
+inferencer = MMPoseInferencer(pose3d="motionbert_dstformer-ft-243frm_8xb32-120e_h36m")
+
+# 使用 3D 模型配置文件和权重文件的路径或 URL 构建推理器
+inferencer = MMPoseInferencer(
+ pose3d='configs/body_3d_keypoint/motionbert/h36m/' \
+ 'motionbert_dstformer-ft-243frm_8xb32-120e_h36m.py',
+ pose3d_weights='https://download.openmmlab.com/mmpose/v1/body_3d_keypoint/' \
+ 'pose_lift/h36m/motionbert_ft_h36m-d80af323_20230531.pth'
+)
+```
+
+此外,自顶向下的姿态估计器还需要一个对象检测模型。[MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 能够推断用 MMPose 支持的数据集训练的模型的实例类型,然后构建必要的对象检测模型。用户也可以通过以下方式手动指定检测模型:
+
+```python
+# 通过别名指定检测模型
+# 可用的别名包括“human”、“hand”、“face”、“animal”、
+# 以及mmdet中定义的任何其他别名
+inferencer = MMPoseInferencer(
+ # 假设姿态估计器是在自定义数据集上训练的
+ pose2d='custom_human_pose_estimator.py',
+ pose2d_weights='custom_human_pose_estimator.pth',
+ det_model='human'
+)
+
+# 使用模型配置名称指定检测模型
+inferencer = MMPoseInferencer(
+ pose2d='human',
+ det_model='yolox_l_8x8_300e_coco',
+ det_cat_ids=[0], # 指定'human'类的类别id
+)
+
+# 使用模型配置文件和权重文件的路径或URL构建推理器
+inferencer = MMPoseInferencer(
+ pose2d='human',
+ det_model=f'{PATH_TO_MMDET}/configs/yolox/yolox_l_8x8_300e_coco.py',
+ det_weights='https://download.openmmlab.com/mmdetection/v2.0/' \
+ 'yolox/yolox_l_8x8_300e_coco/' \
+ 'yolox_l_8x8_300e_coco_20211126_140236-d3bd2b23.pth',
+ det_cat_ids=[0], # 指定'human'类的类别id
+)
+```
+
+### 转储结果
+
+在执行姿态估计推理任务之后,您可能希望保存结果以供进一步分析或处理。本节将指导您将预测的关键点和可视化结果保存到本地。
+
+要将预测保存在JSON文件中,在运行 [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 的实例 `inferencer` 时使用 `pred_out_dir` 参数:
+
+```python
+result_generator = inferencer(img_path, pred_out_dir='predictions')
+result = next(result_generator)
+```
+
+预测结果将以 JSON 格式保存在 `predictions/` 文件夹中,每个文件以相应的输入图像或视频的名称命名。
+
+对于更高级的场景,还可以直接从 `inferencer` 返回的 `result` 字典中访问预测结果。其中,`predictions` 包含输入图像或视频中每个单独实例的预测关键点列表。然后,您可以使用您喜欢的方法操作或存储这些结果。
+
+请记住,如果你想将可视化图像和预测文件保存在一个文件夹中,你可以使用 `out_dir` 参数:
+
+```python
+result_generator = inferencer(img_path, out_dir='output')
+result = next(result_generator)
+```
+
+在这种情况下,可视化图像将保存在 `output/visualization/` 文件夹中,而预测将存储在 `output/forecasts/` 文件夹中。
+
+### 可视化
+
+推理器 `inferencer` 可以自动对输入的图像或视频进行预测。可视化结果可以显示在一个新的窗口中,并保存在本地。
+
+要在新窗口中查看可视化结果,请使用以下代码:
+
+请注意:
+
+- 如果输入视频来自网络摄像头,默认情况下将在新窗口中显示可视化结果,以此让用户看到输入
+
+- 如果平台上没有 GUI,这个步骤可能会卡住
+
+要将可视化结果保存在本地,可以像这样指定`vis_out_dir`参数:
+
+```python
+result_generator = inferencer(img_path, vis_out_dir='vis_results')
+result = next(result_generator)
+```
+
+输入图片或视频的可视化预测结果将保存在 `vis_results/` 文件夹中
+
+在开头展示的滑雪图中,姿态的可视化估计结果由关键点(用实心圆描绘)和骨架(用线条表示)组成。这些视觉元素的默认大小可能不会产生令人满意的结果。用户可以使用 `radius` 和 `thickness` 参数来调整圆的大小和线的粗细,如下所示:
+
+```python
+result_generator = inferencer(img_path, show=True, radius=4, thickness=2)
+result = next(result_generator)
+```
+
+### 推理器参数
+
+[MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 提供了各种自定义姿态估计、可视化和保存预测结果的参数。下面是初始化推理器时可用的参数列表及对这些参数的描述:
+
+| Argument | Description |
+| ---------------- | ------------------------------------------------------------ |
+| `pose2d` | 指定 2D 姿态估计模型的模型别名、配置文件名称或配置文件路径。 |
+| `pose2d_weights` | 指定 2D 姿态估计模型权重文件的URL或本地路径。 |
+| `pose3d` | 指定 3D 姿态估计模型的模型别名、配置文件名称或配置文件路径。 |
+| `pose3d_weights` | 指定 3D 姿态估计模型权重文件的URL或本地路径。 |
+| `det_model` | 指定对象检测模型的模型别名、配置文件名或配置文件路径。 |
+| `det_weights` | 指定对象检测模型权重文件的 URL 或本地路径。 |
+| `det_cat_ids` | 指定与要检测的对象类对应的类别 id 列表。 |
+| `device` | 执行推理的设备。如果为 `None`,推理器将选择最合适的一个。 |
+| `scope` | 定义模型模块的名称空间 |
+
+推理器被设计用于可视化和保存预测。以下表格列出了在使用 [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 进行推断时可用的参数列表,以及它们与 2D 和 3D 推理器的兼容性:
+
+| 参数 | 描述 | 2D | 3D |
+| ------------------------- | -------------------------------------------------------------------------------------------------------------------------- | --- | --- |
+| `show` | 控制是否在弹出窗口中显示图像或视频。 | ✔️ | ✔️ |
+| `radius` | 设置可视化关键点的半径。 | ✔️ | ✔️ |
+| `thickness` | 确定可视化链接的厚度。 | ✔️ | ✔️ |
+| `kpt_thr` | 设置关键点分数阈值。分数超过此阈值的关键点将被显示。 | ✔️ | ✔️ |
+| `draw_bbox` | 决定是否显示实例的边界框。 | ✔️ | ✔️ |
+| `draw_heatmap` | 决定是否绘制预测的热图。 | ✔️ | ❌ |
+| `black_background` | 决定是否在黑色背景上显示预估的姿势。 | ✔️ | ❌ |
+| `skeleton_style` | 设置骨架样式。可选项包括 'mmpose'(默认)和 'openpose'。 | ✔️ | ❌ |
+| `use_oks_tracking` | 决定是否在追踪中使用OKS作为相似度测量。 | ❌ | ✔️ |
+| `tracking_thr` | 设置追踪的相似度阈值。 | ❌ | ✔️ |
+| `disable_norm_pose_2d` | 决定是否将边界框缩放至数据集的平均边界框尺寸,并将边界框移至数据集的平均边界框中心。 | ❌ | ✔️ |
+| `disable_rebase_keypoint` | 决定是否将最低关键点的高度置为 0。 | ❌ | ✔️ |
+| `num_instances` | 设置可视化结果中显示的实例数量。如果设置为负数,则所有实例的结果都会可视化。 | ❌ | ✔️ |
+| `return_vis` | 决定是否在结果中包含可视化图像。 | ✔️ | ✔️ |
+| `vis_out_dir` | 定义保存可视化图像的文件夹路径。如果未设置,将不保存可视化图像。 | ✔️ | ✔️ |
+| `return_datasamples` | 决定是否以 `PoseDataSample` 格式返回预测。 | ✔️ | ✔️ |
+| `pred_out_dir` | 指定保存预测的文件夹路径。如果未设置,将不保存预测。 | ✔️ | ✔️ |
+| `out_dir` | 如果 `vis_out_dir` 或 `pred_out_dir` 未设置,它们将分别设置为 `f'{out_dir}/visualization'` 或 `f'{out_dir}/predictions'`。 | ✔️ | ✔️ |
+
+### 模型别名
+
+MMPose 为常用模型提供了一组预定义的别名。在初始化 [MMPoseInferencer](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/apis/inferencers/mmpose_inferencer.py#L24) 时,这些别名可以用作简略的表达方式,而不是指定完整的模型配置名称。下面是可用的模型别名及其对应的配置名称的列表:
+
+| 别名 | 配置文件名称 | 对应任务 | 姿态估计模型 | 检测模型 |
+| --------- | -------------------------------------------------- | ---------------- | ------------- | ------------------- |
+| animal | rtmpose-m_8xb64-210e_ap10k-256x256 | 动物姿态估计 | RTMPose-m | RTMDet-m |
+| human | rtmpose-m_8xb256-420e_body8-256x192 | 人体姿态估计 | RTMPose-m | RTMDet-m |
+| body26 | rtmpose-m_8xb512-700e_body8-halpe26-256x192 | 人体姿态估计 | RTMPose-m | RTMDet-m |
+| face | rtmpose-m_8xb256-120e_face6-256x256 | 人脸关键点检测 | RTMPose-m | yolox-s |
+| hand | rtmpose-m_8xb256-210e_hand5-256x256 | 手部关键点检测 | RTMPose-m | ssdlite_mobilenetv2 |
+| wholebody | rtmpose-m_8xb64-270e_coco-wholebody-256x192 | 人体全身姿态估计 | RTMPose-m | RTMDet-m |
+| vitpose | td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192 | 人体姿态估计 | ViTPose-base | RTMDet-m |
+| vitpose-s | td-hm_ViTPose-small-simple_8xb64-210e_coco-256x192 | 人体姿态估计 | ViTPose-small | RTMDet-m |
+| vitpose-b | td-hm_ViTPose-base-simple_8xb64-210e_coco-256x192 | 人体姿态估计 | ViTPose-base | RTMDet-m |
+| vitpose-l | td-hm_ViTPose-large-simple_8xb64-210e_coco-256x192 | 人体姿态估计 | ViTPose-large | RTMDet-m |
+| vitpose-h | td-hm_ViTPose-huge-simple_8xb64-210e_coco-256x192 | 人体姿态估计 | ViTPose-huge | RTMDet-m |
+
+下表列出了可用的 3D 姿态估计模型别名及其对应的配置文件:
+
+| 别名 | 配置文件名称 | 对应任务 | 3D 姿态估计模型 | 2D 姿态估计模型 | 检测模型 |
+| ------- | -------------------------------------------- | ----------------- | --------------- | --------------- | -------- |
+| human3d | vid_pl_motionbert_8xb32-120e_h36m | 3D 人体姿态估计 | MotionBert | RTMPose-m | RTMDet-m |
+| hand3d | internet_res50_4xb16-20e_interhand3d-256x256 | 3D 手部关键点检测 | InterNet | - | 全图 |
+
+此外,用户可以使用命令行界面工具显示所有可用的别名,使用以下命令:
+
+```shell
+python demo/inferencer_demo.py --show-alias
+```
+
+## 推理 API:用于更加灵活的自定义推理
+
+MMPose 提供了单独的 Python API 用于不同模型的推理,这种推理方式更加灵活,但是需要用户自己处理输入和输出,因此适合于**熟悉 MMPose** 的用户。
+
+MMPose 提供的 Python 推理接口存放于 [$MMPOSE/mmpose/apis](https://github.com/open-mmlab/mmpose/tree/dev-1.x/mmpose/apis) 目录下,以下是一个构建 topdown 模型并进行推理的示例:
+
+### 构建模型
+
+```python
+from mmcv.image import imread
+
+from mmpose.apis import inference_topdown, init_model
+from mmpose.registry import VISUALIZERS
+from mmpose.structures import merge_data_samples
+
+model_cfg = 'configs/body_2d_keypoint/rtmpose/coco/rtmpose-m_8xb256-420e_coco-256x192.py'
+
+ckpt = 'https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth'
+
+device = 'cuda'
+
+# 使用初始化接口构建模型
+model = init_model(model_cfg, ckpt, device=device)
+```
+
+### 推理
+
+```python
+img_path = 'tests/data/coco/000000000785.jpg'
+
+# 单张图片推理
+batch_results = inference_topdown(model, img_path)
+```
+
+推理接口返回的结果是一个 PoseDataSample 列表,每个 PoseDataSample 对应一张图片的推理结果。PoseDataSample 的结构如下所示:
+
+```python
+[
+ Label Studio
+ +```bibtex +@misc{Label Studio, + title={{Label Studio}: Data labeling software}, + url={https://github.com/heartexlabs/label-studio}, + note={Open source software available from https://github.com/heartexlabs/label-studio}, + author={ + Maxim Tkachenko and + Mikhail Malyuk and + Andrey Holmanyuk and + Nikolai Liubimov}, + year={2020-2022}, +} +``` + ++ +有些关键点(例如“左手”)在两个数据集中都有定义,但它们具有不同的序号。具体来说,“左手”关键点在 COCO 数据集中的序号为 9,在AIC数据集中的序号为 5。此外,每个数据集都包含独特的关键点,另一个数据集中不存在。例如,面部关键点(序号为0〜4)仅在 COCO 数据集中定义,而“头顶”(序号为 12)和“颈部”(序号为 13)关键点仅在 AIC 数据集中存在。以下的维恩图显示了两个数据集中关键点之间的关系。 + +
+ +接下来,我们会介绍两种混合数据集的方式: + +- [将 AIC 合入 COCO 数据集](#将-aic-合入-coco-数据集) +- [合并 AIC 和 COCO 数据集](#合并-aic-和-coco-数据集) + +### 将 AIC 合入 COCO 数据集 + +如果用户想提高其模型在 COCO 或类似数据集上的性能,可以将 AIC 数据集作为辅助数据。此时应该仅选择 AIC 数据集中与 COCO 数据集共享的关键点,忽略其余关键点。此外,还需要将这些被选择的关键点在 AIC 数据集中的序号进行转换,以匹配在 COCO 数据集中对应关键点的序号。 + +
+ +在这种情况下,来自 COCO 的数据不需要进行转换。此时 COCO 数据集可通过如下方式配置: + +```python +dataset_coco = dict( + type='CocoDataset', + data_root='data/coco/', + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=[], # `pipeline` 应为空列表,因为 COCO 数据不需要转换 +) +``` + +对于 AIC 数据集,需要转换关键点的顺序。MMPose 提供了一个 [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) 转换器来实现这一点。以下是配置 AIC 子数据集的示例: + +```python +dataset_aic = dict( + type='AicDataset', + data_root='data/aic/', + ann_file='annotations/aic_train.json', + data_prefix=dict(img='ai_challenger_keypoint_train_20170902/' + 'keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=17, # 与 COCO 数据集关键点数一致 + mapping=[ # 需要列出所有带转换关键点的序号 + (0, 6), # 0 (AIC 中的序号) -> 6 (COCO 中的序号) + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) +``` + +[KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) 会将原序号在 0 到 11 之间的关键点的序号转换为在 5 到 16 之间的对应序号。同时,在 AIC 中序号为为 12 和 13 的关键点将被删除。另外,目标序号在 0 到 4 之间的关键点在 `mapping` 参数中没有定义,这些点将被设为不可见,并且不会在训练中使用。 + +子数据集都完成配置后, 混合数据集 [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) 可以通过如下方式配置: + +```python +dataset = dict( + type='CombinedDataset', + # 混合数据集关键点顺序和 COCO 数据集相同, + # 所以使用 COCO 数据集的描述信息 + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + # `train_pipeline` 包含了常用的数据预处理, + # 比如图片读取、数据增广等 + pipeline=train_pipeline, + # sample_ratio_factor 参数是用来调节每个子数据集 + # 在组合数据集中的样本数量比例的 + sample_ratio_factor=[1.0, 0.5] +) +``` + +MMPose 提供了一份完整的 [配置文件](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-merge.py) 来将 AIC 合入 COCO 数据集并用于训练网络。用户可以查阅这个文件以获取更多细节,或者参考这个文件来构建新的混合数据集。 + +### 合并 AIC 和 COCO 数据集 + +将 AIC 合入 COCO 数据集的过程中丢弃了部分 AIC 数据集中的标注信息。如果用户想要使用两个数据集中的所有信息,可以将两个数据集合并,即在两个数据集中取关键点的并集。 + +
+ +在这种情况下,COCO 和 AIC 数据集都需要使用 [KeypointConverter](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/transforms/converting.py#L11) 来调整它们关键点的顺序: + +```python +dataset_coco = dict( + type='CocoDataset', + data_root='data/coco/', + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=19, # 并集中有 19 个关键点 + mapping=[ + (0, 0), + (1, 1), + # 省略 + (16, 16), + ]) + ]) + +dataset_aic = dict( + type='AicDataset', + data_root='data/aic/', + ann_file='annotations/aic_train.json', + data_prefix=dict(img='ai_challenger_keypoint_train_20170902/' + 'keypoint_train_images_20170902/'), + pipeline=[ + dict( + type='KeypointConverter', + num_keypoints=19, # 并集中有 19 个关键点 + mapping=[ + (0, 6), + # 省略 + (12, 17), + (13, 18), + ]) + ], +) +``` + +合并后的数据集有 19 个关键点,这与 COCO 或 AIC 数据集都不同,因此需要一个新的数据集描述信息文件。[coco_aic.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/_base_/datasets/coco_aic.py) 是一个描述信息文件的示例,它基于 [coco.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/_base_/datasets/coco.py) 并进行了以下几点修改: + +- 添加了 AIC 数据集的文章信息; +- 在 `keypoint_info` 中添加了“头顶”和“颈部”这两个只在 AIC 中定义的关键点; +- 在 `skeleton_info` 中添加了“头顶”和“颈部”间的连线; +- 拓展 `joint_weights` 和 `sigmas` 以添加新增关键点的信息。 + +完成以上步骤后,合并数据集 [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) 可以通过以下方式配置: + +```python +dataset = dict( + type='CombinedDataset', + # 使用新的描述信息文件 + metainfo=dict(from_file='configs/_base_/datasets/coco_aic.py'), + datasets=[dataset_coco, dataset_aic], + # `train_pipeline` 包含了常用的数据预处理, + # 比如图片读取、数据增广等 + pipeline=train_pipeline, +) +``` + +此外,在使用混合数据集时,由于关键点数量的变化,模型的输出通道数也要做相应调整。如果用户用混合数据集训练了模型,但是要在 COCO 数据集上评估模型,就需要从模型输出的关键点中取出一个子集来匹配 COCO 中的关键点格式。可以通过 `test_cfg` 中的 `output_keypoint_indices` 参数自定义此子集。这个 [配置文件](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-aic-256x192-combine.py) 展示了如何用 AIC 和 COCO 合并后的数据集训练模型并在 COCO 数据集上进行测试。用户可以查阅这个文件以获取更多细节,或者参考这个文件来构建新的混合数据集。 + +## 调整混合数据集采样策略 + +在混合数据集训练中,常常面临着不同数据集的数据分布不统一问题,对此我们提供了两种不同的采样策略: + +1. 调整每个子数据集的采样比例 +2. 调整每个 batch 中每个子数据集的比例 + +### 调整每个子数据集的采样比例 + +在 [CombinedDataset](https://github.com/open-mmlab/mmpose/blob/dev-1.x/mmpose/datasets/dataset_wrappers.py#L15) 中,我们提供了 `sample_ratio_factor` 参数来调整每个子数据集的采样比例。 + +例如: + +- 如果 `sample_ratio_factor` 为 `[1.0, 0.5]`,则第一个子数据集全部数据加入训练,第二个子数据集抽样出 0.5 加入训练。 +- 如果 `sample_ratio_factor` 为 `[1.0, 2.0]`,则第一个子数据集全部数据加入训练,第二个子数据集抽样出其总数的 2 倍加入训练。 + +### 调整每个 batch 中每个子数据集的比例 + +在 [$MMPOSE/datasets/samplers.py](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/samplers.py) 中,我们提供了 [MultiSourceSampler](https://github.com/open-mmlab/mmpose/blob/main/mmpose/datasets/samplers.py#L15) 来调整每个 batch 中每个子数据集的比例。 + +例如: + +- 如果 `sample_ratio_factor` 为 `[1.0, 0.5]`,则每个 batch 中第一个子数据集的数据量为 `1.0 / (1.0 + 0.5) = 66.7%`,第二个子数据集的数据量为 `0.5 / (1.0 + 0.5) = 33.3%`。即,第一个子数据集在 batch 中的占比为第二个子数据集的 2 倍。 + +用户可以在配置文件中通过 `sampler` 参数来进行设置: + +```python +# data loaders +train_bs = 256 +train_dataloader = dict( + batch_size=train_bs, + num_workers=4, + persistent_workers=True, + sampler=dict( + type='MultiSourceSampler', + batch_size=train_bs, + # 设置子数据集比例 + source_ratio=[1.0, 0.5], + shuffle=True, + round_up=True), + dataset=dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + # 子数据集 + datasets=[sub_dataset1, sub_dataset2], + pipeline=train_pipeline, + test_mode=False, + )) +``` diff --git a/docs/zh_cn/user_guides/model_analysis.md b/docs/zh_cn/user_guides/model_analysis.md new file mode 100644 index 0000000000000000000000000000000000000000..b88755620e7e4fb17dec456e49902c82839c42d4 --- /dev/null +++ b/docs/zh_cn/user_guides/model_analysis.md @@ -0,0 +1,100 @@ +# 模型统计与分析 + +## 统计模型参数量与计算量 + +MMPose 提供了 [tools/analysis_tools/get_flops.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/analysis_tools/get_flops.py) 来统计模型的参数量与计算量。 + +```shell +python tools/analysis_tools/get_flops.py ${CONFIG_FILE} [--shape ${INPUT_SHAPE}] [--cfg-options ${CFG_OPTIONS}] +``` + +参数说明: + +`CONFIG_FILE` : 模型配置文件的路径。 + +`--shape`: 模型的输入张量形状。 + +`--input-constructor`: 如果指定为 `batch`,将会生成一个 `batch tensor` 来计算 FLOPs。 + +`--batch-size`:如果 `--input-constructor` 指定为 `batch`,将会生成一个随机 `tensor`,形状为 `(batch_size, 3, **input_shape)` 来计算 FLOPs。 + +`--cfg-options`: 如果指定,可选的 `cfg` 的键值对将会被合并到配置文件中。 + +示例: + +```shell +python tools/analysis_tools/get_flops.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py +``` + +结果如下: + +```text +============================== +Input shape: (1, 3, 256, 192) +Flops: 7.7 GFLOPs +Params: 28.54 M +============================== +``` + +```{note} +目前该工具仍处于实验阶段,我们不能保证统计结果绝对正确,一些算子(比如 GN 或自定义算子)没有被统计到 FLOPs 中。 +``` + +## 分析训练日志 + +MMPose 提供了 [tools/analysis_tools/analyze_logs.py](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tools/analysis_tools/analyze_logs.py) 来对训练日志进行简单的分析,包括: + +- 将日志绘制成损失和精度曲线图 +- 统计训练速度 + +### 绘制损失和精度曲线图 + +该功能依赖于 `seaborn`,请先运行 `pip install seaborn` 安装依赖包。 + + + +```shell +python tools/analysis_tools/analyze_logs.py plot_curve ${JSON_LOGS} [--keys ${KEYS}] [--title ${TITLE}] [--legend ${LEGEND}] [--backend ${BACKEND}] [--style ${STYLE}] [--out ${OUT_FILE}] +``` + +示例: + +- 绘制损失曲线 + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_kpt --legend loss_kpt + ``` + +- 绘制精度曲线并导出为 PDF 文件 + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys acc_pose --out results.pdf + ``` + +- 将多个日志文件绘制在同一张图上 + + ```shell + python tools/analysis_tools/analyze_logs.py plot_curve log1.json log2.json --keys loss_kpt --legend run1 run2 --title loss_kpt --out loss_kpt.png + ``` + +### 统计训练速度 + +```shell +python tools/analysis_tools/analyze_logs.py cal_train_time ${JSON_LOGS} [--include-outliers] +``` + +示例: + +```shell +python tools/analysis_tools/analyze_logs.py cal_train_time log.json +``` + +结果如下: + +```text +-----Analyze train time of hrnet_w32_256x192.json----- +slowest epoch 56, average time is 0.6924 +fastest epoch 1, average time is 0.6502 +time std over epochs is 0.0085 +average iter time: 0.6688 s/iter +``` diff --git a/docs/zh_cn/user_guides/prepare_datasets.md b/docs/zh_cn/user_guides/prepare_datasets.md new file mode 100644 index 0000000000000000000000000000000000000000..44524058191d8129f927936923658c56165e40c6 --- /dev/null +++ b/docs/zh_cn/user_guides/prepare_datasets.md @@ -0,0 +1,221 @@ +# 准备数据集 + +在这份文档将指导如何为 MMPose 准备数据集,包括使用内置数据集、创建自定义数据集、结合数据集进行训练、浏览和下载数据集。 + +## 使用内置数据集 + +**步骤一**: 准备数据 + +MMPose 支持多种任务和相应的数据集。你可以在 [数据集仓库](https://mmpose.readthedocs.io/en/latest/dataset_zoo.html) 中找到它们。为了正确准备你的数据,请按照你选择的数据集的指南进行操作。 + +**步骤二**: 在配置文件中进行数据集设置 + +在开始训练或评估模型之前,你必须配置数据集设置。以 [`td-hm_hrnet-w32_8xb64-210e_coco-256x192.py`](/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192.py) 为例,它可以用于在 COCO 数据集上训练或评估 HRNet 姿态估计器。下面我们浏览一下数据集配置: + +- 基础数据集参数 + + ```python + # base dataset settings + dataset_type = 'CocoDataset' + data_mode = 'topdown' + data_root = 'data/coco/' + ``` + + - `dataset_type` 指定数据集的类名。用户可以参考 [数据集 API](https://mmpose.readthedocs.io/en/latest/api.html#datasets) 来找到他们想要的数据集的类名。 + - `data_mode` 决定了数据集的输出格式,有两个选项可用:`'topdown'` 和 `'bottomup'`。如果 `data_mode='topdown'`,数据元素表示一个实例及其姿态;否则,一个数据元素代表一张图像,包含多个实例和姿态。 + - `data_root` 指定数据集的根目录。 + +- 数据处理流程 + + ```python + # pipelines + train_pipeline = [ + dict(type='LoadImage'), + dict(type='GetBBoxCenterScale'), + dict(type='RandomFlip', direction='horizontal'), + dict(type='RandomHalfBody'), + dict(type='RandomBBoxTransform'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='GenerateTarget', encoder=codec), + dict(type='PackPoseInputs') + ] + val_pipeline = [ + dict(type='LoadImage'), + dict(type='GetBBoxCenterScale'), + dict(type='TopdownAffine', input_size=codec['input_size']), + dict(type='PackPoseInputs') + ] + ``` + + `train_pipeline` 和 `val_pipeline` 分别定义了训练和评估阶段处理数据元素的步骤。除了加载图像和打包输入之外,`train_pipeline` 主要包含数据增强技术和目标生成器,而 `val_pipeline` 则专注于将数据元素转换为统一的格式。 + +- 数据加载器 + + ```python + # data loaders + train_dataloader = dict( + batch_size=64, + num_workers=2, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) + val_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) + test_dataloader = val_dataloader + ``` + + 这个部分是配置数据集的关键。除了前面讨论过的基础数据集参数和数据处理流程之外,这里还定义了其他重要的参数。`batch_size` 决定了每个 GPU 的 batch size;`ann_file` 指定了数据集的注释文件;`data_prefix` 指定了图像文件夹。`bbox_file` 仅在 top-down 数据集的 val/test 数据加载器中使用,用于提供检测到的边界框信息。 + +我们推荐从使用相同数据集的配置文件中复制数据集配置,而不是从头开始编写,以最小化潜在的错误。通过这样做,用户可以根据需要进行必要的修改,从而确保更可靠和高效的设置过程。 + +## 使用自定义数据集 + +[自定义数据集](../advanced_guides/customize_datasets.md) 指南提供了如何构建自定义数据集的详细信息。在本节中,我们将强调一些使用和配置自定义数据集的关键技巧。 + +- 确定数据集类名。如果你将数据集重组为 COCO 格式,你可以简单地使用 `CocoDataset` 作为 `dataset_type` 的值。否则,你将需要使用你添加的自定义数据集类的名称。 + +- 指定元信息配置文件。MMPose 1.x 采用了与 MMPose 0.x 不同的策略来指定元信息。在 MMPose 1.x 中,用户可以按照以下方式指定元信息配置文件: + + ```python + train_dataloader = dict( + ... + dataset=dict( + type=dataset_type, + data_root='root/of/your/train/data', + ann_file='path/to/your/train/json', + data_prefix=dict(img='path/to/your/train/img'), + # specify dataset meta information + metainfo=dict(from_file='configs/_base_/datasets/custom.py'), + ...), + ) + ``` + + 注意,`metainfo` 参数必须在 val/test 数据加载器中指定。 + +## 使用混合数据集进行训练 + +MMPose 提供了一个方便且多功能的解决方案,用于训练混合数据集。请参考[混合数据集训练](./mixed_datasets.md)。 + +## 浏览数据集 + +`tools/analysis_tools/browse_dataset.py` 帮助用户可视化地浏览姿态数据集,或将图像保存到指定的目录。 + +```shell +python tools/misc/browse_dataset.py ${CONFIG} [-h] [--output-dir ${OUTPUT_DIR}] [--not-show] [--phase ${PHASE}] [--mode ${MODE}] [--show-interval ${SHOW_INTERVAL}] +``` + +| ARGS | Description | +| -------------------------------- | ---------------------------------------------------------------------------------------------------------- | +| `CONFIG` | 配置文件的路径 | +| `--output-dir OUTPUT_DIR` | 保存可视化结果的目标文件夹。如果不指定,可视化的结果将不会被保存 | +| `--not-show` | 不适用外部窗口显示可视化的结果 | +| `--phase {train, val, test}` | 数据集选项 | +| `--mode {original, transformed}` | 指定可视化图片类型。 `original` 为不使用数据增强的原始图片及标注可视化; `transformed` 为经过增强后的可视化 | +| `--show-interval SHOW_INTERVAL` | 显示图片的时间间隔 | + +例如,用户想要可视化 COCO 数据集中的图像和标注,可以使用: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode original +``` + +检测框和关键点将被绘制在原始图像上。下面是一个例子: + + +原始图像在被输入模型之前需要被处理。为了可视化预处理后的图像和标注,用户需要将参数 `mode` 修改为 `transformed`。例如: + +```shell +python tools/misc/browse_dataset.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-e210_coco-256x192.py --mode transformed +``` + +这是一个处理后的样本: + + + +热图目标将与之一起可视化,如果它是在 pipeline 中生成的。 + +## 用 MIM 下载数据集 + +通过使用 [OpenXLab](https://openxlab.org.cn/datasets),您可以直接下载开源数据集。通过平台的搜索功能,您可以快速轻松地找到他们正在寻找的数据集。使用平台上的格式化数据集,您可以高效地跨数据集执行任务。 + +如果您使用 MIM 下载,请确保版本大于 v0.3.8。您可以使用以下命令进行更新、安装、登录和数据集下载: + +```shell +# upgrade your MIM +pip install -U openmim + +# install OpenXLab CLI tools +pip install -U openxlab +# log in OpenXLab +openxlab login + +# download coco2017 and preprocess by MIM +mim download mmpose --dataset coco2017 +``` + +### 已支持的数据集 + +下面是支持的数据集列表,更多数据集将在之后持续更新: + +#### 人体数据集 + +| Dataset name | Download command | +| ------------- | ----------------------------------------- | +| COCO 2017 | `mim download mmpose --dataset coco2017` | +| MPII | `mim download mmpose --dataset mpii` | +| AI Challenger | `mim download mmpose --dataset aic` | +| CrowdPose | `mim download mmpose --dataset crowdpose` | + +#### 人脸数据集 + +| Dataset name | Download command | +| ------------ | ------------------------------------ | +| LaPa | `mim download mmpose --dataset lapa` | +| 300W | `mim download mmpose --dataset 300w` | +| WFLW | `mim download mmpose --dataset wflw` | + +#### 手部数据集 + +| Dataset name | Download command | +| ------------ | ------------------------------------------ | +| OneHand10K | `mim download mmpose --dataset onehand10k` | +| FreiHand | `mim download mmpose --dataset freihand` | +| HaGRID | `mim download mmpose --dataset hagrid` | + +#### 全身数据集 + +| Dataset name | Download command | +| ------------ | ------------------------------------- | +| Halpe | `mim download mmpose --dataset halpe` | + +#### 动物数据集 + +| Dataset name | Download command | +| ------------ | ------------------------------------- | +| AP-10K | `mim download mmpose --dataset ap10k` | + +#### 服装数据集 + +Coming Soon diff --git a/docs/zh_cn/user_guides/train_and_test.md b/docs/zh_cn/user_guides/train_and_test.md new file mode 100644 index 0000000000000000000000000000000000000000..b95ae965f13ef11ad22c92e1523acbb6d487c61d --- /dev/null +++ b/docs/zh_cn/user_guides/train_and_test.md @@ -0,0 +1,511 @@ +# 训练与测试 + +## 启动训练 + +### 本地训练 + +你可以使用 `tools/train.py` 在单机上使用 CPU 或单个 GPU 训练模型。 + +```shell +python tools/train.py ${CONFIG_FILE} [ARGS] +``` + +```{note} +默认情况下,MMPose 会优先使用 GPU 而不是 CPU。如果你想在 CPU 上训练模型,请清空 `CUDA_VISIBLE_DEVICES` 或将其设置为 -1,使 GPU 对程序不可见。 +``` + +```shell +CUDA_VISIBLE_DEVICES=-1 python tools/train.py ${CONFIG_FILE} [ARGS] +``` + +| ARGS | Description | +| ------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | 配置文件路径 | +| `--work-dir WORK_DIR` | 训练日志与 checkpoint 存放目录,默认使用配置文件名作为目录存放在 `./work_dirs` 下 | +| `--resume [RESUME]` | 恢复训练,可以从指定 checkpoint 进行重启,不指定则会使用最近一次的 checkpoint | +| `--amp` | 开启混合精度训练 | +| `--no-validate` | **不建议新手开启**。 训练中不进行评测 | +| `--auto-scale-lr` | 自动根据当前设置的实际 batch size 和配置文件中的标准 batch size 进行学习率缩放 | +| `--cfg-options CFG_OPTIONS` | 对当前配置文件中的一些设置进行临时覆盖,字典 key-value 格式为 xxx=yyy。如果需要覆盖的值是一个数组,格式应当为 `key="[a,b]"` 或 `key=a,b`。也允许使用元组,如 `key="[(a,b),(c,d)]"`。注意双引号是**必须的**,且**不允许**使用空格。 | +| `--show-dir SHOW_DIR` | 验证阶段生成的可视化图片存放路径 | +| `--show` | 使用窗口显示预测的可视化结果 | +| `--interval INTERVAL` | 进行可视化的间隔(每隔多少张图可视化一张) | +| `--wait-time WAIT_TIME` | 可视化显示时每张图片的持续时间(单位:秒),默认为 1 | +| `--launcher {none,pytorch,slurm,mpi}` | 可选的启动器 | + +### 多卡训练 + +我们提供了一个脚本来使用 `torch.distributed.launch` 启动多卡训练。 + +```shell +bash ./tools/dist_train.sh ${CONFIG_FILE} ${GPU_NUM} [PY_ARGS] +``` + +| ARGS | Description | +| ------------- | -------------------------------------------------- | +| `CONFIG_FILE` | 配置文件路径 | +| `GPU_NUM` | 使用 GPU 数量 | +| `[PYARGS]` | 其他配置项 `tools/train.py`, 见 [这里](#本地训练). | + +你也可以通过环境变量来指定启动器的额外参数。例如,通过以下命令将启动器的通信端口改为 29666: + +```shell +PORT=29666 bash ./tools/dist_train.sh ${CONFIG_FILE} ${GPU_NUM} [PY_ARGS] +``` + +如果你想同时启动多个训练任务并使用不同的 GPU,你可以通过指定不同的端口和可见设备来启动它们。 + +```shell +CUDA_VISIBLE_DEVICES=0,1,2,3 PORT=29500 bash ./tools/dist_train.sh ${CONFIG_FILE1} 4 [PY_ARGS] +CUDA_VISIBLE_DEVICES=4,5,6,7 GPUS=29501 bash ./tools/dist_train.sh ${CONFIG_FILE2} 4 [PY_ARGS] +``` + +### 分布式训练 + +#### 局域网多机训练 + +如果你使用以太网连接的多台机器启动训练任务,你可以运行以下命令: + +在第一台机器上: + +```shell +NNODES=2 NODE_RANK=1 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_train.sh $CONFIG $GPUS +``` + +相比于单机多卡,你需要指定一些额外的环境变量: + +| 环境变量 | 描述 | +| ------------- | -------------------------- | +| `NNODES` | 机器总数 | +| `NODE_RANK` | 当前机器序号 | +| `PORT` | 通信端口,所有机器必须相同 | +| `MASTER_ADDR` | 主机地址,所有机器必须相同 | + +通常情况下,如果你没有像 InfiniBand 这样的高速网络,那么训练速度会很慢。 + +#### Slurm 多机训练 + +如果你在一个使用 [slurm](https://slurm.schedmd.com/) 管理的集群上运行 MMPose,你可以使用 `slurm_train.sh` 脚本。 + +```shell +[ENV_VARS] ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${WORK_DIR} [PY_ARGS] +``` + +脚本参数说明: + +| 参数 | 描述 | +| ------------- | -------------------------------------------------- | +| `PARTITION` | 指定集群分区 | +| `JOB_NAME` | 任务名,可以任取 | +| `CONFIG_FILE` | 配置文件路径 | +| `WORK_DIR` | 训练日志存储路径 | +| `[PYARGS]` | 其他配置项 `tools/train.py`, 见 [这里](#本地训练). | + +以下是可以用来配置 slurm 任务的环境变量: + +| 环境变量 | 描述 | +| --------------- | ------------------------------------------------------------------------ | +| `GPUS` | GPU 总数,默认为 8 | +| `GPUS_PER_NODE` | 每台机器使用的 GPU 总数,默认为 8 | +| `CPUS_PER_TASK` | 每个任务分配的 CPU 总数(通常为 1 张 GPU 对应 1 个任务进程),默认为 5 | +| `SRUN_ARGS` | `srun` 的其他参数,可选项见 [这里](https://slurm.schedmd.com/srun.html). | + +## 恢复训练 + +恢复训练意味着从之前的训练中保存的状态继续训练,其中状态包括模型权重、优化器状态和优化器参数调整策略的状态。 + +### 自动恢复 + +用户可以在训练命令的末尾添加 `--resume` 来恢复训练。程序会自动从 `work_dirs` 中加载最新的权重文件来恢复训练。如果 `work_dirs` 中有最新的 `checkpoint`(例如在之前的训练中中断了训练),则会从 `checkpoint` 处恢复训练。否则(例如之前的训练没有及时保存 `checkpoint` 或者启动了一个新的训练任务),则会重新开始训练。 + +以下是一个恢复训练的例子: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py --resume +``` + +### 指定 checkpoint 恢复 + +你可以在 `load_from` 中指定 `checkpoint` 的路径,MMPose 会自动读取 `checkpoint` 并从中恢复训练。命令如下: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py \ + --resume work_dirs/td-hm_res50_8xb64-210e_coco-256x192/latest.pth +``` + +如果你希望在配置文件中手动指定 `checkpoint` 路径,除了设置 `resume=True`,还需要设置 `load_from`。 + +需要注意的是,如果只设置了 `load_from` 而没有设置 `resume=True`,那么只会加载 `checkpoint` 中的权重,而不会从之前的状态继续训练。 + +以下的例子与上面指定 `--resume` 参数的例子等价: + +```Python +resume = True +load_from = 'work_dirs/td-hm_res50_8xb64-210e_coco-256x192/latest.pth' +# model settings +model = dict( + ## omitted ## + ) +``` + +## 在训练中冻结部分参数 + +在某些场景下,我们可能希望在训练过程中冻结模型的某些参数,以便微调特定部分或防止过拟合。在 MMPose 中,你可以通过在 `paramwise_cfg` 中设置 `custom_keys` 来为模型中的任何模块设置不同的超参数。这样可以让你控制模型特定部分的学习率和衰减系数。 + +例如,如果你想冻结 `backbone.layer0` 和 `backbone.layer1` 的所有参数,你可以在配置文件中添加以下内容: + +```Python +optim_wrapper = dict( + optimizer=dict(...), + paramwise_cfg=dict( + custom_keys={ + 'backbone.layer0': dict(lr_mult=0, decay_mult=0), + 'backbone.layer0': dict(lr_mult=0, decay_mult=0), + })) +``` + +以上配置将会通过将学习率和衰减系数设置为 0 来冻结 `backbone.layer0` 和 `backbone.layer1` 中的参数。通过这种方式,你可以有效地控制训练过程,并根据需要微调模型的特定部分。 + +## 自动混合精度训练(AMP) + +混合精度训练可以减少训练时间和存储需求,而不改变模型或降低模型训练精度,从而支持更大的 batch size、更大的模型和更大的输入尺寸。 + +要启用自动混合精度(AMP)训练,请在训练命令的末尾添加 `--amp`,如下所示: + +```shell +python tools/train.py ${CONFIG_FILE} --amp +``` + +具体例子如下: + +```shell +python tools/train.py configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_res50_8xb64-210e_coco-256x192.py --amp +``` + +## 设置随机种子 + +如果你想指定随机种子,你可以通过如下命令: + +```shell +python ./tools/train.py \ + ${CONFIG} \ # 配置文件 + --cfg-options randomness.seed=2023 \ # 设置 random seed = 2023 + [randomness.diff_rank_seed=True] \ # 不同 rank 的进程使用不同的随机种子 + [randomness.deterministic=True] # 设置 cudnn.deterministic=True +# `[]` 表示可选的参数,你不需要输入 `[]` +``` + +`randomness` 还有三个参数可以设置,具体含义如下。 + +- `randomness.seed=2023`,将随机种子设置为 `2023`。 + +- `randomness.diff_rank_seed=True`,根据全局 `rank` 设置不同的随机种子。默认为 `False`。 + +- `randomness.deterministic=True`,设置 `cuDNN` 后端的确定性选项,即将 `torch.backends.cudnn.deterministic` 设置为 `True`,将 `torch.backends.cudnn.benchmark` 设置为 `False`。默认为 `False`。更多细节请参考 [Pytorch Randomness](https://pytorch.org/docs/stable/notes/randomness.html)。 + +## 训练日志说明 + +在训练中,命令行会实时打印训练日志如下: + +```shell +07/14 08:26:50 - mmengine - INFO - Epoch(train) [38][ 6/38] base_lr: 5.148343e-04 lr: 5.148343e-04 eta: 0:15:34 time: 0.540754 data_time: 0.394292 memory: 3141 loss: 0.006220 loss_kpt: 0.006220 acc_pose: 1.000000 +``` + +以上训练日志包括如下内容: + +- `07/14 08:26:50`:当前时间 +- `mmengine`:日志前缀,表示日志来自 MMEngine +- `INFO` or `WARNING`:日志级别,表示该日志为普通信息 +- `Epoch(train)`:当前处于训练阶段,如果处于验证阶段,则为 `Epoch(val)` +- `[38][ 6/38]`:当前处于第 38 个 epoch,当前 batch 为第 6 个 batch,总共有 38 个 batch +- `base_lr`:基础学习率 +- `lr`:当前实际使用的学习率 +- `eta`:预计训练剩余时间 +- `time`:当前 batch 的训练时间(单位:分钟) +- `data_time`:当前 batch 的数据加载(i/o,数据增强)时间(单位:分钟) +- `memory`:当前进程占用的显存(单位:MB) +- `loss`:当前 batch 的总 loss +- `loss_kpt`:当前 batch 的关键点 loss +- `acc_pose`:当前 batch 的姿态准确率 + +## 可视化训练进程 + +监视训练过程对于了解模型的性能并进行必要的调整至关重要。在本节中,我们将介绍两种可视化训练过程的方法:TensorBoard 和 MMEngine Visualizer。 + +### TensorBoard + +TensorBoard 是一个强大的工具,可以让你可视化训练过程中的 loss 变化。要启用 TensorBoard 可视化,你可能需要: + +1. 安装 TensorBoard + + ```shell + pip install tensorboard + ``` + +2. 在配置文件中开启 TensorBoard 作为可视化后端: + + ```python + visualizer = dict(vis_backends=[ + dict(type='LocalVisBackend'), + dict(type='TensorboardVisBackend'), + ]) + ``` + +Tensorboard 生成的 event 文件会保存在实验日志文件夹 `${WORK_DIR}` 下,该文件夹默认为 `work_dir/${CONFIG}`,你也可以通过 `--work-dir` 参数指定。要可视化训练过程,请使用以下命令: + +```shell +tensorboard --logdir ${WORK_DIR}/${TIMESTAMP}/vis_data +``` + +### MMEngine Visualizer + +MMPose 还支持在验证过程中可视化模型的推理结果。要启用此功能,请在启动训练时使用 `--show` 选项或设置 `--show-dir`。这个功能提供了一种有效的方法来分析模型在特定示例上的性能并进行必要的调整。 + +## 测试 + +### 本地测试 + +你可以使用 `tools/test.py` 在单机上使用 CPU 或单个 GPU 测试模型。 + +```shell +python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [ARGS] +``` + +```{note} +默认情况下,MMPose 会优先使用 GPU 而不是 CPU。如果你想在 CPU 上测试模型,请清空 `CUDA_VISIBLE_DEVICES` 或将其设置为 -1,使 GPU 对程序不可见。 +``` + +```shell +CUDA_VISIBLE_DEVICES=-1 python tools/test.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [ARGS] +``` + +| ARGS | Description | +| ------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | 配置文件路径file. | +| `CHECKPOINT_FILE` | checkpoint 文件路径,可以是本地文件,也可以是网络链接。 [这里](https://MMPose.readthedocs.io/en/latest/model_zoo.html) 是 MMPose 提供的 checkpoint 列表. | +| `--work-dir WORK_DIR` | 评测结果存储目录 | +| `--out OUT` | 评测结果存放文件 | +| `--dump DUMP` | 导出评测时的模型输出,用于用户自行离线评测 | +| `--cfg-options CFG_OPTIONS` | 对当前配置文件中的一些设置进行临时覆盖,字典 key-value 格式为 xxx=yyy。如果需要覆盖的值是一个数组,格式应当为 `key="[a,b]"` 或 `key=a,b`。也允许使用元组,如 `key="[(a,b),(c,d)]"`。注意双引号是**必须的**,且**不允许**使用空格。 | +| `--show-dir SHOW_DIR` | T验证阶段生成的可视化图片存放路径 | +| `--show` | 使用窗口显示预测的可视化结果 | +| `--interval INTERVAL` | 进行可视化的间隔(每隔多少张图可视化一张) | +| `--wait-time WAIT_TIME` | 可视化显示时每张图片的持续时间(单位:秒),默认为 1 | +| `--launcher {none,pytorch,slurm,mpi}` | 可选的启动器 | + +### 多卡测试 + +我们提供了一个脚本来使用 `torch.distributed.launch` 启动多卡测试。 + +```shell +bash ./tools/dist_test.sh ${CONFIG_FILE} ${CHECKPOINT_FILE} ${GPU_NUM} [PY_ARGS] +``` + +| ARGS | Description | +| ----------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `CONFIG_FILE` | 配置文件路径 | +| `CHECKPOINT_FILE` | checkpoint 文件路径,可以是本地文件,也可以是网络链接。 [这里](https://MMPose.readthedocs.io/en/latest/model_zoo.html) 是 MMPose 提供的 checkpoint 列表 | +| `GPU_NUM` | 使用 GPU 数量 | +| `[PYARGS]` | 其他配置项 `tools/test.py`, 见 [这里](#本地测试) | + +你也可以通过环境变量来指定启动器的额外参数。例如,通过以下命令将启动器的通信端口改为 29666: + +```shell +PORT=29666 bash ./tools/dist_test.sh ${CONFIG_FILE} ${CHECKPOINT_FILE} ${GPU_NUM} [PY_ARGS] +``` + +如果你想同时启动多个测试任务并使用不同的 GPU,你可以通过指定不同的端口和可见设备来启动它们。 + +```shell +CUDA_VISIBLE_DEVICES=0,1,2,3 PORT=29500 bash ./tools/dist_test.sh ${CONFIG_FILE1} ${CHECKPOINT_FILE} 4 [PY_ARGS] +CUDA_VISIBLE_DEVICES=4,5,6,7 PORT=29501 bash ./tools/dist_test.sh ${CONFIG_FILE2} ${CHECKPOINT_FILE} 4 [PY_ARGS] +``` + +### 分布式测试 + +#### 局域网多机测试 + +如果你使用以太网连接的多台机器启动测试任务,你可以运行以下命令: + +在第一台机器上: + +```shell +NNODES=2 NODE_RANK=0 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_test.sh $CONFIG $CHECKPOINT_FILE $GPUS +``` + +在第二台机器上: + +```shell +NNODES=2 NODE_RANK=1 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR bash tools/dist_test.sh $CONFIG $CHECKPOINT_FILE $GPUS +``` + +相比于单机多卡,你需要指定一些额外的环境变量: + +| 环境变量 | 描述 | +| ------------- | -------------------------- | +| `NNODES` | 机器总数 | +| `NODE_RANK` | 当前机器序号 | +| `PORT` | 通信端口,所有机器必须相同 | +| `MASTER_ADDR` | 主机地址,所有机器必须相同 | + +通常情况下,如果你没有像 InfiniBand 这样的高速网络,那么测试速度会很慢。 + +#### Slurm 多机测试 + +如果你在一个使用 [slurm](https://slurm.schedmd.com/) 管理的集群上运行 MMPose,你可以使用 `slurm_test.sh` 脚本。 + +```shell +[ENV_VARS] ./tools/slurm_test.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${CHECKPOINT_FILE} [PY_ARGS] +``` + +脚本参数说明: + +| 参数 | 描述 | +| ----------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------- | +| `PARTITION` | 指定集群分区 | +| `JOB_NAME` | 任务名,可以任取 | +| `CONFIG_FILE` | 配置文件路径 | +| `CHECKPOINT_FILE` | checkpoint 文件路径,可以是本地文件,也可以是网络链接。 [这里](https://MMPose.readthedocs.io/en/latest/model_zoo.html) 是 MMPose 提供的 checkpoint 列表 | +| `[PYARGS]` | 其他配置项 `tools/test.py`, 见 [这里](#本地测试) | + +以下是可以用来配置 slurm 任务的环境变量: + +| 环境变量 | 描述 | +| --------------- | ------------------------------------------------------------------------ | +| `GPUS` | GPU 总数,默认为 8 | +| `GPUS_PER_NODE` | 每台机器使用的 GPU 总数,默认为 8 | +| `CPUS_PER_TASK` | 每个任务分配的 CPU 总数(通常为 1 张 GPU 对应 1 个任务进程),默认为 5 | +| `SRUN_ARGS` | `srun` 的其他参数,可选项见 [这里](https://slurm.schedmd.com/srun.html). | + +## 自定义测试 + +### 用自定义度量进行测试 + +如果您希望使用 MMPose 中尚未支持的独特度量来评估模型,您将需要自己编写这些度量并将它们包含在您的配置文件中。关于如何实现这一点的指导,请查看我们的 [自定义评估指南](https://mmpose.readthedocs.io/zh_CN/dev-1.x/advanced_guides/customize_evaluation.html)。 + +### 在多个数据集上进行评估 + +MMPose 提供了一个名为 `MultiDatasetEvaluator` 的便捷工具,用于在多个数据集上进行简化评估。在配置文件中设置此评估器非常简单。下面是一个快速示例,演示如何使用 COCO 和 AIC 数据集评估模型: + +```python +# 设置验证数据集 +coco_val = dict(type='CocoDataset', ...) + +aic_val = dict(type='AicDataset', ...) + +val_dataset = dict( + type='CombinedDataset', + datasets=[coco_val, aic_val], + pipeline=val_pipeline, + ...) + +# 配置评估器 +val_evaluator = dict( + type='MultiDatasetEvaluator', + metrics=[ # 为每个数据集配置度量 + dict(type='CocoMetric', + ann_file='data/coco/annotations/person_keypoints_val2017.json'), + dict(type='CocoMetric', + ann_file='data/aic/annotations/aic_val.json', + use_area=False, + prefix='aic') + ], + # 数据集个数和顺序与度量必须匹配 + datasets=[coco_val, aic_val], + ) +``` + +同的数据集(如 COCO 和 AIC)具有不同的关键点定义。然而,模型的输出关键点是标准化的。这导致了模型输出与真值之间关键点顺序的差异。为解决这一问题,您可以使用 `KeypointConverter` 来对齐不同数据集之间的关键点顺序。下面是一个完整示例,展示了如何利用 `KeypointConverter` 来对齐 AIC 关键点与 COCO 关键点: + +```python +aic_to_coco_converter = dict( + type='KeypointConverter', + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + +# val datasets +coco_val = dict( + type='CocoDataset', + data_root='data/coco/', + data_mode='topdown', + ann_file='annotations/person_keypoints_val2017.json', + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=[], +) + +aic_val = dict( + type='AicDataset', + data_root='data/aic/', + data_mode=data_mode, + ann_file='annotations/aic_val.json', + data_prefix=dict(img='ai_challenger_keypoint_validation_20170911/' + 'keypoint_validation_images_20170911/'), + test_mode=True, + pipeline=[], + ) + +val_dataset = dict( + type='CombinedDataset', + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[coco_val, aic_val], + pipeline=val_pipeline, + test_mode=True, + ) + +val_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False, round_up=False), + dataset=val_dataset) + +test_dataloader = val_dataloader + +val_evaluator = dict( + type='MultiDatasetEvaluator', + metrics=[ + dict(type='CocoMetric', + ann_file=data_root + 'annotations/person_keypoints_val2017.json'), + dict(type='CocoMetric', + ann_file='data/aic/annotations/aic_val.json', + use_area=False, + gt_converter=aic_to_coco_converter, + prefix='aic') + ], + datasets=val_dataset['datasets'], + ) + +test_evaluator = val_evaluator +``` + +如需进一步了解如何将 AIC 关键点转换为 COCO 关键点,请查阅 [该指南](https://mmpose.readthedocs.io/zh_CN/dev-1.x/user_guides/mixed_datasets.html#aic-coco)。 + +### 使用自定义检测器评估 Top-down 模型 + +要评估 Top-down 模型,您可以使用人工标注的或预先检测到的边界框。 `bbox_file` 提供了由特定检测器生成的这些框。例如,`COCO_val2017_detections_AP_H_56_person.json` 包含了使用具有 56.4 人类 AP 的检测器捕获的 COCO val2017 数据集的边界框。要使用 MMDetection 支持的自定义检测器创建您自己的 `bbox_file`,请运行以下命令: + +```sh +python tools/misc/generate_bbox_file.py \ + ${DET_CONFIG} ${DET_WEIGHT} ${OUTPUT_FILE_NAME} \ + [--pose-config ${POSE_CONFIG}] \ + [--score-thr ${SCORE_THRESHOLD}] [--nms-thr ${NMS_THRESHOLD}] +``` + +其中,`DET_CONFIG` 和 `DET_WEIGHT` 用于创建目标检测器。 `POSE_CONFIG` 指定需要边界框检测的测试数据集。`SCORE_THRESHOLD` 和 `NMS_THRESHOLD` 用于边界框过滤。 diff --git a/mmpose/__init__.py b/mmpose/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..dda49513faf22bf632da4f03ce57f175c3d7f853 --- /dev/null +++ b/mmpose/__init__.py @@ -0,0 +1,27 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import mmcv +import mmengine +from mmengine.utils import digit_version + +from .version import __version__, short_version + +mmcv_minimum_version = '2.0.0rc4' +mmcv_maximum_version = '2.3.0' +mmcv_version = digit_version(mmcv.__version__) + +mmengine_minimum_version = '0.6.0' +mmengine_maximum_version = '1.0.0' +mmengine_version = digit_version(mmengine.__version__) + +assert (mmcv_version >= digit_version(mmcv_minimum_version) + and mmcv_version <= digit_version(mmcv_maximum_version)), \ + f'MMCV=={mmcv.__version__} is used but incompatible. ' \ + f'Please install mmcv>={mmcv_minimum_version}, <={mmcv_maximum_version}.' + +assert (mmengine_version >= digit_version(mmengine_minimum_version) + and mmengine_version <= digit_version(mmengine_maximum_version)), \ + f'MMEngine=={mmengine.__version__} is used but incompatible. ' \ + f'Please install mmengine>={mmengine_minimum_version}, ' \ + f'<={mmengine_maximum_version}.' + +__all__ = ['__version__', 'short_version'] diff --git a/mmpose/apis/__init__.py b/mmpose/apis/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..322ee9cf73d9fe7c796d5f47093f4c0a94b623fd --- /dev/null +++ b/mmpose/apis/__init__.py @@ -0,0 +1,16 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .inference import (collect_multi_frames, inference_bottomup, + inference_topdown, init_model) +from .inference_3d import (collate_pose_sequence, convert_keypoint_definition, + extract_pose_sequence, inference_pose_lifter_model) +from .inference_tracking import _compute_iou, _track_by_iou, _track_by_oks +from .inferencers import MMPoseInferencer, Pose2DInferencer +from .visualization import visualize + +__all__ = [ + 'init_model', 'inference_topdown', 'inference_bottomup', + 'collect_multi_frames', 'Pose2DInferencer', 'MMPoseInferencer', + '_track_by_iou', '_track_by_oks', '_compute_iou', + 'inference_pose_lifter_model', 'extract_pose_sequence', + 'convert_keypoint_definition', 'collate_pose_sequence', 'visualize' +] diff --git a/mmpose/apis/inference.py b/mmpose/apis/inference.py new file mode 100644 index 0000000000000000000000000000000000000000..5662d6f30bd83e43c9a282fa71c8d416c79827b0 --- /dev/null +++ b/mmpose/apis/inference.py @@ -0,0 +1,263 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import warnings +from pathlib import Path +from typing import List, Optional, Union + +import numpy as np +import torch +import torch.nn as nn +from mmengine.config import Config +from mmengine.dataset import Compose, pseudo_collate +from mmengine.model.utils import revert_sync_batchnorm +from mmengine.registry import init_default_scope +from mmengine.runner import load_checkpoint +from PIL import Image + +from mmpose.datasets.datasets.utils import parse_pose_metainfo +from mmpose.models.builder import build_pose_estimator +from mmpose.structures import PoseDataSample +from mmpose.structures.bbox import bbox_xywh2xyxy + + +def dataset_meta_from_config(config: Config, + dataset_mode: str = 'train') -> Optional[dict]: + """Get dataset metainfo from the model config. + + Args: + config (str, :obj:`Path`, or :obj:`mmengine.Config`): Config file path, + :obj:`Path`, or the config object. + dataset_mode (str): Specify the dataset of which to get the metainfo. + Options are ``'train'``, ``'val'`` and ``'test'``. Defaults to + ``'train'`` + + Returns: + dict, optional: The dataset metainfo. See + ``mmpose.datasets.datasets.utils.parse_pose_metainfo`` for details. + Return ``None`` if failing to get dataset metainfo from the config. + """ + try: + if dataset_mode == 'train': + dataset_cfg = config.train_dataloader.dataset + elif dataset_mode == 'val': + dataset_cfg = config.val_dataloader.dataset + elif dataset_mode == 'test': + dataset_cfg = config.test_dataloader.dataset + else: + raise ValueError( + f'Invalid dataset {dataset_mode} to get metainfo. ' + 'Should be one of "train", "val", or "test".') + + if 'metainfo' in dataset_cfg: + metainfo = dataset_cfg.metainfo + else: + import mmpose.datasets.datasets # noqa: F401, F403 + from mmpose.registry import DATASETS + + dataset_class = dataset_cfg.type if isinstance( + dataset_cfg.type, type) else DATASETS.get(dataset_cfg.type) + metainfo = dataset_class.METAINFO + + metainfo = parse_pose_metainfo(metainfo) + + except AttributeError: + metainfo = None + + return metainfo + + +def init_model(config: Union[str, Path, Config], + checkpoint: Optional[str] = None, + device: str = 'cuda:0', + cfg_options: Optional[dict] = None) -> nn.Module: + """Initialize a pose estimator from a config file. + + Args: + config (str, :obj:`Path`, or :obj:`mmengine.Config`): Config file path, + :obj:`Path`, or the config object. + checkpoint (str, optional): Checkpoint path. If left as None, the model + will not load any weights. Defaults to ``None`` + device (str): The device where the anchors will be put on. + Defaults to ``'cuda:0'``. + cfg_options (dict, optional): Options to override some settings in + the used config. Defaults to ``None`` + + Returns: + nn.Module: The constructed pose estimator. + """ + + if isinstance(config, (str, Path)): + config = Config.fromfile(config) + elif not isinstance(config, Config): + raise TypeError('config must be a filename or Config object, ' + f'but got {type(config)}') + if cfg_options is not None: + config.merge_from_dict(cfg_options) + elif 'init_cfg' in config.model.backbone: + config.model.backbone.init_cfg = None + config.model.train_cfg = None + + # register all modules in mmpose into the registries + scope = config.get('default_scope', 'mmpose') + if scope is not None: + init_default_scope(scope) + + model = build_pose_estimator(config.model) + model = revert_sync_batchnorm(model) + # get dataset_meta in this priority: checkpoint > config > default (COCO) + dataset_meta = None + + if checkpoint is not None: + ckpt = load_checkpoint(model, checkpoint, map_location='cpu') + + if 'dataset_meta' in ckpt.get('meta', {}): + # checkpoint from mmpose 1.x + dataset_meta = ckpt['meta']['dataset_meta'] + + if dataset_meta is None: + dataset_meta = dataset_meta_from_config(config, dataset_mode='train') + + if dataset_meta is None: + warnings.simplefilter('once') + warnings.warn('Can not load dataset_meta from the checkpoint or the ' + 'model config. Use COCO metainfo by default.') + dataset_meta = parse_pose_metainfo( + dict(from_file='configs/_base_/datasets/coco.py')) + + model.dataset_meta = dataset_meta + + model.cfg = config # save the config in the model for convenience + model.to(device) + model.eval() + return model + + +def inference_topdown(model: nn.Module, + img: Union[np.ndarray, str], + bboxes: Optional[Union[List, np.ndarray]] = None, + bbox_format: str = 'xyxy') -> List[PoseDataSample]: + """Inference image with a top-down pose estimator. + + Args: + model (nn.Module): The top-down pose estimator + img (np.ndarray | str): The loaded image or image file to inference + bboxes (np.ndarray, optional): The bboxes in shape (N, 4), each row + represents a bbox. If not given, the entire image will be regarded + as a single bbox area. Defaults to ``None`` + bbox_format (str): The bbox format indicator. Options are ``'xywh'`` + and ``'xyxy'``. Defaults to ``'xyxy'`` + + Returns: + List[:obj:`PoseDataSample`]: The inference results. Specifically, the + predicted keypoints and scores are saved at + ``data_sample.pred_instances.keypoints`` and + ``data_sample.pred_instances.keypoint_scores``. + """ + scope = model.cfg.get('default_scope', 'mmpose') + if scope is not None: + init_default_scope(scope) + pipeline = Compose(model.cfg.test_dataloader.dataset.pipeline) + + if bboxes is None or len(bboxes) == 0: + # get bbox from the image size + if isinstance(img, str): + w, h = Image.open(img).size + else: + h, w = img.shape[:2] + + bboxes = np.array([[0, 0, w, h]], dtype=np.float32) + else: + if isinstance(bboxes, list): + bboxes = np.array(bboxes) + + assert bbox_format in {'xyxy', 'xywh'}, \ + f'Invalid bbox_format "{bbox_format}".' + + if bbox_format == 'xywh': + bboxes = bbox_xywh2xyxy(bboxes) + + # construct batch data samples + data_list = [] + for bbox in bboxes: + if isinstance(img, str): + data_info = dict(img_path=img) + else: + data_info = dict(img=img) + data_info['bbox'] = bbox[None] # shape (1, 4) + data_info['bbox_score'] = np.ones(1, dtype=np.float32) # shape (1,) + data_info.update(model.dataset_meta) + data_list.append(pipeline(data_info)) + + if data_list: + # collate data list into a batch, which is a dict with following keys: + # batch['inputs']: a list of input images + # batch['data_samples']: a list of :obj:`PoseDataSample` + batch = pseudo_collate(data_list) + with torch.no_grad(): + results = model.test_step(batch) + else: + results = [] + + return results + + +def inference_bottomup(model: nn.Module, img: Union[np.ndarray, str]): + """Inference image with a bottom-up pose estimator. + + Args: + model (nn.Module): The bottom-up pose estimator + img (np.ndarray | str): The loaded image or image file to inference + + Returns: + List[:obj:`PoseDataSample`]: The inference results. Specifically, the + predicted keypoints and scores are saved at + ``data_sample.pred_instances.keypoints`` and + ``data_sample.pred_instances.keypoint_scores``. + """ + pipeline = Compose(model.cfg.test_dataloader.dataset.pipeline) + + # prepare data batch + if isinstance(img, str): + data_info = dict(img_path=img) + else: + data_info = dict(img=img) + data_info.update(model.dataset_meta) + data = pipeline(data_info) + batch = pseudo_collate([data]) + + with torch.no_grad(): + results = model.test_step(batch) + + return results + + +def collect_multi_frames(video, frame_id, indices, online=False): + """Collect multi frames from the video. + + Args: + video (mmcv.VideoReader): A VideoReader of the input video file. + frame_id (int): index of the current frame + indices (list(int)): index offsets of the frames to collect + online (bool): inference mode, if set to True, can not use future + frame information. + + Returns: + list(ndarray): multi frames collected from the input video file. + """ + num_frames = len(video) + frames = [] + # put the current frame at first + frames.append(video[frame_id]) + # use multi frames for inference + for idx in indices: + # skip current frame + if idx == 0: + continue + support_idx = frame_id + idx + # online mode, can not use future frame information + if online: + support_idx = np.clip(support_idx, 0, frame_id) + else: + support_idx = np.clip(support_idx, 0, num_frames - 1) + frames.append(video[support_idx]) + + return frames diff --git a/mmpose/apis/inference_3d.py b/mmpose/apis/inference_3d.py new file mode 100644 index 0000000000000000000000000000000000000000..b4151e804a593da7cb5355ece804924ccbd7f0b0 --- /dev/null +++ b/mmpose/apis/inference_3d.py @@ -0,0 +1,360 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import numpy as np +import torch +from mmengine.dataset import Compose, pseudo_collate +from mmengine.registry import init_default_scope +from mmengine.structures import InstanceData + +from mmpose.structures import PoseDataSample + + +def convert_keypoint_definition(keypoints, pose_det_dataset, + pose_lift_dataset): + """Convert pose det dataset keypoints definition to pose lifter dataset + keypoints definition, so that they are compatible with the definitions + required for 3D pose lifting. + + Args: + keypoints (ndarray[N, K, 2 or 3]): 2D keypoints to be transformed. + pose_det_dataset, (str): Name of the dataset for 2D pose detector. + pose_lift_dataset (str): Name of the dataset for pose lifter model. + + Returns: + ndarray[K, 2 or 3]: the transformed 2D keypoints. + """ + assert pose_lift_dataset in [ + 'h36m', 'h3wb'], '`pose_lift_dataset` should be ' \ + f'`h36m`, but got {pose_lift_dataset}.' + + keypoints_new = np.zeros((keypoints.shape[0], 17, keypoints.shape[2]), + dtype=keypoints.dtype) + if pose_lift_dataset in ['h36m', 'h3wb']: + if pose_det_dataset in ['h36m', 'coco_wholebody']: + keypoints_new = keypoints + elif pose_det_dataset in ['coco', 'posetrack18']: + # pelvis (root) is in the middle of l_hip and r_hip + keypoints_new[:, 0] = (keypoints[:, 11] + keypoints[:, 12]) / 2 + # thorax is in the middle of l_shoulder and r_shoulder + keypoints_new[:, 8] = (keypoints[:, 5] + keypoints[:, 6]) / 2 + # spine is in the middle of thorax and pelvis + keypoints_new[:, + 7] = (keypoints_new[:, 0] + keypoints_new[:, 8]) / 2 + # in COCO, head is in the middle of l_eye and r_eye + # in PoseTrack18, head is in the middle of head_bottom and head_top + keypoints_new[:, 10] = (keypoints[:, 1] + keypoints[:, 2]) / 2 + # rearrange other keypoints + keypoints_new[:, [1, 2, 3, 4, 5, 6, 9, 11, 12, 13, 14, 15, 16]] = \ + keypoints[:, [12, 14, 16, 11, 13, 15, 0, 5, 7, 9, 6, 8, 10]] + elif pose_det_dataset in ['aic']: + # pelvis (root) is in the middle of l_hip and r_hip + keypoints_new[:, 0] = (keypoints[:, 9] + keypoints[:, 6]) / 2 + # thorax is in the middle of l_shoulder and r_shoulder + keypoints_new[:, 8] = (keypoints[:, 3] + keypoints[:, 0]) / 2 + # spine is in the middle of thorax and pelvis + keypoints_new[:, + 7] = (keypoints_new[:, 0] + keypoints_new[:, 8]) / 2 + # neck base (top end of neck) is 1/4 the way from + # neck (bottom end of neck) to head top + keypoints_new[:, 9] = (3 * keypoints[:, 13] + keypoints[:, 12]) / 4 + # head (spherical centre of head) is 7/12 the way from + # neck (bottom end of neck) to head top + keypoints_new[:, 10] = (5 * keypoints[:, 13] + + 7 * keypoints[:, 12]) / 12 + + keypoints_new[:, [1, 2, 3, 4, 5, 6, 11, 12, 13, 14, 15, 16]] = \ + keypoints[:, [6, 7, 8, 9, 10, 11, 3, 4, 5, 0, 1, 2]] + elif pose_det_dataset in ['crowdpose']: + # pelvis (root) is in the middle of l_hip and r_hip + keypoints_new[:, 0] = (keypoints[:, 6] + keypoints[:, 7]) / 2 + # thorax is in the middle of l_shoulder and r_shoulder + keypoints_new[:, 8] = (keypoints[:, 0] + keypoints[:, 1]) / 2 + # spine is in the middle of thorax and pelvis + keypoints_new[:, + 7] = (keypoints_new[:, 0] + keypoints_new[:, 8]) / 2 + # neck base (top end of neck) is 1/4 the way from + # neck (bottom end of neck) to head top + keypoints_new[:, 9] = (3 * keypoints[:, 13] + keypoints[:, 12]) / 4 + # head (spherical centre of head) is 7/12 the way from + # neck (bottom end of neck) to head top + keypoints_new[:, 10] = (5 * keypoints[:, 13] + + 7 * keypoints[:, 12]) / 12 + + keypoints_new[:, [1, 2, 3, 4, 5, 6, 11, 12, 13, 14, 15, 16]] = \ + keypoints[:, [7, 9, 11, 6, 8, 10, 0, 2, 4, 1, 3, 5]] + else: + raise NotImplementedError( + f'unsupported conversion between {pose_lift_dataset} and ' + f'{pose_det_dataset}') + + return keypoints_new + + +def extract_pose_sequence(pose_results, frame_idx, causal, seq_len, step=1): + """Extract the target frame from 2D pose results, and pad the sequence to a + fixed length. + + Args: + pose_results (List[List[:obj:`PoseDataSample`]]): Multi-frame pose + detection results stored in a list. + frame_idx (int): The index of the frame in the original video. + causal (bool): If True, the target frame is the last frame in + a sequence. Otherwise, the target frame is in the middle of + a sequence. + seq_len (int): The number of frames in the input sequence. + step (int): Step size to extract frames from the video. + + Returns: + List[List[:obj:`PoseDataSample`]]: Multi-frame pose detection results + stored in a nested list with a length of seq_len. + """ + if causal: + frames_left = seq_len - 1 + frames_right = 0 + else: + frames_left = (seq_len - 1) // 2 + frames_right = frames_left + num_frames = len(pose_results) + + # get the padded sequence + pad_left = max(0, frames_left - frame_idx // step) + pad_right = max(0, frames_right - (num_frames - 1 - frame_idx) // step) + start = max(frame_idx % step, frame_idx - frames_left * step) + end = min(num_frames - (num_frames - 1 - frame_idx) % step, + frame_idx + frames_right * step + 1) + pose_results_seq = [pose_results[0]] * pad_left + \ + pose_results[start:end:step] + [pose_results[-1]] * pad_right + return pose_results_seq + + +def collate_pose_sequence(pose_results_2d, + with_track_id=True, + target_frame=-1): + """Reorganize multi-frame pose detection results into individual pose + sequences. + + Note: + - The temporal length of the pose detection results: T + - The number of the person instances: N + - The number of the keypoints: K + - The channel number of each keypoint: C + + Args: + pose_results_2d (List[List[:obj:`PoseDataSample`]]): Multi-frame pose + detection results stored in a nested list. Each element of the + outer list is the pose detection results of a single frame, and + each element of the inner list is the pose information of one + person, which contains: + + - keypoints (ndarray[K, 2 or 3]): x, y, [score] + - track_id (int): unique id of each person, required when + ``with_track_id==True``` + + with_track_id (bool): If True, the element in pose_results is expected + to contain "track_id", which will be used to gather the pose + sequence of a person from multiple frames. Otherwise, the pose + results in each frame are expected to have a consistent number and + order of identities. Default is True. + target_frame (int): The index of the target frame. Default: -1. + + Returns: + List[:obj:`PoseDataSample`]: Indivisual pose sequence in with length N. + """ + T = len(pose_results_2d) + assert T > 0 + + target_frame = (T + target_frame) % T # convert negative index to positive + + N = len( + pose_results_2d[target_frame]) # use identities in the target frame + if N == 0: + return [] + + B, K, C = pose_results_2d[target_frame][0].pred_instances.keypoints.shape + + track_ids = None + if with_track_id: + track_ids = [res.track_id for res in pose_results_2d[target_frame]] + + pose_sequences = [] + for idx in range(N): + pose_seq = PoseDataSample() + pred_instances = InstanceData() + + gt_instances = pose_results_2d[target_frame][idx].gt_instances.clone() + pred_instances = pose_results_2d[target_frame][ + idx].pred_instances.clone() + pose_seq.pred_instances = pred_instances + pose_seq.gt_instances = gt_instances + + if not with_track_id: + pose_seq.pred_instances.keypoints = np.stack([ + frame[idx].pred_instances.keypoints + for frame in pose_results_2d + ], + axis=1) + else: + keypoints = np.zeros((B, T, K, C), dtype=np.float32) + keypoints[:, target_frame] = pose_results_2d[target_frame][ + idx].pred_instances.keypoints + # find the left most frame containing track_ids[idx] + for frame_idx in range(target_frame - 1, -1, -1): + contains_idx = False + for res in pose_results_2d[frame_idx]: + if res.track_id == track_ids[idx]: + keypoints[:, frame_idx] = res.pred_instances.keypoints + contains_idx = True + break + if not contains_idx: + # replicate the left most frame + keypoints[:, :frame_idx + 1] = keypoints[:, frame_idx + 1] + break + # find the right most frame containing track_idx[idx] + for frame_idx in range(target_frame + 1, T): + contains_idx = False + for res in pose_results_2d[frame_idx]: + if res.track_id == track_ids[idx]: + keypoints[:, frame_idx] = res.pred_instances.keypoints + contains_idx = True + break + if not contains_idx: + # replicate the right most frame + keypoints[:, frame_idx + 1:] = keypoints[:, frame_idx] + break + pose_seq.pred_instances.set_field(keypoints, 'keypoints') + pose_sequences.append(pose_seq) + + return pose_sequences + + +def inference_pose_lifter_model(model, + pose_results_2d, + with_track_id=True, + image_size=None, + norm_pose_2d=False): + """Inference 3D pose from 2D pose sequences using a pose lifter model. + + Args: + model (nn.Module): The loaded pose lifter model + pose_results_2d (List[List[:obj:`PoseDataSample`]]): The 2D pose + sequences stored in a nested list. + with_track_id: If True, the element in pose_results_2d is expected to + contain "track_id", which will be used to gather the pose sequence + of a person from multiple frames. Otherwise, the pose results in + each frame are expected to have a consistent number and order of + identities. Default is True. + image_size (tuple|list): image width, image height. If None, image size + will not be contained in dict ``data``. + norm_pose_2d (bool): If True, scale the bbox (along with the 2D + pose) to the average bbox scale of the dataset, and move the bbox + (along with the 2D pose) to the average bbox center of the dataset. + + Returns: + List[:obj:`PoseDataSample`]: 3D pose inference results. Specifically, + the predicted keypoints and scores are saved at + ``data_sample.pred_instances.keypoints_3d``. + """ + init_default_scope(model.cfg.get('default_scope', 'mmpose')) + pipeline = Compose(model.cfg.test_dataloader.dataset.pipeline) + + causal = model.cfg.test_dataloader.dataset.get('causal', False) + target_idx = -1 if causal else len(pose_results_2d) // 2 + + dataset_info = model.dataset_meta + if dataset_info is not None: + if 'stats_info' in dataset_info: + bbox_center = dataset_info['stats_info']['bbox_center'] + bbox_scale = dataset_info['stats_info']['bbox_scale'] + else: + if norm_pose_2d: + # compute the average bbox center and scale from the + # datasamples in pose_results_2d + bbox_center = np.zeros((1, 2), dtype=np.float32) + bbox_scale = 0 + num_bbox = 0 + for pose_res in pose_results_2d: + for data_sample in pose_res: + for bbox in data_sample.pred_instances.bboxes: + bbox_center += np.array([[(bbox[0] + bbox[2]) / 2, + (bbox[1] + bbox[3]) / 2] + ]) + bbox_scale += max(bbox[2] - bbox[0], + bbox[3] - bbox[1]) + num_bbox += 1 + bbox_center /= num_bbox + bbox_scale /= num_bbox + else: + bbox_center = None + bbox_scale = None + + pose_results_2d_copy = [] + for i, pose_res in enumerate(pose_results_2d): + pose_res_copy = [] + for j, data_sample in enumerate(pose_res): + data_sample_copy = PoseDataSample() + data_sample_copy.gt_instances = data_sample.gt_instances.clone() + data_sample_copy.pred_instances = data_sample.pred_instances.clone( + ) + data_sample_copy.track_id = data_sample.track_id + kpts = data_sample.pred_instances.keypoints + bboxes = data_sample.pred_instances.bboxes + keypoints = [] + for k in range(len(kpts)): + kpt = kpts[k] + if norm_pose_2d: + bbox = bboxes[k] + center = np.array([[(bbox[0] + bbox[2]) / 2, + (bbox[1] + bbox[3]) / 2]]) + scale = max(bbox[2] - bbox[0], bbox[3] - bbox[1]) + keypoints.append((kpt[:, :2] - center) / scale * + bbox_scale + bbox_center) + else: + keypoints.append(kpt[:, :2]) + data_sample_copy.pred_instances.set_field( + np.array(keypoints), 'keypoints') + pose_res_copy.append(data_sample_copy) + pose_results_2d_copy.append(pose_res_copy) + + pose_sequences_2d = collate_pose_sequence(pose_results_2d_copy, + with_track_id, target_idx) + + if not pose_sequences_2d: + return [] + + data_list = [] + for i, pose_seq in enumerate(pose_sequences_2d): + data_info = dict() + + keypoints_2d = pose_seq.pred_instances.keypoints + keypoints_2d = np.squeeze( + keypoints_2d, axis=0) if keypoints_2d.ndim == 4 else keypoints_2d + + T, K, C = keypoints_2d.shape + + data_info['keypoints'] = keypoints_2d + data_info['keypoints_visible'] = np.ones(( + T, + K, + ), dtype=np.float32) + data_info['lifting_target'] = np.zeros((1, K, 3), dtype=np.float32) + data_info['factor'] = np.zeros((T, ), dtype=np.float32) + data_info['lifting_target_visible'] = np.ones((1, K, 1), + dtype=np.float32) + + if image_size is not None: + assert len(image_size) == 2 + data_info['camera_param'] = dict(w=image_size[0], h=image_size[1]) + + data_info.update(model.dataset_meta) + data_list.append(pipeline(data_info)) + + if data_list: + # collate data list into a batch, which is a dict with following keys: + # batch['inputs']: a list of input images + # batch['data_samples']: a list of :obj:`PoseDataSample` + batch = pseudo_collate(data_list) + with torch.no_grad(): + results = model.test_step(batch) + else: + results = [] + + return results diff --git a/mmpose/apis/inference_tracking.py b/mmpose/apis/inference_tracking.py new file mode 100644 index 0000000000000000000000000000000000000000..c823adcfc7107e1e63ba0a62ad48148d7fc354c9 --- /dev/null +++ b/mmpose/apis/inference_tracking.py @@ -0,0 +1,103 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import warnings + +import numpy as np + +from mmpose.evaluation.functional.nms import oks_iou + + +def _compute_iou(bboxA, bboxB): + """Compute the Intersection over Union (IoU) between two boxes . + + Args: + bboxA (list): The first bbox info (left, top, right, bottom, score). + bboxB (list): The second bbox info (left, top, right, bottom, score). + + Returns: + float: The IoU value. + """ + + x1 = max(bboxA[0], bboxB[0]) + y1 = max(bboxA[1], bboxB[1]) + x2 = min(bboxA[2], bboxB[2]) + y2 = min(bboxA[3], bboxB[3]) + + inter_area = max(0, x2 - x1) * max(0, y2 - y1) + + bboxA_area = (bboxA[2] - bboxA[0]) * (bboxA[3] - bboxA[1]) + bboxB_area = (bboxB[2] - bboxB[0]) * (bboxB[3] - bboxB[1]) + union_area = float(bboxA_area + bboxB_area - inter_area) + if union_area == 0: + union_area = 1e-5 + warnings.warn('union_area=0 is unexpected') + + iou = inter_area / union_area + + return iou + + +def _track_by_iou(res, results_last, thr): + """Get track id using IoU tracking greedily.""" + + bbox = list(np.squeeze(res.pred_instances.bboxes, axis=0)) + + max_iou_score = -1 + max_index = -1 + match_result = {} + for index, res_last in enumerate(results_last): + bbox_last = list(np.squeeze(res_last.pred_instances.bboxes, axis=0)) + + iou_score = _compute_iou(bbox, bbox_last) + if iou_score > max_iou_score: + max_iou_score = iou_score + max_index = index + + if max_iou_score > thr: + track_id = results_last[max_index].track_id + match_result = results_last[max_index] + del results_last[max_index] + else: + track_id = -1 + + return track_id, results_last, match_result + + +def _track_by_oks(res, results_last, thr, sigmas=None): + """Get track id using OKS tracking greedily.""" + keypoint = np.concatenate((res.pred_instances.keypoints, + res.pred_instances.keypoint_scores[:, :, None]), + axis=2) + keypoint = np.squeeze(keypoint, axis=0).reshape((-1)) + area = np.squeeze(res.pred_instances.areas, axis=0) + max_index = -1 + match_result = {} + + if len(results_last) == 0: + return -1, results_last, match_result + + keypoints_last = np.array([ + np.squeeze( + np.concatenate( + (res_last.pred_instances.keypoints, + res_last.pred_instances.keypoint_scores[:, :, None]), + axis=2), + axis=0).reshape((-1)) for res_last in results_last + ]) + area_last = np.array([ + np.squeeze(res_last.pred_instances.areas, axis=0) + for res_last in results_last + ]) + + oks_score = oks_iou( + keypoint, keypoints_last, area, area_last, sigmas=sigmas) + + max_index = np.argmax(oks_score) + + if oks_score[max_index] > thr: + track_id = results_last[max_index].track_id + match_result = results_last[max_index] + del results_last[max_index] + else: + track_id = -1 + + return track_id, results_last, match_result diff --git a/mmpose/apis/inferencers/__init__.py b/mmpose/apis/inferencers/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..0e2b5c8293f261ef5651f2d379e35c484ae53e40 --- /dev/null +++ b/mmpose/apis/inferencers/__init__.py @@ -0,0 +1,11 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .hand3d_inferencer import Hand3DInferencer +from .mmpose_inferencer import MMPoseInferencer +from .pose2d_inferencer import Pose2DInferencer +from .pose3d_inferencer import Pose3DInferencer +from .utils import get_model_aliases + +__all__ = [ + 'Pose2DInferencer', 'MMPoseInferencer', 'get_model_aliases', + 'Pose3DInferencer', 'Hand3DInferencer' +] diff --git a/mmpose/apis/inferencers/base_mmpose_inferencer.py b/mmpose/apis/inferencers/base_mmpose_inferencer.py new file mode 100644 index 0000000000000000000000000000000000000000..574063e824198bb535d3737df472300a78229c3f --- /dev/null +++ b/mmpose/apis/inferencers/base_mmpose_inferencer.py @@ -0,0 +1,691 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import inspect +import logging +import mimetypes +import os +from collections import defaultdict +from typing import (Callable, Dict, Generator, Iterable, List, Optional, + Sequence, Tuple, Union) + +import cv2 +import mmcv +import mmengine +import numpy as np +import torch.nn as nn +from mmengine.config import Config, ConfigDict +from mmengine.dataset import Compose +from mmengine.fileio import (get_file_backend, isdir, join_path, + list_dir_or_file) +from mmengine.infer.infer import BaseInferencer, ModelType +from mmengine.logging import print_log +from mmengine.registry import init_default_scope +from mmengine.runner.checkpoint import _load_checkpoint_to_model +from mmengine.structures import InstanceData +from mmengine.utils import mkdir_or_exist +from rich.progress import track + +from mmpose.apis.inference import dataset_meta_from_config +from mmpose.registry import DATASETS +from mmpose.structures import PoseDataSample, split_instances +from .utils import default_det_models + +try: + from mmdet.apis.det_inferencer import DetInferencer + has_mmdet = True +except (ImportError, ModuleNotFoundError): + has_mmdet = False + +InstanceList = List[InstanceData] +InputType = Union[str, np.ndarray] +InputsType = Union[InputType, Sequence[InputType]] +PredType = Union[InstanceData, InstanceList] +ImgType = Union[np.ndarray, Sequence[np.ndarray]] +ConfigType = Union[Config, ConfigDict] +ResType = Union[Dict, List[Dict], InstanceData, List[InstanceData]] + + +class BaseMMPoseInferencer(BaseInferencer): + """The base class for MMPose inferencers.""" + + preprocess_kwargs: set = {'bbox_thr', 'nms_thr', 'bboxes'} + forward_kwargs: set = set() + visualize_kwargs: set = { + 'return_vis', 'show', 'wait_time', 'draw_bbox', 'radius', 'thickness', + 'kpt_thr', 'vis_out_dir', 'black_background' + } + postprocess_kwargs: set = {'pred_out_dir', 'return_datasample'} + + def __init__(self, + model: Union[ModelType, str, None] = None, + weights: Optional[str] = None, + device: Optional[str] = None, + scope: Optional[str] = None, + show_progress: bool = False) -> None: + super().__init__( + model, weights, device, scope, show_progress=show_progress) + + def _init_detector( + self, + det_model: Optional[Union[ModelType, str]] = None, + det_weights: Optional[str] = None, + det_cat_ids: Optional[Union[int, Tuple]] = None, + device: Optional[str] = None, + ): + object_type = DATASETS.get(self.cfg.dataset_type).__module__.split( + 'datasets.')[-1].split('.')[0].lower() + + if det_model in ('whole_image', 'whole-image') or \ + (det_model is None and + object_type not in default_det_models): + self.detector = None + + else: + det_scope = 'mmdet' + if det_model is None: + det_info = default_det_models[object_type] + det_model, det_weights, det_cat_ids = det_info[ + 'model'], det_info['weights'], det_info['cat_ids'] + elif os.path.exists(det_model): + det_cfg = Config.fromfile(det_model) + det_scope = det_cfg.default_scope + + if has_mmdet: + det_kwargs = dict( + model=det_model, + weights=det_weights, + device=device, + scope=det_scope, + ) + # for compatibility with low version of mmdet + if 'show_progress' in inspect.signature( + DetInferencer).parameters: + det_kwargs['show_progress'] = False + + self.detector = DetInferencer(**det_kwargs) + else: + raise RuntimeError( + 'MMDetection (v3.0.0 or above) is required to build ' + 'inferencers for top-down pose estimation models.') + + if isinstance(det_cat_ids, (tuple, list)): + self.det_cat_ids = det_cat_ids + else: + self.det_cat_ids = (det_cat_ids, ) + + def _load_weights_to_model(self, model: nn.Module, + checkpoint: Optional[dict], + cfg: Optional[ConfigType]) -> None: + """Loading model weights and meta information from cfg and checkpoint. + + Subclasses could override this method to load extra meta information + from ``checkpoint`` and ``cfg`` to model. + + Args: + model (nn.Module): Model to load weights and meta information. + checkpoint (dict, optional): The loaded checkpoint. + cfg (Config or ConfigDict, optional): The loaded config. + """ + if checkpoint is not None: + _load_checkpoint_to_model(model, checkpoint) + checkpoint_meta = checkpoint.get('meta', {}) + # save the dataset_meta in the model for convenience + if 'dataset_meta' in checkpoint_meta: + # mmpose 1.x + model.dataset_meta = checkpoint_meta['dataset_meta'] + else: + print_log( + 'dataset_meta are not saved in the checkpoint\'s ' + 'meta data, load via config.', + logger='current', + level=logging.WARNING) + model.dataset_meta = dataset_meta_from_config( + cfg, dataset_mode='train') + else: + print_log( + 'Checkpoint is not loaded, and the inference ' + 'result is calculated by the randomly initialized ' + 'model!', + logger='current', + level=logging.WARNING) + model.dataset_meta = dataset_meta_from_config( + cfg, dataset_mode='train') + + def _inputs_to_list(self, inputs: InputsType) -> Iterable: + """Preprocess the inputs to a list. + + Preprocess inputs to a list according to its type: + + - list or tuple: return inputs + - str: + - Directory path: return all files in the directory + - other cases: return a list containing the string. The string + could be a path to file, a url or other types of string + according to the task. + + Args: + inputs (InputsType): Inputs for the inferencer. + + Returns: + list: List of input for the :meth:`preprocess`. + """ + self._video_input = False + + if isinstance(inputs, str): + backend = get_file_backend(inputs) + if hasattr(backend, 'isdir') and isdir(inputs): + # Backends like HttpsBackend do not implement `isdir`, so only + # those backends that implement `isdir` could accept the + # inputs as a directory + filepath_list = [ + join_path(inputs, fname) + for fname in list_dir_or_file(inputs, list_dir=False) + ] + inputs = [] + for filepath in filepath_list: + input_type = mimetypes.guess_type(filepath)[0].split( + '/')[0] + if input_type == 'image': + inputs.append(filepath) + inputs.sort() + else: + # if inputs is a path to a video file, it will be converted + # to a list containing separated frame filenames + input_type = mimetypes.guess_type(inputs)[0].split('/')[0] + if input_type == 'video': + self._video_input = True + video = mmcv.VideoReader(inputs) + self.video_info = dict( + fps=video.fps, + name=os.path.basename(inputs), + writer=None, + width=video.width, + height=video.height, + predictions=[]) + inputs = video + elif input_type == 'image': + inputs = [inputs] + else: + raise ValueError(f'Expected input to be an image, video, ' + f'or folder, but received {inputs} of ' + f'type {input_type}.') + + elif isinstance(inputs, np.ndarray): + inputs = [inputs] + + return inputs + + def _get_webcam_inputs(self, inputs: str) -> Generator: + """Sets up and returns a generator function that reads frames from a + webcam input. The generator function returns a new frame each time it + is iterated over. + + Args: + inputs (str): A string describing the webcam input, in the format + "webcam:id". + + Returns: + A generator function that yields frames from the webcam input. + + Raises: + ValueError: If the inputs string is not in the expected format. + """ + + # Ensure the inputs string is in the expected format. + inputs = inputs.lower() + assert inputs.startswith('webcam'), f'Expected input to start with ' \ + f'"webcam", but got "{inputs}"' + + # Parse the camera ID from the inputs string. + inputs_ = inputs.split(':') + if len(inputs_) == 1: + camera_id = 0 + elif len(inputs_) == 2 and str.isdigit(inputs_[1]): + camera_id = int(inputs_[1]) + else: + raise ValueError( + f'Expected webcam input to have format "webcam:id", ' + f'but got "{inputs}"') + + # Attempt to open the video capture object. + vcap = cv2.VideoCapture(camera_id) + if not vcap.isOpened(): + print_log( + f'Cannot open camera (ID={camera_id})', + logger='current', + level=logging.WARNING) + return [] + + # Set video input flag and metadata. + self._video_input = True + (major_ver, minor_ver, subminor_ver) = (cv2.__version__).split('.') + if int(major_ver) < 3: + fps = vcap.get(cv2.cv.CV_CAP_PROP_FPS) + width = vcap.get(cv2.cv.CV_CAP_PROP_FRAME_WIDTH) + height = vcap.get(cv2.cv.CV_CAP_PROP_FRAME_HEIGHT) + else: + fps = vcap.get(cv2.CAP_PROP_FPS) + width = vcap.get(cv2.CAP_PROP_FRAME_WIDTH) + height = vcap.get(cv2.CAP_PROP_FRAME_HEIGHT) + self.video_info = dict( + fps=fps, + name='webcam.mp4', + writer=None, + width=width, + height=height, + predictions=[]) + + def _webcam_reader() -> Generator: + while True: + if cv2.waitKey(5) & 0xFF == 27: + vcap.release() + break + + ret_val, frame = vcap.read() + if not ret_val: + break + + yield frame + + return _webcam_reader() + + def _init_pipeline(self, cfg: ConfigType) -> Callable: + """Initialize the test pipeline. + + Args: + cfg (ConfigType): model config path or dict + + Returns: + A pipeline to handle various input data, such as ``str``, + ``np.ndarray``. The returned pipeline will be used to process + a single data. + """ + scope = cfg.get('default_scope', 'mmpose') + if scope is not None: + init_default_scope(scope) + return Compose(cfg.test_dataloader.dataset.pipeline) + + def update_model_visualizer_settings(self, **kwargs): + """Update the settings of models and visualizer according to inference + arguments.""" + + pass + + def preprocess(self, + inputs: InputsType, + batch_size: int = 1, + bboxes: Optional[List] = None, + bbox_thr: float = 0.3, + nms_thr: float = 0.3, + **kwargs): + """Process the inputs into a model-feedable format. + + Args: + inputs (InputsType): Inputs given by user. + batch_size (int): batch size. Defaults to 1. + bbox_thr (float): threshold for bounding box detection. + Defaults to 0.3. + nms_thr (float): IoU threshold for bounding box NMS. + Defaults to 0.3. + + Yields: + Any: Data processed by the ``pipeline`` and ``collate_fn``. + List[str or np.ndarray]: List of original inputs in the batch + """ + + # One-stage pose estimators perform prediction filtering within the + # head's `predict` method. Here, we set the arguments for filtering + if self.cfg.model.type == 'BottomupPoseEstimator': + # 1. init with default arguments + test_cfg = self.model.head.test_cfg.copy() + # 2. update the score_thr and nms_thr in the test_cfg of the head + if 'score_thr' in test_cfg: + test_cfg['score_thr'] = bbox_thr + if 'nms_thr' in test_cfg: + test_cfg['nms_thr'] = nms_thr + self.model.test_cfg = test_cfg + + for i, input in enumerate(inputs): + bbox = bboxes[i] if bboxes else [] + data_infos = self.preprocess_single( + input, + index=i, + bboxes=bbox, + bbox_thr=bbox_thr, + nms_thr=nms_thr, + **kwargs) + # only supports inference with batch size 1 + yield self.collate_fn(data_infos), [input] + + def __call__( + self, + inputs: InputsType, + return_datasamples: bool = False, + batch_size: int = 1, + out_dir: Optional[str] = None, + **kwargs, + ) -> dict: + """Call the inferencer. + + Args: + inputs (InputsType): Inputs for the inferencer. + return_datasamples (bool): Whether to return results as + :obj:`BaseDataElement`. Defaults to False. + batch_size (int): Batch size. Defaults to 1. + out_dir (str, optional): directory to save visualization + results and predictions. Will be overoden if vis_out_dir or + pred_out_dir are given. Defaults to None + **kwargs: Key words arguments passed to :meth:`preprocess`, + :meth:`forward`, :meth:`visualize` and :meth:`postprocess`. + Each key in kwargs should be in the corresponding set of + ``preprocess_kwargs``, ``forward_kwargs``, + ``visualize_kwargs`` and ``postprocess_kwargs``. + + Returns: + dict: Inference and visualization results. + """ + if out_dir is not None: + if 'vis_out_dir' not in kwargs: + kwargs['vis_out_dir'] = f'{out_dir}/visualizations' + if 'pred_out_dir' not in kwargs: + kwargs['pred_out_dir'] = f'{out_dir}/predictions' + + ( + preprocess_kwargs, + forward_kwargs, + visualize_kwargs, + postprocess_kwargs, + ) = self._dispatch_kwargs(**kwargs) + + self.update_model_visualizer_settings(**kwargs) + + # preprocessing + if isinstance(inputs, str) and inputs.startswith('webcam'): + inputs = self._get_webcam_inputs(inputs) + batch_size = 1 + if not visualize_kwargs.get('show', False): + print_log( + 'The display mode is closed when using webcam ' + 'input. It will be turned on automatically.', + logger='current', + level=logging.WARNING) + visualize_kwargs['show'] = True + else: + inputs = self._inputs_to_list(inputs) + + # check the compatibility between inputs/outputs + if not self._video_input and len(inputs) > 0: + vis_out_dir = visualize_kwargs.get('vis_out_dir', None) + if vis_out_dir is not None: + _, file_extension = os.path.splitext(vis_out_dir) + assert not file_extension, f'the argument `vis_out_dir` ' \ + f'should be a folder while the input contains multiple ' \ + f'images, but got {vis_out_dir}' + + if 'bbox_thr' in self.forward_kwargs: + forward_kwargs['bbox_thr'] = preprocess_kwargs.get('bbox_thr', -1) + inputs = self.preprocess( + inputs, batch_size=batch_size, **preprocess_kwargs) + + preds = [] + + for proc_inputs, ori_inputs in (track(inputs, description='Inference') + if self.show_progress else inputs): + preds = self.forward(proc_inputs, **forward_kwargs) + + visualization = self.visualize(ori_inputs, preds, + **visualize_kwargs) + results = self.postprocess( + preds, + visualization, + return_datasamples=return_datasamples, + **postprocess_kwargs) + yield results + + if self._video_input: + self._finalize_video_processing( + postprocess_kwargs.get('pred_out_dir', '')) + + # In 3D Inferencers, some intermediate results (e.g. 2d keypoints) + # will be temporarily stored in `self._buffer`. It's essential to + # clear this information to prevent any interference with subsequent + # inferences. + if hasattr(self, '_buffer'): + self._buffer.clear() + + def visualize(self, + inputs: list, + preds: List[PoseDataSample], + return_vis: bool = False, + show: bool = False, + draw_bbox: bool = False, + wait_time: float = 0, + radius: int = 3, + thickness: int = 1, + kpt_thr: float = 0.3, + vis_out_dir: str = '', + window_name: str = '', + black_background: bool = False, + **kwargs) -> List[np.ndarray]: + """Visualize predictions. + + Args: + inputs (list): Inputs preprocessed by :meth:`_inputs_to_list`. + preds (Any): Predictions of the model. + return_vis (bool): Whether to return images with predicted results. + show (bool): Whether to display the image in a popup window. + Defaults to False. + wait_time (float): The interval of show (ms). Defaults to 0 + draw_bbox (bool): Whether to draw the bounding boxes. + Defaults to False + radius (int): Keypoint radius for visualization. Defaults to 3 + thickness (int): Link thickness for visualization. Defaults to 1 + kpt_thr (float): The threshold to visualize the keypoints. + Defaults to 0.3 + vis_out_dir (str, optional): Directory to save visualization + results w/o predictions. If left as empty, no file will + be saved. Defaults to ''. + window_name (str, optional): Title of display window. + black_background (bool, optional): Whether to plot keypoints on a + black image instead of the input image. Defaults to False. + + Returns: + List[np.ndarray]: Visualization results. + """ + if (not return_vis) and (not show) and (not vis_out_dir): + return + + if getattr(self, 'visualizer', None) is None: + raise ValueError('Visualization needs the "visualizer" term' + 'defined in the config, but got None.') + + self.visualizer.radius = radius + self.visualizer.line_width = thickness + + results = [] + + for single_input, pred in zip(inputs, preds): + if isinstance(single_input, str): + img = mmcv.imread(single_input, channel_order='rgb') + elif isinstance(single_input, np.ndarray): + img = mmcv.bgr2rgb(single_input) + else: + raise ValueError('Unsupported input type: ' + f'{type(single_input)}') + if black_background: + img = img * 0 + + img_name = os.path.basename(pred.metainfo['img_path']) + window_name = window_name if window_name else img_name + + # since visualization and inference utilize the same process, + # the wait time is reduced when a video input is utilized, + # thereby eliminating the issue of inference getting stuck. + wait_time = 1e-5 if self._video_input else wait_time + + visualization = self.visualizer.add_datasample( + window_name, + img, + pred, + draw_gt=False, + draw_bbox=draw_bbox, + show=show, + wait_time=wait_time, + kpt_thr=kpt_thr, + **kwargs) + results.append(visualization) + + if vis_out_dir: + self.save_visualization( + visualization, + vis_out_dir, + img_name=img_name, + ) + + if return_vis: + return results + else: + return [] + + def save_visualization(self, visualization, vis_out_dir, img_name=None): + out_img = mmcv.rgb2bgr(visualization) + _, file_extension = os.path.splitext(vis_out_dir) + if file_extension: + dir_name = os.path.dirname(vis_out_dir) + file_name = os.path.basename(vis_out_dir) + else: + dir_name = vis_out_dir + file_name = None + mkdir_or_exist(dir_name) + + if self._video_input: + + if self.video_info['writer'] is None: + fourcc = cv2.VideoWriter_fourcc(*'mp4v') + if file_name is None: + file_name = os.path.basename(self.video_info['name']) + out_file = join_path(dir_name, file_name) + self.video_info['output_file'] = out_file + self.video_info['writer'] = cv2.VideoWriter( + out_file, fourcc, self.video_info['fps'], + (visualization.shape[1], visualization.shape[0])) + self.video_info['writer'].write(out_img) + + else: + if file_name is None: + file_name = img_name if img_name else 'visualization.jpg' + + out_file = join_path(dir_name, file_name) + mmcv.imwrite(out_img, out_file) + print_log( + f'the output image has been saved at {out_file}', + logger='current', + level=logging.INFO) + + def postprocess( + self, + preds: List[PoseDataSample], + visualization: List[np.ndarray], + return_datasample=None, + return_datasamples=False, + pred_out_dir: str = '', + ) -> dict: + """Process the predictions and visualization results from ``forward`` + and ``visualize``. + + This method should be responsible for the following tasks: + + 1. Convert datasamples into a json-serializable dict if needed. + 2. Pack the predictions and visualization results and return them. + 3. Dump or log the predictions. + + Args: + preds (List[Dict]): Predictions of the model. + visualization (np.ndarray): Visualized predictions. + return_datasamples (bool): Whether to return results as + datasamples. Defaults to False. + pred_out_dir (str): Directory to save the inference results w/o + visualization. If left as empty, no file will be saved. + Defaults to ''. + + Returns: + dict: Inference and visualization results with key ``predictions`` + and ``visualization`` + + - ``visualization (Any)``: Returned by :meth:`visualize` + - ``predictions`` (dict or DataSample): Returned by + :meth:`forward` and processed in :meth:`postprocess`. + If ``return_datasamples=False``, it usually should be a + json-serializable dict containing only basic data elements such + as strings and numbers. + """ + if return_datasample is not None: + print_log( + 'The `return_datasample` argument is deprecated ' + 'and will be removed in future versions. Please ' + 'use `return_datasamples`.', + logger='current', + level=logging.WARNING) + return_datasamples = return_datasample + + result_dict = defaultdict(list) + + result_dict['visualization'] = visualization + for pred in preds: + if not return_datasamples: + # convert datasamples to list of instance predictions + pred = split_instances(pred.pred_instances) + result_dict['predictions'].append(pred) + + if pred_out_dir != '': + for pred, data_sample in zip(result_dict['predictions'], preds): + if self._video_input: + # For video or webcam input, predictions for each frame + # are gathered in the 'predictions' key of 'video_info' + # dictionary. All frame predictions are then stored into + # a single file after processing all frames. + self.video_info['predictions'].append(pred) + else: + # For non-video inputs, predictions are stored in separate + # JSON files. The filename is determined by the basename + # of the input image path with a '.json' extension. The + # predictions are then dumped into this file. + fname = os.path.splitext( + os.path.basename( + data_sample.metainfo['img_path']))[0] + '.json' + mmengine.dump( + pred, join_path(pred_out_dir, fname), indent=' ') + + return result_dict + + def _finalize_video_processing( + self, + pred_out_dir: str = '', + ): + """Finalize video processing by releasing the video writer and saving + predictions to a file. + + This method should be called after completing the video processing. It + releases the video writer, if it exists, and saves the predictions to a + JSON file if a prediction output directory is provided. + """ + + # Release the video writer if it exists + if self.video_info['writer'] is not None: + out_file = self.video_info['output_file'] + print_log( + f'the output video has been saved at {out_file}', + logger='current', + level=logging.INFO) + self.video_info['writer'].release() + + # Save predictions + if pred_out_dir: + fname = os.path.splitext( + os.path.basename(self.video_info['name']))[0] + '.json' + predictions = [ + dict(frame_id=i, instances=pred) + for i, pred in enumerate(self.video_info['predictions']) + ] + + mmengine.dump( + predictions, join_path(pred_out_dir, fname), indent=' ') diff --git a/mmpose/apis/inferencers/hand3d_inferencer.py b/mmpose/apis/inferencers/hand3d_inferencer.py new file mode 100644 index 0000000000000000000000000000000000000000..a7db53cb84bf0fc8abc0903a9d311da42502f097 --- /dev/null +++ b/mmpose/apis/inferencers/hand3d_inferencer.py @@ -0,0 +1,344 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import logging +import os +from collections import defaultdict +from typing import Dict, List, Optional, Sequence, Tuple, Union + +import mmcv +import numpy as np +import torch +from mmengine.config import Config, ConfigDict +from mmengine.infer.infer import ModelType +from mmengine.logging import print_log +from mmengine.model import revert_sync_batchnorm +from mmengine.registry import init_default_scope +from mmengine.structures import InstanceData + +from mmpose.evaluation.functional import nms +from mmpose.registry import INFERENCERS +from mmpose.structures import PoseDataSample, merge_data_samples +from .base_mmpose_inferencer import BaseMMPoseInferencer + +InstanceList = List[InstanceData] +InputType = Union[str, np.ndarray] +InputsType = Union[InputType, Sequence[InputType]] +PredType = Union[InstanceData, InstanceList] +ImgType = Union[np.ndarray, Sequence[np.ndarray]] +ConfigType = Union[Config, ConfigDict] +ResType = Union[Dict, List[Dict], InstanceData, List[InstanceData]] + + +@INFERENCERS.register_module() +class Hand3DInferencer(BaseMMPoseInferencer): + """The inferencer for 3D hand pose estimation. + + Args: + model (str, optional): Pretrained 2D pose estimation algorithm. + It's the path to the config file or the model name defined in + metafile. For example, it could be: + + - model alias, e.g. ``'body'``, + - config name, e.g. ``'simcc_res50_8xb64-210e_coco-256x192'``, + - config path + + Defaults to ``None``. + weights (str, optional): Path to the checkpoint. If it is not + specified and "model" is a model name of metafile, the weights + will be loaded from metafile. Defaults to None. + device (str, optional): Device to run inference. If None, the + available device will be automatically used. Defaults to None. + scope (str, optional): The scope of the model. Defaults to "mmpose". + det_model (str, optional): Config path or alias of detection model. + Defaults to None. + det_weights (str, optional): Path to the checkpoints of detection + model. Defaults to None. + det_cat_ids (int or list[int], optional): Category id for + detection model. Defaults to None. + """ + + preprocess_kwargs: set = {'bbox_thr', 'nms_thr', 'bboxes'} + forward_kwargs: set = {'disable_rebase_keypoint'} + visualize_kwargs: set = { + 'return_vis', + 'show', + 'wait_time', + 'draw_bbox', + 'radius', + 'thickness', + 'kpt_thr', + 'vis_out_dir', + 'num_instances', + } + postprocess_kwargs: set = {'pred_out_dir', 'return_datasample'} + + def __init__(self, + model: Union[ModelType, str], + weights: Optional[str] = None, + device: Optional[str] = None, + scope: Optional[str] = 'mmpose', + det_model: Optional[Union[ModelType, str]] = None, + det_weights: Optional[str] = None, + det_cat_ids: Optional[Union[int, Tuple]] = None, + show_progress: bool = False) -> None: + + init_default_scope(scope) + super().__init__( + model=model, + weights=weights, + device=device, + scope=scope, + show_progress=show_progress) + self.model = revert_sync_batchnorm(self.model) + + # assign dataset metainfo to self.visualizer + self.visualizer.set_dataset_meta(self.model.dataset_meta) + + # initialize hand detector + self._init_detector( + det_model=det_model, + det_weights=det_weights, + det_cat_ids=det_cat_ids, + device=device, + ) + + self._video_input = False + self._buffer = defaultdict(list) + + def preprocess_single(self, + input: InputType, + index: int, + bbox_thr: float = 0.3, + nms_thr: float = 0.3, + bboxes: Union[List[List], List[np.ndarray], + np.ndarray] = []): + """Process a single input into a model-feedable format. + + Args: + input (InputType): Input given by user. + index (int): index of the input + bbox_thr (float): threshold for bounding box detection. + Defaults to 0.3. + nms_thr (float): IoU threshold for bounding box NMS. + Defaults to 0.3. + + Yields: + Any: Data processed by the ``pipeline`` and ``collate_fn``. + """ + + if isinstance(input, str): + data_info = dict(img_path=input) + else: + data_info = dict(img=input, img_path=f'{index}.jpg'.rjust(10, '0')) + data_info.update(self.model.dataset_meta) + + if self.detector is not None: + try: + det_results = self.detector( + input, return_datasamples=True)['predictions'] + except ValueError: + print_log( + 'Support for mmpose and mmdet versions up to 3.1.0 ' + 'will be discontinued in upcoming releases. To ' + 'ensure ongoing compatibility, please upgrade to ' + 'mmdet version 3.2.0 or later.', + logger='current', + level=logging.WARNING) + det_results = self.detector( + input, return_datasample=True)['predictions'] + pred_instance = det_results[0].pred_instances.cpu().numpy() + bboxes = np.concatenate( + (pred_instance.bboxes, pred_instance.scores[:, None]), axis=1) + + label_mask = np.zeros(len(bboxes), dtype=np.uint8) + for cat_id in self.det_cat_ids: + label_mask = np.logical_or(label_mask, + pred_instance.labels == cat_id) + + bboxes = bboxes[np.logical_and(label_mask, + pred_instance.scores > bbox_thr)] + bboxes = bboxes[nms(bboxes, nms_thr)] + + data_infos = [] + if len(bboxes) > 0: + for bbox in bboxes: + inst = data_info.copy() + inst['bbox'] = bbox[None, :4] + inst['bbox_score'] = bbox[4:5] + data_infos.append(self.pipeline(inst)) + else: + inst = data_info.copy() + + # get bbox from the image size + if isinstance(input, str): + input = mmcv.imread(input) + h, w = input.shape[:2] + + inst['bbox'] = np.array([[0, 0, w, h]], dtype=np.float32) + inst['bbox_score'] = np.ones(1, dtype=np.float32) + data_infos.append(self.pipeline(inst)) + + return data_infos + + @torch.no_grad() + def forward(self, + inputs: Union[dict, tuple], + disable_rebase_keypoint: bool = False): + """Performs a forward pass through the model. + + Args: + inputs (Union[dict, tuple]): The input data to be processed. Can + be either a dictionary or a tuple. + disable_rebase_keypoint (bool, optional): Flag to disable rebasing + the height of the keypoints. Defaults to False. + + Returns: + A list of data samples with prediction instances. + """ + data_samples = self.model.test_step(inputs) + data_samples_2d = [] + + for idx, res in enumerate(data_samples): + pred_instances = res.pred_instances + keypoints = pred_instances.keypoints + rel_root_depth = pred_instances.rel_root_depth + scores = pred_instances.keypoint_scores + hand_type = pred_instances.hand_type + + res_2d = PoseDataSample() + gt_instances = res.gt_instances.clone() + pred_instances = pred_instances.clone() + res_2d.gt_instances = gt_instances + res_2d.pred_instances = pred_instances + + # add relative root depth to left hand joints + keypoints[:, 21:, 2] += rel_root_depth + + # set joint scores according to hand type + scores[:, :21] *= hand_type[:, [0]] + scores[:, 21:] *= hand_type[:, [1]] + # normalize kpt score + if scores.max() > 1: + scores /= 255 + + res_2d.pred_instances.set_field(keypoints[..., :2].copy(), + 'keypoints') + + # rotate the keypoint to make z-axis correspondent to height + # for better visualization + vis_R = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]]) + keypoints[..., :3] = keypoints[..., :3] @ vis_R + + # rebase height (z-axis) + if not disable_rebase_keypoint: + valid = scores > 0 + keypoints[..., 2] -= np.min( + keypoints[valid, 2], axis=-1, keepdims=True) + + data_samples[idx].pred_instances.keypoints = keypoints + data_samples[idx].pred_instances.keypoint_scores = scores + data_samples_2d.append(res_2d) + + data_samples = [merge_data_samples(data_samples)] + data_samples_2d = merge_data_samples(data_samples_2d) + + self._buffer['pose2d_results'] = data_samples_2d + + return data_samples + + def visualize( + self, + inputs: list, + preds: List[PoseDataSample], + return_vis: bool = False, + show: bool = False, + draw_bbox: bool = False, + wait_time: float = 0, + radius: int = 3, + thickness: int = 1, + kpt_thr: float = 0.3, + num_instances: int = 1, + vis_out_dir: str = '', + window_name: str = '', + ) -> List[np.ndarray]: + """Visualize predictions. + + Args: + inputs (list): Inputs preprocessed by :meth:`_inputs_to_list`. + preds (Any): Predictions of the model. + return_vis (bool): Whether to return images with predicted results. + show (bool): Whether to display the image in a popup window. + Defaults to False. + wait_time (float): The interval of show (ms). Defaults to 0 + draw_bbox (bool): Whether to draw the bounding boxes. + Defaults to False + radius (int): Keypoint radius for visualization. Defaults to 3 + thickness (int): Link thickness for visualization. Defaults to 1 + kpt_thr (float): The threshold to visualize the keypoints. + Defaults to 0.3 + vis_out_dir (str, optional): Directory to save visualization + results w/o predictions. If left as empty, no file will + be saved. Defaults to ''. + window_name (str, optional): Title of display window. + window_close_event_handler (callable, optional): + + Returns: + List[np.ndarray]: Visualization results. + """ + if (not return_vis) and (not show) and (not vis_out_dir): + return + + if getattr(self, 'visualizer', None) is None: + raise ValueError('Visualization needs the "visualizer" term' + 'defined in the config, but got None.') + + self.visualizer.radius = radius + self.visualizer.line_width = thickness + + results = [] + + for single_input, pred in zip(inputs, preds): + if isinstance(single_input, str): + img = mmcv.imread(single_input, channel_order='rgb') + elif isinstance(single_input, np.ndarray): + img = mmcv.bgr2rgb(single_input) + else: + raise ValueError('Unsupported input type: ' + f'{type(single_input)}') + img_name = os.path.basename(pred.metainfo['img_path']) + + # since visualization and inference utilize the same process, + # the wait time is reduced when a video input is utilized, + # thereby eliminating the issue of inference getting stuck. + wait_time = 1e-5 if self._video_input else wait_time + + if num_instances < 0: + num_instances = len(pred.pred_instances) + + visualization = self.visualizer.add_datasample( + window_name, + img, + data_sample=pred, + det_data_sample=self._buffer['pose2d_results'], + draw_gt=False, + draw_bbox=draw_bbox, + show=show, + wait_time=wait_time, + convert_keypoint=False, + axis_azimuth=-115, + axis_limit=200, + axis_elev=15, + kpt_thr=kpt_thr, + num_instances=num_instances) + results.append(visualization) + + if vis_out_dir: + self.save_visualization( + visualization, + vis_out_dir, + img_name=img_name, + ) + + if return_vis: + return results + else: + return [] diff --git a/mmpose/apis/inferencers/mmpose_inferencer.py b/mmpose/apis/inferencers/mmpose_inferencer.py new file mode 100644 index 0000000000000000000000000000000000000000..4ade56cb04cf7a5b18758fd90430ae894d34983f --- /dev/null +++ b/mmpose/apis/inferencers/mmpose_inferencer.py @@ -0,0 +1,250 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import warnings +from typing import Dict, List, Optional, Sequence, Union + +import numpy as np +import torch +from mmengine.config import Config, ConfigDict +from mmengine.infer.infer import ModelType +from mmengine.structures import InstanceData +from rich.progress import track + +from .base_mmpose_inferencer import BaseMMPoseInferencer +from .hand3d_inferencer import Hand3DInferencer +from .pose2d_inferencer import Pose2DInferencer +from .pose3d_inferencer import Pose3DInferencer + +InstanceList = List[InstanceData] +InputType = Union[str, np.ndarray] +InputsType = Union[InputType, Sequence[InputType]] +PredType = Union[InstanceData, InstanceList] +ImgType = Union[np.ndarray, Sequence[np.ndarray]] +ConfigType = Union[Config, ConfigDict] +ResType = Union[Dict, List[Dict], InstanceData, List[InstanceData]] + + +class MMPoseInferencer(BaseMMPoseInferencer): + """MMPose Inferencer. It's a unified inferencer interface for pose + estimation task, currently including: Pose2D. and it can be used to perform + 2D keypoint detection. + + Args: + pose2d (str, optional): Pretrained 2D pose estimation algorithm. + It's the path to the config file or the model name defined in + metafile. For example, it could be: + + - model alias, e.g. ``'body'``, + - config name, e.g. ``'simcc_res50_8xb64-210e_coco-256x192'``, + - config path + + Defaults to ``None``. + pose2d_weights (str, optional): Path to the custom checkpoint file of + the selected pose2d model. If it is not specified and "pose2d" is + a model name of metafile, the weights will be loaded from + metafile. Defaults to None. + device (str, optional): Device to run inference. If None, the + available device will be automatically used. Defaults to None. + scope (str, optional): The scope of the model. Defaults to "mmpose". + det_model(str, optional): Config path or alias of detection model. + Defaults to None. + det_weights(str, optional): Path to the checkpoints of detection + model. Defaults to None. + det_cat_ids(int or list[int], optional): Category id for + detection model. Defaults to None. + output_heatmaps (bool, optional): Flag to visualize predicted + heatmaps. If set to None, the default setting from the model + config will be used. Default is None. + """ + + preprocess_kwargs: set = { + 'bbox_thr', 'nms_thr', 'bboxes', 'use_oks_tracking', 'tracking_thr', + 'disable_norm_pose_2d' + } + forward_kwargs: set = { + 'merge_results', 'disable_rebase_keypoint', 'pose_based_nms' + } + visualize_kwargs: set = { + 'return_vis', 'show', 'wait_time', 'draw_bbox', 'radius', 'thickness', + 'kpt_thr', 'vis_out_dir', 'skeleton_style', 'draw_heatmap', + 'black_background', 'num_instances' + } + postprocess_kwargs: set = {'pred_out_dir', 'return_datasample'} + + def __init__(self, + pose2d: Optional[str] = None, + pose2d_weights: Optional[str] = None, + pose3d: Optional[str] = None, + pose3d_weights: Optional[str] = None, + device: Optional[str] = None, + scope: str = 'mmpose', + det_model: Optional[Union[ModelType, str]] = None, + det_weights: Optional[str] = None, + det_cat_ids: Optional[Union[int, List]] = None, + show_progress: bool = False) -> None: + + self.visualizer = None + self.show_progress = show_progress + if pose3d is not None: + if 'hand3d' in pose3d: + self.inferencer = Hand3DInferencer(pose3d, pose3d_weights, + device, scope, det_model, + det_weights, det_cat_ids, + show_progress) + else: + self.inferencer = Pose3DInferencer(pose3d, pose3d_weights, + pose2d, pose2d_weights, + device, scope, det_model, + det_weights, det_cat_ids, + show_progress) + elif pose2d is not None: + self.inferencer = Pose2DInferencer(pose2d, pose2d_weights, device, + scope, det_model, det_weights, + det_cat_ids, show_progress) + else: + raise ValueError('Either 2d or 3d pose estimation algorithm ' + 'should be provided.') + + def preprocess(self, inputs: InputsType, batch_size: int = 1, **kwargs): + """Process the inputs into a model-feedable format. + + Args: + inputs (InputsType): Inputs given by user. + batch_size (int): batch size. Defaults to 1. + + Yields: + Any: Data processed by the ``pipeline`` and ``collate_fn``. + List[str or np.ndarray]: List of original inputs in the batch + """ + for data in self.inferencer.preprocess(inputs, batch_size, **kwargs): + yield data + + @torch.no_grad() + def forward(self, inputs: InputType, **forward_kwargs) -> PredType: + """Forward the inputs to the model. + + Args: + inputs (InputsType): The inputs to be forwarded. + + Returns: + Dict: The prediction results. Possibly with keys "pose2d". + """ + return self.inferencer.forward(inputs, **forward_kwargs) + + def __call__( + self, + inputs: InputsType, + return_datasamples: bool = False, + batch_size: int = 1, + out_dir: Optional[str] = None, + **kwargs, + ) -> dict: + """Call the inferencer. + + Args: + inputs (InputsType): Inputs for the inferencer. + return_datasamples (bool): Whether to return results as + :obj:`BaseDataElement`. Defaults to False. + batch_size (int): Batch size. Defaults to 1. + out_dir (str, optional): directory to save visualization + results and predictions. Will be overoden if vis_out_dir or + pred_out_dir are given. Defaults to None + **kwargs: Key words arguments passed to :meth:`preprocess`, + :meth:`forward`, :meth:`visualize` and :meth:`postprocess`. + Each key in kwargs should be in the corresponding set of + ``preprocess_kwargs``, ``forward_kwargs``, + ``visualize_kwargs`` and ``postprocess_kwargs``. + + Returns: + dict: Inference and visualization results. + """ + if out_dir is not None: + if 'vis_out_dir' not in kwargs: + kwargs['vis_out_dir'] = f'{out_dir}/visualizations' + if 'pred_out_dir' not in kwargs: + kwargs['pred_out_dir'] = f'{out_dir}/predictions' + + kwargs = { + key: value + for key, value in kwargs.items() + if key in set.union(self.inferencer.preprocess_kwargs, + self.inferencer.forward_kwargs, + self.inferencer.visualize_kwargs, + self.inferencer.postprocess_kwargs) + } + ( + preprocess_kwargs, + forward_kwargs, + visualize_kwargs, + postprocess_kwargs, + ) = self._dispatch_kwargs(**kwargs) + + self.inferencer.update_model_visualizer_settings(**kwargs) + + # preprocessing + if isinstance(inputs, str) and inputs.startswith('webcam'): + inputs = self.inferencer._get_webcam_inputs(inputs) + batch_size = 1 + if not visualize_kwargs.get('show', False): + warnings.warn('The display mode is closed when using webcam ' + 'input. It will be turned on automatically.') + visualize_kwargs['show'] = True + else: + inputs = self.inferencer._inputs_to_list(inputs) + self._video_input = self.inferencer._video_input + if self._video_input: + self.video_info = self.inferencer.video_info + + inputs = self.preprocess( + inputs, batch_size=batch_size, **preprocess_kwargs) + + # forward + if 'bbox_thr' in self.inferencer.forward_kwargs: + forward_kwargs['bbox_thr'] = preprocess_kwargs.get('bbox_thr', -1) + + preds = [] + + for proc_inputs, ori_inputs in (track(inputs, description='Inference') + if self.show_progress else inputs): + preds = self.forward(proc_inputs, **forward_kwargs) + + visualization = self.visualize(ori_inputs, preds, + **visualize_kwargs) + results = self.postprocess( + preds, + visualization, + return_datasamples=return_datasamples, + **postprocess_kwargs) + yield results + + if self._video_input: + self._finalize_video_processing( + postprocess_kwargs.get('pred_out_dir', '')) + + def visualize(self, inputs: InputsType, preds: PredType, + **kwargs) -> List[np.ndarray]: + """Visualize predictions. + + Args: + inputs (list): Inputs preprocessed by :meth:`_inputs_to_list`. + preds (Any): Predictions of the model. + return_vis (bool): Whether to return images with predicted results. + show (bool): Whether to display the image in a popup window. + Defaults to False. + show_interval (int): The interval of show (s). Defaults to 0 + radius (int): Keypoint radius for visualization. Defaults to 3 + thickness (int): Link thickness for visualization. Defaults to 1 + kpt_thr (float): The threshold to visualize the keypoints. + Defaults to 0.3 + vis_out_dir (str, optional): directory to save visualization + results w/o predictions. If left as empty, no file will + be saved. Defaults to ''. + + Returns: + List[np.ndarray]: Visualization results. + """ + window_name = '' + if self.inferencer._video_input: + window_name = self.inferencer.video_info['name'] + + return self.inferencer.visualize( + inputs, preds, window_name=window_name, **kwargs) diff --git a/mmpose/apis/inferencers/pose2d_inferencer.py b/mmpose/apis/inferencers/pose2d_inferencer.py new file mode 100644 index 0000000000000000000000000000000000000000..8b6a2c3e96f9d537bccab05eed01de4a951377ca --- /dev/null +++ b/mmpose/apis/inferencers/pose2d_inferencer.py @@ -0,0 +1,262 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import logging +from typing import Dict, List, Optional, Sequence, Tuple, Union + +import mmcv +import numpy as np +import torch +from mmengine.config import Config, ConfigDict +from mmengine.infer.infer import ModelType +from mmengine.logging import print_log +from mmengine.model import revert_sync_batchnorm +from mmengine.registry import init_default_scope +from mmengine.structures import InstanceData + +from mmpose.evaluation.functional import nearby_joints_nms, nms +from mmpose.registry import INFERENCERS +from mmpose.structures import merge_data_samples +from .base_mmpose_inferencer import BaseMMPoseInferencer + +InstanceList = List[InstanceData] +InputType = Union[str, np.ndarray] +InputsType = Union[InputType, Sequence[InputType]] +PredType = Union[InstanceData, InstanceList] +ImgType = Union[np.ndarray, Sequence[np.ndarray]] +ConfigType = Union[Config, ConfigDict] +ResType = Union[Dict, List[Dict], InstanceData, List[InstanceData]] + + +@INFERENCERS.register_module(name='pose-estimation') +@INFERENCERS.register_module() +class Pose2DInferencer(BaseMMPoseInferencer): + """The inferencer for 2D pose estimation. + + Args: + model (str, optional): Pretrained 2D pose estimation algorithm. + It's the path to the config file or the model name defined in + metafile. For example, it could be: + + - model alias, e.g. ``'body'``, + - config name, e.g. ``'simcc_res50_8xb64-210e_coco-256x192'``, + - config path + + Defaults to ``None``. + weights (str, optional): Path to the checkpoint. If it is not + specified and "model" is a model name of metafile, the weights + will be loaded from metafile. Defaults to None. + device (str, optional): Device to run inference. If None, the + available device will be automatically used. Defaults to None. + scope (str, optional): The scope of the model. Defaults to "mmpose". + det_model (str, optional): Config path or alias of detection model. + Defaults to None. + det_weights (str, optional): Path to the checkpoints of detection + model. Defaults to None. + det_cat_ids (int or list[int], optional): Category id for + detection model. Defaults to None. + """ + + preprocess_kwargs: set = {'bbox_thr', 'nms_thr', 'bboxes'} + forward_kwargs: set = {'merge_results', 'pose_based_nms'} + visualize_kwargs: set = { + 'return_vis', + 'show', + 'wait_time', + 'draw_bbox', + 'radius', + 'thickness', + 'kpt_thr', + 'vis_out_dir', + 'skeleton_style', + 'draw_heatmap', + 'black_background', + } + postprocess_kwargs: set = {'pred_out_dir', 'return_datasample'} + + def __init__(self, + model: Union[ModelType, str], + weights: Optional[str] = None, + device: Optional[str] = None, + scope: Optional[str] = 'mmpose', + det_model: Optional[Union[ModelType, str]] = None, + det_weights: Optional[str] = None, + det_cat_ids: Optional[Union[int, Tuple]] = None, + show_progress: bool = False) -> None: + + init_default_scope(scope) + super().__init__( + model=model, + weights=weights, + device=device, + scope=scope, + show_progress=show_progress) + self.model = revert_sync_batchnorm(self.model) + + # assign dataset metainfo to self.visualizer + self.visualizer.set_dataset_meta(self.model.dataset_meta) + + # initialize detector for top-down models + if self.cfg.data_mode == 'topdown': + self._init_detector( + det_model=det_model, + det_weights=det_weights, + det_cat_ids=det_cat_ids, + device=device, + ) + + self._video_input = False + + def update_model_visualizer_settings(self, + draw_heatmap: bool = False, + skeleton_style: str = 'mmpose', + **kwargs) -> None: + """Update the settings of models and visualizer according to inference + arguments. + + Args: + draw_heatmaps (bool, optional): Flag to visualize predicted + heatmaps. If not provided, it defaults to False. + skeleton_style (str, optional): Skeleton style selection. Valid + options are 'mmpose' and 'openpose'. Defaults to 'mmpose'. + """ + self.model.test_cfg['output_heatmaps'] = draw_heatmap + + if skeleton_style not in ['mmpose', 'openpose']: + raise ValueError('`skeleton_style` must be either \'mmpose\' ' + 'or \'openpose\'') + + if skeleton_style == 'openpose': + self.visualizer.set_dataset_meta(self.model.dataset_meta, + skeleton_style) + + def preprocess_single(self, + input: InputType, + index: int, + bbox_thr: float = 0.3, + nms_thr: float = 0.3, + bboxes: Union[List[List], List[np.ndarray], + np.ndarray] = []): + """Process a single input into a model-feedable format. + + Args: + input (InputType): Input given by user. + index (int): index of the input + bbox_thr (float): threshold for bounding box detection. + Defaults to 0.3. + nms_thr (float): IoU threshold for bounding box NMS. + Defaults to 0.3. + + Yields: + Any: Data processed by the ``pipeline`` and ``collate_fn``. + """ + + if isinstance(input, str): + data_info = dict(img_path=input) + else: + data_info = dict(img=input, img_path=f'{index}.jpg'.rjust(10, '0')) + data_info.update(self.model.dataset_meta) + + if self.cfg.data_mode == 'topdown': + bboxes = [] + if self.detector is not None: + try: + det_results = self.detector( + input, return_datasamples=True)['predictions'] + except ValueError: + print_log( + 'Support for mmpose and mmdet versions up to 3.1.0 ' + 'will be discontinued in upcoming releases. To ' + 'ensure ongoing compatibility, please upgrade to ' + 'mmdet version 3.2.0 or later.', + logger='current', + level=logging.WARNING) + det_results = self.detector( + input, return_datasample=True)['predictions'] + pred_instance = det_results[0].pred_instances.cpu().numpy() + bboxes = np.concatenate( + (pred_instance.bboxes, pred_instance.scores[:, None]), + axis=1) + + label_mask = np.zeros(len(bboxes), dtype=np.uint8) + for cat_id in self.det_cat_ids: + label_mask = np.logical_or(label_mask, + pred_instance.labels == cat_id) + + bboxes = bboxes[np.logical_and( + label_mask, pred_instance.scores > bbox_thr)] + bboxes = bboxes[nms(bboxes, nms_thr)] + + data_infos = [] + if len(bboxes) > 0: + for bbox in bboxes: + inst = data_info.copy() + inst['bbox'] = bbox[None, :4] + inst['bbox_score'] = bbox[4:5] + data_infos.append(self.pipeline(inst)) + else: + inst = data_info.copy() + + # get bbox from the image size + if isinstance(input, str): + input = mmcv.imread(input) + h, w = input.shape[:2] + + inst['bbox'] = np.array([[0, 0, w, h]], dtype=np.float32) + inst['bbox_score'] = np.ones(1, dtype=np.float32) + data_infos.append(self.pipeline(inst)) + + else: # bottom-up + data_infos = [self.pipeline(data_info)] + + return data_infos + + @torch.no_grad() + def forward(self, + inputs: Union[dict, tuple], + merge_results: bool = True, + bbox_thr: float = -1, + pose_based_nms: bool = False): + """Performs a forward pass through the model. + + Args: + inputs (Union[dict, tuple]): The input data to be processed. Can + be either a dictionary or a tuple. + merge_results (bool, optional): Whether to merge data samples, + default to True. This is only applicable when the data_mode + is 'topdown'. + bbox_thr (float, optional): A threshold for the bounding box + scores. Bounding boxes with scores greater than this value + will be retained. Default value is -1 which retains all + bounding boxes. + + Returns: + A list of data samples with prediction instances. + """ + data_samples = self.model.test_step(inputs) + if self.cfg.data_mode == 'topdown' and merge_results: + data_samples = [merge_data_samples(data_samples)] + + if bbox_thr > 0: + for ds in data_samples: + if 'bbox_scores' in ds.pred_instances: + ds.pred_instances = ds.pred_instances[ + ds.pred_instances.bbox_scores > bbox_thr] + + if pose_based_nms: + for ds in data_samples: + if len(ds.pred_instances) == 0: + continue + + kpts = ds.pred_instances.keypoints + scores = ds.pred_instances.bbox_scores + num_keypoints = kpts.shape[-2] + + kept_indices = nearby_joints_nms( + [ + dict(keypoints=kpts[i], score=scores[i]) + for i in range(len(kpts)) + ], + num_nearby_joints_thr=num_keypoints // 3, + ) + ds.pred_instances = ds.pred_instances[kept_indices] + + return data_samples diff --git a/mmpose/apis/inferencers/pose3d_inferencer.py b/mmpose/apis/inferencers/pose3d_inferencer.py new file mode 100644 index 0000000000000000000000000000000000000000..f372438298c8ac8c4a6aaa9e171b9c799a9450b1 --- /dev/null +++ b/mmpose/apis/inferencers/pose3d_inferencer.py @@ -0,0 +1,457 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import os +from collections import defaultdict +from functools import partial +from typing import Callable, Dict, List, Optional, Sequence, Tuple, Union + +import mmcv +import numpy as np +import torch +from mmengine.config import Config, ConfigDict +from mmengine.infer.infer import ModelType +from mmengine.model import revert_sync_batchnorm +from mmengine.registry import init_default_scope +from mmengine.structures import InstanceData + +from mmpose.apis import (_track_by_iou, _track_by_oks, collate_pose_sequence, + convert_keypoint_definition, extract_pose_sequence) +from mmpose.registry import INFERENCERS +from mmpose.structures import PoseDataSample, merge_data_samples +from .base_mmpose_inferencer import BaseMMPoseInferencer +from .pose2d_inferencer import Pose2DInferencer + +InstanceList = List[InstanceData] +InputType = Union[str, np.ndarray] +InputsType = Union[InputType, Sequence[InputType]] +PredType = Union[InstanceData, InstanceList] +ImgType = Union[np.ndarray, Sequence[np.ndarray]] +ConfigType = Union[Config, ConfigDict] +ResType = Union[Dict, List[Dict], InstanceData, List[InstanceData]] + + +@INFERENCERS.register_module(name='pose-estimation-3d') +@INFERENCERS.register_module() +class Pose3DInferencer(BaseMMPoseInferencer): + """The inferencer for 3D pose estimation. + + Args: + model (str, optional): Pretrained 2D pose estimation algorithm. + It's the path to the config file or the model name defined in + metafile. For example, it could be: + + - model alias, e.g. ``'body'``, + - config name, e.g. ``'simcc_res50_8xb64-210e_coco-256x192'``, + - config path + + Defaults to ``None``. + weights (str, optional): Path to the checkpoint. If it is not + specified and "model" is a model name of metafile, the weights + will be loaded from metafile. Defaults to None. + device (str, optional): Device to run inference. If None, the + available device will be automatically used. Defaults to None. + scope (str, optional): The scope of the model. Defaults to "mmpose". + det_model (str, optional): Config path or alias of detection model. + Defaults to None. + det_weights (str, optional): Path to the checkpoints of detection + model. Defaults to None. + det_cat_ids (int or list[int], optional): Category id for + detection model. Defaults to None. + output_heatmaps (bool, optional): Flag to visualize predicted + heatmaps. If set to None, the default setting from the model + config will be used. Default is None. + """ + + preprocess_kwargs: set = { + 'bbox_thr', 'nms_thr', 'bboxes', 'use_oks_tracking', 'tracking_thr', + 'disable_norm_pose_2d' + } + forward_kwargs: set = {'disable_rebase_keypoint'} + visualize_kwargs: set = { + 'return_vis', + 'show', + 'wait_time', + 'draw_bbox', + 'radius', + 'thickness', + 'num_instances', + 'kpt_thr', + 'vis_out_dir', + } + postprocess_kwargs: set = {'pred_out_dir', 'return_datasample'} + + def __init__(self, + model: Union[ModelType, str], + weights: Optional[str] = None, + pose2d_model: Optional[Union[ModelType, str]] = None, + pose2d_weights: Optional[str] = None, + device: Optional[str] = None, + scope: Optional[str] = 'mmpose', + det_model: Optional[Union[ModelType, str]] = None, + det_weights: Optional[str] = None, + det_cat_ids: Optional[Union[int, Tuple]] = None, + show_progress: bool = False) -> None: + + init_default_scope(scope) + super().__init__( + model=model, + weights=weights, + device=device, + scope=scope, + show_progress=show_progress) + self.model = revert_sync_batchnorm(self.model) + + # assign dataset metainfo to self.visualizer + self.visualizer.set_dataset_meta(self.model.dataset_meta) + + # initialize 2d pose estimator + self.pose2d_model = Pose2DInferencer( + pose2d_model if pose2d_model else 'human', pose2d_weights, device, + scope, det_model, det_weights, det_cat_ids) + + # helper functions + self._keypoint_converter = partial( + convert_keypoint_definition, + pose_det_dataset=self.pose2d_model.model. + dataset_meta['dataset_name'], + pose_lift_dataset=self.model.dataset_meta['dataset_name'], + ) + + self._pose_seq_extractor = partial( + extract_pose_sequence, + causal=self.cfg.test_dataloader.dataset.get('causal', False), + seq_len=self.cfg.test_dataloader.dataset.get('seq_len', 1), + step=self.cfg.test_dataloader.dataset.get('seq_step', 1)) + + self._video_input = False + self._buffer = defaultdict(list) + + def preprocess_single(self, + input: InputType, + index: int, + bbox_thr: float = 0.3, + nms_thr: float = 0.3, + bboxes: Union[List[List], List[np.ndarray], + np.ndarray] = [], + use_oks_tracking: bool = False, + tracking_thr: float = 0.3, + disable_norm_pose_2d: bool = False): + """Process a single input into a model-feedable format. + + Args: + input (InputType): The input provided by the user. + index (int): The index of the input. + bbox_thr (float, optional): The threshold for bounding box + detection. Defaults to 0.3. + nms_thr (float, optional): The Intersection over Union (IoU) + threshold for bounding box Non-Maximum Suppression (NMS). + Defaults to 0.3. + bboxes (Union[List[List], List[np.ndarray], np.ndarray]): + The bounding boxes to use. Defaults to []. + use_oks_tracking (bool, optional): A flag that indicates + whether OKS-based tracking should be used. Defaults to False. + tracking_thr (float, optional): The threshold for tracking. + Defaults to 0.3. + disable_norm_pose_2d (bool, optional): A flag that indicates + whether 2D pose normalization should be used. + Defaults to False. + + Yields: + Any: The data processed by the pipeline and collate_fn. + + This method first calculates 2D keypoints using the provided + pose2d_model. The method also performs instance matching, which + can use either OKS-based tracking or IOU-based tracking. + """ + + # calculate 2d keypoints + results_pose2d = next( + self.pose2d_model( + input, + bbox_thr=bbox_thr, + nms_thr=nms_thr, + bboxes=bboxes, + merge_results=False, + return_datasamples=True))['predictions'] + + for ds in results_pose2d: + ds.pred_instances.set_field( + (ds.pred_instances.bboxes[..., 2:] - + ds.pred_instances.bboxes[..., :2]).prod(-1), 'areas') + + if not self._video_input: + height, width = results_pose2d[0].metainfo['ori_shape'] + + # Clear the buffer if inputs are individual images to prevent + # carryover effects from previous images + self._buffer.clear() + + else: + height = self.video_info['height'] + width = self.video_info['width'] + img_path = results_pose2d[0].metainfo['img_path'] + + # instance matching + if use_oks_tracking: + _track = partial(_track_by_oks) + else: + _track = _track_by_iou + + for result in results_pose2d: + track_id, self._buffer['results_pose2d_last'], _ = _track( + result, self._buffer['results_pose2d_last'], tracking_thr) + if track_id == -1: + pred_instances = result.pred_instances.cpu().numpy() + keypoints = pred_instances.keypoints + if np.count_nonzero(keypoints[:, :, 1]) >= 3: + next_id = self._buffer.get('next_id', 0) + result.set_field(next_id, 'track_id') + self._buffer['next_id'] = next_id + 1 + else: + # If the number of keypoints detected is small, + # delete that person instance. + result.pred_instances.keypoints[..., 1] = -10 + result.pred_instances.bboxes *= 0 + result.set_field(-1, 'track_id') + else: + result.set_field(track_id, 'track_id') + self._buffer['pose2d_results'] = merge_data_samples(results_pose2d) + + # convert keypoints + results_pose2d_converted = [ds.cpu().numpy() for ds in results_pose2d] + for ds in results_pose2d_converted: + ds.pred_instances.keypoints = self._keypoint_converter( + ds.pred_instances.keypoints) + self._buffer['pose_est_results_list'].append(results_pose2d_converted) + + # extract and pad input pose2d sequence + pose_results_2d = self._pose_seq_extractor( + self._buffer['pose_est_results_list'], + frame_idx=index if self._video_input else 0) + causal = self.cfg.test_dataloader.dataset.get('causal', False) + target_idx = -1 if causal else len(pose_results_2d) // 2 + + stats_info = self.model.dataset_meta.get('stats_info', {}) + bbox_center = stats_info.get('bbox_center', None) + bbox_scale = stats_info.get('bbox_scale', None) + + pose_results_2d_copy = [] + for pose_res in pose_results_2d: + pose_res_copy = [] + for data_sample in pose_res: + + data_sample_copy = PoseDataSample() + data_sample_copy.gt_instances = \ + data_sample.gt_instances.clone() + data_sample_copy.pred_instances = \ + data_sample.pred_instances.clone() + data_sample_copy.track_id = data_sample.track_id + + kpts = data_sample.pred_instances.keypoints + bboxes = data_sample.pred_instances.bboxes + keypoints = [] + for k in range(len(kpts)): + kpt = kpts[k] + if not disable_norm_pose_2d: + bbox = bboxes[k] + center = np.array([[(bbox[0] + bbox[2]) / 2, + (bbox[1] + bbox[3]) / 2]]) + scale = max(bbox[2] - bbox[0], bbox[3] - bbox[1]) + keypoints.append((kpt[:, :2] - center) / scale * + bbox_scale + bbox_center) + else: + keypoints.append(kpt[:, :2]) + data_sample_copy.pred_instances.set_field( + np.array(keypoints), 'keypoints') + pose_res_copy.append(data_sample_copy) + + pose_results_2d_copy.append(pose_res_copy) + pose_sequences_2d = collate_pose_sequence(pose_results_2d_copy, True, + target_idx) + if not pose_sequences_2d: + return [] + + data_list = [] + for i, pose_seq in enumerate(pose_sequences_2d): + data_info = dict() + + keypoints_2d = pose_seq.pred_instances.keypoints + keypoints_2d = np.squeeze( + keypoints_2d, + axis=0) if keypoints_2d.ndim == 4 else keypoints_2d + + T, K, C = keypoints_2d.shape + + data_info['keypoints'] = keypoints_2d + data_info['keypoints_visible'] = np.ones(( + T, + K, + ), + dtype=np.float32) + data_info['lifting_target'] = np.zeros((1, K, 3), dtype=np.float32) + data_info['factor'] = np.zeros((T, ), dtype=np.float32) + data_info['lifting_target_visible'] = np.ones((1, K, 1), + dtype=np.float32) + data_info['camera_param'] = dict(w=width, h=height) + + data_info.update(self.model.dataset_meta) + data_info = self.pipeline(data_info) + data_info['data_samples'].set_field( + img_path, 'img_path', field_type='metainfo') + data_list.append(data_info) + + return data_list + + @torch.no_grad() + def forward(self, + inputs: Union[dict, tuple], + disable_rebase_keypoint: bool = False): + """Perform forward pass through the model and process the results. + + Args: + inputs (Union[dict, tuple]): The inputs for the model. + disable_rebase_keypoint (bool, optional): Flag to disable rebasing + the height of the keypoints. Defaults to False. + + Returns: + list: A list of data samples, each containing the model's output + results. + """ + pose_lift_results = self.model.test_step(inputs) + + # Post-processing of pose estimation results + pose_est_results_converted = self._buffer['pose_est_results_list'][-1] + for idx, pose_lift_res in enumerate(pose_lift_results): + # Update track_id from the pose estimation results + pose_lift_res.track_id = pose_est_results_converted[idx].get( + 'track_id', 1e4) + + # align the shape of output keypoints coordinates and scores + keypoints = pose_lift_res.pred_instances.keypoints + keypoint_scores = pose_lift_res.pred_instances.keypoint_scores + if keypoint_scores.ndim == 3: + pose_lift_results[idx].pred_instances.keypoint_scores = \ + np.squeeze(keypoint_scores, axis=1) + if keypoints.ndim == 4: + keypoints = np.squeeze(keypoints, axis=1) + + # Invert x and z values of the keypoints + keypoints = keypoints[..., [0, 2, 1]] + keypoints[..., 0] = -keypoints[..., 0] + keypoints[..., 2] = -keypoints[..., 2] + + # If rebase_keypoint_height is True, adjust z-axis values + if not disable_rebase_keypoint: + keypoints[..., 2] -= np.min( + keypoints[..., 2], axis=-1, keepdims=True) + + pose_lift_results[idx].pred_instances.keypoints = keypoints + + pose_lift_results = sorted( + pose_lift_results, key=lambda x: x.get('track_id', 1e4)) + + data_samples = [merge_data_samples(pose_lift_results)] + return data_samples + + def visualize(self, + inputs: list, + preds: List[PoseDataSample], + return_vis: bool = False, + show: bool = False, + draw_bbox: bool = False, + wait_time: float = 0, + radius: int = 3, + thickness: int = 1, + kpt_thr: float = 0.3, + num_instances: int = 1, + vis_out_dir: str = '', + window_name: str = '', + window_close_event_handler: Optional[Callable] = None + ) -> List[np.ndarray]: + """Visualize predictions. + + Args: + inputs (list): Inputs preprocessed by :meth:`_inputs_to_list`. + preds (Any): Predictions of the model. + return_vis (bool): Whether to return images with predicted results. + show (bool): Whether to display the image in a popup window. + Defaults to False. + wait_time (float): The interval of show (ms). Defaults to 0 + draw_bbox (bool): Whether to draw the bounding boxes. + Defaults to False + radius (int): Keypoint radius for visualization. Defaults to 3 + thickness (int): Link thickness for visualization. Defaults to 1 + kpt_thr (float): The threshold to visualize the keypoints. + Defaults to 0.3 + vis_out_dir (str, optional): Directory to save visualization + results w/o predictions. If left as empty, no file will + be saved. Defaults to ''. + window_name (str, optional): Title of display window. + window_close_event_handler (callable, optional): + + Returns: + List[np.ndarray]: Visualization results. + """ + if (not return_vis) and (not show) and (not vis_out_dir): + return + + if getattr(self, 'visualizer', None) is None: + raise ValueError('Visualization needs the "visualizer" term' + 'defined in the config, but got None.') + + self.visualizer.radius = radius + self.visualizer.line_width = thickness + det_kpt_color = self.pose2d_model.visualizer.kpt_color + det_dataset_skeleton = self.pose2d_model.visualizer.skeleton + det_dataset_link_color = self.pose2d_model.visualizer.link_color + self.visualizer.det_kpt_color = det_kpt_color + self.visualizer.det_dataset_skeleton = det_dataset_skeleton + self.visualizer.det_dataset_link_color = det_dataset_link_color + + results = [] + + for single_input, pred in zip(inputs, preds): + if isinstance(single_input, str): + img = mmcv.imread(single_input, channel_order='rgb') + elif isinstance(single_input, np.ndarray): + img = mmcv.bgr2rgb(single_input) + else: + raise ValueError('Unsupported input type: ' + f'{type(single_input)}') + + # since visualization and inference utilize the same process, + # the wait time is reduced when a video input is utilized, + # thereby eliminating the issue of inference getting stuck. + wait_time = 1e-5 if self._video_input else wait_time + + if num_instances < 0: + num_instances = len(pred.pred_instances) + + visualization = self.visualizer.add_datasample( + window_name, + img, + data_sample=pred, + det_data_sample=self._buffer['pose2d_results'], + draw_gt=False, + draw_bbox=draw_bbox, + show=show, + wait_time=wait_time, + dataset_2d=self.pose2d_model.model. + dataset_meta['dataset_name'], + dataset_3d=self.model.dataset_meta['dataset_name'], + kpt_thr=kpt_thr, + num_instances=num_instances) + results.append(visualization) + + if vis_out_dir: + img_name = os.path.basename(pred.metainfo['img_path']) \ + if 'img_path' in pred.metainfo else None + self.save_visualization( + visualization, + vis_out_dir, + img_name=img_name, + ) + + if return_vis: + return results + else: + return [] diff --git a/mmpose/apis/inferencers/utils/__init__.py b/mmpose/apis/inferencers/utils/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..5cc40535b0d42a3b2ff41e97e26dcc30c440622b --- /dev/null +++ b/mmpose/apis/inferencers/utils/__init__.py @@ -0,0 +1,5 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .default_det_models import default_det_models +from .get_model_alias import get_model_aliases + +__all__ = ['default_det_models', 'get_model_aliases'] diff --git a/mmpose/apis/inferencers/utils/default_det_models.py b/mmpose/apis/inferencers/utils/default_det_models.py new file mode 100644 index 0000000000000000000000000000000000000000..a2deca961b00c75fe05d09b30b05394c175acf5b --- /dev/null +++ b/mmpose/apis/inferencers/utils/default_det_models.py @@ -0,0 +1,36 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import os.path as osp + +from mmengine.config.utils import MODULE2PACKAGE +from mmengine.utils import get_installed_path + +mmpose_path = get_installed_path(MODULE2PACKAGE['mmpose']) + +default_det_models = dict( + human=dict( + model=osp.join( + mmpose_path, '.mim', 'demo/mmdetection_cfg/' + 'rtmdet_m_640-8xb32_coco-person.py'), + weights='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth', + cat_ids=(0, )), + face=dict( + model=osp.join(mmpose_path, '.mim', + 'demo/mmdetection_cfg/yolox-s_8xb8-300e_coco-face.py'), + weights='https://download.openmmlab.com/mmpose/mmdet_pretrained/' + 'yolo-x_8xb8-300e_coco-face_13274d7c.pth', + cat_ids=(0, )), + hand=dict( + model=osp.join(mmpose_path, '.mim', 'demo/mmdetection_cfg/' + 'rtmdet_nano_320-8xb32_hand.py'), + weights='https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/' + 'rtmdet_nano_8xb32-300e_hand-267f9c8f.pth', + cat_ids=(0, )), + animal=dict( + model='rtmdet-m', + weights=None, + cat_ids=(15, 16, 17, 18, 19, 20, 21, 22, 23)), +) + +default_det_models['body'] = default_det_models['human'] +default_det_models['wholebody'] = default_det_models['human'] diff --git a/mmpose/apis/inferencers/utils/get_model_alias.py b/mmpose/apis/inferencers/utils/get_model_alias.py new file mode 100644 index 0000000000000000000000000000000000000000..49de6528d6ea0df58cf7ae987176defbd4953739 --- /dev/null +++ b/mmpose/apis/inferencers/utils/get_model_alias.py @@ -0,0 +1,37 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Dict + +from mmengine.infer import BaseInferencer + + +def get_model_aliases(scope: str = 'mmpose') -> Dict[str, str]: + """Retrieve model aliases and their corresponding configuration names. + + Args: + scope (str, optional): The scope for the model aliases. Defaults + to 'mmpose'. + + Returns: + Dict[str, str]: A dictionary containing model aliases as keys and + their corresponding configuration names as values. + """ + + # Get a list of model configurations from the metafile + repo_or_mim_dir = BaseInferencer._get_repo_or_mim_dir(scope) + model_cfgs = BaseInferencer._get_models_from_metafile(repo_or_mim_dir) + + model_alias_dict = dict() + for model_cfg in model_cfgs: + if 'Alias' in model_cfg: + if isinstance(model_cfg['Alias'], str): + model_alias_dict[model_cfg['Alias']] = model_cfg['Name'] + elif isinstance(model_cfg['Alias'], list): + for alias in model_cfg['Alias']: + model_alias_dict[alias] = model_cfg['Name'] + else: + raise ValueError( + 'encounter an unexpected alias type. Please raise an ' + 'issue at https://github.com/open-mmlab/mmpose/issues ' + 'to announce us') + + return model_alias_dict diff --git a/mmpose/apis/visualization.py b/mmpose/apis/visualization.py new file mode 100644 index 0000000000000000000000000000000000000000..3ba96401d21d53881c9d3eefa8bd31b2d60d1dbe --- /dev/null +++ b/mmpose/apis/visualization.py @@ -0,0 +1,82 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from copy import deepcopy +from typing import Union + +import mmcv +import numpy as np +from mmengine.structures import InstanceData + +from mmpose.datasets.datasets.utils import parse_pose_metainfo +from mmpose.structures import PoseDataSample +from mmpose.visualization import PoseLocalVisualizer + + +def visualize( + img: Union[np.ndarray, str], + keypoints: np.ndarray, + keypoint_score: np.ndarray = None, + metainfo: Union[str, dict] = None, + visualizer: PoseLocalVisualizer = None, + show_kpt_idx: bool = False, + skeleton_style: str = 'mmpose', + show: bool = False, + kpt_thr: float = 0.3, +): + """Visualize 2d keypoints on an image. + + Args: + img (str | np.ndarray): The image to be displayed. + keypoints (np.ndarray): The keypoint to be displayed. + keypoint_score (np.ndarray): The score of each keypoint. + metainfo (str | dict): The metainfo of dataset. + visualizer (PoseLocalVisualizer): The visualizer. + show_kpt_idx (bool): Whether to show the index of keypoints. + skeleton_style (str): Skeleton style. Options are 'mmpose' and + 'openpose'. + show (bool): Whether to show the image. + wait_time (int): Value of waitKey param. + kpt_thr (float): Keypoint threshold. + """ + assert skeleton_style in [ + 'mmpose', 'openpose' + ], (f'Only support skeleton style in {["mmpose", "openpose"]}, ') + + if visualizer is None: + visualizer = PoseLocalVisualizer() + else: + visualizer = deepcopy(visualizer) + + if isinstance(metainfo, str): + metainfo = parse_pose_metainfo(dict(from_file=metainfo)) + elif isinstance(metainfo, dict): + metainfo = parse_pose_metainfo(metainfo) + + if metainfo is not None: + visualizer.set_dataset_meta(metainfo, skeleton_style=skeleton_style) + + if isinstance(img, str): + img = mmcv.imread(img, channel_order='rgb') + elif isinstance(img, np.ndarray): + img = mmcv.bgr2rgb(img) + + if keypoint_score is None: + keypoint_score = np.ones(keypoints.shape[0]) + + tmp_instances = InstanceData() + tmp_instances.keypoints = keypoints + tmp_instances.keypoint_score = keypoint_score + + tmp_datasample = PoseDataSample() + tmp_datasample.pred_instances = tmp_instances + + visualizer.add_datasample( + 'visualization', + img, + tmp_datasample, + show_kpt_idx=show_kpt_idx, + skeleton_style=skeleton_style, + show=show, + wait_time=0, + kpt_thr=kpt_thr) + + return visualizer.get_image() diff --git a/mmpose/codecs/__init__.py b/mmpose/codecs/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..0653865ab6f07d24c610d0f345bb51d914f7e8f6 --- /dev/null +++ b/mmpose/codecs/__init__.py @@ -0,0 +1,29 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .annotation_processors import YOLOXPoseAnnotationProcessor +from .associative_embedding import AssociativeEmbedding +from .decoupled_heatmap import DecoupledHeatmap +from .edpose_label import EDPoseLabel +from .hand_3d_heatmap import Hand3DHeatmap +from .image_pose_lifting import ImagePoseLifting +from .integral_regression_label import IntegralRegressionLabel +from .megvii_heatmap import MegviiHeatmap +from .motionbert_label import MotionBERTLabel +from .msra_heatmap import MSRAHeatmap +from .regression_label import RegressionLabel +from .simcc_label import SimCCLabel +from .spr import SPR +from .udp_heatmap import UDPHeatmap +from .video_pose_lifting import VideoPoseLifting +from .double_probmap import DoubleProbMap +from .probmap import ProbMap +from .udp_expmax_heatmap import UDPExpMaxHeatmap +from .argmax_probmap import ArgMaxProbMap + +__all__ = [ + 'MSRAHeatmap', 'MegviiHeatmap', 'UDPHeatmap', 'RegressionLabel', + 'SimCCLabel', 'IntegralRegressionLabel', 'AssociativeEmbedding', 'SPR', + 'DecoupledHeatmap', 'VideoPoseLifting', 'ImagePoseLifting', + 'MotionBERTLabel', 'YOLOXPoseAnnotationProcessor', 'EDPoseLabel', + 'Hand3DHeatmap', 'DoubleProbMap', 'ProbMap', 'UDPExpMaxHeatmap', + 'ArgMaxProbMap' +] diff --git a/mmpose/codecs/annotation_processors.py b/mmpose/codecs/annotation_processors.py new file mode 100644 index 0000000000000000000000000000000000000000..b16a4e67cab562adb61a7ccfde07ccf7f53d19a6 --- /dev/null +++ b/mmpose/codecs/annotation_processors.py @@ -0,0 +1,100 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Dict, List, Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec + +INF = 1e6 +NEG_INF = -1e6 + + +class BaseAnnotationProcessor(BaseKeypointCodec): + """Base class for annotation processors.""" + + def decode(self, *args, **kwargs): + pass + + +@KEYPOINT_CODECS.register_module() +class YOLOXPoseAnnotationProcessor(BaseAnnotationProcessor): + """Convert dataset annotations to the input format of YOLOX-Pose. + + This processor expands bounding boxes and converts category IDs to labels. + + Args: + expand_bbox (bool, optional): Whether to expand the bounding box + to include all keypoints. Defaults to False. + input_size (tuple, optional): The size of the input image for the + model, formatted as (h, w). This argument is necessary for the + codec in deployment but is not used indeed. + """ + + auxiliary_encode_keys = {'category_id', 'bbox'} + label_mapping_table = dict( + bbox='bboxes', + bbox_labels='labels', + keypoints='keypoints', + keypoints_visible='keypoints_visible', + area='areas', + ) + instance_mapping_table = dict( + bbox='bboxes', + bbox_score='bbox_scores', + keypoints='keypoints', + keypoints_visible='keypoints_visible', + # remove 'bbox_scales' in default instance_mapping_table to avoid + # length mismatch during training with multiple datasets + ) + + def __init__(self, + expand_bbox: bool = False, + input_size: Optional[Tuple] = None): + super().__init__() + self.expand_bbox = expand_bbox + + def encode(self, + keypoints: Optional[np.ndarray] = None, + keypoints_visible: Optional[np.ndarray] = None, + bbox: Optional[np.ndarray] = None, + category_id: Optional[List[int]] = None + ) -> Dict[str, np.ndarray]: + """Encode keypoints, bounding boxes, and category IDs. + + Args: + keypoints (np.ndarray, optional): Keypoints array. Defaults + to None. + keypoints_visible (np.ndarray, optional): Visibility array for + keypoints. Defaults to None. + bbox (np.ndarray, optional): Bounding box array. Defaults to None. + category_id (List[int], optional): List of category IDs. Defaults + to None. + + Returns: + Dict[str, np.ndarray]: Encoded annotations. + """ + results = {} + + if self.expand_bbox and bbox is not None: + # Handle keypoints visibility + if keypoints_visible.ndim == 3: + keypoints_visible = keypoints_visible[..., 0] + + # Expand bounding box to include keypoints + kpts_min = keypoints.copy() + kpts_min[keypoints_visible == 0] = INF + bbox[..., :2] = np.minimum(bbox[..., :2], kpts_min.min(axis=1)) + + kpts_max = keypoints.copy() + kpts_max[keypoints_visible == 0] = NEG_INF + bbox[..., 2:] = np.maximum(bbox[..., 2:], kpts_max.max(axis=1)) + + results['bbox'] = bbox + + if category_id is not None: + # Convert category IDs to labels + bbox_labels = np.array(category_id).astype(np.int8) - 1 + results['bbox_labels'] = bbox_labels + + return results diff --git a/mmpose/codecs/argmax_probmap.py b/mmpose/codecs/argmax_probmap.py new file mode 100644 index 0000000000000000000000000000000000000000..4d3da2e44eb97f8654c920d0215e0ccb69a1589f --- /dev/null +++ b/mmpose/codecs/argmax_probmap.py @@ -0,0 +1,319 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import cv2 +import numpy as np +import os + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_offset_heatmap, generate_udp_gaussian_heatmaps, + get_heatmap_maximum, refine_keypoints_dark_udp, generate_probmaps, get_heatmap_expected_value, gaussian_blur) + + +@KEYPOINT_CODECS.register_module() +class ArgMaxProbMap(BaseKeypointCodec): + r"""Generate per-pixel expected OKS heatmaps for keypoint detection with ArgMax decoding. + See the paper: `ProbPose: A Probabilistic Approach to 2D Human Pose Estimation` + by Purkrabek et al. (2025) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmap (np.ndarray): The generated OKS heatmap in shape (K, H, W) + where [W, H] is the `heatmap_size`, and K is the number of keypoints. + Each pixel value represents the expected OKS score if that pixel is + predicted as the keypoint location, given the ground truth location. + The heatmap is decoded using ArgMax operation during inference. + - keypoint_weights (np.ndarray): The target weights in shape (K,) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + heatmap_type (str): The heatmap type to encode the keypoints. Options + are: + + - ``'gaussian'``: Gaussian heatmap + - ``'combined'``: Combination of a binary label map and offset + maps for X and Y axes. + + sigma (float): The sigma value of the Gaussian heatmap when + ``heatmap_type=='gaussian'``. Defaults to 2.0 + radius_factor (float): The radius factor of the binary label + map when ``heatmap_type=='combined'``. The positive region is + defined as the neighbor of the keypoint with the radius + :math:`r=radius_factor*max(W, H)`. Defaults to 0.0546875 + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. Defaults to 11 + + .. _`ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`: + https://arxiv.org/abs/2412.02254 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + heatmap_type: str = 'gaussian', + sigma: float = -1, + radius_factor: float = 0.0546875, + blur_kernel_size: int = 11, + increase_sigma_with_padding=False, + ) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.radius_factor = radius_factor + self.heatmap_type = heatmap_type + self.blur_kernel_size = blur_kernel_size + self.scale_factor = ((np.array(input_size) - 1) / + (np.array(heatmap_size) - 1)).astype(np.float32) + self.increase_sigma_with_padding = increase_sigma_with_padding + self.sigma = sigma + + if self.heatmap_type not in {'gaussian', 'combined'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + id_similarity: Optional[float] = 0.0, + keypoints_visibility: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + id_similarity (float): The usefulness of the identity information + for the whole pose. Defaults to 0.0 + keypoints_visibility (np.ndarray): The visibility bit for each + keypoint (N, K). Defaults to None + + Returns: + dict: + - heatmap (np.ndarray): The generated heatmap in shape + (C_out, H, W) where [W, H] is the `heatmap_size`, and the + C_out is the output channel number which depends on the + `heatmap_type`. If `heatmap_type=='gaussian'`, C_out equals to + keypoint number K; if `heatmap_type=='combined'`, C_out + equals to K*3 (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visibility is None: + keypoints_visibility = np.zeros(keypoints.shape[:2], dtype=np.float32) + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + + heatmaps, keypoint_weights = generate_probmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + keypoints_visibility=keypoints_visibility, + sigma=self.sigma, + increase_sigma_with_padding=self.increase_sigma_with_padding) + + annotated = keypoints_visible > 0 + + in_image = np.logical_and( + keypoints[:, :, 0] >= 0, + keypoints[:, :, 0] < self.input_size[0], + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] >= 0, + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] < self.input_size[1], + ) + + encoded = dict( + heatmaps=heatmaps, + keypoint_weights=keypoint_weights, + annotated=annotated, + in_image=in_image, + keypoints_scaled=keypoints, + identification_similarity=id_similarity, + ) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = encoded.copy() + W, H = self.heatmap_size + + if self.heatmap_type == 'gaussian': + + keypoints_max, scores = get_heatmap_maximum(heatmaps) + # unsqueeze the instance dimension for single-instance results + keypoints_max = keypoints_max[None] + scores = scores[None] + + keypoints = refine_keypoints_dark_udp( + keypoints_max.copy(), heatmaps, blur_kernel_size=self.blur_kernel_size) + + # This piece of code is used to draw the comparison between the + # UDP end expected-OKS decoding in the paper. It is not used in the + # final implementation, hence draw_comparison is set to False. + draw_comparison = False + if draw_comparison: + + keypoints_exp, _, oks_maps = get_heatmap_expected_value(encoded.copy(), return_heatmap=True) + keypoints_exp = keypoints_exp.reshape(keypoints.shape) + + dist = np.linalg.norm(keypoints - keypoints_exp, axis=-1) + + for k in range(keypoints.shape[1]): + # continue + d = dist[0, k] + + # 1/4 of heatmap pixel is 1 pixel in image space + if 0.5 < d: + + # Skip 80% of the heatmaps to save time and space + if np.random.rand() < 0.8: + continue + + # size = np.array([W, H]) + size = self.input_size + + # Draw heatmaps with estimated values + htm = encoded.copy()[k, :, :] + # kpt_max, _ = get_heatmap_maximum(htm.reshape(1, H, W).copy()) + # kpt_max = np.array(kpt_max).reshape(2) + htm = cv2.resize(htm, (size[0], size[1])) + htm = cv2.cvtColor(htm, cv2.COLOR_GRAY2BGR) + htm /= htm.max() + htm = cv2.applyColorMap((htm * 255).astype(np.uint8), cv2.COLORMAP_JET) + htm_exp = htm.copy() + htm_max = htm.copy() + kpt = keypoints[0, k, :] + kpt_max = keypoints_max[0, k, :] + kpt_exp = keypoints_exp[0, k, :] + + kpt = (kpt / [W - 1, H - 1] * size).flatten() + kpt_exp = (kpt_exp / [W - 1, H - 1] * size).flatten() + kpt_max = (kpt_max / [W - 1, H - 1] * size).flatten() + + # kpt[0] = np.clip(kpt[0], 0, size[0] - 1) + # kpt[1] = np.clip(kpt[1], 0, size[1] - 1) + # kpt_exp[0] = np.clip(kpt_exp[0], 0, size[0] - 1) + # kpt_exp[1] = np.clip(kpt_exp[1], 0, size[1] - 1) + # kpt_max[0] = np.clip(kpt_max[0], 0, size[0] - 1) + # kpt_max[1] = np.clip(kpt_max[1], 0, size[1] - 1) + + kpt = kpt.astype(int) + kpt_exp = kpt_exp.astype(int) + kpt_max = kpt_max.astype(int) + + htm_raw = htm.copy() + + + htm_center = np.array(size) // 2 + htm = cv2.arrowedLine(htm, htm_center, kpt, (191, 64, 191), thickness=1, tipLength=0.05) + htm_exp = cv2.arrowedLine(htm_exp, htm_center, kpt_exp, (191, 64, 191), thickness=1, tipLength=0.05) + htm_max = cv2.arrowedLine(htm_max, htm_center, kpt_max, (191, 64, 191), thickness=1, tipLength=0.05) + + white_column = np.ones((size[1], 3, 3), dtype=np.uint8) * 150 + save_img = np.hstack((htm_max, white_column, htm, white_column, htm_exp)) + + oksm = oks_maps[k, :, :] + oksm = cv2.resize(oksm, (size[0], size[1])) + oksm /= oksm.max() + oksm = cv2.cvtColor(oksm, cv2.COLOR_GRAY2BGR) + oksm = cv2.applyColorMap((oksm * 255).astype(np.uint8), cv2.COLORMAP_JET) + + + raw_htm = encoded[k, :, :].copy().reshape(1, H, W) + blur_htm = gaussian_blur(raw_htm.copy(), self.blur_kernel_size).squeeze() + blur_htm = cv2.resize(blur_htm, (size[0], size[1])) + blur_htm /= blur_htm.max() + blur_htm = cv2.cvtColor(blur_htm, cv2.COLOR_GRAY2BGR) + blur_htm = cv2.applyColorMap((blur_htm * 255).astype(np.uint8), cv2.COLORMAP_JET) + + raw_htm = cv2.resize(raw_htm.squeeze(), (size[0], size[1])) + raw_htm /= raw_htm.max() + raw_htm = cv2.cvtColor(raw_htm, cv2.COLOR_GRAY2BGR) + raw_htm = cv2.applyColorMap((raw_htm * 255).astype(np.uint8), cv2.COLORMAP_JET) + + oksm_merge = oksm.copy() + oksm_merge = cv2.drawMarker(oksm_merge, kpt_exp, (191, 64, 191), cv2.MARKER_CROSS, 10, 2) + + htm_merge = blur_htm.copy() + htm_merge = cv2.drawMarker(htm_merge, kpt, (255, 159, 207), cv2.MARKER_CROSS, 10, 2) + htm_merge = cv2.drawMarker(htm_merge, kpt_max, (255, 255, 255), cv2.MARKER_CROSS, 10, 2) + + save_heatmaps = np.hstack((raw_htm, white_column, blur_htm, white_column, oksm)) + white_row = np.ones((3, save_img.shape[1], 3), dtype=np.uint8) * 150 + save_img = np.vstack((save_img, white_row, save_heatmaps)) + + os.makedirs('debug', exist_ok=True) + save_path = "debug/{:04.1f}_{:d}_{:06d}.png".format(d, k, abs(hash(str(keypoints[0, k, :])) % (10 ** 6))) + cv2.imwrite(save_path, save_img) + save_path = "debug/{:04.1f}_{:d}_{:06d}_merge.png".format(d, k, abs(hash(str(keypoints[0, k, :])) % (10 ** 6))) + cv2.imwrite(save_path, np.hstack((htm_merge, white_column, oksm_merge))) + save_path = "debug/{:04.1f}_{:d}_{:06d}_blur.png".format(d, k, abs(hash(str(keypoints[0, k, :])) % (10 ** 6))) + cv2.imwrite(save_path, htm_merge) + save_path = "debug/{:04.1f}_{:d}_{:06d}_oks.png".format(d, k, abs(hash(str(keypoints[0, k, :])) % (10 ** 6))) + cv2.imwrite(save_path, oksm_merge) + + elif self.heatmap_type == 'combined': + _K, H, W = heatmaps.shape + K = _K // 3 + + for cls_heatmap in heatmaps[::3]: + # Apply Gaussian blur on classification maps + ks = 2 * self.blur_kernel_size + 1 + cv2.GaussianBlur(cls_heatmap, (ks, ks), 0, cls_heatmap) + + # valid radius + radius = self.radius_factor * max(W, H) + + x_offset = heatmaps[1::3].flatten() * radius + y_offset = heatmaps[2::3].flatten() * radius + keypoints, scores = get_heatmap_maximum(heatmaps=heatmaps[::3]) + index = (keypoints[..., 0] + keypoints[..., 1] * W).flatten() + index += W * H * np.arange(0, K) + index = index.astype(int) + keypoints += np.stack((x_offset[index], y_offset[index]), axis=-1) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None].astype(np.float32) + scores = scores[None] + + keypoints = keypoints / [W - 1, H - 1] * self.input_size + + return keypoints, scores diff --git a/mmpose/codecs/associative_embedding.py b/mmpose/codecs/associative_embedding.py new file mode 100644 index 0000000000000000000000000000000000000000..def9bfd89ed9157ca45b60d5dcd33861e7eac9ec --- /dev/null +++ b/mmpose/codecs/associative_embedding.py @@ -0,0 +1,522 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Any, List, Optional, Tuple + +import numpy as np +import torch +from munkres import Munkres +from torch import Tensor + +from mmpose.registry import KEYPOINT_CODECS +from mmpose.utils.tensor_utils import to_numpy +from .base import BaseKeypointCodec +from .utils import (batch_heatmap_nms, generate_gaussian_heatmaps, + generate_udp_gaussian_heatmaps, refine_keypoints, + refine_keypoints_dark_udp) + + +def _py_max_match(scores): + """Apply munkres algorithm to get the best match. + + Args: + scores(np.ndarray): cost matrix. + + Returns: + np.ndarray: best match. + """ + m = Munkres() + tmp = m.compute(scores) + tmp = np.array(tmp).astype(int) + return tmp + + +def _group_keypoints_by_tags(vals: np.ndarray, + tags: np.ndarray, + locs: np.ndarray, + keypoint_order: List[int], + val_thr: float, + tag_thr: float = 1.0, + max_groups: Optional[int] = None) -> np.ndarray: + """Group the keypoints by tags using Munkres algorithm. + + Note: + + - keypoint number: K + - candidate number: M + - tag dimenssion: L + - coordinate dimension: D + - group number: G + + Args: + vals (np.ndarray): The heatmap response values of keypoints in shape + (K, M) + tags (np.ndarray): The tags of the keypoint candidates in shape + (K, M, L) + locs (np.ndarray): The locations of the keypoint candidates in shape + (K, M, D) + keypoint_order (List[int]): The grouping order of the keypoints. + The groupping usually starts from a keypoints around the head and + torso, and gruadually moves out to the limbs + val_thr (float): The threshold of the keypoint response value + tag_thr (float): The maximum allowed tag distance when matching a + keypoint to a group. A keypoint with larger tag distance to any + of the existing groups will initializes a new group + max_groups (int, optional): The maximum group number. ``None`` means + no limitation. Defaults to ``None`` + + Returns: + np.ndarray: grouped keypoints in shape (G, K, D+1), where the last + dimenssion is the concatenated keypoint coordinates and scores. + """ + + tag_k, loc_k, val_k = tags, locs, vals + K, M, D = locs.shape + assert vals.shape == tags.shape[:2] == (K, M) + assert len(keypoint_order) == K + + default_ = np.zeros((K, 3 + tag_k.shape[2]), dtype=np.float32) + + joint_dict = {} + tag_dict = {} + for i in range(K): + idx = keypoint_order[i] + + tags = tag_k[idx] + joints = np.concatenate((loc_k[idx], val_k[idx, :, None], tags), 1) + mask = joints[:, 2] > val_thr + tags = tags[mask] # shape: [M, L] + joints = joints[mask] # shape: [M, 3 + L], 3: x, y, val + + if joints.shape[0] == 0: + continue + + if i == 0 or len(joint_dict) == 0: + for tag, joint in zip(tags, joints): + key = tag[0] + joint_dict.setdefault(key, np.copy(default_))[idx] = joint + tag_dict[key] = [tag] + else: + # shape: [M] + grouped_keys = list(joint_dict.keys()) + # shape: [M, L] + grouped_tags = [np.mean(tag_dict[i], axis=0) for i in grouped_keys] + + # shape: [M, M, L] + diff = joints[:, None, 3:] - np.array(grouped_tags)[None, :, :] + # shape: [M, M] + diff_normed = np.linalg.norm(diff, ord=2, axis=2) + diff_saved = np.copy(diff_normed) + diff_normed = np.round(diff_normed) * 100 - joints[:, 2:3] + + num_added = diff.shape[0] + num_grouped = diff.shape[1] + + if num_added > num_grouped: + diff_normed = np.concatenate( + (diff_normed, + np.zeros((num_added, num_added - num_grouped), + dtype=np.float32) + 1e10), + axis=1) + + pairs = _py_max_match(diff_normed) + for row, col in pairs: + if (row < num_added and col < num_grouped + and diff_saved[row][col] < tag_thr): + key = grouped_keys[col] + joint_dict[key][idx] = joints[row] + tag_dict[key].append(tags[row]) + else: + key = tags[row][0] + joint_dict.setdefault(key, np.copy(default_))[idx] = \ + joints[row] + tag_dict[key] = [tags[row]] + + joint_dict_keys = list(joint_dict.keys())[:max_groups] + + if joint_dict_keys: + results = np.array([joint_dict[i] + for i in joint_dict_keys]).astype(np.float32) + results = results[..., :D + 1] + else: + results = np.empty((0, K, D + 1), dtype=np.float32) + return results + + +@KEYPOINT_CODECS.register_module() +class AssociativeEmbedding(BaseKeypointCodec): + """Encode/decode keypoints with the method introduced in "Associative + Embedding". This is an asymmetric codec, where the keypoints are + represented as gaussian heatmaps and position indices during encoding, and + restored from predicted heatmaps and group tags. + + See the paper `Associative Embedding: End-to-End Learning for Joint + Detection and Grouping`_ by Newell et al (2017) for details + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - embedding tag dimension: L + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmaps (np.ndarray): The generated heatmap in shape (K, H, W) + where [W, H] is the `heatmap_size` + - keypoint_indices (np.ndarray): The keypoint position indices in shape + (N, K, 2). Each keypoint's index is [i, v], where i is the position + index in the heatmap (:math:`i=y*w+x`) and v is the visibility + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + sigma (float): The sigma value of the Gaussian heatmap + use_udp (bool): Whether use unbiased data processing. See + `UDP (CVPR 2020)`_ for details. Defaults to ``False`` + decode_keypoint_order (List[int]): The grouping order of the + keypoint indices. The groupping usually starts from a keypoints + around the head and torso, and gruadually moves out to the limbs + decode_keypoint_thr (float): The threshold of keypoint response value + in heatmaps. Defaults to 0.1 + decode_tag_thr (float): The maximum allowed tag distance when matching + a keypoint to a group. A keypoint with larger tag distance to any + of the existing groups will initializes a new group. Defaults to + 1.0 + decode_nms_kernel (int): The kernel size of the NMS during decoding, + which should be an odd integer. Defaults to 5 + decode_gaussian_kernel (int): The kernel size of the Gaussian blur + during decoding, which should be an odd integer. It is only used + when ``self.use_udp==True``. Defaults to 3 + decode_topk (int): The number top-k candidates of each keypoints that + will be retrieved from the heatmaps during dedocding. Defaults to + 20 + decode_max_instances (int, optional): The maximum number of instances + to decode. ``None`` means no limitation to the instance number. + Defaults to ``None`` + + .. _`Associative Embedding: End-to-End Learning for Joint Detection and + Grouping`: https://arxiv.org/abs/1611.05424 + .. _`UDP (CVPR 2020)`: https://arxiv.org/abs/1911.07524 + """ + + def __init__( + self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + sigma: Optional[float] = None, + use_udp: bool = False, + decode_keypoint_order: List[int] = [], + decode_nms_kernel: int = 5, + decode_gaussian_kernel: int = 3, + decode_keypoint_thr: float = 0.1, + decode_tag_thr: float = 1.0, + decode_topk: int = 30, + decode_center_shift=0.0, + decode_max_instances: Optional[int] = None, + ) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.use_udp = use_udp + self.decode_nms_kernel = decode_nms_kernel + self.decode_gaussian_kernel = decode_gaussian_kernel + self.decode_keypoint_thr = decode_keypoint_thr + self.decode_tag_thr = decode_tag_thr + self.decode_topk = decode_topk + self.decode_center_shift = decode_center_shift + self.decode_max_instances = decode_max_instances + self.decode_keypoint_order = decode_keypoint_order.copy() + + if self.use_udp: + self.scale_factor = ((np.array(input_size) - 1) / + (np.array(heatmap_size) - 1)).astype( + np.float32) + else: + self.scale_factor = (np.array(input_size) / + heatmap_size).astype(np.float32) + + if sigma is None: + sigma = (heatmap_size[0] * heatmap_size[1])**0.5 / 64 + self.sigma = sigma + + def encode( + self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray, np.ndarray]: + """Encode keypoints into heatmaps and position indices. Note that the + original keypoint coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_indices (np.ndarray): The keypoint position indices + in shape (N, K, 2). Each keypoint's index is [i, v], where i + is the position index in the heatmap (:math:`i=y*w+x`) and v + is the visibility + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + # keypoint coordinates in heatmap + _keypoints = keypoints / self.scale_factor + + if self.use_udp: + heatmaps, keypoint_weights = generate_udp_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=_keypoints, + keypoints_visible=keypoints_visible, + sigma=self.sigma) + else: + heatmaps, keypoint_weights = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=_keypoints, + keypoints_visible=keypoints_visible, + sigma=self.sigma) + + keypoint_indices = self._encode_keypoint_indices( + heatmap_size=self.heatmap_size, + keypoints=_keypoints, + keypoints_visible=keypoints_visible) + + encoded = dict( + heatmaps=heatmaps, + keypoint_indices=keypoint_indices, + keypoint_weights=keypoint_weights) + + return encoded + + def _encode_keypoint_indices(self, heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray) -> np.ndarray: + w, h = heatmap_size + N, K, _ = keypoints.shape + keypoint_indices = np.zeros((N, K, 2), dtype=np.int64) + + for n, k in product(range(N), range(K)): + x, y = (keypoints[n, k] + 0.5).astype(np.int64) + index = y * w + x + vis = (keypoints_visible[n, k] > 0.5 and 0 <= x < w and 0 <= y < h) + keypoint_indices[n, k] = [index, vis] + + return keypoint_indices + + def decode(self, encoded: Any) -> Tuple[np.ndarray, np.ndarray]: + raise NotImplementedError() + + def _get_batch_topk(self, batch_heatmaps: Tensor, batch_tags: Tensor, + k: int): + """Get top-k response values from the heatmaps and corresponding tag + values from the tagging heatmaps. + + Args: + batch_heatmaps (Tensor): Keypoint detection heatmaps in shape + (B, K, H, W) + batch_tags (Tensor): Tagging heatmaps in shape (B, C, H, W), where + the tag dim C is 2*K when using flip testing, or K otherwise + k (int): The number of top responses to get + + Returns: + tuple: + - topk_vals (Tensor): Top-k response values of each heatmap in + shape (B, K, Topk) + - topk_tags (Tensor): The corresponding embedding tags of the + top-k responses, in shape (B, K, Topk, L) + - topk_locs (Tensor): The location of the top-k responses in each + heatmap, in shape (B, K, Topk, 2) where last dimension + represents x and y coordinates + """ + B, K, H, W = batch_heatmaps.shape + L = batch_tags.shape[1] // K + + # shape of topk_val, top_indices: (B, K, TopK) + topk_vals, topk_indices = batch_heatmaps.flatten(-2, -1).topk( + k, dim=-1) + + topk_tags_per_kpts = [ + torch.gather(_tag, dim=2, index=topk_indices) + for _tag in torch.unbind(batch_tags.view(B, L, K, H * W), dim=1) + ] + + topk_tags = torch.stack(topk_tags_per_kpts, dim=-1) # (B, K, TopK, L) + topk_locs = torch.stack([topk_indices % W, topk_indices // W], + dim=-1) # (B, K, TopK, 2) + + return topk_vals, topk_tags, topk_locs + + def _group_keypoints(self, batch_vals: np.ndarray, batch_tags: np.ndarray, + batch_locs: np.ndarray): + """Group keypoints into groups (each represents an instance) by tags. + + Args: + batch_vals (Tensor): Heatmap response values of keypoint + candidates in shape (B, K, Topk) + batch_tags (Tensor): Tags of keypoint candidates in shape + (B, K, Topk, L) + batch_locs (Tensor): Locations of keypoint candidates in shape + (B, K, Topk, 2) + + Returns: + List[np.ndarray]: Grouping results of a batch, each element is a + np.ndarray (in shape [N, K, D+1]) that contains the groups + detected in an image, including both keypoint coordinates and + scores. + """ + + def _group_func(inputs: Tuple): + vals, tags, locs = inputs + return _group_keypoints_by_tags( + vals, + tags, + locs, + keypoint_order=self.decode_keypoint_order, + val_thr=self.decode_keypoint_thr, + tag_thr=self.decode_tag_thr, + max_groups=self.decode_max_instances) + + _results = map(_group_func, zip(batch_vals, batch_tags, batch_locs)) + results = list(_results) + return results + + def _fill_missing_keypoints(self, keypoints: np.ndarray, + keypoint_scores: np.ndarray, + heatmaps: np.ndarray, tags: np.ndarray): + """Fill the missing keypoints in the initial predictions. + + Args: + keypoints (np.ndarray): Keypoint predictions in shape (N, K, D) + keypoint_scores (np.ndarray): Keypint score predictions in shape + (N, K), in which 0 means the corresponding keypoint is + missing in the initial prediction + heatmaps (np.ndarry): Heatmaps in shape (K, H, W) + tags (np.ndarray): Tagging heatmaps in shape (C, H, W) where + C=L*K + + Returns: + tuple: + - keypoints (np.ndarray): Keypoint predictions with missing + ones filled + - keypoint_scores (np.ndarray): Keypoint score predictions with + missing ones filled + """ + + N, K = keypoints.shape[:2] + H, W = heatmaps.shape[1:] + L = tags.shape[0] // K + keypoint_tags = [tags[k::K] for k in range(K)] + + for n in range(N): + # Calculate the instance tag (mean tag of detected keypoints) + _tag = [] + for k in range(K): + if keypoint_scores[n, k] > 0: + x, y = keypoints[n, k, :2].astype(np.int64) + x = np.clip(x, 0, W - 1) + y = np.clip(y, 0, H - 1) + _tag.append(keypoint_tags[k][:, y, x]) + + tag = np.mean(_tag, axis=0) + tag = tag.reshape(L, 1, 1) + # Search maximum response of the missing keypoints + for k in range(K): + if keypoint_scores[n, k] > 0: + continue + dist_map = np.linalg.norm( + keypoint_tags[k] - tag, ord=2, axis=0) + cost_map = np.round(dist_map) * 100 - heatmaps[k] # H, W + y, x = np.unravel_index(np.argmin(cost_map), shape=(H, W)) + keypoints[n, k] = [x, y] + keypoint_scores[n, k] = heatmaps[k, y, x] + + return keypoints, keypoint_scores + + def batch_decode(self, batch_heatmaps: Tensor, batch_tags: Tensor + ) -> Tuple[List[np.ndarray], List[np.ndarray]]: + """Decode the keypoint coordinates from a batch of heatmaps and tagging + heatmaps. The decoded keypoint coordinates are in the input image + space. + + Args: + batch_heatmaps (Tensor): Keypoint detection heatmaps in shape + (B, K, H, W) + batch_tags (Tensor): Tagging heatmaps in shape (B, C, H, W), where + :math:`C=L*K` + + Returns: + tuple: + - batch_keypoints (List[np.ndarray]): Decoded keypoint coordinates + of the batch, each is in shape (N, K, D) + - batch_scores (List[np.ndarray]): Decoded keypoint scores of the + batch, each is in shape (N, K). It usually represents the + confidience of the keypoint prediction + """ + B, _, H, W = batch_heatmaps.shape + assert batch_tags.shape[0] == B and batch_tags.shape[2:4] == (H, W), ( + f'Mismatched shapes of heatmap ({batch_heatmaps.shape}) and ' + f'tagging map ({batch_tags.shape})') + + # Heatmap NMS + batch_heatmaps_peak = batch_heatmap_nms(batch_heatmaps, + self.decode_nms_kernel) + + # Get top-k in each heatmap and and convert to numpy + batch_topk_vals, batch_topk_tags, batch_topk_locs = to_numpy( + self._get_batch_topk( + batch_heatmaps_peak, batch_tags, k=self.decode_topk)) + + # Group keypoint candidates into groups (instances) + batch_groups = self._group_keypoints(batch_topk_vals, batch_topk_tags, + batch_topk_locs) + + # Convert to numpy + batch_heatmaps_np = to_numpy(batch_heatmaps) + batch_tags_np = to_numpy(batch_tags) + + # Refine the keypoint prediction + batch_keypoints = [] + batch_keypoint_scores = [] + batch_instance_scores = [] + for i, (groups, heatmaps, tags) in enumerate( + zip(batch_groups, batch_heatmaps_np, batch_tags_np)): + + keypoints, scores = groups[..., :-1], groups[..., -1] + instance_scores = scores.mean(axis=-1) + + if keypoints.size > 0: + # refine keypoint coordinates according to heatmap distribution + if self.use_udp: + keypoints = refine_keypoints_dark_udp( + keypoints, + heatmaps, + blur_kernel_size=self.decode_gaussian_kernel) + else: + keypoints = refine_keypoints(keypoints, heatmaps) + keypoints += self.decode_center_shift * \ + (scores > 0).astype(keypoints.dtype)[..., None] + + # identify missing keypoints + keypoints, scores = self._fill_missing_keypoints( + keypoints, scores, heatmaps, tags) + + batch_keypoints.append(keypoints) + batch_keypoint_scores.append(scores) + batch_instance_scores.append(instance_scores) + + # restore keypoint scale + batch_keypoints = [ + kpts * self.scale_factor for kpts in batch_keypoints + ] + + return batch_keypoints, batch_keypoint_scores, batch_instance_scores diff --git a/mmpose/codecs/base.py b/mmpose/codecs/base.py new file mode 100644 index 0000000000000000000000000000000000000000..b01e8c4b2c974a3cf115a005400baad8e0bf9cd6 --- /dev/null +++ b/mmpose/codecs/base.py @@ -0,0 +1,81 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from abc import ABCMeta, abstractmethod +from typing import Any, List, Optional, Tuple + +import numpy as np +from mmengine.utils import is_method_overridden + + +class BaseKeypointCodec(metaclass=ABCMeta): + """The base class of the keypoint codec. + + A keypoint codec is a module to encode keypoint coordinates to specific + representation (e.g. heatmap) and vice versa. A subclass should implement + the methods :meth:`encode` and :meth:`decode`. + """ + + # pass additional encoding arguments to the `encode` method, beyond the + # mandatory `keypoints` and `keypoints_visible` arguments. + auxiliary_encode_keys = set() + + field_mapping_table = dict() + instance_mapping_table = dict() + label_mapping_table = dict() + + @abstractmethod + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encode keypoints. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibility in shape + (N, K, D) + + Returns: + dict: Encoded items. + """ + + @abstractmethod + def decode(self, encoded: Any) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoints. + + Args: + encoded (any): Encoded keypoint representation using the codec + + Returns: + tuple: + - keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + - keypoints_visible (np.ndarray): Keypoint visibility in shape + (N, K, D) + """ + + def batch_decode(self, batch_encoded: Any + ) -> Tuple[List[np.ndarray], List[np.ndarray]]: + """Decode keypoints. + + Args: + batch_encoded (any): A batch of encoded keypoint + representations + + Returns: + tuple: + - batch_keypoints (List[np.ndarray]): Each element is keypoint + coordinates in shape (N, K, D) + - batch_keypoints (List[np.ndarray]): Each element is keypoint + visibility in shape (N, K) + """ + raise NotImplementedError() + + @property + def support_batch_decoding(self) -> bool: + """Return whether the codec support decoding from batch data.""" + return is_method_overridden('batch_decode', BaseKeypointCodec, + self.__class__) diff --git a/mmpose/codecs/decoupled_heatmap.py b/mmpose/codecs/decoupled_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..b5929e3dcf3f24092d6aa2887e4a2ff7e4903b9b --- /dev/null +++ b/mmpose/codecs/decoupled_heatmap.py @@ -0,0 +1,274 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import random +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_gaussian_heatmaps, get_diagonal_lengths, + get_instance_bbox, get_instance_root) +from .utils.post_processing import get_heatmap_maximum +from .utils.refinement import refine_keypoints + + +@KEYPOINT_CODECS.register_module() +class DecoupledHeatmap(BaseKeypointCodec): + """Encode/decode keypoints with the method introduced in the paper CID. + + See the paper Contextual Instance Decoupling for Robust Multi-Person + Pose Estimation`_ by Wang et al (2022) for details + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + - heatmaps (np.ndarray): The coupled heatmap in shape + (1+K, H, W) where [W, H] is the `heatmap_size`. + - instance_heatmaps (np.ndarray): The decoupled heatmap in shape + (M*K, H, W) where M is the number of instances. + - keypoint_weights (np.ndarray): The weight for heatmaps in shape + (M*K). + - instance_coords (np.ndarray): The coordinates of instance roots + in shape (M, 2) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + root_type (str): The method to generate the instance root. Options + are: + + - ``'kpt_center'``: Average coordinate of all visible keypoints. + - ``'bbox_center'``: Center point of bounding boxes outlined by + all visible keypoints. + + Defaults to ``'kpt_center'`` + + heatmap_min_overlap (float): Minimum overlap rate among instances. + Used when calculating sigmas for instances. Defaults to 0.7 + background_weight (float): Loss weight of background pixels. + Defaults to 0.1 + encode_max_instances (int): The maximum number of instances + to encode for each sample. Defaults to 30 + + .. _`CID`: https://openaccess.thecvf.com/content/CVPR2022/html/Wang_ + Contextual_Instance_Decoupling_for_Robust_Multi-Person_Pose_Estimation_ + CVPR_2022_paper.html + """ + + # DecoupledHeatmap requires bounding boxes to determine the size of each + # instance, so that it can assign varying sigmas based on their size + auxiliary_encode_keys = {'bbox'} + + label_mapping_table = dict( + keypoint_weights='keypoint_weights', + instance_coords='instance_coords', + ) + field_mapping_table = dict( + heatmaps='heatmaps', + instance_heatmaps='instance_heatmaps', + ) + + def __init__( + self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + root_type: str = 'kpt_center', + heatmap_min_overlap: float = 0.7, + encode_max_instances: int = 30, + ): + super().__init__() + + self.input_size = input_size + self.heatmap_size = heatmap_size + self.root_type = root_type + self.encode_max_instances = encode_max_instances + self.heatmap_min_overlap = heatmap_min_overlap + + self.scale_factor = (np.array(input_size) / + heatmap_size).astype(np.float32) + + def _get_instance_wise_sigmas( + self, + bbox: np.ndarray, + ) -> np.ndarray: + """Get sigma values for each instance according to their size. + + Args: + bbox (np.ndarray): Bounding box in shape (N, 4, 2) + + Returns: + np.ndarray: Array containing the sigma values for each instance. + """ + sigmas = np.zeros((bbox.shape[0], ), dtype=np.float32) + + heights = np.sqrt(np.power(bbox[:, 0] - bbox[:, 1], 2).sum(axis=-1)) + widths = np.sqrt(np.power(bbox[:, 0] - bbox[:, 2], 2).sum(axis=-1)) + + for i in range(bbox.shape[0]): + h, w = heights[i], widths[i] + + # compute sigma for each instance + # condition 1 + a1, b1 = 1, h + w + c1 = w * h * (1 - self.heatmap_min_overlap) / ( + 1 + self.heatmap_min_overlap) + sq1 = np.sqrt(b1**2 - 4 * a1 * c1) + r1 = (b1 + sq1) / 2 + + # condition 2 + a2 = 4 + b2 = 2 * (h + w) + c2 = (1 - self.heatmap_min_overlap) * w * h + sq2 = np.sqrt(b2**2 - 4 * a2 * c2) + r2 = (b2 + sq2) / 2 + + # condition 3 + a3 = 4 * self.heatmap_min_overlap + b3 = -2 * self.heatmap_min_overlap * (h + w) + c3 = (self.heatmap_min_overlap - 1) * w * h + sq3 = np.sqrt(b3**2 - 4 * a3 * c3) + r3 = (b3 + sq3) / 2 + + sigmas[i] = min(r1, r2, r3) / 3 + + return sigmas + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + bbox: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + bbox (np.ndarray): Bounding box in shape (N, 8) which includes + coordinates of 4 corners. + + Returns: + dict: + - heatmaps (np.ndarray): The coupled heatmap in shape + (1+K, H, W) where [W, H] is the `heatmap_size`. + - instance_heatmaps (np.ndarray): The decoupled heatmap in shape + (N*K, H, W) where M is the number of instances. + - keypoint_weights (np.ndarray): The weight for heatmaps in shape + (N*K). + - instance_coords (np.ndarray): The coordinates of instance roots + in shape (N, 2) + """ + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + if bbox is None: + # generate pseudo bbox via visible keypoints + bbox = get_instance_bbox(keypoints, keypoints_visible) + bbox = np.tile(bbox, 2).reshape(-1, 4, 2) + # corner order: left_top, left_bottom, right_top, right_bottom + bbox[:, 1:3, 0] = bbox[:, 0:2, 0] + + # keypoint coordinates in heatmap + _keypoints = keypoints / self.scale_factor + _bbox = bbox.reshape(-1, 4, 2) / self.scale_factor + + # compute the root and scale of each instance + roots, roots_visible = get_instance_root(_keypoints, keypoints_visible, + self.root_type) + + sigmas = self._get_instance_wise_sigmas(_bbox) + + # generate global heatmaps + heatmaps, keypoint_weights = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=np.concatenate((_keypoints, roots[:, None]), axis=1), + keypoints_visible=np.concatenate( + (keypoints_visible, roots_visible[:, None]), axis=1), + sigma=sigmas) + roots_visible = keypoint_weights[:, -1] + + # select instances + inst_roots, inst_indices = [], [] + diagonal_lengths = get_diagonal_lengths(_keypoints, keypoints_visible) + for i in np.argsort(diagonal_lengths): + if roots_visible[i] < 1: + continue + # rand root point in 3x3 grid + x, y = roots[i] + np.random.randint(-1, 2, (2, )) + x = max(0, min(x, self.heatmap_size[0] - 1)) + y = max(0, min(y, self.heatmap_size[1] - 1)) + if (x, y) not in inst_roots: + inst_roots.append((x, y)) + inst_indices.append(i) + if len(inst_indices) > self.encode_max_instances: + rand_indices = random.sample( + range(len(inst_indices)), self.encode_max_instances) + inst_roots = [inst_roots[i] for i in rand_indices] + inst_indices = [inst_indices[i] for i in rand_indices] + + # generate instance-wise heatmaps + inst_heatmaps, inst_heatmap_weights = [], [] + for i in inst_indices: + inst_heatmap, inst_heatmap_weight = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=_keypoints[i:i + 1], + keypoints_visible=keypoints_visible[i:i + 1], + sigma=sigmas[i].item()) + inst_heatmaps.append(inst_heatmap) + inst_heatmap_weights.append(inst_heatmap_weight) + + if len(inst_indices) > 0: + inst_heatmaps = np.concatenate(inst_heatmaps) + inst_heatmap_weights = np.concatenate(inst_heatmap_weights) + inst_roots = np.array(inst_roots, dtype=np.int32) + else: + inst_heatmaps = np.empty((0, *self.heatmap_size[::-1])) + inst_heatmap_weights = np.empty((0, )) + inst_roots = np.empty((0, 2), dtype=np.int32) + + encoded = dict( + heatmaps=heatmaps, + instance_heatmaps=inst_heatmaps, + keypoint_weights=inst_heatmap_weights, + instance_coords=inst_roots) + + return encoded + + def decode(self, instance_heatmaps: np.ndarray, + instance_scores: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from decoupled heatmaps. The decoded + keypoint coordinates are in the input image space. + + Args: + instance_heatmaps (np.ndarray): Heatmaps in shape (N, K, H, W) + instance_scores (np.ndarray): Confidence of instance roots + prediction in shape (N, 1) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + keypoints, keypoint_scores = [], [] + + for i in range(instance_heatmaps.shape[0]): + heatmaps = instance_heatmaps[i].copy() + kpts, scores = get_heatmap_maximum(heatmaps) + keypoints.append(refine_keypoints(kpts[None], heatmaps)) + keypoint_scores.append(scores[None]) + + keypoints = np.concatenate(keypoints) + # Restore the keypoint scale + keypoints = keypoints * self.scale_factor + + keypoint_scores = np.concatenate(keypoint_scores) + keypoint_scores *= instance_scores + + return keypoints, keypoint_scores diff --git a/mmpose/codecs/double_probmap.py b/mmpose/codecs/double_probmap.py new file mode 100644 index 0000000000000000000000000000000000000000..5cced131dfdfbdeb9f9a432859b8688f4bffc451 --- /dev/null +++ b/mmpose/codecs/double_probmap.py @@ -0,0 +1,296 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import cv2 +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_offset_heatmap, generate_udp_gaussian_heatmaps, + get_heatmap_maximum, refine_keypoints_dark_udp, generate_probmaps, get_heatmap_expected_value) + + +@KEYPOINT_CODECS.register_module() +class DoubleProbMap(BaseKeypointCodec): + r"""Generate two probability maps for keypoint detection using expected OKS scores. + See the paper: `ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`_ + by Purkrabek et al. (2025) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmaps (np.ndarray): The inner probability map in shape (K, H, W) + where [W, H] is the `heatmap_size`, and K is the number of keypoints. + Each pixel value represents the expected OKS score if that pixel is + predicted as the keypoint location, given the ground truth location. + Generated using standard padding. + - out_heatmaps (np.ndarray): The outer probability map with same shape + as heatmaps but generated using larger padding to better handle + keypoints near and beyond image boundaries. + - keypoint_weights (np.ndarray): The target weights in shape (K,) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + in_heatmap_padding (float): Padding factor for inner probability map. + A value of 1.0 means no padding. Defaults to 1.0 + out_heatmap_padding (float): Padding factor for outer probability map. + Should be larger than in_heatmap_padding. Defaults to 1.0 + heatmap_type (str): The heatmap type to encode the keypoints. Options + are: + + - ``'gaussian'``: Gaussian heatmap + - ``'combined'``: Combination of a binary label map and offset + maps for X and Y axes. + + sigma (float): The sigma value of the Gaussian heatmap when + ``heatmap_type=='gaussian'``. Defaults to 2.0 + radius_factor (float): The radius factor of the binary label + map when ``heatmap_type=='combined'``. The positive region is + defined as the neighbor of the keypoint with the radius + :math:`r=radius_factor*max(W, H)`. Defaults to 0.0546875 + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. Defaults to 11 + + .. _`ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`: + https://arxiv.org/abs/2412.02254 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + in_heatmap_padding: float = 1.0, + out_heatmap_padding: float = 1.0, + heatmap_type: str = 'gaussian', + sigma: float = 2., + radius_factor: float = 0.0546875, + blur_kernel_size: int = 11, + ) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.sigma = sigma + self.radius_factor = radius_factor + self.heatmap_type = heatmap_type + self.blur_kernel_size = blur_kernel_size + + self.input_center = np.array(input_size) / 2 + self.input_wh = np.array(input_size) + self.heatmap_center = np.array(heatmap_size) / 2 + self.heatmap_wh = np.array(heatmap_size) + + self.in_heatmap_padding = in_heatmap_padding + self.out_heatmap_padding = out_heatmap_padding + + self.in_activation_map_wh = self.input_wh * in_heatmap_padding + self.out_activation_map_wh = self.input_wh * out_heatmap_padding + self.in_activation_map_tl = self.input_center - self.in_activation_map_wh / 2 + self.out_activation_map_tl = self.input_center - self.out_activation_map_wh / 2 + + self.in_scale_factor = ((self.in_activation_map_wh - 1) / + (np.array(heatmap_size)-1)).astype(np.float32) + self.out_scale_factor = ((self.out_activation_map_wh - 1) / + (np.array(heatmap_size)-1)).astype(np.float32) + + if self.heatmap_type not in {'gaussian', 'combined'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + def _kpts_to_activation_pts(self, keypoints: np.ndarray, htm_type: str = "in") -> np.ndarray: + """ + Transform the keypoint coordinates to the activation space. + In the original UDPHeatmap, activation map is the same as the input image space with + different resolution but in this case we allow the activation map to have different + size (padding) than the input image space. + Centers of activation map and input image space are aligned. + """ + assert htm_type in ["in", "out"] + top_left = self.in_activation_map_tl if htm_type == "in" else self.out_activation_map_tl + scale_factor = self.in_scale_factor if htm_type == "in" else self.out_scale_factor + transformed_keypoints = keypoints - top_left + transformed_keypoints = transformed_keypoints / scale_factor + return transformed_keypoints + + def activation_pts_to_kpts(self, keypoints: np.ndarray, htm_type: str = "in") -> np.ndarray: + """ + Transform the points in activation map to the keypoint coordinates. + In the original UDPHeatmap, activation map is the same as the input image space with + different resolution but in this case we allow the activation map to have different + size (padding) than the input image space. + Centers of activation map and input image space are aligned. + """ + assert htm_type in ["in", "out"] + top_left = self.in_activation_map_tl if htm_type == "in" else self.out_activation_map_tl + input_size = self.in_activation_map_wh if htm_type == "in" else self.out_activation_map_wh + W, H = self.heatmap_size + transformed_keypoints = keypoints / [W - 1, H - 1] * input_size + transformed_keypoints += top_left + return transformed_keypoints + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + id_similarity: Optional[float] = 0.0, + keypoints_visibility: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + id_similarity (float): The usefulness of the identity information + for the whole pose. Defaults to 0.0 + keypoints_visibility (np.ndarray): The visibility bit for each + keypoint (N, K). Defaults to None + + Returns: + dict: + - heatmap (np.ndarray): The generated heatmap in shape + (C_out, H, W) where [W, H] is the `heatmap_size`, and the + C_out is the output channel number which depends on the + `heatmap_type`. If `heatmap_type=='gaussian'`, C_out equals to + keypoint number K; if `heatmap_type=='combined'`, C_out + equals to K*3 (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visibility is None: + keypoints_visibility = np.zeros(keypoints.shape[:2], dtype=np.float32) + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if self.heatmap_type == 'gaussian': + heatmaps, keypoint_weights = generate_probmaps( + heatmap_size=self.heatmap_size, + keypoints=self._kpts_to_activation_pts(keypoints, htm_type="in"), + keypoints_visible=keypoints_visible, + sigma=self.sigma, + keypoints_visibility=keypoints_visibility,) + out_heatmaps, out_kpt_weights = generate_probmaps( + heatmap_size=self.heatmap_size, + keypoints=self._kpts_to_activation_pts(keypoints, htm_type="out"), + keypoints_visible=keypoints_visible, + sigma=self.sigma, + keypoints_visibility=keypoints_visibility,) + + elif self.heatmap_type == 'combined': + heatmaps, keypoint_weights = generate_offset_heatmap( + heatmap_size=self.heatmap_size, + keypoints=self._kpts_to_activation_pts(keypoints, htm_type="in"), + keypoints_visible=keypoints_visible, + radius_factor=self.radius_factor) + out_heatmaps, out_kpt_weights = generate_offset_heatmap( + heatmap_size=self.heatmap_size, + keypoints=self._kpts_to_activation_pts(keypoints, htm_type="out"), + keypoints_visible=keypoints_visible, + radius_factor=self.radius_factor) + else: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + annotated = keypoints_visible > 0 + + out_heatmap_keypoints = self._kpts_to_activation_pts(keypoints, htm_type="out") + + in_image = np.logical_and( + out_heatmap_keypoints[:, :, 0] >= 0, + out_heatmap_keypoints[:, :, 0] < self.heatmap_size[0], + ) + in_image = np.logical_and( + in_image, + out_heatmap_keypoints[:, :, 1] >= 0, + ) + in_image = np.logical_and( + in_image, + out_heatmap_keypoints[:, :, 1] < self.heatmap_size[1], + ) + + # Add zero-th dimension to out_heatmaps + out_htms = np.expand_dims(out_heatmaps, axis=0) + + encoded = dict( + heatmaps=heatmaps, + keypoint_weights=keypoint_weights, + out_heatmaps=out_htms, + out_kpt_weights=out_kpt_weights, + annotated=annotated, + in_image=in_image, + keypoints_scaled=keypoints, + identification_similarity=id_similarity, + ) + + return encoded + + def decode(self, encoded: np.ndarray, htm_type: str = "out") -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + htm_type (str): The type of heatmap to decode. Options are: + - ``'in'``: Decode the input heatmap + - ``'out'``: Decode the output heatmap + Defaults to 'in'. + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + assert htm_type in ["in", "out"] + heatmaps = encoded.copy() + + if self.heatmap_type == 'gaussian': + keypoints, scores = get_heatmap_expected_value(heatmaps) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None] + scores = scores[None] + + elif self.heatmap_type == 'combined': + _K, H, W = heatmaps.shape + K = _K // 3 + + for cls_heatmap in heatmaps[::3]: + # Apply Gaussian blur on classification maps + ks = 2 * self.blur_kernel_size + 1 + cv2.GaussianBlur(cls_heatmap, (ks, ks), 0, cls_heatmap) + + # valid radius + radius = self.radius_factor * max(W, H) + + x_offset = heatmaps[1::3].flatten() * radius + y_offset = heatmaps[2::3].flatten() * radius + keypoints, scores = get_heatmap_maximum(heatmaps=heatmaps[::3]) + index = (keypoints[..., 0] + keypoints[..., 1] * W).flatten() + index += W * H * np.arange(0, K) + index = index.astype(int) + keypoints += np.stack((x_offset[index], y_offset[index]), axis=-1) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None].astype(np.float32) + scores = scores[None] + + keypoints = self.activation_pts_to_kpts(keypoints, htm_type=htm_type) + + return keypoints, scores diff --git a/mmpose/codecs/edpose_label.py b/mmpose/codecs/edpose_label.py new file mode 100644 index 0000000000000000000000000000000000000000..0433784886bbd28a38832d0b5ac614e75d446869 --- /dev/null +++ b/mmpose/codecs/edpose_label.py @@ -0,0 +1,153 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from mmpose.structures import bbox_cs2xyxy, bbox_xyxy2cs +from .base import BaseKeypointCodec + + +@KEYPOINT_CODECS.register_module() +class EDPoseLabel(BaseKeypointCodec): + r"""Generate keypoint and label coordinates for `ED-Pose`_ by + Yang J. et al (2023). + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + + Encoded: + + - keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + - keypoints_visible (np.ndarray): Keypoint visibility in shape + (N, K, D) + - area (np.ndarray): Area in shape (N) + - bbox (np.ndarray): Bbox in shape (N, 4) + + Args: + num_select (int): The number of candidate instances + num_keypoints (int): The Number of keypoints + """ + + auxiliary_encode_keys = {'area', 'bboxes', 'img_shape'} + instance_mapping_table = dict( + bbox='bboxes', + keypoints='keypoints', + keypoints_visible='keypoints_visible', + area='areas', + ) + + def __init__(self, num_select: int = 100, num_keypoints: int = 17): + super().__init__() + + self.num_select = num_select + self.num_keypoints = num_keypoints + + def encode( + self, + img_shape, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + area: Optional[np.ndarray] = None, + bboxes: Optional[np.ndarray] = None, + ) -> dict: + """Encoding keypoints, area and bbox from input image space to + normalized space. + + Args: + - img_shape (Sequence[int]): The shape of image in the format + of (width, height). + - keypoints (np.ndarray): Keypoint coordinates in + shape (N, K, D). + - keypoints_visible (np.ndarray): Keypoint visibility in shape + (N, K) + - area (np.ndarray): + - bboxes (np.ndarray): + + Returns: + encoded (dict): Contains the following items: + + - keypoint_labels (np.ndarray): The processed keypoints in + shape like (N, K, D). + - keypoints_visible (np.ndarray): Keypoint visibility in shape + (N, K, D) + - area_labels (np.ndarray): The processed target + area in shape (N). + - bboxes_labels: The processed target bbox in + shape (N, 4). + """ + w, h = img_shape + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if bboxes is not None: + bboxes = np.concatenate(bbox_xyxy2cs(bboxes), axis=-1) + bboxes = bboxes / np.array([w, h, w, h], dtype=np.float32) + + if area is not None: + area = area / float(w * h) + + if keypoints is not None: + keypoints = keypoints / np.array([w, h], dtype=np.float32) + + encoded = dict( + keypoints=keypoints, + area=area, + bbox=bboxes, + keypoints_visible=keypoints_visible) + + return encoded + + def decode(self, input_shapes: np.ndarray, pred_logits: np.ndarray, + pred_boxes: np.ndarray, pred_keypoints: np.ndarray): + """Select the final top-k keypoints, and decode the results from + normalize size to origin input size. + + Args: + input_shapes (Tensor): The size of input image resize. + test_cfg (ConfigType): Config of testing. + pred_logits (Tensor): The result of score. + pred_boxes (Tensor): The result of bbox. + pred_keypoints (Tensor): The result of keypoints. + + Returns: + tuple: Decoded boxes, keypoints, and keypoint scores. + """ + + # Initialization + num_keypoints = self.num_keypoints + prob = pred_logits.reshape(-1) + + # Select top-k instances based on prediction scores + topk_indexes = np.argsort(-prob)[:self.num_select] + topk_values = np.take_along_axis(prob, topk_indexes, axis=0) + scores = np.tile(topk_values[:, np.newaxis], [1, num_keypoints]) + + # Decode bounding boxes + topk_boxes = topk_indexes // pred_logits.shape[1] + boxes = bbox_cs2xyxy(*np.split(pred_boxes, [2], axis=-1)) + boxes = np.take_along_axis( + boxes, np.tile(topk_boxes[:, np.newaxis], [1, 4]), axis=0) + + # Convert from relative to absolute coordinates + img_h, img_w = np.split(input_shapes, 2, axis=0) + scale_fct = np.hstack([img_w, img_h, img_w, img_h]) + boxes = boxes * scale_fct[np.newaxis, :] + + # Decode keypoints + topk_keypoints = topk_indexes // pred_logits.shape[1] + keypoints = np.take_along_axis( + pred_keypoints, + np.tile(topk_keypoints[:, np.newaxis], [1, num_keypoints * 3]), + axis=0) + keypoints = keypoints[:, :(num_keypoints * 2)] + keypoints = keypoints * np.tile( + np.hstack([img_w, img_h]), [num_keypoints])[np.newaxis, :] + keypoints = keypoints.reshape(-1, num_keypoints, 2) + + return boxes, keypoints, scores diff --git a/mmpose/codecs/hand_3d_heatmap.py b/mmpose/codecs/hand_3d_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..b088e0d7faa27e0775152dd0579c2933ec481860 --- /dev/null +++ b/mmpose/codecs/hand_3d_heatmap.py @@ -0,0 +1,202 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils.gaussian_heatmap import generate_3d_gaussian_heatmaps +from .utils.post_processing import get_heatmap_3d_maximum + + +@KEYPOINT_CODECS.register_module() +class Hand3DHeatmap(BaseKeypointCodec): + r"""Generate target 3d heatmap and relative root depth for hand datasets. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + + Args: + image_size (tuple): Size of image. Default: ``[256, 256]``. + root_heatmap_size (int): Size of heatmap of root head. + Default: 64. + heatmap_size (tuple): Size of heatmap. Default: ``[64, 64, 64]``. + heatmap3d_depth_bound (float): Boundary for 3d heatmap depth. + Default: 400.0. + heatmap_size_root (int): Size of 3d heatmap root. Default: 64. + depth_size (int): Number of depth discretization size, used for + decoding. Defaults to 64. + root_depth_bound (float): Boundary for 3d heatmap root depth. + Default: 400.0. + use_different_joint_weights (bool): Whether to use different joint + weights. Default: ``False``. + sigma (int): Sigma of heatmap gaussian. Default: 2. + joint_indices (list, optional): Indices of joints used for heatmap + generation. If None (default) is given, all joints will be used. + Default: ``None``. + max_bound (float): The maximal value of heatmap. Default: 1.0. + """ + + auxiliary_encode_keys = { + 'dataset_keypoint_weights', 'rel_root_depth', 'rel_root_valid', + 'hand_type', 'hand_type_valid', 'focal', 'principal_pt' + } + + instance_mapping_table = { + 'keypoints': 'keypoints', + 'keypoints_visible': 'keypoints_visible', + 'keypoints_cam': 'keypoints_cam', + } + + label_mapping_table = { + 'keypoint_weights': 'keypoint_weights', + 'root_depth_weight': 'root_depth_weight', + 'type_weight': 'type_weight', + 'root_depth': 'root_depth', + 'type': 'type' + } + + def __init__(self, + image_size: Tuple[int, int] = [256, 256], + root_heatmap_size: int = 64, + heatmap_size: Tuple[int, int, int] = [64, 64, 64], + heatmap3d_depth_bound: float = 400.0, + heatmap_size_root: int = 64, + root_depth_bound: float = 400.0, + depth_size: int = 64, + use_different_joint_weights: bool = False, + sigma: int = 2, + joint_indices: Optional[list] = None, + max_bound: float = 1.0): + super().__init__() + + self.image_size = np.array(image_size) + self.root_heatmap_size = root_heatmap_size + self.heatmap_size = np.array(heatmap_size) + self.heatmap3d_depth_bound = heatmap3d_depth_bound + self.heatmap_size_root = heatmap_size_root + self.root_depth_bound = root_depth_bound + self.depth_size = depth_size + self.use_different_joint_weights = use_different_joint_weights + + self.sigma = sigma + self.joint_indices = joint_indices + self.max_bound = max_bound + self.scale_factor = (np.array(image_size) / + heatmap_size[:-1]).astype(np.float32) + + def encode( + self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray], + dataset_keypoint_weights: Optional[np.ndarray], + rel_root_depth: np.float32, + rel_root_valid: np.float32, + hand_type: np.ndarray, + hand_type_valid: np.ndarray, + focal: np.ndarray, + principal_pt: np.ndarray, + ) -> dict: + """Encoding keypoints from input image space to input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D). + keypoints_visible (np.ndarray, optional): Keypoint visibilities in + shape (N, K). + dataset_keypoint_weights (np.ndarray, optional): Keypoints weight + in shape (K, ). + rel_root_depth (np.float32): Relative root depth. + rel_root_valid (float): Validity of relative root depth. + hand_type (np.ndarray): Type of hand encoded as a array. + hand_type_valid (np.ndarray): Validity of hand type. + focal (np.ndarray): Focal length of camera. + principal_pt (np.ndarray): Principal point of camera. + + Returns: + encoded (dict): Contains the following items: + + - heatmaps (np.ndarray): The generated heatmap in shape + (K * D, H, W) where [W, H, D] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + - root_depth (np.ndarray): Encoded relative root depth + - root_depth_weight (np.ndarray): The weights of relative root + depth + - type (np.ndarray): Encoded hand type + - type_weight (np.ndarray): The weights of hand type + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:-1], dtype=np.float32) + + if self.use_different_joint_weights: + assert dataset_keypoint_weights is not None, 'To use different ' \ + 'joint weights,`dataset_keypoint_weights` cannot be None.' + + heatmaps, keypoint_weights = generate_3d_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints, + keypoints_visible=keypoints_visible, + sigma=self.sigma, + image_size=self.image_size, + heatmap3d_depth_bound=self.heatmap3d_depth_bound, + joint_indices=self.joint_indices, + max_bound=self.max_bound, + use_different_joint_weights=self.use_different_joint_weights, + dataset_keypoint_weights=dataset_keypoint_weights) + + rel_root_depth = (rel_root_depth / self.root_depth_bound + + 0.5) * self.heatmap_size_root + rel_root_valid = rel_root_valid * (rel_root_depth >= 0) * ( + rel_root_depth <= self.heatmap_size_root) + + encoded = dict( + heatmaps=heatmaps, + keypoint_weights=keypoint_weights, + root_depth=rel_root_depth * np.ones(1, dtype=np.float32), + type=hand_type, + type_weight=hand_type_valid, + root_depth_weight=rel_root_valid * np.ones(1, dtype=np.float32)) + return encoded + + def decode(self, heatmaps: np.ndarray, root_depth: np.ndarray, + hand_type: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + heatmaps (np.ndarray): Heatmaps in shape (K, D, H, W) + root_depth (np.ndarray): Root depth prediction. + hand_type (np.ndarray): Hand type prediction. + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmap3d = heatmaps.copy() + + keypoints, scores = get_heatmap_3d_maximum(heatmap3d) + + # transform keypoint depth to camera space + keypoints[..., 2] = (keypoints[..., 2] / self.depth_size - + 0.5) * self.heatmap3d_depth_bound + + # Unsqueeze the instance dimension for single-instance results + keypoints, scores = keypoints[None], scores[None] + + # Restore the keypoint scale + keypoints[..., :2] = keypoints[..., :2] * self.scale_factor + + # decode relative hand root depth + # transform relative root depth to camera space + rel_root_depth = ((root_depth / self.root_heatmap_size - 0.5) * + self.root_depth_bound) + + hand_type = (hand_type > 0).reshape(1, -1).astype(int) + + return keypoints, scores, rel_root_depth, hand_type diff --git a/mmpose/codecs/image_pose_lifting.py b/mmpose/codecs/image_pose_lifting.py new file mode 100644 index 0000000000000000000000000000000000000000..1665d88e1d90afc843db4fa453f4004d9ecd12d3 --- /dev/null +++ b/mmpose/codecs/image_pose_lifting.py @@ -0,0 +1,280 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import List, Optional, Tuple, Union + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec + + +@KEYPOINT_CODECS.register_module() +class ImagePoseLifting(BaseKeypointCodec): + r"""Generate keypoint coordinates for pose lifter. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - pose-lifitng target dimension: C + + Args: + num_keypoints (int): The number of keypoints in the dataset. + root_index (Union[int, List]): Root keypoint index in the pose. + remove_root (bool): If true, remove the root keypoint from the pose. + Default: ``False``. + save_index (bool): If true, store the root position separated from the + original pose. Default: ``False``. + reshape_keypoints (bool): If true, reshape the keypoints into shape + (-1, N). Default: ``True``. + concat_vis (bool): If true, concat the visibility item of keypoints. + Default: ``False``. + keypoints_mean (np.ndarray, optional): Mean values of keypoints + coordinates in shape (K, D). + keypoints_std (np.ndarray, optional): Std values of keypoints + coordinates in shape (K, D). + target_mean (np.ndarray, optional): Mean values of pose-lifitng target + coordinates in shape (K, C). + target_std (np.ndarray, optional): Std values of pose-lifitng target + coordinates in shape (K, C). + """ + + auxiliary_encode_keys = {'lifting_target', 'lifting_target_visible'} + + instance_mapping_table = dict( + lifting_target='lifting_target', + lifting_target_visible='lifting_target_visible', + ) + label_mapping_table = dict( + trajectory_weights='trajectory_weights', + lifting_target_label='lifting_target_label', + lifting_target_weight='lifting_target_weight') + + def __init__(self, + num_keypoints: int, + root_index: Union[int, List] = 0, + remove_root: bool = False, + save_index: bool = False, + reshape_keypoints: bool = True, + concat_vis: bool = False, + keypoints_mean: Optional[np.ndarray] = None, + keypoints_std: Optional[np.ndarray] = None, + target_mean: Optional[np.ndarray] = None, + target_std: Optional[np.ndarray] = None, + additional_encode_keys: Optional[List[str]] = None): + super().__init__() + + self.num_keypoints = num_keypoints + if isinstance(root_index, int): + root_index = [root_index] + self.root_index = root_index + self.remove_root = remove_root + self.save_index = save_index + self.reshape_keypoints = reshape_keypoints + self.concat_vis = concat_vis + if keypoints_mean is not None: + assert keypoints_std is not None, 'keypoints_std is None' + keypoints_mean = np.array( + keypoints_mean, + dtype=np.float32).reshape(1, num_keypoints, -1) + keypoints_std = np.array( + keypoints_std, dtype=np.float32).reshape(1, num_keypoints, -1) + + assert keypoints_mean.shape == keypoints_std.shape, ( + f'keypoints_mean.shape {keypoints_mean.shape} != ' + f'keypoints_std.shape {keypoints_std.shape}') + if target_mean is not None: + assert target_std is not None, 'target_std is None' + target_dim = num_keypoints - 1 if remove_root else num_keypoints + target_mean = np.array( + target_mean, dtype=np.float32).reshape(1, target_dim, -1) + target_std = np.array( + target_std, dtype=np.float32).reshape(1, target_dim, -1) + + assert target_mean.shape == target_std.shape, ( + f'target_mean.shape {target_mean.shape} != ' + f'target_std.shape {target_std.shape}') + self.keypoints_mean = keypoints_mean + self.keypoints_std = keypoints_std + self.target_mean = target_mean + self.target_std = target_std + + if additional_encode_keys is not None: + self.auxiliary_encode_keys.update(additional_encode_keys) + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + lifting_target: Optional[np.ndarray] = None, + lifting_target_visible: Optional[np.ndarray] = None) -> dict: + """Encoding keypoints from input image space to normalized space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D). + keypoints_visible (np.ndarray, optional): Keypoint visibilities in + shape (N, K). + lifting_target (np.ndarray, optional): 3d target coordinate in + shape (T, K, C). + lifting_target_visible (np.ndarray, optional): Target coordinate in + shape (T, K, ). + + Returns: + encoded (dict): Contains the following items: + + - keypoint_labels (np.ndarray): The processed keypoints in + shape like (N, K, D) or (K * D, N). + - keypoint_labels_visible (np.ndarray): The processed + keypoints' weights in shape (N, K, ) or (N-1, K, ). + - lifting_target_label: The processed target coordinate in + shape (K, C) or (K-1, C). + - lifting_target_weight (np.ndarray): The target weights in + shape (K, ) or (K-1, ). + - trajectory_weights (np.ndarray): The trajectory weights in + shape (K, ). + - target_root (np.ndarray): The root coordinate of target in + shape (C, ). + + In addition, there are some optional items it may contain: + + - target_root (np.ndarray): The root coordinate of target in + shape (C, ). Exists if ``zero_center`` is ``True``. + - target_root_removed (bool): Indicate whether the root of + pose-lifitng target is removed. Exists if + ``remove_root`` is ``True``. + - target_root_index (int): An integer indicating the index of + root. Exists if ``remove_root`` and ``save_index`` + are ``True``. + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if lifting_target is None: + lifting_target = [keypoints[0]] + + # set initial value for `lifting_target_weight` + # and `trajectory_weights` + if lifting_target_visible is None: + lifting_target_visible = np.ones( + lifting_target.shape[:-1], dtype=np.float32) + lifting_target_weight = lifting_target_visible + trajectory_weights = (1 / lifting_target[:, 2]) + else: + valid = lifting_target_visible > 0.5 + lifting_target_weight = np.where(valid, 1., 0.).astype(np.float32) + trajectory_weights = lifting_target_weight + + encoded = dict() + + # Zero-center the target pose around a given root keypoint + assert (lifting_target.ndim >= 2 and + lifting_target.shape[-2] > max(self.root_index)), \ + f'Got invalid joint shape {lifting_target.shape}' + + root = np.mean( + lifting_target[..., self.root_index, :], axis=-2, dtype=np.float32) + lifting_target_label = lifting_target - root[np.newaxis, ...] + + if self.remove_root and len(self.root_index) == 1: + root_index = self.root_index[0] + lifting_target_label = np.delete( + lifting_target_label, root_index, axis=-2) + lifting_target_visible = np.delete( + lifting_target_visible, root_index, axis=-2) + assert lifting_target_weight.ndim in { + 2, 3 + }, (f'lifting_target_weight.ndim {lifting_target_weight.ndim} ' + 'is not in {2, 3}') + + axis_to_remove = -2 if lifting_target_weight.ndim == 3 else -1 + lifting_target_weight = np.delete( + lifting_target_weight, root_index, axis=axis_to_remove) + # Add a flag to avoid latter transforms that rely on the root + # joint or the original joint index + encoded['target_root_removed'] = True + + # Save the root index which is necessary to restore the global pose + if self.save_index: + encoded['target_root_index'] = root_index + + # Normalize the 2D keypoint coordinate with mean and std + keypoint_labels = keypoints.copy() + + if self.keypoints_mean is not None: + assert self.keypoints_mean.shape[1:] == keypoints.shape[1:], ( + f'self.keypoints_mean.shape[1:] {self.keypoints_mean.shape[1:]} ' # noqa + f'!= keypoints.shape[1:] {keypoints.shape[1:]}') + encoded['keypoints_mean'] = self.keypoints_mean.copy() + encoded['keypoints_std'] = self.keypoints_std.copy() + + keypoint_labels = (keypoint_labels - + self.keypoints_mean) / self.keypoints_std + if self.target_mean is not None: + assert self.target_mean.shape == lifting_target_label.shape, ( + f'self.target_mean.shape {self.target_mean.shape} ' + f'!= lifting_target_label.shape {lifting_target_label.shape}' # noqa + ) + encoded['target_mean'] = self.target_mean.copy() + encoded['target_std'] = self.target_std.copy() + + lifting_target_label = (lifting_target_label - + self.target_mean) / self.target_std + + # Generate reshaped keypoint coordinates + assert keypoint_labels.ndim in { + 2, 3 + }, (f'keypoint_labels.ndim {keypoint_labels.ndim} is not in {2, 3}') + if keypoint_labels.ndim == 2: + keypoint_labels = keypoint_labels[None, ...] + + if self.concat_vis: + keypoints_visible_ = keypoints_visible + if keypoints_visible.ndim == 2: + keypoints_visible_ = keypoints_visible[..., None] + keypoint_labels = np.concatenate( + (keypoint_labels, keypoints_visible_), axis=2) + + if self.reshape_keypoints: + N = keypoint_labels.shape[0] + keypoint_labels = keypoint_labels.transpose(1, 2, 0).reshape(-1, N) + + encoded['keypoint_labels'] = keypoint_labels + encoded['keypoint_labels_visible'] = keypoints_visible + encoded['lifting_target_label'] = lifting_target_label + encoded['lifting_target_weight'] = lifting_target_weight + encoded['trajectory_weights'] = trajectory_weights + encoded['target_root'] = root + + return encoded + + def decode(self, + encoded: np.ndarray, + target_root: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from normalized space to input image + space. + + Args: + encoded (np.ndarray): Coordinates in shape (N, K, C). + target_root (np.ndarray, optional): The target root coordinate. + Default: ``None``. + + Returns: + keypoints (np.ndarray): Decoded coordinates in shape (N, K, C). + scores (np.ndarray): The keypoint scores in shape (N, K). + """ + keypoints = encoded.copy() + + if self.target_mean is not None and self.target_std is not None: + assert self.target_mean.shape == keypoints.shape, ( + f'self.target_mean.shape {self.target_mean.shape} ' + f'!= keypoints.shape {keypoints.shape}') + keypoints = keypoints * self.target_std + self.target_mean + + if target_root is not None and target_root.size > 0: + keypoints = keypoints + target_root + if self.remove_root and len(self.root_index) == 1: + keypoints = np.insert( + keypoints, self.root_index, target_root, axis=1) + scores = np.ones(keypoints.shape[:-1], dtype=np.float32) + + return keypoints, scores diff --git a/mmpose/codecs/integral_regression_label.py b/mmpose/codecs/integral_regression_label.py new file mode 100644 index 0000000000000000000000000000000000000000..a3ded1f00b89cfe6c67107529d0787eb1acc49cb --- /dev/null +++ b/mmpose/codecs/integral_regression_label.py @@ -0,0 +1,121 @@ +# Copyright (c) OpenMMLab. All rights reserved. + +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .msra_heatmap import MSRAHeatmap +from .regression_label import RegressionLabel + + +@KEYPOINT_CODECS.register_module() +class IntegralRegressionLabel(BaseKeypointCodec): + """Generate keypoint coordinates and normalized heatmaps. See the paper: + `DSNT`_ by Nibali et al(2018). + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + + Encoded: + + - keypoint_labels (np.ndarray): The normalized regression labels in + shape (N, K, D) where D is 2 for 2d coordinates + - heatmaps (np.ndarray): The generated heatmap in shape (K, H, W) where + [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Input image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + sigma (float): The sigma value of the Gaussian heatmap + unbiased (bool): Whether use unbiased method (DarkPose) in ``'msra'`` + encoding. See `Dark Pose`_ for details. Defaults to ``False`` + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. The kernel size and sigma should follow + the expirical formula :math:`sigma = 0.3*((ks-1)*0.5-1)+0.8`. + Defaults to 11 + normalize (bool): Whether to normalize the heatmaps. Defaults to True. + + .. _`DSNT`: https://arxiv.org/abs/1801.07372 + """ + + label_mapping_table = dict( + keypoint_labels='keypoint_labels', + keypoint_weights='keypoint_weights', + ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + sigma: float, + unbiased: bool = False, + blur_kernel_size: int = 11, + normalize: bool = True) -> None: + super().__init__() + + self.heatmap_codec = MSRAHeatmap(input_size, heatmap_size, sigma, + unbiased, blur_kernel_size) + self.keypoint_codec = RegressionLabel(input_size) + self.normalize = normalize + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encoding keypoints to regression labels and heatmaps. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - keypoint_labels (np.ndarray): The normalized regression labels in + shape (N, K, D) where D is 2 for 2d coordinates + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + encoded_hm = self.heatmap_codec.encode(keypoints, keypoints_visible) + encoded_kp = self.keypoint_codec.encode(keypoints, keypoints_visible) + + heatmaps = encoded_hm['heatmaps'] + keypoint_labels = encoded_kp['keypoint_labels'] + keypoint_weights = encoded_kp['keypoint_weights'] + + if self.normalize: + val_sum = heatmaps.sum(axis=(-1, -2)).reshape(-1, 1, 1) + 1e-24 + heatmaps = heatmaps / val_sum + + encoded = dict( + keypoint_labels=keypoint_labels, + heatmaps=heatmaps, + keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from normalized space to input image + space. + + Args: + encoded (np.ndarray): Coordinates in shape (N, K, D) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded coordinates in shape (N, K, D) + - socres (np.ndarray): The keypoint scores in shape (N, K). + It usually represents the confidence of the keypoint prediction + """ + + keypoints, scores = self.keypoint_codec.decode(encoded) + + return keypoints, scores diff --git a/mmpose/codecs/megvii_heatmap.py b/mmpose/codecs/megvii_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..3af0a54ff832f87e3e546e5e0b754dd95fa40bba --- /dev/null +++ b/mmpose/codecs/megvii_heatmap.py @@ -0,0 +1,147 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Optional, Tuple + +import cv2 +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import gaussian_blur, get_heatmap_maximum + + +@KEYPOINT_CODECS.register_module() +class MegviiHeatmap(BaseKeypointCodec): + """Represent keypoints as heatmaps via "Megvii" approach. See `MSPN`_ + (2019) and `CPN`_ (2018) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmaps (np.ndarray): The generated heatmap in shape (K, H, W) + where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + kernel_size (tuple): The kernel size of the heatmap gaussian in + [ks_x, ks_y] + + .. _`MSPN`: https://arxiv.org/abs/1901.00148 + .. _`CPN`: https://arxiv.org/abs/1711.07319 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__( + self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + kernel_size: int, + ) -> None: + + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.kernel_size = kernel_size + self.scale_factor = (np.array(input_size) / + heatmap_size).astype(np.float32) + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + + N, K, _ = keypoints.shape + W, H = self.heatmap_size + + assert N == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + heatmaps = np.zeros((K, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + for n, k in product(range(N), range(K)): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + # get center coordinates + kx, ky = (keypoints[n, k] / self.scale_factor).astype(np.int64) + if kx < 0 or kx >= W or ky < 0 or ky >= H: + keypoint_weights[n, k] = 0 + continue + + heatmaps[k, ky, kx] = 1. + kernel_size = (self.kernel_size, self.kernel_size) + heatmaps[k] = cv2.GaussianBlur(heatmaps[k], kernel_size, 0) + + # normalize the heatmap + heatmaps[k] = heatmaps[k] / heatmaps[k, ky, kx] * 255. + + encoded = dict(heatmaps=heatmaps, keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (K, D) + - scores (np.ndarray): The keypoint scores in shape (K,). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = gaussian_blur(encoded.copy(), self.kernel_size) + K, H, W = heatmaps.shape + + keypoints, scores = get_heatmap_maximum(heatmaps) + + for k in range(K): + heatmap = heatmaps[k] + px = int(keypoints[k, 0]) + py = int(keypoints[k, 1]) + if 1 < px < W - 1 and 1 < py < H - 1: + diff = np.array([ + heatmap[py][px + 1] - heatmap[py][px - 1], + heatmap[py + 1][px] - heatmap[py - 1][px] + ]) + keypoints[k] += (np.sign(diff) * 0.25 + 0.5) + + scores = scores / 255.0 + 0.5 + + # Unsqueeze the instance dimension for single-instance results + # and restore the keypoint scales + keypoints = keypoints[None] * self.scale_factor + scores = scores[None] + + return keypoints, scores diff --git a/mmpose/codecs/motionbert_label.py b/mmpose/codecs/motionbert_label.py new file mode 100644 index 0000000000000000000000000000000000000000..98024ea4e63d1ca836808c950d72b4760b969c41 --- /dev/null +++ b/mmpose/codecs/motionbert_label.py @@ -0,0 +1,240 @@ +# Copyright (c) OpenMMLab. All rights reserved. + +from copy import deepcopy +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import camera_to_image_coord + + +@KEYPOINT_CODECS.register_module() +class MotionBERTLabel(BaseKeypointCodec): + r"""Generate keypoint and label coordinates for `MotionBERT`_ by Zhu et al + (2022). + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - pose-lifitng target dimension: C + + Args: + num_keypoints (int): The number of keypoints in the dataset. + root_index (int): Root keypoint index in the pose. Default: 0. + remove_root (bool): If true, remove the root keypoint from the pose. + Default: ``False``. + save_index (bool): If true, store the root position separated from the + original pose, only takes effect if ``remove_root`` is ``True``. + Default: ``False``. + concat_vis (bool): If true, concat the visibility item of keypoints. + Default: ``False``. + rootrel (bool): If true, the root keypoint will be set to the + coordinate origin. Default: ``False``. + mode (str): Indicating whether the current mode is 'train' or 'test'. + Default: ``'test'``. + """ + + auxiliary_encode_keys = { + 'lifting_target', 'lifting_target_visible', 'camera_param', 'factor' + } + + instance_mapping_table = dict( + lifting_target='lifting_target', + lifting_target_visible='lifting_target_visible', + ) + label_mapping_table = dict( + trajectory_weights='trajectory_weights', + lifting_target_label='lifting_target_label', + lifting_target_weight='lifting_target_weight') + + def __init__(self, + num_keypoints: int, + root_index: int = 0, + remove_root: bool = False, + save_index: bool = False, + concat_vis: bool = False, + rootrel: bool = False, + mode: str = 'test'): + super().__init__() + + self.num_keypoints = num_keypoints + self.root_index = root_index + self.remove_root = remove_root + self.save_index = save_index + self.concat_vis = concat_vis + self.rootrel = rootrel + assert mode.lower() in {'train', 'test' + }, (f'Unsupported mode {mode}, ' + 'mode should be one of ("train", "test").') + self.mode = mode.lower() + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + lifting_target: Optional[np.ndarray] = None, + lifting_target_visible: Optional[np.ndarray] = None, + camera_param: Optional[dict] = None, + factor: Optional[np.ndarray] = None) -> dict: + """Encoding keypoints from input image space to normalized space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (B, T, K, D). + keypoints_visible (np.ndarray, optional): Keypoint visibilities in + shape (B, T, K). + lifting_target (np.ndarray, optional): 3d target coordinate in + shape (T, K, C). + lifting_target_visible (np.ndarray, optional): Target coordinate in + shape (T, K, ). + camera_param (dict, optional): The camera parameter dictionary. + factor (np.ndarray, optional): The factor mapping camera and image + coordinate in shape (T, ). + + Returns: + encoded (dict): Contains the following items: + + - keypoint_labels (np.ndarray): The processed keypoints in + shape like (N, K, D). + - keypoint_labels_visible (np.ndarray): The processed + keypoints' weights in shape (N, K, ) or (N, K-1, ). + - lifting_target_label: The processed target coordinate in + shape (K, C) or (K-1, C). + - lifting_target_weight (np.ndarray): The target weights in + shape (K, ) or (K-1, ). + - factor (np.ndarray): The factor mapping camera and image + coordinate in shape (T, 1). + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + # set initial value for `lifting_target_weight` + if lifting_target_visible is None: + lifting_target_visible = np.ones( + lifting_target.shape[:-1], dtype=np.float32) + lifting_target_weight = lifting_target_visible + else: + valid = lifting_target_visible > 0.5 + lifting_target_weight = np.where(valid, 1., 0.).astype(np.float32) + + if camera_param is None: + camera_param = dict() + + encoded = dict() + + assert lifting_target is not None + lifting_target_label = lifting_target.copy() + keypoint_labels = keypoints.copy() + + assert keypoint_labels.ndim in { + 2, 3 + }, (f'Keypoint labels should have 2 or 3 dimensions, ' + f'but got {keypoint_labels.ndim}.') + if keypoint_labels.ndim == 2: + keypoint_labels = keypoint_labels[None, ...] + + # Normalize the 2D keypoint coordinate with image width and height + _camera_param = deepcopy(camera_param) + assert 'w' in _camera_param and 'h' in _camera_param, ( + 'Camera parameters should contain "w" and "h".') + w, h = _camera_param['w'], _camera_param['h'] + keypoint_labels[ + ..., :2] = keypoint_labels[..., :2] / w * 2 - [1, h / w] + + # convert target to image coordinate + T = keypoint_labels.shape[0] + factor_ = np.array([4] * T, dtype=np.float32).reshape(T, ) + if 'f' in _camera_param and 'c' in _camera_param: + lifting_target_label, factor_ = camera_to_image_coord( + self.root_index, lifting_target_label, _camera_param) + if self.mode == 'train': + w, h = w / 1000, h / 1000 + lifting_target_label[ + ..., :2] = lifting_target_label[..., :2] / w * 2 - [1, h / w] + lifting_target_label[..., 2] = lifting_target_label[..., 2] / w * 2 + lifting_target_label[..., :, :] = lifting_target_label[ + ..., :, :] - lifting_target_label[..., + self.root_index:self.root_index + + 1, :] + if factor is None or factor[0] == 0: + factor = factor_ + if factor.ndim == 1: + factor = factor[:, None] + if self.mode == 'test': + lifting_target_label *= factor[..., None] + + if self.concat_vis: + keypoints_visible_ = keypoints_visible + if keypoints_visible.ndim == 2: + keypoints_visible_ = keypoints_visible[..., None] + keypoint_labels = np.concatenate( + (keypoint_labels, keypoints_visible_), axis=2) + + encoded['keypoint_labels'] = keypoint_labels + encoded['keypoint_labels_visible'] = keypoints_visible + encoded['lifting_target_label'] = lifting_target_label + encoded['lifting_target_weight'] = lifting_target_weight + encoded['lifting_target'] = lifting_target_label + encoded['lifting_target_visible'] = lifting_target_visible + encoded['factor'] = factor + + return encoded + + def decode( + self, + encoded: np.ndarray, + w: Optional[np.ndarray] = None, + h: Optional[np.ndarray] = None, + factor: Optional[np.ndarray] = None, + ) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from normalized space to input image + space. + + Args: + encoded (np.ndarray): Coordinates in shape (N, K, C). + w (np.ndarray, optional): The image widths in shape (N, ). + Default: ``None``. + h (np.ndarray, optional): The image heights in shape (N, ). + Default: ``None``. + factor (np.ndarray, optional): The factor for projection in shape + (N, ). Default: ``None``. + + Returns: + keypoints (np.ndarray): Decoded coordinates in shape (N, K, C). + scores (np.ndarray): The keypoint scores in shape (N, K). + """ + keypoints = encoded.copy() + scores = np.ones(keypoints.shape[:-1], dtype=np.float32) + + if self.rootrel: + keypoints[..., 0, :] = 0 + + if w is not None and w.size > 0: + assert w.shape == h.shape, (f'w and h should have the same shape, ' + f'but got {w.shape} and {h.shape}.') + assert w.shape[0] == keypoints.shape[0], ( + f'w and h should have the same batch size, ' + f'but got {w.shape[0]} and {keypoints.shape[0]}.') + assert w.ndim in {1, + 2}, (f'w and h should have 1 or 2 dimensions, ' + f'but got {w.ndim}.') + if w.ndim == 1: + w = w[:, None] + h = h[:, None] + trans = np.append( + np.ones((w.shape[0], 1)), h / w, axis=1)[:, None, :] + keypoints[..., :2] = (keypoints[..., :2] + trans) * w[:, None] / 2 + keypoints[..., 2:] = keypoints[..., 2:] * w[:, None] / 2 + + if factor is not None and factor.size > 0: + assert factor.shape[0] == keypoints.shape[0], ( + f'factor should have the same batch size, ' + f'but got {factor.shape[0]} and {keypoints.shape[0]}.') + keypoints *= factor[..., None] + + keypoints[..., :, :] = keypoints[..., :, :] - keypoints[ + ..., self.root_index:self.root_index + 1, :] + keypoints /= 1000. + return keypoints, scores diff --git a/mmpose/codecs/msra_heatmap.py b/mmpose/codecs/msra_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..15742555b495560c9dfa095a3cdc93ba0eb5d928 --- /dev/null +++ b/mmpose/codecs/msra_heatmap.py @@ -0,0 +1,153 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils.gaussian_heatmap import (generate_gaussian_heatmaps, + generate_unbiased_gaussian_heatmaps) +from .utils.post_processing import get_heatmap_maximum +from .utils.refinement import refine_keypoints, refine_keypoints_dark + + +@KEYPOINT_CODECS.register_module() +class MSRAHeatmap(BaseKeypointCodec): + """Represent keypoints as heatmaps via "MSRA" approach. See the paper: + `Simple Baselines for Human Pose Estimation and Tracking`_ by Xiao et al + (2018) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmaps (np.ndarray): The generated heatmap in shape (K, H, W) + where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + sigma (float): The sigma value of the Gaussian heatmap + unbiased (bool): Whether use unbiased method (DarkPose) in ``'msra'`` + encoding. See `Dark Pose`_ for details. Defaults to ``False`` + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. The kernel size and sigma should follow + the expirical formula :math:`sigma = 0.3*((ks-1)*0.5-1)+0.8`. + Defaults to 11 + + .. _`Simple Baselines for Human Pose Estimation and Tracking`: + https://arxiv.org/abs/1804.06208 + .. _`Dark Pose`: https://arxiv.org/abs/1910.06278 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + sigma: float, + unbiased: bool = False, + blur_kernel_size: int = 11) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.sigma = sigma + self.unbiased = unbiased + + # The Gaussian blur kernel size of the heatmap modulation + # in DarkPose and the sigma value follows the expirical + # formula :math:`sigma = 0.3*((ks-1)*0.5-1)+0.8` + # which gives: + # sigma~=3 if ks=17 + # sigma=2 if ks=11; + # sigma~=1.5 if ks=7; + # sigma~=1 if ks=3; + self.blur_kernel_size = blur_kernel_size + self.scale_factor = (np.array(input_size) / + heatmap_size).astype(np.float32) + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if self.unbiased: + heatmaps, keypoint_weights = generate_unbiased_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + sigma=self.sigma) + else: + heatmaps, keypoint_weights = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + sigma=self.sigma) + + encoded = dict(heatmaps=heatmaps, keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = encoded.copy() + K, H, W = heatmaps.shape + + keypoints, scores = get_heatmap_maximum(heatmaps) + + # Unsqueeze the instance dimension for single-instance results + keypoints, scores = keypoints[None], scores[None] + + if self.unbiased: + # Alleviate biased coordinate + keypoints = refine_keypoints_dark( + keypoints, heatmaps, blur_kernel_size=self.blur_kernel_size) + + else: + keypoints = refine_keypoints(keypoints, heatmaps) + + # Restore the keypoint scale + keypoints = keypoints * self.scale_factor + + return keypoints, scores diff --git a/mmpose/codecs/probmap.py b/mmpose/codecs/probmap.py new file mode 100644 index 0000000000000000000000000000000000000000..91fe52e82aaaf8bb4a49fe25f45640def97a1d9b --- /dev/null +++ b/mmpose/codecs/probmap.py @@ -0,0 +1,212 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import cv2 +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_offset_heatmap, generate_udp_gaussian_heatmaps, + get_heatmap_maximum, refine_keypoints_dark_udp, generate_probmaps, get_heatmap_expected_value) + + +@KEYPOINT_CODECS.register_module() +class ProbMap(BaseKeypointCodec): + r"""Generate per-pixel expected OKS heatmaps for keypoint detection. + See the paper: `ProbPose: A Probabilistic Approach to 2D Human Pose Estimation` + by Purkrabek et al. (2025) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmap (np.ndarray): The generated OKS heatmap in shape (K, H, W) + where [W, H] is the `heatmap_size`, and K is the number of keypoints. + Each pixel value represents the expected OKS score if that pixel is + predicted as the keypoint location, given the ground truth location. + - keypoint_weights (np.ndarray): The target weights in shape (K,) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + heatmap_type (str): The heatmap type to encode the keypoints. Options + are: + + - ``'gaussian'``: Gaussian heatmap + - ``'combined'``: Combination of a binary label map and offset + maps for X and Y axes. + + sigma (float): The sigma value of the Gaussian heatmap when + ``heatmap_type=='gaussian'``. Defaults to 2.0 + radius_factor (float): The radius factor of the binary label + map when ``heatmap_type=='combined'``. The positive region is + defined as the neighbor of the keypoint with the radius + :math:`r=radius_factor*max(W, H)`. Defaults to 0.0546875 + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. Defaults to 11 + + .. _`ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`: + https://arxiv.org/abs/2412.02254 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + heatmap_type: str = 'gaussian', + sigma: float = 2., + radius_factor: float = 0.0546875, + blur_kernel_size: int = 11, + increase_sigma_with_padding=False, + ) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.radius_factor = radius_factor + self.heatmap_type = heatmap_type + self.blur_kernel_size = blur_kernel_size + self.scale_factor = ((np.array(input_size) - 1) / + (np.array(heatmap_size) - 1)).astype(np.float32) + self.increase_sigma_with_padding = increase_sigma_with_padding + self.sigma = sigma + + if self.heatmap_type not in {'gaussian', 'combined'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + id_similarity: Optional[float] = 0.0, + keypoints_visibility: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + id_similarity (float): The usefulness of the identity information + for the whole pose. Defaults to 0.0 + keypoints_visibility (np.ndarray): The visibility bit for each + keypoint (N, K). Defaults to None + + Returns: + dict: + - heatmap (np.ndarray): The generated heatmap in shape + (C_out, H, W) where [W, H] is the `heatmap_size`, and the + C_out is the output channel number which depends on the + `heatmap_type`. If `heatmap_type=='gaussian'`, C_out equals to + keypoint number K; if `heatmap_type=='combined'`, C_out + equals to K*3 (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visibility is None: + keypoints_visibility = np.zeros(keypoints.shape[:2], dtype=np.float32) + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + + heatmaps, keypoint_weights = generate_probmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + keypoints_visibility=keypoints_visibility, + sigma=self.sigma, + increase_sigma_with_padding=self.increase_sigma_with_padding) + + annotated = keypoints_visible > 0 + + in_image = np.logical_and( + keypoints[:, :, 0] >= 0, + keypoints[:, :, 0] < self.input_size[0], + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] >= 0, + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] < self.input_size[1], + ) + + encoded = dict( + heatmaps=heatmaps, + keypoint_weights=keypoint_weights, + annotated=annotated, + in_image=in_image, + keypoints_scaled=keypoints, + heatmap_keypoints=keypoints / self.scale_factor, + identification_similarity=id_similarity, + ) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = encoded.copy() + W, H = self.heatmap_size + + if self.heatmap_type == 'gaussian': + + keypoints, scores = get_heatmap_expected_value(heatmaps) + + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None] + scores = scores[None] + + + elif self.heatmap_type == 'combined': + _K, H, W = heatmaps.shape + K = _K // 3 + + for cls_heatmap in heatmaps[::3]: + # Apply Gaussian blur on classification maps + ks = 2 * self.blur_kernel_size + 1 + cv2.GaussianBlur(cls_heatmap, (ks, ks), 0, cls_heatmap) + + # valid radius + radius = self.radius_factor * max(W, H) + + x_offset = heatmaps[1::3].flatten() * radius + y_offset = heatmaps[2::3].flatten() * radius + keypoints, scores = get_heatmap_maximum(heatmaps=heatmaps[::3]) + index = (keypoints[..., 0] + keypoints[..., 1] * W).flatten() + index += W * H * np.arange(0, K) + index = index.astype(int) + keypoints += np.stack((x_offset[index], y_offset[index]), axis=-1) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None].astype(np.float32) + scores = scores[None] + + keypoints = keypoints / [W - 1, H - 1] * self.input_size + + return keypoints, scores diff --git a/mmpose/codecs/regression_label.py b/mmpose/codecs/regression_label.py new file mode 100644 index 0000000000000000000000000000000000000000..74cd21b73dcadc5ad4df2a5f270da9e0a2ce3a68 --- /dev/null +++ b/mmpose/codecs/regression_label.py @@ -0,0 +1,108 @@ +# Copyright (c) OpenMMLab. All rights reserved. + +from typing import Optional, Tuple + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec + + +@KEYPOINT_CODECS.register_module() +class RegressionLabel(BaseKeypointCodec): + r"""Generate keypoint coordinates. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + + Encoded: + + - keypoint_labels (np.ndarray): The normalized regression labels in + shape (N, K, D) where D is 2 for 2d coordinates + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Input image size in [w, h] + + """ + + label_mapping_table = dict( + keypoint_labels='keypoint_labels', + keypoint_weights='keypoint_weights', + ) + + def __init__(self, input_size: Tuple[int, int]) -> None: + super().__init__() + + self.input_size = input_size + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encoding keypoints from input image space to normalized space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - keypoint_labels (np.ndarray): The normalized regression labels in + shape (N, K, D) where D is 2 for 2d coordinates + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + w, h = self.input_size + valid = ((keypoints >= 0) & + (keypoints <= [w - 1, h - 1])).all(axis=-1) & ( + keypoints_visible > 0.5) + + keypoint_labels = (keypoints / np.array([w, h])).astype(np.float32) + keypoint_weights = np.where(valid, 1., 0.).astype(np.float32) + + encoded = dict( + keypoint_labels=keypoint_labels, keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from normalized space to input image + space. + + Args: + encoded (np.ndarray): Coordinates in shape (N, K, D) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded coordinates in shape (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). + It usually represents the confidence of the keypoint prediction + """ + + if encoded.shape[-1] == 2: + N, K, _ = encoded.shape + normalized_coords = encoded.copy() + scores = np.ones((N, K), dtype=np.float32) + elif encoded.shape[-1] == 4: + # split coords and sigma if outputs contain output_sigma + normalized_coords = encoded[..., :2].copy() + output_sigma = encoded[..., 2:4].copy() + + scores = (1 - output_sigma).mean(axis=-1) + else: + raise ValueError( + 'Keypoint dimension should be 2 or 4 (with sigma), ' + f'but got {encoded.shape[-1]}') + + w, h = self.input_size + keypoints = normalized_coords * np.array([w, h]) + + return keypoints, scores diff --git a/mmpose/codecs/simcc_label.py b/mmpose/codecs/simcc_label.py new file mode 100644 index 0000000000000000000000000000000000000000..e83960faafbf6e0852ae0dbdd361989cbcfaa24b --- /dev/null +++ b/mmpose/codecs/simcc_label.py @@ -0,0 +1,311 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Optional, Tuple, Union + +import numpy as np + +from mmpose.codecs.utils import get_simcc_maximum +from mmpose.codecs.utils.refinement import refine_simcc_dark +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec + + +@KEYPOINT_CODECS.register_module() +class SimCCLabel(BaseKeypointCodec): + r"""Generate keypoint representation via "SimCC" approach. + See the paper: `SimCC: a Simple Coordinate Classification Perspective for + Human Pose Estimation`_ by Li et al (2022) for more details. + Old name: SimDR + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + + Encoded: + + - keypoint_x_labels (np.ndarray): The generated SimCC label for x-axis. + The label shape is (N, K, Wx) if ``smoothing_type=='gaussian'`` + and (N, K) if `smoothing_type=='standard'``, where + :math:`Wx=w*simcc_split_ratio` + - keypoint_y_labels (np.ndarray): The generated SimCC label for y-axis. + The label shape is (N, K, Wy) if ``smoothing_type=='gaussian'`` + and (N, K) if `smoothing_type=='standard'``, where + :math:`Wy=h*simcc_split_ratio` + - keypoint_weights (np.ndarray): The target weights in shape (N, K) + + Args: + input_size (tuple): Input image size in [w, h] + smoothing_type (str): The SimCC label smoothing strategy. Options are + ``'gaussian'`` and ``'standard'``. Defaults to ``'gaussian'`` + sigma (float | int | tuple): The sigma value in the Gaussian SimCC + label. Defaults to 6.0 + simcc_split_ratio (float): The ratio of the label size to the input + size. For example, if the input width is ``w``, the x label size + will be :math:`w*simcc_split_ratio`. Defaults to 2.0 + label_smooth_weight (float): Label Smoothing weight. Defaults to 0.0 + normalize (bool): Whether to normalize the heatmaps. Defaults to True. + use_dark (bool): Whether to use the DARK post processing. Defaults to + False. + decode_visibility (bool): Whether to decode the visibility. Defaults + to False. + decode_beta (float): The beta value for decoding visibility. Defaults + to 150.0. + + .. _`SimCC: a Simple Coordinate Classification Perspective for Human Pose + Estimation`: https://arxiv.org/abs/2107.03332 + """ + + label_mapping_table = dict( + keypoint_x_labels='keypoint_x_labels', + keypoint_y_labels='keypoint_y_labels', + keypoint_weights='keypoint_weights', + ) + + def __init__( + self, + input_size: Tuple[int, int], + smoothing_type: str = 'gaussian', + sigma: Union[float, int, Tuple[float]] = 6.0, + simcc_split_ratio: float = 2.0, + label_smooth_weight: float = 0.0, + normalize: bool = True, + use_dark: bool = False, + decode_visibility: bool = False, + decode_beta: float = 150.0, + ) -> None: + super().__init__() + + self.input_size = input_size + self.smoothing_type = smoothing_type + self.simcc_split_ratio = simcc_split_ratio + self.label_smooth_weight = label_smooth_weight + self.normalize = normalize + self.use_dark = use_dark + self.decode_visibility = decode_visibility + self.decode_beta = decode_beta + + if isinstance(sigma, (float, int)): + self.sigma = np.array([sigma, sigma]) + else: + self.sigma = np.array(sigma) + + if self.smoothing_type not in {'gaussian', 'standard'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `smoothing_type` value' + f'{self.smoothing_type}. Should be one of ' + '{"gaussian", "standard"}') + + if self.smoothing_type == 'gaussian' and self.label_smooth_weight > 0: + raise ValueError('Attribute `label_smooth_weight` is only ' + 'used for `standard` mode.') + + if self.label_smooth_weight < 0.0 or self.label_smooth_weight > 1.0: + raise ValueError('`label_smooth_weight` should be in range [0, 1]') + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encoding keypoints into SimCC labels. Note that the original + keypoint coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - keypoint_x_labels (np.ndarray): The generated SimCC label for + x-axis. + The label shape is (N, K, Wx) if ``smoothing_type=='gaussian'`` + and (N, K) if `smoothing_type=='standard'``, where + :math:`Wx=w*simcc_split_ratio` + - keypoint_y_labels (np.ndarray): The generated SimCC label for + y-axis. + The label shape is (N, K, Wy) if ``smoothing_type=='gaussian'`` + and (N, K) if `smoothing_type=='standard'``, where + :math:`Wy=h*simcc_split_ratio` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if self.smoothing_type == 'gaussian': + x_labels, y_labels, keypoint_weights = self._generate_gaussian( + keypoints, keypoints_visible) + elif self.smoothing_type == 'standard': + x_labels, y_labels, keypoint_weights = self._generate_standard( + keypoints, keypoints_visible) + else: + raise ValueError( + f'{self.__class__.__name__} got invalid `smoothing_type` value' + f'{self.smoothing_type}. Should be one of ' + '{"gaussian", "standard"}') + + encoded = dict( + keypoint_x_labels=x_labels, + keypoint_y_labels=y_labels, + keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, simcc_x: np.ndarray, + simcc_y: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from SimCC representations. The decoded + coordinates are in the input image space. + + Args: + encoded (Tuple[np.ndarray, np.ndarray]): SimCC labels for x-axis + and y-axis + simcc_x (np.ndarray): SimCC label for x-axis + simcc_y (np.ndarray): SimCC label for y-axis + + Returns: + tuple: + - keypoints (np.ndarray): Decoded coordinates in shape (N, K, D) + - socres (np.ndarray): The keypoint scores in shape (N, K). + It usually represents the confidence of the keypoint prediction + """ + + keypoints, scores = get_simcc_maximum(simcc_x, simcc_y) + + # Unsqueeze the instance dimension for single-instance results + if keypoints.ndim == 2: + keypoints = keypoints[None, :] + scores = scores[None, :] + + if self.use_dark: + x_blur = int((self.sigma[0] * 20 - 7) // 3) + y_blur = int((self.sigma[1] * 20 - 7) // 3) + x_blur -= int((x_blur % 2) == 0) + y_blur -= int((y_blur % 2) == 0) + keypoints[:, :, 0] = refine_simcc_dark(keypoints[:, :, 0], simcc_x, + x_blur) + keypoints[:, :, 1] = refine_simcc_dark(keypoints[:, :, 1], simcc_y, + y_blur) + + keypoints /= self.simcc_split_ratio + + if self.decode_visibility: + _, visibility = get_simcc_maximum( + simcc_x * self.decode_beta * self.sigma[0], + simcc_y * self.decode_beta * self.sigma[1], + apply_softmax=True) + return keypoints, (scores, visibility) + else: + return keypoints, scores + + def _map_coordinates( + self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray]: + """Mapping keypoint coordinates into SimCC space.""" + + keypoints_split = keypoints.copy() + keypoints_split = np.around(keypoints_split * self.simcc_split_ratio) + keypoints_split = keypoints_split.astype(np.int64) + keypoint_weights = keypoints_visible.copy() + + return keypoints_split, keypoint_weights + + def _generate_standard( + self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray, np.ndarray]: + """Encoding keypoints into SimCC labels with Standard Label Smoothing + strategy. + + Labels will be one-hot vectors if self.label_smooth_weight==0.0 + """ + + N, K, _ = keypoints.shape + w, h = self.input_size + W = np.around(w * self.simcc_split_ratio).astype(int) + H = np.around(h * self.simcc_split_ratio).astype(int) + + keypoints_split, keypoint_weights = self._map_coordinates( + keypoints, keypoints_visible) + + target_x = np.zeros((N, K, W), dtype=np.float32) + target_y = np.zeros((N, K, H), dtype=np.float32) + + for n, k in product(range(N), range(K)): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + # get center coordinates + mu_x, mu_y = keypoints_split[n, k].astype(np.int64) + + # detect abnormal coords and assign the weight 0 + if mu_x >= W or mu_y >= H or mu_x < 0 or mu_y < 0: + keypoint_weights[n, k] = 0 + continue + + if self.label_smooth_weight > 0: + target_x[n, k] = self.label_smooth_weight / (W - 1) + target_y[n, k] = self.label_smooth_weight / (H - 1) + + target_x[n, k, mu_x] = 1.0 - self.label_smooth_weight + target_y[n, k, mu_y] = 1.0 - self.label_smooth_weight + + return target_x, target_y, keypoint_weights + + def _generate_gaussian( + self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray, np.ndarray]: + """Encoding keypoints into SimCC labels with Gaussian Label Smoothing + strategy.""" + + N, K, _ = keypoints.shape + w, h = self.input_size + W = np.around(w * self.simcc_split_ratio).astype(int) + H = np.around(h * self.simcc_split_ratio).astype(int) + + keypoints_split, keypoint_weights = self._map_coordinates( + keypoints, keypoints_visible) + + target_x = np.zeros((N, K, W), dtype=np.float32) + target_y = np.zeros((N, K, H), dtype=np.float32) + + # 3-sigma rule + radius = self.sigma * 3 + + # xy grid + x = np.arange(0, W, 1, dtype=np.float32) + y = np.arange(0, H, 1, dtype=np.float32) + + for n, k in product(range(N), range(K)): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + mu = keypoints_split[n, k] + + # check that the gaussian has in-bounds part + left, top = mu - radius + right, bottom = mu + radius + 1 + + if left >= W or top >= H or right < 0 or bottom < 0: + keypoint_weights[n, k] = 0 + continue + + mu_x, mu_y = mu + + target_x[n, k] = np.exp(-((x - mu_x)**2) / (2 * self.sigma[0]**2)) + target_y[n, k] = np.exp(-((y - mu_y)**2) / (2 * self.sigma[1]**2)) + + if self.normalize: + norm_value = self.sigma * np.sqrt(np.pi * 2) + target_x /= norm_value[0] + target_y /= norm_value[1] + + return target_x, target_y, keypoint_weights diff --git a/mmpose/codecs/spr.py b/mmpose/codecs/spr.py new file mode 100644 index 0000000000000000000000000000000000000000..fba17f15982f1b38ac07bf5f6d61bfec0286a660 --- /dev/null +++ b/mmpose/codecs/spr.py @@ -0,0 +1,306 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple, Union + +import numpy as np +import torch +from torch import Tensor + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (batch_heatmap_nms, generate_displacement_heatmap, + generate_gaussian_heatmaps, get_diagonal_lengths, + get_instance_root) + + +@KEYPOINT_CODECS.register_module() +class SPR(BaseKeypointCodec): + """Encode/decode keypoints with Structured Pose Representation (SPR). + + See the paper `Single-stage multi-person pose machines`_ + by Nie et al (2017) for details + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmaps (np.ndarray): The generated heatmap in shape (1, H, W) + where [W, H] is the `heatmap_size`. If the keypoint heatmap is + generated together, the output heatmap shape is (K+1, H, W) + - heatmap_weights (np.ndarray): The target weights for heatmaps which + has same shape with heatmaps. + - displacements (np.ndarray): The dense keypoint displacement in + shape (K*2, H, W). + - displacement_weights (np.ndarray): The target weights for heatmaps + which has same shape with displacements. + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + sigma (float or tuple, optional): The sigma values of the Gaussian + heatmaps. If sigma is a tuple, it includes both sigmas for root + and keypoint heatmaps. ``None`` means the sigmas are computed + automatically from the heatmap size. Defaults to ``None`` + generate_keypoint_heatmaps (bool): Whether to generate Gaussian + heatmaps for each keypoint. Defaults to ``False`` + root_type (str): The method to generate the instance root. Options + are: + + - ``'kpt_center'``: Average coordinate of all visible keypoints. + - ``'bbox_center'``: Center point of bounding boxes outlined by + all visible keypoints. + + Defaults to ``'kpt_center'`` + + minimal_diagonal_length (int or float): The threshold of diagonal + length of instance bounding box. Small instances will not be + used in training. Defaults to 32 + background_weight (float): Loss weight of background pixels. + Defaults to 0.1 + decode_thr (float): The threshold of keypoint response value in + heatmaps. Defaults to 0.01 + decode_nms_kernel (int): The kernel size of the NMS during decoding, + which should be an odd integer. Defaults to 5 + decode_max_instances (int): The maximum number of instances + to decode. Defaults to 30 + + .. _`Single-stage multi-person pose machines`: + https://arxiv.org/abs/1908.09220 + """ + + field_mapping_table = dict( + heatmaps='heatmaps', + heatmap_weights='heatmap_weights', + displacements='displacements', + displacement_weights='displacement_weights', + ) + + def __init__( + self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + sigma: Optional[Union[float, Tuple[float]]] = None, + generate_keypoint_heatmaps: bool = False, + root_type: str = 'kpt_center', + minimal_diagonal_length: Union[int, float] = 5, + background_weight: float = 0.1, + decode_nms_kernel: int = 5, + decode_max_instances: int = 30, + decode_thr: float = 0.01, + ): + super().__init__() + + self.input_size = input_size + self.heatmap_size = heatmap_size + self.generate_keypoint_heatmaps = generate_keypoint_heatmaps + self.root_type = root_type + self.minimal_diagonal_length = minimal_diagonal_length + self.background_weight = background_weight + self.decode_nms_kernel = decode_nms_kernel + self.decode_max_instances = decode_max_instances + self.decode_thr = decode_thr + + self.scale_factor = (np.array(input_size) / + heatmap_size).astype(np.float32) + + if sigma is None: + sigma = (heatmap_size[0] * heatmap_size[1])**0.5 / 32 + if generate_keypoint_heatmaps: + # sigma for root heatmap and keypoint heatmaps + self.sigma = (sigma, sigma // 2) + else: + self.sigma = (sigma, ) + else: + if not isinstance(sigma, (tuple, list)): + sigma = (sigma, ) + if generate_keypoint_heatmaps: + assert len(sigma) == 2, 'sigma for keypoints must be given ' \ + 'if `generate_keypoint_heatmaps` ' \ + 'is True. e.g. sigma=(4, 2)' + self.sigma = sigma + + def _get_heatmap_weights(self, + heatmaps, + fg_weight: float = 1, + bg_weight: float = 0): + """Generate weight array for heatmaps. + + Args: + heatmaps (np.ndarray): Root and keypoint (optional) heatmaps + fg_weight (float): Weight for foreground pixels. Defaults to 1.0 + bg_weight (float): Weight for background pixels. Defaults to 0.0 + + Returns: + np.ndarray: Heatmap weight array in the same shape with heatmaps + """ + heatmap_weights = np.ones(heatmaps.shape, dtype=np.float32) * bg_weight + heatmap_weights[heatmaps > 0] = fg_weight + return heatmap_weights + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into root heatmaps and keypoint displacement + fields. Note that the original keypoint coordinates should be in the + input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - heatmaps (np.ndarray): The generated heatmap in shape + (1, H, W) where [W, H] is the `heatmap_size`. If keypoint + heatmaps are generated together, the shape is (K+1, H, W) + - heatmap_weights (np.ndarray): The pixel-wise weight for heatmaps + which has same shape with `heatmaps` + - displacements (np.ndarray): The generated displacement fields in + shape (K*D, H, W). The vector on each pixels represents the + displacement of keypoints belong to the associated instance + from this pixel. + - displacement_weights (np.ndarray): The pixel-wise weight for + displacements which has same shape with `displacements` + """ + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + # keypoint coordinates in heatmap + _keypoints = keypoints / self.scale_factor + + # compute the root and scale of each instance + roots, roots_visible = get_instance_root(_keypoints, keypoints_visible, + self.root_type) + diagonal_lengths = get_diagonal_lengths(_keypoints, keypoints_visible) + + # discard the small instances + roots_visible[diagonal_lengths < self.minimal_diagonal_length] = 0 + + # generate heatmaps + heatmaps, _ = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=roots[:, None], + keypoints_visible=roots_visible[:, None], + sigma=self.sigma[0]) + heatmap_weights = self._get_heatmap_weights( + heatmaps, bg_weight=self.background_weight) + + if self.generate_keypoint_heatmaps: + keypoint_heatmaps, _ = generate_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=_keypoints, + keypoints_visible=keypoints_visible, + sigma=self.sigma[1]) + + keypoint_heatmaps_weights = self._get_heatmap_weights( + keypoint_heatmaps, bg_weight=self.background_weight) + + heatmaps = np.concatenate((keypoint_heatmaps, heatmaps), axis=0) + heatmap_weights = np.concatenate( + (keypoint_heatmaps_weights, heatmap_weights), axis=0) + + # generate displacements + displacements, displacement_weights = \ + generate_displacement_heatmap( + self.heatmap_size, + _keypoints, + keypoints_visible, + roots, + roots_visible, + diagonal_lengths, + self.sigma[0], + ) + + encoded = dict( + heatmaps=heatmaps, + heatmap_weights=heatmap_weights, + displacements=displacements, + displacement_weights=displacement_weights) + + return encoded + + def decode(self, heatmaps: Tensor, + displacements: Tensor) -> Tuple[np.ndarray, np.ndarray]: + """Decode the keypoint coordinates from heatmaps and displacements. The + decoded keypoint coordinates are in the input image space. + + Args: + heatmaps (Tensor): Encoded root and keypoints (optional) heatmaps + in shape (1, H, W) or (K+1, H, W) + displacements (Tensor): Encoded keypoints displacement fields + in shape (K*D, H, W) + + Returns: + tuple: + - keypoints (Tensor): Decoded keypoint coordinates in shape + (N, K, D) + - scores (tuple): + - root_scores (Tensor): The root scores in shape (N, ) + - keypoint_scores (Tensor): The keypoint scores in + shape (N, K). If keypoint heatmaps are not generated, + `keypoint_scores` will be `None` + """ + # heatmaps, displacements = encoded + _k, h, w = displacements.shape + k = _k // 2 + displacements = displacements.view(k, 2, h, w) + + # convert displacements to a dense keypoint prediction + y, x = torch.meshgrid(torch.arange(h), torch.arange(w)) + regular_grid = torch.stack([x, y], dim=0).to(displacements) + posemaps = (regular_grid[None] + displacements).flatten(2) + + # find local maximum on root heatmap + root_heatmap_peaks = batch_heatmap_nms(heatmaps[None, -1:], + self.decode_nms_kernel) + root_scores, pos_idx = root_heatmap_peaks.flatten().topk( + self.decode_max_instances) + mask = root_scores > self.decode_thr + root_scores, pos_idx = root_scores[mask], pos_idx[mask] + + keypoints = posemaps[:, :, pos_idx].permute(2, 0, 1).contiguous() + + if self.generate_keypoint_heatmaps and heatmaps.shape[0] == 1 + k: + # compute scores for each keypoint + keypoint_scores = self.get_keypoint_scores(heatmaps[:k], keypoints) + else: + keypoint_scores = None + + keypoints = torch.cat([ + kpt * self.scale_factor[i] + for i, kpt in enumerate(keypoints.split(1, -1)) + ], + dim=-1) + return keypoints, (root_scores, keypoint_scores) + + def get_keypoint_scores(self, heatmaps: Tensor, keypoints: Tensor): + """Calculate the keypoint scores with keypoints heatmaps and + coordinates. + + Args: + heatmaps (Tensor): Keypoint heatmaps in shape (K, H, W) + keypoints (Tensor): Keypoint coordinates in shape (N, K, D) + + Returns: + Tensor: Keypoint scores in [N, K] + """ + k, h, w = heatmaps.shape + keypoints = torch.stack(( + keypoints[..., 0] / (w - 1) * 2 - 1, + keypoints[..., 1] / (h - 1) * 2 - 1, + ), + dim=-1) + keypoints = keypoints.transpose(0, 1).unsqueeze(1).contiguous() + + keypoint_scores = torch.nn.functional.grid_sample( + heatmaps.unsqueeze(1), keypoints, + padding_mode='border').view(k, -1).transpose(0, 1).contiguous() + + return keypoint_scores diff --git a/mmpose/codecs/udp_expmax_heatmap.py b/mmpose/codecs/udp_expmax_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..19fb890db8573a810c21a721d14ee5abe3dcbf8f --- /dev/null +++ b/mmpose/codecs/udp_expmax_heatmap.py @@ -0,0 +1,241 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import cv2 +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_offset_heatmap, generate_udp_gaussian_heatmaps, + get_heatmap_maximum, refine_keypoints_dark_udp, get_heatmap_expected_value) + + +@KEYPOINT_CODECS.register_module() +class UDPExpMaxHeatmap(BaseKeypointCodec): + r"""Generate keypoint heatmaps by Unbiased Data Processing (UDP) and decode them + using expected value estimation. See the papers: + - `The Devil is in the Details: Delving into Unbiased Data Processing for Human + Pose Estimation`_ by Huang et al (2020) + - `ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`_ by + Purkrabek et al (2025) + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmap (np.ndarray): The generated heatmap in shape (C_out, H, W) + where [W, H] is the `heatmap_size`, and the C_out is the output + channel number which depends on the `heatmap_type`. If + `heatmap_type=='gaussian'`, C_out equals to keypoint number K; + if `heatmap_type=='combined'`, C_out equals to K*3 + (x_offset, y_offset and class label). During decoding, keypoint + locations are estimated as the expected value over the heatmap + probability distribution. + - keypoint_weights (np.ndarray): The target weights in shape (K,) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + heatmap_type (str): The heatmap type to encode the keypoints. Options + are: + + - ``'gaussian'``: Gaussian heatmap + - ``'combined'``: Combination of a binary label map and offset + maps for X and Y axes. + + sigma (float): The sigma value of the Gaussian heatmap when + ``heatmap_type=='gaussian'``. Defaults to 2.0 + radius_factor (float): The radius factor of the binary label + map when ``heatmap_type=='combined'``. The positive region is + defined as the neighbor of the keypoint with the radius + :math:`r=radius_factor*max(W, H)`. Defaults to 0.0546875 + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. Defaults to 11 + + .. _`The Devil is in the Details: Delving into Unbiased Data Processing for + Human Pose Estimation`: https://arxiv.org/abs/1911.07524 + .. _`ProbPose: A Probabilistic Approach to 2D Human Pose Estimation`: + https://arxiv.org/abs/2412.02254 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + heatmap_type: str = 'gaussian', + sigma: float = 2., + radius_factor: float = 0.0546875, + blur_kernel_size: int = 11, + increase_sigma_with_padding=False, + normalize=False, + parzen_size=0.1, + ) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.sigma = sigma + self.radius_factor = radius_factor + self.heatmap_type = heatmap_type + self.blur_kernel_size = blur_kernel_size + self.scale_factor = ((np.array(input_size) - 1) / + (np.array(heatmap_size) - 1)).astype(np.float32) + self.increase_sigma_with_padding = increase_sigma_with_padding + self.normalize = normalize + self.parzen_size = parzen_size + + if self.heatmap_type not in {'gaussian', 'combined'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + id_similarity: Optional[float] = 0.0, + keypoints_visibility: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + id_similarity (float): The usefulness of the identity information + for the whole pose. Defaults to 0.0 + keypoints_visibility (np.ndarray): The visibility bit for each + keypoint (N, K). Defaults to None + + Returns: + dict: + - heatmap (np.ndarray): The generated heatmap in shape + (C_out, H, W) where [W, H] is the `heatmap_size`, and the + C_out is the output channel number which depends on the + `heatmap_type`. If `heatmap_type=='gaussian'`, C_out equals to + keypoint number K; if `heatmap_type=='combined'`, C_out + equals to K*3 (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visibility is None: + keypoints_visibility = np.zeros(keypoints.shape[:2], dtype=np.float32) + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if self.heatmap_type == 'gaussian': + heatmaps, keypoint_weights = generate_udp_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + sigma=self.sigma, + keypoints_visibility=keypoints_visibility, + increase_sigma_with_padding=self.increase_sigma_with_padding) + elif self.heatmap_type == 'combined': + heatmaps, keypoint_weights = generate_offset_heatmap( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + radius_factor=self.radius_factor) + else: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + if self.normalize: + heatmaps_sum = np.sum(heatmaps, axis=(1, 2), keepdims=False) + mask = heatmaps_sum > 0 + heatmaps[mask, :, :] = heatmaps[mask, :, :] / (heatmaps_sum[mask, None, None] + np.finfo(np.float32).eps) + + annotated = keypoints_visible > 0 + + in_image = np.logical_and( + keypoints[:, :, 0] >= 0, + keypoints[:, :, 0] < self.input_size[0], + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] >= 0, + ) + in_image = np.logical_and( + in_image, + keypoints[:, :, 1] < self.input_size[1], + ) + + encoded = dict( + heatmaps=heatmaps, + keypoint_weights=keypoint_weights, + annotated=annotated, + in_image=in_image, + keypoints_scaled=keypoints, + identification_similarity=id_similarity, + ) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = encoded.copy() + + if self.heatmap_type == 'gaussian': + keypoints, scores = get_heatmap_expected_value( + heatmaps, + parzen_size=self.parzen_size, + ) + + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None] + scores = scores[None] + + elif self.heatmap_type == 'combined': + _K, H, W = heatmaps.shape + K = _K // 3 + + for cls_heatmap in heatmaps[::3]: + # Apply Gaussian blur on classification maps + ks = 2 * self.blur_kernel_size + 1 + cv2.GaussianBlur(cls_heatmap, (ks, ks), 0, cls_heatmap) + + # valid radius + radius = self.radius_factor * max(W, H) + + x_offset = heatmaps[1::3].flatten() * radius + y_offset = heatmaps[2::3].flatten() * radius + keypoints, scores = get_heatmap_maximum(heatmaps=heatmaps[::3]) + index = (keypoints[..., 0] + keypoints[..., 1] * W).flatten() + index += W * H * np.arange(0, K) + index = index.astype(int) + keypoints += np.stack((x_offset[index], y_offset[index]), axis=-1) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None].astype(np.float32) + scores = scores[None] + + W, H = self.heatmap_size + keypoints = keypoints / [W - 1, H - 1] * self.input_size + + return keypoints, scores diff --git a/mmpose/codecs/udp_heatmap.py b/mmpose/codecs/udp_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..7e7e341e19636f2aedacbceff3803e3e612db111 --- /dev/null +++ b/mmpose/codecs/udp_heatmap.py @@ -0,0 +1,188 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional, Tuple + +import cv2 +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec +from .utils import (generate_offset_heatmap, generate_udp_gaussian_heatmaps, + get_heatmap_maximum, refine_keypoints_dark_udp) + + +@KEYPOINT_CODECS.register_module() +class UDPHeatmap(BaseKeypointCodec): + r"""Generate keypoint heatmaps by Unbiased Data Processing (UDP). + See the paper: `The Devil is in the Details: Delving into Unbiased Data + Processing for Human Pose Estimation`_ by Huang et al (2020) for details. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - image size: [w, h] + - heatmap size: [W, H] + + Encoded: + + - heatmap (np.ndarray): The generated heatmap in shape (C_out, H, W) + where [W, H] is the `heatmap_size`, and the C_out is the output + channel number which depends on the `heatmap_type`. If + `heatmap_type=='gaussian'`, C_out equals to keypoint number K; + if `heatmap_type=='combined'`, C_out equals to K*3 + (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape (K,) + + Args: + input_size (tuple): Image size in [w, h] + heatmap_size (tuple): Heatmap size in [W, H] + heatmap_type (str): The heatmap type to encode the keypoitns. Options + are: + + - ``'gaussian'``: Gaussian heatmap + - ``'combined'``: Combination of a binary label map and offset + maps for X and Y axes. + + sigma (float): The sigma value of the Gaussian heatmap when + ``heatmap_type=='gaussian'``. Defaults to 2.0 + radius_factor (float): The radius factor of the binary label + map when ``heatmap_type=='combined'``. The positive region is + defined as the neighbor of the keypoit with the radius + :math:`r=radius_factor*max(W, H)`. Defaults to 0.0546875 + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation in DarkPose. Defaults to 11 + + .. _`The Devil is in the Details: Delving into Unbiased Data Processing for + Human Pose Estimation`: https://arxiv.org/abs/1911.07524 + """ + + label_mapping_table = dict(keypoint_weights='keypoint_weights', ) + field_mapping_table = dict(heatmaps='heatmaps', ) + + def __init__(self, + input_size: Tuple[int, int], + heatmap_size: Tuple[int, int], + heatmap_type: str = 'gaussian', + sigma: float = 2., + radius_factor: float = 0.0546875, + blur_kernel_size: int = 11) -> None: + super().__init__() + self.input_size = input_size + self.heatmap_size = heatmap_size + self.sigma = sigma + self.radius_factor = radius_factor + self.heatmap_type = heatmap_type + self.blur_kernel_size = blur_kernel_size + self.scale_factor = ((np.array(input_size) - 1) / + (np.array(heatmap_size) - 1)).astype(np.float32) + + if self.heatmap_type not in {'gaussian', 'combined'}: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None) -> dict: + """Encode keypoints into heatmaps. Note that the original keypoint + coordinates should be in the input image space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + dict: + - heatmap (np.ndarray): The generated heatmap in shape + (C_out, H, W) where [W, H] is the `heatmap_size`, and the + C_out is the output channel number which depends on the + `heatmap_type`. If `heatmap_type=='gaussian'`, C_out equals to + keypoint number K; if `heatmap_type=='combined'`, C_out + equals to K*3 (x_offset, y_offset and class label) + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + assert keypoints.shape[0] == 1, ( + f'{self.__class__.__name__} only support single-instance ' + 'keypoint encoding') + + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if self.heatmap_type == 'gaussian': + heatmaps, keypoint_weights = generate_udp_gaussian_heatmaps( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + sigma=self.sigma) + elif self.heatmap_type == 'combined': + heatmaps, keypoint_weights = generate_offset_heatmap( + heatmap_size=self.heatmap_size, + keypoints=keypoints / self.scale_factor, + keypoints_visible=keypoints_visible, + radius_factor=self.radius_factor) + else: + raise ValueError( + f'{self.__class__.__name__} got invalid `heatmap_type` value' + f'{self.heatmap_type}. Should be one of ' + '{"gaussian", "combined"}') + + encoded = dict(heatmaps=heatmaps, keypoint_weights=keypoint_weights) + + return encoded + + def decode(self, encoded: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from heatmaps. The decoded keypoint + coordinates are in the input image space. + + Args: + encoded (np.ndarray): Heatmaps in shape (K, H, W) + + Returns: + tuple: + - keypoints (np.ndarray): Decoded keypoint coordinates in shape + (N, K, D) + - scores (np.ndarray): The keypoint scores in shape (N, K). It + usually represents the confidence of the keypoint prediction + """ + heatmaps = encoded.copy() + + if self.heatmap_type == 'gaussian': + keypoints, scores = get_heatmap_maximum(heatmaps) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None] + scores = scores[None] + + keypoints = refine_keypoints_dark_udp( + keypoints, heatmaps, blur_kernel_size=self.blur_kernel_size) + + elif self.heatmap_type == 'combined': + _K, H, W = heatmaps.shape + K = _K // 3 + + for cls_heatmap in heatmaps[::3]: + # Apply Gaussian blur on classification maps + ks = 2 * self.blur_kernel_size + 1 + cv2.GaussianBlur(cls_heatmap, (ks, ks), 0, cls_heatmap) + + # valid radius + radius = self.radius_factor * max(W, H) + + x_offset = heatmaps[1::3].flatten() * radius + y_offset = heatmaps[2::3].flatten() * radius + keypoints, scores = get_heatmap_maximum(heatmaps=heatmaps[::3]) + index = (keypoints[..., 0] + keypoints[..., 1] * W).flatten() + index += W * H * np.arange(0, K) + index = index.astype(int) + keypoints += np.stack((x_offset[index], y_offset[index]), axis=-1) + # unsqueeze the instance dimension for single-instance results + keypoints = keypoints[None].astype(np.float32) + scores = scores[None] + + W, H = self.heatmap_size + keypoints = keypoints / [W - 1, H - 1] * self.input_size + + return keypoints, scores diff --git a/mmpose/codecs/utils/__init__.py b/mmpose/codecs/utils/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..25c51081d843186e7bd41ab34cba27be76715210 --- /dev/null +++ b/mmpose/codecs/utils/__init__.py @@ -0,0 +1,31 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .camera_image_projection import (camera_to_image_coord, camera_to_pixel, + pixel_to_camera) +from .gaussian_heatmap import (generate_3d_gaussian_heatmaps, + generate_gaussian_heatmaps, + generate_udp_gaussian_heatmaps, + generate_unbiased_gaussian_heatmaps) +from .instance_property import (get_diagonal_lengths, get_instance_bbox, + get_instance_root) +from .offset_heatmap import (generate_displacement_heatmap, + generate_offset_heatmap) +from .post_processing import (batch_heatmap_nms, gaussian_blur, + gaussian_blur1d, get_heatmap_3d_maximum, + get_heatmap_maximum, get_simcc_maximum, + get_simcc_normalized, get_heatmap_expected_value) +from .refinement import (refine_keypoints, refine_keypoints_dark, + refine_keypoints_dark_udp, refine_simcc_dark) +from .oks_map import generate_probmaps + +__all__ = [ + 'generate_gaussian_heatmaps', 'generate_udp_gaussian_heatmaps', + 'generate_unbiased_gaussian_heatmaps', 'gaussian_blur', + 'get_heatmap_maximum', 'get_simcc_maximum', 'generate_offset_heatmap', + 'batch_heatmap_nms', 'refine_keypoints', 'refine_keypoints_dark', + 'refine_keypoints_dark_udp', 'generate_displacement_heatmap', + 'refine_simcc_dark', 'gaussian_blur1d', 'get_diagonal_lengths', + 'get_instance_root', 'get_instance_bbox', 'get_simcc_normalized', + 'camera_to_image_coord', 'camera_to_pixel', 'pixel_to_camera', + 'get_heatmap_3d_maximum', 'generate_3d_gaussian_heatmaps', + 'generate_probmaps', 'get_heatmap_expected_value' +] diff --git a/mmpose/codecs/utils/camera_image_projection.py b/mmpose/codecs/utils/camera_image_projection.py new file mode 100644 index 0000000000000000000000000000000000000000..b26d1396f1d054b1f36fd50df4c469d6201f12e6 --- /dev/null +++ b/mmpose/codecs/utils/camera_image_projection.py @@ -0,0 +1,102 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Dict, Tuple + +import numpy as np + + +def camera_to_image_coord(root_index: int, kpts_3d_cam: np.ndarray, + camera_param: Dict) -> Tuple[np.ndarray, np.ndarray]: + """Project keypoints from camera space to image space and calculate factor. + + Args: + root_index (int): Index for root keypoint. + kpts_3d_cam (np.ndarray): Keypoint coordinates in camera space in + shape (N, K, D). + camera_param (dict): Parameters for the camera. + + Returns: + tuple: + - kpts_3d_image (np.ndarray): Keypoint coordinates in image space in + shape (N, K, D). + - factor (np.ndarray): The scaling factor that maps keypoints from + image space to camera space in shape (N, ). + """ + + root = kpts_3d_cam[..., root_index, :] + tl_kpt = root.copy() + tl_kpt[..., :2] -= 1.0 + br_kpt = root.copy() + br_kpt[..., :2] += 1.0 + tl_kpt = np.reshape(tl_kpt, (-1, 3)) + br_kpt = np.reshape(br_kpt, (-1, 3)) + fx, fy = camera_param['f'] / 1000. + cx, cy = camera_param['c'] / 1000. + + tl2d = camera_to_pixel(tl_kpt, fx, fy, cx, cy) + br2d = camera_to_pixel(br_kpt, fx, fy, cx, cy) + + rectangle_3d_size = 2.0 + kpts_3d_image = np.zeros_like(kpts_3d_cam) + kpts_3d_image[..., :2] = camera_to_pixel(kpts_3d_cam.copy(), fx, fy, cx, + cy) + ratio = (br2d[..., 0] - tl2d[..., 0] + 0.001) / rectangle_3d_size + factor = rectangle_3d_size / (br2d[..., 0] - tl2d[..., 0] + 0.001) + kpts_3d_depth = ratio[:, None] * ( + kpts_3d_cam[..., 2] - kpts_3d_cam[..., root_index:root_index + 1, 2]) + kpts_3d_image[..., 2] = kpts_3d_depth + return kpts_3d_image, factor + + +def camera_to_pixel(kpts_3d: np.ndarray, + fx: float, + fy: float, + cx: float, + cy: float, + shift: bool = False) -> np.ndarray: + """Project keypoints from camera space to image space. + + Args: + kpts_3d (np.ndarray): Keypoint coordinates in camera space. + fx (float): x-coordinate of camera's focal length. + fy (float): y-coordinate of camera's focal length. + cx (float): x-coordinate of image center. + cy (float): y-coordinate of image center. + shift (bool): Whether to shift the coordinates by 1e-8. + + Returns: + pose_2d (np.ndarray): Projected keypoint coordinates in image space. + """ + if not shift: + pose_2d = kpts_3d[..., :2] / kpts_3d[..., 2:3] + else: + pose_2d = kpts_3d[..., :2] / (kpts_3d[..., 2:3] + 1e-8) + pose_2d[..., 0] *= fx + pose_2d[..., 1] *= fy + pose_2d[..., 0] += cx + pose_2d[..., 1] += cy + return pose_2d + + +def pixel_to_camera(kpts_3d: np.ndarray, fx: float, fy: float, cx: float, + cy: float) -> np.ndarray: + """Project keypoints from camera space to image space. + + Args: + kpts_3d (np.ndarray): Keypoint coordinates in camera space. + fx (float): x-coordinate of camera's focal length. + fy (float): y-coordinate of camera's focal length. + cx (float): x-coordinate of image center. + cy (float): y-coordinate of image center. + shift (bool): Whether to shift the coordinates by 1e-8. + + Returns: + pose_2d (np.ndarray): Projected keypoint coordinates in image space. + """ + pose_2d = kpts_3d.copy() + pose_2d[..., 0] -= cx + pose_2d[..., 1] -= cy + pose_2d[..., 0] /= fx + pose_2d[..., 1] /= fy + pose_2d[..., 0] *= kpts_3d[..., 2] + pose_2d[..., 1] *= kpts_3d[..., 2] + return pose_2d diff --git a/mmpose/codecs/utils/gaussian_heatmap.py b/mmpose/codecs/utils/gaussian_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..f8deeb8d9db203284148fbd51421eca0aee2b101 --- /dev/null +++ b/mmpose/codecs/utils/gaussian_heatmap.py @@ -0,0 +1,339 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Optional, Tuple, Union + +import numpy as np + + +def generate_3d_gaussian_heatmaps( + heatmap_size: Tuple[int, int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + sigma: Union[float, Tuple[float], np.ndarray], + image_size: Tuple[int, int], + heatmap3d_depth_bound: float = 400.0, + joint_indices: Optional[list] = None, + max_bound: float = 1.0, + use_different_joint_weights: bool = False, + dataset_keypoint_weights: Optional[np.ndarray] = None +) -> Tuple[np.ndarray, np.ndarray]: + """Generate 3d gaussian heatmaps of keypoints. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H, D] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, C) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + sigma (float or List[float]): A list of sigma values of the Gaussian + heatmap for each instance. If sigma is given as a single float + value, it will be expanded into a tuple + image_size (Tuple[int, int]): Size of input image. + heatmap3d_depth_bound (float): Boundary for 3d heatmap depth. + Default: 400.0. + joint_indices (List[int], optional): Indices of joints used for heatmap + generation. If None (default) is given, all joints will be used. + Default: ``None``. + max_bound (float): The maximal value of heatmap. Default: 1.0. + use_different_joint_weights (bool): Whether to use different joint + weights. Default: ``False``. + dataset_keypoint_weights (np.ndarray, optional): Keypoints weight in + shape (K, ). + + Returns: + tuple: + - heatmaps (np.ndarray): The generated heatmap in shape + (K * D, H, W) where [W, H, D] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + + W, H, D = heatmap_size + + # select the joints used for target generation + if joint_indices is not None: + keypoints = keypoints[:, joint_indices, ...] + keypoints_visible = keypoints_visible[:, joint_indices, ...] + N, K, _ = keypoints.shape + + heatmaps = np.zeros([K, D, H, W], dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + if isinstance(sigma, (int, float)): + sigma = (sigma, ) * N + + for n in range(N): + # 3-sigma rule + radius = sigma[n] * 3 + + # joint location in heatmap coordinates + mu_x = keypoints[n, :, 0] * W / image_size[0] # (K, ) + mu_y = keypoints[n, :, 1] * H / image_size[1] + mu_z = (keypoints[n, :, 2] / heatmap3d_depth_bound + 0.5) * D + + keypoint_weights[n, ...] = keypoint_weights[n, ...] * (mu_z >= 0) * ( + mu_z < D) + if use_different_joint_weights: + keypoint_weights[ + n] = keypoint_weights[n] * dataset_keypoint_weights + # xy grid + gaussian_size = 2 * radius + 1 + + # get neighboring voxels coordinates + x = y = z = np.arange(gaussian_size, dtype=np.float32) - radius + zz, yy, xx = np.meshgrid(z, y, x) + + xx = np.expand_dims(xx, axis=0) + yy = np.expand_dims(yy, axis=0) + zz = np.expand_dims(zz, axis=0) + mu_x = np.expand_dims(mu_x, axis=(-1, -2, -3)) + mu_y = np.expand_dims(mu_y, axis=(-1, -2, -3)) + mu_z = np.expand_dims(mu_z, axis=(-1, -2, -3)) + + xx, yy, zz = xx + mu_x, yy + mu_y, zz + mu_z + local_size = xx.shape[1] + + # round the coordinates + xx = xx.round().clip(0, W - 1) + yy = yy.round().clip(0, H - 1) + zz = zz.round().clip(0, D - 1) + + # compute the target value near joints + gaussian = np.exp(-((xx - mu_x)**2 + (yy - mu_y)**2 + (zz - mu_z)**2) / + (2 * sigma[n]**2)) + + # put the local target value to the full target heatmap + idx_joints = np.tile( + np.expand_dims(np.arange(K), axis=(-1, -2, -3)), + [1, local_size, local_size, local_size]) + idx = np.stack([idx_joints, zz, yy, xx], + axis=-1).astype(int).reshape(-1, 4) + + heatmaps[idx[:, 0], idx[:, 1], idx[:, 2], idx[:, 3]] = np.maximum( + heatmaps[idx[:, 0], idx[:, 1], idx[:, 2], idx[:, 3]], + gaussian.reshape(-1)) + + heatmaps = (heatmaps * max_bound).reshape(-1, H, W) + + return heatmaps, keypoint_weights + + +def generate_gaussian_heatmaps( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + sigma: Union[float, Tuple[float], np.ndarray], +) -> Tuple[np.ndarray, np.ndarray]: + """Generate gaussian heatmaps of keypoints. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + sigma (float or List[float]): A list of sigma values of the Gaussian + heatmap for each instance. If sigma is given as a single float + value, it will be expanded into a tuple + + Returns: + tuple: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + """ + + N, K, _ = keypoints.shape + W, H = heatmap_size + + heatmaps = np.zeros((K, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + if isinstance(sigma, (int, float)): + sigma = (sigma, ) * N + + for n in range(N): + # 3-sigma rule + radius = sigma[n] * 3 + + # xy grid + gaussian_size = 2 * radius + 1 + x = np.arange(0, gaussian_size, 1, dtype=np.float32) + y = x[:, None] + x0 = y0 = gaussian_size // 2 + + for k in range(K): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + # get gaussian center coordinates + mu = (keypoints[n, k] + 0.5).astype(np.int64) + + # check that the gaussian has in-bounds part + left, top = (mu - radius).astype(np.int64) + right, bottom = (mu + radius + 1).astype(np.int64) + + if left >= W or top >= H or right < 0 or bottom < 0: + keypoint_weights[n, k] = 0 + continue + + # The gaussian is not normalized, + # we want the center value to equal 1 + gaussian = np.exp(-((x - x0)**2 + (y - y0)**2) / (2 * sigma[n]**2)) + + # valid range in gaussian + g_x1 = max(0, -left) + g_x2 = min(W, right) - left + g_y1 = max(0, -top) + g_y2 = min(H, bottom) - top + + # valid range in heatmap + h_x1 = max(0, left) + h_x2 = min(W, right) + h_y1 = max(0, top) + h_y2 = min(H, bottom) + + heatmap_region = heatmaps[k, h_y1:h_y2, h_x1:h_x2] + gaussian_regsion = gaussian[g_y1:g_y2, g_x1:g_x2] + + _ = np.maximum( + heatmap_region, gaussian_regsion, out=heatmap_region) + + return heatmaps, keypoint_weights + + +def generate_unbiased_gaussian_heatmaps( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + sigma: float, +) -> Tuple[np.ndarray, np.ndarray]: + """Generate gaussian heatmaps of keypoints using `Dark Pose`_. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + tuple: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + + .. _`Dark Pose`: https://arxiv.org/abs/1910.06278 + """ + + N, K, _ = keypoints.shape + W, H = heatmap_size + + heatmaps = np.zeros((K, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + # 3-sigma rule + radius = sigma * 3 + + # xy grid + x = np.arange(0, W, 1, dtype=np.float32) + y = np.arange(0, H, 1, dtype=np.float32)[:, None] + + for n, k in product(range(N), range(K)): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + mu = keypoints[n, k] + # check that the gaussian has in-bounds part + left, top = mu - radius + right, bottom = mu + radius + 1 + + if left >= W or top >= H or right < 0 or bottom < 0: + keypoint_weights[n, k] = 0 + continue + + gaussian = np.exp(-((x - mu[0])**2 + (y - mu[1])**2) / (2 * sigma**2)) + + _ = np.maximum(gaussian, heatmaps[k], out=heatmaps[k]) + + return heatmaps, keypoint_weights + + +def generate_udp_gaussian_heatmaps( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + sigma: float, +) -> Tuple[np.ndarray, np.ndarray]: + """Generate gaussian heatmaps of keypoints using `UDP`_. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + sigma (float): The sigma value of the Gaussian heatmap + + Returns: + tuple: + - heatmaps (np.ndarray): The generated heatmap in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + + .. _`UDP`: https://arxiv.org/abs/1911.07524 + """ + + N, K, _ = keypoints.shape + W, H = heatmap_size + + heatmaps = np.zeros((K, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + # 3-sigma rule + radius = sigma * 3 + + # xy grid + gaussian_size = 2 * radius + 1 + x = np.arange(0, gaussian_size, 1, dtype=np.float32) + y = x[:, None] + + for n, k in product(range(N), range(K)): + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + mu = (keypoints[n, k] + 0.5).astype(np.int64) + # check that the gaussian has in-bounds part + left, top = (mu - radius).astype(np.int64) + right, bottom = (mu + radius + 1).astype(np.int64) + + if left >= W or top >= H or right < 0 or bottom < 0: + keypoint_weights[n, k] = 0 + continue + + mu_ac = keypoints[n, k] + x0 = y0 = gaussian_size // 2 + x0 += mu_ac[0] - mu[0] + y0 += mu_ac[1] - mu[1] + gaussian = np.exp(-((x - x0)**2 + (y - y0)**2) / (2 * sigma**2)) + + # valid range in gaussian + g_x1 = max(0, -left) + g_x2 = min(W, right) - left + g_y1 = max(0, -top) + g_y2 = min(H, bottom) - top + + # valid range in heatmap + h_x1 = max(0, left) + h_x2 = min(W, right) + h_y1 = max(0, top) + h_y2 = min(H, bottom) + + heatmap_region = heatmaps[k, h_y1:h_y2, h_x1:h_x2] + gaussian_regsion = gaussian[g_y1:g_y2, g_x1:g_x2] + + _ = np.maximum(heatmap_region, gaussian_regsion, out=heatmap_region) + + return heatmaps, keypoint_weights diff --git a/mmpose/codecs/utils/instance_property.py b/mmpose/codecs/utils/instance_property.py new file mode 100644 index 0000000000000000000000000000000000000000..15ae30aef021939e2f0dbf276ce8b1c3cceaa40e --- /dev/null +++ b/mmpose/codecs/utils/instance_property.py @@ -0,0 +1,111 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from typing import Optional + +import numpy as np + + +def get_instance_root(keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + root_type: str = 'kpt_center') -> np.ndarray: + """Calculate the coordinates and visibility of instance roots. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + root_type (str): Calculation of instance roots which should + be one of the following options: + + - ``'kpt_center'``: The roots' coordinates are the mean + coordinates of visible keypoints + - ``'bbox_center'``: The roots' are the center of bounding + boxes outlined by visible keypoints + + Defaults to ``'kpt_center'`` + + Returns: + tuple + - roots_coordinate(np.ndarray): Coordinates of instance roots in + shape [N, D] + - roots_visible(np.ndarray): Visibility of instance roots in + shape [N] + """ + + roots_coordinate = np.zeros((keypoints.shape[0], 2), dtype=np.float32) + roots_visible = np.ones((keypoints.shape[0]), dtype=np.float32) * 2 + + for i in range(keypoints.shape[0]): + + # collect visible keypoints + if keypoints_visible is not None: + visible_keypoints = keypoints[i][keypoints_visible[i] > 0] + else: + visible_keypoints = keypoints[i] + if visible_keypoints.size == 0: + roots_visible[i] = 0 + continue + + # compute the instance root with visible keypoints + if root_type == 'kpt_center': + roots_coordinate[i] = visible_keypoints.mean(axis=0) + roots_visible[i] = 1 + elif root_type == 'bbox_center': + roots_coordinate[i] = (visible_keypoints.max(axis=0) + + visible_keypoints.min(axis=0)) / 2.0 + roots_visible[i] = 1 + else: + raise ValueError( + f'the value of `root_type` must be \'kpt_center\' or ' + f'\'bbox_center\', but got \'{root_type}\'') + + return roots_coordinate, roots_visible + + +def get_instance_bbox(keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> np.ndarray: + """Calculate the pseudo instance bounding box from visible keypoints. The + bounding boxes are in the xyxy format. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + np.ndarray: bounding boxes in [N, 4] + """ + bbox = np.zeros((keypoints.shape[0], 4), dtype=np.float32) + for i in range(keypoints.shape[0]): + if keypoints_visible is not None: + visible_keypoints = keypoints[i][keypoints_visible[i] > 0] + else: + visible_keypoints = keypoints[i] + if visible_keypoints.size == 0: + continue + + bbox[i, :2] = visible_keypoints.min(axis=0) + bbox[i, 2:] = visible_keypoints.max(axis=0) + return bbox + + +def get_diagonal_lengths(keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None + ) -> np.ndarray: + """Calculate the diagonal length of instance bounding box from visible + keypoints. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + + Returns: + np.ndarray: bounding box diagonal length in [N] + """ + pseudo_bbox = get_instance_bbox(keypoints, keypoints_visible) + pseudo_bbox = pseudo_bbox.reshape(-1, 2, 2) + h_w_diff = pseudo_bbox[:, 1] - pseudo_bbox[:, 0] + diagonal_length = np.sqrt(np.power(h_w_diff, 2).sum(axis=1)) + + return diagonal_length diff --git a/mmpose/codecs/utils/offset_heatmap.py b/mmpose/codecs/utils/offset_heatmap.py new file mode 100644 index 0000000000000000000000000000000000000000..c3c1c32ed391982fa0f8cd31b6240363b4fe1c52 --- /dev/null +++ b/mmpose/codecs/utils/offset_heatmap.py @@ -0,0 +1,143 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Tuple + +import numpy as np + + +def generate_offset_heatmap( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + radius_factor: float, +) -> Tuple[np.ndarray, np.ndarray]: + """Generate offset heatmaps of keypoints, where each keypoint is + represented by 3 maps: one pixel-level class label map (1 for keypoint and + 0 for non-keypoint) and 2 pixel-level offset maps for x and y directions + respectively. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + radius_factor (float): The radius factor of the binary label + map. The positive region is defined as the neighbor of the + keypoint with the radius :math:`r=radius_factor*max(W, H)` + + Returns: + tuple: + - heatmap (np.ndarray): The generated heatmap in shape + (K*3, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (K,) + """ + + N, K, _ = keypoints.shape + W, H = heatmap_size + + heatmaps = np.zeros((K, 3, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + # xy grid + x = np.arange(0, W, 1) + y = np.arange(0, H, 1)[:, None] + + # positive area radius in the classification map + radius = radius_factor * max(W, H) + + for n, k in product(range(N), range(K)): + if keypoints_visible[n, k] < 0.5: + continue + + mu = keypoints[n, k] + + x_offset = (mu[0] - x) / radius + y_offset = (mu[1] - y) / radius + + heatmaps[k, 0] = np.where(x_offset**2 + y_offset**2 <= 1, 1., 0.) + heatmaps[k, 1] = x_offset + heatmaps[k, 2] = y_offset + + heatmaps = heatmaps.reshape(K * 3, H, W) + + return heatmaps, keypoint_weights + + +def generate_displacement_heatmap( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + roots: np.ndarray, + roots_visible: np.ndarray, + diagonal_lengths: np.ndarray, + radius: float, +): + """Generate displacement heatmaps of keypoints, where each keypoint is + represented by 3 maps: one pixel-level class label map (1 for keypoint and + 0 for non-keypoint) and 2 pixel-level offset maps for x and y directions + respectively. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + roots (np.ndarray): Coordinates of instance centers in shape (N, D). + The displacement fields of each instance will locate around its + center. + roots_visible (np.ndarray): Roots visibilities in shape (N,) + diagonal_lengths (np.ndarray): Diaginal length of the bounding boxes + of each instance in shape (N,) + radius (float): The radius factor of the binary label + map. The positive region is defined as the neighbor of the + keypoint with the radius :math:`r=radius_factor*max(W, H)` + + Returns: + tuple: + - displacements (np.ndarray): The generated displacement map in + shape (K*2, H, W) where [W, H] is the `heatmap_size` + - displacement_weights (np.ndarray): The target weights in shape + (K*2, H, W) + """ + N, K, _ = keypoints.shape + W, H = heatmap_size + + displacements = np.zeros((K * 2, H, W), dtype=np.float32) + displacement_weights = np.zeros((K * 2, H, W), dtype=np.float32) + instance_size_map = np.zeros((H, W), dtype=np.float32) + + for n in range(N): + if (roots_visible[n] < 1 or (roots[n, 0] < 0 or roots[n, 1] < 0) + or (roots[n, 0] >= W or roots[n, 1] >= H)): + continue + + diagonal_length = diagonal_lengths[n] + + for k in range(K): + if keypoints_visible[n, k] < 1 or keypoints[n, k, 0] < 0 \ + or keypoints[n, k, 1] < 0 or keypoints[n, k, 0] >= W \ + or keypoints[n, k, 1] >= H: + continue + + start_x = max(int(roots[n, 0] - radius), 0) + start_y = max(int(roots[n, 1] - radius), 0) + end_x = min(int(roots[n, 0] + radius), W) + end_y = min(int(roots[n, 1] + radius), H) + + for x in range(start_x, end_x): + for y in range(start_y, end_y): + if displacements[2 * k, y, + x] != 0 or displacements[2 * k + 1, y, + x] != 0: + if diagonal_length > instance_size_map[y, x]: + # keep the gt displacement of smaller instance + continue + + displacement_weights[2 * k:2 * k + 2, y, + x] = 1 / diagonal_length + displacements[2 * k:2 * k + 2, y, + x] = keypoints[n, k] - [x, y] + instance_size_map[y, x] = diagonal_length + + return displacements, displacement_weights diff --git a/mmpose/codecs/utils/oks_map.py b/mmpose/codecs/utils/oks_map.py new file mode 100644 index 0000000000000000000000000000000000000000..2f48169b045f08ef1e2afc5d22304ecb652ccad1 --- /dev/null +++ b/mmpose/codecs/utils/oks_map.py @@ -0,0 +1,72 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Optional, Tuple, Union + +import numpy as np + + +def generate_probmaps( + heatmap_size: Tuple[int, int], + keypoints: np.ndarray, + keypoints_visible: np.ndarray, + sigma: float = 0.55) -> Tuple[np.ndarray, np.ndarray]: + """Generate Object Keypoint Similarity (OKS) maps for keypoints. + + This function generates OKS maps that represent the expected OKS score at each + pixel location given the ground truth keypoint locations. The concept was + introduced in `ProbPose`_ to enable probabilistic keypoint detection. + + Args: + heatmap_size (Tuple[int, int]): Heatmap size in [W, H] + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D) + keypoints_visible (np.ndarray): Keypoint visibilities in shape + (N, K) + sigma (float): The sigma value to control the spread of the OKS map. + If None, per-keypoint sigmas from COCO will be used. Default: 0.55 + + Returns: + tuple: + - heatmaps (np.ndarray): The generated OKS maps in shape + (K, H, W) where [W, H] is the `heatmap_size` + - keypoint_weights (np.ndarray): The target weights in shape + (N, K) + + .. _`ProbPose`: https://arxiv.org/abs/2412.02254 + """ + + N, K, _ = keypoints.shape + W, H = heatmap_size + + # The default sigmas are used for COCO dataset. + sigmas = np.array( + [2.6, 2.5, 2.5, 3.5, 3.5, 7.9, 7.9, 7.2, 7.2, 6.2, 6.2, 10.7, 10.7, 8.7, 8.7, 8.9, 8.9])/100 + + heatmaps = np.zeros((K, H, W), dtype=np.float32) + keypoint_weights = keypoints_visible.copy() + + bbox_area = np.sqrt(H/1.25 * W/1.25) + + for n, k in product(range(N), range(K)): + kpt_sigma = sigmas[k] + # skip unlabled keypoints + if keypoints_visible[n, k] < 0.5: + continue + + y_idx, x_idx = np.indices((H, W)) + dx = x_idx - keypoints[n, k, 0] + dy = y_idx - keypoints[n, k, 1] + dist = np.sqrt(dx**2 + dy**2) + + vars = (kpt_sigma*2)**2 + s = vars * bbox_area * 2 + s = np.clip(s, 0.55, 3.0) + if sigma is not None and sigma > 0: + s = sigma + e_map = dist**2 / (2*s) + oks_map = np.exp(-e_map) + + keypoint_weights[n, k] = (oks_map.max() > 0).astype(int) + + heatmaps[k] = oks_map + + return heatmaps, keypoint_weights diff --git a/mmpose/codecs/utils/post_processing.py b/mmpose/codecs/utils/post_processing.py new file mode 100644 index 0000000000000000000000000000000000000000..0fe116072a70875e9e322dabf01e26b3f91758b4 --- /dev/null +++ b/mmpose/codecs/utils/post_processing.py @@ -0,0 +1,441 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product +from typing import Tuple + +import cv2 +import numpy as np +import torch +import torch.nn.functional as F +from torch import Tensor + +from scipy.ndimage import convolve + + +def _prepare_oks_kernels(K, H, W): + bbox_area = np.sqrt(H/1.25 * W/1.25) + + kpt_sigmas = np.array( + [2.6, 2.5, 2.5, 3.5, 3.5, 7.9, 7.9, 7.2, 7.2, 6.2, 6.2, 10.7, 10.7, 8.7, 8.7, 8.9, 8.9])/100 + + # Generate kernels for all keypoints once for later re-use + kernels = [] + for k in range(K): + vars = (kpt_sigmas[k]*2)**2 + s = vars * bbox_area * 2 + s = np.clip(s, 0.55, 3.0) + radius = np.ceil(s * 3).astype(int) + diameter = 2*radius + 1 + diameter = np.ceil(diameter).astype(int) + # kernel_sizes[kernel_sizes % 2 == 0] += 1 + center = diameter // 2 + dist_x = np.arange(diameter) - center + dist_y = np.arange(diameter) - center + dist_x, dist_y = np.meshgrid(dist_x, dist_y) + dist = np.sqrt(dist_x**2 + dist_y**2) + oks_kernel = np.exp(-dist**2 / (2 * s)) + oks_kernel = oks_kernel / oks_kernel.sum() + + oks_kernel = oks_kernel.reshape(1, diameter, diameter) + kernels.append(oks_kernel) + + return kernels + + +def get_simcc_normalized(batch_pred_simcc, sigma=None): + """Normalize the predicted SimCC. + + Args: + batch_pred_simcc (torch.Tensor): The predicted SimCC. + sigma (float): The sigma of the Gaussian distribution. + + Returns: + torch.Tensor: The normalized SimCC. + """ + B, K, _ = batch_pred_simcc.shape + + # Scale and clamp the tensor + if sigma is not None: + batch_pred_simcc = batch_pred_simcc / (sigma * np.sqrt(np.pi * 2)) + batch_pred_simcc = batch_pred_simcc.clamp(min=0) + + # Compute the binary mask + mask = (batch_pred_simcc.amax(dim=-1) > 1).reshape(B, K, 1) + + # Normalize the tensor using the maximum value + norm = (batch_pred_simcc / batch_pred_simcc.amax(dim=-1).reshape(B, K, 1)) + + # Apply normalization + batch_pred_simcc = torch.where(mask, norm, batch_pred_simcc) + + return batch_pred_simcc + + +def get_simcc_maximum(simcc_x: np.ndarray, + simcc_y: np.ndarray, + apply_softmax: bool = False + ) -> Tuple[np.ndarray, np.ndarray]: + """Get maximum response location and value from simcc representations. + + Note: + instance number: N + num_keypoints: K + heatmap height: H + heatmap width: W + + Args: + simcc_x (np.ndarray): x-axis SimCC in shape (K, Wx) or (N, K, Wx) + simcc_y (np.ndarray): y-axis SimCC in shape (K, Wy) or (N, K, Wy) + apply_softmax (bool): whether to apply softmax on the heatmap. + Defaults to False. + + Returns: + tuple: + - locs (np.ndarray): locations of maximum heatmap responses in shape + (K, 2) or (N, K, 2) + - vals (np.ndarray): values of maximum heatmap responses in shape + (K,) or (N, K) + """ + + assert isinstance(simcc_x, np.ndarray), ('simcc_x should be numpy.ndarray') + assert isinstance(simcc_y, np.ndarray), ('simcc_y should be numpy.ndarray') + assert simcc_x.ndim == 2 or simcc_x.ndim == 3, ( + f'Invalid shape {simcc_x.shape}') + assert simcc_y.ndim == 2 or simcc_y.ndim == 3, ( + f'Invalid shape {simcc_y.shape}') + assert simcc_x.ndim == simcc_y.ndim, ( + f'{simcc_x.shape} != {simcc_y.shape}') + + if simcc_x.ndim == 3: + N, K, Wx = simcc_x.shape + simcc_x = simcc_x.reshape(N * K, -1) + simcc_y = simcc_y.reshape(N * K, -1) + else: + N = None + + if apply_softmax: + simcc_x = simcc_x - np.max(simcc_x, axis=1, keepdims=True) + simcc_y = simcc_y - np.max(simcc_y, axis=1, keepdims=True) + ex, ey = np.exp(simcc_x), np.exp(simcc_y) + simcc_x = ex / np.sum(ex, axis=1, keepdims=True) + simcc_y = ey / np.sum(ey, axis=1, keepdims=True) + + x_locs = np.argmax(simcc_x, axis=1) + y_locs = np.argmax(simcc_y, axis=1) + locs = np.stack((x_locs, y_locs), axis=-1).astype(np.float32) + max_val_x = np.amax(simcc_x, axis=1) + max_val_y = np.amax(simcc_y, axis=1) + + mask = max_val_x > max_val_y + max_val_x[mask] = max_val_y[mask] + vals = max_val_x + locs[vals <= 0.] = -1 + + if N: + locs = locs.reshape(N, K, 2) + vals = vals.reshape(N, K) + + return locs, vals + + +def get_heatmap_3d_maximum(heatmaps: np.ndarray + ) -> Tuple[np.ndarray, np.ndarray]: + """Get maximum response location and value from heatmaps. + + Note: + batch_size: B + num_keypoints: K + heatmap dimension: D + heatmap height: H + heatmap width: W + + Args: + heatmaps (np.ndarray): Heatmaps in shape (K, D, H, W) or + (B, K, D, H, W) + + Returns: + tuple: + - locs (np.ndarray): locations of maximum heatmap responses in shape + (K, 3) or (B, K, 3) + - vals (np.ndarray): values of maximum heatmap responses in shape + (K,) or (B, K) + """ + assert isinstance(heatmaps, + np.ndarray), ('heatmaps should be numpy.ndarray') + assert heatmaps.ndim == 4 or heatmaps.ndim == 5, ( + f'Invalid shape {heatmaps.shape}') + + if heatmaps.ndim == 4: + K, D, H, W = heatmaps.shape + B = None + heatmaps_flatten = heatmaps.reshape(K, -1) + else: + B, K, D, H, W = heatmaps.shape + heatmaps_flatten = heatmaps.reshape(B * K, -1) + + z_locs, y_locs, x_locs = np.unravel_index( + np.argmax(heatmaps_flatten, axis=1), shape=(D, H, W)) + locs = np.stack((x_locs, y_locs, z_locs), axis=-1).astype(np.float32) + vals = np.amax(heatmaps_flatten, axis=1) + locs[vals <= 0.] = -1 + + if B: + locs = locs.reshape(B, K, 3) + vals = vals.reshape(B, K) + + return locs, vals + + +def get_heatmap_maximum(heatmaps: np.ndarray) -> Tuple[np.ndarray, np.ndarray]: + """Get maximum response location and value from heatmaps. + + Note: + batch_size: B + num_keypoints: K + heatmap height: H + heatmap width: W + + Args: + heatmaps (np.ndarray): Heatmaps in shape (K, H, W) or (B, K, H, W) + + Returns: + tuple: + - locs (np.ndarray): locations of maximum heatmap responses in shape + (K, 2) or (B, K, 2) + - vals (np.ndarray): values of maximum heatmap responses in shape + (K,) or (B, K) + """ + assert isinstance(heatmaps, + np.ndarray), ('heatmaps should be numpy.ndarray') + assert heatmaps.ndim == 3 or heatmaps.ndim == 4, ( + f'Invalid shape {heatmaps.shape}') + + if heatmaps.ndim == 3: + K, H, W = heatmaps.shape + B = None + heatmaps_flatten = heatmaps.reshape(K, -1) + else: + B, K, H, W = heatmaps.shape + heatmaps_flatten = heatmaps.reshape(B * K, -1) + + y_locs, x_locs = np.unravel_index( + np.argmax(heatmaps_flatten, axis=1), shape=(H, W)) + locs = np.stack((x_locs, y_locs), axis=-1).astype(np.float32) + vals = np.amax(heatmaps_flatten, axis=1) + locs[vals <= 0.] = -1 + + if B: + locs = locs.reshape(B, K, 2) + vals = vals.reshape(B, K) + + return locs, vals + + +def gaussian_blur(heatmaps: np.ndarray, kernel: int = 11) -> np.ndarray: + """Modulate heatmap distribution with Gaussian. + + Note: + - num_keypoints: K + - heatmap height: H + - heatmap width: W + + Args: + heatmaps (np.ndarray[K, H, W]): model predicted heatmaps. + kernel (int): Gaussian kernel size (K) for modulation, which should + match the heatmap gaussian sigma when training. + K=17 for sigma=3 and k=11 for sigma=2. + + Returns: + np.ndarray ([K, H, W]): Modulated heatmap distribution. + """ + assert kernel % 2 == 1 + + border = (kernel - 1) // 2 + K, H, W = heatmaps.shape + + for k in range(K): + origin_max = np.max(heatmaps[k]) + dr = np.zeros((H + 2 * border, W + 2 * border), dtype=np.float32) + dr[border:-border, border:-border] = heatmaps[k].copy() + dr = cv2.GaussianBlur(dr, (kernel, kernel), 0) + heatmaps[k] = dr[border:-border, border:-border].copy() + heatmaps[k] *= origin_max / (np.max(heatmaps[k])+1e-12) + return heatmaps + + +def gaussian_blur1d(simcc: np.ndarray, kernel: int = 11) -> np.ndarray: + """Modulate simcc distribution with Gaussian. + + Note: + - num_keypoints: K + - simcc length: Wx + + Args: + simcc (np.ndarray[K, Wx]): model predicted simcc. + kernel (int): Gaussian kernel size (K) for modulation, which should + match the simcc gaussian sigma when training. + K=17 for sigma=3 and k=11 for sigma=2. + + Returns: + np.ndarray ([K, Wx]): Modulated simcc distribution. + """ + assert kernel % 2 == 1 + + border = (kernel - 1) // 2 + N, K, Wx = simcc.shape + + for n, k in product(range(N), range(K)): + origin_max = np.max(simcc[n, k]) + dr = np.zeros((1, Wx + 2 * border), dtype=np.float32) + dr[0, border:-border] = simcc[n, k].copy() + dr = cv2.GaussianBlur(dr, (kernel, 1), 0) + simcc[n, k] = dr[0, border:-border].copy() + simcc[n, k] *= origin_max / np.max(simcc[n, k]) + return simcc + + +def batch_heatmap_nms(batch_heatmaps: Tensor, kernel_size: int = 5): + """Apply NMS on a batch of heatmaps. + + Args: + batch_heatmaps (Tensor): batch heatmaps in shape (B, K, H, W) + kernel_size (int): The kernel size of the NMS which should be + a odd integer. Defaults to 5 + + Returns: + Tensor: The batch heatmaps after NMS. + """ + + assert isinstance(kernel_size, int) and kernel_size % 2 == 1, \ + f'The kernel_size should be an odd integer, got {kernel_size}' + + padding = (kernel_size - 1) // 2 + + maximum = F.max_pool2d( + batch_heatmaps, kernel_size, stride=1, padding=padding) + maximum_indicator = torch.eq(batch_heatmaps, maximum) + batch_heatmaps = batch_heatmaps * maximum_indicator.float() + + return batch_heatmaps + + +def get_heatmap_expected_value(heatmaps: np.ndarray, parzen_size: float = 0.1, return_heatmap: bool = False) -> Tuple[np.ndarray, np.ndarray]: + """Get maximum response location and value from heatmaps. + + Note: + batch_size: B + num_keypoints: K + heatmap height: H + heatmap width: W + + Args: + heatmaps (np.ndarray): Heatmaps in shape (K, H, W) or (B, K, H, W) + + Returns: + tuple: + - locs (np.ndarray): locations of maximum heatmap responses in shape + (K, 2) or (B, K, 2) + - vals (np.ndarray): values of maximum heatmap responses in shape + (K,) or (B, K) + """ + assert isinstance(heatmaps, + np.ndarray), ('heatmaps should be numpy.ndarray') + assert heatmaps.ndim == 3 or heatmaps.ndim == 4, ( + f'Invalid shape {heatmaps.shape}') + + assert parzen_size >= 0.0 and parzen_size <= 1.0, ( + f'Invalid parzen_size {parzen_size}') + + if heatmaps.ndim == 3: + K, H, W = heatmaps.shape + B = 1 + FIRST_DIM = K + heatmaps_flatten = heatmaps.reshape(1, K, H, W) + else: + B, K, H, W = heatmaps.shape + FIRST_DIM = K*B + heatmaps_flatten = heatmaps.reshape(B, K, H, W) + + KERNELS = _prepare_oks_kernels(K, H, W) + + heatmaps_convolved = np.zeros_like(heatmaps_flatten) + for k in range(K): + htm_flat = heatmaps_flatten[:, k, :, :].reshape(B, H, W) + # breakpoint() + # htm_conv = convolve2d(htm_flat, KERNELS[k], mode='same', boundary='symm') + htm_conv = convolve(htm_flat, KERNELS[k], mode='reflect') + heatmaps_convolved[:, k, :, :] = htm_conv.reshape(B, 1, H, W) + + heatmaps_convolved = heatmaps_convolved.reshape(B*K, H*W) + y_locs, x_locs = np.unravel_index( + np.argmax(heatmaps_convolved, axis=1), shape=(H, W)) + locs = np.stack((x_locs, y_locs), axis=-1).astype(np.float32) + + # Apply mean-shift to get sub-pixel locations + locs = _get_subpixel_maximums(heatmaps_convolved.reshape(B*K, H, W), locs) + + x_locs_int = np.round(x_locs).astype(int) + x_locs_int = np.clip(x_locs_int, 0, W-1) + y_locs_int = np.round(y_locs).astype(int) + y_locs_int = np.clip(y_locs_int, 0, H-1) + vals = heatmaps_flatten[np.arange(B), np.arange(K), y_locs_int, x_locs_int] + + heatmaps_convolved = heatmaps_convolved.reshape(B, K, H, W) + + if B > 1: + locs = locs.reshape(B, K, 2) + vals = vals.reshape(B, K) + heatmaps_convolved = heatmaps_convolved.reshape(B, K, H, W) + else: + locs = locs.reshape(K, 2) + vals = vals.reshape(K) + heatmaps_convolved = heatmaps_convolved.reshape(K, H, W) + + if return_heatmap: + return locs, vals, heatmaps_convolved + else: + return locs, vals + + +def _get_subpixel_maximums(heatmaps, locs): + # Extract integer peak locations + x_locs = locs[:, 0].astype(np.int32) + y_locs = locs[:, 1].astype(np.int32) + + # Ensure we are not near the boundaries (avoid boundary issues) + valid_mask = (x_locs > 0) & (x_locs < heatmaps.shape[2] - 1) & \ + (y_locs > 0) & (y_locs < heatmaps.shape[1] - 1) + + # Initialize the output array with the integer locations + subpixel_locs = locs.copy() + + if np.any(valid_mask): + # Extract valid locations + x_locs_valid = x_locs[valid_mask] + y_locs_valid = y_locs[valid_mask] + + # Compute gradients (dx, dy) and second derivatives (dxx, dyy) + dx = (heatmaps[valid_mask, y_locs_valid, x_locs_valid + 1] - + heatmaps[valid_mask, y_locs_valid, x_locs_valid - 1]) / 2.0 + dy = (heatmaps[valid_mask, y_locs_valid + 1, x_locs_valid] - + heatmaps[valid_mask, y_locs_valid - 1, x_locs_valid]) / 2.0 + dxx = heatmaps[valid_mask, y_locs_valid, x_locs_valid + 1] + \ + heatmaps[valid_mask, y_locs_valid, x_locs_valid - 1] - \ + 2 * heatmaps[valid_mask, y_locs_valid, x_locs_valid] + dyy = heatmaps[valid_mask, y_locs_valid + 1, x_locs_valid] + \ + heatmaps[valid_mask, y_locs_valid - 1, x_locs_valid] - \ + 2 * heatmaps[valid_mask, y_locs_valid, x_locs_valid] + + # Avoid division by zero by setting a minimum threshold for the second derivatives + dxx = np.where(dxx != 0, dxx, 1e-6) + dyy = np.where(dyy != 0, dyy, 1e-6) + + # Calculate the sub-pixel shift + subpixel_x_shift = -dx / dxx + subpixel_y_shift = -dy / dyy + + # Update subpixel locations for valid indices + subpixel_locs[valid_mask, 0] += subpixel_x_shift + subpixel_locs[valid_mask, 1] += subpixel_y_shift + + return subpixel_locs + diff --git a/mmpose/codecs/utils/refinement.py b/mmpose/codecs/utils/refinement.py new file mode 100644 index 0000000000000000000000000000000000000000..13c79b4b4c1c8b774a84801ac2c03bac3417cf7d --- /dev/null +++ b/mmpose/codecs/utils/refinement.py @@ -0,0 +1,215 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from itertools import product + +import numpy as np + +from .post_processing import gaussian_blur, gaussian_blur1d + + +def refine_keypoints(keypoints: np.ndarray, + heatmaps: np.ndarray) -> np.ndarray: + """Refine keypoint predictions by moving from the maximum towards the + second maximum by 0.25 pixel. The operation is in-place. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - heatmap size: [W, H] + + Args: + keypoints (np.ndarray): The keypoint coordinates in shape (N, K, D) + heatmaps (np.ndarray): The heatmaps in shape (K, H, W) + + Returns: + np.ndarray: Refine keypoint coordinates in shape (N, K, D) + """ + N, K = keypoints.shape[:2] + H, W = heatmaps.shape[1:] + + for n, k in product(range(N), range(K)): + x, y = keypoints[n, k, :2].astype(int) + + if 1 < x < W - 1 and 0 < y < H: + dx = heatmaps[k, y, x + 1] - heatmaps[k, y, x - 1] + else: + dx = 0. + + if 1 < y < H - 1 and 0 < x < W: + dy = heatmaps[k, y + 1, x] - heatmaps[k, y - 1, x] + else: + dy = 0. + + keypoints[n, k] += np.sign([dx, dy], dtype=np.float32) * 0.25 + + return keypoints + + +def refine_keypoints_dark(keypoints: np.ndarray, heatmaps: np.ndarray, + blur_kernel_size: int) -> np.ndarray: + """Refine keypoint predictions using distribution aware coordinate + decoding. See `Dark Pose`_ for details. The operation is in-place. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - heatmap size: [W, H] + + Args: + keypoints (np.ndarray): The keypoint coordinates in shape (N, K, D) + heatmaps (np.ndarray): The heatmaps in shape (K, H, W) + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation + + Returns: + np.ndarray: Refine keypoint coordinates in shape (N, K, D) + + .. _`Dark Pose`: https://arxiv.org/abs/1910.06278 + """ + N, K = keypoints.shape[:2] + H, W = heatmaps.shape[1:] + + # modulate heatmaps + heatmaps = gaussian_blur(heatmaps, blur_kernel_size) + np.maximum(heatmaps, 1e-10, heatmaps) + np.log(heatmaps, heatmaps) + + for n, k in product(range(N), range(K)): + x, y = keypoints[n, k, :2].astype(int) + if 1 < x < W - 2 and 1 < y < H - 2: + dx = 0.5 * (heatmaps[k, y, x + 1] - heatmaps[k, y, x - 1]) + dy = 0.5 * (heatmaps[k, y + 1, x] - heatmaps[k, y - 1, x]) + + dxx = 0.25 * ( + heatmaps[k, y, x + 2] - 2 * heatmaps[k, y, x] + + heatmaps[k, y, x - 2]) + dxy = 0.25 * ( + heatmaps[k, y + 1, x + 1] - heatmaps[k, y - 1, x + 1] - + heatmaps[k, y + 1, x - 1] + heatmaps[k, y - 1, x - 1]) + dyy = 0.25 * ( + heatmaps[k, y + 2, x] - 2 * heatmaps[k, y, x] + + heatmaps[k, y - 2, x]) + derivative = np.array([[dx], [dy]]) + hessian = np.array([[dxx, dxy], [dxy, dyy]]) + if dxx * dyy - dxy**2 != 0: + hessianinv = np.linalg.pinv(hessian) + offset = -hessianinv @ derivative + offset = np.squeeze(np.array(offset.T), axis=0) + keypoints[n, k, :2] += offset + return keypoints + + +def refine_keypoints_dark_udp(keypoints: np.ndarray, heatmaps: np.ndarray, + blur_kernel_size: int) -> np.ndarray: + """Refine keypoint predictions using distribution aware coordinate decoding + for UDP. See `UDP`_ for details. The operation is in-place. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - heatmap size: [W, H] + + Args: + keypoints (np.ndarray): The keypoint coordinates in shape (N, K, D) + heatmaps (np.ndarray): The heatmaps in shape (K, H, W) + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation + + Returns: + np.ndarray: Refine keypoint coordinates in shape (N, K, D) + + .. _`UDP`: https://arxiv.org/abs/1911.07524 + """ + N, K = keypoints.shape[:2] + H, W = heatmaps.shape[1:] + + # modulate heatmaps + heatmaps = gaussian_blur(heatmaps, blur_kernel_size) + np.clip(heatmaps, 1e-3, 50., heatmaps) + np.log(heatmaps, heatmaps) + + heatmaps_pad = np.pad( + heatmaps, ((0, 0), (1, 1), (1, 1)), mode='edge').flatten() + + for n in range(N): + index = keypoints[n, :, 0] + 1 + (keypoints[n, :, 1] + 1) * (W + 2) + index += (W + 2) * (H + 2) * np.arange(0, K) + index = index.astype(int).reshape(-1, 1) + i_ = heatmaps_pad[index] + ix1 = heatmaps_pad[index + 1] + iy1 = heatmaps_pad[index + W + 2] + ix1y1 = heatmaps_pad[index + W + 3] + ix1_y1_ = heatmaps_pad[index - W - 3] + ix1_ = heatmaps_pad[index - 1] + iy1_ = heatmaps_pad[index - 2 - W] + + dx = 0.5 * (ix1 - ix1_) + dy = 0.5 * (iy1 - iy1_) + derivative = np.concatenate([dx, dy], axis=1) + derivative = derivative.reshape(K, 2, 1) + + dxx = ix1 - 2 * i_ + ix1_ + dyy = iy1 - 2 * i_ + iy1_ + dxy = 0.5 * (ix1y1 - ix1 - iy1 + i_ + i_ - ix1_ - iy1_ + ix1_y1_) + hessian = np.concatenate([dxx, dxy, dxy, dyy], axis=1) + hessian = hessian.reshape(K, 2, 2) + hessian = np.linalg.pinv(hessian + np.finfo(np.float32).eps * np.eye(2)) + keypoints[n] -= np.einsum('imn,ink->imk', hessian, + derivative).squeeze() + + return keypoints + + +def refine_simcc_dark(keypoints: np.ndarray, simcc: np.ndarray, + blur_kernel_size: int) -> np.ndarray: + """SimCC version. Refine keypoint predictions using distribution aware + coordinate decoding for UDP. See `UDP`_ for details. The operation is in- + place. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + + Args: + keypoints (np.ndarray): The keypoint coordinates in shape (N, K, D) + simcc (np.ndarray): The heatmaps in shape (N, K, Wx) + blur_kernel_size (int): The Gaussian blur kernel size of the heatmap + modulation + + Returns: + np.ndarray: Refine keypoint coordinates in shape (N, K, D) + + .. _`UDP`: https://arxiv.org/abs/1911.07524 + """ + N = simcc.shape[0] + + # modulate simcc + simcc = gaussian_blur1d(simcc, blur_kernel_size) + np.clip(simcc, 1e-3, 50., simcc) + np.log(simcc, simcc) + + simcc = np.pad(simcc, ((0, 0), (0, 0), (2, 2)), 'edge') + + for n in range(N): + px = (keypoints[n] + 2.5).astype(np.int64).reshape(-1, 1) # K, 1 + + dx0 = np.take_along_axis(simcc[n], px, axis=1) # K, 1 + dx1 = np.take_along_axis(simcc[n], px + 1, axis=1) + dx_1 = np.take_along_axis(simcc[n], px - 1, axis=1) + dx2 = np.take_along_axis(simcc[n], px + 2, axis=1) + dx_2 = np.take_along_axis(simcc[n], px - 2, axis=1) + + dx = 0.5 * (dx1 - dx_1) + dxx = 1e-9 + 0.25 * (dx2 - 2 * dx0 + dx_2) + + offset = dx / dxx + keypoints[n] -= offset.reshape(-1) + + return keypoints diff --git a/mmpose/codecs/video_pose_lifting.py b/mmpose/codecs/video_pose_lifting.py new file mode 100644 index 0000000000000000000000000000000000000000..5a5a7b1983381b9752d3bc9514fc28d6e1f73c43 --- /dev/null +++ b/mmpose/codecs/video_pose_lifting.py @@ -0,0 +1,246 @@ +# Copyright (c) OpenMMLab. All rights reserved. + +from copy import deepcopy +from typing import List, Optional, Tuple, Union + +import numpy as np + +from mmpose.registry import KEYPOINT_CODECS +from .base import BaseKeypointCodec + + +@KEYPOINT_CODECS.register_module() +class VideoPoseLifting(BaseKeypointCodec): + r"""Generate keypoint coordinates for pose lifter. + + Note: + + - instance number: N + - keypoint number: K + - keypoint dimension: D + - pose-lifitng target dimension: C + + Args: + num_keypoints (int): The number of keypoints in the dataset. + zero_center: Whether to zero-center the target around root. Default: + ``True``. + root_index (Union[int, List]): Root keypoint index in the pose. + Default: 0. + remove_root (bool): If true, remove the root keypoint from the pose. + Default: ``False``. + save_index (bool): If true, store the root position separated from the + original pose, only takes effect if ``remove_root`` is ``True``. + Default: ``False``. + reshape_keypoints (bool): If true, reshape the keypoints into shape + (-1, N). Default: ``True``. + concat_vis (bool): If true, concat the visibility item of keypoints. + Default: ``False``. + normalize_camera (bool): Whether to normalize camera intrinsics. + Default: ``False``. + """ + + auxiliary_encode_keys = { + 'lifting_target', 'lifting_target_visible', 'camera_param' + } + + instance_mapping_table = dict( + lifting_target='lifting_target', + lifting_target_visible='lifting_target_visible', + ) + label_mapping_table = dict( + trajectory_weights='trajectory_weights', + lifting_target_label='lifting_target_label', + lifting_target_weight='lifting_target_weight') + + def __init__(self, + num_keypoints: int, + zero_center: bool = True, + root_index: Union[int, List] = 0, + remove_root: bool = False, + save_index: bool = False, + reshape_keypoints: bool = True, + concat_vis: bool = False, + normalize_camera: bool = False): + super().__init__() + + self.num_keypoints = num_keypoints + self.zero_center = zero_center + if isinstance(root_index, int): + root_index = [root_index] + self.root_index = root_index + self.remove_root = remove_root + self.save_index = save_index + self.reshape_keypoints = reshape_keypoints + self.concat_vis = concat_vis + self.normalize_camera = normalize_camera + + def encode(self, + keypoints: np.ndarray, + keypoints_visible: Optional[np.ndarray] = None, + lifting_target: Optional[np.ndarray] = None, + lifting_target_visible: Optional[np.ndarray] = None, + camera_param: Optional[dict] = None) -> dict: + """Encoding keypoints from input image space to normalized space. + + Args: + keypoints (np.ndarray): Keypoint coordinates in shape (N, K, D). + keypoints_visible (np.ndarray, optional): Keypoint visibilities in + shape (N, K). + lifting_target (np.ndarray, optional): 3d target coordinate in + shape (T, K, C). + lifting_target_visible (np.ndarray, optional): Target coordinate in + shape (T, K, ). + camera_param (dict, optional): The camera parameter dictionary. + + Returns: + encoded (dict): Contains the following items: + + - keypoint_labels (np.ndarray): The processed keypoints in + shape like (N, K, D) or (K * D, N). + - keypoint_labels_visible (np.ndarray): The processed + keypoints' weights in shape (N, K, ) or (N-1, K, ). + - lifting_target_label: The processed target coordinate in + shape (K, C) or (K-1, C). + - lifting_target_weight (np.ndarray): The target weights in + shape (K, ) or (K-1, ). + - trajectory_weights (np.ndarray): The trajectory weights in + shape (K, ). + + In addition, there are some optional items it may contain: + + - target_root (np.ndarray): The root coordinate of target in + shape (C, ). Exists if ``zero_center`` is ``True``. + - target_root_removed (bool): Indicate whether the root of + pose-lifitng target is removed. Exists if + ``remove_root`` is ``True``. + - target_root_index (int): An integer indicating the index of + root. Exists if ``remove_root`` and ``save_index`` + are ``True``. + - camera_param (dict): The updated camera parameter dictionary. + Exists if ``normalize_camera`` is ``True``. + """ + if keypoints_visible is None: + keypoints_visible = np.ones(keypoints.shape[:2], dtype=np.float32) + + if lifting_target is None: + lifting_target = [keypoints[0]] + + # set initial value for `lifting_target_weight` + # and `trajectory_weights` + if lifting_target_visible is None: + lifting_target_visible = np.ones( + lifting_target.shape[:-1], dtype=np.float32) + lifting_target_weight = lifting_target_visible + trajectory_weights = (1 / lifting_target[:, 2]) + else: + valid = lifting_target_visible > 0.5 + lifting_target_weight = np.where(valid, 1., 0.).astype(np.float32) + trajectory_weights = lifting_target_weight + + if camera_param is None: + camera_param = dict() + + encoded = dict() + + lifting_target_label = lifting_target.copy() + # Zero-center the target pose around a given root keypoint + if self.zero_center: + assert (lifting_target.ndim >= 2 and + lifting_target.shape[-2] > max(self.root_index)), \ + f'Got invalid joint shape {lifting_target.shape}' + + root = np.mean(lifting_target[..., self.root_index, :], axis=-2) + lifting_target_label -= root[..., np.newaxis, :] + encoded['target_root'] = root + + if self.remove_root and len(self.root_index) == 1: + root_index = self.root_index[0] + lifting_target_label = np.delete( + lifting_target_label, root_index, axis=-2) + lifting_target_visible = np.delete( + lifting_target_visible, root_index, axis=-2) + assert lifting_target_weight.ndim in { + 2, 3 + }, (f'Got invalid lifting target weights shape ' + f'{lifting_target_weight.shape}') + + axis_to_remove = -2 if lifting_target_weight.ndim == 3 else -1 + lifting_target_weight = np.delete( + lifting_target_weight, root_index, axis=axis_to_remove) + # Add a flag to avoid latter transforms that rely on the root + # joint or the original joint index + encoded['target_root_removed'] = True + + # Save the root index for restoring the global pose + if self.save_index: + encoded['target_root_index'] = root_index + + # Normalize the 2D keypoint coordinate with image width and height + _camera_param = deepcopy(camera_param) + assert 'w' in _camera_param and 'h' in _camera_param, ( + 'Camera parameter `w` and `h` should be provided.') + + center = np.array([0.5 * _camera_param['w'], 0.5 * _camera_param['h']], + dtype=np.float32) + scale = np.array(0.5 * _camera_param['w'], dtype=np.float32) + + keypoint_labels = (keypoints - center) / scale + + assert keypoint_labels.ndim in { + 2, 3 + }, (f'Got invalid keypoint labels shape {keypoint_labels.shape}') + if keypoint_labels.ndim == 2: + keypoint_labels = keypoint_labels[None, ...] + + if self.normalize_camera: + assert 'f' in _camera_param and 'c' in _camera_param, ( + 'Camera parameter `f` and `c` should be provided.') + _camera_param['f'] = _camera_param['f'] / scale + _camera_param['c'] = (_camera_param['c'] - center[:, None]) / scale + encoded['camera_param'] = _camera_param + + if self.concat_vis: + keypoints_visible_ = keypoints_visible + if keypoints_visible.ndim == 2: + keypoints_visible_ = keypoints_visible[..., None] + keypoint_labels = np.concatenate( + (keypoint_labels, keypoints_visible_), axis=2) + + if self.reshape_keypoints: + N = keypoint_labels.shape[0] + keypoint_labels = keypoint_labels.transpose(1, 2, 0).reshape(-1, N) + + encoded['keypoint_labels'] = keypoint_labels + encoded['keypoints_visible'] = keypoints_visible + encoded['lifting_target_label'] = lifting_target_label + encoded['lifting_target_weight'] = lifting_target_weight + encoded['trajectory_weights'] = trajectory_weights + + return encoded + + def decode(self, + encoded: np.ndarray, + target_root: Optional[np.ndarray] = None + ) -> Tuple[np.ndarray, np.ndarray]: + """Decode keypoint coordinates from normalized space to input image + space. + + Args: + encoded (np.ndarray): Coordinates in shape (N, K, C). + target_root (np.ndarray, optional): The pose-lifitng target root + coordinate. Default: ``None``. + + Returns: + keypoints (np.ndarray): Decoded coordinates in shape (N, K, C). + scores (np.ndarray): The keypoint scores in shape (N, K). + """ + keypoints = encoded.copy() + + if target_root is not None and target_root.size > 0: + keypoints = keypoints + target_root + if self.remove_root and len(self.root_index) == 1: + keypoints = np.insert( + keypoints, self.root_index, target_root, axis=1) + scores = np.ones(keypoints.shape[:-1], dtype=np.float32) + + return keypoints, scores diff --git a/mmpose/configs/_base_/default_runtime.py b/mmpose/configs/_base_/default_runtime.py new file mode 100644 index 0000000000000000000000000000000000000000..349ecf4b17cf2fb2a23dfc66b66e98c4654a3ab2 --- /dev/null +++ b/mmpose/configs/_base_/default_runtime.py @@ -0,0 +1,54 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.hooks import (CheckpointHook, DistSamplerSeedHook, IterTimerHook, + LoggerHook, ParamSchedulerHook, SyncBuffersHook) +from mmengine.runner import LogProcessor +from mmengine.visualization import LocalVisBackend + +from mmpose.engine.hooks import PoseVisualizationHook +from mmpose.visualization import PoseLocalVisualizer + +default_scope = None + +# hooks +default_hooks = dict( + timer=dict(type=IterTimerHook), + logger=dict(type=LoggerHook, interval=50), + param_scheduler=dict(type=ParamSchedulerHook), + checkpoint=dict(type=CheckpointHook, interval=10), + sampler_seed=dict(type=DistSamplerSeedHook), + visualization=dict(type=PoseVisualizationHook, enable=False), +) + +# custom hooks +custom_hooks = [ + # Synchronize model buffers such as running_mean and running_var in BN + # at the end of each epoch + dict(type=SyncBuffersHook) +] + +# multi-processing backend +env_cfg = dict( + cudnn_benchmark=False, + mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0), + dist_cfg=dict(backend='nccl'), +) + +# visualizer +vis_backends = [dict(type=LocalVisBackend)] +visualizer = dict( + type=PoseLocalVisualizer, vis_backends=vis_backends, name='visualizer') + +# logger +log_processor = dict( + type=LogProcessor, window_size=50, by_epoch=True, num_digits=6) +log_level = 'INFO' +load_from = None +resume = False + +# file I/O backend +backend_args = dict(backend='local') + +# training/validation/testing progress +train_cfg = dict(by_epoch=True) +val_cfg = dict() +test_cfg = dict() diff --git a/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_m_8xb256-420e_coco-256x192.py b/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_m_8xb256-420e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..af102ec20e2c843c2b93b3050e2328334bd6f1d0 --- /dev/null +++ b/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_m_8xb256-420e_coco-256x192.py @@ -0,0 +1,253 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.datasets.transforms import YOLOXHSVRandomAug +from mmdet.engine.hooks import PipelineSwitchHook +from mmdet.models import CSPNeXt +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (CocoDataset, GenerateTarget, GetBBoxCenterScale, + LoadImage, PackPoseInputs, RandomFlip, + RandomHalfBody, TopdownAffine) +from mmpose.datasets.transforms.common_transforms import (Albumentation, + RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoMetric +from mmpose.models import (KLDiscretLoss, PoseDataPreprocessor, RTMCCHead, + TopdownPoseEstimator) + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.05), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth' # noqa + )), + head=dict( + type=RTMCCHead, + in_channels=768, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=(6, 8), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoDataset +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/', +# f'{data_root}': 's3://openmmlab/datasets/detection/coco/' +# })) + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=YOLOXHSVRandomAug), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.), + ]), + dict(type=GenerateTarget, encoder=codec), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] + +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=YOLOXHSVRandomAug), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type=GenerateTarget, encoder=codec), + dict(type=PackPoseInputs) +] + +# data loaders +train_dataloader = dict( + batch_size=256, + num_workers=10, + persistent_workers=True, + drop_last=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + # bbox_file=f'{data_root}person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks.update( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoMetric, + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_s_8xb256_420e_aic_coco_256x192.py b/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_s_8xb256_420e_aic_coco_256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..6fc5ec0abe2d67f63cf6f7e7222c48bee904e73a --- /dev/null +++ b/mmpose/configs/body_2d_keypoint/rtmpose/coco/rtmpose_s_8xb256_420e_aic_coco_256x192.py @@ -0,0 +1,294 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.datasets.transforms import YOLOXHSVRandomAug +from mmdet.engine.hooks import PipelineSwitchHook +from mmdet.models import CSPNeXt +from mmengine.dataset import DefaultSampler, RepeatDataset +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoDataset, CombinedDataset, + GenerateTarget, GetBBoxCenterScale, + KeypointConverter, LoadImage, PackPoseInputs, + RandomFlip, RandomHalfBody, TopdownAffine) +from mmpose.datasets.transforms.common_transforms import (Albumentation, + RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoMetric +from mmpose.models import (KLDiscretLoss, PoseDataPreprocessor, RTMCCHead, + TopdownPoseEstimator) + +# runtime +max_epochs = 420 +stage2_num_epochs = 30 +base_lr = 4e-3 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.0), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + # use cosine lr from 210 to 420 epoch + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=1024) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=(192, 256), + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + _scope_='mmdet', + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=0.33, + widen_factor=0.5, + out_indices=(4, ), + channel_attention=True, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth' # noqa + )), + head=dict( + type=RTMCCHead, + in_channels=512, + out_channels=17, + input_size=codec['input_size'], + in_featuremap_size=(6, 8), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=10., + label_softmax=True), + decoder=codec), + test_cfg=dict(flip_test=True, )) + +# base dataset settings +dataset_type = CocoDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') +# backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# f'{data_root}': 's3://openmmlab/datasets/', +# f'{data_root}': 's3://openmmlab/datasets/' +# })) + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.6, 1.4], rotate_factor=80), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=YOLOXHSVRandomAug), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=1.0), + ]), + dict(type=GenerateTarget, encoder=codec), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] + +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.75, 1.25], + rotate_factor=60), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=YOLOXHSVRandomAug), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict(type=GenerateTarget, encoder=codec), + dict(type=PackPoseInputs) +] + +# train datasets +dataset_coco = dict( + type=RepeatDataset, + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_train2017.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], + ), + times=3) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=17, + mapping=[ + (0, 6), + (1, 8), + (2, 10), + (3, 5), + (4, 7), + (5, 9), + (6, 12), + (7, 14), + (8, 16), + (9, 11), + (10, 13), + (11, 15), + ]) + ], +) + +# data loaders +train_dataloader = dict( + batch_size=128 * 2, + num_workers=10, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco.py'), + datasets=[dataset_coco, dataset_aic], + pipeline=train_pipeline, + test_mode=False, + )) +val_dataloader = dict( + batch_size=64, + num_workers=10, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/person_keypoints_val2017.json', + # bbox_file='data/coco/person_detection_results/' + # 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='detection/coco/val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# hooks +default_hooks.update( + checkpoint=dict(save_best='coco/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoMetric, + ann_file=data_root + 'coco/annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py b/mmpose/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..1ecf3a704e160b85de8c2cff3fe7b72f04409a84 --- /dev/null +++ b/mmpose/configs/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w48_udp-8xb32-210e_coco-256x192.py @@ -0,0 +1,169 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * + +from mmengine.dataset import DefaultSampler +from mmengine.model import PretrainedInit +from mmengine.optim import LinearLR, MultiStepLR +from torch.optim import Adam + +from mmpose.codecs import UDPHeatmap +from mmpose.datasets import (CocoDataset, GenerateTarget, GetBBoxCenterScale, + LoadImage, PackPoseInputs, RandomFlip, + RandomHalfBody, TopdownAffine) +from mmpose.datasets.transforms.common_transforms import RandomBBoxTransform +from mmpose.evaluation import CocoMetric +from mmpose.models import (HeatmapHead, HRNet, KeypointMSELoss, + PoseDataPreprocessor, TopdownPoseEstimator) + +# runtime +train_cfg.update(max_epochs=210, val_interval=10) + +# optimizer +optim_wrapper = dict(optimizer=dict( + type=Adam, + lr=5e-4, +)) + +# learning policy +param_scheduler = [ + dict(type=LinearLR, begin=0, end=500, start_factor=0.001, + by_epoch=False), # warm-up + dict( + type=MultiStepLR, + begin=0, + end=210, + milestones=[170, 200], + gamma=0.1, + by_epoch=True) +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=512) + +# hooks +default_hooks.update(checkpoint=dict(save_best='coco/AP', rule='greater')) + +# codec settings +codec = dict( + type=UDPHeatmap, input_size=(192, 256), heatmap_size=(48, 64), sigma=2) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=HRNet, + in_channels=3, + extra=dict( + stage1=dict( + num_modules=1, + num_branches=1, + block='BOTTLENECK', + num_blocks=(4, ), + num_channels=(64, )), + stage2=dict( + num_modules=1, + num_branches=2, + block='BASIC', + num_blocks=(4, 4), + num_channels=(48, 96)), + stage3=dict( + num_modules=4, + num_branches=3, + block='BASIC', + num_blocks=(4, 4, 4), + num_channels=(48, 96, 192)), + stage4=dict( + num_modules=3, + num_branches=4, + block='BASIC', + num_blocks=(4, 4, 4, 4), + num_channels=(48, 96, 192, 384))), + init_cfg=dict( + type=PretrainedInit, + checkpoint='https://download.openmmlab.com/mmpose/' + 'pretrain_models/hrnet_w48-8ef0771d.pth'), + ), + head=dict( + type=HeatmapHead, + in_channels=48, + out_channels=17, + deconv_out_channels=None, + loss=dict(type=KeypointMSELoss, use_target_weight=True), + decoder=codec), + test_cfg=dict( + flip_test=True, + flip_mode='heatmap', + shift_heatmap=False, + )) + +# base dataset settings +dataset_type = CocoDataset +data_mode = 'topdown' +data_root = 'data/coco/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform), + dict(type=TopdownAffine, input_size=codec['input_size'], use_udp=True), + dict(type=GenerateTarget, encoder=codec), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size'], use_udp=True), + dict(type=PackPoseInputs) +] + +# data loaders +train_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_train2017.json', + data_prefix=dict(img='train2017/'), + pipeline=train_pipeline, + )) +val_dataloader = dict( + batch_size=32, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='annotations/person_keypoints_val2017.json', + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=val_pipeline, + )) +test_dataloader = val_dataloader + +# evaluators +val_evaluator = dict( + type=CocoMetric, + ann_file=data_root + 'annotations/person_keypoints_val2017.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb1024-270e_cocktail14-256x192.py b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb1024-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..a87290ecb60da744eca4bccaf47666222015029c --- /dev/null +++ b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb1024-270e_cocktail14-256x192.py @@ -0,0 +1,637 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * # noqa + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.engine.hooks import PipelineSwitchHook +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoWholeBodyDataset, COFWDataset, + CombinedDataset, CrowdPoseDataset, + Face300WDataset, GenerateTarget, + GetBBoxCenterScale, HalpeDataset, + HumanArt21Dataset, InterHand2DDoubleDataset, + JhmdbDataset, KeypointConverter, LapaDataset, + LoadImage, MpiiDataset, PackPoseInputs, + PoseTrack18Dataset, RandomFlip, RandomHalfBody, + TopdownAffine, UBody2dDataset, WFLWDataset) +from mmpose.datasets.transforms.common_transforms import ( + Albumentation, PhotometricDistortion, RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoWholeBodyMetric +from mmpose.models import (CSPNeXt, CSPNeXtPAFPN, KLDiscretLoss, + PoseDataPreprocessor, RTMWHead, + TopdownPoseEstimator) + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 1024 +val_batch_size = 32 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) # noqa +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=8192) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth' # noqa + )), + neck=dict( + type=CSPNeXtPAFPN, + in_channels=[256, 512, 1024], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU, inplace=True)), + head=dict( + type=RTMWHead, + in_channels=1024, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoWholeBodyDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PhotometricDistortion), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type=CrowdPoseDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type=MpiiDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type=JhmdbDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type=HalpeDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type=PoseTrack18Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type=HumanArt21Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type=UBody2dDataset, + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale, padding=1.25), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type=WFLWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type=Face300WDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type=COFWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type=LapaDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type=InterHand2DDoubleDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=CocoWholeBodyDataset, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks.update( # noqa + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoWholeBodyMetric, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb320-270e_cocktail14-384x288.py b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb320-270e_cocktail14-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..58172f7cc5c570db16c45869eb0f5a28410cb703 --- /dev/null +++ b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-l_8xb320-270e_cocktail14-384x288.py @@ -0,0 +1,637 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * # noqa + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.engine.hooks import PipelineSwitchHook +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoWholeBodyDataset, COFWDataset, + CombinedDataset, CrowdPoseDataset, + Face300WDataset, GenerateTarget, + GetBBoxCenterScale, HalpeDataset, + HumanArt21Dataset, InterHand2DDoubleDataset, + JhmdbDataset, KeypointConverter, LapaDataset, + LoadImage, MpiiDataset, PackPoseInputs, + PoseTrack18Dataset, RandomFlip, RandomHalfBody, + TopdownAffine, UBody2dDataset, WFLWDataset) +from mmpose.datasets.transforms.common_transforms import ( + Albumentation, PhotometricDistortion, RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoWholeBodyMetric +from mmpose.models import (CSPNeXt, CSPNeXtPAFPN, KLDiscretLoss, + PoseDataPreprocessor, RTMWHead, + TopdownPoseEstimator) + +# common setting +num_keypoints = 133 +input_size = (288, 384) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 320 +val_batch_size = 32 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) # noqa +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=2560) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=input_size, + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=1., + widen_factor=1., + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type='Pretrained', + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth' # noqa + )), + neck=dict( + type=CSPNeXtPAFPN, + in_channels=[256, 512, 1024], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU, inplace=True)), + head=dict( + type=RTMWHead, + in_channels=1024, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoWholeBodyDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PhotometricDistortion), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type=CrowdPoseDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type=MpiiDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type=JhmdbDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type=HalpeDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type=PoseTrack18Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type=HumanArt21Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type=UBody2dDataset, + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale, padding=1.25), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type=WFLWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type=Face300WDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type=COFWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type=LapaDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type=InterHand2DDoubleDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=CocoWholeBodyDataset, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks.update( # noqa + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoWholeBodyMetric, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-m_8xb1024-270e_cocktail14-256x192.py b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-m_8xb1024-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..dd46cce5ff8ecca298cb1d3427251ef7d5f8ec62 --- /dev/null +++ b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-m_8xb1024-270e_cocktail14-256x192.py @@ -0,0 +1,637 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * # noqa + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.engine.hooks import PipelineSwitchHook +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoWholeBodyDataset, COFWDataset, + CombinedDataset, CrowdPoseDataset, + Face300WDataset, GenerateTarget, + GetBBoxCenterScale, HalpeDataset, + HumanArt21Dataset, InterHand2DDoubleDataset, + JhmdbDataset, KeypointConverter, LapaDataset, + LoadImage, MpiiDataset, PackPoseInputs, + PoseTrack18Dataset, RandomFlip, RandomHalfBody, + TopdownAffine, UBody2dDataset, WFLWDataset) +from mmpose.datasets.transforms.common_transforms import ( + Albumentation, PhotometricDistortion, RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoWholeBodyMetric +from mmpose.models import (CSPNeXt, CSPNeXtPAFPN, KLDiscretLoss, + PoseDataPreprocessor, RTMWHead, + TopdownPoseEstimator) + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 1024 +val_batch_size = 32 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) # noqa +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.05), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=8192) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=0.67, + widen_factor=0.75, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/projects/' + 'rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth' # noqa + )), + neck=dict( + type=CSPNeXtPAFPN, + in_channels=[192, 384, 768], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU, inplace=True)), + head=dict( + type=RTMWHead, + in_channels=768, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoWholeBodyDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PhotometricDistortion), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type=CrowdPoseDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type=MpiiDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type=JhmdbDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type=HalpeDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type=PoseTrack18Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type=HumanArt21Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type=UBody2dDataset, + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale, padding=1.25), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type=WFLWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type=Face300WDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type=COFWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type=LapaDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type=InterHand2DDoubleDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=CocoWholeBodyDataset, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks.update( # noqa + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoWholeBodyMetric, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb320-270e_cocktail14-384x288.py b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb320-270e_cocktail14-384x288.py new file mode 100644 index 0000000000000000000000000000000000000000..73fe642366a6e5c87f5861b0a8b311510a1aff74 --- /dev/null +++ b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb320-270e_cocktail14-384x288.py @@ -0,0 +1,637 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * # noqa + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.engine.hooks import PipelineSwitchHook +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoWholeBodyDataset, COFWDataset, + CombinedDataset, CrowdPoseDataset, + Face300WDataset, GenerateTarget, + GetBBoxCenterScale, HalpeDataset, + HumanArt21Dataset, InterHand2DDoubleDataset, + JhmdbDataset, KeypointConverter, LapaDataset, + LoadImage, MpiiDataset, PackPoseInputs, + PoseTrack18Dataset, RandomFlip, RandomHalfBody, + TopdownAffine, UBody2dDataset, WFLWDataset) +from mmpose.datasets.transforms.common_transforms import ( + Albumentation, PhotometricDistortion, RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoWholeBodyMetric +from mmpose.models import (CSPNeXt, CSPNeXtPAFPN, KLDiscretLoss, + PoseDataPreprocessor, RTMWHead, + TopdownPoseEstimator) + +# common setting +num_keypoints = 133 +input_size = (288, 384) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 320 +val_batch_size = 32 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) # noqa +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=2560) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=input_size, + sigma=(6., 6.93), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=1.33, + widen_factor=1.25, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/' + 'wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_simcc-ucoco_pt-aic-coco_270e-384x288-f5b50679_20230822.pth' # noqa + )), + neck=dict( + type=CSPNeXtPAFPN, + in_channels=[320, 640, 1280], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU, inplace=True)), + head=dict( + type=RTMWHead, + in_channels=1280, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoWholeBodyDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PhotometricDistortion), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type=CrowdPoseDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type=MpiiDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type=JhmdbDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type=HalpeDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type=PoseTrack18Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type=HumanArt21Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type=UBody2dDataset, + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale, padding=1.25), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type=WFLWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type=Face300WDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type=COFWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type=LapaDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type=InterHand2DDoubleDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=CocoWholeBodyDataset, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks.update( # noqa + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoWholeBodyMetric, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb704-270e_cocktail14-256x192.py b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb704-270e_cocktail14-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..b4447fa1d7555b684cf98c7aed8bf83a562c072d --- /dev/null +++ b/mmpose/configs/wholebody_2d_keypoint/rtmpose/cocktail13/rtmw-x_8xb704-270e_cocktail14-256x192.py @@ -0,0 +1,637 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmengine.config import read_base + +with read_base(): + from mmpose.configs._base_.default_runtime import * # noqa + +from albumentations.augmentations import Blur, CoarseDropout, MedianBlur +from mmdet.engine.hooks import PipelineSwitchHook +from mmengine.dataset import DefaultSampler +from mmengine.hooks import EMAHook +from mmengine.model import PretrainedInit +from mmengine.optim import CosineAnnealingLR, LinearLR, OptimWrapper +from torch.nn import SiLU, SyncBatchNorm +from torch.optim import AdamW + +from mmpose.codecs import SimCCLabel +from mmpose.datasets import (AicDataset, CocoWholeBodyDataset, COFWDataset, + CombinedDataset, CrowdPoseDataset, + Face300WDataset, GenerateTarget, + GetBBoxCenterScale, HalpeDataset, + HumanArt21Dataset, InterHand2DDoubleDataset, + JhmdbDataset, KeypointConverter, LapaDataset, + LoadImage, MpiiDataset, PackPoseInputs, + PoseTrack18Dataset, RandomFlip, RandomHalfBody, + TopdownAffine, UBody2dDataset, WFLWDataset) +from mmpose.datasets.transforms.common_transforms import ( + Albumentation, PhotometricDistortion, RandomBBoxTransform) +from mmpose.engine.hooks import ExpMomentumEMA +from mmpose.evaluation import CocoWholeBodyMetric +from mmpose.models import (CSPNeXt, CSPNeXtPAFPN, KLDiscretLoss, + PoseDataPreprocessor, RTMWHead, + TopdownPoseEstimator) + +# common setting +num_keypoints = 133 +input_size = (192, 256) + +# runtime +max_epochs = 270 +stage2_num_epochs = 10 +base_lr = 5e-4 +train_batch_size = 704 +val_batch_size = 32 + +train_cfg.update(max_epochs=max_epochs, val_interval=10) # noqa +randomness = dict(seed=21) + +# optimizer +optim_wrapper = dict( + type=OptimWrapper, + optimizer=dict(type=AdamW, lr=base_lr, weight_decay=0.1), + clip_grad=dict(max_norm=35, norm_type=2), + paramwise_cfg=dict( + norm_decay_mult=0, bias_decay_mult=0, bypass_duplicate=True)) + +# learning rate +param_scheduler = [ + dict( + type=LinearLR, start_factor=1.0e-5, by_epoch=False, begin=0, end=1000), + dict( + type=CosineAnnealingLR, + eta_min=base_lr * 0.05, + begin=max_epochs // 2, + end=max_epochs, + T_max=max_epochs // 2, + by_epoch=True, + convert_to_iter_based=True), +] + +# automatically scaling LR based on the actual training batch size +auto_scale_lr = dict(base_batch_size=5632) + +# codec settings +codec = dict( + type=SimCCLabel, + input_size=input_size, + sigma=(4.9, 5.66), + simcc_split_ratio=2.0, + normalize=False, + use_dark=False) + +# model settings +model = dict( + type=TopdownPoseEstimator, + data_preprocessor=dict( + type=PoseDataPreprocessor, + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True), + backbone=dict( + type=CSPNeXt, + arch='P5', + expand_ratio=0.5, + deepen_factor=1.33, + widen_factor=1.25, + channel_attention=True, + norm_cfg=dict(type='BN'), + act_cfg=dict(type=SiLU), + init_cfg=dict( + type=PretrainedInit, + prefix='backbone.', + checkpoint='https://download.openmmlab.com/mmpose/v1/' + 'wholebody_2d_keypoint/rtmpose/ubody/rtmpose-x_simcc-ucoco_pt-aic-coco_270e-256x192-05f5bcb7_20230822.pth' # noqa + )), + neck=dict( + type=CSPNeXtPAFPN, + in_channels=[320, 640, 1280], + out_channels=None, + out_indices=( + 1, + 2, + ), + num_csp_blocks=2, + expand_ratio=0.5, + norm_cfg=dict(type=SyncBatchNorm), + act_cfg=dict(type=SiLU, inplace=True)), + head=dict( + type=RTMWHead, + in_channels=1280, + out_channels=num_keypoints, + input_size=input_size, + in_featuremap_size=tuple([s // 32 for s in input_size]), + simcc_split_ratio=codec['simcc_split_ratio'], + final_layer_kernel_size=7, + gau_cfg=dict( + hidden_dims=256, + s=128, + expansion_factor=2, + dropout_rate=0., + drop_path=0., + act_fn='SiLU', + use_rel_bias=False, + pos_enc=False), + loss=dict( + type=KLDiscretLoss, + use_target_weight=True, + beta=1., + label_softmax=True, + label_beta=10., + mask=list(range(23, 91)), + mask_weight=0.5, + ), + decoder=codec), + test_cfg=dict(flip_test=True)) + +# base dataset settings +dataset_type = CocoWholeBodyDataset +data_mode = 'topdown' +data_root = 'data/' + +backend_args = dict(backend='local') + +# pipelines +train_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict(type=RandomBBoxTransform, scale_factor=[0.5, 1.5], rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PhotometricDistortion), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + dict( + type=CoarseDropout, + max_holes=1, + max_height=0.4, + max_width=0.4, + min_holes=1, + min_height=0.2, + min_width=0.2, + p=0.5), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] +val_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict(type=PackPoseInputs) +] +train_pipeline_stage2 = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict(type=RandomFlip, direction='horizontal'), + dict(type=RandomHalfBody), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[0.5, 1.5], + rotate_factor=90), + dict(type=TopdownAffine, input_size=codec['input_size']), + dict( + type=Albumentation, + transforms=[ + dict(type=Blur, p=0.1), + dict(type=MedianBlur, p=0.1), + ]), + dict( + type=GenerateTarget, encoder=codec, use_dataset_keypoint_weights=True), + dict(type=PackPoseInputs) +] + +# mapping + +aic_coco133 = [(0, 6), (1, 8), (2, 10), (3, 5), (4, 7), (5, 9), (6, 12), + (7, 14), (8, 16), (9, 11), (10, 13), (11, 15)] + +crowdpose_coco133 = [(0, 5), (1, 6), (2, 7), (3, 8), (4, 9), (5, 10), (6, 11), + (7, 12), (8, 13), (9, 14), (10, 15), (11, 16)] + +mpii_coco133 = [ + (0, 16), + (1, 14), + (2, 12), + (3, 11), + (4, 13), + (5, 15), + (10, 10), + (11, 8), + (12, 6), + (13, 5), + (14, 7), + (15, 9), +] + +jhmdb_coco133 = [ + (3, 6), + (4, 5), + (5, 12), + (6, 11), + (7, 8), + (8, 7), + (9, 14), + (10, 13), + (11, 10), + (12, 9), + (13, 16), + (14, 15), +] + +halpe_coco133 = [(i, i) + for i in range(17)] + [(20, 17), (21, 20), (22, 18), (23, 21), + (24, 19), + (25, 22)] + [(i, i - 3) + for i in range(26, 136)] + +posetrack_coco133 = [ + (0, 0), + (3, 3), + (4, 4), + (5, 5), + (6, 6), + (7, 7), + (8, 8), + (9, 9), + (10, 10), + (11, 11), + (12, 12), + (13, 13), + (14, 14), + (15, 15), + (16, 16), +] + +humanart_coco133 = [(i, i) for i in range(17)] + [(17, 99), (18, 120), + (19, 17), (20, 20)] + +# train datasets +dataset_coco = dict( + type=dataset_type, + data_root=data_root, + data_mode=data_mode, + ann_file='coco/annotations/coco_wholebody_train_v1.0.json', + data_prefix=dict(img='detection/coco/train2017/'), + pipeline=[], +) + +dataset_aic = dict( + type=AicDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='aic/annotations/aic_train.json', + data_prefix=dict(img='pose/ai_challenge/ai_challenger_keypoint' + '_train_20170902/keypoint_train_images_20170902/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=aic_coco133) + ], +) + +dataset_crowdpose = dict( + type=CrowdPoseDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='crowdpose/annotations/mmpose_crowdpose_trainval.json', + data_prefix=dict(img='pose/CrowdPose/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=crowdpose_coco133) + ], +) + +dataset_mpii = dict( + type=MpiiDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='mpii/annotations/mpii_train.json', + data_prefix=dict(img='pose/MPI/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mpii_coco133) + ], +) + +dataset_jhmdb = dict( + type=JhmdbDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='jhmdb/annotations/Sub1_train.json', + data_prefix=dict(img='pose/JHMDB/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=jhmdb_coco133) + ], +) + +dataset_halpe = dict( + type=HalpeDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='halpe/annotations/halpe_train_v1.json', + data_prefix=dict(img='pose/Halpe/hico_20160224_det/images/train2015'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=halpe_coco133) + ], +) + +dataset_posetrack = dict( + type=PoseTrack18Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='posetrack18/annotations/posetrack18_train.json', + data_prefix=dict(img='pose/PoseChallenge2018/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=posetrack_coco133) + ], +) + +dataset_humanart = dict( + type=HumanArt21Dataset, + data_root=data_root, + data_mode=data_mode, + ann_file='HumanArt/annotations/training_humanart.json', + filter_cfg=dict(scenes=['real_human']), + data_prefix=dict(img='pose/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=humanart_coco133) + ]) + +ubody_scenes = [ + 'Magic_show', 'Entertainment', 'ConductMusic', 'Online_class', 'TalkShow', + 'Speech', 'Fitness', 'Interview', 'Olympic', 'TVShow', 'Singing', + 'SignLanguage', 'Movie', 'LiveVlog', 'VideoConference' +] + +ubody_datasets = [] +for scene in ubody_scenes: + each = dict( + type=UBody2dDataset, + data_root=data_root, + data_mode=data_mode, + ann_file=f'Ubody/annotations/{scene}/train_annotations.json', + data_prefix=dict(img='pose/UBody/images/'), + pipeline=[], + sample_interval=10) + ubody_datasets.append(each) + +dataset_ubody = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/ubody2d.py'), + datasets=ubody_datasets, + pipeline=[], + test_mode=False, +) + +face_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale, padding=1.25), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +wflw_coco133 = [(i * 2, 23 + i) + for i in range(17)] + [(33 + i, 40 + i) for i in range(5)] + [ + (42 + i, 45 + i) for i in range(5) + ] + [(51 + i, 50 + i) + for i in range(9)] + [(60, 59), (61, 60), (63, 61), + (64, 62), (65, 63), (67, 64), + (68, 65), (69, 66), (71, 67), + (72, 68), (73, 69), + (75, 70)] + [(76 + i, 71 + i) + for i in range(20)] +dataset_wflw = dict( + type=WFLWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='wflw/annotations/face_landmarks_wflw_train.json', + data_prefix=dict(img='pose/WFLW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=wflw_coco133), *face_pipeline + ], +) + +mapping_300w_coco133 = [(i, 23 + i) for i in range(68)] +dataset_300w = dict( + type=Face300WDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='300w/annotations/face_landmarks_300w_train.json', + data_prefix=dict(img='pose/300w/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=mapping_300w_coco133), *face_pipeline + ], +) + +cofw_coco133 = [(0, 40), (2, 44), (4, 42), (1, 49), (3, 45), (6, 47), (8, 59), + (10, 62), (9, 68), (11, 65), (18, 54), (19, 58), (20, 53), + (21, 56), (22, 71), (23, 77), (24, 74), (25, 85), (26, 89), + (27, 80), (28, 31)] +dataset_cofw = dict( + type=COFWDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='cofw/annotations/cofw_train.json', + data_prefix=dict(img='pose/COFW/images/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=cofw_coco133), *face_pipeline + ], +) + +lapa_coco133 = [(i * 2, 23 + i) for i in range(17)] + [ + (33 + i, 40 + i) for i in range(5) +] + [(42 + i, 45 + i) for i in range(5)] + [ + (51 + i, 50 + i) for i in range(4) +] + [(58 + i, 54 + i) for i in range(5)] + [(66, 59), (67, 60), (69, 61), + (70, 62), (71, 63), (73, 64), + (75, 65), (76, 66), (78, 67), + (79, 68), (80, 69), + (82, 70)] + [(84 + i, 71 + i) + for i in range(20)] +dataset_lapa = dict( + type=LapaDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='LaPa/annotations/lapa_trainval.json', + data_prefix=dict(img='pose/LaPa/'), + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=lapa_coco133), *face_pipeline + ], +) + +dataset_wb = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_coco, dataset_halpe, dataset_ubody], + pipeline=[], + test_mode=False, +) + +dataset_body = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_aic, + dataset_crowdpose, + dataset_mpii, + dataset_jhmdb, + dataset_posetrack, + dataset_humanart, + ], + pipeline=[], + test_mode=False, +) + +dataset_face = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[ + dataset_wflw, + dataset_300w, + dataset_cofw, + dataset_lapa, + ], + pipeline=[], + test_mode=False, +) + +hand_pipeline = [ + dict(type=LoadImage, backend_args=backend_args), + dict(type=GetBBoxCenterScale), + dict( + type=RandomBBoxTransform, + shift_factor=0., + scale_factor=[1.5, 2.0], + rotate_factor=0), +] + +interhand_left = [(21, 95), (22, 94), (23, 93), (24, 92), (25, 99), (26, 98), + (27, 97), (28, 96), (29, 103), (30, 102), (31, 101), + (32, 100), (33, 107), (34, 106), (35, 105), (36, 104), + (37, 111), (38, 110), (39, 109), (40, 108), (41, 91)] +interhand_right = [(i - 21, j + 21) for i, j in interhand_left] +interhand_coco133 = interhand_right + interhand_left + +dataset_interhand2d = dict( + type=InterHand2DDoubleDataset, + data_root=data_root, + data_mode=data_mode, + ann_file='interhand26m/annotations/all/InterHand2.6M_train_data.json', + camera_param_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_camera.json', + joint_file='interhand26m/annotations/all/' + 'InterHand2.6M_train_joint_3d.json', + data_prefix=dict(img='interhand2.6m/images/train/'), + sample_interval=10, + pipeline=[ + dict( + type=KeypointConverter, + num_keypoints=num_keypoints, + mapping=interhand_coco133, + ), *hand_pipeline + ], +) + +dataset_hand = dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=[dataset_interhand2d], + pipeline=[], + test_mode=False, +) + +train_datasets = [dataset_wb, dataset_body, dataset_face, dataset_hand] + +# data loaders +train_dataloader = dict( + batch_size=train_batch_size, + num_workers=4, + pin_memory=False, + persistent_workers=True, + sampler=dict(type=DefaultSampler, shuffle=True), + dataset=dict( + type=CombinedDataset, + metainfo=dict(from_file='configs/_base_/datasets/coco_wholebody.py'), + datasets=train_datasets, + pipeline=train_pipeline, + test_mode=False, + )) + +val_dataloader = dict( + batch_size=val_batch_size, + num_workers=4, + persistent_workers=True, + drop_last=False, + sampler=dict(type=DefaultSampler, shuffle=False, round_up=False), + dataset=dict( + type=CocoWholeBodyDataset, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json', + data_prefix=dict(img='data/detection/coco/val2017/'), + pipeline=val_pipeline, + bbox_file='data/coco/person_detection_results/' + 'COCO_val2017_detections_AP_H_56_person.json', + test_mode=True)) + +test_dataloader = val_dataloader + +# hooks +default_hooks.update( # noqa + checkpoint=dict( + save_best='coco-wholebody/AP', rule='greater', max_keep_ckpts=1)) + +custom_hooks = [ + dict( + type=EMAHook, + ema_type=ExpMomentumEMA, + momentum=0.0002, + update_buffers=True, + priority=49), + dict( + type=PipelineSwitchHook, + switch_epoch=max_epochs - stage2_num_epochs, + switch_pipeline=train_pipeline_stage2) +] + +# evaluators +val_evaluator = dict( + type=CocoWholeBodyMetric, + ann_file='data/coco/annotations/coco_wholebody_val_v1.0.json') +test_evaluator = val_evaluator diff --git a/mmpose/datasets/__init__.py b/mmpose/datasets/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..b90a12db4937ffca9ff103b1e5a0c7604de52e0b --- /dev/null +++ b/mmpose/datasets/__init__.py @@ -0,0 +1,8 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .builder import build_dataset +from .dataset_wrappers import CombinedDataset +from .datasets import * # noqa +from .samplers import MultiSourceSampler +from .transforms import * # noqa + +__all__ = ['build_dataset', 'CombinedDataset', 'MultiSourceSampler'] diff --git a/mmpose/datasets/builder.py b/mmpose/datasets/builder.py new file mode 100644 index 0000000000000000000000000000000000000000..2e5a236ff49b70b86149d318cbccdfd5af5a6450 --- /dev/null +++ b/mmpose/datasets/builder.py @@ -0,0 +1,90 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import copy +import platform +import random + +import numpy as np +import torch +from mmengine import build_from_cfg, is_seq_of +from mmengine.dataset import ConcatDataset, RepeatDataset + +from mmpose.registry import DATASETS + +if platform.system() != 'Windows': + # https://github.com/pytorch/pytorch/issues/973 + import resource + rlimit = resource.getrlimit(resource.RLIMIT_NOFILE) + base_soft_limit = rlimit[0] + hard_limit = rlimit[1] + soft_limit = min(max(4096, base_soft_limit), hard_limit) + resource.setrlimit(resource.RLIMIT_NOFILE, (soft_limit, hard_limit)) + + +def _concat_dataset(cfg, default_args=None): + types = cfg['type'] + ann_files = cfg['ann_file'] + img_prefixes = cfg.get('img_prefix', None) + dataset_infos = cfg.get('dataset_info', None) + + num_joints = cfg['data_cfg'].get('num_joints', None) + dataset_channel = cfg['data_cfg'].get('dataset_channel', None) + + datasets = [] + num_dset = len(ann_files) + for i in range(num_dset): + cfg_copy = copy.deepcopy(cfg) + cfg_copy['ann_file'] = ann_files[i] + + if isinstance(types, (list, tuple)): + cfg_copy['type'] = types[i] + if isinstance(img_prefixes, (list, tuple)): + cfg_copy['img_prefix'] = img_prefixes[i] + if isinstance(dataset_infos, (list, tuple)): + cfg_copy['dataset_info'] = dataset_infos[i] + + if isinstance(num_joints, (list, tuple)): + cfg_copy['data_cfg']['num_joints'] = num_joints[i] + + if is_seq_of(dataset_channel, list): + cfg_copy['data_cfg']['dataset_channel'] = dataset_channel[i] + + datasets.append(build_dataset(cfg_copy, default_args)) + + return ConcatDataset(datasets) + + +def build_dataset(cfg, default_args=None): + """Build a dataset from config dict. + + Args: + cfg (dict): Config dict. It should at least contain the key "type". + default_args (dict, optional): Default initialization arguments. + Default: None. + + Returns: + Dataset: The constructed dataset. + """ + + if isinstance(cfg, (list, tuple)): + dataset = ConcatDataset([build_dataset(c, default_args) for c in cfg]) + elif cfg['type'] == 'ConcatDataset': + dataset = ConcatDataset( + [build_dataset(c, default_args) for c in cfg['datasets']]) + elif cfg['type'] == 'RepeatDataset': + dataset = RepeatDataset( + build_dataset(cfg['dataset'], default_args), cfg['times']) + elif isinstance(cfg.get('ann_file'), (list, tuple)): + dataset = _concat_dataset(cfg, default_args) + else: + dataset = build_from_cfg(cfg, DATASETS, default_args) + return dataset + + +def worker_init_fn(worker_id, num_workers, rank, seed): + """Init the random seed for various workers.""" + # The seed of each worker equals to + # num_worker * rank + worker_id + user_seed + worker_seed = num_workers * rank + worker_id + seed + np.random.seed(worker_seed) + random.seed(worker_seed) + torch.manual_seed(worker_seed) diff --git a/mmpose/datasets/dataset_wrappers.py b/mmpose/datasets/dataset_wrappers.py new file mode 100644 index 0000000000000000000000000000000000000000..626658c104e62eb5699d5e9d4f715ca4f2135bbd --- /dev/null +++ b/mmpose/datasets/dataset_wrappers.py @@ -0,0 +1,155 @@ +# Copyright (c) OpenMMLab. All rights reserved. + +from copy import deepcopy +from typing import Any, Callable, List, Optional, Tuple, Union + +import numpy as np +from mmengine.dataset import BaseDataset +from mmengine.registry import build_from_cfg + +from mmpose.registry import DATASETS +from .datasets.utils import parse_pose_metainfo + + +@DATASETS.register_module() +class CombinedDataset(BaseDataset): + """A wrapper of combined dataset. + + Args: + metainfo (dict): The meta information of combined dataset. + datasets (list): The configs of datasets to be combined. + pipeline (list, optional): Processing pipeline. Defaults to []. + sample_ratio_factor (list, optional): A list of sampling ratio + factors for each dataset. Defaults to None + """ + + def __init__(self, + metainfo: dict, + datasets: list, + pipeline: List[Union[dict, Callable]] = [], + sample_ratio_factor: Optional[List[float]] = None, + **kwargs): + + self.datasets = [] + self.resample = sample_ratio_factor is not None + + for cfg in datasets: + dataset = build_from_cfg(cfg, DATASETS) + self.datasets.append(dataset) + + self._lens = [len(dataset) for dataset in self.datasets] + if self.resample: + assert len(sample_ratio_factor) == len(datasets), f'the length ' \ + f'of `sample_ratio_factor` {len(sample_ratio_factor)} does ' \ + f'not match the length of `datasets` {len(datasets)}' + assert min(sample_ratio_factor) >= 0.0, 'the ratio values in ' \ + '`sample_ratio_factor` should not be negative.' + self._lens_ori = self._lens + self._lens = [ + round(l * sample_ratio_factor[i]) + for i, l in enumerate(self._lens_ori) + ] + + self._len = sum(self._lens) + + super(CombinedDataset, self).__init__(pipeline=pipeline, **kwargs) + self._metainfo = parse_pose_metainfo(metainfo) + + print("CombinedDataset initialized\n\tlen: {}\n\tlens: {}".format(self._len, self._lens)) + + @property + def metainfo(self): + return deepcopy(self._metainfo) + + def __len__(self): + return self._len + + def _get_subset_index(self, index: int) -> Tuple[int, int]: + """Given a data sample's global index, return the index of the sub- + dataset the data sample belongs to, and the local index within that + sub-dataset. + + Args: + index (int): The global data sample index + + Returns: + tuple[int, int]: + - subset_index (int): The index of the sub-dataset + - local_index (int): The index of the data sample within + the sub-dataset + """ + if index >= len(self) or index < -len(self): + raise ValueError( + f'index({index}) is out of bounds for dataset with ' + f'length({len(self)}).') + + if index < 0: + index = index + len(self) + + subset_index = 0 + while index >= self._lens[subset_index]: + index -= self._lens[subset_index] + subset_index += 1 + + if self.resample: + gap = (self._lens_ori[subset_index] - + 1e-4) / self._lens[subset_index] + index = round(gap * index + np.random.rand() * gap - 0.5) + + return subset_index, index + + def prepare_data(self, idx: int) -> Any: + """Get data processed by ``self.pipeline``.The source dataset is + depending on the index. + + Args: + idx (int): The index of ``data_info``. + + Returns: + Any: Depends on ``self.pipeline``. + """ + + data_info = self.get_data_info(idx) + + # the assignment of 'dataset' should not be performed within the + # `get_data_info` function. Otherwise, it can lead to the mixed + # data augmentation process getting stuck. + data_info['dataset'] = self + + return self.pipeline(data_info) + + def get_data_info(self, idx: int) -> dict: + """Get annotation by index. + + Args: + idx (int): Global index of ``CombinedDataset``. + Returns: + dict: The idx-th annotation of the datasets. + """ + subset_idx, sample_idx = self._get_subset_index(idx) + # Get data sample processed by ``subset.pipeline`` + data_info = self.datasets[subset_idx][sample_idx] + + if 'dataset' in data_info: + data_info.pop('dataset') + + # Add metainfo items that are required in the pipeline and the model + metainfo_keys = [ + 'upper_body_ids', 'lower_body_ids', 'flip_pairs', + 'dataset_keypoint_weights', 'flip_indices' + ] + + for key in metainfo_keys: + data_info[key] = deepcopy(self._metainfo[key]) + + return data_info + + def full_init(self): + """Fully initialize all sub datasets.""" + + if self._fully_initialized: + return + + for dataset in self.datasets: + dataset.full_init() + self._fully_initialized = True diff --git a/mmpose/datasets/datasets/__init__.py b/mmpose/datasets/datasets/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..f0709ab32f265fce2144703e96ff60d487a6d463 --- /dev/null +++ b/mmpose/datasets/datasets/__init__.py @@ -0,0 +1,11 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .animal import * # noqa: F401, F403 +from .base import * # noqa: F401, F403 +from .body import * # noqa: F401, F403 +from .body3d import * # noqa: F401, F403 +from .face import * # noqa: F401, F403 +from .fashion import * # noqa: F401, F403 +from .hand import * # noqa: F401, F403 +from .hand3d import * # noqa: F401, F403 +from .wholebody import * # noqa: F401, F403 +from .wholebody3d import * # noqa: F401, F403 diff --git a/mmpose/datasets/datasets/animal/__init__.py b/mmpose/datasets/datasets/animal/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..669f08cddd0ca10756867af160c55303c8a8ac20 --- /dev/null +++ b/mmpose/datasets/datasets/animal/__init__.py @@ -0,0 +1,16 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from .animalkingdom_dataset import AnimalKingdomDataset +from .animalpose_dataset import AnimalPoseDataset +from .ap10k_dataset import AP10KDataset +from .atrw_dataset import ATRWDataset +from .fly_dataset import FlyDataset +from .horse10_dataset import Horse10Dataset +from .locust_dataset import LocustDataset +from .macaque_dataset import MacaqueDataset +from .zebra_dataset import ZebraDataset + +__all__ = [ + 'AnimalPoseDataset', 'AP10KDataset', 'Horse10Dataset', 'MacaqueDataset', + 'FlyDataset', 'LocustDataset', 'ZebraDataset', 'ATRWDataset', + 'AnimalKingdomDataset' +] diff --git a/mmpose/datasets/datasets/animal/animalkingdom_dataset.py b/mmpose/datasets/datasets/animal/animalkingdom_dataset.py new file mode 100644 index 0000000000000000000000000000000000000000..35ccb8b67a5b607e91f5120b2bc6c21e3d3eba39 --- /dev/null +++ b/mmpose/datasets/datasets/animal/animalkingdom_dataset.py @@ -0,0 +1,86 @@ +# Copyright (c) OpenMMLab. All rights reserved. +from mmpose.registry import DATASETS +from ..base import BaseCocoStyleDataset + + +@DATASETS.register_module() +class AnimalKingdomDataset(BaseCocoStyleDataset): + """Animal Kingdom dataset for animal pose estimation. + + "[CVPR2022] Animal Kingdom: + A Large and Diverse Dataset for Animal Behavior Understanding" + More details can be found in the `paper +
+
+
+
+
+[](https://mmpose.readthedocs.io/en/latest/?badge=latest)
+[](https://github.com/open-mmlab/mmpose/actions)
+[](https://codecov.io/gh/open-mmlab/mmpose)
+[](https://pypi.org/project/mmpose/)
+[](https://github.com/open-mmlab/mmpose/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://github.com/open-mmlab/mmpose/issues)
+[](https://openxlab.org.cn/apps?search=mmpose)
+
+[📘Documentation](https://mmpose.readthedocs.io/en/latest/) |
+[🛠️Installation](https://mmpose.readthedocs.io/en/latest/installation.html) |
+[👀Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo.html) |
+[📜Papers](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html) |
+[🆕Update News](https://mmpose.readthedocs.io/en/latest/notes/changelog.html) |
+[🤔Reporting Issues](https://github.com/open-mmlab/mmpose/issues/new/choose) |
+[🔥RTMPose](/projects/rtmpose/)
+
+
+
+
+
+## Introduction
+
+English | [简体中文](README_CN.md)
+
+MMPose is an open-source toolbox for pose estimation based on PyTorch.
+It is a part of the [OpenMMLab project](https://github.com/open-mmlab).
+
+The main branch works with **PyTorch 1.8+**.
+
+https://user-images.githubusercontent.com/15977946/124654387-0fd3c500-ded1-11eb-84f6-24eeddbf4d91.mp4
+
+
+ OpenMMLab website
+
+
+ HOT
+
+
+
+ OpenMMLab platform
+
+
+ TRY IT OUT
+
+
+
+ + +
+
+
+## What's New
+
+- Release [RTMO](/projects/rtmo), a state-of-the-art real-time method for multi-person pose estimation.
+
+ 
+
+- Release [RTMW](/configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.md) models in various sizes ranging from RTMW-m to RTMW-x. The input sizes include `256x192` and `384x288`. This provides flexibility to select the right model for different speed and accuracy requirements.
+
+- Support inference of [PoseAnything](/projects/pose_anything). Web demo is available [here](https://openxlab.org.cn/apps/detail/orhir/Pose-Anything).
+
+- Support for two new datasets:
+
+ - (CVPR 2023) [ExLPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#exlpose-dataset)
+ - (ICCV 2023) [H3WB](/docs/en/dataset_zoo/3d_wholebody_keypoint.md)
+
+- Welcome to use the [*MMPose project*](/projects/README.md). Here, you can discover the latest features and algorithms in MMPose and quickly share your ideas and code implementations with the community. Adding new features to MMPose has become smoother:
+
+ - Provides a simple and fast way to add new algorithms, features, and applications to MMPose.
+ - More flexible code structure and style, fewer restrictions, and a shorter code review process.
+ - Utilize the powerful capabilities of MMPose in the form of independent projects without being constrained by the code framework.
+ - Newly added projects include:
+ - [RTMPose](/projects/rtmpose/)
+ - [RTMO](/projects/rtmo/)
+ - [PoseAnything](/projects/pose_anything/)
+ - [YOLOX-Pose](/projects/yolox_pose/)
+ - [MMPose4AIGC](/projects/mmpose4aigc/)
+ - [Simple Keypoints](/projects/skps/)
+ - [Just Dance](/projects/just_dance/)
+ - [Uniformer](/projects/uniformer/)
+ - Start your journey as an MMPose contributor with a simple [example project](/projects/example_project/), and let's build a better MMPose together!
+
+Major Features
+ +- **Support diverse tasks** + + We support a wide spectrum of mainstream pose analysis tasks in current research community, including 2d multi-person human pose estimation, 2d hand pose estimation, 2d face landmark detection, 133 keypoint whole-body human pose estimation, 3d human mesh recovery, fashion landmark detection and animal pose estimation. + See [Demo](demo/docs/en) for more information. + +- **Higher efficiency and higher accuracy** + + MMPose implements multiple state-of-the-art (SOTA) deep learning models, including both top-down & bottom-up approaches. We achieve faster training speed and higher accuracy than other popular codebases, such as [HRNet](https://github.com/leoxiaobin/deep-high-resolution-net.pytorch). + See [benchmark.md](docs/en/notes/benchmark.md) for more information. + +- **Support for various datasets** + + The toolbox directly supports multiple popular and representative datasets, COCO, AIC, MPII, MPII-TRB, OCHuman etc. + See [dataset_zoo](docs/en/dataset_zoo) for more information. + +- **Well designed, tested and documented** + + We decompose MMPose into different components and one can easily construct a customized + pose estimation framework by combining different modules. + We provide detailed documentation and API reference, as well as unittests. + ++ +- January 4, 2024: MMPose [v1.3.0](https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0) has been officially released, with major updates including: + + - Support for new datasets: ExLPose, H3WB + - Release of new RTMPose series models: RTMO, RTMW + - Support for new algorithm PoseAnything + - Enhanced Inferencer with optional progress bar and improved affinity for one-stage methods + + Please check the complete [release notes](https://github.com/open-mmlab/mmpose/releases/tag/v1.3.0) for more details on the updates brought by MMPose v1.3.0! + +## 0.x / 1.x Migration + +MMPose v1.0.0 is a major update, including many API and config file changes. Currently, a part of the algorithms have been migrated to v1.0.0, and the remaining algorithms will be completed in subsequent versions. We will show the migration progress in this [Roadmap](https://github.com/open-mmlab/mmpose/issues/2258). + +If your algorithm has not been migrated, you can continue to use the [0.x branch](https://github.com/open-mmlab/mmpose/tree/0.x) and [old documentation](https://mmpose.readthedocs.io/en/0.x/). + +## Installation + +Please refer to [installation.md](https://mmpose.readthedocs.io/en/latest/installation.html) for more detailed installation and dataset preparation. + +## Getting Started + +We provided a series of tutorials about the basic usage of MMPose for new users: + +1. For the basic usage of MMPose: + + - [A 20-minute Tour to MMPose](https://mmpose.readthedocs.io/en/latest/guide_to_framework.html) + - [Demos](https://mmpose.readthedocs.io/en/latest/demos.html) + - [Inference](https://mmpose.readthedocs.io/en/latest/user_guides/inference.html) + - [Configs](https://mmpose.readthedocs.io/en/latest/user_guides/configs.html) + - [Prepare Datasets](https://mmpose.readthedocs.io/en/latest/user_guides/prepare_datasets.html) + - [Train and Test](https://mmpose.readthedocs.io/en/latest/user_guides/train_and_test.html) + - [Deployment](https://mmpose.readthedocs.io/en/latest/user_guides/how_to_deploy.html) + - [Model Analysis](https://mmpose.readthedocs.io/en/latest/user_guides/model_analysis.html) + - [Dataset Annotation and Preprocessing](https://mmpose.readthedocs.io/en/latest/user_guides/dataset_tools.html) + +2. For developers who wish to develop based on MMPose: + + - [Learn about Codecs](https://mmpose.readthedocs.io/en/latest/advanced_guides/codecs.html) + - [Dataflow in MMPose](https://mmpose.readthedocs.io/en/latest/advanced_guides/dataflow.html) + - [Implement New Models](https://mmpose.readthedocs.io/en/latest/advanced_guides/implement_new_models.html) + - [Customize Datasets](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_datasets.html) + - [Customize Data Transforms](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_transforms.html) + - [Customize Evaluation](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_evaluation.html) + - [Customize Optimizer](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_optimizer.html) + - [Customize Logging](https://mmpose.readthedocs.io/en/latest/advanced_guides/customize_logging.html) + - [How to Deploy](https://mmpose.readthedocs.io/en/latest/user_guides/how_to_deploy.html) + - [Model Analysis](https://mmpose.readthedocs.io/en/latest/user_guides/model_analysis.html) + - [Migration Guide](https://mmpose.readthedocs.io/en/latest/migration.html) + +3. For researchers and developers who are willing to contribute to MMPose: + + - [Contribution Guide](https://mmpose.readthedocs.io/en/latest/contribution_guide.html) + +4. For some common issues, we provide a FAQ list: + + - [FAQ](https://mmpose.readthedocs.io/en/latest/faq.html) + +## Model Zoo + +Results and models are available in the **README.md** of each method's config directory. +A summary can be found in the [Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo.html) page. + +
+
+
+Supported algorithms:
+ +- [x] [DeepPose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#deeppose-cvpr-2014) (CVPR'2014) +- [x] [CPM](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#cpm-cvpr-2016) (CVPR'2016) +- [x] [Hourglass](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hourglass-eccv-2016) (ECCV'2016) +- [x] [SimpleBaseline3D](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#simplebaseline3d-iccv-2017) (ICCV'2017) +- [ ] [Associative Embedding](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#associative-embedding-nips-2017) (NeurIPS'2017) +- [x] [SimpleBaseline2D](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#simplebaseline2d-eccv-2018) (ECCV'2018) +- [x] [DSNT](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#dsnt-2018) (ArXiv'2021) +- [x] [HRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hrnet-cvpr-2019) (CVPR'2019) +- [x] [IPR](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#ipr-eccv-2018) (ECCV'2018) +- [x] [VideoPose3D](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#videopose3d-cvpr-2019) (CVPR'2019) +- [x] [HRNetv2](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hrnetv2-tpami-2019) (TPAMI'2019) +- [x] [MSPN](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#mspn-arxiv-2019) (ArXiv'2019) +- [x] [SCNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#scnet-cvpr-2020) (CVPR'2020) +- [ ] [HigherHRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#higherhrnet-cvpr-2020) (CVPR'2020) +- [x] [RSN](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#rsn-eccv-2020) (ECCV'2020) +- [x] [InterNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#internet-eccv-2020) (ECCV'2020) +- [ ] [VoxelPose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#voxelpose-eccv-2020) (ECCV'2020) +- [x] [LiteHRNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#litehrnet-cvpr-2021) (CVPR'2021) +- [x] [ViPNAS](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#vipnas-cvpr-2021) (CVPR'2021) +- [x] [Debias-IPR](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#debias-ipr-iccv-2021) (ICCV'2021) +- [x] [SimCC](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html#simcc-eccv-2022) (ECCV'2022) + +
+
+
+Supported techniques:
+ +- [x] [FPN](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#fpn-cvpr-2017) (CVPR'2017) +- [x] [FP16](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#fp16-arxiv-2017) (ArXiv'2017) +- [x] [Wingloss](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#wingloss-cvpr-2018) (CVPR'2018) +- [x] [AdaptiveWingloss](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#adaptivewingloss-iccv-2019) (ICCV'2019) +- [x] [DarkPose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#darkpose-cvpr-2020) (CVPR'2020) +- [x] [UDP](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#udp-cvpr-2020) (CVPR'2020) +- [x] [Albumentations](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#albumentations-information-2020) (Information'2020) +- [x] [SoftWingloss](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#softwingloss-tip-2021) (TIP'2021) +- [x] [RLE](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/techniques.html#rle-iccv-2021) (ICCV'2021) + +
+
+
+Supported datasets:
+ +- [x] [AFLW](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#aflw-iccvw-2011) \[[homepage](https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/aflw/)\] (ICCVW'2011) +- [x] [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#jhmdb-iccv-2013) \[[homepage](http://jhmdb.is.tue.mpg.de/dataset)\] (ICCV'2013) +- [x] [COFW](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#cofw-iccv-2013) \[[homepage](http://www.vision.caltech.edu/xpburgos/ICCV13/)\] (ICCV'2013) +- [x] [MPII](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#mpii-cvpr-2014) \[[homepage](http://human-pose.mpi-inf.mpg.de/)\] (CVPR'2014) +- [x] [Human3.6M](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#human3-6m-tpami-2014) \[[homepage](http://vision.imar.ro/human3.6m/description.php)\] (TPAMI'2014) +- [x] [COCO](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#coco-eccv-2014) \[[homepage](http://cocodataset.org/)\] (ECCV'2014) +- [x] [CMU Panoptic](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#cmu-panoptic-iccv-2015) \[[homepage](http://domedb.perception.cs.cmu.edu/)\] (ICCV'2015) +- [x] [DeepFashion](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#deepfashion-cvpr-2016) \[[homepage](http://mmlab.ie.cuhk.edu.hk/projects/DeepFashion/LandmarkDetection.html)\] (CVPR'2016) +- [x] [300W](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#300w-imavis-2016) \[[homepage](https://ibug.doc.ic.ac.uk/resources/300-W/)\] (IMAVIS'2016) +- [x] [RHD](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#rhd-iccv-2017) \[[homepage](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html)\] (ICCV'2017) +- [x] [CMU Panoptic HandDB](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#cmu-panoptic-handdb-cvpr-2017) \[[homepage](http://domedb.perception.cs.cmu.edu/handdb.html)\] (CVPR'2017) +- [x] [AI Challenger](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#ai-challenger-arxiv-2017) \[[homepage](https://github.com/AIChallenger/AI_Challenger_2017)\] (ArXiv'2017) +- [x] [MHP](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#mhp-acm-mm-2018) \[[homepage](https://lv-mhp.github.io/dataset)\] (ACM MM'2018) +- [x] [WFLW](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#wflw-cvpr-2018) \[[homepage](https://wywu.github.io/projects/LAB/WFLW.html)\] (CVPR'2018) +- [x] [PoseTrack18](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#posetrack18-cvpr-2018) \[[homepage](https://posetrack.net/users/download.php)\] (CVPR'2018) +- [x] [OCHuman](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#ochuman-cvpr-2019) \[[homepage](https://github.com/liruilong940607/OCHumanApi)\] (CVPR'2019) +- [x] [CrowdPose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#crowdpose-cvpr-2019) \[[homepage](https://github.com/Jeff-sjtu/CrowdPose)\] (CVPR'2019) +- [x] [MPII-TRB](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#mpii-trb-iccv-2019) \[[homepage](https://github.com/kennymckormick/Triplet-Representation-of-human-Body)\] (ICCV'2019) +- [x] [FreiHand](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#freihand-iccv-2019) \[[homepage](https://lmb.informatik.uni-freiburg.de/projects/freihand/)\] (ICCV'2019) +- [x] [Animal-Pose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#animal-pose-iccv-2019) \[[homepage](https://sites.google.com/view/animal-pose/)\] (ICCV'2019) +- [x] [OneHand10K](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#onehand10k-tcsvt-2019) \[[homepage](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html)\] (TCSVT'2019) +- [x] [Vinegar Fly](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#vinegar-fly-nature-methods-2019) \[[homepage](https://github.com/jgraving/DeepPoseKit-Data)\] (Nature Methods'2019) +- [x] [Desert Locust](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#desert-locust-elife-2019) \[[homepage](https://github.com/jgraving/DeepPoseKit-Data)\] (Elife'2019) +- [x] [Grévy’s Zebra](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#grevys-zebra-elife-2019) \[[homepage](https://github.com/jgraving/DeepPoseKit-Data)\] (Elife'2019) +- [x] [ATRW](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#atrw-acm-mm-2020) \[[homepage](https://cvwc2019.github.io/challenge.html)\] (ACM MM'2020) +- [x] [Halpe](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#halpe-cvpr-2020) \[[homepage](https://github.com/Fang-Haoshu/Halpe-FullBody/)\] (CVPR'2020) +- [x] [COCO-WholeBody](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#coco-wholebody-eccv-2020) \[[homepage](https://github.com/jin-s13/COCO-WholeBody/)\] (ECCV'2020) +- [x] [MacaquePose](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#macaquepose-biorxiv-2020) \[[homepage](http://www.pri.kyoto-u.ac.jp/datasets/macaquepose/index.html)\] (bioRxiv'2020) +- [x] [InterHand2.6M](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#interhand2-6m-eccv-2020) \[[homepage](https://mks0601.github.io/InterHand2.6M/)\] (ECCV'2020) +- [x] [AP-10K](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#ap-10k-neurips-2021) \[[homepage](https://github.com/AlexTheBad/AP-10K)\] (NeurIPS'2021) +- [x] [Horse-10](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#horse-10-wacv-2021) \[[homepage](http://www.mackenziemathislab.org/horse10)\] (WACV'2021) +- [x] [Human-Art](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#human-art-cvpr-2023) \[[homepage](https://idea-research.github.io/HumanArt/)\] (CVPR'2023) +- [x] [LaPa](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#lapa-aaai-2020) \[[homepage](https://github.com/JDAI-CV/lapa-dataset)\] (AAAI'2020) +- [x] [UBody](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/datasets.html#ubody-cvpr-2023) \[[homepage](https://github.com/IDEA-Research/OSX)\] (CVPR'2023) + +
+
+
+### Model Request
+
+We will keep up with the latest progress of the community, and support more popular algorithms and frameworks. If you have any feature requests, please feel free to leave a comment in [MMPose Roadmap](https://github.com/open-mmlab/mmpose/issues/2258).
+
+## Contributing
+
+We appreciate all contributions to improve MMPose. Please refer to [CONTRIBUTING.md](https://mmpose.readthedocs.io/en/latest/contribution_guide.html) for the contributing guideline.
+
+## Acknowledgement
+
+MMPose is an open source project that is contributed by researchers and engineers from various colleges and companies.
+We appreciate all the contributors who implement their methods or add new features, as well as users who give valuable feedbacks.
+We wish that the toolbox and benchmark could serve the growing research community by providing a flexible toolkit to reimplement existing methods and develop their own new models.
+
+## Citation
+
+If you find this project useful in your research, please consider cite:
+
+```bibtex
+@misc{mmpose2020,
+ title={OpenMMLab Pose Estimation Toolbox and Benchmark},
+ author={MMPose Contributors},
+ howpublished = {\url{https://github.com/open-mmlab/mmpose}},
+ year={2020}
+}
+```
+
+## License
+
+This project is released under the [Apache 2.0 license](LICENSE).
+
+## Projects in OpenMMLab
+
+- [MMEngine](https://github.com/open-mmlab/mmengine): OpenMMLab foundational library for training deep learning models.
+- [MMCV](https://github.com/open-mmlab/mmcv): OpenMMLab foundational library for computer vision.
+- [MMPreTrain](https://github.com/open-mmlab/mmpretrain): OpenMMLab pre-training toolbox and benchmark.
+- [MMagic](https://github.com/open-mmlab/mmagic): Open**MM**Lab **A**dvanced, **G**enerative and **I**ntelligent **C**reation toolbox.
+- [MMDetection](https://github.com/open-mmlab/mmdetection): OpenMMLab detection toolbox and benchmark.
+- [MMDetection3D](https://github.com/open-mmlab/mmdetection3d): OpenMMLab's next-generation platform for general 3D object detection.
+- [MMRotate](https://github.com/open-mmlab/mmrotate): OpenMMLab rotated object detection toolbox and benchmark.
+- [MMTracking](https://github.com/open-mmlab/mmtracking): OpenMMLab video perception toolbox and benchmark.
+- [MMSegmentation](https://github.com/open-mmlab/mmsegmentation): OpenMMLab semantic segmentation toolbox and benchmark.
+- [MMOCR](https://github.com/open-mmlab/mmocr): OpenMMLab text detection, recognition, and understanding toolbox.
+- [MMPose](https://github.com/open-mmlab/mmpose): OpenMMLab pose estimation toolbox and benchmark.
+- [MMHuman3D](https://github.com/open-mmlab/mmhuman3d): OpenMMLab 3D human parametric model toolbox and benchmark.
+- [MMFewShot](https://github.com/open-mmlab/mmfewshot): OpenMMLab fewshot learning toolbox and benchmark.
+- [MMAction2](https://github.com/open-mmlab/mmaction2): OpenMMLab's next-generation action understanding toolbox and benchmark.
+- [MMFlow](https://github.com/open-mmlab/mmflow): OpenMMLab optical flow toolbox and benchmark.
+- [MMDeploy](https://github.com/open-mmlab/mmdeploy): OpenMMLab Model Deployment Framework.
+- [MMRazor](https://github.com/open-mmlab/mmrazor): OpenMMLab model compression toolbox and benchmark.
+- [MIM](https://github.com/open-mmlab/mim): MIM installs OpenMMLab packages.
+- [Playground](https://github.com/open-mmlab/playground): A central hub for gathering and showcasing amazing projects built upon OpenMMLab.
diff --git a/model-index.yml b/model-index.yml
new file mode 100644
index 0000000000000000000000000000000000000000..363ab89f08f92cd1cdc23344da4a8d8c40295b29
--- /dev/null
+++ b/model-index.yml
@@ -0,0 +1,148 @@
+Import:
+- configs/animal_2d_keypoint/rtmpose/ap10k/rtmpose_ap10k.yml
+- configs/animal_2d_keypoint/topdown_heatmap/ak/hrnet_animalkingdom.yml
+- configs/animal_2d_keypoint/topdown_heatmap/animalpose/hrnet_animalpose.yml
+- configs/animal_2d_keypoint/topdown_heatmap/animalpose/resnet_animalpose.yml
+- configs/animal_2d_keypoint/topdown_heatmap/ap10k/cspnext_udp_ap10k.yml
+- configs/animal_2d_keypoint/topdown_heatmap/ap10k/hrnet_ap10k.yml
+- configs/animal_2d_keypoint/topdown_heatmap/ap10k/resnet_ap10k.yml
+- configs/animal_2d_keypoint/topdown_heatmap/locust/resnet_locust.yml
+- configs/animal_2d_keypoint/topdown_heatmap/zebra/resnet_zebra.yml
+- configs/body_2d_keypoint/associative_embedding/coco/hrnet_coco.yml
+- configs/body_2d_keypoint/cid/coco/hrnet_coco.yml
+- configs/body_2d_keypoint/dekr/coco/hrnet_coco.yml
+- configs/body_2d_keypoint/dekr/crowdpose/hrnet_crowdpose.yml
+- configs/body_2d_keypoint/edpose/coco/edpose_coco.yml
+- configs/body_2d_keypoint/integral_regression/coco/resnet_debias_coco.yml
+- configs/body_2d_keypoint/integral_regression/coco/resnet_dsnt_coco.yml
+- configs/body_2d_keypoint/integral_regression/coco/resnet_ipr_coco.yml
+- configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-coco.yml
+- configs/body_2d_keypoint/rtmpose/body8/rtmpose_body8-halpe26.yml
+- configs/body_2d_keypoint/rtmpose/coco/rtmpose_coco.yml
+- configs/body_2d_keypoint/rtmpose/crowdpose/rtmpose_crowdpose.yml
+- configs/body_2d_keypoint/rtmpose/humanart/rtmpose_humanart.yml
+- configs/body_2d_keypoint/rtmpose/mpii/rtmpose_mpii.yml
+- configs/body_2d_keypoint/rtmo/coco/rtmo_coco.yml
+- configs/body_2d_keypoint/rtmo/body7/rtmo_body7.yml
+- configs/body_2d_keypoint/rtmo/crowdpose/rtmo_crowdpose.yml
+- configs/body_2d_keypoint/simcc/coco/mobilenetv2_coco.yml
+- configs/body_2d_keypoint/simcc/coco/resnet_coco.yml
+- configs/body_2d_keypoint/simcc/coco/vipnas_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/aic/hrnet_aic.yml
+- configs/body_2d_keypoint/topdown_heatmap/aic/resnet_aic.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/alexnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/cpm_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/cspnext_udp_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hourglass_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hrformer_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_augmentation_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_dark_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_udp_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/litehrnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/mobilenetv2_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/mspn_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/pvt_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/resnest_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/resnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/resnet_dark_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/resnetv1d_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/resnext_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/rsn_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/scnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/seresnet_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv1_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/shufflenetv2_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/swin_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/vgg_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/vipnas_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/coco/vitpose_coco.yml
+- configs/body_2d_keypoint/topdown_heatmap/crowdpose/cspnext_udp_crowdpose.yml
+- configs/body_2d_keypoint/topdown_heatmap/crowdpose/hrnet_crowdpose.yml
+- configs/body_2d_keypoint/topdown_heatmap/crowdpose/resnet_crowdpose.yml
+- configs/body_2d_keypoint/topdown_heatmap/exlpose/hrnet_exlpose.yml
+- configs/body_2d_keypoint/topdown_heatmap/humanart/hrnet_humanart.yml
+- configs/body_2d_keypoint/topdown_heatmap/humanart/vitpose_humanart.yml
+- configs/body_2d_keypoint/topdown_heatmap/jhmdb/cpm_jhmdb.yml
+- configs/body_2d_keypoint/topdown_heatmap/jhmdb/resnet_jhmdb.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/cpm_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/cspnext_udp_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/hourglass_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_dark_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/hrnet_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/litehrnet_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/mobilenetv2_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/resnet_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/resnetv1d_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/resnext_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/scnet_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/seresnet_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv1_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/mpii/shufflenetv2_mpii.yml
+- configs/body_2d_keypoint/topdown_heatmap/posetrack18/hrnet_posetrack18.yml
+- configs/body_2d_keypoint/topdown_heatmap/posetrack18/resnet_posetrack18.yml
+- configs/body_2d_keypoint/topdown_regression/coco/mobilenetv2_rle_coco.yml
+- configs/body_2d_keypoint/topdown_regression/coco/resnet_coco.yml
+- configs/body_2d_keypoint/topdown_regression/coco/resnet_rle_coco.yml
+- configs/body_2d_keypoint/topdown_regression/mpii/resnet_mpii.yml
+- configs/body_2d_keypoint/topdown_regression/mpii/resnet_rle_mpii.yml
+- configs/body_2d_keypoint/yoloxpose/coco/yoloxpose_coco.yml
+- configs/body_3d_keypoint/image_pose_lift/h36m/simplebaseline3d_h36m.yml
+- configs/body_3d_keypoint/motionbert/h36m/motionbert_h36m.yml
+- configs/body_3d_keypoint/video_pose_lift/h36m/videopose3d_h36m.yml
+- configs/face_2d_keypoint/rtmpose/coco_wholebody_face/rtmpose_coco_wholebody_face.yml
+- configs/face_2d_keypoint/rtmpose/face6/rtmpose_face6.yml
+- configs/face_2d_keypoint/rtmpose/lapa/rtmpose_lapa.yml
+- configs/face_2d_keypoint/rtmpose/wflw/rtmpose_wflw.yml
+- configs/face_2d_keypoint/topdown_heatmap/300w/hrnetv2_300w.yml
+- configs/face_2d_keypoint/topdown_heatmap/300wlp/hrnetv2_300wlp.yml
+- configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_aflw.yml
+- configs/face_2d_keypoint/topdown_heatmap/aflw/hrnetv2_dark_aflw.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hourglass_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/hrnetv2_dark_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/mobilenetv2_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/resnet_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/coco_wholebody_face/scnet_coco_wholebody_face.yml
+- configs/face_2d_keypoint/topdown_heatmap/cofw/hrnetv2_cofw.yml
+- configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_awing_wflw.yml
+- configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_dark_wflw.yml
+- configs/face_2d_keypoint/topdown_heatmap/wflw/hrnetv2_wflw.yml
+- configs/face_2d_keypoint/topdown_regression/wflw/resnet_softwingloss_wflw.yml
+- configs/face_2d_keypoint/topdown_regression/wflw/resnet_wflw.yml
+- configs/face_2d_keypoint/topdown_regression/wflw/resnet_wingloss_wflw.yml
+- configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/hrnet_deepfashion.yml
+- configs/fashion_2d_keypoint/topdown_heatmap/deepfashion/resnet_deepfashion.yml
+- configs/fashion_2d_keypoint/topdown_heatmap/deepfashion2/res50_deepfasion2.yml
+- configs/hand_2d_keypoint/rtmpose/coco_wholebody_hand/rtmpose_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/rtmpose/hand5/rtmpose_hand5.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hourglass_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/hrnetv2_dark_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/litehrnet_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/mobilenetv2_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/resnet_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/coco_wholebody_hand/scnet_coco_wholebody_hand.yml
+- configs/hand_2d_keypoint/topdown_heatmap/freihand2d/resnet_freihand2d.yml
+- configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_dark_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_heatmap/onehand10k/hrnetv2_udp_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_heatmap/onehand10k/mobilenetv2_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_heatmap/onehand10k/resnet_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_dark_rhd2d.yml
+- configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_rhd2d.yml
+- configs/hand_2d_keypoint/topdown_heatmap/rhd2d/hrnetv2_udp_rhd2d.yml
+- configs/hand_2d_keypoint/topdown_heatmap/rhd2d/mobilenetv2_rhd2d.yml
+- configs/hand_2d_keypoint/topdown_heatmap/rhd2d/resnet_rhd2d.yml
+- configs/hand_2d_keypoint/topdown_regression/onehand10k/resnet_onehand10k.yml
+- configs/hand_2d_keypoint/topdown_regression/rhd2d/resnet_rhd2d.yml
+- configs/hand_3d_keypoint/internet/interhand3d/internet_interhand3d.yml
+- configs/wholebody_2d_keypoint/rtmpose/coco-wholebody/rtmpose_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/cspnext_udp_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/hrnet_dark_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/resnet_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/coco-wholebody/vipnas_dark_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/topdown_heatmap/ubody2d/hrnet_coco-wholebody.yml
+- configs/wholebody_2d_keypoint/rtmpose/cocktail14/rtmw_cocktail14.yml
diff --git a/projects/README.md b/projects/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a23696640e6a5118dbba1fa07bdb21a78817adce
--- /dev/null
+++ b/projects/README.md
@@ -0,0 +1,87 @@
+# Welcome to Projects of MMPose
+
+Hey there! This is the place for you to contribute your awesome keypoint detection techniques to MMPose!
+
+We know the unit tests in core package can be a bit intimidating, so we've made it easier and more efficient for you to implement your algorithms here.
+
+And the **best part**?
+
+- Projects in this folder are designed to be **easier to merge**!
+
+- Projects in this folder are **NOT** strictly required for **writing unit tests**!
+
+- We want to make it **as painless as possible** for you to contribute and make MMPose even greater.
+
+If you're not sure where to start, check out our [example project](./example_project) to see how to add your algorithms easily. And if you have any questions, take a look at our [FAQ](./faq.md).
+
+We also provide some documentation listed below to help you get started:
+
+- [New Model Guide](https://mmpose.readthedocs.io/en/latest/guide_to_framework.html#step3-model)
+
+ A guide to help you add new models to MMPose.
+
+- [Contribution Guide](https://mmpose.readthedocs.io/en/latest/contribution_guide.html)
+
+ A guide for new contributors on how to add their projects to MMPose.
+
+- [Discussions](https://github.com/open-mmlab/mmpose/discussions)
+
+ We encourage you to start a discussion and share your ideas!
+
+## Project List
+
+- **[:zap:RTMPose](./rtmpose)**: Real-Time Multi-Person Pose Estimation toolkit based on MMPose
+
+ TRY IT NOW
+
+
+
+ Supported backbones:
+ +- [x] [AlexNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#alexnet-neurips-2012) (NeurIPS'2012) +- [x] [VGG](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#vgg-iclr-2015) (ICLR'2015) +- [x] [ResNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#resnet-cvpr-2016) (CVPR'2016) +- [x] [ResNext](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#resnext-cvpr-2017) (CVPR'2017) +- [x] [SEResNet](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#seresnet-cvpr-2018) (CVPR'2018) +- [x] [ShufflenetV1](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#shufflenetv1-cvpr-2018) (CVPR'2018) +- [x] [ShufflenetV2](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#shufflenetv2-eccv-2018) (ECCV'2018) +- [x] [MobilenetV2](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#mobilenetv2-cvpr-2018) (CVPR'2018) +- [x] [ResNetV1D](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#resnetv1d-cvpr-2019) (CVPR'2019) +- [x] [ResNeSt](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#resnest-arxiv-2020) (ArXiv'2020) +- [x] [Swin](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#swin-cvpr-2021) (CVPR'2021) +- [x] [HRFormer](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#hrformer-nips-2021) (NIPS'2021) +- [x] [PVT](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#pvt-iccv-2021) (ICCV'2021) +- [x] [PVTV2](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/backbones.html#pvtv2-cvmj-2022) (CVMJ'2022) + +
+  +
+
+ +- **[🎳RTMO](./rtmo)**: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation + + TRY IT NOW + + + +
+  +
+
+ +- **[♾️PoseAnything](./pose_anything/)**: A Graph-Based Approach for Category-Agnostic Pose Estimation + +
+  +
+
+ +- **[:art:MMPose4AIGC](./mmpose4aigc)**: Guide AI image generation with MMPose + +
+  +
+
+ + +- **[:bulb:YOLOX-Pose](./yolox_pose)**: Enhancing YOLO for Multi Person Pose Estimation Using Object Keypoint Similarity Loss + +
+  +
+
+ + +- **[📖Awesome MMPose](./awesome-mmpose/)**: A list of Tutorials, Papers, Datasets related to MMPose + +
+  +
+
+ + +- **[💃Just-Dance](./just_dance)**: Enhancing Dance scoring system for comparing dance performances in videos. + + TRY IT NOW + + + +
+  +
+
+ +- **What's next? Join the rank of *MMPose contributors* by creating a new project**! diff --git a/projects/awesome-mmpose/README.md b/projects/awesome-mmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..99a6472269d2d3c17f8f20220d345ca0cd8a40a7 --- /dev/null +++ b/projects/awesome-mmpose/README.md @@ -0,0 +1,80 @@ +# Awesome MMPose + +A list of resources related to MMPose. Feel free to contribute! + +
+
+
++ +## Contents + +- [Tutorials](#tutorials) +- [Papers](#papers) +- [Datasets](#datasets) +- [Projects](#projects) + +## Tutorials + +- [MMPose Tutorial (Chinese)](https://github.com/TommyZihao/MMPose_Tutorials) + + MMPose 中文视频代码教程,from 同济子豪兄 + +
+  +
+
+ + +- [OpenMMLab Course](https://github.com/open-mmlab/OpenMMLabCourse) + + This repository hosts articles, lectures and tutorials on computer vision and OpenMMLab, helping learners to understand algorithms and master our toolboxes in a systematical way. + +## Papers + +- [\[paper\]](https://arxiv.org/abs/2207.10387) [\[code\]](https://github.com/luminxu/Pose-for-Everything) + + ECCV 2022, Pose for Everything: Towards Category-Agnostic Pose Estimation + +- [\[paper\]](https://arxiv.org/abs/2201.04676) [\[code\]](https://github.com/Sense-X/UniFormer) + + ICLR 2022, UniFormer: Unified Transformer for Efficient Spatiotemporal Representation Learning + +- [\[paper\]](https://arxiv.org/abs/2201.07412) [\[code\]](https://github.com/aim-uofa/Poseur) + + ECCV 2022, Poseur:Direct Human Pose Regression with Transformers + +- [\[paper\]](https://arxiv.org/abs/2106.03348) [\[code\]](https://github.com/ViTAE-Transformer/ViTAE-Transformer) + + NeurIPS 2022, ViTAEv2: Vision Transformer Advanced by Exploring Inductive Bias for Image Recognition and Beyond + +- [\[paper\]](https://arxiv.org/abs/2204.10762) [\[code\]](https://github.com/ZiyiZhang27/Dite-HRNet) + + IJCAI-ECAI 2021, Dite-HRNet:Dynamic Lightweight High-Resolution Network for Human Pose Estimation + +- [\[paper\]](https://arxiv.org/abs/2302.08453) [\[code\]](https://github.com/TencentARC/T2I-Adapter) + + T2I-Adapter: Learning Adapters to Dig out More Controllable Ability for Text-to-Image Diffusion Models + +- [\[paper\]](https://arxiv.org/pdf/2303.11638.pdf) [\[code\]](https://github.com/Gengzigang/PCT) + + CVPR 2023, Human Pose as Compositional Tokens + +## Datasets + +- [\[github\]](https://github.com/luminxu/Pose-for-Everything) **MP-100** + + Multi-category Pose (MP-100) dataset, which is a 2D pose dataset of 100 object categories containing over 20K instances and is well-designed for developing CAPE algorithms. + +
+  +
+
+ + +- [\[github\]](https://github.com/facebookresearch/Ego4d/) **Ego4D** + + EGO4D is the world's largest egocentric (first person) video ML dataset and benchmark suite, with 3,600 hrs (and counting) of densely narrated video and a wide range of annotations across five new benchmark tasks. It covers hundreds of scenarios (household, outdoor, workplace, leisure, etc.) of daily life activity captured in-the-wild by 926 unique camera wearers from 74 worldwide locations and 9 different countries. + +
+  +
+
+ + +## Projects + +Waiting for your contribution! diff --git a/projects/example_project/README.md b/projects/example_project/README.md new file mode 100644 index 0000000000000000000000000000000000000000..d355741aa455c4a07a3ca635c1104a23a0c73c39 --- /dev/null +++ b/projects/example_project/README.md @@ -0,0 +1,166 @@ +# Example Project + +> A README.md template for releasing a project. +> +> All the fields in this README are **mandatory** for others to understand what you have achieved in this implementation. +> Please read our [Projects FAQ](../faq.md) if you still feel unclear about the requirements, or raise an [issue](https://github.com/open-mmlab/mmpose/issues) to us! + +## Description + +> Share any information you would like others to know. For example: +> +> Author: @xxx. +> +> This is an implementation of \[XXX\]. + +Author: @xxx. + +This project implements a top-down pose estimator with custom head and loss functions that have been seamlessly inherited from existing modules within MMPose. + +## Usage + +> For a typical model, this section should contain the commands for training and testing. +> You are also suggested to dump your environment specification to env.yml by `conda env export > env.yml`. + +### Prerequisites + +- Python 3.7 +- PyTorch 1.6 or higher +- [MIM](https://github.com/open-mmlab/mim) v0.33 or higher +- [MMPose](https://github.com/open-mmlab/mmpose) v1.0.0rc0 or higher + +All the commands below rely on the correct configuration of `PYTHONPATH`, which should point to the project's directory so that Python can locate the module files. In `example_project/` root directory, run the following line to add the current directory to `PYTHONPATH`: + +```shell +export PYTHONPATH=`pwd`:$PYTHONPATH +``` + +### Data Preparation + +Prepare the COCO dataset according to the [instruction](https://mmpose.readthedocs.io/en/dev-1.x/dataset_zoo/2d_body_keypoint.html#coco). + +### Training commands + +**To train with single GPU:** + +```shell +mim train mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py +``` + +**To train with multiple GPUs:** + +```shell +mim train mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py --launcher pytorch --gpus 8 +``` + +**To train with multiple GPUs by slurm:** + +```shell +mim train mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py --launcher slurm \ + --gpus 16 --gpus-per-node 8 --partition $PARTITION +``` + +### Testing commands + +**To test with single GPU:** + +```shell +mim test mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py $CHECKPOINT +``` + +**To test with multiple GPUs:** + +```shell +mim test mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py $CHECKPOINT --launcher pytorch --gpus 8 +``` + +**To test with multiple GPUs by slurm:** + +```shell +mim test mmpose configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py $CHECKPOINT --launcher slurm \ + --gpus 16 --gpus-per-node 8 --partition $PARTITION +``` + +## Results + +> List the results as usually done in other model's README. Here is an [Example](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.md). + +> You should claim whether this is based on the pre-trained weights, which are converted from the official release; or it's a reproduced result obtained from retraining the model in this project + +| Model | Backbone | Input Size | AP | AP50 | AP75 | AR | AR50 | Download | +| :-----------------------------------------------------------: | :-------: | :--------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :---------------------------------------------------------------: | +| [ExampleHead + ExampleLoss](./configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py) | HRNet-w32 | 256x912 | 0.749 | 0.906 | 0.821 | 0.804 | 0.945 | [model](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192-81c58e40_20220909.pth) \| [log](https://download.openmmlab.com/mmpose/v1/body_2d_keypoint/topdown_heatmap/coco/td-hm_hrnet-w32_8xb64-210e_coco-256x192_20220909.log) | + +## Citation + +> You may remove this section if not applicable. + +```bibtex +@misc{mmpose2020, + title={OpenMMLab Pose Estimation Toolbox and Benchmark}, + author={MMPose Contributors}, + howpublished = {\url{https://github.com/open-mmlab/mmpose}}, + year={2020} +} +``` + +## Checklist + +Here is a checklist of this project's progress. And you can ignore this part if you don't plan to contribute +to MMPose projects. + +> The PIC (person in charge) or contributors of this project should check all the items that they believe have been finished, which will further be verified by codebase maintainers via a PR. + +> OpenMMLab's maintainer will review the code to ensure the project's quality. Reaching the first milestone means that this project suffices the minimum requirement of being merged into 'projects/'. But this project is only eligible to become a part of the core package upon attaining the last milestone. + +> Note that keeping this section up-to-date is crucial not only for this project's developers but the entire community, since there might be some other contributors joining this project and deciding their starting point from this list. It also helps maintainers accurately estimate time and effort on further code polishing, if needed. + +> A project does not necessarily have to be finished in a single PR, but it's essential for the project to at least reach the first milestone in its very first PR. + +- [ ] Milestone 1: PR-ready, and acceptable to be one of the `projects/`. + + - [ ] Finish the code + + > The code's design shall follow existing interfaces and convention. For example, each model component should be registered into `mmpose.registry.MODELS` and configurable via a config file. + + - [ ] Basic docstrings & proper citation + + > Each major class should contains a docstring, describing its functionality and arguments. If your code is copied or modified from other open-source projects, don't forget to cite the source project in docstring and make sure your behavior is not against its license. Typically, we do not accept any code snippet under GPL license. [A Short Guide to Open Source Licenses](https://medium.com/nationwide-technology/a-short-guide-to-open-source-licenses-cf5b1c329edd) + + - [ ] Test-time correctness + + > If you are reproducing the result from a paper, make sure your model's inference-time performance matches that in the original paper. The weights usually could be obtained by simply renaming the keys in the official pre-trained weights. This test could be skipped though, if you are able to prove the training-time correctness and check the second milestone. + + - [ ] A full README + + > As this template does. + +- [ ] Milestone 2: Indicates a successful model implementation. + + - [ ] Training-time correctness + + > If you are reproducing the result from a paper, checking this item means that you should have trained your model from scratch based on the original paper's specification and verified that the final result matches the report within a minor error range. + +- [ ] Milestone 3: Good to be a part of our core package! + + - [ ] Type hints and docstrings + + > Ideally *all* the methods should have [type hints](https://www.pythontutorial.net/python-basics/python-type-hints/) and [docstrings](https://google.github.io/styleguide/pyguide.html#381-docstrings). [Example](https://github.com/open-mmlab/mmpose/blob/0fb7f22000197181dc0629f767dd99d881d23d76/mmpose/utils/tensor_utils.py#L53) + + - [ ] Unit tests + + > Unit tests for the major module are required. [Example](https://github.com/open-mmlab/mmpose/blob/dev-1.x/tests/test_models/test_heads/test_heatmap_heads/test_heatmap_head.py) + + - [ ] Code polishing + + > Refactor your code according to reviewer's comment. + + - [ ] Metafile.yml + + > It will be parsed by MIM and Inferencer. [Example](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/coco/hrnet_coco.yml) + + - [ ] Move your modules into the core package following the codebase's file hierarchy structure. + + > In particular, you may have to refactor this README into a standard one. [Example](https://github.com/open-mmlab/mmpose/blob/dev-1.x/configs/body_2d_keypoint/topdown_heatmap/README.md) + + - [ ] Refactor your modules into the core package following the codebase's file hierarchy structure. diff --git a/projects/example_project/configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py b/projects/example_project/configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py new file mode 100644 index 0000000000000000000000000000000000000000..99b19d478c428aaaf12d7afeb6a8ac1c5604e884 --- /dev/null +++ b/projects/example_project/configs/example-head-loss_hrnet-w32_8xb64-210e_coco-256x192.py @@ -0,0 +1,15 @@ +# Directly inherit the entire recipe you want to use. +_base_ = 'mmpose::body_2d_keypoint/topdown_heatmap/coco/' \ + 'td-hm_hrnet-w32_8xb64-210e_coco-256x192.py' + +# This line is to import your own modules. +custom_imports = dict(imports='models') + +# Modify the model to use your own head and loss. +_base_['model']['head'] = dict( + type='ExampleHead', + in_channels=32, + out_channels=17, + deconv_out_channels=None, + loss=dict(type='ExampleLoss', use_target_weight=True), + decoder=_base_['codec']) diff --git a/projects/example_project/models/__init__.py b/projects/example_project/models/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..61dc5dac0e1b52ce159a40c9b5c92d8bf0dd546d --- /dev/null +++ b/projects/example_project/models/__init__.py @@ -0,0 +1,4 @@ +from .example_head import ExampleHead +from .example_loss import ExampleLoss + +__all__ = ['ExampleHead', 'ExampleLoss'] diff --git a/projects/example_project/models/example_head.py b/projects/example_project/models/example_head.py new file mode 100644 index 0000000000000000000000000000000000000000..c5da95d481a212281f4b1c0dd28ccaa64695c33e --- /dev/null +++ b/projects/example_project/models/example_head.py @@ -0,0 +1,77 @@ +from mmpose.models import HeatmapHead +from mmpose.registry import MODELS + + +# Register your head to the `MODELS`. +@MODELS.register_module() +class ExampleHead(HeatmapHead): + """Implements an example head. + + Implement the model head just like a normal pytorch module. + """ + + def __init__(self, **kwargs) -> None: + print('Initializing ExampleHead...') + super().__init__(**kwargs) + + def forward(self, feats): + """Forward the network. The input is multi scale feature maps and the + output is the coordinates. + + Args: + feats (Tuple[Tensor]): Multi scale feature maps. + + Returns: + Tensor: output coordinates or heatmaps. + """ + return super().forward(feats) + + def predict(self, feats, batch_data_samples, test_cfg={}): + """Predict results from outputs. The behaviour of head during testing + should be defined in this function. + + Args: + feats (Tuple[Tensor] | List[Tuple[Tensor]]): The multi-stage + features (or multiple multi-stage features in TTA) + batch_data_samples (List[:obj:`PoseDataSample`]): A list of + data samples for instances in a batch + test_cfg (dict): The runtime config for testing process. Defaults + to {} + + Returns: + Union[InstanceList | Tuple[InstanceList | PixelDataList]]: If + ``test_cfg['output_heatmap']==True``, return both pose and heatmap + prediction; otherwise only return the pose prediction. + + The pose prediction is a list of ``InstanceData``, each contains + the following fields: + + - keypoints (np.ndarray): predicted keypoint coordinates in + shape (num_instances, K, D) where K is the keypoint number + and D is the keypoint dimension + - keypoint_scores (np.ndarray): predicted keypoint scores in + shape (num_instances, K) + + The heatmap prediction is a list of ``PixelData``, each contains + the following fields: + + - heatmaps (Tensor): The predicted heatmaps in shape (K, h, w) + """ + return super().predict(feats, batch_data_samples, test_cfg) + + def loss(self, feats, batch_data_samples, train_cfg={}) -> dict: + """Calculate losses from a batch of inputs and data samples. The + behaviour of head during training should be defined in this function. + + Args: + feats (Tuple[Tensor]): The multi-stage features + batch_data_samples (List[:obj:`PoseDataSample`]): A list of + data samples for instances in a batch + train_cfg (dict): The runtime config for training process. + Defaults to {} + + Returns: + dict: A dictionary of losses. + """ + + return super().loss(feats, batch_data_samples, train_cfg) diff --git a/projects/example_project/models/example_loss.py b/projects/example_project/models/example_loss.py new file mode 100644 index 0000000000000000000000000000000000000000..e55d03537efb90ed21f85ba73e9c93c5b2d58e99 --- /dev/null +++ b/projects/example_project/models/example_loss.py @@ -0,0 +1,40 @@ +from mmpose.models import KeypointMSELoss +from mmpose.registry import MODELS + + +# Register your loss to the `MODELS`. +@MODELS.register_module() +class ExampleLoss(KeypointMSELoss): + """Implements an example loss. + + Implement the loss just like a normal pytorch module. + """ + + def __init__(self, **kwargs) -> None: + print('Initializing ExampleLoss...') + super().__init__(**kwargs) + + def forward(self, output, target, target_weights=None, mask=None): + """Forward function of loss. The input arguments should match those + given in `head.loss` function. + + Note: + - batch_size: B + - num_keypoints: K + - heatmaps height: H + - heatmaps weight: W + + Args: + output (Tensor): The output heatmaps with shape [B, K, H, W] + target (Tensor): The target heatmaps with shape [B, K, H, W] + target_weights (Tensor, optional): The target weights of differet + keypoints, with shape [B, K] (keypoint-wise) or + [B, K, H, W] (pixel-wise). + mask (Tensor, optional): The masks of valid heatmap pixels in + shape [B, K, H, W] or [B, 1, H, W]. If ``None``, no mask will + be applied. Defaults to ``None`` + + Returns: + Tensor: The calculated loss. + """ + return super().forward(output, target, target_weights, mask) diff --git a/projects/faq.md b/projects/faq.md new file mode 100644 index 0000000000000000000000000000000000000000..3f62e14ec5f54764f30e528e51673ff4a48d2f29 --- /dev/null +++ b/projects/faq.md @@ -0,0 +1,23 @@ +# FAQ + +To help users better understand the `projects/` folder and how to use it effectively, we've created this FAQ page. Here, users can find answers to common questions and learn more about various aspects of the `projects/` folder, such as its usage and contribution guidance. + +## Q1: Why set up `projects/` folder? + +Implementing new models and features into OpenMMLab's algorithm libraries could be troublesome due to the rigorous requirements on code quality, which could hinder the fast iteration of SOTA models and might discourage our members from sharing their latest outcomes here. And that's why we have this `projects/` folder now, where some experimental features, frameworks and models are placed, only needed to satisfy the minimum requirement on the code quality, and can be used as standalone libraries. Users are welcome to use them if they [use MMPose from source](https://mmpose.readthedocs.io/en/dev-1.x/installation.html#best-practices). + +## Q2: Why should there be a checklist for a project? + +This checkelist is crucial not only for this project's developers but the entire community, since there might be some other contributors joining this project and deciding their starting point from this list. It also helps maintainers accurately estimate time and effort on further code polishing, if needed. + +## Q3: What kind of PR will be merged? + +Reaching the first milestone means that this project suffices the minimum requirement of being merged into 'projects/'. That is, the very first PR of a project must have all the terms in the first milestone checked. We do not have any extra requirements on the project's following PRs, so they can be a minor bug fix or update, and do not have to achieve one milestone at once. But keep in mind that this project is only eligible to become a part of the core package upon attaining the last milestone. + +## Q4: Compared to other models in the core packages, why do the model implementations in projects have different training/testing commands? + +Projects are organized independently from the core package, and therefore their modules cannot be directly imported by `train.py` and `test.py`. Each model implementation in projects should either use `mim` for training/testing as suggested in the example project or provide a custom `train.py`/`test.py`. + +## Q5: How to debug a project with a debugger? + +Debugger makes our lives easier, but using it becomes a bit tricky if we have to train/test a model via `mim`. The way to circumvent that is that we can take advantage of relative path to import these modules. Assuming that we are developing a project X and the core modules are placed under `projects/X/modules`, then simply adding `custom_imports = dict(imports='projects.X.modules')` to the config allows us to debug from usual entrypoints (e.g. `tools/train.py`) from the root directory of the algorithm library. Just don't forget to remove 'projects.X' before project publishment. diff --git a/projects/just_dance/README.md b/projects/just_dance/README.md new file mode 100644 index 0000000000000000000000000000000000000000..385ef03005a303340ff45cf6110f11cd0d9203e7 --- /dev/null +++ b/projects/just_dance/README.md @@ -0,0 +1,42 @@ +# Just Dance - A Simple Implementation + + + + Try it on OpenXLab + + + +This project presents a dance scoring system based on RTMPose. Users can compare the similarity between two dancers in different videos: one referred to as the "teacher video" and the other as the "student video." + +Here are examples of the output dance comparison: + +
+
+
+
+English | [简体中文](./README_CN.md)
+
+This project will demonstrate how to use MMPose to generate skeleton images for pose guided AI image generation.
+
+Currently, we support:
+
+- [T2I Adapter](https://huggingface.co/spaces/Adapter/T2I-Adapter)
+
+Please feel free to share interesting pose-guided AIGC projects to us!
+
+## Get Started
+
+### Generate OpenPose-style Skeleton
+
+#### Step 1: Preparation
+
+Run the following commands to prepare the project:
+
+```shell
+# install mmpose mmdet
+pip install openmim
+git clone https://github.com/open-mmlab/mmpose.git
+cd mmpose
+mim install -e .
+mim install "mmdet>=3.0.0rc6"
+
+# download models
+bash download_models.sh
+```
+
+#### Step 2: Generate a Skeleton Image
+
+Run the following command to generate a skeleton image:
+
+```shell
+# generate a skeleton image
+bash mmpose_openpose.sh ../../tests/data/coco/000000000785.jpg
+```
+
+The input image and its skeleton are as follows:
+
+
+
+
 +
+
+
+### Generate MMPose-style Skeleton
+
+#### Step 1: Preparation
+
+**Env Requirements:**
+
+- GCC >= 7.5
+- cmake >= 3.14
+
+Run the following commands to install the project:
+
+```shell
+bash install_posetracker_linux.sh
+```
+
+After installation, files are organized as follows:
+
+```shell
+|----mmdeploy-1.0.0-linux-x86_64-cxx11abi
+| |----README.md
+| |----rtmpose-ort
+| | |----rtmdet-nano
+| | |----rtmpose-m
+| | |----000000147979.jpg
+| | |----t2i-adapter_skeleton.txt
+```
+
+#### Step 2: Generate a Skeleton Image
+
+Run the following command to generate a skeleton image:
+
+```shell
+# generate a skeleton image
+bash mmpose_style_skeleton.sh \
+ mmdeploy-1.0.0-linux-x86_64-cxx11abi/rtmpose-ort/000000147979.jpg
+```
+
+For more details, you can refer to [RTMPose](../rtmpose/README.md).
+
+The input image and its skeleton are as follows:
+
+
+
+
 +
+
+
+### Upload to T2I-Adapter
+
+The demo page of T2I- Adapter is [Here](https://huggingface.co/spaces/Adapter/T2I-Adapter).
+
+[](https://huggingface.co/spaces/ChongMou/T2I-Adapter)
+
+
+
+ +
+
+
+## Gallery
+
+
+
+ +
+
diff --git a/projects/mmpose4aigc/README_CN.md b/projects/mmpose4aigc/README_CN.md
new file mode 100644
index 0000000000000000000000000000000000000000..44bbe2d4597a15270abfa8b983caa6f8d859c98c
--- /dev/null
+++ b/projects/mmpose4aigc/README_CN.md
@@ -0,0 +1,110 @@
+# MMPose for AIGC (AI Generated Content)
+
+
+
+
+
+
+简体中文 | [English](./README.md)
+
+本项目将支持使用 MMPose 来生成骨架图片,用于姿态引导的 AI 图像生成。
+
+当前已支持:
+
+- [T2I Adapter](https://huggingface.co/spaces/Adapter/T2I-Adapter)
+
+欢迎分享更多姿态引导的 AIGC 项目给我们!
+
+## 快速上手
+
+### 生成 Openpose 风格的骨架图片
+
+#### Step 1: 准备
+
+运行以下命令准备项目:
+
+```shell
+# install mmpose mmdet
+pip install openmim
+git clone https://github.com/open-mmlab/mmpose.git
+cd mmpose
+mim install -e .
+mim install "mmdet>=3.0.0rc6"
+
+# download models
+bash download_models.sh
+```
+
+#### Step 2: 生成骨架图片
+
+运行以下命令生成骨架图片:
+
+```shell
+bash mmpose_openpose.sh ../../tests/data/coco/000000000785.jpg
+```
+
+输入图片与生成骨架图片如下:
+
+
+
+
+
+
+### 生成 MMPose 风格的骨架图片
+
+#### Step 1: 准备
+
+**环境要求:**
+
+- GCC >= 7.5
+- cmake >= 3.14
+
+运行以下命令安装项目:
+
+```shell
+bash install_posetracker_linux.sh
+```
+
+最终的文件结构如下:
+
+```shell
+|----mmdeploy-1.0.0-linux-x86_64-cxx11abi
+| |----README.md
+| |----rtmpose-ort
+| | |----rtmdet-nano
+| | |----rtmpose-m
+| | |----000000147979.jpg
+| | |----t2i-adapter_skeleton.txt
+```
+
+#### Step 2: 生成姿态骨架图片
+
+运行以下命令生成姿态骨架图片:
+
+```shell
+# 生成骨架图片
+bash mmpose_style_skeleton.sh \
+ mmdeploy-1.0.0-linux-x86_64-cxx11abi/rtmpose-ort/000000147979.jpg
+```
+
+更多详细信息可以查看 [RTMPose](../rtmpose/README_CN.md)。
+
+输入图片与生成骨架图片如下:
+
+
+
+
+
+
+### 使用 T2I-Adapter
+
+T2I- Adapter 在线试玩请点击 [这里](https://huggingface.co/spaces/Adapter/T2I-Adapter)
+
+[](https://huggingface.co/spaces/ChongMou/T2I-Adapter)
+
+
+
+
+
+
+## 结果展示
+
+
+
+
+
diff --git a/projects/mmpose4aigc/download_models.sh b/projects/mmpose4aigc/download_models.sh
new file mode 100644
index 0000000000000000000000000000000000000000..c26a3c833f0041d0af3e6b5095511db6a2e6c830
--- /dev/null
+++ b/projects/mmpose4aigc/download_models.sh
@@ -0,0 +1,20 @@
+#!/bin/bash
+# Copyright (c) OpenMMLab. All rights reserved.
+
+# Create models folder
+mkdir models
+
+# Go to models folder
+cd models
+
+# Download det model
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth
+
+# Download pose model
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth
+
+# Go back mmpose4aigc
+cd ..
+
+# Success
+echo "Download completed."
diff --git a/projects/mmpose4aigc/install_posetracker_linux.sh b/projects/mmpose4aigc/install_posetracker_linux.sh
new file mode 100644
index 0000000000000000000000000000000000000000..09c91ce9d1b047c34900608e08806be5bb05d7e7
--- /dev/null
+++ b/projects/mmpose4aigc/install_posetracker_linux.sh
@@ -0,0 +1,30 @@
+#!/bin/bash
+# Copyright (c) OpenMMLab. All rights reserved.
+
+# Download pre-compiled files
+wget https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# Unzip files
+tar -xzvf mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# Go to the sdk folder
+cd mmdeploy-1.0.0-linux-x86_64-cxx11abi
+
+# Init environment
+source set_env.sh
+
+# If opencv 3+ is not installed on your system, execute the following command.
+# If it is installed, skip this command
+bash install_opencv.sh
+
+# Compile executable programs
+bash build_sdk.sh
+
+# Download models
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmpose-cpu.zip
+
+# Unzip files
+unzip rtmpose-cpu.zip
+
+# Success
+echo "Installation completed."
diff --git a/projects/mmpose4aigc/mmpose_openpose.sh b/projects/mmpose4aigc/mmpose_openpose.sh
new file mode 100644
index 0000000000000000000000000000000000000000..1b011a6192508eb642433f7557d99728655c74a3
--- /dev/null
+++ b/projects/mmpose4aigc/mmpose_openpose.sh
@@ -0,0 +1,12 @@
+#!/bin/bash
+# Copyright (c) OpenMMLab. All rights reserved.
+
+INPUT_IMAGE=$1
+
+python openpose_visualization.py \
+ ../rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ models/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ ../rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ models/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input $INPUT_IMAGE \
+ --device cuda:0 \
diff --git a/projects/mmpose4aigc/mmpose_style_skeleton.sh b/projects/mmpose4aigc/mmpose_style_skeleton.sh
new file mode 100644
index 0000000000000000000000000000000000000000..afb03ecfc7a1baa4f1d8a31c8ef29fc59b58bc3e
--- /dev/null
+++ b/projects/mmpose4aigc/mmpose_style_skeleton.sh
@@ -0,0 +1,17 @@
+#!/bin/bash
+# Copyright (c) OpenMMLab. All rights reserved.
+
+WORKSPACE=mmdeploy-1.0.0-linux-x86_64-cxx11abi
+export LD_LIBRARY_PATH=${WORKSPACE}/lib:${WORKSPACE}/thirdparty/onnxruntime/lib:$LD_LIBRARY_PATH
+
+INPUT_IMAGE=$1
+
+${WORKSPACE}/bin/pose_tracker \
+ ${WORKSPACE}/rtmpose-ort/rtmdet-nano \
+ ${WORKSPACE}/rtmpose-ort/rtmpose-m \
+ $INPUT_IMAGE \
+ --background black \
+ --skeleton ${WORKSPACE}/rtmpose-ort/t2i-adapter_skeleton.txt \
+ --output ./skeleton_res.jpg \
+ --pose_kpt_thr 0.4 \
+ --show -1
diff --git a/projects/mmpose4aigc/openpose_visualization.py b/projects/mmpose4aigc/openpose_visualization.py
new file mode 100644
index 0000000000000000000000000000000000000000..b634d07757e6aa9c0fd57e72aac53261c7ad5bb4
--- /dev/null
+++ b/projects/mmpose4aigc/openpose_visualization.py
@@ -0,0 +1,174 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import math
+import mimetypes
+import os
+from argparse import ArgumentParser
+from itertools import product
+
+import cv2
+import mmcv
+import numpy as np
+from mmengine.registry import init_default_scope
+
+from mmpose.apis import inference_topdown
+from mmpose.apis import init_model as init_pose_estimator
+from mmpose.evaluation.functional import nms
+from mmpose.structures import merge_data_samples
+
+try:
+ from mmdet.apis import inference_detector, init_detector
+ has_mmdet = True
+except (ImportError, ModuleNotFoundError):
+ has_mmdet = False
+
+# openpose format
+limb_seq = [[2, 3], [2, 6], [3, 4], [4, 5], [6, 7], [7, 8], [2, 9], [9, 10],
+ [10, 11], [2, 12], [12, 13], [13, 14], [2, 1], [1, 15], [15, 17],
+ [1, 16], [16, 18]]
+
+colors = [[255, 0, 0], [255, 85, 0], [255, 170, 0], [255, 255,
+ 0], [170, 255, 0],
+ [85, 255, 0], [0, 255, 0],
+ [0, 255, 85], [0, 255, 170], [0, 255, 255], [0, 170, 255],
+ [0, 85, 255], [0, 0, 255], [85, 0, 255], [170, 0,
+ 255], [255, 0, 255],
+ [255, 0, 170], [255, 0, 85]]
+
+stickwidth = 4
+num_openpose_kpt = 18
+num_link = len(limb_seq)
+
+
+def mmpose_to_openpose_visualization(args, img_path, detector, pose_estimator):
+ """Visualize predicted keypoints of one image in openpose format."""
+
+ # predict bbox
+ scope = detector.cfg.get('default_scope', 'mmdet')
+ if scope is not None:
+ init_default_scope(scope)
+ det_result = inference_detector(detector, img_path)
+ pred_instance = det_result.pred_instances.cpu().numpy()
+ bboxes = np.concatenate(
+ (pred_instance.bboxes, pred_instance.scores[:, None]), axis=1)
+ bboxes = bboxes[np.logical_and(pred_instance.labels == args.det_cat_id,
+ pred_instance.scores > args.bbox_thr)]
+ bboxes = bboxes[nms(bboxes, args.nms_thr), :4]
+
+ # predict keypoints
+ pose_results = inference_topdown(pose_estimator, img_path, bboxes)
+ data_samples = merge_data_samples(pose_results)
+
+ # concatenate scores and keypoints
+ keypoints = np.concatenate(
+ (data_samples.pred_instances.keypoints,
+ data_samples.pred_instances.keypoint_scores.reshape(-1, 17, 1)),
+ axis=-1)
+
+ # compute neck joint
+ neck = (keypoints[:, 5] + keypoints[:, 6]) / 2
+ if keypoints[:, 5, 2] < args.kpt_thr or keypoints[:, 6, 2] < args.kpt_thr:
+ neck[:, 2] = 0
+
+ # 17 keypoints to 18 keypoints
+ new_keypoints = np.insert(keypoints[:, ], 17, neck, axis=1)
+
+ # mmpose format to openpose format
+ openpose_idx = [15, 14, 17, 16, 2, 6, 3, 7, 4, 8, 12, 9, 13, 10, 1]
+ mmpose_idx = [1, 2, 3, 4, 6, 7, 8, 9, 10, 12, 13, 14, 15, 16, 17]
+ new_keypoints[:, openpose_idx, :] = new_keypoints[:, mmpose_idx, :]
+
+ # show the results
+ img = mmcv.imread(img_path, channel_order='rgb')
+
+ # black background
+ black_img = np.zeros_like(img)
+
+ num_instance = new_keypoints.shape[0]
+
+ # draw keypoints
+ for i, j in product(range(num_instance), range(num_openpose_kpt)):
+ x, y, conf = new_keypoints[i][j]
+ if conf > args.kpt_thr:
+ cv2.circle(black_img, (int(x), int(y)), 4, colors[j], thickness=-1)
+
+ # draw links
+ cur_black_img = black_img.copy()
+ for i, link_idx in product(range(num_instance), range(num_link)):
+ conf = new_keypoints[i][np.array(limb_seq[link_idx]) - 1, 2]
+ if np.sum(conf > args.kpt_thr) == 2:
+ Y = new_keypoints[i][np.array(limb_seq[link_idx]) - 1, 0]
+ X = new_keypoints[i][np.array(limb_seq[link_idx]) - 1, 1]
+ mX = np.mean(X)
+ mY = np.mean(Y)
+ length = ((X[0] - X[1])**2 + (Y[0] - Y[1])**2)**0.5
+ angle = math.degrees(math.atan2(X[0] - X[1], Y[0] - Y[1]))
+ polygon = cv2.ellipse2Poly(
+ (int(mY), int(mX)), (int(length / 2), stickwidth), int(angle),
+ 0, 360, 1)
+ cv2.fillConvexPoly(cur_black_img, polygon, colors[link_idx])
+ black_img = cv2.addWeighted(black_img, 0.4, cur_black_img, 0.6, 0)
+
+ # save image
+ out_file = 'openpose_' + os.path.splitext(
+ os.path.basename(img_path))[0] + '.png'
+ cv2.imwrite(out_file, black_img[:, :, [2, 1, 0]])
+
+
+def main():
+ """Visualize the demo images.
+
+ Using mmdet to detect the human.
+ """
+ parser = ArgumentParser()
+ parser.add_argument('det_config', help='Config file for detection')
+ parser.add_argument('det_checkpoint', help='Checkpoint file for detection')
+ parser.add_argument('pose_config', help='Config file for pose')
+ parser.add_argument('pose_checkpoint', help='Checkpoint file for pose')
+ parser.add_argument('--input', type=str, help='input Image file')
+ parser.add_argument(
+ '--device', default='cuda:0', help='Device used for inference')
+ parser.add_argument(
+ '--det-cat-id',
+ type=int,
+ default=0,
+ help='Category id for bounding box detection model')
+ parser.add_argument(
+ '--bbox-thr',
+ type=float,
+ default=0.4,
+ help='Bounding box score threshold')
+ parser.add_argument(
+ '--nms-thr',
+ type=float,
+ default=0.3,
+ help='IoU threshold for bounding box NMS')
+ parser.add_argument(
+ '--kpt-thr', type=float, default=0.4, help='Keypoint score threshold')
+
+ assert has_mmdet, 'Please install mmdet to run the demo.'
+
+ args = parser.parse_args()
+
+ assert args.input != ''
+ assert args.det_config is not None
+ assert args.det_checkpoint is not None
+
+ # build detector
+ detector = init_detector(
+ args.det_config, args.det_checkpoint, device=args.device)
+
+ # build pose estimator
+ pose_estimator = init_pose_estimator(
+ args.pose_config,
+ args.pose_checkpoint,
+ device=args.device,
+ cfg_options=dict(model=dict(test_cfg=dict(output_heatmaps=False))))
+
+ input_type = mimetypes.guess_type(args.input)[0].split('/')[0]
+ if input_type == 'image':
+ mmpose_to_openpose_visualization(args, args.input, detector,
+ pose_estimator)
+
+
+if __name__ == '__main__':
+ main()
diff --git a/projects/pose_anything/README.md b/projects/pose_anything/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..c00b4a914ee00d4b8bbd08213fe3e040b13c02b1
--- /dev/null
+++ b/projects/pose_anything/README.md
@@ -0,0 +1,82 @@
+# Pose Anything: A Graph-Based Approach for Category-Agnostic Pose Estimation
+
+## [Paper](https://arxiv.org/pdf/2311.17891.pdf) | [Project Page](https://orhir.github.io/pose-anything/) | [Official Repo](https://github.com/orhir/PoseAnything)
+
+By [Or Hirschorn](https://scholar.google.co.il/citations?user=GgFuT_QAAAAJ&hl=iw&oi=ao)
+and [Shai Avidan](https://scholar.google.co.il/citations?hl=iw&user=hpItE1QAAAAJ)
+
+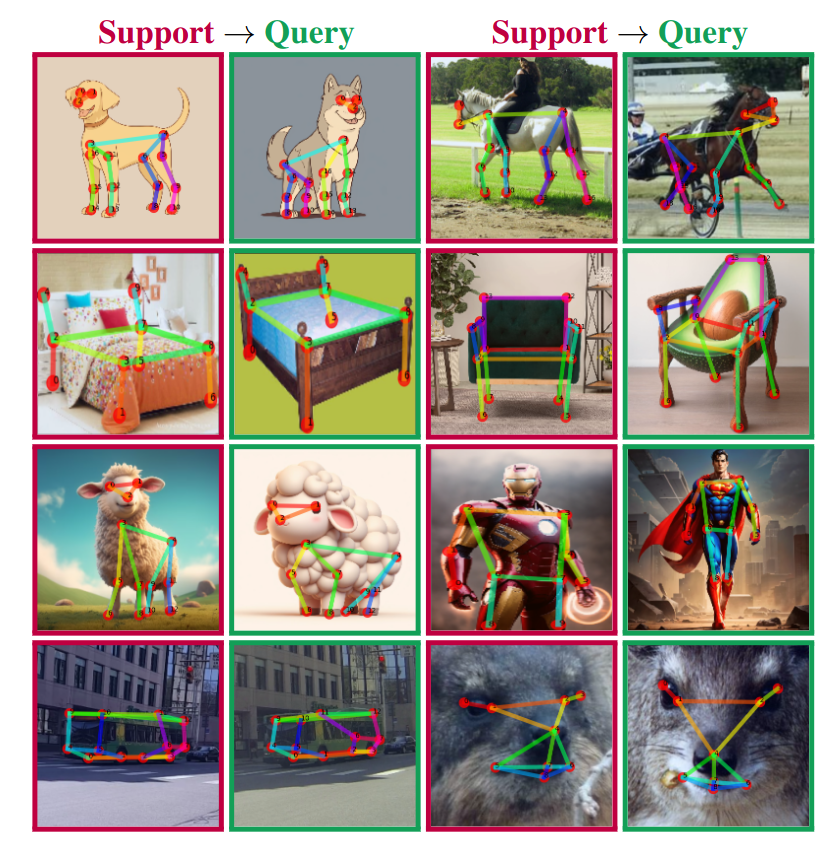
+
+## Introduction
+
+We present a novel approach to CAPE that leverages the inherent geometrical
+relations between keypoints through a newly designed Graph Transformer Decoder.
+By capturing and incorporating this crucial structural information, our method
+enhances the accuracy of keypoint localization, marking a significant departure
+from conventional CAPE techniques that treat keypoints as isolated entities.
+
+## Citation
+
+If you find this useful, please cite this work as follows:
+
+```bibtex
+@misc{hirschorn2023pose,
+ title={Pose Anything: A Graph-Based Approach for Category-Agnostic Pose Estimation},
+ author={Or Hirschorn and Shai Avidan},
+ year={2023},
+ eprint={2311.17891},
+ archivePrefix={arXiv},
+ primaryClass={cs.CV}
+}
+```
+
+## Getting Started
+
+📣 Pose Anything is available on OpenXLab now. [\[Try it online\]](https://openxlab.org.cn/apps/detail/orhir/Pose-Anything)
+
+### Install Dependencies
+
+We recommend using a virtual environment for running our code.
+After installing MMPose, you can install the rest of the dependencies by
+running:
+
+```
+pip install timm
+```
+
+### Pretrained Weights
+
+The full list of pretrained models can be found in
+the [Official Repo](https://github.com/orhir/PoseAnything).
+
+## Demo on Custom Images
+
+***A bigger and more accurate version of the model - COMING SOON!***
+
+Download
+the [pretrained model](https://drive.google.com/file/d/1RT1Q8AMEa1kj6k9ZqrtWIKyuR4Jn4Pqc/view?usp=drive_link)
+and run:
+
+```
+python demo.py --support [path_to_support_image] --query [path_to_query_image] --config configs/demo_b.py --checkpoint [path_to_pretrained_ckpt]
+```
+
+***Note:*** The demo code supports any config with suitable checkpoint file.
+More pre-trained models can be found in the official repo.
+
+## Training and Testing on MP-100 Dataset
+
+**We currently only support demo on custom images through the MMPose repo.**
+
+**For training and testing on the MP-100 dataset, please refer to
+the [Official Repo](https://github.com/orhir/PoseAnything).**
+
+## Acknowledgement
+
+Our code is based on code from:
+
+- [CapeFormer](https://github.com/flyinglynx/CapeFormer)
+
+## License
+
+This project is released under the Apache 2.0 license.
diff --git a/projects/pose_anything/configs/demo.py b/projects/pose_anything/configs/demo.py
new file mode 100644
index 0000000000000000000000000000000000000000..70a468a8f4f26524e4a4df3dad1c2bc471c0e1e1
--- /dev/null
+++ b/projects/pose_anything/configs/demo.py
@@ -0,0 +1,207 @@
+log_level = 'INFO'
+load_from = None
+resume_from = None
+dist_params = dict(backend='nccl')
+workflow = [('train', 1)]
+checkpoint_config = dict(interval=20)
+evaluation = dict(
+ interval=25,
+ metric=['PCK', 'NME', 'AUC', 'EPE'],
+ key_indicator='PCK',
+ gpu_collect=True,
+ res_folder='')
+optimizer = dict(
+ type='Adam',
+ lr=1e-5,
+)
+
+optimizer_config = dict(grad_clip=None)
+# learning policy
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=1000,
+ warmup_ratio=0.001,
+ step=[160, 180])
+total_epochs = 200
+log_config = dict(
+ interval=50,
+ hooks=[dict(type='TextLoggerHook'),
+ dict(type='TensorboardLoggerHook')])
+
+channel_cfg = dict(
+ num_output_channels=1,
+ dataset_joints=1,
+ dataset_channel=[
+ [
+ 0,
+ ],
+ ],
+ inference_channel=[
+ 0,
+ ],
+ max_kpt_num=100)
+
+# model settings
+model = dict(
+ type='TransformerPoseTwoStage',
+ pretrained='swinv2_large',
+ encoder_config=dict(
+ type='SwinTransformerV2',
+ embed_dim=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=16,
+ pretrained_window_sizes=[12, 12, 12, 6],
+ drop_path_rate=0.2,
+ img_size=256,
+ ),
+ keypoint_head=dict(
+ type='TwoStageHead',
+ in_channels=1536,
+ transformer=dict(
+ type='TwoStageSupportRefineTransformer',
+ d_model=384,
+ nhead=8,
+ num_encoder_layers=3,
+ num_decoder_layers=3,
+ dim_feedforward=1536,
+ dropout=0.1,
+ similarity_proj_dim=384,
+ dynamic_proj_dim=192,
+ activation='relu',
+ normalize_before=False,
+ return_intermediate_dec=True),
+ share_kpt_branch=False,
+ num_decoder_layer=3,
+ with_heatmap_loss=True,
+ support_pos_embed=False,
+ heatmap_loss_weight=2.0,
+ skeleton_loss_weight=0.02,
+ num_samples=0,
+ support_embedding_type='fixed',
+ num_support=100,
+ support_order_dropout=-1,
+ positional_encoding=dict(
+ type='SinePositionalEncoding', num_feats=192, normalize=True)),
+ # training and testing settings
+ train_cfg=dict(),
+ test_cfg=dict(
+ flip_test=False,
+ post_process='default',
+ shift_heatmap=True,
+ modulate_kernel=11))
+
+data_cfg = dict(
+ image_size=[256, 256],
+ heatmap_size=[64, 64],
+ num_output_channels=channel_cfg['num_output_channels'],
+ num_joints=channel_cfg['dataset_joints'],
+ dataset_channel=channel_cfg['dataset_channel'],
+ inference_channel=channel_cfg['inference_channel'])
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='TopDownGetRandomScaleRotation', rot_factor=15,
+ scale_factor=0.15),
+ dict(type='TopDownAffineFewShot'),
+ dict(type='ToTensor'),
+ dict(
+ type='NormalizeTensor',
+ mean=[0.485, 0.456, 0.406],
+ std=[0.229, 0.224, 0.225]),
+ dict(type='TopDownGenerateTargetFewShot', sigma=1),
+ dict(
+ type='Collect',
+ keys=['img', 'target', 'target_weight'],
+ meta_keys=[
+ 'image_file',
+ 'joints_3d',
+ 'joints_3d_visible',
+ 'center',
+ 'scale',
+ 'rotation',
+ 'bbox_score',
+ 'flip_pairs',
+ 'category_id',
+ 'skeleton',
+ ]),
+]
+
+valid_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='TopDownAffineFewShot'),
+ dict(type='ToTensor'),
+ dict(
+ type='NormalizeTensor',
+ mean=[0.485, 0.456, 0.406],
+ std=[0.229, 0.224, 0.225]),
+ dict(type='TopDownGenerateTargetFewShot', sigma=1),
+ dict(
+ type='Collect',
+ keys=['img', 'target', 'target_weight'],
+ meta_keys=[
+ 'image_file',
+ 'joints_3d',
+ 'joints_3d_visible',
+ 'center',
+ 'scale',
+ 'rotation',
+ 'bbox_score',
+ 'flip_pairs',
+ 'category_id',
+ 'skeleton',
+ ]),
+]
+
+test_pipeline = valid_pipeline
+
+data_root = 'data/mp100'
+data = dict(
+ samples_per_gpu=8,
+ workers_per_gpu=8,
+ train=dict(
+ type='TransformerPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_all.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ pipeline=train_pipeline),
+ val=dict(
+ type='TransformerPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_split1_val.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ num_queries=15,
+ num_episodes=100,
+ pipeline=valid_pipeline),
+ test=dict(
+ type='TestPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_split1_test.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ num_queries=15,
+ num_episodes=200,
+ pck_threshold_list=[0.05, 0.10, 0.15, 0.2, 0.25],
+ pipeline=test_pipeline),
+)
+vis_backends = [
+ dict(type='LocalVisBackend'),
+ dict(type='TensorboardVisBackend'),
+]
+visualizer = dict(
+ type='PoseLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+shuffle_cfg = dict(interval=1)
diff --git a/projects/pose_anything/configs/demo_b.py b/projects/pose_anything/configs/demo_b.py
new file mode 100644
index 0000000000000000000000000000000000000000..2b7d8b30ff3d36a2f39d568d19e7de5acdaee390
--- /dev/null
+++ b/projects/pose_anything/configs/demo_b.py
@@ -0,0 +1,205 @@
+custom_imports = dict(imports=['models'])
+
+log_level = 'INFO'
+load_from = None
+resume_from = None
+dist_params = dict(backend='nccl')
+workflow = [('train', 1)]
+checkpoint_config = dict(interval=20)
+evaluation = dict(
+ interval=25,
+ metric=['PCK', 'NME', 'AUC', 'EPE'],
+ key_indicator='PCK',
+ gpu_collect=True,
+ res_folder='')
+optimizer = dict(
+ type='Adam',
+ lr=1e-5,
+)
+
+optimizer_config = dict(grad_clip=None)
+# learning policy
+lr_config = dict(
+ policy='step',
+ warmup='linear',
+ warmup_iters=1000,
+ warmup_ratio=0.001,
+ step=[160, 180])
+total_epochs = 200
+log_config = dict(
+ interval=50,
+ hooks=[dict(type='TextLoggerHook'),
+ dict(type='TensorboardLoggerHook')])
+
+channel_cfg = dict(
+ num_output_channels=1,
+ dataset_joints=1,
+ dataset_channel=[
+ [
+ 0,
+ ],
+ ],
+ inference_channel=[
+ 0,
+ ],
+ max_kpt_num=100)
+
+# model settings
+model = dict(
+ type='PoseAnythingModel',
+ pretrained='swinv2_base',
+ encoder_config=dict(
+ type='SwinTransformerV2',
+ embed_dim=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=14,
+ pretrained_window_sizes=[12, 12, 12, 6],
+ drop_path_rate=0.1,
+ img_size=224,
+ ),
+ keypoint_head=dict(
+ type='PoseHead',
+ in_channels=1024,
+ transformer=dict(
+ type='EncoderDecoder',
+ d_model=256,
+ nhead=8,
+ num_encoder_layers=3,
+ num_decoder_layers=3,
+ graph_decoder='pre',
+ dim_feedforward=1024,
+ dropout=0.1,
+ similarity_proj_dim=256,
+ dynamic_proj_dim=128,
+ activation='relu',
+ normalize_before=False,
+ return_intermediate_dec=True),
+ share_kpt_branch=False,
+ num_decoder_layer=3,
+ with_heatmap_loss=True,
+ heatmap_loss_weight=2.0,
+ support_order_dropout=-1,
+ positional_encoding=dict(
+ type='SinePositionalEncoding', num_feats=128, normalize=True)),
+ # training and testing settings
+ train_cfg=dict(),
+ test_cfg=dict(
+ flip_test=False,
+ post_process='default',
+ shift_heatmap=True,
+ modulate_kernel=11))
+
+data_cfg = dict(
+ image_size=[224, 224],
+ heatmap_size=[64, 64],
+ num_output_channels=channel_cfg['num_output_channels'],
+ num_joints=channel_cfg['dataset_joints'],
+ dataset_channel=channel_cfg['dataset_channel'],
+ inference_channel=channel_cfg['inference_channel'])
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='TopDownGetRandomScaleRotation', rot_factor=15,
+ scale_factor=0.15),
+ dict(type='TopDownAffineFewShot'),
+ dict(type='ToTensor'),
+ dict(
+ type='NormalizeTensor',
+ mean=[0.485, 0.456, 0.406],
+ std=[0.229, 0.224, 0.225]),
+ dict(type='TopDownGenerateTargetFewShot', sigma=1),
+ dict(
+ type='Collect',
+ keys=['img', 'target', 'target_weight'],
+ meta_keys=[
+ 'image_file',
+ 'joints_3d',
+ 'joints_3d_visible',
+ 'center',
+ 'scale',
+ 'rotation',
+ 'bbox_score',
+ 'flip_pairs',
+ 'category_id',
+ 'skeleton',
+ ]),
+]
+
+valid_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='TopDownAffineFewShot'),
+ dict(type='ToTensor'),
+ dict(
+ type='NormalizeTensor',
+ mean=[0.485, 0.456, 0.406],
+ std=[0.229, 0.224, 0.225]),
+ dict(type='TopDownGenerateTargetFewShot', sigma=1),
+ dict(
+ type='Collect',
+ keys=['img', 'target', 'target_weight'],
+ meta_keys=[
+ 'image_file',
+ 'joints_3d',
+ 'joints_3d_visible',
+ 'center',
+ 'scale',
+ 'rotation',
+ 'bbox_score',
+ 'flip_pairs',
+ 'category_id',
+ 'skeleton',
+ ]),
+]
+
+test_pipeline = valid_pipeline
+
+data_root = 'data/mp100'
+data = dict(
+ samples_per_gpu=8,
+ workers_per_gpu=8,
+ train=dict(
+ type='TransformerPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_split1_train.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ pipeline=train_pipeline),
+ val=dict(
+ type='TransformerPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_split1_val.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ num_queries=15,
+ num_episodes=100,
+ pipeline=valid_pipeline),
+ test=dict(
+ type='TestPoseDataset',
+ ann_file=f'{data_root}/annotations/mp100_split1_test.json',
+ img_prefix=f'{data_root}/images/',
+ # img_prefix=f'{data_root}',
+ data_cfg=data_cfg,
+ valid_class_ids=None,
+ max_kpt_num=channel_cfg['max_kpt_num'],
+ num_shots=1,
+ num_queries=15,
+ num_episodes=200,
+ pck_threshold_list=[0.05, 0.10, 0.15, 0.2, 0.25],
+ pipeline=test_pipeline),
+)
+vis_backends = [
+ dict(type='LocalVisBackend'),
+ dict(type='TensorboardVisBackend'),
+]
+visualizer = dict(
+ type='PoseLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+shuffle_cfg = dict(interval=1)
diff --git a/projects/pose_anything/datasets/__init__.py b/projects/pose_anything/datasets/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..86bb3ce6513b2fa5d785d08d02cdea0a11b74ec3
--- /dev/null
+++ b/projects/pose_anything/datasets/__init__.py
@@ -0,0 +1 @@
+from .pipelines import * # noqa
diff --git a/projects/pose_anything/datasets/builder.py b/projects/pose_anything/datasets/builder.py
new file mode 100644
index 0000000000000000000000000000000000000000..9f44687143dc9e43af2932c73e4e79eeaf930052
--- /dev/null
+++ b/projects/pose_anything/datasets/builder.py
@@ -0,0 +1,56 @@
+from mmengine.dataset import RepeatDataset
+from mmengine.registry import build_from_cfg
+from torch.utils.data.dataset import ConcatDataset
+
+from mmpose.datasets.builder import DATASETS
+
+
+def _concat_cfg(cfg):
+ replace = ['ann_file', 'img_prefix']
+ channels = ['num_joints', 'dataset_channel']
+ concat_cfg = []
+ for i in range(len(cfg['type'])):
+ cfg_tmp = cfg.deepcopy()
+ cfg_tmp['type'] = cfg['type'][i]
+ for item in replace:
+ assert item in cfg_tmp
+ assert len(cfg['type']) == len(cfg[item]), (cfg[item])
+ cfg_tmp[item] = cfg[item][i]
+ for item in channels:
+ assert item in cfg_tmp['data_cfg']
+ assert len(cfg['type']) == len(cfg['data_cfg'][item])
+ cfg_tmp['data_cfg'][item] = cfg['data_cfg'][item][i]
+ concat_cfg.append(cfg_tmp)
+ return concat_cfg
+
+
+def _check_vaild(cfg):
+ replace = ['num_joints', 'dataset_channel']
+ if isinstance(cfg['data_cfg'][replace[0]], (list, tuple)):
+ for item in replace:
+ cfg['data_cfg'][item] = cfg['data_cfg'][item][0]
+ return cfg
+
+
+def build_dataset(cfg, default_args=None):
+ """Build a dataset from config dict.
+
+ Args:
+ cfg (dict): Config dict. It should at least contain the key "type".
+ default_args (dict, optional): Default initialization arguments.
+ Default: None.
+
+ Returns:
+ Dataset: The constructed dataset.
+ """
+ if isinstance(cfg['type'],
+ (list, tuple)): # In training, type=TransformerPoseDataset
+ dataset = ConcatDataset(
+ [build_dataset(c, default_args) for c in _concat_cfg(cfg)])
+ elif cfg['type'] == 'RepeatDataset':
+ dataset = RepeatDataset(
+ build_dataset(cfg['dataset'], default_args), cfg['times'])
+ else:
+ cfg = _check_vaild(cfg)
+ dataset = build_from_cfg(cfg, DATASETS, default_args)
+ return dataset
diff --git a/projects/pose_anything/datasets/datasets/__init__.py b/projects/pose_anything/datasets/datasets/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..124dcc3b151955b526425a778ea9a91d485d9ded
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/__init__.py
@@ -0,0 +1,7 @@
+from .mp100 import (FewShotBaseDataset, FewShotKeypointDataset,
+ TransformerBaseDataset, TransformerPoseDataset)
+
+__all__ = [
+ 'FewShotBaseDataset', 'FewShotKeypointDataset', 'TransformerBaseDataset',
+ 'TransformerPoseDataset'
+]
diff --git a/projects/pose_anything/datasets/datasets/mp100/__init__.py b/projects/pose_anything/datasets/datasets/mp100/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..229353517b0c95462c6b6d12120247988484d723
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/__init__.py
@@ -0,0 +1,11 @@
+from .fewshot_base_dataset import FewShotBaseDataset
+from .fewshot_dataset import FewShotKeypointDataset
+from .test_base_dataset import TestBaseDataset
+from .test_dataset import TestPoseDataset
+from .transformer_base_dataset import TransformerBaseDataset
+from .transformer_dataset import TransformerPoseDataset
+
+__all__ = [
+ 'FewShotKeypointDataset', 'FewShotBaseDataset', 'TransformerPoseDataset',
+ 'TransformerBaseDataset', 'TestBaseDataset', 'TestPoseDataset'
+]
diff --git a/projects/pose_anything/datasets/datasets/mp100/fewshot_base_dataset.py b/projects/pose_anything/datasets/datasets/mp100/fewshot_base_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..2746a0a35cd380a9f58ecc50480da509c3dac147
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/fewshot_base_dataset.py
@@ -0,0 +1,235 @@
+import copy
+from abc import ABCMeta, abstractmethod
+
+import json_tricks as json
+import numpy as np
+from mmcv.parallel import DataContainer as DC
+from torch.utils.data import Dataset
+
+from mmpose.core.evaluation.top_down_eval import keypoint_pck_accuracy
+from mmpose.datasets import DATASETS
+from mmpose.datasets.pipelines import Compose
+
+
+@DATASETS.register_module()
+class FewShotBaseDataset(Dataset, metaclass=ABCMeta):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ test_mode=False):
+ self.image_info = {}
+ self.ann_info = {}
+
+ self.annotations_path = ann_file
+ if not img_prefix.endswith('/'):
+ img_prefix = img_prefix + '/'
+ self.img_prefix = img_prefix
+ self.pipeline = pipeline
+ self.test_mode = test_mode
+
+ self.ann_info['image_size'] = np.array(data_cfg['image_size'])
+ self.ann_info['heatmap_size'] = np.array(data_cfg['heatmap_size'])
+ self.ann_info['num_joints'] = data_cfg['num_joints']
+
+ self.ann_info['flip_pairs'] = None
+
+ self.ann_info['inference_channel'] = data_cfg['inference_channel']
+ self.ann_info['num_output_channels'] = data_cfg['num_output_channels']
+ self.ann_info['dataset_channel'] = data_cfg['dataset_channel']
+
+ self.db = []
+ self.num_shots = 1
+ self.paired_samples = []
+ self.pipeline = Compose(self.pipeline)
+
+ @abstractmethod
+ def _get_db(self):
+ """Load dataset."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def _select_kpt(self, obj, kpt_id):
+ """Select kpt."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def evaluate(self, cfg, preds, output_dir, *args, **kwargs):
+ """Evaluate keypoint results."""
+ raise NotImplementedError
+
+ @staticmethod
+ def _write_keypoint_results(keypoints, res_file):
+ """Write results into a json file."""
+
+ with open(res_file, 'w') as f:
+ json.dump(keypoints, f, sort_keys=True, indent=4)
+
+ def _report_metric(self,
+ res_file,
+ metrics,
+ pck_thr=0.2,
+ pckh_thr=0.7,
+ auc_nor=30):
+ """Keypoint evaluation.
+
+ Args:
+ res_file (str): Json file stored prediction results.
+ metrics (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'PCKh', 'AUC', 'EPE'.
+ pck_thr (float): PCK threshold, default as 0.2.
+ pckh_thr (float): PCKh threshold, default as 0.7.
+ auc_nor (float): AUC normalization factor, default as 30 pixel.
+
+ Returns:
+ List: Evaluation results for evaluation metric.
+ """
+ info_str = []
+
+ with open(res_file, 'r') as fin:
+ preds = json.load(fin)
+ assert len(preds) == len(self.paired_samples)
+
+ outputs = []
+ gts = []
+ masks = []
+ threshold_bbox = []
+ threshold_head_box = []
+
+ for pred, pair in zip(preds, self.paired_samples):
+ item = self.db[pair[-1]]
+ outputs.append(np.array(pred['keypoints'])[:, :-1])
+ gts.append(np.array(item['joints_3d'])[:, :-1])
+
+ mask_query = ((np.array(item['joints_3d_visible'])[:, 0]) > 0)
+ mask_sample = ((np.array(
+ self.db[pair[0]]['joints_3d_visible'])[:, 0]) > 0)
+ for id_s in pair[:-1]:
+ mask_sample = np.bitwise_and(
+ mask_sample,
+ ((np.array(self.db[id_s]['joints_3d_visible'])[:, 0]) > 0))
+ masks.append(np.bitwise_and(mask_query, mask_sample))
+
+ if 'PCK' in metrics:
+ bbox = np.array(item['bbox'])
+ bbox_thr = np.max(bbox[2:])
+ threshold_bbox.append(np.array([bbox_thr, bbox_thr]))
+ if 'PCKh' in metrics:
+ head_box_thr = item['head_size']
+ threshold_head_box.append(
+ np.array([head_box_thr, head_box_thr]))
+
+ if 'PCK' in metrics:
+ pck_avg = []
+ for (output, gt, mask, thr_bbox) in zip(outputs, gts, masks,
+ threshold_bbox):
+ _, pck, _ = keypoint_pck_accuracy(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0), pck_thr,
+ np.expand_dims(thr_bbox, 0))
+ pck_avg.append(pck)
+ info_str.append(('PCK', np.mean(pck_avg)))
+
+ return info_str
+
+ def _merge_obj(self, Xs_list, Xq, idx):
+ """merge Xs_list and Xq.
+
+ :param Xs_list: N-shot samples X
+ :param Xq: query X
+ :param idx: id of paired_samples
+ :return: Xall
+ """
+ Xall = dict()
+ Xall['img_s'] = [Xs['img'] for Xs in Xs_list]
+ Xall['target_s'] = [Xs['target'] for Xs in Xs_list]
+ Xall['target_weight_s'] = [Xs['target_weight'] for Xs in Xs_list]
+ xs_img_metas = [Xs['img_metas'].data for Xs in Xs_list]
+
+ Xall['img_q'] = Xq['img']
+ Xall['target_q'] = Xq['target']
+ Xall['target_weight_q'] = Xq['target_weight']
+ xq_img_metas = Xq['img_metas'].data
+
+ img_metas = dict()
+ for key in xq_img_metas.keys():
+ img_metas['sample_' + key] = [
+ xs_img_meta[key] for xs_img_meta in xs_img_metas
+ ]
+ img_metas['query_' + key] = xq_img_metas[key]
+ img_metas['bbox_id'] = idx
+
+ Xall['img_metas'] = DC(img_metas, cpu_only=True)
+
+ return Xall
+
+ def __len__(self):
+ """Get the size of the dataset."""
+ return len(self.paired_samples)
+
+ def __getitem__(self, idx):
+ """Get the sample given index."""
+
+ pair_ids = self.paired_samples[idx]
+ assert len(pair_ids) == self.num_shots + 1
+ sample_id_list = pair_ids[:self.num_shots]
+ query_id = pair_ids[-1]
+
+ sample_obj_list = []
+ for sample_id in sample_id_list:
+ sample_obj = copy.deepcopy(self.db[sample_id])
+ sample_obj['ann_info'] = copy.deepcopy(self.ann_info)
+ sample_obj_list.append(sample_obj)
+
+ query_obj = copy.deepcopy(self.db[query_id])
+ query_obj['ann_info'] = copy.deepcopy(self.ann_info)
+
+ if not self.test_mode:
+ # randomly select "one" keypoint
+ sample_valid = (sample_obj_list[0]['joints_3d_visible'][:, 0] > 0)
+ for sample_obj in sample_obj_list:
+ sample_valid = sample_valid & (
+ sample_obj['joints_3d_visible'][:, 0] > 0)
+ query_valid = (query_obj['joints_3d_visible'][:, 0] > 0)
+
+ valid_s = np.where(sample_valid)[0]
+ valid_q = np.where(query_valid)[0]
+ valid_sq = np.where(sample_valid & query_valid)[0]
+ if len(valid_sq) > 0:
+ kpt_id = np.random.choice(valid_sq)
+ elif len(valid_s) > 0:
+ kpt_id = np.random.choice(valid_s)
+ elif len(valid_q) > 0:
+ kpt_id = np.random.choice(valid_q)
+ else:
+ kpt_id = np.random.choice(np.array(range(len(query_valid))))
+
+ for i in range(self.num_shots):
+ sample_obj_list[i] = self._select_kpt(sample_obj_list[i],
+ kpt_id)
+ query_obj = self._select_kpt(query_obj, kpt_id)
+
+ # when test, all keypoints will be preserved.
+
+ Xs_list = []
+ for sample_obj in sample_obj_list:
+ Xs = self.pipeline(sample_obj)
+ Xs_list.append(Xs)
+ Xq = self.pipeline(query_obj)
+
+ Xall = self._merge_obj(Xs_list, Xq, idx)
+ Xall['skeleton'] = self.db[query_id]['skeleton']
+
+ return Xall
+
+ def _sort_and_unique_bboxes(self, kpts, key='bbox_id'):
+ """sort kpts and remove the repeated ones."""
+ kpts = sorted(kpts, key=lambda x: x[key])
+ num = len(kpts)
+ for i in range(num - 1, 0, -1):
+ if kpts[i][key] == kpts[i - 1][key]:
+ del kpts[i]
+
+ return kpts
diff --git a/projects/pose_anything/datasets/datasets/mp100/fewshot_dataset.py b/projects/pose_anything/datasets/datasets/mp100/fewshot_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..bd8287966cce09b213f91636a3273d91b43e72ab
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/fewshot_dataset.py
@@ -0,0 +1,334 @@
+import os
+import random
+from collections import OrderedDict
+
+import numpy as np
+from xtcocotools.coco import COCO
+
+from mmpose.datasets import DATASETS
+from .fewshot_base_dataset import FewShotBaseDataset
+
+
+@DATASETS.register_module()
+class FewShotKeypointDataset(FewShotBaseDataset):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ valid_class_ids,
+ num_shots=1,
+ num_queries=100,
+ num_episodes=1,
+ test_mode=False):
+ super().__init__(
+ ann_file, img_prefix, data_cfg, pipeline, test_mode=test_mode)
+
+ self.ann_info['flip_pairs'] = []
+
+ self.ann_info['upper_body_ids'] = []
+ self.ann_info['lower_body_ids'] = []
+
+ self.ann_info['use_different_joint_weights'] = False
+ self.ann_info['joint_weights'] = np.array([
+ 1.,
+ ], dtype=np.float32).reshape((self.ann_info['num_joints'], 1))
+
+ self.coco = COCO(ann_file)
+
+ self.id2name, self.name2id = self._get_mapping_id_name(self.coco.imgs)
+ self.img_ids = self.coco.getImgIds()
+ self.classes = [
+ cat['name'] for cat in self.coco.loadCats(self.coco.getCatIds())
+ ]
+
+ self.num_classes = len(self.classes)
+ self._class_to_ind = dict(zip(self.classes, self.coco.getCatIds()))
+ self._ind_to_class = dict(zip(self.coco.getCatIds(), self.classes))
+
+ if valid_class_ids is not None:
+ self.valid_class_ids = valid_class_ids
+ else:
+ self.valid_class_ids = self.coco.getCatIds()
+ self.valid_classes = [
+ self._ind_to_class[ind] for ind in self.valid_class_ids
+ ]
+
+ self.cats = self.coco.cats
+
+ # Also update self.cat2obj
+ self.db = self._get_db()
+
+ self.num_shots = num_shots
+
+ if not test_mode:
+ # Update every training epoch
+ self.random_paired_samples()
+ else:
+ self.num_queries = num_queries
+ self.num_episodes = num_episodes
+ self.make_paired_samples()
+
+ def random_paired_samples(self):
+ num_datas = [
+ len(self.cat2obj[self._class_to_ind[cls]])
+ for cls in self.valid_classes
+ ]
+
+ # balance the dataset
+ max_num_data = max(num_datas)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for i in range(max_num_data):
+ shot = random.sample(self.cat2obj[cls], self.num_shots + 1)
+ all_samples.append(shot)
+
+ self.paired_samples = np.array(all_samples)
+ np.random.shuffle(self.paired_samples)
+
+ def make_paired_samples(self):
+ random.seed(1)
+ np.random.seed(0)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for _ in range(self.num_episodes):
+ shots = random.sample(self.cat2obj[cls],
+ self.num_shots + self.num_queries)
+ sample_ids = shots[:self.num_shots]
+ query_ids = shots[self.num_shots:]
+ for query_id in query_ids:
+ all_samples.append(sample_ids + [query_id])
+
+ self.paired_samples = np.array(all_samples)
+
+ def _select_kpt(self, obj, kpt_id):
+ obj['joints_3d'] = obj['joints_3d'][kpt_id:kpt_id + 1]
+ obj['joints_3d_visible'] = obj['joints_3d_visible'][kpt_id:kpt_id + 1]
+ obj['kpt_id'] = kpt_id
+
+ return obj
+
+ @staticmethod
+ def _get_mapping_id_name(imgs):
+ """
+ Args:
+ imgs (dict): dict of image info.
+
+ Returns:
+ tuple: Image name & id mapping dicts.
+
+ - id2name (dict): Mapping image id to name.
+ - name2id (dict): Mapping image name to id.
+ """
+ id2name = {}
+ name2id = {}
+ for image_id, image in imgs.items():
+ file_name = image['file_name']
+ id2name[image_id] = file_name
+ name2id[file_name] = image_id
+
+ return id2name, name2id
+
+ def _get_db(self):
+ """Ground truth bbox and keypoints."""
+ self.obj_id = 0
+
+ self.cat2obj = {}
+ for i in self.coco.getCatIds():
+ self.cat2obj.update({i: []})
+
+ gt_db = []
+ for img_id in self.img_ids:
+ gt_db.extend(self._load_coco_keypoint_annotation_kernel(img_id))
+ return gt_db
+
+ def _load_coco_keypoint_annotation_kernel(self, img_id):
+ """load annotation from COCOAPI.
+
+ Note:
+ bbox:[x1, y1, w, h]
+ Args:
+ img_id: coco image id
+ Returns:
+ dict: db entry
+ """
+ img_ann = self.coco.loadImgs(img_id)[0]
+ width = img_ann['width']
+ height = img_ann['height']
+
+ ann_ids = self.coco.getAnnIds(imgIds=img_id, iscrowd=False)
+ objs = self.coco.loadAnns(ann_ids)
+
+ # sanitize bboxes
+ valid_objs = []
+ for obj in objs:
+ if 'bbox' not in obj:
+ continue
+ x, y, w, h = obj['bbox']
+ x1 = max(0, x)
+ y1 = max(0, y)
+ x2 = min(width - 1, x1 + max(0, w - 1))
+ y2 = min(height - 1, y1 + max(0, h - 1))
+ if ('area' not in obj or obj['area'] > 0) and x2 > x1 and y2 > y1:
+ obj['clean_bbox'] = [x1, y1, x2 - x1, y2 - y1]
+ valid_objs.append(obj)
+ objs = valid_objs
+
+ bbox_id = 0
+ rec = []
+ for obj in objs:
+ if 'keypoints' not in obj:
+ continue
+ if max(obj['keypoints']) == 0:
+ continue
+ if 'num_keypoints' in obj and obj['num_keypoints'] == 0:
+ continue
+
+ category_id = obj['category_id']
+ # the number of keypoint for this specific category
+ cat_kpt_num = int(len(obj['keypoints']) / 3)
+
+ joints_3d = np.zeros((cat_kpt_num, 3), dtype=np.float32)
+ joints_3d_visible = np.zeros((cat_kpt_num, 3), dtype=np.float32)
+
+ keypoints = np.array(obj['keypoints']).reshape(-1, 3)
+ joints_3d[:, :2] = keypoints[:, :2]
+ joints_3d_visible[:, :2] = np.minimum(1, keypoints[:, 2:3])
+
+ center, scale = self._xywh2cs(*obj['clean_bbox'][:4])
+
+ image_file = os.path.join(self.img_prefix, self.id2name[img_id])
+
+ self.cat2obj[category_id].append(self.obj_id)
+
+ rec.append({
+ 'image_file':
+ image_file,
+ 'center':
+ center,
+ 'scale':
+ scale,
+ 'rotation':
+ 0,
+ 'bbox':
+ obj['clean_bbox'][:4],
+ 'bbox_score':
+ 1,
+ 'joints_3d':
+ joints_3d,
+ 'joints_3d_visible':
+ joints_3d_visible,
+ 'category_id':
+ category_id,
+ 'cat_kpt_num':
+ cat_kpt_num,
+ 'bbox_id':
+ self.obj_id,
+ 'skeleton':
+ self.coco.cats[obj['category_id']]['skeleton'],
+ })
+ bbox_id = bbox_id + 1
+ self.obj_id += 1
+
+ return rec
+
+ def _xywh2cs(self, x, y, w, h):
+ """This encodes bbox(x,y,w,w) into (center, scale)
+
+ Args:
+ x, y, w, h
+
+ Returns:
+ tuple: A tuple containing center and scale.
+
+ - center (np.ndarray[float32](2,)): center of the bbox (x, y).
+ - scale (np.ndarray[float32](2,)): scale of the bbox w & h.
+ """
+ aspect_ratio = self.ann_info['image_size'][0] / self.ann_info[
+ 'image_size'][1]
+ center = np.array([x + w * 0.5, y + h * 0.5], dtype=np.float32)
+ #
+ # if (not self.test_mode) and np.random.rand() < 0.3:
+ # center += 0.4 * (np.random.rand(2) - 0.5) * [w, h]
+
+ if w > aspect_ratio * h:
+ h = w * 1.0 / aspect_ratio
+ elif w < aspect_ratio * h:
+ w = h * aspect_ratio
+
+ # pixel std is 200.0
+ scale = np.array([w / 200.0, h / 200.0], dtype=np.float32)
+ # padding to include proper amount of context
+ scale = scale * 1.25
+
+ return center, scale
+
+ def evaluate(self, outputs, res_folder, metric='PCK', **kwargs):
+ """Evaluate interhand2d keypoint results. The pose prediction results
+ will be saved in `${res_folder}/result_keypoints.json`.
+
+ Note:
+ batch_size: N
+ num_keypoints: K
+ heatmap height: H
+ heatmap width: W
+
+ Args:
+ outputs (list(preds, boxes, image_path, output_heatmap))
+ :preds (np.ndarray[N,K,3]): The first two dimensions are
+ coordinates, score is the third dimension of the array.
+ :boxes (np.ndarray[N,6]): [center[0], center[1], scale[0]
+ , scale[1],area, score]
+ :image_paths (list[str]): For example, ['C', 'a', 'p', 't',
+ 'u', 'r', 'e', '1', '2', '/', '0', '3', '9', '0', '_',
+ 'd', 'h', '_', 't', 'o', 'u', 'c', 'h', 'R', 'O', 'M',
+ '/', 'c', 'a', 'm', '4', '1', '0', '2', '0', '9', '/',
+ 'i', 'm', 'a', 'g', 'e', '6', '2', '4', '3', '4', '.',
+ 'j', 'p', 'g']
+ :output_heatmap (np.ndarray[N, K, H, W]): model outputs.
+
+ res_folder (str): Path of directory to save the results.
+ metric (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'AUC', 'EPE'.
+
+ Returns:
+ dict: Evaluation results for evaluation metric.
+ """
+ metrics = metric if isinstance(metric, list) else [metric]
+ allowed_metrics = ['PCK', 'AUC', 'EPE']
+ for metric in metrics:
+ if metric not in allowed_metrics:
+ raise KeyError(f'metric {metric} is not supported')
+
+ res_file = os.path.join(res_folder, 'result_keypoints.json')
+
+ kpts = []
+ for output in outputs:
+ preds = output['preds']
+ boxes = output['boxes']
+ image_paths = output['image_paths']
+ bbox_ids = output['bbox_ids']
+
+ batch_size = len(image_paths)
+ for i in range(batch_size):
+ image_id = self.name2id[image_paths[i][len(self.img_prefix):]]
+
+ kpts.append({
+ 'keypoints': preds[i].tolist(),
+ 'center': boxes[i][0:2].tolist(),
+ 'scale': boxes[i][2:4].tolist(),
+ 'area': float(boxes[i][4]),
+ 'score': float(boxes[i][5]),
+ 'image_id': image_id,
+ 'bbox_id': bbox_ids[i]
+ })
+ kpts = self._sort_and_unique_bboxes(kpts)
+
+ self._write_keypoint_results(kpts, res_file)
+ info_str = self._report_metric(res_file, metrics)
+ name_value = OrderedDict(info_str)
+
+ return name_value
diff --git a/projects/pose_anything/datasets/datasets/mp100/test_base_dataset.py b/projects/pose_anything/datasets/datasets/mp100/test_base_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..8fffc842390f625bef1a4ba07b7608e9c3887694
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/test_base_dataset.py
@@ -0,0 +1,248 @@
+import copy
+from abc import ABCMeta, abstractmethod
+
+import json_tricks as json
+import numpy as np
+from mmcv.parallel import DataContainer as DC
+from torch.utils.data import Dataset
+
+from mmpose.core.evaluation.top_down_eval import (keypoint_auc, keypoint_epe,
+ keypoint_nme,
+ keypoint_pck_accuracy)
+from mmpose.datasets import DATASETS
+from mmpose.datasets.pipelines import Compose
+
+
+@DATASETS.register_module()
+class TestBaseDataset(Dataset, metaclass=ABCMeta):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ test_mode=True,
+ PCK_threshold_list=[0.05, 0.1, 0.15, 0.2, 0.25]):
+ self.image_info = {}
+ self.ann_info = {}
+
+ self.annotations_path = ann_file
+ if not img_prefix.endswith('/'):
+ img_prefix = img_prefix + '/'
+ self.img_prefix = img_prefix
+ self.pipeline = pipeline
+ self.test_mode = test_mode
+ self.PCK_threshold_list = PCK_threshold_list
+
+ self.ann_info['image_size'] = np.array(data_cfg['image_size'])
+ self.ann_info['heatmap_size'] = np.array(data_cfg['heatmap_size'])
+ self.ann_info['num_joints'] = data_cfg['num_joints']
+
+ self.ann_info['flip_pairs'] = None
+
+ self.ann_info['inference_channel'] = data_cfg['inference_channel']
+ self.ann_info['num_output_channels'] = data_cfg['num_output_channels']
+ self.ann_info['dataset_channel'] = data_cfg['dataset_channel']
+
+ self.db = []
+ self.num_shots = 1
+ self.paired_samples = []
+ self.pipeline = Compose(self.pipeline)
+
+ @abstractmethod
+ def _get_db(self):
+ """Load dataset."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def _select_kpt(self, obj, kpt_id):
+ """Select kpt."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def evaluate(self, cfg, preds, output_dir, *args, **kwargs):
+ """Evaluate keypoint results."""
+ raise NotImplementedError
+
+ @staticmethod
+ def _write_keypoint_results(keypoints, res_file):
+ """Write results into a json file."""
+
+ with open(res_file, 'w') as f:
+ json.dump(keypoints, f, sort_keys=True, indent=4)
+
+ def _report_metric(self, res_file, metrics):
+ """Keypoint evaluation.
+
+ Args:
+ res_file (str): Json file stored prediction results.
+ metrics (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'PCKh', 'AUC', 'EPE'.
+ pck_thr (float): PCK threshold, default as 0.2.
+ pckh_thr (float): PCKh threshold, default as 0.7.
+ auc_nor (float): AUC normalization factor, default as 30 pixel.
+
+ Returns:
+ List: Evaluation results for evaluation metric.
+ """
+ info_str = []
+
+ with open(res_file, 'r') as fin:
+ preds = json.load(fin)
+ assert len(preds) == len(self.paired_samples)
+
+ outputs = []
+ gts = []
+ masks = []
+ threshold_bbox = []
+ threshold_head_box = []
+
+ for pred, pair in zip(preds, self.paired_samples):
+ item = self.db[pair[-1]]
+ outputs.append(np.array(pred['keypoints'])[:, :-1])
+ gts.append(np.array(item['joints_3d'])[:, :-1])
+
+ mask_query = ((np.array(item['joints_3d_visible'])[:, 0]) > 0)
+ mask_sample = ((np.array(
+ self.db[pair[0]]['joints_3d_visible'])[:, 0]) > 0)
+ for id_s in pair[:-1]:
+ mask_sample = np.bitwise_and(
+ mask_sample,
+ ((np.array(self.db[id_s]['joints_3d_visible'])[:, 0]) > 0))
+ masks.append(np.bitwise_and(mask_query, mask_sample))
+
+ if 'PCK' in metrics or 'NME' in metrics or 'AUC' in metrics:
+ bbox = np.array(item['bbox'])
+ bbox_thr = np.max(bbox[2:])
+ threshold_bbox.append(np.array([bbox_thr, bbox_thr]))
+ if 'PCKh' in metrics:
+ head_box_thr = item['head_size']
+ threshold_head_box.append(
+ np.array([head_box_thr, head_box_thr]))
+
+ if 'PCK' in metrics:
+ pck_results = dict()
+ for pck_thr in self.PCK_threshold_list:
+ pck_results[pck_thr] = []
+
+ for (output, gt, mask, thr_bbox) in zip(outputs, gts, masks,
+ threshold_bbox):
+ for pck_thr in self.PCK_threshold_list:
+ _, pck, _ = keypoint_pck_accuracy(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0), pck_thr,
+ np.expand_dims(thr_bbox, 0))
+ pck_results[pck_thr].append(pck)
+
+ mPCK = 0
+ for pck_thr in self.PCK_threshold_list:
+ info_str.append(
+ ['PCK@' + str(pck_thr),
+ np.mean(pck_results[pck_thr])])
+ mPCK += np.mean(pck_results[pck_thr])
+ info_str.append(['mPCK', mPCK / len(self.PCK_threshold_list)])
+
+ if 'NME' in metrics:
+ nme_results = []
+ for (output, gt, mask, thr_bbox) in zip(outputs, gts, masks,
+ threshold_bbox):
+ nme = keypoint_nme(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0), np.expand_dims(thr_bbox, 0))
+ nme_results.append(nme)
+ info_str.append(['NME', np.mean(nme_results)])
+
+ if 'AUC' in metrics:
+ auc_results = []
+ for (output, gt, mask, thr_bbox) in zip(outputs, gts, masks,
+ threshold_bbox):
+ auc = keypoint_auc(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0), thr_bbox[0])
+ auc_results.append(auc)
+ info_str.append(['AUC', np.mean(auc_results)])
+
+ if 'EPE' in metrics:
+ epe_results = []
+ for (output, gt, mask) in zip(outputs, gts, masks):
+ epe = keypoint_epe(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0))
+ epe_results.append(epe)
+ info_str.append(['EPE', np.mean(epe_results)])
+ return info_str
+
+ def _merge_obj(self, Xs_list, Xq, idx):
+ """merge Xs_list and Xq.
+
+ :param Xs_list: N-shot samples X
+ :param Xq: query X
+ :param idx: id of paired_samples
+ :return: Xall
+ """
+ Xall = dict()
+ Xall['img_s'] = [Xs['img'] for Xs in Xs_list]
+ Xall['target_s'] = [Xs['target'] for Xs in Xs_list]
+ Xall['target_weight_s'] = [Xs['target_weight'] for Xs in Xs_list]
+ xs_img_metas = [Xs['img_metas'].data for Xs in Xs_list]
+
+ Xall['img_q'] = Xq['img']
+ Xall['target_q'] = Xq['target']
+ Xall['target_weight_q'] = Xq['target_weight']
+ xq_img_metas = Xq['img_metas'].data
+
+ img_metas = dict()
+ for key in xq_img_metas.keys():
+ img_metas['sample_' + key] = [
+ xs_img_meta[key] for xs_img_meta in xs_img_metas
+ ]
+ img_metas['query_' + key] = xq_img_metas[key]
+ img_metas['bbox_id'] = idx
+
+ Xall['img_metas'] = DC(img_metas, cpu_only=True)
+
+ return Xall
+
+ def __len__(self):
+ """Get the size of the dataset."""
+ return len(self.paired_samples)
+
+ def __getitem__(self, idx):
+ """Get the sample given index."""
+
+ pair_ids = self.paired_samples[idx] # [supported id * shots, query id]
+ assert len(pair_ids) == self.num_shots + 1
+ sample_id_list = pair_ids[:self.num_shots]
+ query_id = pair_ids[-1]
+
+ sample_obj_list = []
+ for sample_id in sample_id_list:
+ sample_obj = copy.deepcopy(self.db[sample_id])
+ sample_obj['ann_info'] = copy.deepcopy(self.ann_info)
+ sample_obj_list.append(sample_obj)
+
+ query_obj = copy.deepcopy(self.db[query_id])
+ query_obj['ann_info'] = copy.deepcopy(self.ann_info)
+
+ Xs_list = []
+ for sample_obj in sample_obj_list:
+ Xs = self.pipeline(
+ sample_obj
+ ) # dict with ['img', 'target', 'target_weight', 'img_metas'],
+ Xs_list.append(Xs) # Xs['target'] is of shape [100, map_h, map_w]
+ Xq = self.pipeline(query_obj)
+
+ Xall = self._merge_obj(Xs_list, Xq, idx)
+ Xall['skeleton'] = self.db[query_id]['skeleton']
+
+ return Xall
+
+ def _sort_and_unique_bboxes(self, kpts, key='bbox_id'):
+ """sort kpts and remove the repeated ones."""
+ kpts = sorted(kpts, key=lambda x: x[key])
+ num = len(kpts)
+ for i in range(num - 1, 0, -1):
+ if kpts[i][key] == kpts[i - 1][key]:
+ del kpts[i]
+
+ return kpts
diff --git a/projects/pose_anything/datasets/datasets/mp100/test_dataset.py b/projects/pose_anything/datasets/datasets/mp100/test_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..ca0dc7ac6a86cc3af17a9a558628b45fbaf46500
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/test_dataset.py
@@ -0,0 +1,347 @@
+import os
+import random
+from collections import OrderedDict
+
+import numpy as np
+from xtcocotools.coco import COCO
+
+from mmpose.datasets import DATASETS
+from .test_base_dataset import TestBaseDataset
+
+
+@DATASETS.register_module()
+class TestPoseDataset(TestBaseDataset):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ valid_class_ids,
+ max_kpt_num=None,
+ num_shots=1,
+ num_queries=100,
+ num_episodes=1,
+ pck_threshold_list=[0.05, 0.1, 0.15, 0.20, 0.25],
+ test_mode=True):
+ super().__init__(
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ test_mode=test_mode,
+ PCK_threshold_list=pck_threshold_list)
+
+ self.ann_info['flip_pairs'] = []
+
+ self.ann_info['upper_body_ids'] = []
+ self.ann_info['lower_body_ids'] = []
+
+ self.ann_info['use_different_joint_weights'] = False
+ self.ann_info['joint_weights'] = np.array([
+ 1.,
+ ], dtype=np.float32).reshape((self.ann_info['num_joints'], 1))
+
+ self.coco = COCO(ann_file)
+
+ self.id2name, self.name2id = self._get_mapping_id_name(self.coco.imgs)
+ self.img_ids = self.coco.getImgIds()
+ self.classes = [
+ cat['name'] for cat in self.coco.loadCats(self.coco.getCatIds())
+ ]
+
+ self.num_classes = len(self.classes)
+ self._class_to_ind = dict(zip(self.classes, self.coco.getCatIds()))
+ self._ind_to_class = dict(zip(self.coco.getCatIds(), self.classes))
+
+ if valid_class_ids is not None: # None by default
+ self.valid_class_ids = valid_class_ids
+ else:
+ self.valid_class_ids = self.coco.getCatIds()
+ self.valid_classes = [
+ self._ind_to_class[ind] for ind in self.valid_class_ids
+ ]
+
+ self.cats = self.coco.cats
+ self.max_kpt_num = max_kpt_num
+
+ # Also update self.cat2obj
+ self.db = self._get_db()
+
+ self.num_shots = num_shots
+
+ if not test_mode:
+ # Update every training epoch
+ self.random_paired_samples()
+ else:
+ self.num_queries = num_queries
+ self.num_episodes = num_episodes
+ self.make_paired_samples()
+
+ def random_paired_samples(self):
+ num_datas = [
+ len(self.cat2obj[self._class_to_ind[cls]])
+ for cls in self.valid_classes
+ ]
+
+ # balance the dataset
+ max_num_data = max(num_datas)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for i in range(max_num_data):
+ shot = random.sample(self.cat2obj[cls], self.num_shots + 1)
+ all_samples.append(shot)
+
+ self.paired_samples = np.array(all_samples)
+ np.random.shuffle(self.paired_samples)
+
+ def make_paired_samples(self):
+ random.seed(1)
+ np.random.seed(0)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for _ in range(self.num_episodes):
+ shots = random.sample(self.cat2obj[cls],
+ self.num_shots + self.num_queries)
+ sample_ids = shots[:self.num_shots]
+ query_ids = shots[self.num_shots:]
+ for query_id in query_ids:
+ all_samples.append(sample_ids + [query_id])
+
+ self.paired_samples = np.array(all_samples)
+
+ def _select_kpt(self, obj, kpt_id):
+ obj['joints_3d'] = obj['joints_3d'][kpt_id:kpt_id + 1]
+ obj['joints_3d_visible'] = obj['joints_3d_visible'][kpt_id:kpt_id + 1]
+ obj['kpt_id'] = kpt_id
+
+ return obj
+
+ @staticmethod
+ def _get_mapping_id_name(imgs):
+ """
+ Args:
+ imgs (dict): dict of image info.
+
+ Returns:
+ tuple: Image name & id mapping dicts.
+
+ - id2name (dict): Mapping image id to name.
+ - name2id (dict): Mapping image name to id.
+ """
+ id2name = {}
+ name2id = {}
+ for image_id, image in imgs.items():
+ file_name = image['file_name']
+ id2name[image_id] = file_name
+ name2id[file_name] = image_id
+
+ return id2name, name2id
+
+ def _get_db(self):
+ """Ground truth bbox and keypoints."""
+ self.obj_id = 0
+
+ self.cat2obj = {}
+ for i in self.coco.getCatIds():
+ self.cat2obj.update({i: []})
+
+ gt_db = []
+ for img_id in self.img_ids:
+ gt_db.extend(self._load_coco_keypoint_annotation_kernel(img_id))
+ return gt_db
+
+ def _load_coco_keypoint_annotation_kernel(self, img_id):
+ """load annotation from COCOAPI.
+
+ Note:
+ bbox:[x1, y1, w, h]
+ Args:
+ img_id: coco image id
+ Returns:
+ dict: db entry
+ """
+ img_ann = self.coco.loadImgs(img_id)[0]
+ width = img_ann['width']
+ height = img_ann['height']
+
+ ann_ids = self.coco.getAnnIds(imgIds=img_id, iscrowd=False)
+ objs = self.coco.loadAnns(ann_ids)
+
+ # sanitize bboxes
+ valid_objs = []
+ for obj in objs:
+ if 'bbox' not in obj:
+ continue
+ x, y, w, h = obj['bbox']
+ x1 = max(0, x)
+ y1 = max(0, y)
+ x2 = min(width - 1, x1 + max(0, w - 1))
+ y2 = min(height - 1, y1 + max(0, h - 1))
+ if ('area' not in obj or obj['area'] > 0) and x2 > x1 and y2 > y1:
+ obj['clean_bbox'] = [x1, y1, x2 - x1, y2 - y1]
+ valid_objs.append(obj)
+ objs = valid_objs
+
+ bbox_id = 0
+ rec = []
+ for obj in objs:
+ if 'keypoints' not in obj:
+ continue
+ if max(obj['keypoints']) == 0:
+ continue
+ if 'num_keypoints' in obj and obj['num_keypoints'] == 0:
+ continue
+
+ category_id = obj['category_id']
+ # the number of keypoint for this specific category
+ cat_kpt_num = int(len(obj['keypoints']) / 3)
+ if self.max_kpt_num is None:
+ kpt_num = cat_kpt_num
+ else:
+ kpt_num = self.max_kpt_num
+
+ joints_3d = np.zeros((kpt_num, 3), dtype=np.float32)
+ joints_3d_visible = np.zeros((kpt_num, 3), dtype=np.float32)
+
+ keypoints = np.array(obj['keypoints']).reshape(-1, 3)
+ joints_3d[:cat_kpt_num, :2] = keypoints[:, :2]
+ joints_3d_visible[:cat_kpt_num, :2] = np.minimum(
+ 1, keypoints[:, 2:3])
+
+ center, scale = self._xywh2cs(*obj['clean_bbox'][:4])
+
+ image_file = os.path.join(self.img_prefix, self.id2name[img_id])
+
+ self.cat2obj[category_id].append(self.obj_id)
+
+ rec.append({
+ 'image_file':
+ image_file,
+ 'center':
+ center,
+ 'scale':
+ scale,
+ 'rotation':
+ 0,
+ 'bbox':
+ obj['clean_bbox'][:4],
+ 'bbox_score':
+ 1,
+ 'joints_3d':
+ joints_3d,
+ 'joints_3d_visible':
+ joints_3d_visible,
+ 'category_id':
+ category_id,
+ 'cat_kpt_num':
+ cat_kpt_num,
+ 'bbox_id':
+ self.obj_id,
+ 'skeleton':
+ self.coco.cats[obj['category_id']]['skeleton'],
+ })
+ bbox_id = bbox_id + 1
+ self.obj_id += 1
+
+ return rec
+
+ def _xywh2cs(self, x, y, w, h):
+ """This encodes bbox(x,y,w,w) into (center, scale)
+
+ Args:
+ x, y, w, h
+
+ Returns:
+ tuple: A tuple containing center and scale.
+
+ - center (np.ndarray[float32](2,)): center of the bbox (x, y).
+ - scale (np.ndarray[float32](2,)): scale of the bbox w & h.
+ """
+ aspect_ratio = self.ann_info['image_size'][0] / self.ann_info[
+ 'image_size'][1]
+ center = np.array([x + w * 0.5, y + h * 0.5], dtype=np.float32)
+ #
+ # if (not self.test_mode) and np.random.rand() < 0.3:
+ # center += 0.4 * (np.random.rand(2) - 0.5) * [w, h]
+
+ if w > aspect_ratio * h:
+ h = w * 1.0 / aspect_ratio
+ elif w < aspect_ratio * h:
+ w = h * aspect_ratio
+
+ # pixel std is 200.0
+ scale = np.array([w / 200.0, h / 200.0], dtype=np.float32)
+ # padding to include proper amount of context
+ scale = scale * 1.25
+
+ return center, scale
+
+ def evaluate(self, outputs, res_folder, metric='PCK', **kwargs):
+ """Evaluate interhand2d keypoint results. The pose prediction results
+ will be saved in `${res_folder}/result_keypoints.json`.
+
+ Note:
+ batch_size: N
+ num_keypoints: K
+ heatmap height: H
+ heatmap width: W
+
+ Args:
+ outputs (list(preds, boxes, image_path, output_heatmap))
+ :preds (np.ndarray[N,K,3]): The first two dimensions are
+ coordinates, score is the third dimension of the array.
+ :boxes (np.ndarray[N,6]): [center[0], center[1], scale[0]
+ , scale[1],area, score]
+ :image_paths (list[str]): For example, ['C', 'a', 'p', 't',
+ 'u', 'r', 'e', '1', '2', '/', '0', '3', '9', '0', '_',
+ 'd', 'h', '_', 't', 'o', 'u', 'c', 'h', 'R', 'O', 'M',
+ '/', 'c', 'a', 'm', '4', '1', '0', '2', '0', '9', '/',
+ 'i', 'm', 'a', 'g', 'e', '6', '2', '4', '3', '4', '.',
+ 'j', 'p', 'g']
+ :output_heatmap (np.ndarray[N, K, H, W]): model outputs.
+
+ res_folder (str): Path of directory to save the results.
+ metric (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'AUC', 'EPE'.
+
+ Returns:
+ dict: Evaluation results for evaluation metric.
+ """
+ metrics = metric if isinstance(metric, list) else [metric]
+ allowed_metrics = ['PCK', 'AUC', 'EPE', 'NME']
+ for metric in metrics:
+ if metric not in allowed_metrics:
+ raise KeyError(f'metric {metric} is not supported')
+
+ res_file = os.path.join(res_folder, 'result_keypoints.json')
+
+ kpts = []
+ for output in outputs:
+ preds = output['preds']
+ boxes = output['boxes']
+ image_paths = output['image_paths']
+ bbox_ids = output['bbox_ids']
+
+ batch_size = len(image_paths)
+ for i in range(batch_size):
+ image_id = self.name2id[image_paths[i][len(self.img_prefix):]]
+
+ kpts.append({
+ 'keypoints': preds[i].tolist(),
+ 'center': boxes[i][0:2].tolist(),
+ 'scale': boxes[i][2:4].tolist(),
+ 'area': float(boxes[i][4]),
+ 'score': float(boxes[i][5]),
+ 'image_id': image_id,
+ 'bbox_id': bbox_ids[i]
+ })
+ kpts = self._sort_and_unique_bboxes(kpts)
+
+ self._write_keypoint_results(kpts, res_file)
+ info_str = self._report_metric(res_file, metrics)
+ name_value = OrderedDict(info_str)
+
+ return name_value
diff --git a/projects/pose_anything/datasets/datasets/mp100/transformer_base_dataset.py b/projects/pose_anything/datasets/datasets/mp100/transformer_base_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..9433596a0e5a2616329814f64a23e9254eb68bbd
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/transformer_base_dataset.py
@@ -0,0 +1,209 @@
+import copy
+from abc import ABCMeta, abstractmethod
+
+import json_tricks as json
+import numpy as np
+from mmcv.parallel import DataContainer as DC
+from mmengine.dataset import Compose
+from torch.utils.data import Dataset
+
+from mmpose.core.evaluation.top_down_eval import keypoint_pck_accuracy
+from mmpose.datasets import DATASETS
+
+
+@DATASETS.register_module()
+class TransformerBaseDataset(Dataset, metaclass=ABCMeta):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ test_mode=False):
+ self.image_info = {}
+ self.ann_info = {}
+
+ self.annotations_path = ann_file
+ if not img_prefix.endswith('/'):
+ img_prefix = img_prefix + '/'
+ self.img_prefix = img_prefix
+ self.pipeline = pipeline
+ self.test_mode = test_mode
+
+ self.ann_info['image_size'] = np.array(data_cfg['image_size'])
+ self.ann_info['heatmap_size'] = np.array(data_cfg['heatmap_size'])
+ self.ann_info['num_joints'] = data_cfg['num_joints']
+
+ self.ann_info['flip_pairs'] = None
+
+ self.ann_info['inference_channel'] = data_cfg['inference_channel']
+ self.ann_info['num_output_channels'] = data_cfg['num_output_channels']
+ self.ann_info['dataset_channel'] = data_cfg['dataset_channel']
+
+ self.db = []
+ self.num_shots = 1
+ self.paired_samples = []
+ self.pipeline = Compose(self.pipeline)
+
+ @abstractmethod
+ def _get_db(self):
+ """Load dataset."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def _select_kpt(self, obj, kpt_id):
+ """Select kpt."""
+ raise NotImplementedError
+
+ @abstractmethod
+ def evaluate(self, cfg, preds, output_dir, *args, **kwargs):
+ """Evaluate keypoint results."""
+ raise NotImplementedError
+
+ @staticmethod
+ def _write_keypoint_results(keypoints, res_file):
+ """Write results into a json file."""
+
+ with open(res_file, 'w') as f:
+ json.dump(keypoints, f, sort_keys=True, indent=4)
+
+ def _report_metric(self,
+ res_file,
+ metrics,
+ pck_thr=0.2,
+ pckh_thr=0.7,
+ auc_nor=30):
+ """Keypoint evaluation.
+
+ Args:
+ res_file (str): Json file stored prediction results.
+ metrics (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'PCKh', 'AUC', 'EPE'.
+ pck_thr (float): PCK threshold, default as 0.2.
+ pckh_thr (float): PCKh threshold, default as 0.7.
+ auc_nor (float): AUC normalization factor, default as 30 pixel.
+
+ Returns:
+ List: Evaluation results for evaluation metric.
+ """
+ info_str = []
+
+ with open(res_file, 'r') as fin:
+ preds = json.load(fin)
+ assert len(preds) == len(self.paired_samples)
+
+ outputs = []
+ gts = []
+ masks = []
+ threshold_bbox = []
+ threshold_head_box = []
+
+ for pred, pair in zip(preds, self.paired_samples):
+ item = self.db[pair[-1]]
+ outputs.append(np.array(pred['keypoints'])[:, :-1])
+ gts.append(np.array(item['joints_3d'])[:, :-1])
+
+ mask_query = ((np.array(item['joints_3d_visible'])[:, 0]) > 0)
+ mask_sample = ((np.array(
+ self.db[pair[0]]['joints_3d_visible'])[:, 0]) > 0)
+ for id_s in pair[:-1]:
+ mask_sample = np.bitwise_and(
+ mask_sample,
+ ((np.array(self.db[id_s]['joints_3d_visible'])[:, 0]) > 0))
+ masks.append(np.bitwise_and(mask_query, mask_sample))
+
+ if 'PCK' in metrics:
+ bbox = np.array(item['bbox'])
+ bbox_thr = np.max(bbox[2:])
+ threshold_bbox.append(np.array([bbox_thr, bbox_thr]))
+ if 'PCKh' in metrics:
+ head_box_thr = item['head_size']
+ threshold_head_box.append(
+ np.array([head_box_thr, head_box_thr]))
+
+ if 'PCK' in metrics:
+ pck_avg = []
+ for (output, gt, mask, thr_bbox) in zip(outputs, gts, masks,
+ threshold_bbox):
+ _, pck, _ = keypoint_pck_accuracy(
+ np.expand_dims(output, 0), np.expand_dims(gt, 0),
+ np.expand_dims(mask, 0), pck_thr,
+ np.expand_dims(thr_bbox, 0))
+ pck_avg.append(pck)
+ info_str.append(('PCK', np.mean(pck_avg)))
+
+ return info_str
+
+ def _merge_obj(self, Xs_list, Xq, idx):
+ """merge Xs_list and Xq.
+
+ :param Xs_list: N-shot samples X
+ :param Xq: query X
+ :param idx: id of paired_samples
+ :return: Xall
+ """
+ Xall = dict()
+ Xall['img_s'] = [Xs['img'] for Xs in Xs_list]
+ Xall['target_s'] = [Xs['target'] for Xs in Xs_list]
+ Xall['target_weight_s'] = [Xs['target_weight'] for Xs in Xs_list]
+ xs_img_metas = [Xs['img_metas'].data for Xs in Xs_list]
+
+ Xall['img_q'] = Xq['img']
+ Xall['target_q'] = Xq['target']
+ Xall['target_weight_q'] = Xq['target_weight']
+ xq_img_metas = Xq['img_metas'].data
+
+ img_metas = dict()
+ for key in xq_img_metas.keys():
+ img_metas['sample_' + key] = [
+ xs_img_meta[key] for xs_img_meta in xs_img_metas
+ ]
+ img_metas['query_' + key] = xq_img_metas[key]
+ img_metas['bbox_id'] = idx
+
+ Xall['img_metas'] = DC(img_metas, cpu_only=True)
+
+ return Xall
+
+ def __len__(self):
+ """Get the size of the dataset."""
+ return len(self.paired_samples)
+
+ def __getitem__(self, idx):
+ """Get the sample given index."""
+
+ pair_ids = self.paired_samples[idx] # [supported id * shots, query id]
+ assert len(pair_ids) == self.num_shots + 1
+ sample_id_list = pair_ids[:self.num_shots]
+ query_id = pair_ids[-1]
+
+ sample_obj_list = []
+ for sample_id in sample_id_list:
+ sample_obj = copy.deepcopy(self.db[sample_id])
+ sample_obj['ann_info'] = copy.deepcopy(self.ann_info)
+ sample_obj_list.append(sample_obj)
+
+ query_obj = copy.deepcopy(self.db[query_id])
+ query_obj['ann_info'] = copy.deepcopy(self.ann_info)
+
+ Xs_list = []
+ for sample_obj in sample_obj_list:
+ Xs = self.pipeline(
+ sample_obj
+ ) # dict with ['img', 'target', 'target_weight', 'img_metas'],
+ Xs_list.append(Xs) # Xs['target'] is of shape [100, map_h, map_w]
+ Xq = self.pipeline(query_obj)
+
+ Xall = self._merge_obj(Xs_list, Xq, idx)
+ Xall['skeleton'] = self.db[query_id]['skeleton']
+ return Xall
+
+ def _sort_and_unique_bboxes(self, kpts, key='bbox_id'):
+ """sort kpts and remove the repeated ones."""
+ kpts = sorted(kpts, key=lambda x: x[key])
+ num = len(kpts)
+ for i in range(num - 1, 0, -1):
+ if kpts[i][key] == kpts[i - 1][key]:
+ del kpts[i]
+
+ return kpts
diff --git a/projects/pose_anything/datasets/datasets/mp100/transformer_dataset.py b/projects/pose_anything/datasets/datasets/mp100/transformer_dataset.py
new file mode 100644
index 0000000000000000000000000000000000000000..3244f2a0d71f648bccc4be1d85eba57eb2da4a56
--- /dev/null
+++ b/projects/pose_anything/datasets/datasets/mp100/transformer_dataset.py
@@ -0,0 +1,342 @@
+import os
+import random
+from collections import OrderedDict
+
+import numpy as np
+from xtcocotools.coco import COCO
+
+from mmpose.datasets import DATASETS
+from .transformer_base_dataset import TransformerBaseDataset
+
+
+@DATASETS.register_module()
+class TransformerPoseDataset(TransformerBaseDataset):
+
+ def __init__(self,
+ ann_file,
+ img_prefix,
+ data_cfg,
+ pipeline,
+ valid_class_ids,
+ max_kpt_num=None,
+ num_shots=1,
+ num_queries=100,
+ num_episodes=1,
+ test_mode=False):
+ super().__init__(
+ ann_file, img_prefix, data_cfg, pipeline, test_mode=test_mode)
+
+ self.ann_info['flip_pairs'] = []
+
+ self.ann_info['upper_body_ids'] = []
+ self.ann_info['lower_body_ids'] = []
+
+ self.ann_info['use_different_joint_weights'] = False
+ self.ann_info['joint_weights'] = np.array([
+ 1.,
+ ], dtype=np.float32).reshape((self.ann_info['num_joints'], 1))
+
+ self.coco = COCO(ann_file)
+
+ self.id2name, self.name2id = self._get_mapping_id_name(self.coco.imgs)
+ self.img_ids = self.coco.getImgIds()
+ self.classes = [
+ cat['name'] for cat in self.coco.loadCats(self.coco.getCatIds())
+ ]
+
+ self.num_classes = len(self.classes)
+ self._class_to_ind = dict(zip(self.classes, self.coco.getCatIds()))
+ self._ind_to_class = dict(zip(self.coco.getCatIds(), self.classes))
+
+ if valid_class_ids is not None: # None by default
+ self.valid_class_ids = valid_class_ids
+ else:
+ self.valid_class_ids = self.coco.getCatIds()
+ self.valid_classes = [
+ self._ind_to_class[ind] for ind in self.valid_class_ids
+ ]
+
+ self.cats = self.coco.cats
+ self.max_kpt_num = max_kpt_num
+
+ # Also update self.cat2obj
+ self.db = self._get_db()
+
+ self.num_shots = num_shots
+
+ if not test_mode:
+ # Update every training epoch
+ self.random_paired_samples()
+ else:
+ self.num_queries = num_queries
+ self.num_episodes = num_episodes
+ self.make_paired_samples()
+
+ def random_paired_samples(self):
+ num_datas = [
+ len(self.cat2obj[self._class_to_ind[cls]])
+ for cls in self.valid_classes
+ ]
+
+ # balance the dataset
+ max_num_data = max(num_datas)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for i in range(max_num_data):
+ shot = random.sample(self.cat2obj[cls], self.num_shots + 1)
+ all_samples.append(shot)
+
+ self.paired_samples = np.array(all_samples)
+ np.random.shuffle(self.paired_samples)
+
+ def make_paired_samples(self):
+ random.seed(1)
+ np.random.seed(0)
+
+ all_samples = []
+ for cls in self.valid_class_ids:
+ for _ in range(self.num_episodes):
+ shots = random.sample(self.cat2obj[cls],
+ self.num_shots + self.num_queries)
+ sample_ids = shots[:self.num_shots]
+ query_ids = shots[self.num_shots:]
+ for query_id in query_ids:
+ all_samples.append(sample_ids + [query_id])
+
+ self.paired_samples = np.array(all_samples)
+
+ def _select_kpt(self, obj, kpt_id):
+ obj['joints_3d'] = obj['joints_3d'][kpt_id:kpt_id + 1]
+ obj['joints_3d_visible'] = obj['joints_3d_visible'][kpt_id:kpt_id + 1]
+ obj['kpt_id'] = kpt_id
+
+ return obj
+
+ @staticmethod
+ def _get_mapping_id_name(imgs):
+ """
+ Args:
+ imgs (dict): dict of image info.
+
+ Returns:
+ tuple: Image name & id mapping dicts.
+
+ - id2name (dict): Mapping image id to name.
+ - name2id (dict): Mapping image name to id.
+ """
+ id2name = {}
+ name2id = {}
+ for image_id, image in imgs.items():
+ file_name = image['file_name']
+ id2name[image_id] = file_name
+ name2id[file_name] = image_id
+
+ return id2name, name2id
+
+ def _get_db(self):
+ """Ground truth bbox and keypoints."""
+ self.obj_id = 0
+
+ self.cat2obj = {}
+ for i in self.coco.getCatIds():
+ self.cat2obj.update({i: []})
+
+ gt_db = []
+ for img_id in self.img_ids:
+ gt_db.extend(self._load_coco_keypoint_annotation_kernel(img_id))
+
+ return gt_db
+
+ def _load_coco_keypoint_annotation_kernel(self, img_id):
+ """load annotation from COCOAPI.
+
+ Note:
+ bbox:[x1, y1, w, h]
+ Args:
+ img_id: coco image id
+ Returns:
+ dict: db entry
+ """
+ img_ann = self.coco.loadImgs(img_id)[0]
+ width = img_ann['width']
+ height = img_ann['height']
+
+ ann_ids = self.coco.getAnnIds(imgIds=img_id, iscrowd=False)
+ objs = self.coco.loadAnns(ann_ids)
+
+ # sanitize bboxes
+ valid_objs = []
+ for obj in objs:
+ if 'bbox' not in obj:
+ continue
+ x, y, w, h = obj['bbox']
+ x1 = max(0, x)
+ y1 = max(0, y)
+ x2 = min(width - 1, x1 + max(0, w - 1))
+ y2 = min(height - 1, y1 + max(0, h - 1))
+ if ('area' not in obj or obj['area'] > 0) and x2 > x1 and y2 > y1:
+ obj['clean_bbox'] = [x1, y1, x2 - x1, y2 - y1]
+ valid_objs.append(obj)
+ objs = valid_objs
+
+ bbox_id = 0
+ rec = []
+ for obj in objs:
+ if 'keypoints' not in obj:
+ continue
+ if max(obj['keypoints']) == 0:
+ continue
+ if 'num_keypoints' in obj and obj['num_keypoints'] == 0:
+ continue
+
+ category_id = obj['category_id']
+ # the number of keypoint for this specific category
+ cat_kpt_num = int(len(obj['keypoints']) / 3)
+ if self.max_kpt_num is None:
+ kpt_num = cat_kpt_num
+ else:
+ kpt_num = self.max_kpt_num
+
+ joints_3d = np.zeros((kpt_num, 3), dtype=np.float32)
+ joints_3d_visible = np.zeros((kpt_num, 3), dtype=np.float32)
+
+ keypoints = np.array(obj['keypoints']).reshape(-1, 3)
+ joints_3d[:cat_kpt_num, :2] = keypoints[:, :2]
+ joints_3d_visible[:cat_kpt_num, :2] = np.minimum(
+ 1, keypoints[:, 2:3])
+
+ center, scale = self._xywh2cs(*obj['clean_bbox'][:4])
+
+ image_file = os.path.join(self.img_prefix, self.id2name[img_id])
+ if os.path.exists(image_file):
+ self.cat2obj[category_id].append(self.obj_id)
+
+ rec.append({
+ 'image_file':
+ image_file,
+ 'center':
+ center,
+ 'scale':
+ scale,
+ 'rotation':
+ 0,
+ 'bbox':
+ obj['clean_bbox'][:4],
+ 'bbox_score':
+ 1,
+ 'joints_3d':
+ joints_3d,
+ 'joints_3d_visible':
+ joints_3d_visible,
+ 'category_id':
+ category_id,
+ 'cat_kpt_num':
+ cat_kpt_num,
+ 'bbox_id':
+ self.obj_id,
+ 'skeleton':
+ self.coco.cats[obj['category_id']]['skeleton'],
+ })
+ bbox_id = bbox_id + 1
+ self.obj_id += 1
+
+ return rec
+
+ def _xywh2cs(self, x, y, w, h):
+ """This encodes bbox(x,y,w,w) into (center, scale)
+
+ Args:
+ x, y, w, h
+
+ Returns:
+ tuple: A tuple containing center and scale.
+
+ - center (np.ndarray[float32](2,)): center of the bbox (x, y).
+ - scale (np.ndarray[float32](2,)): scale of the bbox w & h.
+ """
+ aspect_ratio = self.ann_info['image_size'][0] / self.ann_info[
+ 'image_size'][1]
+ center = np.array([x + w * 0.5, y + h * 0.5], dtype=np.float32)
+ #
+ # if (not self.test_mode) and np.random.rand() < 0.3:
+ # center += 0.4 * (np.random.rand(2) - 0.5) * [w, h]
+
+ if w > aspect_ratio * h:
+ h = w * 1.0 / aspect_ratio
+ elif w < aspect_ratio * h:
+ w = h * aspect_ratio
+
+ # pixel std is 200.0
+ scale = np.array([w / 200.0, h / 200.0], dtype=np.float32)
+ # padding to include proper amount of context
+ scale = scale * 1.25
+
+ return center, scale
+
+ def evaluate(self, outputs, res_folder, metric='PCK', **kwargs):
+ """Evaluate interhand2d keypoint results. The pose prediction results
+ will be saved in `${res_folder}/result_keypoints.json`.
+
+ Note:
+ batch_size: N
+ num_keypoints: K
+ heatmap height: H
+ heatmap width: W
+
+ Args:
+ outputs (list(preds, boxes, image_path, output_heatmap))
+ :preds (np.ndarray[N,K,3]): The first two dimensions are
+ coordinates, score is the third dimension of the array.
+ :boxes (np.ndarray[N,6]): [center[0], center[1], scale[0]
+ , scale[1],area, score]
+ :image_paths (list[str]): For example, ['C', 'a', 'p', 't',
+ 'u', 'r', 'e', '1', '2', '/', '0', '3', '9', '0', '_',
+ 'd', 'h', '_', 't', 'o', 'u', 'c', 'h', 'R', 'O', 'M',
+ '/', 'c', 'a', 'm', '4', '1', '0', '2', '0', '9', '/',
+ 'i', 'm', 'a', 'g', 'e', '6', '2', '4', '3', '4', '.',
+ 'j', 'p', 'g']
+ :output_heatmap (np.ndarray[N, K, H, W]): model outputs.
+
+ res_folder (str): Path of directory to save the results.
+ metric (str | list[str]): Metric to be performed.
+ Options: 'PCK', 'AUC', 'EPE'.
+
+ Returns:
+ dict: Evaluation results for evaluation metric.
+ """
+ metrics = metric if isinstance(metric, list) else [metric]
+ allowed_metrics = ['PCK', 'AUC', 'EPE', 'NME']
+ for metric in metrics:
+ if metric not in allowed_metrics:
+ raise KeyError(f'metric {metric} is not supported')
+
+ res_file = os.path.join(res_folder, 'result_keypoints.json')
+
+ kpts = []
+ for output in outputs:
+ preds = output['preds']
+ boxes = output['boxes']
+ image_paths = output['image_paths']
+ bbox_ids = output['bbox_ids']
+
+ batch_size = len(image_paths)
+ for i in range(batch_size):
+ image_id = self.name2id[image_paths[i][len(self.img_prefix):]]
+
+ kpts.append({
+ 'keypoints': preds[i].tolist(),
+ 'center': boxes[i][0:2].tolist(),
+ 'scale': boxes[i][2:4].tolist(),
+ 'area': float(boxes[i][4]),
+ 'score': float(boxes[i][5]),
+ 'image_id': image_id,
+ 'bbox_id': bbox_ids[i]
+ })
+ kpts = self._sort_and_unique_bboxes(kpts)
+
+ self._write_keypoint_results(kpts, res_file)
+ info_str = self._report_metric(res_file, metrics)
+ name_value = OrderedDict(info_str)
+
+ return name_value
diff --git a/projects/pose_anything/datasets/pipelines/__init__.py b/projects/pose_anything/datasets/pipelines/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..762593d15bcd56796eb4732bbccceae0648ac40e
--- /dev/null
+++ b/projects/pose_anything/datasets/pipelines/__init__.py
@@ -0,0 +1,3 @@
+from .top_down_transform import TopDownGenerateTargetFewShot
+
+__all__ = ['TopDownGenerateTargetFewShot']
diff --git a/projects/pose_anything/datasets/pipelines/post_transforms.py b/projects/pose_anything/datasets/pipelines/post_transforms.py
new file mode 100644
index 0000000000000000000000000000000000000000..e69de29bb2d1d6434b8b29ae775ad8c2e48c5391
diff --git a/projects/pose_anything/datasets/pipelines/top_down_transform.py b/projects/pose_anything/datasets/pipelines/top_down_transform.py
new file mode 100644
index 0000000000000000000000000000000000000000..a0c08393070c26575405f4c5cfec010d14e63924
--- /dev/null
+++ b/projects/pose_anything/datasets/pipelines/top_down_transform.py
@@ -0,0 +1,317 @@
+import numpy as np
+
+
+class TopDownGenerateTargetFewShot:
+ """Generate the target heatmap.
+
+ Required keys: 'joints_3d', 'joints_3d_visible', 'ann_info'.
+ Modified keys: 'target', and 'target_weight'.
+
+ Args:
+ sigma: Sigma of heatmap gaussian for 'MSRA' approach.
+ kernel: Kernel of heatmap gaussian for 'Megvii' approach.
+ encoding (str): Approach to generate target heatmaps.
+ Currently supported approaches: 'MSRA', 'Megvii', 'UDP'.
+ Default:'MSRA'
+
+ unbiased_encoding (bool): Option to use unbiased
+ encoding methods.
+ Paper ref: Zhang et al. Distribution-Aware Coordinate
+ Representation for Human Pose Estimation (CVPR 2020).
+ keypoint_pose_distance: Keypoint pose distance for UDP.
+ Paper ref: Huang et al. The Devil is in the Details: Delving into
+ Unbiased Data Processing for Human Pose Estimation (CVPR 2020).
+ target_type (str): supported targets: 'GaussianHeatMap',
+ 'CombinedTarget'. Default:'GaussianHeatMap'
+ CombinedTarget: The combination of classification target
+ (response map) and regression target (offset map).
+ Paper ref: Huang et al. The Devil is in the Details: Delving into
+ Unbiased Data Processing for Human Pose Estimation (CVPR 2020).
+ """
+
+ def __init__(self,
+ sigma=2,
+ kernel=(11, 11),
+ valid_radius_factor=0.0546875,
+ target_type='GaussianHeatMap',
+ encoding='MSRA',
+ unbiased_encoding=False):
+ self.sigma = sigma
+ self.unbiased_encoding = unbiased_encoding
+ self.kernel = kernel
+ self.valid_radius_factor = valid_radius_factor
+ self.target_type = target_type
+ self.encoding = encoding
+
+ def _msra_generate_target(self, cfg, joints_3d, joints_3d_visible, sigma):
+ """Generate the target heatmap via "MSRA" approach.
+
+ Args:
+ cfg (dict): data config
+ joints_3d: np.ndarray ([num_joints, 3])
+ joints_3d_visible: np.ndarray ([num_joints, 3])
+ sigma: Sigma of heatmap gaussian
+ Returns:
+ tuple: A tuple containing targets.
+
+ - target: Target heatmaps.
+ - target_weight: (1: visible, 0: invisible)
+ """
+ num_joints = len(joints_3d)
+ image_size = cfg['image_size']
+ W, H = cfg['heatmap_size']
+ joint_weights = cfg['joint_weights']
+ use_different_joint_weights = cfg['use_different_joint_weights']
+ assert not use_different_joint_weights
+
+ target_weight = np.zeros((num_joints, 1), dtype=np.float32)
+ target = np.zeros((num_joints, H, W), dtype=np.float32)
+
+ # 3-sigma rule
+ tmp_size = sigma * 3
+
+ if self.unbiased_encoding:
+ for joint_id in range(num_joints):
+ target_weight[joint_id] = joints_3d_visible[joint_id, 0]
+
+ feat_stride = image_size / [W, H]
+ mu_x = joints_3d[joint_id][0] / feat_stride[0]
+ mu_y = joints_3d[joint_id][1] / feat_stride[1]
+ # Check that any part of the gaussian is in-bounds
+ ul = [mu_x - tmp_size, mu_y - tmp_size]
+ br = [mu_x + tmp_size + 1, mu_y + tmp_size + 1]
+ if ul[0] >= W or ul[1] >= H or br[0] < 0 or br[1] < 0:
+ target_weight[joint_id] = 0
+
+ if target_weight[joint_id] == 0:
+ continue
+
+ x = np.arange(0, W, 1, np.float32)
+ y = np.arange(0, H, 1, np.float32)
+ y = y[:, None]
+
+ if target_weight[joint_id] > 0.5:
+ target[joint_id] = np.exp(-((x - mu_x)**2 +
+ (y - mu_y)**2) /
+ (2 * sigma**2))
+ else:
+ for joint_id in range(num_joints):
+ target_weight[joint_id] = joints_3d_visible[joint_id, 0]
+
+ feat_stride = image_size / [W, H]
+ mu_x = int(joints_3d[joint_id][0] / feat_stride[0] + 0.5)
+ mu_y = int(joints_3d[joint_id][1] / feat_stride[1] + 0.5)
+ # Check that any part of the gaussian is in-bounds
+ ul = [int(mu_x - tmp_size), int(mu_y - tmp_size)]
+ br = [int(mu_x + tmp_size + 1), int(mu_y + tmp_size + 1)]
+ if ul[0] >= W or ul[1] >= H or br[0] < 0 or br[1] < 0:
+ target_weight[joint_id] = 0
+
+ if target_weight[joint_id] > 0.5:
+ size = 2 * tmp_size + 1
+ x = np.arange(0, size, 1, np.float32)
+ y = x[:, None]
+ x0 = y0 = size // 2
+ # The gaussian is not normalized,
+ # we want the center value to equal 1
+ g = np.exp(-((x - x0)**2 + (y - y0)**2) / (2 * sigma**2))
+
+ # Usable gaussian range
+ g_x = max(0, -ul[0]), min(br[0], W) - ul[0]
+ g_y = max(0, -ul[1]), min(br[1], H) - ul[1]
+ # Image range
+ img_x = max(0, ul[0]), min(br[0], W)
+ img_y = max(0, ul[1]), min(br[1], H)
+
+ target[joint_id][img_y[0]:img_y[1], img_x[0]:img_x[1]] = \
+ g[g_y[0]:g_y[1], g_x[0]:g_x[1]]
+
+ if use_different_joint_weights:
+ target_weight = np.multiply(target_weight, joint_weights)
+
+ return target, target_weight
+
+ def _udp_generate_target(self, cfg, joints_3d, joints_3d_visible, factor,
+ target_type):
+ """Generate the target heatmap via 'UDP' approach. Paper ref: Huang et
+ al. The Devil is in the Details: Delving into Unbiased Data Processing
+ for Human Pose Estimation (CVPR 2020).
+
+ Note:
+ num keypoints: K
+ heatmap height: H
+ heatmap width: W
+ num target channels: C
+ C = K if target_type=='GaussianHeatMap'
+ C = 3*K if target_type=='CombinedTarget'
+
+ Args:
+ cfg (dict): data config
+ joints_3d (np.ndarray[K, 3]): Annotated keypoints.
+ joints_3d_visible (np.ndarray[K, 3]): Visibility of keypoints.
+ factor (float): kernel factor for GaussianHeatMap target or
+ valid radius factor for CombinedTarget.
+ target_type (str): 'GaussianHeatMap' or 'CombinedTarget'.
+ GaussianHeatMap: Heatmap target with gaussian distribution.
+ CombinedTarget: The combination of classification target
+ (response map) and regression target (offset map).
+
+ Returns:
+ tuple: A tuple containing targets.
+
+ - target (np.ndarray[C, H, W]): Target heatmaps.
+ - target_weight (np.ndarray[K, 1]): (1: visible, 0: invisible)
+ """
+ num_joints = len(joints_3d)
+ image_size = cfg['image_size']
+ heatmap_size = cfg['heatmap_size']
+ joint_weights = cfg['joint_weights']
+ use_different_joint_weights = cfg['use_different_joint_weights']
+ assert not use_different_joint_weights
+
+ target_weight = np.ones((num_joints, 1), dtype=np.float32)
+ target_weight[:, 0] = joints_3d_visible[:, 0]
+
+ assert target_type in ['GaussianHeatMap', 'CombinedTarget']
+
+ if target_type == 'GaussianHeatMap':
+ target = np.zeros((num_joints, heatmap_size[1], heatmap_size[0]),
+ dtype=np.float32)
+
+ tmp_size = factor * 3
+
+ # prepare for gaussian
+ size = 2 * tmp_size + 1
+ x = np.arange(0, size, 1, np.float32)
+ y = x[:, None]
+
+ for joint_id in range(num_joints):
+ feat_stride = (image_size - 1.0) / (heatmap_size - 1.0)
+ mu_x = int(joints_3d[joint_id][0] / feat_stride[0] + 0.5)
+ mu_y = int(joints_3d[joint_id][1] / feat_stride[1] + 0.5)
+ # Check that any part of the gaussian is in-bounds
+ ul = [int(mu_x - tmp_size), int(mu_y - tmp_size)]
+ br = [int(mu_x + tmp_size + 1), int(mu_y + tmp_size + 1)]
+ if ul[0] >= heatmap_size[0] or ul[1] >= heatmap_size[1] \
+ or br[0] < 0 or br[1] < 0:
+ # If not, just return the image as is
+ target_weight[joint_id] = 0
+ continue
+
+ # # Generate gaussian
+ mu_x_ac = joints_3d[joint_id][0] / feat_stride[0]
+ mu_y_ac = joints_3d[joint_id][1] / feat_stride[1]
+ x0 = y0 = size // 2
+ x0 += mu_x_ac - mu_x
+ y0 += mu_y_ac - mu_y
+ g = np.exp(-((x - x0)**2 + (y - y0)**2) / (2 * factor**2))
+
+ # Usable gaussian range
+ g_x = max(0, -ul[0]), min(br[0], heatmap_size[0]) - ul[0]
+ g_y = max(0, -ul[1]), min(br[1], heatmap_size[1]) - ul[1]
+ # Image range
+ img_x = max(0, ul[0]), min(br[0], heatmap_size[0])
+ img_y = max(0, ul[1]), min(br[1], heatmap_size[1])
+
+ v = target_weight[joint_id]
+ if v > 0.5:
+ target[joint_id][img_y[0]:img_y[1], img_x[0]:img_x[1]] = \
+ g[g_y[0]:g_y[1], g_x[0]:g_x[1]]
+ elif target_type == 'CombinedTarget':
+ target = np.zeros(
+ (num_joints, 3, heatmap_size[1] * heatmap_size[0]),
+ dtype=np.float32)
+ feat_width = heatmap_size[0]
+ feat_height = heatmap_size[1]
+ feat_x_int = np.arange(0, feat_width)
+ feat_y_int = np.arange(0, feat_height)
+ feat_x_int, feat_y_int = np.meshgrid(feat_x_int, feat_y_int)
+ feat_x_int = feat_x_int.flatten()
+ feat_y_int = feat_y_int.flatten()
+ # Calculate the radius of the positive area in classification
+ # heatmap.
+ valid_radius = factor * heatmap_size[1]
+ feat_stride = (image_size - 1.0) / (heatmap_size - 1.0)
+ for joint_id in range(num_joints):
+ mu_x = joints_3d[joint_id][0] / feat_stride[0]
+ mu_y = joints_3d[joint_id][1] / feat_stride[1]
+ x_offset = (mu_x - feat_x_int) / valid_radius
+ y_offset = (mu_y - feat_y_int) / valid_radius
+ dis = x_offset**2 + y_offset**2
+ keep_pos = np.where(dis <= 1)[0]
+ v = target_weight[joint_id]
+ if v > 0.5:
+ target[joint_id, 0, keep_pos] = 1
+ target[joint_id, 1, keep_pos] = x_offset[keep_pos]
+ target[joint_id, 2, keep_pos] = y_offset[keep_pos]
+ target = target.reshape(num_joints * 3, heatmap_size[1],
+ heatmap_size[0])
+
+ if use_different_joint_weights:
+ target_weight = np.multiply(target_weight, joint_weights)
+
+ return target, target_weight
+
+ def __call__(self, results):
+ """Generate the target heatmap."""
+ joints_3d = results['joints_3d']
+ joints_3d_visible = results['joints_3d_visible']
+
+ assert self.encoding in ['MSRA', 'UDP']
+
+ if self.encoding == 'MSRA':
+ if isinstance(self.sigma, list):
+ num_sigmas = len(self.sigma)
+ cfg = results['ann_info']
+ num_joints = len(joints_3d)
+ heatmap_size = cfg['heatmap_size']
+
+ target = np.empty(
+ (0, num_joints, heatmap_size[1], heatmap_size[0]),
+ dtype=np.float32)
+ target_weight = np.empty((0, num_joints, 1), dtype=np.float32)
+ for i in range(num_sigmas):
+ target_i, target_weight_i = self._msra_generate_target(
+ cfg, joints_3d, joints_3d_visible, self.sigma[i])
+ target = np.concatenate([target, target_i[None]], axis=0)
+ target_weight = np.concatenate(
+ [target_weight, target_weight_i[None]], axis=0)
+ else:
+ target, target_weight = self._msra_generate_target(
+ results['ann_info'], joints_3d, joints_3d_visible,
+ self.sigma)
+ elif self.encoding == 'UDP':
+ if self.target_type == 'CombinedTarget':
+ factors = self.valid_radius_factor
+ channel_factor = 3
+ elif self.target_type == 'GaussianHeatMap':
+ factors = self.sigma
+ channel_factor = 1
+ if isinstance(factors, list):
+ num_factors = len(factors)
+ cfg = results['ann_info']
+ num_joints = len(joints_3d)
+ W, H = cfg['heatmap_size']
+
+ target = np.empty((0, channel_factor * num_joints, H, W),
+ dtype=np.float32)
+ target_weight = np.empty((0, num_joints, 1), dtype=np.float32)
+ for i in range(num_factors):
+ target_i, target_weight_i = self._udp_generate_target(
+ cfg, joints_3d, joints_3d_visible, factors[i],
+ self.target_type)
+ target = np.concatenate([target, target_i[None]], axis=0)
+ target_weight = np.concatenate(
+ [target_weight, target_weight_i[None]], axis=0)
+ else:
+ target, target_weight = self._udp_generate_target(
+ results['ann_info'], joints_3d, joints_3d_visible, factors,
+ self.target_type)
+ else:
+ raise ValueError(
+ f'Encoding approach {self.encoding} is not supported!')
+
+ results['target'] = target
+ results['target_weight'] = target_weight
+
+ return results
diff --git a/projects/pose_anything/demo.py b/projects/pose_anything/demo.py
new file mode 100644
index 0000000000000000000000000000000000000000..64490a163b0037906e373bb152ae1c124f78751f
--- /dev/null
+++ b/projects/pose_anything/demo.py
@@ -0,0 +1,291 @@
+import argparse
+import copy
+import os
+import random
+
+import cv2
+import numpy as np
+import torch
+import torchvision.transforms.functional as F
+from datasets.pipelines import TopDownGenerateTargetFewShot
+from mmcv.cnn import fuse_conv_bn
+from mmengine.config import Config, DictAction
+from mmengine.runner import load_checkpoint
+from torchvision import transforms
+
+from mmpose.models import build_pose_estimator
+from tools.visualization import COLORS, plot_results
+
+
+class ResizePad:
+
+ def __init__(self, w=256, h=256):
+ self.w = w
+ self.h = h
+
+ def __call__(self, image):
+ _, w_1, h_1 = image.shape
+ ratio_1 = w_1 / h_1
+ # check if the original and final aspect ratios are the same within a
+ # margin
+ if round(ratio_1, 2) != 1:
+ # padding to preserve aspect ratio
+ if ratio_1 > 1: # Make the image higher
+ hp = int(w_1 - h_1)
+ hp = hp // 2
+ image = F.pad(image, (hp, 0, hp, 0), 0, 'constant')
+ return F.resize(image, [self.h, self.w])
+ else:
+ wp = int(h_1 - w_1)
+ wp = wp // 2
+ image = F.pad(image, (0, wp, 0, wp), 0, 'constant')
+ return F.resize(image, [self.h, self.w])
+ else:
+ return F.resize(image, [self.h, self.w])
+
+
+def parse_args():
+ parser = argparse.ArgumentParser(description='Pose Anything Demo')
+ parser.add_argument('--support', help='Image file')
+ parser.add_argument('--query', help='Image file')
+ parser.add_argument(
+ '--config', default='configs/demo.py', help='test config file path')
+ parser.add_argument(
+ '--checkpoint', default='pretrained', help='checkpoint file')
+ parser.add_argument('--outdir', default='output', help='checkpoint file')
+
+ parser.add_argument(
+ '--fuse-conv-bn',
+ action='store_true',
+ help='Whether to fuse conv and bn, this will slightly increase'
+ 'the inference speed')
+ parser.add_argument(
+ '--cfg-options',
+ nargs='+',
+ action=DictAction,
+ default={},
+ help='override some settings in the used config, the key-value pair '
+ 'in xxx=yyy format will be merged into config file. For example, '
+ "'--cfg-options model.backbone.depth=18 "
+ "model.backbone.with_cp=True'")
+ args = parser.parse_args()
+ return args
+
+
+def merge_configs(cfg1, cfg2):
+ # Merge cfg2 into cfg1
+ # Overwrite cfg1 if repeated, ignore if value is None.
+ cfg1 = {} if cfg1 is None else cfg1.copy()
+ cfg2 = {} if cfg2 is None else cfg2
+ for k, v in cfg2.items():
+ if v:
+ cfg1[k] = v
+ return cfg1
+
+
+def main():
+ random.seed(0)
+ np.random.seed(0)
+ torch.manual_seed(0)
+
+ args = parse_args()
+ cfg = Config.fromfile(args.config)
+
+ if args.cfg_options is not None:
+ cfg.merge_from_dict(args.cfg_options)
+ # set cudnn_benchmark
+ if cfg.get('cudnn_benchmark', False):
+ torch.backends.cudnn.benchmark = True
+ cfg.data.test.test_mode = True
+
+ os.makedirs(args.outdir, exist_ok=True)
+
+ # Load data
+ support_img = cv2.imread(args.support)
+ query_img = cv2.imread(args.query)
+ if support_img is None or query_img is None:
+ raise ValueError('Fail to read images')
+
+ preprocess = transforms.Compose([
+ transforms.ToTensor(),
+ ResizePad(cfg.model.encoder_config.img_size,
+ cfg.model.encoder_config.img_size)
+ ])
+
+ # frame = copy.deepcopy(support_img)
+ padded_support_img = preprocess(support_img).cpu().numpy().transpose(
+ 1, 2, 0) * 255
+ frame = copy.deepcopy(padded_support_img.astype(np.uint8).copy())
+ kp_src = []
+ skeleton = []
+ count = 0
+ prev_pt = None
+ prev_pt_idx = None
+ color_idx = 0
+
+ def selectKP(event, x, y, flags, param):
+ nonlocal kp_src, frame
+ # if we are in points selection mode, the mouse was clicked,
+ # list of points with the (x, y) location of the click
+ # and draw the circle
+
+ if event == cv2.EVENT_LBUTTONDOWN:
+ kp_src.append((x, y))
+ cv2.circle(frame, (x, y), 2, (0, 0, 255), 1)
+ cv2.imshow('Source', frame)
+
+ if event == cv2.EVENT_RBUTTONDOWN:
+ kp_src = []
+ frame = copy.deepcopy(support_img)
+ cv2.imshow('Source', frame)
+
+ def draw_line(event, x, y, flags, param):
+ nonlocal skeleton, kp_src, frame, count, prev_pt, prev_pt_idx, \
+ marked_frame, color_idx
+ if event == cv2.EVENT_LBUTTONDOWN:
+ closest_point = min(
+ kp_src, key=lambda p: (p[0] - x)**2 + (p[1] - y)**2)
+ closest_point_index = kp_src.index(closest_point)
+ if color_idx < len(COLORS):
+ c = COLORS[color_idx]
+ else:
+ c = random.choices(range(256), k=3)
+
+ cv2.circle(frame, closest_point, 2, c, 1)
+ if count == 0:
+ prev_pt = closest_point
+ prev_pt_idx = closest_point_index
+ count = count + 1
+ cv2.imshow('Source', frame)
+ else:
+ cv2.line(frame, prev_pt, closest_point, c, 2)
+ cv2.imshow('Source', frame)
+ count = 0
+ skeleton.append((prev_pt_idx, closest_point_index))
+ color_idx = color_idx + 1
+ elif event == cv2.EVENT_RBUTTONDOWN:
+ frame = copy.deepcopy(marked_frame)
+ cv2.imshow('Source', frame)
+ count = 0
+ color_idx = 0
+ skeleton = []
+ prev_pt = None
+
+ cv2.namedWindow('Source', cv2.WINDOW_NORMAL)
+ cv2.resizeWindow('Source', 800, 600)
+ cv2.setMouseCallback('Source', selectKP)
+ cv2.imshow('Source', frame)
+
+ # keep looping until points have been selected
+ print('Press any key when finished marking the points!! ')
+ while True:
+ if cv2.waitKey(1) > 0:
+ break
+
+ marked_frame = copy.deepcopy(frame)
+ cv2.setMouseCallback('Source', draw_line)
+ print('Press any key when finished creating skeleton!!')
+ while True:
+ if cv2.waitKey(1) > 0:
+ break
+
+ cv2.destroyAllWindows()
+ kp_src = torch.tensor(kp_src).float()
+ preprocess = transforms.Compose([
+ transforms.ToTensor(),
+ transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225)),
+ ResizePad(cfg.model.encoder_config.img_size,
+ cfg.model.encoder_config.img_size)
+ ])
+
+ if len(skeleton) == 0:
+ skeleton = [(0, 0)]
+
+ support_img = preprocess(support_img).flip(0)[None]
+ query_img = preprocess(query_img).flip(0)[None]
+ # Create heatmap from keypoints
+ genHeatMap = TopDownGenerateTargetFewShot()
+ data_cfg = cfg.data_cfg
+ data_cfg['image_size'] = np.array(
+ [cfg.model.encoder_config.img_size, cfg.model.encoder_config.img_size])
+ data_cfg['joint_weights'] = None
+ data_cfg['use_different_joint_weights'] = False
+ kp_src_3d = torch.cat((kp_src, torch.zeros(kp_src.shape[0], 1)), dim=-1)
+ kp_src_3d_weight = torch.cat(
+ (torch.ones_like(kp_src), torch.zeros(kp_src.shape[0], 1)), dim=-1)
+ target_s, target_weight_s = genHeatMap._msra_generate_target(
+ data_cfg, kp_src_3d, kp_src_3d_weight, sigma=2)
+ target_s = torch.tensor(target_s).float()[None]
+ target_weight_s = torch.tensor(target_weight_s).float()[None]
+
+ data = {
+ 'img_s': [support_img],
+ 'img_q':
+ query_img,
+ 'target_s': [target_s],
+ 'target_weight_s': [target_weight_s],
+ 'target_q':
+ None,
+ 'target_weight_q':
+ None,
+ 'return_loss':
+ False,
+ 'img_metas': [{
+ 'sample_skeleton': [skeleton],
+ 'query_skeleton':
+ skeleton,
+ 'sample_joints_3d': [kp_src_3d],
+ 'query_joints_3d':
+ kp_src_3d,
+ 'sample_center': [kp_src.mean(dim=0)],
+ 'query_center':
+ kp_src.mean(dim=0),
+ 'sample_scale': [kp_src.max(dim=0)[0] - kp_src.min(dim=0)[0]],
+ 'query_scale':
+ kp_src.max(dim=0)[0] - kp_src.min(dim=0)[0],
+ 'sample_rotation': [0],
+ 'query_rotation':
+ 0,
+ 'sample_bbox_score': [1],
+ 'query_bbox_score':
+ 1,
+ 'query_image_file':
+ '',
+ 'sample_image_file': [''],
+ }]
+ }
+
+ # Load model
+ model = build_pose_estimator(cfg.model)
+ load_checkpoint(model, args.checkpoint, map_location='cpu')
+ if args.fuse_conv_bn:
+ model = fuse_conv_bn(model)
+ model.eval()
+
+ with torch.no_grad():
+ outputs = model(**data)
+
+ # visualize results
+ vis_s_weight = target_weight_s[0]
+ vis_q_weight = target_weight_s[0]
+ vis_s_image = support_img[0].detach().cpu().numpy().transpose(1, 2, 0)
+ vis_q_image = query_img[0].detach().cpu().numpy().transpose(1, 2, 0)
+ support_kp = kp_src_3d
+
+ plot_results(
+ vis_s_image,
+ vis_q_image,
+ support_kp,
+ vis_s_weight,
+ None,
+ vis_q_weight,
+ skeleton,
+ None,
+ torch.tensor(outputs['points']).squeeze(0),
+ out_dir=args.outdir)
+
+ print('Output saved to output dir: {}'.format(args.outdir))
+
+
+if __name__ == '__main__':
+ main()
diff --git a/projects/pose_anything/models/__init__.py b/projects/pose_anything/models/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..4c2fedaea28fef9ca046e1c2b03dea5c9261c6bf
--- /dev/null
+++ b/projects/pose_anything/models/__init__.py
@@ -0,0 +1,4 @@
+from .backbones import * # noqa
+from .detectors import * # noqa
+from .keypoint_heads import * # noqa
+from .utils import * # noqa
diff --git a/projects/pose_anything/models/backbones/__init__.py b/projects/pose_anything/models/backbones/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..c23ac1d15ce8a46673267b28d0c1cc25c8757cb8
--- /dev/null
+++ b/projects/pose_anything/models/backbones/__init__.py
@@ -0,0 +1 @@
+from .swin_transformer_v2 import SwinTransformerV2 # noqa
diff --git a/projects/pose_anything/models/backbones/simmim.py b/projects/pose_anything/models/backbones/simmim.py
new file mode 100644
index 0000000000000000000000000000000000000000..189011891a8796ba637dbcd369d04bb2e12ba932
--- /dev/null
+++ b/projects/pose_anything/models/backbones/simmim.py
@@ -0,0 +1,235 @@
+# --------------------------------------------------------
+# SimMIM
+# Copyright (c) 2021 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Zhenda Xie
+# --------------------------------------------------------
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from timm.models.layers import trunc_normal_
+
+from .swin_transformer import SwinTransformer
+from .swin_transformer_v2 import SwinTransformerV2
+
+
+def norm_targets(targets, patch_size):
+ assert patch_size % 2 == 1
+
+ targets_ = targets
+ targets_count = torch.ones_like(targets)
+
+ targets_square = targets**2.
+
+ targets_mean = F.avg_pool2d(
+ targets,
+ kernel_size=patch_size,
+ stride=1,
+ padding=patch_size // 2,
+ count_include_pad=False)
+ targets_square_mean = F.avg_pool2d(
+ targets_square,
+ kernel_size=patch_size,
+ stride=1,
+ padding=patch_size // 2,
+ count_include_pad=False)
+ targets_count = F.avg_pool2d(
+ targets_count,
+ kernel_size=patch_size,
+ stride=1,
+ padding=patch_size // 2,
+ count_include_pad=True) * (
+ patch_size**2)
+
+ targets_var = (targets_square_mean - targets_mean**2.) * (
+ targets_count / (targets_count - 1))
+ targets_var = torch.clamp(targets_var, min=0.)
+
+ targets_ = (targets_ - targets_mean) / (targets_var + 1.e-6)**0.5
+
+ return targets_
+
+
+class SwinTransformerForSimMIM(SwinTransformer):
+
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
+
+ assert self.num_classes == 0
+
+ self.mask_token = nn.Parameter(torch.zeros(1, 1, self.embed_dim))
+ trunc_normal_(self.mask_token, mean=0., std=.02)
+
+ def forward(self, x, mask):
+ x = self.patch_embed(x)
+
+ assert mask is not None
+ B, L, _ = x.shape
+
+ mask_tokens = self.mask_token.expand(B, L, -1)
+ w = mask.flatten(1).unsqueeze(-1).type_as(mask_tokens)
+ x = x * (1. - w) + mask_tokens * w
+
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+
+ for layer in self.layers:
+ x = layer(x)
+ x = self.norm(x)
+
+ x = x.transpose(1, 2)
+ B, C, L = x.shape
+ H = W = int(L**0.5)
+ x = x.reshape(B, C, H, W)
+ return x
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return super().no_weight_decay() | {'mask_token'}
+
+
+class SwinTransformerV2ForSimMIM(SwinTransformerV2):
+
+ def __init__(self, **kwargs):
+ super().__init__(**kwargs)
+
+ assert self.num_classes == 0
+
+ self.mask_token = nn.Parameter(torch.zeros(1, 1, self.embed_dim))
+ trunc_normal_(self.mask_token, mean=0., std=.02)
+
+ def forward(self, x, mask):
+ x = self.patch_embed(x)
+
+ assert mask is not None
+ B, L, _ = x.shape
+
+ mask_tokens = self.mask_token.expand(B, L, -1)
+ w = mask.flatten(1).unsqueeze(-1).type_as(mask_tokens)
+ x = x * (1. - w) + mask_tokens * w
+
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+
+ for layer in self.layers:
+ x = layer(x)
+ x = self.norm(x)
+
+ x = x.transpose(1, 2)
+ B, C, L = x.shape
+ H = W = int(L**0.5)
+ x = x.reshape(B, C, H, W)
+ return x
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return super().no_weight_decay() | {'mask_token'}
+
+
+class SimMIM(nn.Module):
+
+ def __init__(self, config, encoder, encoder_stride, in_chans, patch_size):
+ super().__init__()
+ self.config = config
+ self.encoder = encoder
+ self.encoder_stride = encoder_stride
+
+ self.decoder = nn.Sequential(
+ nn.Conv2d(
+ in_channels=self.encoder.num_features,
+ out_channels=self.encoder_stride**2 * 3,
+ kernel_size=1),
+ nn.PixelShuffle(self.encoder_stride),
+ )
+
+ self.in_chans = in_chans
+ self.patch_size = patch_size
+
+ def forward(self, x, mask):
+ z = self.encoder(x, mask)
+ x_rec = self.decoder(z)
+
+ mask = mask.repeat_interleave(self.patch_size, 1).repeat_interleave(
+ self.patch_size, 2).unsqueeze(1).contiguous()
+
+ # norm target as prompted
+ if self.config.NORM_TARGET.ENABLE:
+ x = norm_targets(x, self.config.NORM_TARGET.PATCH_SIZE)
+
+ loss_recon = F.l1_loss(x, x_rec, reduction='none')
+ loss = (loss_recon * mask).sum() / (mask.sum() + 1e-5) / self.in_chans
+ return loss
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ if hasattr(self.encoder, 'no_weight_decay'):
+ return {'encoder.' + i for i in self.encoder.no_weight_decay()}
+ return {}
+
+ @torch.jit.ignore
+ def no_weight_decay_keywords(self):
+ if hasattr(self.encoder, 'no_weight_decay_keywords'):
+ return {
+ 'encoder.' + i
+ for i in self.encoder.no_weight_decay_keywords()
+ }
+ return {}
+
+
+def build_simmim(config):
+ model_type = config.MODEL.TYPE
+ if model_type == 'swin':
+ encoder = SwinTransformerForSimMIM(
+ img_size=config.DATA.IMG_SIZE,
+ patch_size=config.MODEL.SWIN.PATCH_SIZE,
+ in_chans=config.MODEL.SWIN.IN_CHANS,
+ num_classes=0,
+ embed_dim=config.MODEL.SWIN.EMBED_DIM,
+ depths=config.MODEL.SWIN.DEPTHS,
+ num_heads=config.MODEL.SWIN.NUM_HEADS,
+ window_size=config.MODEL.SWIN.WINDOW_SIZE,
+ mlp_ratio=config.MODEL.SWIN.MLP_RATIO,
+ qkv_bias=config.MODEL.SWIN.QKV_BIAS,
+ qk_scale=config.MODEL.SWIN.QK_SCALE,
+ drop_rate=config.MODEL.DROP_RATE,
+ drop_path_rate=config.MODEL.DROP_PATH_RATE,
+ ape=config.MODEL.SWIN.APE,
+ patch_norm=config.MODEL.SWIN.PATCH_NORM,
+ use_checkpoint=config.TRAIN.USE_CHECKPOINT)
+ encoder_stride = 32
+ in_chans = config.MODEL.SWIN.IN_CHANS
+ patch_size = config.MODEL.SWIN.PATCH_SIZE
+ elif model_type == 'swinv2':
+ encoder = SwinTransformerV2ForSimMIM(
+ img_size=config.DATA.IMG_SIZE,
+ patch_size=config.MODEL.SWINV2.PATCH_SIZE,
+ in_chans=config.MODEL.SWINV2.IN_CHANS,
+ num_classes=0,
+ embed_dim=config.MODEL.SWINV2.EMBED_DIM,
+ depths=config.MODEL.SWINV2.DEPTHS,
+ num_heads=config.MODEL.SWINV2.NUM_HEADS,
+ window_size=config.MODEL.SWINV2.WINDOW_SIZE,
+ mlp_ratio=config.MODEL.SWINV2.MLP_RATIO,
+ qkv_bias=config.MODEL.SWINV2.QKV_BIAS,
+ drop_rate=config.MODEL.DROP_RATE,
+ drop_path_rate=config.MODEL.DROP_PATH_RATE,
+ ape=config.MODEL.SWINV2.APE,
+ patch_norm=config.MODEL.SWINV2.PATCH_NORM,
+ use_checkpoint=config.TRAIN.USE_CHECKPOINT)
+ encoder_stride = 32
+ in_chans = config.MODEL.SWINV2.IN_CHANS
+ patch_size = config.MODEL.SWINV2.PATCH_SIZE
+ else:
+ raise NotImplementedError(f'Unknown pre-train model: {model_type}')
+
+ model = SimMIM(
+ config=config.MODEL.SIMMIM,
+ encoder=encoder,
+ encoder_stride=encoder_stride,
+ in_chans=in_chans,
+ patch_size=patch_size)
+
+ return model
diff --git a/projects/pose_anything/models/backbones/swin_mlp.py b/projects/pose_anything/models/backbones/swin_mlp.py
new file mode 100644
index 0000000000000000000000000000000000000000..0442c2fab75d6644e5006e6918adc2093c58a220
--- /dev/null
+++ b/projects/pose_anything/models/backbones/swin_mlp.py
@@ -0,0 +1,565 @@
+# --------------------------------------------------------
+# Swin Transformer
+# Copyright (c) 2021 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Ze Liu
+# --------------------------------------------------------
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.utils.checkpoint as checkpoint
+from timm.models.layers import DropPath, to_2tuple, trunc_normal_
+
+
+class Mlp(nn.Module):
+
+ def __init__(self,
+ in_features,
+ hidden_features=None,
+ out_features=None,
+ act_layer=nn.GELU,
+ drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition(x, window_size):
+ """
+ Args:
+ x: (B, H, W, C)
+ window_size (int): window size
+
+ Returns:
+ windows: (num_windows*B, window_size, window_size, C)
+ """
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size,
+ C)
+ windows = x.permute(0, 1, 3, 2, 4,
+ 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse(windows, window_size, H, W):
+ """
+ Args:
+ windows: (num_windows*B, window_size, window_size, C)
+ window_size (int): Window size
+ H (int): Height of image
+ W (int): Width of image
+
+ Returns:
+ x: (B, H, W, C)
+ """
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size,
+ window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class SwinMLPBlock(nn.Module):
+ r""" Swin MLP Block.
+
+ Args: dim (int): Number of input channels. input_resolution (tuple[int]):
+ Input resolution. num_heads (int): Number of attention heads. window_size
+ (int): Window size. shift_size (int): Shift size for SW-MSA. mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. drop (float, optional):
+ Dropout rate. Default: 0.0 drop_path (float, optional): Stochastic depth
+ rate. Default: 0.0 act_layer (nn.Module, optional): Activation layer.
+ Default: nn.GELU norm_layer (nn.Module, optional): Normalization layer.
+ Default: nn.LayerNorm
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ num_heads,
+ window_size=7,
+ shift_size=0,
+ mlp_ratio=4.,
+ drop=0.,
+ drop_path=0.,
+ act_layer=nn.GELU,
+ norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ if min(self.input_resolution) <= self.window_size:
+ # if window size is larger than input resolution, we don't
+ # partition windows
+ self.shift_size = 0
+ self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, ('shift_size must in '
+ '0-window_size')
+
+ self.padding = [
+ self.window_size - self.shift_size, self.shift_size,
+ self.window_size - self.shift_size, self.shift_size
+ ] # P_l,P_r,P_t,P_b
+
+ self.norm1 = norm_layer(dim)
+ # use group convolution to implement multi-head MLP
+ self.spatial_mlp = nn.Conv1d(
+ self.num_heads * self.window_size**2,
+ self.num_heads * self.window_size**2,
+ kernel_size=1,
+ groups=self.num_heads)
+
+ self.drop_path = DropPath(
+ drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(
+ in_features=dim,
+ hidden_features=mlp_hidden_dim,
+ act_layer=act_layer,
+ drop=drop)
+
+ def forward(self, x):
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # shift
+ if self.shift_size > 0:
+ P_l, P_r, P_t, P_b = self.padding
+ shifted_x = F.pad(x, [0, 0, P_l, P_r, P_t, P_b], 'constant', 0)
+ else:
+ shifted_x = x
+ _, _H, _W, _ = shifted_x.shape
+
+ # partition windows
+ x_windows = window_partition(
+ shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size,
+ C) # nW*B, window_size*window_size, C
+
+ # Window/Shifted-Window Spatial MLP
+ x_windows_heads = x_windows.view(-1,
+ self.window_size * self.window_size,
+ self.num_heads, C // self.num_heads)
+ x_windows_heads = x_windows_heads.transpose(
+ 1, 2) # nW*B, nH, window_size*window_size, C//nH
+ x_windows_heads = x_windows_heads.reshape(
+ -1, self.num_heads * self.window_size * self.window_size,
+ C // self.num_heads)
+ spatial_mlp_windows = self.spatial_mlp(
+ x_windows_heads) # nW*B, nH*window_size*window_size, C//nH
+ spatial_mlp_windows = spatial_mlp_windows.view(
+ -1, self.num_heads, self.window_size * self.window_size,
+ C // self.num_heads).transpose(1, 2)
+ spatial_mlp_windows = spatial_mlp_windows.reshape(
+ -1, self.window_size * self.window_size, C)
+
+ # merge windows
+ spatial_mlp_windows = spatial_mlp_windows.reshape(
+ -1, self.window_size, self.window_size, C)
+ shifted_x = window_reverse(spatial_mlp_windows, self.window_size, _H,
+ _W) # B H' W' C
+
+ # reverse shift
+ if self.shift_size > 0:
+ P_l, P_r, P_t, P_b = self.padding
+ x = shifted_x[:, P_t:-P_b, P_l:-P_r, :].contiguous()
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+
+ # FFN
+ x = shortcut + self.drop_path(x)
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'num_heads={self.num_heads}, '
+ f'window_size={self.window_size}, '
+ f'shift_size={self.shift_size}, '
+ f'mlp_ratio={self.mlp_ratio}')
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+
+ # Window/Shifted-Window Spatial MLP
+ if self.shift_size > 0:
+ nW = (H / self.window_size + 1) * (W / self.window_size + 1)
+ else:
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.dim * (self.window_size * self.window_size) * (
+ self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class PatchMerging(nn.Module):
+ r""" Patch Merging Layer.
+
+ Args:
+ input_resolution (tuple[int]): Resolution of input feature.
+ dim (int): Number of input channels.
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm
+ """
+
+ def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.input_resolution = input_resolution
+ self.dim = dim
+ self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
+ self.norm = norm_layer(4 * dim)
+
+ def forward(self, x):
+ """
+ x: B, H*W, C
+ """
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+ assert H % 2 == 0 and W % 2 == 0, f'x size ({H}*{W}) are not even.'
+
+ x = x.view(B, H, W, C)
+
+ x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
+ x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
+ x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
+ x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
+ x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
+ x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
+
+ x = self.norm(x)
+ x = self.reduction(x)
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f'input_resolution={self.input_resolution}, dim={self.dim}'
+
+ def flops(self):
+ H, W = self.input_resolution
+ flops = H * W * self.dim
+ flops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dim
+ return flops
+
+
+class BasicLayer(nn.Module):
+ """A basic Swin MLP layer for one stage.
+
+ Args:
+ dim (int): Number of input channels.
+ input_resolution (tuple[int]): Input resolution.
+ depth (int): Number of blocks.
+ num_heads (int): Number of attention heads.
+ window_size (int): Local window size.
+ mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
+ drop (float, optional): Dropout rate. Default: 0.0
+ drop_path (float | tuple[float], optional): Stochastic depth rate.
+ Default: 0.0
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm
+ downsample (nn.Module | None, optional): Downsample layer at the end
+ of the layer. Default: None
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False.
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ depth,
+ num_heads,
+ window_size,
+ mlp_ratio=4.,
+ drop=0.,
+ drop_path=0.,
+ norm_layer=nn.LayerNorm,
+ downsample=None,
+ use_checkpoint=False):
+
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.depth = depth
+ self.use_checkpoint = use_checkpoint
+
+ # build blocks
+ self.blocks = nn.ModuleList([
+ SwinMLPBlock(
+ dim=dim,
+ input_resolution=input_resolution,
+ num_heads=num_heads,
+ window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2,
+ mlp_ratio=mlp_ratio,
+ drop=drop,
+ drop_path=drop_path[i]
+ if isinstance(drop_path, list) else drop_path,
+ norm_layer=norm_layer) for i in range(depth)
+ ])
+
+ # patch merging layer
+ if downsample is not None:
+ self.downsample = downsample(
+ input_resolution, dim=dim, norm_layer=norm_layer)
+ else:
+ self.downsample = None
+
+ def forward(self, x):
+ for blk in self.blocks:
+ if self.use_checkpoint:
+ x = checkpoint.checkpoint(blk, x)
+ else:
+ x = blk(x)
+ if self.downsample is not None:
+ x = self.downsample(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'depth={self.depth}')
+
+ def flops(self):
+ flops = 0
+ for blk in self.blocks:
+ flops += blk.flops()
+ if self.downsample is not None:
+ flops += self.downsample.flops()
+ return flops
+
+
+class PatchEmbed(nn.Module):
+ r""" Image to Patch Embedding
+
+ Args:
+ img_size (int): Image size. Default: 224.
+ patch_size (int): Patch token size. Default: 4.
+ in_chans (int): Number of input image channels. Default: 3.
+ embed_dim (int): Number of linear projection output channels.
+ Default: 96.
+ norm_layer (nn.Module, optional): Normalization layer. Default: None
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ embed_dim=96,
+ norm_layer=None):
+ super().__init__()
+ img_size = to_2tuple(img_size)
+ patch_size = to_2tuple(patch_size)
+ patches_resolution = [
+ img_size[0] // patch_size[0], img_size[1] // patch_size[1]
+ ]
+ self.img_size = img_size
+ self.patch_size = patch_size
+ self.patches_resolution = patches_resolution
+ self.num_patches = patches_resolution[0] * patches_resolution[1]
+
+ self.in_chans = in_chans
+ self.embed_dim = embed_dim
+
+ self.proj = nn.Conv2d(
+ in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
+ if norm_layer is not None:
+ self.norm = norm_layer(embed_dim)
+ else:
+ self.norm = None
+
+ def forward(self, x):
+ B, C, H, W = x.shape
+ # FIXME look at relaxing size constraints
+ assert H == self.img_size[0] and W == self.img_size[1], \
+ (f"Input image size ({H}*{W}) doesn't match model ("
+ f'{self.img_size[0]}*{self.img_size[1]}).')
+ x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
+ if self.norm is not None:
+ x = self.norm(x)
+ return x
+
+ def flops(self):
+ Ho, Wo = self.patches_resolution
+ flops = Ho * Wo * self.embed_dim * self.in_chans * (
+ self.patch_size[0] * self.patch_size[1])
+ if self.norm is not None:
+ flops += Ho * Wo * self.embed_dim
+ return flops
+
+
+class SwinMLP(nn.Module):
+ r""" Swin MLP
+
+ Args:
+ img_size (int | tuple(int)): Input image size. Default 224
+ patch_size (int | tuple(int)): Patch size. Default: 4
+ in_chans (int): Number of input image channels. Default: 3
+ num_classes (int): Number of classes for classification head.
+ Default: 1000
+ embed_dim (int): Patch embedding dimension. Default: 96
+ depths (tuple(int)): Depth of each Swin MLP layer.
+ num_heads (tuple(int)): Number of attention heads in different layers.
+ window_size (int): Window size. Default: 7
+ mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4
+ drop_rate (float): Dropout rate. Default: 0
+ drop_path_rate (float): Stochastic depth rate. Default: 0.1
+ norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.
+ ape (bool): If True, add absolute position embedding to the patch
+ embedding. Default: False
+ patch_norm (bool): If True, add normalization after patch embedding.
+ Default: True
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ num_classes=1000,
+ embed_dim=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4.,
+ drop_rate=0.,
+ drop_path_rate=0.1,
+ norm_layer=nn.LayerNorm,
+ ape=False,
+ patch_norm=True,
+ use_checkpoint=False,
+ **kwargs):
+ super().__init__()
+
+ self.num_classes = num_classes
+ self.num_layers = len(depths)
+ self.embed_dim = embed_dim
+ self.ape = ape
+ self.patch_norm = patch_norm
+ self.num_features = int(embed_dim * 2**(self.num_layers - 1))
+ self.mlp_ratio = mlp_ratio
+
+ # split image into non-overlapping patches
+ self.patch_embed = PatchEmbed(
+ img_size=img_size,
+ patch_size=patch_size,
+ in_chans=in_chans,
+ embed_dim=embed_dim,
+ norm_layer=norm_layer if self.patch_norm else None)
+ num_patches = self.patch_embed.num_patches
+ patches_resolution = self.patch_embed.patches_resolution
+ self.patches_resolution = patches_resolution
+
+ # absolute position embedding
+ if self.ape:
+ self.absolute_pos_embed = nn.Parameter(
+ torch.zeros(1, num_patches, embed_dim))
+ trunc_normal_(self.absolute_pos_embed, std=.02)
+
+ self.pos_drop = nn.Dropout(p=drop_rate)
+
+ # stochastic depth
+ dpr = [
+ x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))
+ ] # stochastic depth decay rule
+
+ # build layers
+ self.layers = nn.ModuleList()
+ for i_layer in range(self.num_layers):
+ layer = BasicLayer(
+ dim=int(embed_dim * 2**i_layer),
+ input_resolution=(patches_resolution[0] // (2**i_layer),
+ patches_resolution[1] // (2**i_layer)),
+ depth=depths[i_layer],
+ num_heads=num_heads[i_layer],
+ window_size=window_size,
+ mlp_ratio=self.mlp_ratio,
+ drop=drop_rate,
+ drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],
+ norm_layer=norm_layer,
+ downsample=PatchMerging if
+ (i_layer < self.num_layers - 1) else None,
+ use_checkpoint=use_checkpoint)
+ self.layers.append(layer)
+
+ self.norm = norm_layer(self.num_features)
+ self.avgpool = nn.AdaptiveAvgPool1d(1)
+ self.head = nn.Linear(
+ self.num_features,
+ num_classes) if num_classes > 0 else nn.Identity()
+
+ self.apply(self._init_weights)
+
+ def _init_weights(self, m):
+ if isinstance(m, (nn.Linear, nn.Conv1d)):
+ trunc_normal_(m.weight, std=.02)
+ if m.bias is not None:
+ nn.init.constant_(m.bias, 0)
+ elif isinstance(m, nn.LayerNorm):
+ nn.init.constant_(m.bias, 0)
+ nn.init.constant_(m.weight, 1.0)
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return {'absolute_pos_embed'}
+
+ @torch.jit.ignore
+ def no_weight_decay_keywords(self):
+ return {'relative_position_bias_table'}
+
+ def forward_features(self, x):
+ x = self.patch_embed(x)
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+
+ for layer in self.layers:
+ x = layer(x)
+
+ x = self.norm(x) # B L C
+ x = self.avgpool(x.transpose(1, 2)) # B C 1
+ x = torch.flatten(x, 1)
+ return x
+
+ def forward(self, x):
+ x = self.forward_features(x)
+ x = self.head(x)
+ return x
+
+ def flops(self):
+ flops = 0
+ flops += self.patch_embed.flops()
+ for i, layer in enumerate(self.layers):
+ flops += layer.flops()
+ flops += self.num_features * self.patches_resolution[
+ 0] * self.patches_resolution[1] // (2**self.num_layers)
+ flops += self.num_features * self.num_classes
+ return flops
diff --git a/projects/pose_anything/models/backbones/swin_transformer.py b/projects/pose_anything/models/backbones/swin_transformer.py
new file mode 100644
index 0000000000000000000000000000000000000000..17ba4d2c1aa9751cdcaef76e5326b7c730e79a2d
--- /dev/null
+++ b/projects/pose_anything/models/backbones/swin_transformer.py
@@ -0,0 +1,751 @@
+# --------------------------------------------------------
+# Swin Transformer
+# Copyright (c) 2021 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Ze Liu
+# --------------------------------------------------------
+
+import torch
+import torch.nn as nn
+import torch.utils.checkpoint as checkpoint
+from timm.models.layers import DropPath, to_2tuple, trunc_normal_
+
+try:
+ import os
+ import sys
+
+ kernel_path = os.path.abspath(os.path.join('..'))
+ sys.path.append(kernel_path)
+ from kernels.window_process.window_process import (WindowProcess,
+ WindowProcessReverse)
+
+except ImportError:
+ WindowProcess = None
+ WindowProcessReverse = None
+ print(
+ '[Warning] Fused window process have not been installed. Please refer '
+ 'to get_started.md for installation.')
+
+
+class Mlp(nn.Module):
+
+ def __init__(self,
+ in_features,
+ hidden_features=None,
+ out_features=None,
+ act_layer=nn.GELU,
+ drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition(x, window_size):
+ """
+ Args:
+ x: (B, H, W, C)
+ window_size (int): window size
+
+ Returns:
+ windows: (num_windows*B, window_size, window_size, C)
+ """
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size,
+ C)
+ windows = x.permute(0, 1, 3, 2, 4,
+ 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse(windows, window_size, H, W):
+ """
+ Args:
+ windows: (num_windows*B, window_size, window_size, C)
+ window_size (int): Window size
+ H (int): Height of image
+ W (int): Width of image
+
+ Returns:
+ x: (B, H, W, C)
+ """
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size,
+ window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class WindowAttention(nn.Module):
+ r""" Window based multi-head self attention (W-MSA) module with relative
+ position bias. It supports both of shifted and non-shifted window.
+
+ Args: dim (int): Number of input channels. window_size (tuple[int]): The
+ height and width of the window. num_heads (int): Number of attention
+ heads. qkv_bias (bool, optional): If True, add a learnable bias to
+ query, key, value. Default: True qk_scale (float | None, optional):
+ Override default qk scale of head_dim ** -0.5 if set attn_drop (float,
+ optional): Dropout ratio of attention weight. Default: 0.0 proj_drop (
+ float, optional): Dropout ratio of output. Default: 0.0
+ """
+
+ def __init__(self,
+ dim,
+ window_size,
+ num_heads,
+ qkv_bias=True,
+ qk_scale=None,
+ attn_drop=0.,
+ proj_drop=0.):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.num_heads = num_heads
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim**-0.5
+
+ # define a parameter table of relative position bias
+ self.relative_position_bias_table = nn.Parameter(
+ torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1),
+ num_heads)) # 2*Wh-1 * 2*Ww-1, nH
+
+ # get pair-wise relative position index for each token inside the
+ # window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = (coords_flatten[:, :, None] -
+ coords_flatten[:, None, :]) # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(
+ 1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer('relative_position_index',
+ relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+
+ trunc_normal_(self.relative_position_bias_table, std=.02)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+ """
+ Args: x: input features with shape of (num_windows*B, N, C) mask: (
+ 0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
+ """
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads,
+ C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[
+ 2] # make torch script happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias = self.relative_position_bias_table[
+ self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1],
+ self.window_size[0] * self.window_size[1],
+ -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(
+ 2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N,
+ N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, window_size={self.window_size}, num_heads='
+ f'{self.num_heads}')
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+
+class SwinTransformerBlock(nn.Module):
+ r""" Swin Transformer Block.
+
+ Args: dim (int): Number of input channels. input_resolution (tuple[int]):
+ Input resolution. num_heads (int): Number of attention heads. window_size
+ (int): Window size. shift_size (int): Shift size for SW-MSA. mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool,
+ optional): If True, add a learnable bias to query, key, value. Default:
+ True qk_scale (float | None, optional): Override default qk scale of
+ head_dim ** -0.5 if set. drop (float, optional): Dropout rate. Default:
+ 0.0 attn_drop (float, optional): Attention dropout rate. Default: 0.0
+ drop_path (float, optional): Stochastic depth rate. Default: 0.0
+ act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm fused_window_process (bool, optional): If True, use one
+ kernel to fused window shift & window partition for acceleration, similar
+ for the reversed part. Default: False
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ num_heads,
+ window_size=7,
+ shift_size=0,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ act_layer=nn.GELU,
+ norm_layer=nn.LayerNorm,
+ fused_window_process=False):
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ if min(self.input_resolution) <= self.window_size:
+ # if window size is larger than input resolution, we don't
+ # partition windows
+ self.shift_size = 0
+ self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, ('shift_size must in '
+ '0-window_size')
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim,
+ window_size=to_2tuple(self.window_size),
+ num_heads=num_heads,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ attn_drop=attn_drop,
+ proj_drop=drop)
+
+ self.drop_path = DropPath(
+ drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(
+ in_features=dim,
+ hidden_features=mlp_hidden_dim,
+ act_layer=act_layer,
+ drop=drop)
+
+ if self.shift_size > 0:
+ # calculate attention mask for SW-MSA
+ H, W = self.input_resolution
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(
+ img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(
+ -1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0,
+ float(-100.0)).masked_fill(
+ attn_mask == 0, float(0.0))
+ else:
+ attn_mask = None
+
+ self.register_buffer('attn_mask', attn_mask)
+ self.fused_window_process = fused_window_process
+
+ def forward(self, x):
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ if not self.fused_window_process:
+ shifted_x = torch.roll(
+ x,
+ shifts=(-self.shift_size, -self.shift_size),
+ dims=(1, 2))
+ # partition windows
+ x_windows = window_partition(
+ shifted_x,
+ self.window_size) # nW*B, window_size, window_size, C
+ else:
+ x_windows = WindowProcess.apply(x, B, H, W, C,
+ -self.shift_size,
+ self.window_size)
+ else:
+ shifted_x = x
+ # partition windows
+ x_windows = window_partition(
+ shifted_x,
+ self.window_size) # nW*B, window_size, window_size, C
+
+ x_windows = x_windows.view(-1, self.window_size * self.window_size,
+ C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(
+ x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size,
+ self.window_size, C)
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ if not self.fused_window_process:
+ shifted_x = window_reverse(attn_windows, self.window_size, H,
+ W) # B H' W' C
+ x = torch.roll(
+ shifted_x,
+ shifts=(self.shift_size, self.shift_size),
+ dims=(1, 2))
+ else:
+ x = WindowProcessReverse.apply(attn_windows, B, H, W, C,
+ self.shift_size,
+ self.window_size)
+ else:
+ shifted_x = window_reverse(attn_windows, self.window_size, H,
+ W) # B H' W' C
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(x)
+
+ # FFN
+ x = x + self.drop_path(self.mlp(self.norm2(x)))
+
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, '
+ f'input_resolution={self.input_resolution}, '
+ f'num_heads={self.num_heads}, '
+ f'window_size={self.window_size}, '
+ f'shift_size={self.shift_size}, '
+ f'mlp_ratio={self.mlp_ratio}')
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class PatchMerging(nn.Module):
+ r""" Patch Merging Layer.
+
+ Args: input_resolution (tuple[int]): Resolution of input feature. dim (
+ int): Number of input channels. norm_layer (nn.Module, optional):
+ Normalization layer. Default: nn.LayerNorm
+ """
+
+ def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.input_resolution = input_resolution
+ self.dim = dim
+ self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
+ self.norm = norm_layer(4 * dim)
+
+ def forward(self, x):
+ """
+ x: B, H*W, C
+ """
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+ assert H % 2 == 0 and W % 2 == 0, f'x size ({H}*{W}) are not even.'
+
+ x = x.view(B, H, W, C)
+
+ x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
+ x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
+ x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
+ x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
+ x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
+ x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
+
+ x = self.norm(x)
+ x = self.reduction(x)
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f'input_resolution={self.input_resolution}, dim={self.dim}'
+
+ def flops(self):
+ H, W = self.input_resolution
+ flops = H * W * self.dim
+ flops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dim
+ return flops
+
+
+class BasicLayer(nn.Module):
+ """A basic Swin Transformer layer for one stage.
+
+ Args: dim (int): Number of input channels. input_resolution (tuple[int]):
+ Input resolution. depth (int): Number of blocks. num_heads (int): Number
+ of attention heads. window_size (int): Local window size. mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool,
+ optional): If True, add a learnable bias to query, key, value. Default:
+ True qk_scale (float | None, optional): Override default qk scale of
+ head_dim ** -0.5 if set. drop (float, optional): Dropout rate. Default:
+ 0.0 attn_drop (float, optional): Attention dropout rate. Default: 0.0
+ drop_path (float | tuple[float], optional): Stochastic depth rate.
+ Default: 0.0 norm_layer (nn.Module, optional): Normalization layer.
+ Default: nn.LayerNorm downsample (nn.Module | None, optional): Downsample
+ layer at the end of the layer. Default: None use_checkpoint (bool):
+ Whether to use checkpointing to save memory. Default: False.
+ fused_window_process (bool, optional): If True, use one kernel to fused
+ window shift & window partition for acceleration, similar for the
+ reversed part. Default: False
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ depth,
+ num_heads,
+ window_size,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ norm_layer=nn.LayerNorm,
+ downsample=None,
+ use_checkpoint=False,
+ fused_window_process=False):
+
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.depth = depth
+ self.use_checkpoint = use_checkpoint
+
+ # build blocks
+ self.blocks = nn.ModuleList([
+ SwinTransformerBlock(
+ dim=dim,
+ input_resolution=input_resolution,
+ num_heads=num_heads,
+ window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2,
+ mlp_ratio=mlp_ratio,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ drop=drop,
+ attn_drop=attn_drop,
+ drop_path=drop_path[i]
+ if isinstance(drop_path, list) else drop_path,
+ norm_layer=norm_layer,
+ fused_window_process=fused_window_process)
+ for i in range(depth)
+ ])
+
+ # patch merging layer
+ if downsample is not None:
+ self.downsample = downsample(
+ input_resolution, dim=dim, norm_layer=norm_layer)
+ else:
+ self.downsample = None
+
+ def forward(self, x):
+ for blk in self.blocks:
+ if self.use_checkpoint:
+ x = checkpoint.checkpoint(blk, x)
+ else:
+ x = blk(x)
+ if self.downsample is not None:
+ x = self.downsample(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'depth={self.depth}')
+
+ def flops(self):
+ flops = 0
+ for blk in self.blocks:
+ flops += blk.flops()
+ if self.downsample is not None:
+ flops += self.downsample.flops()
+ return flops
+
+
+class PatchEmbed(nn.Module):
+ r""" Image to Patch Embedding
+
+ Args: img_size (int): Image size. Default: 224. patch_size (int): Patch
+ token size. Default: 4. in_chans (int): Number of input image channels.
+ Default: 3. embed_dim (int): Number of linear projection output channels.
+ Default: 96. norm_layer (nn.Module, optional): Normalization layer.
+ Default: None
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ embed_dim=96,
+ norm_layer=None):
+ super().__init__()
+ img_size = to_2tuple(img_size)
+ patch_size = to_2tuple(patch_size)
+ patches_resolution = [
+ img_size[0] // patch_size[0], img_size[1] // patch_size[1]
+ ]
+ self.img_size = img_size
+ self.patch_size = patch_size
+ self.patches_resolution = patches_resolution
+ self.num_patches = patches_resolution[0] * patches_resolution[1]
+
+ self.in_chans = in_chans
+ self.embed_dim = embed_dim
+
+ self.proj = nn.Conv2d(
+ in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
+ if norm_layer is not None:
+ self.norm = norm_layer(embed_dim)
+ else:
+ self.norm = None
+
+ def forward(self, x):
+ B, C, H, W = x.shape
+ # FIXME look at relaxing size constraints
+ assert H == self.img_size[0] and W == self.img_size[1], \
+ (f"Input image size ({H}*{W}) doesn't match model "
+ f'({self.img_size[0]}*{self.img_size[1]}).')
+ x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
+ if self.norm is not None:
+ x = self.norm(x)
+ return x
+
+ def flops(self):
+ Ho, Wo = self.patches_resolution
+ flops = Ho * Wo * self.embed_dim * self.in_chans * (
+ self.patch_size[0] * self.patch_size[1])
+ if self.norm is not None:
+ flops += Ho * Wo * self.embed_dim
+ return flops
+
+
+class SwinTransformer(nn.Module):
+ r""" Swin Transformer A PyTorch impl of : `Swin Transformer: Hierarchical
+ Vision Transformer using Shifted Windows` -
+ https://arxiv.org/pdf/2103.14030
+
+ Args: img_size (int | tuple(int)): Input image size. Default 224
+ patch_size (int | tuple(int)): Patch size. Default: 4 in_chans (int):
+ Number of input image channels. Default: 3 num_classes (int): Number of
+ classes for classification head. Default: 1000 embed_dim (int): Patch
+ embedding dimension. Default: 96 depths (tuple(int)): Depth of each Swin
+ Transformer layer. num_heads (tuple(int)): Number of attention heads in
+ different layers. window_size (int): Window size. Default: 7 mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. Default: 4 qkv_bias (
+ bool): If True, add a learnable bias to query, key, value. Default: True
+ qk_scale (float): Override default qk scale of head_dim ** -0.5 if set.
+ Default: None drop_rate (float): Dropout rate. Default: 0 attn_drop_rate
+ (float): Attention dropout rate. Default: 0 drop_path_rate (float):
+ Stochastic depth rate. Default: 0.1 norm_layer (nn.Module): Normalization
+ layer. Default: nn.LayerNorm. ape (bool): If True, add absolute position
+ embedding to the patch embedding. Default: False patch_norm (bool): If
+ True, add normalization after patch embedding. Default: True
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False fused_window_process (bool, optional): If True, use one
+ kernel to fused window shift & window partition for acceleration, similar
+ for the reversed part. Default: False
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ num_classes=1000,
+ embed_dim=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.1,
+ norm_layer=nn.LayerNorm,
+ ape=False,
+ patch_norm=True,
+ use_checkpoint=False,
+ fused_window_process=False,
+ **kwargs):
+ super().__init__()
+
+ self.num_classes = num_classes
+ self.num_layers = len(depths)
+ self.embed_dim = embed_dim
+ self.ape = ape
+ self.patch_norm = patch_norm
+ self.num_features = int(embed_dim * 2**(self.num_layers - 1))
+ self.mlp_ratio = mlp_ratio
+
+ # split image into non-overlapping patches
+ self.patch_embed = PatchEmbed(
+ img_size=img_size,
+ patch_size=patch_size,
+ in_chans=in_chans,
+ embed_dim=embed_dim,
+ norm_layer=norm_layer if self.patch_norm else None)
+ num_patches = self.patch_embed.num_patches
+ patches_resolution = self.patch_embed.patches_resolution
+ self.patches_resolution = patches_resolution
+
+ # absolute position embedding
+ if self.ape:
+ self.absolute_pos_embed = nn.Parameter(
+ torch.zeros(1, num_patches, embed_dim))
+ trunc_normal_(self.absolute_pos_embed, std=.02)
+
+ self.pos_drop = nn.Dropout(p=drop_rate)
+
+ # stochastic depth
+ dpr = [
+ x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))
+ ] # stochastic depth decay rule
+
+ # build layers
+ self.layers = nn.ModuleList()
+ for i_layer in range(self.num_layers):
+ layer = BasicLayer(
+ dim=int(embed_dim * 2**i_layer),
+ input_resolution=(patches_resolution[0] // (2**i_layer),
+ patches_resolution[1] // (2**i_layer)),
+ depth=depths[i_layer],
+ num_heads=num_heads[i_layer],
+ window_size=window_size,
+ mlp_ratio=self.mlp_ratio,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ drop=drop_rate,
+ attn_drop=attn_drop_rate,
+ drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],
+ norm_layer=norm_layer,
+ downsample=PatchMerging if
+ (i_layer < self.num_layers - 1) else None,
+ use_checkpoint=use_checkpoint,
+ fused_window_process=fused_window_process)
+ self.layers.append(layer)
+
+ self.norm = norm_layer(self.num_features)
+ self.avgpool = nn.AdaptiveAvgPool1d(1)
+ self.head = nn.Linear(
+ self.num_features,
+ num_classes) if num_classes > 0 else nn.Identity()
+
+ self.apply(self._init_weights)
+
+ def _init_weights(self, m):
+ if isinstance(m, nn.Linear):
+ trunc_normal_(m.weight, std=.02)
+ if isinstance(m, nn.Linear) and m.bias is not None:
+ nn.init.constant_(m.bias, 0)
+ elif isinstance(m, nn.LayerNorm):
+ nn.init.constant_(m.bias, 0)
+ nn.init.constant_(m.weight, 1.0)
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return {'absolute_pos_embed'}
+
+ @torch.jit.ignore
+ def no_weight_decay_keywords(self):
+ return {'relative_position_bias_table'}
+
+ def forward_features(self, x):
+ x = self.patch_embed(x)
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+
+ for layer in self.layers:
+ x = layer(x)
+
+ x = self.norm(x) # B L C
+ x = self.avgpool(x.transpose(1, 2)) # B C 1
+ x = torch.flatten(x, 1)
+ return x
+
+ def forward(self, x):
+ x = self.forward_features(x)
+ x = self.head(x)
+ return x
+
+ def flops(self):
+ flops = 0
+ flops += self.patch_embed.flops()
+ for i, layer in enumerate(self.layers):
+ flops += layer.flops()
+ flops += self.num_features * self.patches_resolution[
+ 0] * self.patches_resolution[1] // (2**self.num_layers)
+ flops += self.num_features * self.num_classes
+ return flops
diff --git a/projects/pose_anything/models/backbones/swin_transformer_moe.py b/projects/pose_anything/models/backbones/swin_transformer_moe.py
new file mode 100644
index 0000000000000000000000000000000000000000..f7e07d540fc3b9882a7f96c388d5ce05736780b6
--- /dev/null
+++ b/projects/pose_anything/models/backbones/swin_transformer_moe.py
@@ -0,0 +1,1066 @@
+# --------------------------------------------------------
+# Swin Transformer MoE
+# Copyright (c) 2022 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Ze Liu
+# --------------------------------------------------------
+
+import numpy as np
+import torch
+import torch.distributed as dist
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.utils.checkpoint as checkpoint
+from timm.models.layers import DropPath, to_2tuple, trunc_normal_
+
+try:
+ from tutel import moe as tutel_moe
+except ImportError:
+ tutel_moe = None
+ print(
+ 'Tutel has not been installed. To use Swin-MoE, please install Tutel;'
+ 'otherwise, just ignore this.')
+
+
+class Mlp(nn.Module):
+
+ def __init__(self,
+ in_features,
+ hidden_features=None,
+ out_features=None,
+ act_layer=nn.GELU,
+ drop=0.,
+ mlp_fc2_bias=True):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features, bias=mlp_fc2_bias)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+class MoEMlp(nn.Module):
+
+ def __init__(self,
+ in_features,
+ hidden_features,
+ num_local_experts,
+ top_value,
+ capacity_factor=1.25,
+ cosine_router=False,
+ normalize_gate=False,
+ use_bpr=True,
+ is_gshard_loss=True,
+ gate_noise=1.0,
+ cosine_router_dim=256,
+ cosine_router_init_t=0.5,
+ moe_drop=0.0,
+ init_std=0.02,
+ mlp_fc2_bias=True):
+ super().__init__()
+
+ self.in_features = in_features
+ self.hidden_features = hidden_features
+ self.num_local_experts = num_local_experts
+ self.top_value = top_value
+ self.capacity_factor = capacity_factor
+ self.cosine_router = cosine_router
+ self.normalize_gate = normalize_gate
+ self.use_bpr = use_bpr
+ self.init_std = init_std
+ self.mlp_fc2_bias = mlp_fc2_bias
+
+ self.dist_rank = dist.get_rank()
+
+ self._dropout = nn.Dropout(p=moe_drop)
+
+ _gate_type = {
+ 'type': 'cosine_top' if cosine_router else 'top',
+ 'k': top_value,
+ 'capacity_factor': capacity_factor,
+ 'gate_noise': gate_noise,
+ 'fp32_gate': True
+ }
+ if cosine_router:
+ _gate_type['proj_dim'] = cosine_router_dim
+ _gate_type['init_t'] = cosine_router_init_t
+ self._moe_layer = tutel_moe.moe_layer(
+ gate_type=_gate_type,
+ model_dim=in_features,
+ experts={
+ 'type': 'ffn',
+ 'count_per_node': num_local_experts,
+ 'hidden_size_per_expert': hidden_features,
+ 'activation_fn': lambda x: self._dropout(F.gelu(x))
+ },
+ scan_expert_func=lambda name, param: setattr(
+ param, 'skip_allreduce', True),
+ seeds=(1, self.dist_rank + 1, self.dist_rank + 1),
+ batch_prioritized_routing=use_bpr,
+ normalize_gate=normalize_gate,
+ is_gshard_loss=is_gshard_loss,
+ )
+ if not self.mlp_fc2_bias:
+ self._moe_layer.experts.batched_fc2_bias.requires_grad = False
+
+ def forward(self, x):
+ x = self._moe_layer(x)
+ return x, x.l_aux
+
+ def extra_repr(self) -> str:
+ return (f'[Statistics-{self.dist_rank}] param count for MoE, '
+ f'in_features = {self.in_features}, '
+ f'hidden_features = {self.hidden_features}, '
+ f'num_local_experts = {self.num_local_experts}, '
+ f'top_value = {self.top_value}, '
+ f'cosine_router={self.cosine_router} '
+ f'normalize_gate={self.normalize_gate}, '
+ f'use_bpr = {self.use_bpr}')
+
+ def _init_weights(self):
+ if hasattr(self._moe_layer, 'experts'):
+ trunc_normal_(
+ self._moe_layer.experts.batched_fc1_w, std=self.init_std)
+ trunc_normal_(
+ self._moe_layer.experts.batched_fc2_w, std=self.init_std)
+ nn.init.constant_(self._moe_layer.experts.batched_fc1_bias, 0)
+ nn.init.constant_(self._moe_layer.experts.batched_fc2_bias, 0)
+
+
+def window_partition(x, window_size):
+ """
+ Args:
+ x: (B, H, W, C)
+ window_size (int): window size
+
+ Returns:
+ windows: (num_windows*B, window_size, window_size, C)
+ """
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size,
+ C)
+ windows = x.permute(0, 1, 3, 2, 4,
+ 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse(windows, window_size, H, W):
+ """
+ Args:
+ windows: (num_windows*B, window_size, window_size, C)
+ window_size (int): Window size
+ H (int): Height of image
+ W (int): Width of image
+
+ Returns:
+ x: (B, H, W, C)
+ """
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size,
+ window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class WindowAttention(nn.Module):
+ r""" Window based multi-head self attention (W-MSA) module with relative
+ position bias.
+ It supports both of shifted and non-shifted window.
+
+ Args:
+ dim (int): Number of input channels.
+ window_size (tuple[int]): The height and width of the window.
+ num_heads (int): Number of attention heads.
+ qkv_bias (bool, optional): If True, add a learnable bias to query,
+ key, value. Default: True
+ qk_scale (float | None, optional): Override default qk scale of
+ head_dim ** -0.5 if set
+ attn_drop (float, optional): Dropout ratio of attention weight.
+ Default: 0.0
+ proj_drop (float, optional): Dropout ratio of output. Default: 0.0
+ pretrained_window_size (tuple[int]): The height and width of the
+ window in pretraining.
+ """
+
+ def __init__(self,
+ dim,
+ window_size,
+ num_heads,
+ qkv_bias=True,
+ qk_scale=None,
+ attn_drop=0.,
+ proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ head_dim = dim // num_heads
+ self.scale = qk_scale or head_dim**-0.5
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(
+ nn.Linear(2, 512, bias=True), nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(
+ -(self.window_size[0] - 1),
+ self.window_size[0],
+ dtype=torch.float32)
+ relative_coords_w = torch.arange(
+ -(self.window_size[1] - 1),
+ self.window_size[1],
+ dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h, relative_coords_w])).permute(
+ 1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (
+ pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (
+ pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer('relative_coords_table', relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the
+ # window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = (coords_flatten[:, :, None] -
+ coords_flatten[:, None, :]) # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(
+ 1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :, 0] += self.window_size[0] - 1
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer('relative_position_index',
+ relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+ """
+ Args:
+ x: input features with shape of (num_windows*B, N, C)
+ mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or
+ None
+ """
+ B_, N, C = x.shape
+ qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads,
+ C // self.num_heads).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[
+ 2] # make torchscript happy (cannot use tensor as tuple)
+
+ q = q * self.scale
+ attn = (q @ k.transpose(-2, -1))
+
+ relative_position_bias_table = self.cpb_mlp(
+ self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[
+ self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1],
+ self.window_size[0] * self.window_size[1],
+ -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(
+ 2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N,
+ N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ (f'pretrained_window_size={self.pretrained_window_size}, '
+ f'num_heads={self.num_heads}')
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+
+class SwinTransformerBlock(nn.Module):
+ r""" Swin Transformer Block.
+
+ Args:
+ dim (int): Number of input channels.
+ input_resolution (tuple[int]): Input resolution.
+ num_heads (int): Number of attention heads.
+ window_size (int): Window size.
+ shift_size (int): Shift size for SW-MSA.
+ mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
+ qkv_bias (bool, optional): If True, add a learnable bias to query,
+ key, value. Default: True
+ qk_scale (float | None, optional): Override default qk scale of
+ head_dim ** -0.5 if set.
+ drop (float, optional): Dropout rate. Default: 0.0
+ attn_drop (float, optional): Attention dropout rate. Default: 0.0
+ drop_path (float, optional): Stochastic depth rate. Default: 0.0
+ act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm
+ mlp_fc2_bias (bool): Whether to add bias in fc2 of Mlp. Default: True
+ init_std: Initialization std. Default: 0.02
+ pretrained_window_size (int): Window size in pretraining.
+ is_moe (bool): If True, this block is a MoE block.
+ num_local_experts (int): number of local experts in each device (
+ GPU). Default: 1
+ top_value (int): the value of k in top-k gating. Default: 1
+ capacity_factor (float): the capacity factor in MoE. Default: 1.25
+ cosine_router (bool): Whether to use cosine router. Default: False
+ normalize_gate (bool): Whether to normalize the gating score in top-k
+ gating. Default: False
+ use_bpr (bool): Whether to use batch-prioritized-routing. Default: True
+ is_gshard_loss (bool): If True, use Gshard balance loss.
+ If False, use the load loss and importance
+ loss in "arXiv:1701.06538". Default: False
+ gate_noise (float): the noise ratio in top-k gating. Default: 1.0
+ cosine_router_dim (int): Projection dimension in cosine router.
+ cosine_router_init_t (float): Initialization temperature in cosine
+ router.
+ moe_drop (float): Dropout rate in MoE. Default: 0.0
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ num_heads,
+ window_size=7,
+ shift_size=0,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ act_layer=nn.GELU,
+ norm_layer=nn.LayerNorm,
+ mlp_fc2_bias=True,
+ init_std=0.02,
+ pretrained_window_size=0,
+ is_moe=False,
+ num_local_experts=1,
+ top_value=1,
+ capacity_factor=1.25,
+ cosine_router=False,
+ normalize_gate=False,
+ use_bpr=True,
+ is_gshard_loss=True,
+ gate_noise=1.0,
+ cosine_router_dim=256,
+ cosine_router_init_t=0.5,
+ moe_drop=0.0):
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ self.is_moe = is_moe
+ self.capacity_factor = capacity_factor
+ self.top_value = top_value
+
+ if min(self.input_resolution) <= self.window_size:
+ # if window size is larger than input resolution, we don't
+ # partition windows
+ self.shift_size = 0
+ self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, ('shift_size must in '
+ '0-window_size')
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim,
+ window_size=to_2tuple(self.window_size),
+ num_heads=num_heads,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ attn_drop=attn_drop,
+ proj_drop=drop,
+ pretrained_window_size=to_2tuple(pretrained_window_size))
+
+ self.drop_path = DropPath(
+ drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ if self.is_moe:
+ self.mlp = MoEMlp(
+ in_features=dim,
+ hidden_features=mlp_hidden_dim,
+ num_local_experts=num_local_experts,
+ top_value=top_value,
+ capacity_factor=capacity_factor,
+ cosine_router=cosine_router,
+ normalize_gate=normalize_gate,
+ use_bpr=use_bpr,
+ is_gshard_loss=is_gshard_loss,
+ gate_noise=gate_noise,
+ cosine_router_dim=cosine_router_dim,
+ cosine_router_init_t=cosine_router_init_t,
+ moe_drop=moe_drop,
+ mlp_fc2_bias=mlp_fc2_bias,
+ init_std=init_std)
+ else:
+ self.mlp = Mlp(
+ in_features=dim,
+ hidden_features=mlp_hidden_dim,
+ act_layer=act_layer,
+ drop=drop,
+ mlp_fc2_bias=mlp_fc2_bias)
+
+ if self.shift_size > 0:
+ # calculate attention mask for SW-MSA
+ H, W = self.input_resolution
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(
+ img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(
+ -1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0,
+ float(-100.0)).masked_fill(
+ attn_mask == 0, float(0.0))
+ else:
+ attn_mask = None
+
+ self.register_buffer('attn_mask', attn_mask)
+
+ def forward(self, x):
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+
+ shortcut = x
+ x = self.norm1(x)
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(
+ x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(
+ shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size,
+ C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(
+ x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size,
+ self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H,
+ W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(
+ shifted_x,
+ shifts=(self.shift_size, self.shift_size),
+ dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(x)
+
+ # FFN
+ shortcut = x
+ x = self.norm2(x)
+ if self.is_moe:
+ x, l_aux = self.mlp(x)
+ x = shortcut + self.drop_path(x)
+ return x, l_aux
+ else:
+ x = shortcut + self.drop_path(self.mlp(x))
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, '
+ f'input_resolution={self.input_resolution}, '
+ f'num_heads={self.num_heads}, '
+ f'window_size={self.window_size}, '
+ f'shift_size={self.shift_size}, '
+ f'mlp_ratio={self.mlp_ratio}')
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ if self.is_moe:
+ flops += (2 * H * W * self.dim * self.dim * self.mlp_ratio *
+ self.capacity_factor * self.top_value)
+ else:
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class PatchMerging(nn.Module):
+ r""" Patch Merging Layer.
+
+ Args:
+ input_resolution (tuple[int]): Resolution of input feature.
+ dim (int): Number of input channels.
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm
+ """
+
+ def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.input_resolution = input_resolution
+ self.dim = dim
+ self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
+ self.norm = norm_layer(4 * dim)
+
+ def forward(self, x):
+ """
+ x: B, H*W, C
+ """
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+ assert H % 2 == 0 and W % 2 == 0, f'x size ({H}*{W}) are not even.'
+
+ x = x.view(B, H, W, C)
+
+ x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
+ x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
+ x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
+ x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
+ x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
+ x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
+
+ x = self.norm(x)
+ x = self.reduction(x)
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f'input_resolution={self.input_resolution}, dim={self.dim}'
+
+ def flops(self):
+ H, W = self.input_resolution
+ flops = H * W * self.dim
+ flops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dim
+ return flops
+
+
+class BasicLayer(nn.Module):
+ """A basic Swin Transformer layer for one stage.
+
+ Args:
+ dim (int): Number of input channels.
+ input_resolution (tuple[int]): Input resolution.
+ depth (int): Number of blocks.
+ num_heads (int): Number of attention heads.
+ window_size (int): Local window size.
+ mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
+ qkv_bias (bool, optional): If True, add a learnable bias to query,
+ key, value. Default: True
+ qk_scale (float | None, optional): Override default qk scale of
+ head_dim ** -0.5 if set.
+ drop (float, optional): Dropout rate. Default: 0.0
+ attn_drop (float, optional): Attention dropout rate. Default: 0.0
+ drop_path (float | tuple[float], optional): Stochastic depth rate.
+ Default: 0.0
+ norm_layer (nn.Module, optional): Normalization layer. Default:
+ nn.LayerNorm
+ downsample (nn.Module | None, optional): Downsample layer at the end
+ of the layer. Default: None
+ mlp_fc2_bias (bool): Whether to add bias in fc2 of Mlp. Default: True
+ init_std: Initialization std. Default: 0.02
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False.
+ pretrained_window_size (int): Local window size in pretraining.
+ moe_blocks (tuple(int)): The index of each MoE block.
+ num_local_experts (int): number of local experts in each device (
+ GPU). Default: 1
+ top_value (int): the value of k in top-k gating. Default: 1
+ capacity_factor (float): the capacity factor in MoE. Default: 1.25
+ cosine_router (bool): Whether to use cosine router Default: False
+ normalize_gate (bool): Whether to normalize the gating score in top-k
+ gating. Default: False
+ use_bpr (bool): Whether to use batch-prioritized-routing. Default: True
+ is_gshard_loss (bool): If True, use Gshard balance loss.
+ If False, use the load loss and importance
+ loss in "arXiv:1701.06538". Default: False
+ gate_noise (float): the noise ratio in top-k gating. Default: 1.0
+ cosine_router_dim (int): Projection dimension in cosine router.
+ cosine_router_init_t (float): Initialization temperature in cosine
+ router.
+ moe_drop (float): Dropout rate in MoE. Default: 0.0
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ depth,
+ num_heads,
+ window_size,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ norm_layer=nn.LayerNorm,
+ downsample=None,
+ mlp_fc2_bias=True,
+ init_std=0.02,
+ use_checkpoint=False,
+ pretrained_window_size=0,
+ moe_block=[-1],
+ num_local_experts=1,
+ top_value=1,
+ capacity_factor=1.25,
+ cosine_router=False,
+ normalize_gate=False,
+ use_bpr=True,
+ is_gshard_loss=True,
+ cosine_router_dim=256,
+ cosine_router_init_t=0.5,
+ gate_noise=1.0,
+ moe_drop=0.0):
+
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.depth = depth
+ self.use_checkpoint = use_checkpoint
+
+ # build blocks
+ self.blocks = nn.ModuleList([
+ SwinTransformerBlock(
+ dim=dim,
+ input_resolution=input_resolution,
+ num_heads=num_heads,
+ window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2,
+ mlp_ratio=mlp_ratio,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ drop=drop,
+ attn_drop=attn_drop,
+ drop_path=drop_path[i]
+ if isinstance(drop_path, list) else drop_path,
+ norm_layer=norm_layer,
+ mlp_fc2_bias=mlp_fc2_bias,
+ init_std=init_std,
+ pretrained_window_size=pretrained_window_size,
+ is_moe=True if i in moe_block else False,
+ num_local_experts=num_local_experts,
+ top_value=top_value,
+ capacity_factor=capacity_factor,
+ cosine_router=cosine_router,
+ normalize_gate=normalize_gate,
+ use_bpr=use_bpr,
+ is_gshard_loss=is_gshard_loss,
+ gate_noise=gate_noise,
+ cosine_router_dim=cosine_router_dim,
+ cosine_router_init_t=cosine_router_init_t,
+ moe_drop=moe_drop) for i in range(depth)
+ ])
+
+ # patch merging layer
+ if downsample is not None:
+ self.downsample = downsample(
+ input_resolution, dim=dim, norm_layer=norm_layer)
+ else:
+ self.downsample = None
+
+ def forward(self, x):
+ l_aux = 0.0
+ for blk in self.blocks:
+ if self.use_checkpoint:
+ out = checkpoint.checkpoint(blk, x)
+ else:
+ out = blk(x)
+ if isinstance(out, tuple):
+ x = out[0]
+ cur_l_aux = out[1]
+ l_aux = cur_l_aux + l_aux
+ else:
+ x = out
+
+ if self.downsample is not None:
+ x = self.downsample(x)
+ return x, l_aux
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'depth={self.depth}')
+
+ def flops(self):
+ flops = 0
+ for blk in self.blocks:
+ flops += blk.flops()
+ if self.downsample is not None:
+ flops += self.downsample.flops()
+ return flops
+
+
+class PatchEmbed(nn.Module):
+ r""" Image to Patch Embedding
+
+ Args:
+ img_size (int): Image size. Default: 224.
+ patch_size (int): Patch token size. Default: 4.
+ in_chans (int): Number of input image channels. Default: 3.
+ embed_dim (int): Number of linear projection output channels.
+ Default: 96.
+ norm_layer (nn.Module, optional): Normalization layer. Default: None
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ embed_dim=96,
+ norm_layer=None):
+ super().__init__()
+ img_size = to_2tuple(img_size)
+ patch_size = to_2tuple(patch_size)
+ patches_resolution = [
+ img_size[0] // patch_size[0], img_size[1] // patch_size[1]
+ ]
+ self.img_size = img_size
+ self.patch_size = patch_size
+ self.patches_resolution = patches_resolution
+ self.num_patches = patches_resolution[0] * patches_resolution[1]
+
+ self.in_chans = in_chans
+ self.embed_dim = embed_dim
+
+ self.proj = nn.Conv2d(
+ in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
+ if norm_layer is not None:
+ self.norm = norm_layer(embed_dim)
+ else:
+ self.norm = None
+
+ def forward(self, x):
+ B, C, H, W = x.shape
+ # FIXME look at relaxing size constraints
+ assert H == self.img_size[0] and W == self.img_size[1], \
+ (f"Input image size ({H}*{W}) doesn't match model ("
+ f'{self.img_size[0]}*{self.img_size[1]}).')
+ x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
+ if self.norm is not None:
+ x = self.norm(x)
+ return x
+
+ def flops(self):
+ Ho, Wo = self.patches_resolution
+ flops = Ho * Wo * self.embed_dim * self.in_chans * (
+ self.patch_size[0] * self.patch_size[1])
+ if self.norm is not None:
+ flops += Ho * Wo * self.embed_dim
+ return flops
+
+
+class SwinTransformerMoE(nn.Module):
+ r""" Swin Transformer
+ A PyTorch impl of : `Swin Transformer: Hierarchical Vision
+ Transformer using Shifted Windows` -
+ https://arxiv.org/pdf/2103.14030
+
+ Args:
+ img_size (int | tuple(int)): Input image size. Default 224
+ patch_size (int | tuple(int)): Patch size. Default: 4
+ in_chans (int): Number of input image channels. Default: 3
+ num_classes (int): Number of classes for classification head.
+ Default: 1000
+ embed_dim (int): Patch embedding dimension. Default: 96
+ depths (tuple(int)): Depth of each Swin Transformer layer.
+ num_heads (tuple(int)): Number of attention heads in different layers.
+ window_size (int): Window size. Default: 7
+ mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4
+ qkv_bias (bool): If True, add a learnable bias to query, key, value.
+ Default: True
+ qk_scale (float): Override default qk scale of head_dim ** -0.5 if
+ set. Default: None
+ drop_rate (float): Dropout rate. Default: 0
+ attn_drop_rate (float): Attention dropout rate. Default: 0
+ drop_path_rate (float): Stochastic depth rate. Default: 0.1
+ norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.
+ ape (bool): If True, add absolute position embedding to the patch
+ embedding. Default: False
+ patch_norm (bool): If True, add normalization after patch embedding.
+ Default: True
+ mlp_fc2_bias (bool): Whether to add bias in fc2 of Mlp. Default: True
+ init_std: Initialization std. Default: 0.02
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False
+ pretrained_window_sizes (tuple(int)): Pretrained window sizes of each
+ layer.
+ moe_blocks (tuple(tuple(int))): The index of each MoE block in each
+ layer.
+ num_local_experts (int): number of local experts in each device (
+ GPU). Default: 1
+ top_value (int): the value of k in top-k gating. Default: 1
+ capacity_factor (float): the capacity factor in MoE. Default: 1.25
+ cosine_router (bool): Whether to use cosine router Default: False
+ normalize_gate (bool): Whether to normalize the gating score in top-k
+ gating. Default: False
+ use_bpr (bool): Whether to use batch-prioritized-routing. Default: True
+ is_gshard_loss (bool): If True, use Gshard balance loss.
+ If False, use the load loss and importance
+ loss in "arXiv:1701.06538". Default: False
+ gate_noise (float): the noise ratio in top-k gating. Default: 1.0
+ cosine_router_dim (int): Projection dimension in cosine router.
+ cosine_router_init_t (float): Initialization temperature in cosine
+ router.
+ moe_drop (float): Dropout rate in MoE. Default: 0.0
+ aux_loss_weight (float): auxiliary loss weight. Default: 0.1
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ num_classes=1000,
+ embed_dim=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.1,
+ norm_layer=nn.LayerNorm,
+ ape=False,
+ patch_norm=True,
+ mlp_fc2_bias=True,
+ init_std=0.02,
+ use_checkpoint=False,
+ pretrained_window_sizes=[0, 0, 0, 0],
+ moe_blocks=[[-1], [-1], [-1], [-1]],
+ num_local_experts=1,
+ top_value=1,
+ capacity_factor=1.25,
+ cosine_router=False,
+ normalize_gate=False,
+ use_bpr=True,
+ is_gshard_loss=True,
+ gate_noise=1.0,
+ cosine_router_dim=256,
+ cosine_router_init_t=0.5,
+ moe_drop=0.0,
+ aux_loss_weight=0.01,
+ **kwargs):
+ super().__init__()
+ self._ddp_params_and_buffers_to_ignore = list()
+
+ self.num_classes = num_classes
+ self.num_layers = len(depths)
+ self.embed_dim = embed_dim
+ self.ape = ape
+ self.patch_norm = patch_norm
+ self.num_features = int(embed_dim * 2**(self.num_layers - 1))
+ self.mlp_ratio = mlp_ratio
+ self.init_std = init_std
+ self.aux_loss_weight = aux_loss_weight
+ self.num_local_experts = num_local_experts
+ self.global_experts = num_local_experts * dist.get_world_size() if (
+ num_local_experts > 0) \
+ else dist.get_world_size() // (-num_local_experts)
+ self.sharded_count = (
+ 1.0 / num_local_experts) if num_local_experts > 0 else (
+ -num_local_experts)
+
+ # split image into non-overlapping patches
+ self.patch_embed = PatchEmbed(
+ img_size=img_size,
+ patch_size=patch_size,
+ in_chans=in_chans,
+ embed_dim=embed_dim,
+ norm_layer=norm_layer if self.patch_norm else None)
+ num_patches = self.patch_embed.num_patches
+ patches_resolution = self.patch_embed.patches_resolution
+ self.patches_resolution = patches_resolution
+
+ # absolute position embedding
+ if self.ape:
+ self.absolute_pos_embed = nn.Parameter(
+ torch.zeros(1, num_patches, embed_dim))
+ trunc_normal_(self.absolute_pos_embed, std=self.init_std)
+
+ self.pos_drop = nn.Dropout(p=drop_rate)
+
+ # stochastic depth
+ dpr = [
+ x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))
+ ] # stochastic depth decay rule
+
+ # build layers
+ self.layers = nn.ModuleList()
+ for i_layer in range(self.num_layers):
+ layer = BasicLayer(
+ dim=int(embed_dim * 2**i_layer),
+ input_resolution=(patches_resolution[0] // (2**i_layer),
+ patches_resolution[1] // (2**i_layer)),
+ depth=depths[i_layer],
+ num_heads=num_heads[i_layer],
+ window_size=window_size,
+ mlp_ratio=self.mlp_ratio,
+ qkv_bias=qkv_bias,
+ qk_scale=qk_scale,
+ drop=drop_rate,
+ attn_drop=attn_drop_rate,
+ drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],
+ norm_layer=norm_layer,
+ downsample=PatchMerging if
+ (i_layer < self.num_layers - 1) else None,
+ mlp_fc2_bias=mlp_fc2_bias,
+ init_std=init_std,
+ use_checkpoint=use_checkpoint,
+ pretrained_window_size=pretrained_window_sizes[i_layer],
+ moe_block=moe_blocks[i_layer],
+ num_local_experts=num_local_experts,
+ top_value=top_value,
+ capacity_factor=capacity_factor,
+ cosine_router=cosine_router,
+ normalize_gate=normalize_gate,
+ use_bpr=use_bpr,
+ is_gshard_loss=is_gshard_loss,
+ gate_noise=gate_noise,
+ cosine_router_dim=cosine_router_dim,
+ cosine_router_init_t=cosine_router_init_t,
+ moe_drop=moe_drop)
+ self.layers.append(layer)
+
+ self.norm = norm_layer(self.num_features)
+ self.avgpool = nn.AdaptiveAvgPool1d(1)
+ self.head = nn.Linear(
+ self.num_features,
+ num_classes) if num_classes > 0 else nn.Identity()
+
+ self.apply(self._init_weights)
+
+ def _init_weights(self, m):
+ if isinstance(m, nn.Linear):
+ trunc_normal_(m.weight, std=self.init_std)
+ if isinstance(m, nn.Linear) and m.bias is not None:
+ nn.init.constant_(m.bias, 0)
+ elif isinstance(m, nn.LayerNorm):
+ nn.init.constant_(m.bias, 0)
+ nn.init.constant_(m.weight, 1.0)
+ elif isinstance(m, MoEMlp):
+ m._init_weights()
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return {'absolute_pos_embed'}
+
+ @torch.jit.ignore
+ def no_weight_decay_keywords(self):
+ return {
+ 'cpb_mlp', 'relative_position_bias_table', 'fc1_bias', 'fc2_bias',
+ 'temperature', 'cosine_projector', 'sim_matrix'
+ }
+
+ def forward_features(self, x):
+ x = self.patch_embed(x)
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+ l_aux = 0.0
+ for layer in self.layers:
+ x, cur_l_aux = layer(x)
+ l_aux = cur_l_aux + l_aux
+
+ x = self.norm(x) # B L C
+ x = self.avgpool(x.transpose(1, 2)) # B C 1
+ x = torch.flatten(x, 1)
+ return x, l_aux
+
+ def forward(self, x):
+ x, l_aux = self.forward_features(x)
+ x = self.head(x)
+ return x, l_aux * self.aux_loss_weight
+
+ def add_param_to_skip_allreduce(self, param_name):
+ self._ddp_params_and_buffers_to_ignore.append(param_name)
+
+ def flops(self):
+ flops = 0
+ flops += self.patch_embed.flops()
+ for i, layer in enumerate(self.layers):
+ flops += layer.flops()
+ flops += self.num_features * self.patches_resolution[
+ 0] * self.patches_resolution[1] // (2**self.num_layers)
+ flops += self.num_features * self.num_classes
+ return flops
diff --git a/projects/pose_anything/models/backbones/swin_transformer_v2.py b/projects/pose_anything/models/backbones/swin_transformer_v2.py
new file mode 100644
index 0000000000000000000000000000000000000000..0ec6f66448e0600a3311ebf51afb0d1e52323c43
--- /dev/null
+++ b/projects/pose_anything/models/backbones/swin_transformer_v2.py
@@ -0,0 +1,826 @@
+# --------------------------------------------------------
+# Swin Transformer V2
+# Copyright (c) 2022 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Ze Liu
+# --------------------------------------------------------
+
+import numpy as np
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.utils.checkpoint as checkpoint
+from timm.models.layers import DropPath, to_2tuple, trunc_normal_
+
+from mmpose.models.builder import BACKBONES
+
+
+class Mlp(nn.Module):
+
+ def __init__(self,
+ in_features,
+ hidden_features=None,
+ out_features=None,
+ act_layer=nn.GELU,
+ drop=0.):
+ super().__init__()
+ out_features = out_features or in_features
+ hidden_features = hidden_features or in_features
+ self.fc1 = nn.Linear(in_features, hidden_features)
+ self.act = act_layer()
+ self.fc2 = nn.Linear(hidden_features, out_features)
+ self.drop = nn.Dropout(drop)
+
+ def forward(self, x):
+ x = self.fc1(x)
+ x = self.act(x)
+ x = self.drop(x)
+ x = self.fc2(x)
+ x = self.drop(x)
+ return x
+
+
+def window_partition(x, window_size):
+ """
+ Args:
+ x: (B, H, W, C)
+ window_size (int): window size
+
+ Returns:
+ windows: (num_windows*B, window_size, window_size, C)
+ """
+ B, H, W, C = x.shape
+ x = x.view(B, H // window_size, window_size, W // window_size, window_size,
+ C)
+ windows = x.permute(0, 1, 3, 2, 4,
+ 5).contiguous().view(-1, window_size, window_size, C)
+ return windows
+
+
+def window_reverse(windows, window_size, H, W):
+ """
+ Args:
+ windows: (num_windows*B, window_size, window_size, C)
+ window_size (int): Window size
+ H (int): Height of image
+ W (int): Width of image
+
+ Returns:
+ x: (B, H, W, C)
+ """
+ B = int(windows.shape[0] / (H * W / window_size / window_size))
+ x = windows.view(B, H // window_size, W // window_size, window_size,
+ window_size, -1)
+ x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
+ return x
+
+
+class WindowAttention(nn.Module):
+ r""" Window based multi-head self attention (W-MSA) module with relative
+ position bias. It supports both of shifted and non-shifted window.
+
+ Args: dim (int): Number of input channels. window_size (tuple[int]): The
+ height and width of the window. num_heads (int): Number of attention
+ heads. qkv_bias (bool, optional): If True, add a learnable bias to
+ query, key, value. Default: True attn_drop (float, optional): Dropout
+ ratio of attention weight. Default: 0.0 proj_drop (float, optional):
+ Dropout ratio of output. Default: 0.0 pretrained_window_size (tuple[
+ int]): The height and width of the window in pre-training.
+ """
+
+ def __init__(self,
+ dim,
+ window_size,
+ num_heads,
+ qkv_bias=True,
+ attn_drop=0.,
+ proj_drop=0.,
+ pretrained_window_size=[0, 0]):
+
+ super().__init__()
+ self.dim = dim
+ self.window_size = window_size # Wh, Ww
+ self.pretrained_window_size = pretrained_window_size
+ self.num_heads = num_heads
+
+ self.logit_scale = nn.Parameter(
+ torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
+
+ # mlp to generate continuous relative position bias
+ self.cpb_mlp = nn.Sequential(
+ nn.Linear(2, 512, bias=True), nn.ReLU(inplace=True),
+ nn.Linear(512, num_heads, bias=False))
+
+ # get relative_coords_table
+ relative_coords_h = torch.arange(
+ -(self.window_size[0] - 1),
+ self.window_size[0],
+ dtype=torch.float32)
+ relative_coords_w = torch.arange(
+ -(self.window_size[1] - 1),
+ self.window_size[1],
+ dtype=torch.float32)
+ relative_coords_table = torch.stack(
+ torch.meshgrid([relative_coords_h, relative_coords_w])).permute(
+ 1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
+ if pretrained_window_size[0] > 0:
+ relative_coords_table[:, :, :, 0] /= (
+ pretrained_window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (
+ pretrained_window_size[1] - 1)
+ else:
+ relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
+ relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
+ relative_coords_table *= 8 # normalize to -8, 8
+ relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
+ torch.abs(relative_coords_table) + 1.0) / np.log2(8)
+
+ self.register_buffer('relative_coords_table', relative_coords_table)
+
+ # get pair-wise relative position index for each token inside the
+ # window
+ coords_h = torch.arange(self.window_size[0])
+ coords_w = torch.arange(self.window_size[1])
+ coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
+ coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
+ relative_coords = coords_flatten[:, :,
+ None] - coords_flatten[:, None, :] #
+ # 2, Wh*Ww, Wh*Ww
+ relative_coords = relative_coords.permute(
+ 1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
+ relative_coords[:, :,
+ 0] += self.window_size[0] - 1 # shift to start from 0
+ relative_coords[:, :, 1] += self.window_size[1] - 1
+ relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
+ relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
+ self.register_buffer('relative_position_index',
+ relative_position_index)
+
+ self.qkv = nn.Linear(dim, dim * 3, bias=False)
+ if qkv_bias:
+ self.q_bias = nn.Parameter(torch.zeros(dim))
+ self.v_bias = nn.Parameter(torch.zeros(dim))
+ else:
+ self.q_bias = None
+ self.v_bias = None
+ self.attn_drop = nn.Dropout(attn_drop)
+ self.proj = nn.Linear(dim, dim)
+ self.proj_drop = nn.Dropout(proj_drop)
+ self.softmax = nn.Softmax(dim=-1)
+
+ def forward(self, x, mask=None):
+ """
+ Args: x: input features with shape of (num_windows*B, N, C) mask: (
+ 0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
+ """
+ B_, N, C = x.shape
+ qkv_bias = None
+ if self.q_bias is not None:
+ qkv_bias = torch.cat(
+ (self.q_bias,
+ torch.zeros_like(self.v_bias,
+ requires_grad=False), self.v_bias))
+ qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
+ qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
+ q, k, v = qkv[0], qkv[1], qkv[
+ 2] # make torchscript happy (cannot use tensor as tuple)
+
+ # cosine attention
+ attn = (
+ F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
+ logit_scale = torch.clamp(
+ self.logit_scale,
+ max=torch.log(torch.tensor(1. / 0.01, device=x.device))).exp()
+ attn = attn * logit_scale
+
+ relative_position_bias_table = self.cpb_mlp(
+ self.relative_coords_table).view(-1, self.num_heads)
+ relative_position_bias = relative_position_bias_table[
+ self.relative_position_index.view(-1)].view(
+ self.window_size[0] * self.window_size[1],
+ self.window_size[0] * self.window_size[1],
+ -1) # Wh*Ww,Wh*Ww,nH
+ relative_position_bias = relative_position_bias.permute(
+ 2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
+ relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
+ attn = attn + relative_position_bias.unsqueeze(0)
+
+ if mask is not None:
+ nW = mask.shape[0]
+ attn = attn.view(B_ // nW, nW, self.num_heads, N,
+ N) + mask.unsqueeze(1).unsqueeze(0)
+ attn = attn.view(-1, self.num_heads, N, N)
+ attn = self.softmax(attn)
+ else:
+ attn = self.softmax(attn)
+
+ attn = self.attn_drop(attn)
+
+ x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
+ x = self.proj(x)
+ x = self.proj_drop(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return f'dim={self.dim}, window_size={self.window_size}, ' \
+ (f'pretrained_window_size={self.pretrained_window_size}, '
+ f'num_heads={self.num_heads}')
+
+ def flops(self, N):
+ # calculate flops for 1 window with token length of N
+ flops = 0
+ # qkv = self.qkv(x)
+ flops += N * self.dim * 3 * self.dim
+ # attn = (q @ k.transpose(-2, -1))
+ flops += self.num_heads * N * (self.dim // self.num_heads) * N
+ # x = (attn @ v)
+ flops += self.num_heads * N * N * (self.dim // self.num_heads)
+ # x = self.proj(x)
+ flops += N * self.dim * self.dim
+ return flops
+
+
+class SwinTransformerBlock(nn.Module):
+ r""" Swin Transformer Block.
+
+ Args: dim (int): Number of input channels. input_resolution (tuple[int]):
+ Input resolution. num_heads (int): Number of attention heads. window_size
+ (int): Window size. shift_size (int): Shift size for SW-MSA. mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool,
+ optional): If True, add a learnable bias to query, key, value. Default:
+ True drop (float, optional): Dropout rate. Default: 0.0 attn_drop (float,
+ optional): Attention dropout rate. Default: 0.0 drop_path (float,
+ optional): Stochastic depth rate. Default: 0.0 act_layer (nn.Module,
+ optional): Activation layer. Default: nn.GELU norm_layer (nn.Module,
+ optional): Normalization layer. Default: nn.LayerNorm
+ pretrained_window_size (int): Window size in pre-training.
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ num_heads,
+ window_size=7,
+ shift_size=0,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ act_layer=nn.GELU,
+ norm_layer=nn.LayerNorm,
+ pretrained_window_size=0):
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.num_heads = num_heads
+ self.window_size = window_size
+ self.shift_size = shift_size
+ self.mlp_ratio = mlp_ratio
+ if min(self.input_resolution) <= self.window_size:
+ # if window size is larger than input resolution, we don't
+ # partition windows
+ self.shift_size = 0
+ self.window_size = min(self.input_resolution)
+ assert 0 <= self.shift_size < self.window_size, ('shift_size must in '
+ '0-window_size')
+
+ self.norm1 = norm_layer(dim)
+ self.attn = WindowAttention(
+ dim,
+ window_size=to_2tuple(self.window_size),
+ num_heads=num_heads,
+ qkv_bias=qkv_bias,
+ attn_drop=attn_drop,
+ proj_drop=drop,
+ pretrained_window_size=to_2tuple(pretrained_window_size))
+
+ self.drop_path = DropPath(
+ drop_path) if drop_path > 0. else nn.Identity()
+ self.norm2 = norm_layer(dim)
+ mlp_hidden_dim = int(dim * mlp_ratio)
+ self.mlp = Mlp(
+ in_features=dim,
+ hidden_features=mlp_hidden_dim,
+ act_layer=act_layer,
+ drop=drop)
+
+ if self.shift_size > 0:
+ # calculate attention mask for SW-MSA
+ H, W = self.input_resolution
+ img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
+ h_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ w_slices = (slice(0, -self.window_size),
+ slice(-self.window_size,
+ -self.shift_size), slice(-self.shift_size, None))
+ cnt = 0
+ for h in h_slices:
+ for w in w_slices:
+ img_mask[:, h, w, :] = cnt
+ cnt += 1
+
+ mask_windows = window_partition(
+ img_mask, self.window_size) # nW, window_size, window_size, 1
+ mask_windows = mask_windows.view(
+ -1, self.window_size * self.window_size)
+ attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
+ attn_mask = attn_mask.masked_fill(attn_mask != 0,
+ float(-100.0)).masked_fill(
+ attn_mask == 0, float(0.0))
+ else:
+ attn_mask = None
+
+ self.register_buffer('attn_mask', attn_mask)
+
+ def forward(self, x):
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+
+ shortcut = x
+ x = x.view(B, H, W, C)
+
+ # cyclic shift
+ if self.shift_size > 0:
+ shifted_x = torch.roll(
+ x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
+ else:
+ shifted_x = x
+
+ # partition windows
+ x_windows = window_partition(
+ shifted_x, self.window_size) # nW*B, window_size, window_size, C
+ x_windows = x_windows.view(-1, self.window_size * self.window_size,
+ C) # nW*B, window_size*window_size, C
+
+ # W-MSA/SW-MSA
+ attn_windows = self.attn(
+ x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
+
+ # merge windows
+ attn_windows = attn_windows.view(-1, self.window_size,
+ self.window_size, C)
+ shifted_x = window_reverse(attn_windows, self.window_size, H,
+ W) # B H' W' C
+
+ # reverse cyclic shift
+ if self.shift_size > 0:
+ x = torch.roll(
+ shifted_x,
+ shifts=(self.shift_size, self.shift_size),
+ dims=(1, 2))
+ else:
+ x = shifted_x
+ x = x.view(B, H * W, C)
+ x = shortcut + self.drop_path(self.norm1(x))
+
+ # FFN
+ x = x + self.drop_path(self.norm2(self.mlp(x)))
+
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'num_heads={self.num_heads}, '
+ f'window_size={self.window_size}, '
+ f'shift_size={self.shift_size}, '
+ f'mlp_ratio={self.mlp_ratio}')
+
+ def flops(self):
+ flops = 0
+ H, W = self.input_resolution
+ # norm1
+ flops += self.dim * H * W
+ # W-MSA/SW-MSA
+ nW = H * W / self.window_size / self.window_size
+ flops += nW * self.attn.flops(self.window_size * self.window_size)
+ # mlp
+ flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
+ # norm2
+ flops += self.dim * H * W
+ return flops
+
+
+class PatchMerging(nn.Module):
+ r""" Patch Merging Layer.
+
+ Args: input_resolution (tuple[int]): Resolution of input feature. dim (
+ int): Number of input channels. norm_layer (nn.Module, optional):
+ Normalization layer. Default: nn.LayerNorm
+ """
+
+ def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
+ super().__init__()
+ self.input_resolution = input_resolution
+ self.dim = dim
+ self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
+ self.norm = norm_layer(2 * dim)
+
+ def forward(self, x):
+ """
+ x: B, H*W, C
+ """
+ H, W = self.input_resolution
+ B, L, C = x.shape
+ assert L == H * W, 'input feature has wrong size'
+ assert H % 2 == 0 and W % 2 == 0, f'x size ({H}*{W}) are not even.'
+
+ x = x.view(B, H, W, C)
+
+ x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
+ x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
+ x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
+ x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
+ x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
+ x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
+
+ x = self.reduction(x)
+ x = self.norm(x)
+
+ return x
+
+ def extra_repr(self) -> str:
+ return f'input_resolution={self.input_resolution}, dim={self.dim}'
+
+ def flops(self):
+ H, W = self.input_resolution
+ flops = (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dim
+ flops += H * W * self.dim // 2
+ return flops
+
+
+class BasicLayer(nn.Module):
+ """A basic Swin Transformer layer for one stage.
+
+ Args: dim (int): Number of input channels. input_resolution (tuple[int]):
+ Input resolution. depth (int): Number of blocks. num_heads (int): Number
+ of attention heads. window_size (int): Local window size. mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. qkv_bias (bool,
+ optional): If True, add a learnable bias to query, key, value. Default:
+ True drop (float, optional): Dropout rate. Default: 0.0 attn_drop (float,
+ optional): Attention dropout rate. Default: 0.0 drop_path (float | tuple[
+ float], optional): Stochastic depth rate. Default: 0.0 norm_layer (
+ nn.Module, optional): Normalization layer. Default: nn.LayerNorm
+ downsample (nn.Module | None, optional): Downsample layer at the end of
+ the layer. Default: None use_checkpoint (bool): Whether to use
+ checkpointing to save memory. Default: False. pretrained_window_size (
+ int): Local window size in pre-training.
+ """
+
+ def __init__(self,
+ dim,
+ input_resolution,
+ depth,
+ num_heads,
+ window_size,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ drop=0.,
+ attn_drop=0.,
+ drop_path=0.,
+ norm_layer=nn.LayerNorm,
+ downsample=None,
+ use_checkpoint=False,
+ pretrained_window_size=0):
+
+ super().__init__()
+ self.dim = dim
+ self.input_resolution = input_resolution
+ self.depth = depth
+ self.use_checkpoint = use_checkpoint
+
+ # build blocks
+ self.blocks = nn.ModuleList([
+ SwinTransformerBlock(
+ dim=dim,
+ input_resolution=input_resolution,
+ num_heads=num_heads,
+ window_size=window_size,
+ shift_size=0 if (i % 2 == 0) else window_size // 2,
+ mlp_ratio=mlp_ratio,
+ qkv_bias=qkv_bias,
+ drop=drop,
+ attn_drop=attn_drop,
+ drop_path=drop_path[i]
+ if isinstance(drop_path, list) else drop_path,
+ norm_layer=norm_layer,
+ pretrained_window_size=pretrained_window_size)
+ for i in range(depth)
+ ])
+
+ # patch merging layer
+ if downsample is not None:
+ self.downsample = downsample(
+ input_resolution, dim=dim, norm_layer=norm_layer)
+ else:
+ self.downsample = None
+
+ def forward(self, x):
+ for blk in self.blocks:
+ if self.use_checkpoint:
+ x = checkpoint.checkpoint(blk, x)
+ else:
+ x = blk(x)
+ if self.downsample is not None:
+ x = self.downsample(x)
+ return x
+
+ def extra_repr(self) -> str:
+ return (f'dim={self.dim}, input_resolution={self.input_resolution}, '
+ f'depth={self.depth}')
+
+ def flops(self):
+ flops = 0
+ for blk in self.blocks:
+ flops += blk.flops()
+ if self.downsample is not None:
+ flops += self.downsample.flops()
+ return flops
+
+ def _init_respostnorm(self):
+ for blk in self.blocks:
+ nn.init.constant_(blk.norm1.bias, 0)
+ nn.init.constant_(blk.norm1.weight, 0)
+ nn.init.constant_(blk.norm2.bias, 0)
+ nn.init.constant_(blk.norm2.weight, 0)
+
+
+class PatchEmbed(nn.Module):
+ r""" Image to Patch Embedding
+
+ Args: img_size (int): Image size. Default: 224. patch_size (int): Patch
+ token size. Default: 4. in_chans (int): Number of input image channels.
+ Default: 3. embed_dim (int): Number of linear projection output channels.
+ Default: 96. norm_layer (nn.Module, optional): Normalization layer.
+ Default: None
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ embed_dim=96,
+ norm_layer=None):
+ super().__init__()
+ img_size = to_2tuple(img_size)
+ patch_size = to_2tuple(patch_size)
+ patches_resolution = [
+ img_size[0] // patch_size[0], img_size[1] // patch_size[1]
+ ]
+ self.img_size = img_size
+ self.patch_size = patch_size
+ self.patches_resolution = patches_resolution
+ self.num_patches = patches_resolution[0] * patches_resolution[1]
+
+ self.in_chans = in_chans
+ self.embed_dim = embed_dim
+
+ self.proj = nn.Conv2d(
+ in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
+ if norm_layer is not None:
+ self.norm = norm_layer(embed_dim)
+ else:
+ self.norm = None
+
+ def forward(self, x):
+ B, C, H, W = x.shape
+ # FIXME look at relaxing size constraints
+ assert H == self.img_size[0] and W == self.img_size[1], \
+ (f"Input image size ({H}*{W}) doesn't match model "
+ f'({self.img_size[0]}*{self.img_size[1]}).')
+ x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
+ if self.norm is not None:
+ x = self.norm(x)
+ return x
+
+ def flops(self):
+ Ho, Wo = self.patches_resolution
+ flops = Ho * Wo * self.embed_dim * self.in_chans * (
+ self.patch_size[0] * self.patch_size[1])
+ if self.norm is not None:
+ flops += Ho * Wo * self.embed_dim
+ return flops
+
+
+@BACKBONES.register_module()
+class SwinTransformerV2(nn.Module):
+ r""" Swin Transformer A PyTorch impl of : `Swin Transformer: Hierarchical
+ Vision Transformer using Shifted Windows` -
+ https://arxiv.org/pdf/2103.14030
+
+ Args: img_size (int | tuple(int)): Input image size. Default 224
+ patch_size (int | tuple(int)): Patch size. Default: 4 in_chans (int):
+ Number of input image channels. Default: 3 num_classes (int): Number of
+ classes for classification head. Default: 1000 embed_dim (int): Patch
+ embedding dimension. Default: 96 depths (tuple(int)): Depth of each Swin
+ Transformer layer. num_heads (tuple(int)): Number of attention heads in
+ different layers. window_size (int): Window size. Default: 7 mlp_ratio (
+ float): Ratio of mlp hidden dim to embedding dim. Default: 4 qkv_bias (
+ bool): If True, add a learnable bias to query, key, value. Default: True
+ drop_rate (float): Dropout rate. Default: 0 attn_drop_rate (float):
+ Attention dropout rate. Default: 0 drop_path_rate (float): Stochastic
+ depth rate. Default: 0.1 norm_layer (nn.Module): Normalization layer.
+ Default: nn.LayerNorm. ape (bool): If True, add absolute position
+ embedding to the patch embedding. Default: False patch_norm (bool): If
+ True, add normalization after patch embedding. Default: True
+ use_checkpoint (bool): Whether to use checkpointing to save memory.
+ Default: False pretrained_window_sizes (tuple(int)): Pretrained window
+ sizes of each layer.
+ """
+
+ def __init__(self,
+ img_size=224,
+ patch_size=4,
+ in_chans=3,
+ num_classes=1000,
+ embed_dim=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4.,
+ qkv_bias=True,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.1,
+ norm_layer=nn.LayerNorm,
+ ape=False,
+ patch_norm=True,
+ use_checkpoint=False,
+ pretrained_window_sizes=[0, 0, 0, 0],
+ multi_scale=False,
+ upsample='deconv',
+ **kwargs):
+ super().__init__()
+
+ self.num_classes = num_classes
+ self.num_layers = len(depths)
+ self.embed_dim = embed_dim
+ self.ape = ape
+ self.patch_norm = patch_norm
+ self.num_features = int(embed_dim * 2**(self.num_layers - 1))
+ self.mlp_ratio = mlp_ratio
+
+ # split image into non-overlapping patches
+ self.patch_embed = PatchEmbed(
+ img_size=img_size,
+ patch_size=patch_size,
+ in_chans=in_chans,
+ embed_dim=embed_dim,
+ norm_layer=norm_layer if self.patch_norm else None)
+ num_patches = self.patch_embed.num_patches
+ patches_resolution = self.patch_embed.patches_resolution
+ self.patches_resolution = patches_resolution
+
+ # absolute position embedding
+ if self.ape:
+ self.absolute_pos_embed = nn.Parameter(
+ torch.zeros(1, num_patches, embed_dim))
+ trunc_normal_(self.absolute_pos_embed, std=.02)
+
+ self.pos_drop = nn.Dropout(p=drop_rate)
+
+ # stochastic depth
+ dpr = [
+ x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))
+ ] # stochastic depth decay rule
+
+ # build layers
+ self.layers = nn.ModuleList()
+ for i_layer in range(self.num_layers):
+ layer = BasicLayer(
+ dim=int(embed_dim * 2**i_layer),
+ input_resolution=(patches_resolution[0] // (2**i_layer),
+ patches_resolution[1] // (2**i_layer)),
+ depth=depths[i_layer],
+ num_heads=num_heads[i_layer],
+ window_size=window_size,
+ mlp_ratio=self.mlp_ratio,
+ qkv_bias=qkv_bias,
+ drop=drop_rate,
+ attn_drop=attn_drop_rate,
+ drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],
+ norm_layer=norm_layer,
+ downsample=PatchMerging if
+ (i_layer < self.num_layers - 1) else None,
+ use_checkpoint=use_checkpoint,
+ pretrained_window_size=pretrained_window_sizes[i_layer])
+ self.layers.append(layer)
+
+ self.norm = norm_layer(self.num_features)
+ self.avgpool = nn.AdaptiveAvgPool1d(1)
+ self.multi_scale = multi_scale
+ if self.multi_scale:
+ self.scales = [1, 2, 4, 4]
+ self.upsample = nn.ModuleList()
+ features = [
+ int(embed_dim * 2**i) for i in range(1, self.num_layers)
+ ] + [self.num_features]
+ self.multi_scale_fuse = nn.Conv2d(
+ sum(features), self.num_features, 1)
+ for i in range(self.num_layers):
+ self.upsample.append(nn.Upsample(scale_factor=self.scales[i]))
+ else:
+ if upsample == 'deconv':
+ self.upsample = nn.ConvTranspose2d(
+ self.num_features, self.num_features, 2, stride=2)
+ elif upsample == 'new_deconv':
+ self.upsample = nn.Sequential(
+ nn.Upsample(
+ scale_factor=2, mode='bilinear', align_corners=False),
+ nn.Conv2d(
+ self.num_features,
+ self.num_features,
+ 3,
+ stride=1,
+ padding=1), nn.BatchNorm2d(self.num_features),
+ nn.ReLU(inplace=True))
+ elif upsample == 'new_deconv2':
+ self.upsample = nn.Sequential(
+ nn.Upsample(scale_factor=2),
+ nn.Conv2d(
+ self.num_features,
+ self.num_features,
+ 3,
+ stride=1,
+ padding=1), nn.BatchNorm2d(self.num_features),
+ nn.ReLU(inplace=True))
+ elif upsample == 'bilinear':
+ self.upsample = nn.Upsample(
+ scale_factor=2, mode='bilinear', align_corners=False)
+ else:
+ self.upsample = nn.Identity()
+ self.head = nn.Linear(
+ self.num_features,
+ num_classes) if num_classes > 0 else nn.Identity()
+
+ self.apply(self._init_weights)
+ for bly in self.layers:
+ bly._init_respostnorm()
+
+ def _init_weights(self, m):
+ if isinstance(m, nn.Linear):
+ trunc_normal_(m.weight, std=.02)
+ if isinstance(m, nn.Linear) and m.bias is not None:
+ nn.init.constant_(m.bias, 0)
+ elif isinstance(m, nn.LayerNorm):
+ nn.init.constant_(m.bias, 0)
+ nn.init.constant_(m.weight, 1.0)
+
+ @torch.jit.ignore
+ def no_weight_decay(self):
+ return {'absolute_pos_embed'}
+
+ @torch.jit.ignore
+ def no_weight_decay_keywords(self):
+ return {'cpb_mlp', 'logit_scale', 'relative_position_bias_table'}
+
+ def forward_features(self, x):
+ B, C, H, W = x.shape
+ x = self.patch_embed(x)
+ if self.ape:
+ x = x + self.absolute_pos_embed
+ x = self.pos_drop(x)
+
+ if self.multi_scale:
+ # x_2d = x.view(B, H // 4, W // 4, -1).permute(0, 3, 1, 2) # B C
+ # H W features = [self.upsample[0](x_2d)]
+ features = []
+ for i, layer in enumerate(self.layers):
+ x = layer(x)
+ x_2d = x.view(B, H // (8 * self.scales[i]),
+ W // (8 * self.scales[i]),
+ -1).permute(0, 3, 1, 2) # B C H W
+ features.append(self.upsample[i](x_2d))
+ x = torch.cat(features, dim=1)
+ x = self.multi_scale_fuse(x)
+ x = x.view(B, self.num_features, -1).permute(0, 2, 1)
+ x = self.norm(x) # B L C
+ x = x.view(B, H // 8, W // 8,
+ self.num_features).permute(0, 3, 1, 2) # B C H W
+
+ else:
+ for layer in self.layers:
+ x = layer(x)
+ x = self.norm(x) # B L C
+ x = x.view(B, H // 32, W // 32,
+ self.num_features).permute(0, 3, 1, 2) # B C H W
+ x = self.upsample(x)
+
+ return x
+
+ def forward(self, x):
+ x = self.forward_features(x)
+ x = self.head(x)
+ return x
+
+ def flops(self):
+ flops = 0
+ flops += self.patch_embed.flops()
+ for i, layer in enumerate(self.layers):
+ flops += layer.flops()
+ flops += self.num_features * self.patches_resolution[
+ 0] * self.patches_resolution[1] // (2**self.num_layers)
+ flops += self.num_features * self.num_classes
+ return flops
diff --git a/projects/pose_anything/models/backbones/swin_utils.py b/projects/pose_anything/models/backbones/swin_utils.py
new file mode 100644
index 0000000000000000000000000000000000000000..f53c9284487b7249667e7018547e10094820ba54
--- /dev/null
+++ b/projects/pose_anything/models/backbones/swin_utils.py
@@ -0,0 +1,127 @@
+# --------------------------------------------------------
+# SimMIM
+# Copyright (c) 2021 Microsoft
+# Licensed under The MIT License [see LICENSE for details]
+# Written by Ze Liu
+# Modified by Zhenda Xie
+# --------------------------------------------------------
+
+import numpy as np
+import torch
+from scipy import interpolate
+
+
+def load_pretrained(config, model, logger):
+ checkpoint = torch.load(config, map_location='cpu')
+ ckpt_model = checkpoint['model']
+ if any([True if 'encoder.' in k else False for k in ckpt_model.keys()]):
+ ckpt_model = {
+ k.replace('encoder.', ''): v
+ for k, v in ckpt_model.items() if k.startswith('encoder.')
+ }
+ print('Detect pre-trained model, remove [encoder.] prefix.')
+ else:
+ print('Detect non-pre-trained model, pass without doing anything.')
+
+ checkpoint = remap_pretrained_keys_swin(model, ckpt_model, logger)
+ msg = model.load_state_dict(ckpt_model, strict=False)
+ print(msg)
+
+ del checkpoint
+ torch.cuda.empty_cache()
+
+
+def remap_pretrained_keys_swin(model, checkpoint_model, logger):
+ state_dict = model.state_dict()
+
+ # Geometric interpolation when pre-trained patch size mismatch with
+ # fine-tuned patch size
+ all_keys = list(checkpoint_model.keys())
+ for key in all_keys:
+ if 'relative_position_bias_table' in key:
+ relative_position_bias_table_pretrained = checkpoint_model[key]
+ relative_position_bias_table_current = state_dict[key]
+ L1, nH1 = relative_position_bias_table_pretrained.size()
+ L2, nH2 = relative_position_bias_table_current.size()
+ if nH1 != nH2:
+ print(f'Error in loading {key}, passing......')
+ else:
+ if L1 != L2:
+ print(f'{key}: Interpolate relative_position_bias_table '
+ f'using geo.')
+ src_size = int(L1**0.5)
+ dst_size = int(L2**0.5)
+
+ def geometric_progression(a, r, n):
+ return a * (1.0 - r**n) / (1.0 - r)
+
+ left, right = 1.01, 1.5
+ while right - left > 1e-6:
+ q = (left + right) / 2.0
+ gp = geometric_progression(1, q, src_size // 2)
+ if gp > dst_size // 2:
+ right = q
+ else:
+ left = q
+
+ # if q > 1.090307:
+ # q = 1.090307
+
+ dis = []
+ cur = 1
+ for i in range(src_size // 2):
+ dis.append(cur)
+ cur += q**(i + 1)
+
+ r_ids = [-_ for _ in reversed(dis)]
+
+ x = r_ids + [0] + dis
+ y = r_ids + [0] + dis
+
+ t = dst_size // 2.0
+ dx = np.arange(-t, t + 0.1, 1.0)
+ dy = np.arange(-t, t + 0.1, 1.0)
+
+ print('Original positions = %s' % str(x))
+ print('Target positions = %s' % str(dx))
+
+ all_rel_pos_bias = []
+
+ for i in range(nH1):
+ z = relative_position_bias_table_pretrained[:, i].view(
+ src_size, src_size).float().numpy()
+ f_cubic = interpolate.interp2d(x, y, z, kind='cubic')
+ all_rel_pos_bias.append(
+ torch.Tensor(f_cubic(dx,
+ dy)).contiguous().view(-1, 1).
+ to(relative_position_bias_table_pretrained.device))
+
+ new_rel_pos_bias = torch.cat(all_rel_pos_bias, dim=-1)
+ checkpoint_model[key] = new_rel_pos_bias
+
+ # delete relative_position_index since we always re-init it
+ relative_position_index_keys = [
+ k for k in checkpoint_model.keys() if 'relative_position_index' in k
+ ]
+ for k in relative_position_index_keys:
+ del checkpoint_model[k]
+
+ # delete relative_coords_table since we always re-init it
+ relative_coords_table_keys = [
+ k for k in checkpoint_model.keys() if 'relative_coords_table' in k
+ ]
+ for k in relative_coords_table_keys:
+ del checkpoint_model[k]
+
+ # re-map keys due to name change
+ rpe_mlp_keys = [k for k in checkpoint_model.keys() if 'rpe_mlp' in k]
+ for k in rpe_mlp_keys:
+ checkpoint_model[k.replace('rpe_mlp',
+ 'cpb_mlp')] = checkpoint_model.pop(k)
+
+ # delete attn_mask since we always re-init it
+ attn_mask_keys = [k for k in checkpoint_model.keys() if 'attn_mask' in k]
+ for k in attn_mask_keys:
+ del checkpoint_model[k]
+
+ return checkpoint_model
diff --git a/projects/pose_anything/models/detectors/__init__.py b/projects/pose_anything/models/detectors/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..038450a700175662ed8fc1e92c67b4cdcae54cd1
--- /dev/null
+++ b/projects/pose_anything/models/detectors/__init__.py
@@ -0,0 +1,3 @@
+from .pam import PoseAnythingModel
+
+__all__ = ['PoseAnythingModel']
diff --git a/projects/pose_anything/models/detectors/pam.py b/projects/pose_anything/models/detectors/pam.py
new file mode 100644
index 0000000000000000000000000000000000000000..0ce1b246736c801b920cadec90e02c59f30cd97d
--- /dev/null
+++ b/projects/pose_anything/models/detectors/pam.py
@@ -0,0 +1,395 @@
+import math
+from abc import ABCMeta
+
+import cv2
+import mmcv
+import numpy as np
+import torch
+from mmcv import imshow, imwrite
+from mmengine.model import BaseModel
+
+from mmpose.models import builder
+from mmpose.registry import MODELS
+from ..backbones.swin_utils import load_pretrained
+
+
+@MODELS.register_module()
+class PoseAnythingModel(BaseModel, metaclass=ABCMeta):
+ """Few-shot keypoint detectors.
+
+ Args:
+ keypoint_head (dict): Keypoint head to process feature.
+ encoder_config (dict): Config for encoder. Default: None.
+ pretrained (str): Path to the pretrained models.
+ train_cfg (dict): Config for training. Default: None.
+ test_cfg (dict): Config for testing. Default: None.
+ """
+
+ def __init__(self,
+ keypoint_head,
+ encoder_config,
+ pretrained=False,
+ train_cfg=None,
+ test_cfg=None):
+ super().__init__()
+ self.backbone, self.backbone_type = self.init_backbone(
+ pretrained, encoder_config)
+ self.keypoint_head = builder.build_head(keypoint_head)
+ self.keypoint_head.init_weights()
+ self.train_cfg = train_cfg
+ self.test_cfg = test_cfg
+ self.target_type = test_cfg.get('target_type',
+ 'GaussianHeatMap') # GaussianHeatMap
+
+ def init_backbone(self, pretrained, encoder_config):
+ if 'swin' in pretrained:
+ encoder_sample = builder.build_backbone(encoder_config)
+ if '.pth' in pretrained:
+ load_pretrained(pretrained, encoder_sample, logger=None)
+ backbone = 'swin'
+ elif 'dino' in pretrained:
+ if 'dinov2' in pretrained:
+ repo = 'facebookresearch/dinov2'
+ backbone = 'dinov2'
+ else:
+ repo = 'facebookresearch/dino:main'
+ backbone = 'dino'
+ encoder_sample = torch.hub.load(repo, pretrained)
+ elif 'resnet' in pretrained:
+ pretrained = 'torchvision://resnet50'
+ encoder_config = dict(type='ResNet', depth=50, out_indices=(3, ))
+ encoder_sample = builder.build_backbone(encoder_config)
+ encoder_sample.init_weights(pretrained)
+ backbone = 'resnet50'
+ else:
+ raise NotImplementedError(f'backbone {pretrained} not supported')
+ return encoder_sample, backbone
+
+ @property
+ def with_keypoint(self):
+ """Check if has keypoint_head."""
+ return hasattr(self, 'keypoint_head')
+
+ def init_weights(self, pretrained=None):
+ """Weight initialization for model."""
+ self.backbone.init_weights(pretrained)
+ self.encoder_query.init_weights(pretrained)
+ self.keypoint_head.init_weights()
+
+ def forward(self,
+ img_s,
+ img_q,
+ target_s=None,
+ target_weight_s=None,
+ target_q=None,
+ target_weight_q=None,
+ img_metas=None,
+ return_loss=True,
+ **kwargs):
+ """Defines the computation performed at every call."""
+
+ if return_loss:
+ return self.forward_train(img_s, target_s, target_weight_s, img_q,
+ target_q, target_weight_q, img_metas,
+ **kwargs)
+ else:
+ return self.forward_test(img_s, target_s, target_weight_s, img_q,
+ target_q, target_weight_q, img_metas,
+ **kwargs)
+
+ def forward_dummy(self, img_s, target_s, target_weight_s, img_q, target_q,
+ target_weight_q, img_metas, **kwargs):
+ return self.predict(img_s, target_s, target_weight_s, img_q, img_metas)
+
+ def forward_train(self, img_s, target_s, target_weight_s, img_q, target_q,
+ target_weight_q, img_metas, **kwargs):
+ """Defines the computation performed at every call when training."""
+ bs, _, h, w = img_q.shape
+
+ output, initial_proposals, similarity_map, mask_s = self.predict(
+ img_s, target_s, target_weight_s, img_q, img_metas)
+
+ # parse the img meta to get the target keypoints
+ target_keypoints = self.parse_keypoints_from_img_meta(
+ img_metas, output.device, keyword='query')
+ target_sizes = torch.tensor([img_q.shape[-2],
+ img_q.shape[-1]]).unsqueeze(0).repeat(
+ img_q.shape[0], 1, 1)
+
+ # if return loss
+ losses = dict()
+ if self.with_keypoint:
+ keypoint_losses = self.keypoint_head.get_loss(
+ output, initial_proposals, similarity_map, target_keypoints,
+ target_q, target_weight_q * mask_s, target_sizes)
+ losses.update(keypoint_losses)
+ keypoint_accuracy = self.keypoint_head.get_accuracy(
+ output[-1],
+ target_keypoints,
+ target_weight_q * mask_s,
+ target_sizes,
+ height=h)
+ losses.update(keypoint_accuracy)
+
+ return losses
+
+ def forward_test(self,
+ img_s,
+ target_s,
+ target_weight_s,
+ img_q,
+ target_q,
+ target_weight_q,
+ img_metas=None,
+ **kwargs):
+ """Defines the computation performed at every call when testing."""
+ batch_size, _, img_height, img_width = img_q.shape
+
+ output, initial_proposals, similarity_map, _ = self.predict(
+ img_s, target_s, target_weight_s, img_q, img_metas)
+ predicted_pose = output[-1].detach().cpu().numpy(
+ ) # [bs, num_query, 2]
+
+ result = {}
+ if self.with_keypoint:
+ keypoint_result = self.keypoint_head.decode(
+ img_metas, predicted_pose, img_size=[img_width, img_height])
+ result.update(keypoint_result)
+
+ result.update({
+ 'points':
+ torch.cat((initial_proposals, output.squeeze(1)),
+ dim=0).cpu().numpy()
+ })
+ result.update({'sample_image_file': img_metas[0]['sample_image_file']})
+
+ return result
+
+ def predict(self, img_s, target_s, target_weight_s, img_q, img_metas=None):
+
+ batch_size, _, img_height, img_width = img_q.shape
+ assert [
+ i['sample_skeleton'][0] != i['query_skeleton'] for i in img_metas
+ ]
+ skeleton = [i['sample_skeleton'][0] for i in img_metas]
+
+ feature_q, feature_s = self.extract_features(img_s, img_q)
+
+ mask_s = target_weight_s[0]
+ for target_weight in target_weight_s:
+ mask_s = mask_s * target_weight
+
+ output, initial_proposals, similarity_map = self.keypoint_head(
+ feature_q, feature_s, target_s, mask_s, skeleton)
+
+ return output, initial_proposals, similarity_map, mask_s
+
+ def extract_features(self, img_s, img_q):
+ if self.backbone_type == 'swin':
+ feature_q = self.backbone.forward_features(img_q) # [bs, C, h, w]
+ feature_s = [self.backbone.forward_features(img) for img in img_s]
+ elif self.backbone_type == 'dino':
+ batch_size, _, img_height, img_width = img_q.shape
+ feature_q = self.backbone.get_intermediate_layers(img_q, n=1)
+ ([0][:, 1:].reshape(batch_size, img_height // 8, img_width // 8,
+ -1).permute(0, 3, 1, 2)) # [bs, 3, h, w]
+ feature_s = [
+ self.backbone.get_intermediate_layers(
+ img, n=1)[0][:, 1:].reshape(batch_size, img_height // 8,
+ img_width // 8,
+ -1).permute(0, 3, 1, 2)
+ for img in img_s
+ ]
+ elif self.backbone_type == 'dinov2':
+ batch_size, _, img_height, img_width = img_q.shape
+ feature_q = self.backbone.get_intermediate_layers(
+ img_q, n=1, reshape=True)[0] # [bs, c, h, w]
+ feature_s = [
+ self.backbone.get_intermediate_layers(img, n=1,
+ reshape=True)[0]
+ for img in img_s
+ ]
+ else:
+ feature_s = [self.backbone(img) for img in img_s]
+ feature_q = self.encoder_query(img_q)
+
+ return feature_q, feature_s
+
+ def parse_keypoints_from_img_meta(self, img_meta, device, keyword='query'):
+ """Parse keypoints from the img_meta.
+
+ Args:
+ img_meta (dict): Image meta info.
+ device (torch.device): Device of the output keypoints.
+ keyword (str): 'query' or 'sample'. Default: 'query'.
+
+ Returns:
+ Tensor: Keypoints coordinates of query images.
+ """
+
+ if keyword == 'query':
+ query_kpt = torch.stack([
+ torch.tensor(info[f'{keyword}_joints_3d']).to(device)
+ for info in img_meta
+ ],
+ dim=0)[:, :, :2] # [bs, num_query, 2]
+ else:
+ query_kpt = []
+ for info in img_meta:
+ if isinstance(info[f'{keyword}_joints_3d'][0], torch.Tensor):
+ samples = torch.stack(info[f'{keyword}_joints_3d'])
+ else:
+ samples = np.array(info[f'{keyword}_joints_3d'])
+ query_kpt.append(torch.tensor(samples).to(device)[:, :, :2])
+ query_kpt = torch.stack(
+ query_kpt, dim=0) # [bs, , num_samples, num_query, 2]
+ return query_kpt
+
+ # UNMODIFIED
+ def show_result(self,
+ img,
+ result,
+ skeleton=None,
+ kpt_score_thr=0.3,
+ bbox_color='green',
+ pose_kpt_color=None,
+ pose_limb_color=None,
+ radius=4,
+ text_color=(255, 0, 0),
+ thickness=1,
+ font_scale=0.5,
+ win_name='',
+ show=False,
+ wait_time=0,
+ out_file=None):
+ """Draw `result` over `img`.
+
+ Args:
+ img (str or Tensor): The image to be displayed.
+ result (list[dict]): The results to draw over `img`
+ (bbox_result, pose_result).
+ kpt_score_thr (float, optional): Minimum score of keypoints
+ to be shown. Default: 0.3.
+ bbox_color (str or tuple or :obj:`Color`): Color of bbox lines.
+ pose_kpt_color (np.array[Nx3]`): Color of N keypoints.
+ If None, do not draw keypoints.
+ pose_limb_color (np.array[Mx3]): Color of M limbs.
+ If None, do not draw limbs.
+ text_color (str or tuple or :obj:`Color`): Color of texts.
+ thickness (int): Thickness of lines.
+ font_scale (float): Font scales of texts.
+ win_name (str): The window name.
+ wait_time (int): Value of waitKey param.
+ Default: 0.
+ out_file (str or None): The filename to write the image.
+ Default: None.
+
+ Returns:
+ Tensor: Visualized img, only if not `show` or `out_file`.
+ """
+
+ img = mmcv.imread(img)
+ img = img.copy()
+ img_h, img_w, _ = img.shape
+
+ bbox_result = []
+ pose_result = []
+ for res in result:
+ bbox_result.append(res['bbox'])
+ pose_result.append(res['keypoints'])
+
+ if len(bbox_result) > 0:
+ bboxes = np.vstack(bbox_result)
+ # draw bounding boxes
+ mmcv.imshow_bboxes(
+ img,
+ bboxes,
+ colors=bbox_color,
+ top_k=-1,
+ thickness=thickness,
+ show=False,
+ win_name=win_name,
+ wait_time=wait_time,
+ out_file=None)
+
+ for person_id, kpts in enumerate(pose_result):
+ # draw each point on image
+ if pose_kpt_color is not None:
+ assert len(pose_kpt_color) == len(kpts), (
+ len(pose_kpt_color), len(kpts))
+ for kid, kpt in enumerate(kpts):
+ x_coord, y_coord, kpt_score = int(kpt[0]), int(
+ kpt[1]), kpt[2]
+ if kpt_score > kpt_score_thr:
+ img_copy = img.copy()
+ r, g, b = pose_kpt_color[kid]
+ cv2.circle(img_copy, (int(x_coord), int(y_coord)),
+ radius, (int(r), int(g), int(b)), -1)
+ transparency = max(0, min(1, kpt_score))
+ cv2.addWeighted(
+ img_copy,
+ transparency,
+ img,
+ 1 - transparency,
+ 0,
+ dst=img)
+
+ # draw limbs
+ if skeleton is not None and pose_limb_color is not None:
+ assert len(pose_limb_color) == len(skeleton)
+ for sk_id, sk in enumerate(skeleton):
+ pos1 = (int(kpts[sk[0] - 1, 0]), int(kpts[sk[0] - 1,
+ 1]))
+ pos2 = (int(kpts[sk[1] - 1, 0]), int(kpts[sk[1] - 1,
+ 1]))
+ if (0 < pos1[0] < img_w and 0 < pos1[1] < img_h
+ and 0 < pos2[0] < img_w and 0 < pos2[1] < img_h
+ and kpts[sk[0] - 1, 2] > kpt_score_thr
+ and kpts[sk[1] - 1, 2] > kpt_score_thr):
+ img_copy = img.copy()
+ X = (pos1[0], pos2[0])
+ Y = (pos1[1], pos2[1])
+ mX = np.mean(X)
+ mY = np.mean(Y)
+ length = ((Y[0] - Y[1])**2 + (X[0] - X[1])**2)**0.5
+ angle = math.degrees(
+ math.atan2(Y[0] - Y[1], X[0] - X[1]))
+ stickwidth = 2
+ polygon = cv2.ellipse2Poly(
+ (int(mX), int(mY)),
+ (int(length / 2), int(stickwidth)), int(angle),
+ 0, 360, 1)
+
+ r, g, b = pose_limb_color[sk_id]
+ cv2.fillConvexPoly(img_copy, polygon,
+ (int(r), int(g), int(b)))
+ transparency = max(
+ 0,
+ min(
+ 1, 0.5 *
+ (kpts[sk[0] - 1, 2] + kpts[sk[1] - 1, 2])))
+ cv2.addWeighted(
+ img_copy,
+ transparency,
+ img,
+ 1 - transparency,
+ 0,
+ dst=img)
+
+ show, wait_time = 1, 1
+ if show:
+ height, width = img.shape[:2]
+ max_ = max(height, width)
+
+ factor = min(1, 800 / max_)
+ enlarge = cv2.resize(
+ img, (0, 0),
+ fx=factor,
+ fy=factor,
+ interpolation=cv2.INTER_CUBIC)
+ imshow(enlarge, win_name, wait_time)
+
+ if out_file is not None:
+ imwrite(img, out_file)
+
+ return img
diff --git a/projects/pose_anything/models/keypoint_heads/__init__.py b/projects/pose_anything/models/keypoint_heads/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..b42289e92a1e7a99103a2e532a41e107b68589d3
--- /dev/null
+++ b/projects/pose_anything/models/keypoint_heads/__init__.py
@@ -0,0 +1,3 @@
+from .head import PoseHead
+
+__all__ = ['PoseHead']
diff --git a/projects/pose_anything/models/keypoint_heads/head.py b/projects/pose_anything/models/keypoint_heads/head.py
new file mode 100644
index 0000000000000000000000000000000000000000..f565a635803823f5ae136f4b3d62e7e0ad2fc10a
--- /dev/null
+++ b/projects/pose_anything/models/keypoint_heads/head.py
@@ -0,0 +1,438 @@
+from copy import deepcopy
+
+import numpy as np
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from mmcv.cnn import Conv2d, Linear
+from mmengine.model import xavier_init
+from models.utils import build_positional_encoding, build_transformer
+
+# from mmcv.cnn.bricks.transformer import build_positional_encoding
+from mmpose.evaluation import keypoint_pck_accuracy
+from mmpose.models import HEADS
+from mmpose.models.utils.ops import resize
+
+
+def transform_preds(coords, center, scale, output_size, use_udp=False):
+ """Get final keypoint predictions from heatmaps and apply scaling and
+ translation to map them back to the image.
+
+ Note:
+ num_keypoints: K
+
+ Args:
+ coords (np.ndarray[K, ndims]):
+
+ * If ndims=2, corrds are predicted keypoint location.
+ * If ndims=4, corrds are composed of (x, y, scores, tags)
+ * If ndims=5, corrds are composed of (x, y, scores, tags,
+ flipped_tags)
+
+ center (np.ndarray[2, ]): Center of the bounding box (x, y).
+ scale (np.ndarray[2, ]): Scale of the bounding box
+ wrt [width, height].
+ output_size (np.ndarray[2, ] | list(2,)): Size of the
+ destination heatmaps.
+ use_udp (bool): Use unbiased data processing
+
+ Returns:
+ np.ndarray: Predicted coordinates in the images.
+ """
+ assert coords.shape[1] in (2, 4, 5)
+ assert len(center) == 2
+ assert len(scale) == 2
+ assert len(output_size) == 2
+
+ # Recover the scale which is normalized by a factor of 200.
+ scale = scale * 200.0
+
+ if use_udp:
+ scale_x = scale[0] / (output_size[0] - 1.0)
+ scale_y = scale[1] / (output_size[1] - 1.0)
+ else:
+ scale_x = scale[0] / output_size[0]
+ scale_y = scale[1] / output_size[1]
+
+ target_coords = coords.copy()
+ target_coords[:, 0] = coords[:, 0] * scale_x + center[0] - scale[0] * 0.5
+ target_coords[:, 1] = coords[:, 1] * scale_y + center[1] - scale[1] * 0.5
+
+ return target_coords
+
+
+def inverse_sigmoid(x, eps=1e-3):
+ x = x.clamp(min=0, max=1)
+ x1 = x.clamp(min=eps)
+ x2 = (1 - x).clamp(min=eps)
+ return torch.log(x1 / x2)
+
+
+class TokenDecodeMLP(nn.Module):
+ """The MLP used to predict coordinates from the support keypoints
+ tokens."""
+
+ def __init__(self,
+ in_channels,
+ hidden_channels,
+ out_channels=2,
+ num_layers=3):
+ super(TokenDecodeMLP, self).__init__()
+ layers = []
+ for i in range(num_layers):
+ if i == 0:
+ layers.append(nn.Linear(in_channels, hidden_channels))
+ layers.append(nn.GELU())
+ else:
+ layers.append(nn.Linear(hidden_channels, hidden_channels))
+ layers.append(nn.GELU())
+ layers.append(nn.Linear(hidden_channels, out_channels))
+ self.mlp = nn.Sequential(*layers)
+
+ def forward(self, x):
+ return self.mlp(x)
+
+
+@HEADS.register_module()
+class PoseHead(nn.Module):
+ """In two stage regression A3, the proposal generator are moved into
+ transformer.
+
+ All valid proposals will be added with an positional embedding to better
+ regress the location
+ """
+
+ def __init__(self,
+ in_channels,
+ transformer=None,
+ positional_encoding=dict(
+ type='SinePositionalEncoding',
+ num_feats=128,
+ normalize=True),
+ encoder_positional_encoding=dict(
+ type='SinePositionalEncoding',
+ num_feats=512,
+ normalize=True),
+ share_kpt_branch=False,
+ num_decoder_layer=3,
+ with_heatmap_loss=False,
+ with_bb_loss=False,
+ bb_temperature=0.2,
+ heatmap_loss_weight=2.0,
+ support_order_dropout=-1,
+ extra=None,
+ train_cfg=None,
+ test_cfg=None):
+ super().__init__()
+
+ self.in_channels = in_channels
+ self.positional_encoding = build_positional_encoding(
+ positional_encoding)
+ self.encoder_positional_encoding = build_positional_encoding(
+ encoder_positional_encoding)
+ self.transformer = build_transformer(transformer)
+ self.embed_dims = self.transformer.d_model
+ self.with_heatmap_loss = with_heatmap_loss
+ self.with_bb_loss = with_bb_loss
+ self.bb_temperature = bb_temperature
+ self.heatmap_loss_weight = heatmap_loss_weight
+ self.support_order_dropout = support_order_dropout
+
+ assert 'num_feats' in positional_encoding
+ num_feats = positional_encoding['num_feats']
+ assert num_feats * 2 == self.embed_dims, 'embed_dims should' \
+ (f' be exactly 2 times of '
+ f'num_feats. Found'
+ f' {self.embed_dims} '
+ f'and {num_feats}.')
+ if extra is not None and not isinstance(extra, dict):
+ raise TypeError('extra should be dict or None.')
+ """Initialize layers of the transformer head."""
+ self.input_proj = Conv2d(
+ self.in_channels, self.embed_dims, kernel_size=1)
+ self.query_proj = Linear(self.in_channels, self.embed_dims)
+ # Instantiate the proposal generator and subsequent keypoint branch.
+ kpt_branch = TokenDecodeMLP(
+ in_channels=self.embed_dims, hidden_channels=self.embed_dims)
+ if share_kpt_branch:
+ self.kpt_branch = nn.ModuleList(
+ [kpt_branch for i in range(num_decoder_layer)])
+ else:
+ self.kpt_branch = nn.ModuleList(
+ [deepcopy(kpt_branch) for i in range(num_decoder_layer)])
+
+ self.train_cfg = {} if train_cfg is None else train_cfg
+ self.test_cfg = {} if test_cfg is None else test_cfg
+ self.target_type = self.test_cfg.get('target_type', 'GaussianHeatMap')
+
+ def init_weights(self):
+ for m in self.modules():
+ if hasattr(m, 'weight') and m.weight.dim() > 1:
+ xavier_init(m, distribution='uniform')
+ """Initialize weights of the transformer head."""
+ # The initialization for transformer is important
+ self.transformer.init_weights()
+ # initialization for input_proj & prediction head
+ for mlp in self.kpt_branch:
+ nn.init.constant_(mlp.mlp[-1].weight.data, 0)
+ nn.init.constant_(mlp.mlp[-1].bias.data, 0)
+ nn.init.xavier_uniform_(self.input_proj.weight, gain=1)
+ nn.init.constant_(self.input_proj.bias, 0)
+
+ nn.init.xavier_uniform_(self.query_proj.weight, gain=1)
+ nn.init.constant_(self.query_proj.bias, 0)
+
+ def forward(self, x, feature_s, target_s, mask_s, skeleton):
+ """"Forward function for a single feature level.
+
+ Args:
+ x (Tensor): Input feature from backbone's single stage, shape
+ [bs, c, h, w].
+
+ Returns:
+ all_cls_scores (Tensor): Outputs from the classification head,
+ shape [nb_dec, bs, num_query, cls_out_channels]. Note
+ cls_out_channels should includes background.
+ all_bbox_preds (Tensor): Sigmoid outputs from the regression
+ head with normalized coordinate format (cx, cy, w, h).
+ Shape [nb_dec, bs, num_query, 4].
+ """
+ # construct binary masks which used for the transformer.
+ # NOTE following the official DETR repo, non-zero values representing
+ # ignored positions, while zero values means valid positions.
+
+ # process query image feature
+ x = self.input_proj(x)
+ bs, dim, h, w = x.shape
+
+ # Disable the support keypoint positional embedding
+ support_order_embedding = x.new_zeros(
+ (bs, self.embed_dims, 1, target_s[0].shape[1])).to(torch.bool)
+
+ # Feature map pos embedding
+ masks = x.new_zeros(
+ (x.shape[0], x.shape[2], x.shape[3])).to(torch.bool)
+ pos_embed = self.positional_encoding(masks)
+
+ # process keypoint token feature
+ query_embed_list = []
+ for i, (feature, target) in enumerate(zip(feature_s, target_s)):
+ # resize the support feature back to the heatmap sizes.
+ resized_feature = resize(
+ input=feature,
+ size=target.shape[-2:],
+ mode='bilinear',
+ align_corners=False)
+ target = target / (
+ target.sum(dim=-1).sum(dim=-1)[:, :, None, None] + 1e-8)
+ support_keypoints = target.flatten(2) @ resized_feature.flatten(
+ 2).permute(0, 2, 1)
+ query_embed_list.append(support_keypoints)
+
+ support_keypoints = torch.mean(torch.stack(query_embed_list, dim=0), 0)
+ support_keypoints = support_keypoints * mask_s
+ support_keypoints = self.query_proj(support_keypoints)
+ masks_query = (~mask_s.to(torch.bool)).squeeze(
+ -1) # True indicating this query matched no actual joints.
+
+ # outs_dec: [nb_dec, bs, num_query, c]
+ # memory: [bs, c, h, w]
+ # x = Query image feature,
+ # support_keypoints = Support keypoint feature
+ outs_dec, initial_proposals, out_points, similarity_map = (
+ self.transformer(x, masks, support_keypoints, pos_embed,
+ support_order_embedding, masks_query,
+ self.positional_encoding, self.kpt_branch,
+ skeleton))
+
+ output_kpts = []
+ for idx in range(outs_dec.shape[0]):
+ layer_delta_unsig = self.kpt_branch[idx](outs_dec[idx])
+ layer_outputs_unsig = layer_delta_unsig + inverse_sigmoid(
+ out_points[idx])
+ output_kpts.append(layer_outputs_unsig.sigmoid())
+
+ return torch.stack(
+ output_kpts, dim=0), initial_proposals, similarity_map
+
+ def get_loss(self, output, initial_proposals, similarity_map, target,
+ target_heatmap, target_weight, target_sizes):
+ # Calculate top-down keypoint loss.
+ losses = dict()
+ # denormalize the predicted coordinates.
+ num_dec_layer, bs, nq = output.shape[:3]
+ target_sizes = target_sizes.to(output.device) # [bs, 1, 2]
+ target = target / target_sizes
+ target = target[None, :, :, :].repeat(num_dec_layer, 1, 1, 1)
+
+ # set the weight for unset query point to be zero
+ normalizer = target_weight.squeeze(dim=-1).sum(dim=-1) # [bs, ]
+ normalizer[normalizer == 0] = 1
+
+ # compute the heatmap loss
+ if self.with_heatmap_loss:
+ losses['heatmap_loss'] = self.heatmap_loss(
+ similarity_map, target_heatmap, target_weight,
+ normalizer) * self.heatmap_loss_weight
+
+ # compute l1 loss for initial_proposals
+ proposal_l1_loss = F.l1_loss(
+ initial_proposals, target[0], reduction='none')
+ proposal_l1_loss = proposal_l1_loss.sum(
+ dim=-1, keepdim=False) * target_weight.squeeze(dim=-1)
+ proposal_l1_loss = proposal_l1_loss.sum(
+ dim=-1, keepdim=False) / normalizer # [bs, ]
+ losses['proposal_loss'] = proposal_l1_loss.sum() / bs
+
+ # compute l1 loss for each layer
+ for idx in range(num_dec_layer):
+ layer_output, layer_target = output[idx], target[idx]
+ l1_loss = F.l1_loss(
+ layer_output, layer_target, reduction='none') # [bs, query, 2]
+ l1_loss = l1_loss.sum(
+ dim=-1, keepdim=False) * target_weight.squeeze(
+ dim=-1) # [bs, query]
+ # normalize the loss for each sample with the number of visible
+ # joints
+ l1_loss = l1_loss.sum(dim=-1, keepdim=False) / normalizer # [bs, ]
+ losses['l1_loss' + '_layer' + str(idx)] = l1_loss.sum() / bs
+
+ return losses
+
+ def get_max_coords(self, heatmap, heatmap_size=64):
+ B, C, H, W = heatmap.shape
+ heatmap = heatmap.view(B, C, -1)
+ max_cor = heatmap.argmax(dim=2)
+ row, col = torch.floor(max_cor / heatmap_size), max_cor % heatmap_size
+ support_joints = torch.cat((row.unsqueeze(-1), col.unsqueeze(-1)),
+ dim=-1)
+ return support_joints
+
+ def heatmap_loss(self, similarity_map, target_heatmap, target_weight,
+ normalizer):
+ # similarity_map: [bs, num_query, h, w]
+ # target_heatmap: [bs, num_query, sh, sw]
+ # target_weight: [bs, num_query, 1]
+
+ # preprocess the similarity_map
+ h, w = similarity_map.shape[-2:]
+ # similarity_map = torch.clamp(similarity_map, 0.0, None)
+ similarity_map = similarity_map.sigmoid()
+
+ target_heatmap = F.interpolate(
+ target_heatmap, size=(h, w), mode='bilinear')
+ target_heatmap = (target_heatmap /
+ (target_heatmap.max(dim=-1)[0].max(dim=-1)[0] +
+ 1e-10)[:, :, None, None]
+ ) # make sure sum of each query is 1
+
+ l2_loss = F.mse_loss(
+ similarity_map, target_heatmap, reduction='none') # bs, nq, h, w
+ l2_loss = l2_loss * target_weight[:, :, :, None] # bs, nq, h, w
+ l2_loss = l2_loss.flatten(2, 3).sum(-1) / (h * w) # bs, nq
+ l2_loss = l2_loss.sum(-1) / normalizer # bs,
+
+ return l2_loss.mean()
+
+ def get_accuracy(self,
+ output,
+ target,
+ target_weight,
+ target_sizes,
+ height=256):
+ """Calculate accuracy for top-down keypoint loss.
+
+ Args:
+ output (torch.Tensor[NxKx2]): estimated keypoints in ABSOLUTE
+ coordinates.
+ target (torch.Tensor[NxKx2]): gt keypoints in ABSOLUTE coordinates.
+ target_weight (torch.Tensor[NxKx1]): Weights across different
+ joint types.
+ target_sizes (torch.Tensor[Nx2): shapes of the image.
+ """
+ # NOTE: In POMNet, PCK is estimated on 1/8 resolution, which is
+ # slightly different here.
+
+ accuracy = dict()
+ output = output * float(height)
+ output, target, target_weight, target_sizes = (
+ output.detach().cpu().numpy(), target.detach().cpu().numpy(),
+ target_weight.squeeze(-1).long().detach().cpu().numpy(),
+ target_sizes.squeeze(1).detach().cpu().numpy())
+
+ _, avg_acc, _ = keypoint_pck_accuracy(
+ output,
+ target,
+ target_weight.astype(np.bool8),
+ thr=0.2,
+ normalize=target_sizes)
+ accuracy['acc_pose'] = float(avg_acc)
+
+ return accuracy
+
+ def decode(self, img_metas, output, img_size, **kwargs):
+ """Decode the predicted keypoints from prediction.
+
+ Args:
+ img_metas (list(dict)): Information about data augmentation
+ By default this includes:
+ - "image_file: path to the image file
+ - "center": center of the bbox
+ - "scale": scale of the bbox
+ - "rotation": rotation of the bbox
+ - "bbox_score": score of bbox
+ output (np.ndarray[N, K, H, W]): model predicted heatmaps.
+ """
+ batch_size = len(img_metas)
+ W, H = img_size
+ output = output * np.array([
+ W, H
+ ])[None, None, :] # [bs, query, 2], coordinates with recovered shapes.
+
+ if 'bbox_id' or 'query_bbox_id' in img_metas[0]:
+ bbox_ids = []
+ else:
+ bbox_ids = None
+
+ c = np.zeros((batch_size, 2), dtype=np.float32)
+ s = np.zeros((batch_size, 2), dtype=np.float32)
+ image_paths = []
+ score = np.ones(batch_size)
+ for i in range(batch_size):
+ c[i, :] = img_metas[i]['query_center']
+ s[i, :] = img_metas[i]['query_scale']
+ image_paths.append(img_metas[i]['query_image_file'])
+
+ if 'query_bbox_score' in img_metas[i]:
+ score[i] = np.array(
+ img_metas[i]['query_bbox_score']).reshape(-1)
+ if 'bbox_id' in img_metas[i]:
+ bbox_ids.append(img_metas[i]['bbox_id'])
+ elif 'query_bbox_id' in img_metas[i]:
+ bbox_ids.append(img_metas[i]['query_bbox_id'])
+
+ preds = np.zeros(output.shape)
+ for idx in range(output.shape[0]):
+ preds[i] = transform_preds(
+ output[i],
+ c[i],
+ s[i], [W, H],
+ use_udp=self.test_cfg.get('use_udp', False))
+
+ all_preds = np.zeros((batch_size, preds.shape[1], 3), dtype=np.float32)
+ all_boxes = np.zeros((batch_size, 6), dtype=np.float32)
+ all_preds[:, :, 0:2] = preds[:, :, 0:2]
+ all_preds[:, :, 2:3] = 1.0
+ all_boxes[:, 0:2] = c[:, 0:2]
+ all_boxes[:, 2:4] = s[:, 0:2]
+ all_boxes[:, 4] = np.prod(s * 200.0, axis=1)
+ all_boxes[:, 5] = score
+
+ result = {}
+
+ result['preds'] = all_preds
+ result['boxes'] = all_boxes
+ result['image_paths'] = image_paths
+ result['bbox_ids'] = bbox_ids
+
+ return result
diff --git a/projects/pose_anything/models/utils/__init__.py b/projects/pose_anything/models/utils/__init__.py
new file mode 100644
index 0000000000000000000000000000000000000000..fe9927e37f58643ff5b3d377f83a3f463fca6036
--- /dev/null
+++ b/projects/pose_anything/models/utils/__init__.py
@@ -0,0 +1,22 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+from .builder import (build_backbone, build_linear_layer,
+ build_positional_encoding, build_transformer)
+from .encoder_decoder import EncoderDecoder
+from .positional_encoding import (LearnedPositionalEncoding,
+ SinePositionalEncoding)
+from .transformer import (DetrTransformerDecoder, DetrTransformerDecoderLayer,
+ DetrTransformerEncoder, DynamicConv)
+
+__all__ = [
+ 'build_transformer',
+ 'build_backbone',
+ 'build_linear_layer',
+ 'build_positional_encoding',
+ 'DetrTransformerDecoderLayer',
+ 'DetrTransformerDecoder',
+ 'DetrTransformerEncoder',
+ 'LearnedPositionalEncoding',
+ 'SinePositionalEncoding',
+ 'EncoderDecoder',
+ 'DynamicConv',
+]
diff --git a/projects/pose_anything/models/utils/builder.py b/projects/pose_anything/models/utils/builder.py
new file mode 100644
index 0000000000000000000000000000000000000000..a165f98c70b9f764792ea36007eb16e93075ab2b
--- /dev/null
+++ b/projects/pose_anything/models/utils/builder.py
@@ -0,0 +1,61 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import torch.nn as nn
+from mmengine import build_from_cfg
+
+from mmpose.registry import Registry
+
+TRANSFORMER = Registry('Transformer')
+BACKBONES = Registry('BACKBONES')
+POSITIONAL_ENCODING = Registry('position encoding')
+LINEAR_LAYERS = Registry('linear layers')
+
+
+def build_positional_encoding(cfg, default_args=None):
+ """Build backbone."""
+ return build_from_cfg(cfg, POSITIONAL_ENCODING, default_args)
+
+
+def build_backbone(cfg, default_args=None):
+ """Build backbone."""
+ return build_from_cfg(cfg, BACKBONES, default_args)
+
+
+def build_transformer(cfg, default_args=None):
+ """Builder for Transformer."""
+ return build_from_cfg(cfg, TRANSFORMER, default_args)
+
+
+LINEAR_LAYERS.register_module('Linear', module=nn.Linear)
+
+
+def build_linear_layer(cfg, *args, **kwargs):
+ """Build linear layer.
+ Args:
+ cfg (None or dict): The linear layer config, which should contain:
+ - type (str): Layer type.
+ - layer args: Args needed to instantiate an linear layer.
+ args (argument list): Arguments passed to the `__init__`
+ method of the corresponding linear layer.
+ kwargs (keyword arguments): Keyword arguments passed to the `__init__`
+ method of the corresponding linear layer.
+ Returns:
+ nn.Module: Created linear layer.
+ """
+ if cfg is None:
+ cfg_ = dict(type='Linear')
+ else:
+ if not isinstance(cfg, dict):
+ raise TypeError('cfg must be a dict')
+ if 'type' not in cfg:
+ raise KeyError('the cfg dict must contain the key "type"')
+ cfg_ = cfg.copy()
+
+ layer_type = cfg_.pop('type')
+ if layer_type not in LINEAR_LAYERS:
+ raise KeyError(f'Unrecognized linear type {layer_type}')
+ else:
+ linear_layer = LINEAR_LAYERS.get(layer_type)
+
+ layer = linear_layer(*args, **kwargs, **cfg_)
+
+ return layer
diff --git a/projects/pose_anything/models/utils/encoder_decoder.py b/projects/pose_anything/models/utils/encoder_decoder.py
new file mode 100644
index 0000000000000000000000000000000000000000..9e197efb149298eea87415941befd0c04166711b
--- /dev/null
+++ b/projects/pose_anything/models/utils/encoder_decoder.py
@@ -0,0 +1,637 @@
+import copy
+from typing import Optional
+
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+from mmengine.model import xavier_init
+from models.utils.builder import TRANSFORMER
+from torch import Tensor
+
+
+def inverse_sigmoid(x, eps=1e-3):
+ x = x.clamp(min=0, max=1)
+ x1 = x.clamp(min=eps)
+ x2 = (1 - x).clamp(min=eps)
+ return torch.log(x1 / x2)
+
+
+class MLP(nn.Module):
+ """Very simple multi-layer perceptron (also called FFN)"""
+
+ def __init__(self, input_dim, hidden_dim, output_dim, num_layers):
+ super().__init__()
+ self.num_layers = num_layers
+ h = [hidden_dim] * (num_layers - 1)
+ self.layers = nn.ModuleList(
+ nn.Linear(n, k) for n, k in zip([input_dim] + h, h + [output_dim]))
+
+ def forward(self, x):
+ for i, layer in enumerate(self.layers):
+ x = F.gelu(layer(x)) if i < self.num_layers - 1 else layer(x)
+ return x
+
+
+class ProposalGenerator(nn.Module):
+
+ def __init__(self, hidden_dim, proj_dim, dynamic_proj_dim):
+ super().__init__()
+ self.support_proj = nn.Linear(hidden_dim, proj_dim)
+ self.query_proj = nn.Linear(hidden_dim, proj_dim)
+ self.dynamic_proj = nn.Sequential(
+ nn.Linear(hidden_dim, dynamic_proj_dim), nn.ReLU(),
+ nn.Linear(dynamic_proj_dim, hidden_dim))
+ self.dynamic_act = nn.Tanh()
+
+ def forward(self, query_feat, support_feat, spatial_shape):
+ """
+ Args:
+ support_feat: [query, bs, c]
+ query_feat: [hw, bs, c]
+ spatial_shape: h, w
+ """
+ device = query_feat.device
+ _, bs, c = query_feat.shape
+ h, w = spatial_shape
+ side_normalizer = torch.tensor([w, h]).to(query_feat.device)[
+ None, None, :] # [bs, query, 2], Normalize the coord to [0,1]
+
+ query_feat = query_feat.transpose(0, 1)
+ support_feat = support_feat.transpose(0, 1)
+ nq = support_feat.shape[1]
+
+ fs_proj = self.support_proj(support_feat) # [bs, query, c]
+ fq_proj = self.query_proj(query_feat) # [bs, hw, c]
+ pattern_attention = self.dynamic_act(
+ self.dynamic_proj(fs_proj)) # [bs, query, c]
+
+ fs_feat = (pattern_attention + 1) * fs_proj # [bs, query, c]
+ similarity = torch.bmm(fq_proj,
+ fs_feat.transpose(1, 2)) # [bs, hw, query]
+ similarity = similarity.transpose(1, 2).reshape(bs, nq, h, w)
+ grid_y, grid_x = torch.meshgrid(
+ torch.linspace(
+ 0.5, h - 0.5, h, dtype=torch.float32, device=device), # (h, w)
+ torch.linspace(
+ 0.5, w - 0.5, w, dtype=torch.float32, device=device))
+
+ # compute softmax and sum up
+ coord_grid = torch.stack([grid_x, grid_y],
+ dim=0).unsqueeze(0).unsqueeze(0).repeat(
+ bs, nq, 1, 1, 1) # [bs, query, 2, h, w]
+ coord_grid = coord_grid.permute(0, 1, 3, 4, 2) # [bs, query, h, w, 2]
+ similarity_softmax = similarity.flatten(2, 3).softmax(
+ dim=-1) # [bs, query, hw]
+ similarity_coord_grid = similarity_softmax[:, :, :,
+ None] * coord_grid.flatten(
+ 2, 3)
+ proposal_for_loss = similarity_coord_grid.sum(
+ dim=2, keepdim=False) # [bs, query, 2]
+ proposal_for_loss = proposal_for_loss / side_normalizer
+
+ max_pos = torch.argmax(
+ similarity.reshape(bs, nq, -1), dim=-1,
+ keepdim=True) # (bs, nq, 1)
+ max_mask = F.one_hot(max_pos, num_classes=w * h) # (bs, nq, 1, w*h)
+ max_mask = max_mask.reshape(bs, nq, w,
+ h).type(torch.float) # (bs, nq, w, h)
+ local_max_mask = F.max_pool2d(
+ input=max_mask, kernel_size=3, stride=1,
+ padding=1).reshape(bs, nq, w * h, 1) # (bs, nq, w*h, 1)
+ '''
+ proposal = (similarity_coord_grid * local_max_mask).sum(
+ dim=2, keepdim=False) / torch.count_nonzero(
+ local_max_mask, dim=2)
+ '''
+ # first, extract the local probability map with the mask
+ local_similarity_softmax = similarity_softmax[:, :, :,
+ None] * local_max_mask
+
+ # then, re-normalize the local probability map
+ local_similarity_softmax = local_similarity_softmax / (
+ local_similarity_softmax.sum(dim=-2, keepdim=True) + 1e-10
+ ) # [bs, nq, w*h, 1]
+
+ # point-wise mulplication of local probability map and coord grid
+ proposals = local_similarity_softmax * coord_grid.flatten(
+ 2, 3) # [bs, nq, w*h, 2]
+
+ # sum the mulplication to obtain the final coord proposals
+ proposals = proposals.sum(dim=2) / side_normalizer # [bs, nq, 2]
+
+ return proposal_for_loss, similarity, proposals
+
+
+@TRANSFORMER.register_module()
+class EncoderDecoder(nn.Module):
+
+ def __init__(self,
+ d_model=256,
+ nhead=8,
+ num_encoder_layers=3,
+ num_decoder_layers=3,
+ graph_decoder=None,
+ dim_feedforward=2048,
+ dropout=0.1,
+ activation='relu',
+ normalize_before=False,
+ similarity_proj_dim=256,
+ dynamic_proj_dim=128,
+ return_intermediate_dec=True,
+ look_twice=False,
+ detach_support_feat=False):
+ super().__init__()
+
+ self.d_model = d_model
+ self.nhead = nhead
+
+ encoder_layer = TransformerEncoderLayer(d_model, nhead,
+ dim_feedforward, dropout,
+ activation, normalize_before)
+ encoder_norm = nn.LayerNorm(d_model) if normalize_before else None
+ self.encoder = TransformerEncoder(encoder_layer, num_encoder_layers,
+ encoder_norm)
+
+ decoder_layer = GraphTransformerDecoderLayer(d_model, nhead,
+ dim_feedforward, dropout,
+ activation,
+ normalize_before,
+ graph_decoder)
+ decoder_norm = nn.LayerNorm(d_model)
+ self.decoder = GraphTransformerDecoder(
+ d_model,
+ decoder_layer,
+ num_decoder_layers,
+ decoder_norm,
+ return_intermediate=return_intermediate_dec,
+ look_twice=look_twice,
+ detach_support_feat=detach_support_feat)
+
+ self.proposal_generator = ProposalGenerator(
+ hidden_dim=d_model,
+ proj_dim=similarity_proj_dim,
+ dynamic_proj_dim=dynamic_proj_dim)
+
+ def init_weights(self):
+ # follow the official DETR to init parameters
+ for m in self.modules():
+ if hasattr(m, 'weight') and m.weight.dim() > 1:
+ xavier_init(m, distribution='uniform')
+
+ def forward(self,
+ src,
+ mask,
+ support_embed,
+ pos_embed,
+ support_order_embed,
+ query_padding_mask,
+ position_embedding,
+ kpt_branch,
+ skeleton,
+ return_attn_map=False):
+
+ bs, c, h, w = src.shape
+
+ src = src.flatten(2).permute(2, 0, 1)
+ pos_embed = pos_embed.flatten(2).permute(2, 0, 1)
+ support_order_embed = support_order_embed.flatten(2).permute(2, 0, 1)
+ pos_embed = torch.cat((pos_embed, support_order_embed))
+ query_embed = support_embed.transpose(0, 1)
+ mask = mask.flatten(1)
+
+ query_embed, refined_support_embed = self.encoder(
+ src,
+ query_embed,
+ src_key_padding_mask=mask,
+ query_key_padding_mask=query_padding_mask,
+ pos=pos_embed)
+
+ # Generate initial proposals and corresponding positional embedding.
+ initial_proposals_for_loss, similarity_map, initial_proposals = (
+ self.proposal_generator(
+ query_embed, refined_support_embed, spatial_shape=[h, w]))
+ initial_position_embedding = position_embedding.forward_coordinates(
+ initial_proposals)
+
+ outs_dec, out_points, attn_maps = self.decoder(
+ refined_support_embed,
+ query_embed,
+ memory_key_padding_mask=mask,
+ pos=pos_embed,
+ query_pos=initial_position_embedding,
+ tgt_key_padding_mask=query_padding_mask,
+ position_embedding=position_embedding,
+ initial_proposals=initial_proposals,
+ kpt_branch=kpt_branch,
+ skeleton=skeleton,
+ return_attn_map=return_attn_map)
+
+ return outs_dec.transpose(
+ 1, 2), initial_proposals_for_loss, out_points, similarity_map
+
+
+class GraphTransformerDecoder(nn.Module):
+
+ def __init__(self,
+ d_model,
+ decoder_layer,
+ num_layers,
+ norm=None,
+ return_intermediate=False,
+ look_twice=False,
+ detach_support_feat=False):
+ super().__init__()
+ self.layers = _get_clones(decoder_layer, num_layers)
+ self.num_layers = num_layers
+ self.norm = norm
+ self.return_intermediate = return_intermediate
+ self.ref_point_head = MLP(d_model, d_model, d_model, num_layers=2)
+ self.look_twice = look_twice
+ self.detach_support_feat = detach_support_feat
+
+ def forward(self,
+ support_feat,
+ query_feat,
+ tgt_mask=None,
+ memory_mask=None,
+ tgt_key_padding_mask=None,
+ memory_key_padding_mask=None,
+ pos=None,
+ query_pos=None,
+ position_embedding=None,
+ initial_proposals=None,
+ kpt_branch=None,
+ skeleton=None,
+ return_attn_map=False):
+ """
+ position_embedding: Class used to compute positional embedding
+ initial_proposals: [bs, nq, 2], normalized coordinates of initial
+ proposals kpt_branch: MLP used to predict the offsets for each query.
+ """
+
+ refined_support_feat = support_feat
+ intermediate = []
+ attn_maps = []
+ bi = initial_proposals.detach()
+ bi_tag = initial_proposals.detach()
+ query_points = [initial_proposals.detach()]
+
+ tgt_key_padding_mask_remove_all_true = tgt_key_padding_mask.clone().to(
+ tgt_key_padding_mask.device)
+ tgt_key_padding_mask_remove_all_true[
+ tgt_key_padding_mask.logical_not().sum(dim=-1) == 0, 0] = False
+
+ for layer_idx, layer in enumerate(self.layers):
+ if layer_idx == 0: # use positional embedding form initial
+ # proposals
+ query_pos_embed = query_pos.transpose(0, 1)
+ else:
+ # recalculate the positional embedding
+ query_pos_embed = position_embedding.forward_coordinates(bi)
+ query_pos_embed = query_pos_embed.transpose(0, 1)
+ query_pos_embed = self.ref_point_head(query_pos_embed)
+
+ if self.detach_support_feat:
+ refined_support_feat = refined_support_feat.detach()
+
+ refined_support_feat, attn_map = layer(
+ refined_support_feat,
+ query_feat,
+ tgt_mask=tgt_mask,
+ memory_mask=memory_mask,
+ tgt_key_padding_mask=tgt_key_padding_mask_remove_all_true,
+ memory_key_padding_mask=memory_key_padding_mask,
+ pos=pos,
+ query_pos=query_pos_embed,
+ skeleton=skeleton)
+
+ if self.return_intermediate:
+ intermediate.append(self.norm(refined_support_feat))
+
+ if return_attn_map:
+ attn_maps.append(attn_map)
+
+ # update the query coordinates
+ delta_bi = kpt_branch[layer_idx](
+ refined_support_feat.transpose(0, 1))
+
+ # Prediction loss
+ if self.look_twice:
+ bi_pred = self.update(bi_tag, delta_bi)
+ bi_tag = self.update(bi, delta_bi)
+ else:
+ bi_tag = self.update(bi, delta_bi)
+ bi_pred = bi_tag
+
+ bi = bi_tag.detach()
+ query_points.append(bi_pred)
+
+ if self.norm is not None:
+ refined_support_feat = self.norm(refined_support_feat)
+ if self.return_intermediate:
+ intermediate.pop()
+ intermediate.append(refined_support_feat)
+
+ if self.return_intermediate:
+ return torch.stack(intermediate), query_points, attn_maps
+
+ return refined_support_feat.unsqueeze(0), query_points, attn_maps
+
+ def update(self, query_coordinates, delta_unsig):
+ query_coordinates_unsigmoid = inverse_sigmoid(query_coordinates)
+ new_query_coordinates = query_coordinates_unsigmoid + delta_unsig
+ new_query_coordinates = new_query_coordinates.sigmoid()
+ return new_query_coordinates
+
+
+class GraphTransformerDecoderLayer(nn.Module):
+
+ def __init__(self,
+ d_model,
+ nhead,
+ dim_feedforward=2048,
+ dropout=0.1,
+ activation='relu',
+ normalize_before=False,
+ graph_decoder=None):
+
+ super().__init__()
+ self.graph_decoder = graph_decoder
+ self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)
+ self.multihead_attn = nn.MultiheadAttention(
+ d_model * 2, nhead, dropout=dropout, vdim=d_model)
+ self.choker = nn.Linear(in_features=2 * d_model, out_features=d_model)
+ # Implementation of Feedforward model
+ if self.graph_decoder is None:
+ self.ffn1 = nn.Linear(d_model, dim_feedforward)
+ self.ffn2 = nn.Linear(dim_feedforward, d_model)
+ elif self.graph_decoder == 'pre':
+ self.ffn1 = GCNLayer(d_model, dim_feedforward, batch_first=False)
+ self.ffn2 = nn.Linear(dim_feedforward, d_model)
+ elif self.graph_decoder == 'post':
+ self.ffn1 = nn.Linear(d_model, dim_feedforward)
+ self.ffn2 = GCNLayer(dim_feedforward, d_model, batch_first=False)
+ else:
+ self.ffn1 = GCNLayer(d_model, dim_feedforward, batch_first=False)
+ self.ffn2 = GCNLayer(dim_feedforward, d_model, batch_first=False)
+
+ self.dropout = nn.Dropout(dropout)
+ self.norm1 = nn.LayerNorm(d_model)
+ self.norm2 = nn.LayerNorm(d_model)
+ self.norm3 = nn.LayerNorm(d_model)
+ self.dropout1 = nn.Dropout(dropout)
+ self.dropout2 = nn.Dropout(dropout)
+ self.dropout3 = nn.Dropout(dropout)
+
+ self.activation = _get_activation_fn(activation)
+ self.normalize_before = normalize_before
+
+ def with_pos_embed(self, tensor, pos: Optional[Tensor]):
+ return tensor if pos is None else tensor + pos
+
+ def forward(self,
+ refined_support_feat,
+ refined_query_feat,
+ tgt_mask: Optional[Tensor] = None,
+ memory_mask: Optional[Tensor] = None,
+ tgt_key_padding_mask: Optional[Tensor] = None,
+ memory_key_padding_mask: Optional[Tensor] = None,
+ pos: Optional[Tensor] = None,
+ query_pos: Optional[Tensor] = None,
+ skeleton: Optional[list] = None):
+
+ q = k = self.with_pos_embed(
+ refined_support_feat,
+ query_pos + pos[refined_query_feat.shape[0]:])
+ tgt2 = self.self_attn(
+ q,
+ k,
+ value=refined_support_feat,
+ attn_mask=tgt_mask,
+ key_padding_mask=tgt_key_padding_mask)[0]
+
+ refined_support_feat = refined_support_feat + self.dropout1(tgt2)
+ refined_support_feat = self.norm1(refined_support_feat)
+
+ # concatenate the positional embedding with the content feature,
+ # instead of direct addition
+ cross_attn_q = torch.cat(
+ (refined_support_feat,
+ query_pos + pos[refined_query_feat.shape[0]:]),
+ dim=-1)
+ cross_attn_k = torch.cat(
+ (refined_query_feat, pos[:refined_query_feat.shape[0]]), dim=-1)
+
+ tgt2, attn_map = self.multihead_attn(
+ query=cross_attn_q,
+ key=cross_attn_k,
+ value=refined_query_feat,
+ attn_mask=memory_mask,
+ key_padding_mask=memory_key_padding_mask)
+
+ refined_support_feat = refined_support_feat + self.dropout2(
+ self.choker(tgt2))
+ refined_support_feat = self.norm2(refined_support_feat)
+ if self.graph_decoder is not None:
+ num_pts, b, c = refined_support_feat.shape
+ adj = adj_from_skeleton(
+ num_pts=num_pts,
+ skeleton=skeleton,
+ mask=tgt_key_padding_mask,
+ device=refined_support_feat.device)
+ if self.graph_decoder == 'pre':
+ tgt2 = self.ffn2(
+ self.dropout(
+ self.activation(self.ffn1(refined_support_feat, adj))))
+ elif self.graph_decoder == 'post':
+ tgt2 = self.ffn2(
+ self.dropout(
+ self.activation(self.ffn1(refined_support_feat))), adj)
+ else:
+ tgt2 = self.ffn2(
+ self.dropout(
+ self.activation(self.ffn1(refined_support_feat, adj))),
+ adj)
+ else:
+ tgt2 = self.ffn2(
+ self.dropout(self.activation(self.ffn1(refined_support_feat))))
+ refined_support_feat = refined_support_feat + self.dropout3(tgt2)
+ refined_support_feat = self.norm3(refined_support_feat)
+
+ return refined_support_feat, attn_map
+
+
+class TransformerEncoder(nn.Module):
+
+ def __init__(self, encoder_layer, num_layers, norm=None):
+ super().__init__()
+ self.layers = _get_clones(encoder_layer, num_layers)
+ self.num_layers = num_layers
+ self.norm = norm
+
+ def forward(self,
+ src,
+ query,
+ mask: Optional[Tensor] = None,
+ src_key_padding_mask: Optional[Tensor] = None,
+ query_key_padding_mask: Optional[Tensor] = None,
+ pos: Optional[Tensor] = None):
+ # src: [hw, bs, c]
+ # query: [num_query, bs, c]
+ # mask: None by default
+ # src_key_padding_mask: [bs, hw]
+ # query_key_padding_mask: [bs, nq]
+ # pos: [hw, bs, c]
+
+ # organize the input
+ # implement the attention mask to mask out the useless points
+ n, bs, c = src.shape
+ src_cat = torch.cat((src, query), dim=0) # [hw + nq, bs, c]
+ mask_cat = torch.cat((src_key_padding_mask, query_key_padding_mask),
+ dim=1) # [bs, hw+nq]
+ output = src_cat
+
+ for layer in self.layers:
+ output = layer(
+ output,
+ query_length=n,
+ src_mask=mask,
+ src_key_padding_mask=mask_cat,
+ pos=pos)
+
+ if self.norm is not None:
+ output = self.norm(output)
+
+ # resplit the output into src and query
+ refined_query = output[n:, :, :] # [nq, bs, c]
+ output = output[:n, :, :] # [n, bs, c]
+
+ return output, refined_query
+
+
+class TransformerEncoderLayer(nn.Module):
+
+ def __init__(self,
+ d_model,
+ nhead,
+ dim_feedforward=2048,
+ dropout=0.1,
+ activation='relu',
+ normalize_before=False):
+ super().__init__()
+ self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)
+ # Implementation of Feedforward model
+ self.linear1 = nn.Linear(d_model, dim_feedforward)
+ self.dropout = nn.Dropout(dropout)
+ self.linear2 = nn.Linear(dim_feedforward, d_model)
+
+ self.norm1 = nn.LayerNorm(d_model)
+ self.norm2 = nn.LayerNorm(d_model)
+ self.dropout1 = nn.Dropout(dropout)
+ self.dropout2 = nn.Dropout(dropout)
+
+ self.activation = _get_activation_fn(activation)
+ self.normalize_before = normalize_before
+
+ def with_pos_embed(self, tensor, pos: Optional[Tensor]):
+ return tensor if pos is None else tensor + pos
+
+ def forward(self,
+ src,
+ query_length,
+ src_mask: Optional[Tensor] = None,
+ src_key_padding_mask: Optional[Tensor] = None,
+ pos: Optional[Tensor] = None):
+ src = self.with_pos_embed(src, pos)
+ q = k = src
+ # NOTE: compared with original implementation, we add positional
+ # embedding into the VALUE.
+ src2 = self.self_attn(
+ q,
+ k,
+ value=src,
+ attn_mask=src_mask,
+ key_padding_mask=src_key_padding_mask)[0]
+ src = src + self.dropout1(src2)
+ src = self.norm1(src)
+ src2 = self.linear2(self.dropout(self.activation(self.linear1(src))))
+ src = src + self.dropout2(src2)
+ src = self.norm2(src)
+ return src
+
+
+def adj_from_skeleton(num_pts, skeleton, mask, device='cuda'):
+ adj_mx = torch.empty(0, device=device)
+ batch_size = len(skeleton)
+ for b in range(batch_size):
+ edges = torch.tensor(skeleton[b])
+ adj = torch.zeros(num_pts, num_pts, device=device)
+ adj[edges[:, 0], edges[:, 1]] = 1
+ adj_mx = torch.cat((adj_mx, adj.unsqueeze(0)), dim=0)
+ trans_adj_mx = torch.transpose(adj_mx, 1, 2)
+ cond = (trans_adj_mx > adj_mx).float()
+ adj = adj_mx + trans_adj_mx * cond - adj_mx * cond
+ adj = adj * ~mask[..., None] * ~mask[:, None]
+ adj = torch.nan_to_num(adj / adj.sum(dim=-1, keepdim=True))
+ adj = torch.stack((torch.diag_embed(~mask), adj), dim=1)
+ return adj
+
+
+class GCNLayer(nn.Module):
+
+ def __init__(self,
+ in_features,
+ out_features,
+ kernel_size=2,
+ use_bias=True,
+ activation=nn.ReLU(inplace=True),
+ batch_first=True):
+ super(GCNLayer, self).__init__()
+ self.conv = nn.Conv1d(
+ in_features,
+ out_features * kernel_size,
+ kernel_size=1,
+ padding=0,
+ stride=1,
+ dilation=1,
+ bias=use_bias)
+ self.kernel_size = kernel_size
+ self.activation = activation
+ self.batch_first = batch_first
+
+ def forward(self, x, adj):
+ assert adj.size(1) == self.kernel_size
+ if not self.batch_first:
+ x = x.permute(1, 2, 0)
+ else:
+ x = x.transpose(1, 2)
+ x = self.conv(x)
+ b, kc, v = x.size()
+ x = x.view(b, self.kernel_size, kc // self.kernel_size, v)
+ x = torch.einsum('bkcv,bkvw->bcw', (x, adj))
+ if self.activation is not None:
+ x = self.activation(x)
+ if not self.batch_first:
+ x = x.permute(2, 0, 1)
+ else:
+ x = x.transpose(1, 2)
+ return x
+
+
+def _get_clones(module, N):
+ return nn.ModuleList([copy.deepcopy(module) for i in range(N)])
+
+
+def _get_activation_fn(activation):
+ """Return an activation function given a string."""
+ if activation == 'relu':
+ return F.relu
+ if activation == 'gelu':
+ return F.gelu
+ if activation == 'glu':
+ return F.glu
+ raise RuntimeError(F'activation should be relu/gelu, not {activation}.')
+
+
+def clones(module, N):
+ return nn.ModuleList([copy.deepcopy(module) for _ in range(N)])
diff --git a/projects/pose_anything/models/utils/positional_encoding.py b/projects/pose_anything/models/utils/positional_encoding.py
new file mode 100644
index 0000000000000000000000000000000000000000..2fe441a51c628efcbfc27146552ae71fe080508f
--- /dev/null
+++ b/projects/pose_anything/models/utils/positional_encoding.py
@@ -0,0 +1,195 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import math
+
+import torch
+import torch.nn as nn
+from mmengine.model import BaseModule
+from models.utils.builder import POSITIONAL_ENCODING
+
+
+# TODO: add an SinePositionalEncoding for coordinates input
+@POSITIONAL_ENCODING.register_module()
+class SinePositionalEncoding(BaseModule):
+ """Position encoding with sine and cosine functions.
+
+ See `End-to-End Object Detection with Transformers
+
++ +Refer to [our paper](https://arxiv.org/abs/2312.07526) for more details. + +## 🎉 News + +- **`2023/12/13`**: The RTMO paper and models are released! + +## 🗂️ Model Zoo + +### Results on COCO val2017 dataset + +| Model | Train Set | Latency (ms) | AP | AP50 | AP75 | AR | AR50 | Download | +| :----------------------------------------------------------- | :-------: | :----------: | :---: | :-------------: | :-------------: | :---: | :-------------: | :--------------------------------------------------------------: | +| [RTMO-s](/configs/body_2d_keypoint/rtmo/coco/rtmo-s_8xb32-600e_coco-640x640.py) | COCO | 8.9 | 0.677 | 0.878 | 0.737 | 0.715 | 0.908 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_coco-640x640-8db55a59_20231211.pth) | +| [RTMO-m](/configs/body_2d_keypoint/rtmo/coco/rtmo-m_16xb16-600e_coco-640x640.py) | COCO | 12.4 | 0.709 | 0.890 | 0.778 | 0.747 | 0.920 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_coco-640x640-6f4e0306_20231211.pth) | +| [RTMO-l](/configs/body_2d_keypoint/rtmo/coco/rtmo-l_16xb16-600e_coco-640x640.py) | COCO | 19.1 | 0.724 | 0.899 | 0.788 | 0.762 | 0.927 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_coco-640x640-516a421f_20231211.pth) | +| [RTMO-t](/configs/body_2d_keypoint/rtmo/body7/rtmo-t_8xb32-600e_body7-416x416.py) | body7 | - | 0.574 | 0.803 | 0.613 | 0.611 | 0.836 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-t_8xb32-600e_body7-416x416-f48f75cb_20231219.pth) \| [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-t_8xb32-600e_body7-416x416-f48f75cb_20231219.zip) | +| [RTMO-s](/configs/body_2d_keypoint/rtmo/body7/rtmo-s_8xb32-600e_body7-640x640.py) | body7 | 8.9 | 0.686 | 0.879 | 0.744 | 0.723 | 0.908 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-600e_body7-640x640-dac2bf74_20231211.pth) \| [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-s_8xb32-600e_body7-640x640-dac2bf74_20231211.zip) | +| [RTMO-m](/configs/body_2d_keypoint/rtmo/body7/rtmo-m_16xb16-600e_body7-640x640.py) | body7 | 12.4 | 0.726 | 0.899 | 0.790 | 0.763 | 0.926 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-m_16xb16-600e_body7-640x640-39e78cc4_20231211.pth) \| [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-m_16xb16-600e_body7-640x640-39e78cc4_20231211.zip) | +| [RTMO-l](/configs/body_2d_keypoint/rtmo/body7/rtmo-l_16xb16-600e_body7-640x640.py) | body7 | 19.1 | 0.748 | 0.911 | 0.813 | 0.786 | 0.939 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-600e_body7-640x640-b37118ce_20231211.pth) \| [onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmo/onnx_sdk/rtmo-l_16xb16-600e_body7-640x640-b37118ce_20231211.zip) | + +- The latency is evaluated on a single V100 GPU with ONNXRuntime backend. +- "body7" refers to a combined dataset composed of [AI Challenger](https://github.com/AIChallenger/AI_Challenger_2017), [COCO](http://cocodataset.org/), [CrowdPose](https://github.com/Jeff-sjtu/CrowdPose), [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/), [MPII](http://human-pose.mpi-inf.mpg.de/), [PoseTrack18](https://posetrack.net/users/download.php) and [sub-JHMDB](http://jhmdb.is.tue.mpg.de/dataset). + +### Results on CrowdPose test dataset + +| Model | Train Set | AP | AP50 | AP75 | AP (E) | AP (M) | AP (H) | Download | +| :------------------------------------------------------------------ | :-------: | :---: | :-------------: | :-------------: | :----: | :----: | :----: | :---------------------------------------------------------------------: | +| [RTMO-s](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-s_8xb32-700e_crowdpose-640x640.py) | CrowdPose | 0.673 | 0.882 | 0.729 | 0.737 | 0.682 | 0.591 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-s_8xb32-700e_crowdpose-640x640-79f81c0d_20231211.pth) | +| [RTMO-m](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-m_16xb16-700e_crowdpose-640x640.py) | CrowdPose | 0.711 | 0.897 | 0.771 | 0.774 | 0.719 | 0.634 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rrtmo-m_16xb16-700e_crowdpose-640x640-0eaf670d_20231211.pth) | +| [RTMO-l](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_crowdpose-640x640.py) | CrowdPose | 0.732 | 0.907 | 0.793 | 0.792 | 0.741 | 0.653 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_crowdpose-640x640-1008211f_20231211.pth) | +| [RTMO-l](/configs/body_2d_keypoint/rtmo/crowdpose/rtmo-l_16xb16-700e_body7-crowdpose-640x640.py) | body7 | 0.838 | 0.947 | 0.893 | 0.888 | 0.847 | 0.772 | [ckpt](https://download.openmmlab.com/mmpose/v1/projects/rtmo/rtmo-l_16xb16-700e_body7-crowdpose-640x640-5bafdc11_20231219.pth) | + +## 🖥️ Train and Evaluation + +### Dataset Preparation + +Please follow [this instruction](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html) to prepare the training and testing datasets. + +### Train + +Under the root directory of mmpose, run the following command to train models: + +```sh +sh tools/dist_train.sh $CONFIG $NUM_GPUS --work-dir $WORK_DIR --amp +``` + +- Automatic Mixed Precision (AMP) technique is used to reduce GPU memory consumption during training. + +### Evaluation + +Under the root directory of mmpose, run the following command to evaluate models: + +```sh +sh tools/dist_test.sh $CONFIG $PATH_TO_CHECKPOINT $NUM_GPUS +``` + +See [here](https://mmpose.readthedocs.io/en/latest/user_guides/train_and_test.html) for more training and evaluation details. + +## 🛞 Deployment + +[MMDeploy](https://github.com/open-mmlab/mmdeploy) provides tools for easy deployment of RTMO models. [\[Install Now\]](https://mmdeploy.readthedocs.io/en/latest/get_started.html#installation) + +**⭕ Notice**: + +- PyTorch **1.12+** is required to export the ONNX model of RTMO! + +- MMDeploy v1.3.1+ is required to deploy RTMO. + +### ONNX Model Export + +Under mmdeploy root, run: + +```sh +python tools/deploy.py \ + configs/mmpose/pose-detection_rtmo_onnxruntime_dynamic-640x640.py \ + $RTMO_CONFIG $RTMO_CHECKPOINT \ + $MMPOSE_ROOT/tests/data/coco/000000197388.jpg \ + --work-dir $WORK_DIR --dump-info \ + [--show] [--device $DEVICE] +``` + +### TensorRT Model Export + +[Install TensorRT](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/tensorrt.html#install-tensorrt) and [build custom ops](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/tensorrt.html#build-custom-ops) first. + +Then under mmdeploy root, run: + +```sh +python tools/deploy.py \ + configs/mmpose/pose-detection_rtmo_tensorrt-fp16_dynamic-640x640.py \ + $RTMO_CONFIG $RTMO_CHECKPOINT \ + $MMPOSE_ROOT/tests/data/coco/000000197388.jpg \ + --work-dir $WORK_DIR --dump-info \ + --device cuda:0 [--show] +``` + +This conversion takes several minutes. GPU is required for TensorRT model exportation. + +## ⭐ Citation + +If this project benefits your work, please kindly consider citing the original paper and MMPose: + +```bibtex +@misc{lu2023rtmo, + title={{RTMO}: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation}, + author={Peng Lu and Tao Jiang and Yining Li and Xiangtai Li and Kai Chen and Wenming Yang}, + year={2023}, + eprint={2312.07526}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} + +@misc{mmpose2020, + title={OpenMMLab Pose Estimation Toolbox and Benchmark}, + author={MMPose Contributors}, + howpublished = {\url{https://github.com/open-mmlab/mmpose}}, + year={2020} +} +``` diff --git a/projects/rtmpose/README.md b/projects/rtmpose/README.md new file mode 100644 index 0000000000000000000000000000000000000000..94bbc2ca2d7a22eb05fe51c7dd02a801e32c5c48 --- /dev/null +++ b/projects/rtmpose/README.md @@ -0,0 +1,1269 @@ +
+
+
+
+# RTMPose: Real-Time Multi-Person Pose Estimation toolkit based on MMPose
+
+> [RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose](https://arxiv.org/abs/2303.07399)
+
+
+
+English | [简体中文](README_CN.md)
+
+
+
+______________________________________________________________________
+
+## Abstract
+
+Recent studies on 2D pose estimation have achieved excellent performance on public benchmarks, yet its application in the industrial community still suffers from heavy model parameters and high latency.
+In order to bridge this gap, we empirically study five aspects that affect the performance of multi-person pose estimation algorithms: paradigm, backbone network, localization algorithm, training strategy, and deployment inference, and present a high-performance real-time multi-person pose estimation framework, **RTMPose**, based on MMPose.
+Our RTMPose-m achieves **75.8% AP** on COCO with **90+ FPS** on an Intel i7-11700 CPU and **430+ FPS** on an NVIDIA GTX 1660 Ti GPU.
+To further evaluate RTMPose's capability in critical real-time applications, we also report the performance after deploying on the mobile device. Our RTMPose-s achieves **72.2% AP** on COCO with **70+ FPS** on a Snapdragon 865 chip, outperforming existing open-source libraries.
+With the help of MMDeploy, our project supports various platforms like CPU, GPU, NVIDIA Jetson, and mobile devices and multiple inference backends such as ONNXRuntime, TensorRT, ncnn, etc.
+
+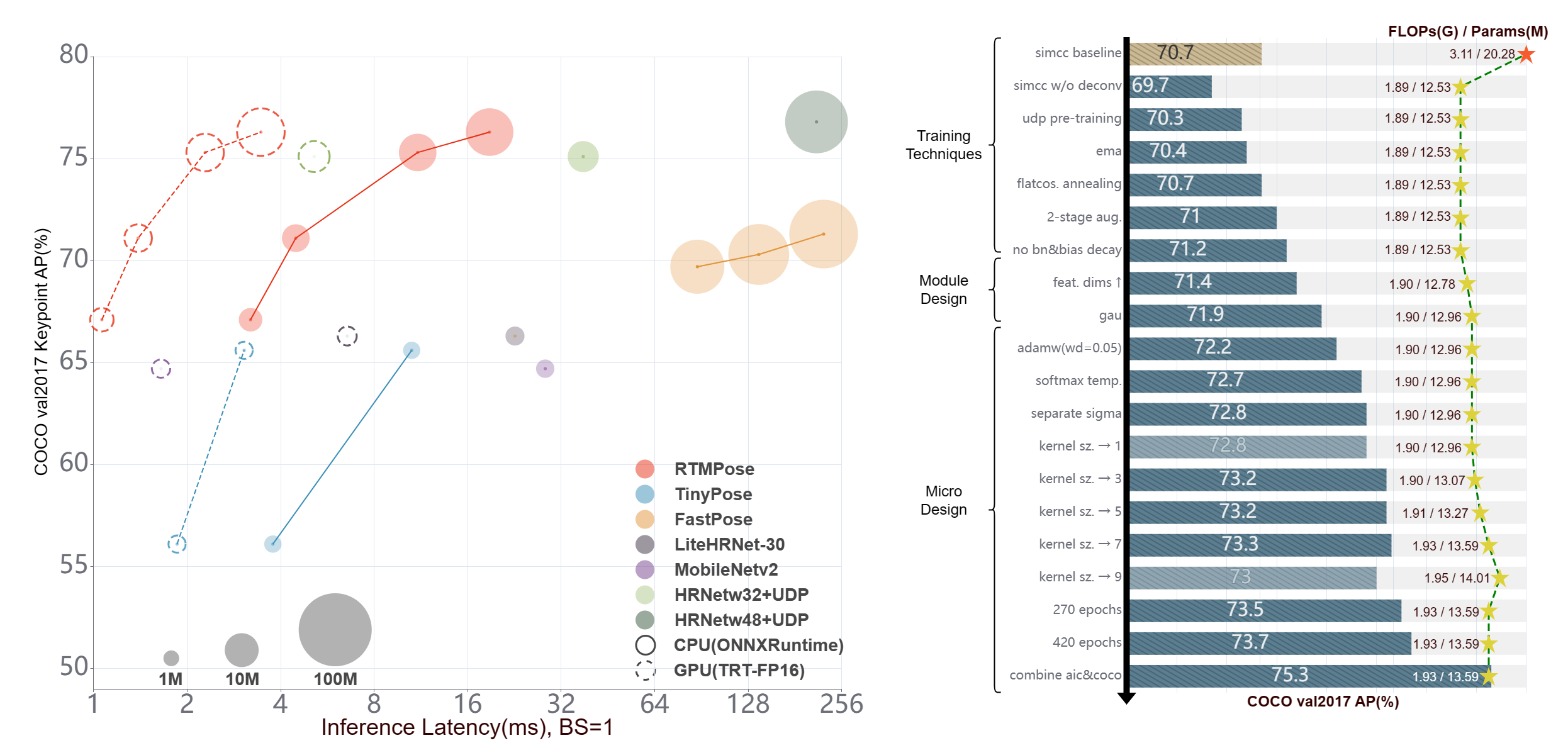
+
+______________________________________________________________________
+
+## 📄 Table of Contents
+
+- [🥳 🚀 What's New](#--whats-new-)
+- [📖 Introduction](#-introduction-)
+- [🙌 Community](#-community-)
+- [⚡ Pipeline Performance](#-pipeline-performance-)
+- [📊 Model Zoo](#-model-zoo-)
+- [👀 Visualization](#-visualization-)
+- [😎 Get Started](#-get-started-)
+- [👨🏫 How to Train](#-how-to-train-)
+- [🏗️ How to Deploy](#️-how-to-deploy-)
+- [📚 Common Usage](#️-common-usage-)
+ - [🚀 Inference Speed Test](#-inference-speed-test-)
+ - [📊 Model Test](#-model-test-)
+- [📜 Citation](#-citation-)
+
+## 🥳 🚀 What's New [🔝](#-table-of-contents)
+
+- Dec. 2023:
+ - Update RTMW models. The RTMW-l model achieves 70.1 mAP on COCO-Wholebody val set.
+- Sep. 2023:
+ - Add RTMW models trained on combined datasets. The alpha version of RTMW-x model achieves 70.2 mAP on COCO-Wholebody val set. You can try it [Here](https://openxlab.org.cn/apps/detail/mmpose/RTMPose). The technical report will be released soon.
+ - Add YOLOX and RTMDet models trained on HumanArt dataset.
+- Aug. 2023:
+ - Support distilled 133-keypoint WholeBody models powered by [DWPose](https://github.com/IDEA-Research/DWPose/tree/main).
+ - You can try DWPose/RTMPose with [sd-webui-controlnet](https://github.com/Mikubill/sd-webui-controlnet) now! Just update your sd-webui-controlnet >= v1.1237, then choose `dw_openpose_full` as preprocessor.
+ - You can try our DWPose with this [Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose) by choosing `wholebody`!
+- Jul. 2023:
+ - Add [Online RTMPose Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose).
+ - Support 17-keypoint Body models trained on Human-Art.
+- Jun. 2023:
+ - Release 26-keypoint Body models trained on combined datasets.
+- May. 2023:
+ - Exported SDK models (ONNX, TRT, ncnn, etc.) can be downloaded from [OpenMMLab Deploee](https://platform.openmmlab.com/deploee).
+ - [Online Conversion](https://platform.openmmlab.com/deploee/task-convert-list) of `.pth` models into SDK models (ONNX, TensorRT, ncnn, etc.).
+ - Add [code examples](./examples/) of RTMPose, such as:
+ - Pure Python inference without MMDeploy, MMCV etc.
+ - C++ examples with ONNXRuntime and TensorRT backends.
+ - Android examples with ncnn backend.
+ - Release Hand, Face, Body models trained on combined datasets.
+- Mar. 2023: RTMPose is released. RTMPose-m runs at 430+ FPS and achieves 75.8 mAP on COCO val set.
+
+## 📖 Introduction [🔝](#-table-of-contents)
+
+
+
 +
+
+
+
+
+
 +
+
+
+
+
 +
+
+
+### ✨ Major Features
+
+- 🚀 **High efficiency and high accuracy**
+
+ | Model | AP(COCO) | CPU-FPS | GPU-FPS |
+ | :---: | :------: | :-----: | :-----: |
+ | t | 68.5 | 300+ | 940+ |
+ | s | 72.2 | 200+ | 710+ |
+ | m | 75.8 | 90+ | 430+ |
+ | l | 76.5 | 50+ | 280+ |
+
+- 🛠️ **Easy to deploy**
+
+ - Step-by-step deployment tutorials.
+ - Support various backends including
+ - ONNX
+ - TensorRT
+ - ncnn
+ - OpenVINO
+ - etc.
+ - Support various platforms including
+ - Linux
+ - Windows
+ - NVIDIA Jetson
+ - ARM
+ - etc.
+
+- 🏗️ **Design for practical applications**
+
+ - Pipeline inference API and SDK for
+ - Python
+ - C++
+ - C#
+ - JAVA
+ - etc.
+
+## 🙌 Community [🔝](#-table-of-contents)
+
+RTMPose is a long-term project dedicated to the training, optimization and deployment of high-performance real-time pose estimation algorithms in practical scenarios, so we are looking forward to the power from the community. Welcome to share the training configurations and tricks based on RTMPose in different business applications to help more community users!
+
+✨ ✨ ✨
+
+- **If you are a new user of RTMPose, we eagerly hope you can fill out this [Google Questionnaire](https://docs.google.com/forms/d/e/1FAIpQLSfzwWr3eNlDzhU98qzk2Eph44Zio6hi5r0iSwfO9wSARkHdWg/viewform?usp=sf_link)/[Chinese version](https://uua478.fanqier.cn/f/xxmynrki), it's very important for our work!**
+
+✨ ✨ ✨
+
+Feel free to join our community group for more help:
+
+- WeChat Group:
+
+
+
+ +
+
+
+- Discord Group:
+ - 🙌 https://discord.gg/raweFPmdzG 🙌
+
+## ⚡ Pipeline Performance [🔝](#-table-of-contents)
+
+**Notes**
+
+- Pipeline latency is tested under skip-frame settings, the detection interval is 5 frames by defaults.
+- Flip test is NOT used.
+- Env Setup:
+ - torch >= 1.7.1
+ - onnxruntime 1.12.1
+ - TensorRT 8.4.3.1
+ - ncnn 20221128
+ - cuDNN 8.3.2
+ - CUDA 11.3
+- **Updates**: We recommend you to try `Body8` models trained on combined datasets, see [here](#body-2d).
+
+| Detection Config | Pose Config | Input Size
+(Det/Pose) | Model AP
(COCO) | Pipeline AP
(COCO) | Params (M)
(Det/Pose) | Flops (G)
(Det/Pose) | ORT-Latency(ms)
(i7-11700) | TRT-FP16-Latency(ms)
(GTX 1660Ti) | Download | +| :------------------------------------------------------------------ | :---------------------------------------------------------------------------- | :---------------------------: | :---------------------: | :------------------------: | :---------------------------: | :--------------------------: | :--------------------------------: | :---------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
67.1 | 64.4 | 0.99
3.34 | 0.31
0.36 | 12.403 | 2.467 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
71.1 | 68.5 | 0.99
5.47 | 0.31
0.68 | 16.658 | 2.730 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
75.3 | 73.2 | 0.99
13.59 | 0.31
1.93 | 26.613 | 4.312 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
76.3 | 74.2 | 0.99
27.66 | 0.31
4.16 | 36.311 | 4.644 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
75.3 | 75.7 | 24.66
13.59 | 38.95
1.93 | - | 6.923 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
76.3 | 76.6 | 24.66
27.66 | 38.95
4.16 | - | 7.204 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | + +## 📊 Model Zoo [🔝](#-table-of-contents) + +**Notes** + +- Since all models are trained on multi-domain combined datasets for practical applications, results are **not** suitable for academic comparison. +- More results of RTMPose on public benchmarks can refer to [Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html) +- Flip test is used. +- Inference speed measured on more hardware platforms can refer to [Benchmark](./benchmark/README.md) +- If you have datasets you would like us to support, feel free to [contact us](https://docs.google.com/forms/d/e/1FAIpQLSfzwWr3eNlDzhU98qzk2Eph44Zio6hi5r0iSwfO9wSARkHdWg/viewform?usp=sf_link)/[联系我们](https://uua478.fanqier.cn/f/xxmynrki). + +### Body 2d + +#### 17 Keypoints + +- Keypoints are defined as [COCO](http://cocodataset.org/). For details please refer to the [meta info](/configs/_base_/datasets/coco.py). +-
+
(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 91.28 | 63.38 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 92.95 | 66.19 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 94.13 | 68.53 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 94.35 | 68.98 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 94.32 | 69.85 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 94.54 | 70.14 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth) | + +
+
+AIC+COCO
+ +| Config | Input Size | AP(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 91.28 | 63.38 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 92.95 | 66.19 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 94.13 | 68.53 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 94.35 | 68.98 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 94.32 | 69.85 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 94.54 | 70.14 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth) | + +
+
(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.9 | 91.44 | 63.18 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.7 | 92.45 | 65.15 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 74.9 | 94.25 | 68.59 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.7 | 95.08 | 70.14 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 76.6 | 94.64 | 70.38 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 78.3 | 95.36 | 71.58 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_coco-384x288.py) | 384x288 | 78.8 | - | - | 49.43 | 17.22 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.zip) | + +
+
+Body8
+ +- `*` denotes model trained on 7 public datasets: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) +- `Body8` denotes the addition of the [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) dataset, in addition to the 7 datasets mentioned above, for evaluation. + +| Config | Input Size | AP(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.9 | 91.44 | 63.18 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.7 | 92.45 | 65.15 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 74.9 | 94.25 | 68.59 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.7 | 95.08 | 70.14 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 76.6 | 94.64 | 70.38 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 78.3 | 95.36 | 71.58 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_coco-384x288.py) | 384x288 | 78.8 | - | - | 49.43 | 17.22 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.zip) | + +
+ +
+Detetors:
+
+| Detection Config | Input Size | Model AP
+
+Detetors:
+
+| Detection Config | Input Size | Model AP
(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-tiny](./rtmdet/person/rtmdet_tiny_8xb32-300e_humanart.py) | 640x640 | 46.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_tiny_8xb32-300e_humanart-7da5554e.pth) | +| [RTMDet-s](./rtmdet/person/rtmdet_s_8xb32-300e_humanart.py) | 640x640 | 50.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_s_8xb32-300e_humanart-af5bd52d.pth) | +| [YOLOX-nano](./yolox/humanart/yolox_nano_8xb8-300e_humanart.py) | 640x640 | 38.9 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_nano_8xb8-300e_humanart-40f6f0d0.pth) | +| [YOLOX-tiny](./yolox/humanart/yolox_tiny_8xb8-300e_humanart.py) | 640x640 | 47.7 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_tiny_8xb8-300e_humanart-6f3252f9.pth) | +| [YOLOX-s](./yolox/humanart/yolox_s_8xb8-300e_humanart.py) | 640x640 | 54.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_s_8xb8-300e_humanart-3ef259a7.pth) | +| [YOLOX-m](./yolox/humanart/yolox_m_8xb8-300e_humanart.py) | 640x640 | 59.1 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_m_8xb8-300e_humanart-c2c7a14a.pth) | +| [YOLOX-l](./yolox/humanart/yolox_l_8xb8-300e_humanart.py) | 640x640 | 60.2 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_l_8xb8-300e_humanart-ce1d7a62.pth) | +| [YOLOX-x](./yolox/humanart/yolox_x_8xb8-300e_humanart.py) | 640x640 | 61.3 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_x_8xb8-300e_humanart-a39d44ed.pth) | + +Pose Estimators: + +| Config | Input Size | AP
(Human-Art GT) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :-----------------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.5 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.8 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 72.8 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 75.3 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.zip) | + +
+
+#### 26 Keypoints
+
+- Keypoints are defined as [Halpe26](https://github.com/Fang-Haoshu/Halpe-FullBody/). For details please refer to the [meta info](/configs/_base_/datasets/halpe26.py).
+- Human-Art
+ +- RTMPose for Human-Centric Artificial Scenes is supported by [Human-Art](https://github.com/IDEA-Research/HumanArt) +-(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-tiny](./rtmdet/person/rtmdet_tiny_8xb32-300e_humanart.py) | 640x640 | 46.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_tiny_8xb32-300e_humanart-7da5554e.pth) | +| [RTMDet-s](./rtmdet/person/rtmdet_s_8xb32-300e_humanart.py) | 640x640 | 50.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_s_8xb32-300e_humanart-af5bd52d.pth) | +| [YOLOX-nano](./yolox/humanart/yolox_nano_8xb8-300e_humanart.py) | 640x640 | 38.9 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_nano_8xb8-300e_humanart-40f6f0d0.pth) | +| [YOLOX-tiny](./yolox/humanart/yolox_tiny_8xb8-300e_humanart.py) | 640x640 | 47.7 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_tiny_8xb8-300e_humanart-6f3252f9.pth) | +| [YOLOX-s](./yolox/humanart/yolox_s_8xb8-300e_humanart.py) | 640x640 | 54.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_s_8xb8-300e_humanart-3ef259a7.pth) | +| [YOLOX-m](./yolox/humanart/yolox_m_8xb8-300e_humanart.py) | 640x640 | 59.1 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_m_8xb8-300e_humanart-c2c7a14a.pth) | +| [YOLOX-l](./yolox/humanart/yolox_l_8xb8-300e_humanart.py) | 640x640 | 60.2 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_l_8xb8-300e_humanart-ce1d7a62.pth) | +| [YOLOX-x](./yolox/humanart/yolox_x_8xb8-300e_humanart.py) | 640x640 | 61.3 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_x_8xb8-300e_humanart-a39d44ed.pth) | + +Pose Estimators: + +| Config | Input Size | AP
(Human-Art GT) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :-----------------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.5 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.8 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 72.8 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 75.3 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.zip) | + +
(Body8) | AUC
(Body8) | Params(M) | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------------------: | :--------: | :---------------------: | :-----------------: | :-------: | :------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 91.89 | 66.35 | 3.51 | 0.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 93.01 | 68.62 | 5.70 | 0.70 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 94.75 | 71.91 | 13.93 | 1.95 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 95.37 | 73.19 | 28.11 | 4.19 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.15 | 73.56 | 14.06 | 4.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.56 | 74.38 | 28.24 | 9.40 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py) | 384x288 | 95.74 | 74.82 | 50.00 | 17.29 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.zip) | + +#### Model Pruning + +**Notes** + +- Model pruning is supported by [MMRazor](https://github.com/open-mmlab/mmrazor) + +| Config | Input Size | AP
(COCO) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------: | :--------: | :---------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMPose-s-aic-coco-pruned | 256x192 | 69.4 | 3.43 | 0.35 | - | - | - | [pth](https://download.openmmlab.com/mmrazor/v1/pruning/group_fisher/rtmpose-s/group_fisher_finetune_rtmpose-s_8xb256-420e_aic-coco-256x192.pth) | + +For more details, please refer to [GroupFisher Pruning for RTMPose](./rtmpose/pruning/README.md). + +### WholeBody 2d (133 Keypoints) + +- Keypoints are defined as [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/). For details please refer to the [meta info](/configs/_base_/datasets/coco_wholebody.py). +-
+
+
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 58.2 | 67.4 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 61.1 | 70.0 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 64.8 | 73.0 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth) | +| [RTMPose-x](./rtmpose/wholebody_2d_keypoint/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 65.3 | 73.3 | 18.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-coco-wholebody_pt-body7_270e-384x288-401dfc90_20230629.pth) | + +
+
+COCO-WholeBody
+ +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 58.2 | 67.4 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 61.1 | 70.0 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 64.8 | 73.0 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth) | +| [RTMPose-x](./rtmpose/wholebody_2d_keypoint/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 65.3 | 73.3 | 18.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-coco-wholebody_pt-body7_270e-384x288-401dfc90_20230629.pth) | + +
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMW-m](./rtmpose/wholebody_2d_keypoint/rtmw-m_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 58.2 | 67.3 | 4.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-m-s_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 66.0 | 74.6 | 7.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 67.2 | 75.2 | 13.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.1 | 78.0 | 17.7 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-384x288_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.2 | 78.1 | 29.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth) | + +
+
+Cocktail14
+ +- `Cocktail14` denotes model trained on 14 public datasets: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) + - [COCO-Wholebody](https://github.com/jin-s13/COCO-WholeBody/) + - [UBody](https://github.com/IDEA-Research/OSX) + - [Human-Art](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#human-art-dataset) + - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html) + - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/) + - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/) + - [LaPa](https://github.com/JDAI-CV/lapa-dataset) + - [InterHand](https://mks0601.github.io/InterHand2.6M/) + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMW-m](./rtmpose/wholebody_2d_keypoint/rtmw-m_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 58.2 | 67.3 | 4.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-m-s_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 66.0 | 74.6 | 7.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 67.2 | 75.2 | 13.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.1 | 78.0 | 17.7 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-384x288_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.2 | 78.1 | 29.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth) | + +
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-t](./rtmpose/wholebody_2d_keypoint/rtmpose-t_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 48.5 | 58.4 | 0.5 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth) | +| [RTMPose-s](./rtmpose/wholebody_2d_keypoint/rtmpose-s_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 53.8 | 63.2 | 0.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.zip) | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.6 | 69.5 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.1 | 71.7 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 66.5 | 74.3 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.zip) | + +
+
+### Animal 2d (17 Keypoints)
+
+- Keypoints are defined as [AP-10K](https://github.com/AlexTheBad/AP-10K/). For details please refer to the [meta info](/configs/_base_/datasets/ap10k.py).
+- COCO+UBody
+ +- DWPose Models are supported by [DWPose](https://github.com/IDEA-Research/DWPose) +- Models are trained and distilled on: + - [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) + - [UBody](https://github.com/IDEA-Research/OSX) + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-t](./rtmpose/wholebody_2d_keypoint/rtmpose-t_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 48.5 | 58.4 | 0.5 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth) | +| [RTMPose-s](./rtmpose/wholebody_2d_keypoint/rtmpose-s_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 53.8 | 63.2 | 0.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.zip) | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.6 | 69.5 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.1 | 71.7 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 66.5 | 74.3 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.zip) | + +
+
+| Config | Input Size | AP(AP10K) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-m](./rtmpose/animal_2d_keypoint/rtmpose-m_8xb64-210e_ap10k-256x256.py) | 256x256 | 72.2 | 2.57 | 14.157 | 2.404 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.zip) | + +### Face 2d (106 Keypoints) + +- Keypoints are defined as [LaPa](https://github.com/JDAI-CV/lapa-dataset). For details please refer to the [meta info](/configs/_base_/datasets/lapa.py). +-
+
(LaPa) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-t\*](./rtmpose/face_2d_keypoint/rtmpose-t_8xb256-120e_lapa-256x256.py) | 256x256 | 1.67 | 0.652 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.zip) | +| [RTMPose-s\*](./rtmpose/face_2d_keypoint/rtmpose-s_8xb256-120e_lapa-256x256.py) | 256x256 | 1.59 | 1.119 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.zip) | +| [RTMPose-m\*](./rtmpose/face_2d_keypoint/rtmpose-m_8xb256-120e_lapa-256x256.py) | 256x256 | 1.44 | 2.852 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.zip) | + +
+
+### Hand 2d (21 Keypoints)
+
+- Keypoints are defined as [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/). For details please refer to the [meta info](/configs/_base_/datasets/coco_wholebody_hand.py).
+- Face6
+ +- `Face6` and `*` denote model trained on 6 public datasets: + - [COCO-Wholebody-Face](https://github.com/jin-s13/COCO-WholeBody/) + - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html) + - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/) + - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/) + - [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/) + - [LaPa](https://github.com/JDAI-CV/lapa-dataset) + +| Config | Input Size | NME(LaPa) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-t\*](./rtmpose/face_2d_keypoint/rtmpose-t_8xb256-120e_lapa-256x256.py) | 256x256 | 1.67 | 0.652 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.zip) | +| [RTMPose-s\*](./rtmpose/face_2d_keypoint/rtmpose-s_8xb256-120e_lapa-256x256.py) | 256x256 | 1.59 | 1.119 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.zip) | +| [RTMPose-m\*](./rtmpose/face_2d_keypoint/rtmpose-m_8xb256-120e_lapa-256x256.py) | 256x256 | 1.44 | 2.852 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.zip) | + +
+
+| Detection Config | Input Size | Model AP(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-nano
(alpha version)](./rtmdet/hand/rtmdet_nano_320-8xb32_hand.py) | 320x320 | 76.0 | 0.31 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmdet_nano_8xb32-300e_hand-267f9c8f.zip) | + +
+
(COCO-Wholebody-Hand) | PCK@0.2
(Hand5) | AUC
(Hand5) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :-------------------------------------------------------------------------------------------------------------------: | :--------: | :-----------------------------------: | :---------------------: | :-----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-m\*
(alpha version)](./rtmpose/hand_2d_keypoint/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 81.5 | 96.4 | 83.9 | 2.581 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.zip) | + +
+
+### Pretrained Models
+
+We provide the UDP pretraining configs of the CSPNeXt backbone. Find more details in the [pretrain_cspnext_udp folder](./rtmpose/pretrain_cspnext_udp/).
+
+Hand5
+ +- `Hand5` and `*` denote model trained on 5 public datasets: + - [COCO-Wholebody-Hand](https://github.com/jin-s13/COCO-WholeBody/) + - [OneHand10K](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) + - [FreiHand2d](https://lmb.informatik.uni-freiburg.de/projects/freihand/) + - [RHD2d](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html) + - [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/) + +| Config | Input Size | PCK@0.2(COCO-Wholebody-Hand) | PCK@0.2
(Hand5) | AUC
(Hand5) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :-------------------------------------------------------------------------------------------------------------------: | :--------: | :-----------------------------------: | :---------------------: | :-----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-m\*
(alpha version)](./rtmpose/hand_2d_keypoint/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 81.5 | 96.4 | 83.9 | 2.581 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.zip) | + +
+
(M) | Flops
(G) | AP
(GT) | AR
(GT) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------------: | :-------------: | :---------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 256x192 | 6.03 | 1.43 | 65.5 | 68.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth) | +| CSPNeXt-s | 256x192 | 8.58 | 1.78 | 70.0 | 73.3 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth) | +| CSPNeXt-m | 256x192 | 17.53 | 3.05 | 74.8 | 77.7 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth) | +| CSPNeXt-l | 256x192 | 32.44 | 5.32 | 77.2 | 79.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth) | + +
+
+AIC+COCO
+ +| Model | Input Size | Params(M) | Flops
(G) | AP
(GT) | AR
(GT) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------------: | :-------------: | :---------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 256x192 | 6.03 | 1.43 | 65.5 | 68.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth) | +| CSPNeXt-s | 256x192 | 8.58 | 1.78 | 70.0 | 73.3 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth) | +| CSPNeXt-m | 256x192 | 17.53 | 3.05 | 74.8 | 77.7 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth) | +| CSPNeXt-l | 256x192 | 32.44 | 5.32 | 77.2 | 79.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth) | + +
+
(M) | Flops
(G) | AP
(COCO) | PCK@0.2
(Body8) | AUC
(Body8) | Download | +| :------------: | :--------: | :----------------: | :---------------: | :---------------: | :---------------------: | :-----------------: | :--------------------------------------------------------------------------------: | +| CSPNeXt-tiny\* | 256x192 | 6.03 | 1.43 | 65.9 | 96.34 | 63.80 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth) | +| CSPNeXt-s\* | 256x192 | 8.58 | 1.78 | 68.7 | 96.59 | 64.92 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-body7_210e-256x192-8c9ccbdb_20230504.pth) | +| CSPNeXt-m\* | 256x192 | 17.53 | 3.05 | 73.7 | 97.42 | 68.19 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-256x192-e0c9327b_20230504.pth) | +| CSPNeXt-l\* | 256x192 | 32.44 | 5.32 | 75.7 | 97.76 | 69.57 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-256x192-5e9558ef_20230504.pth) | +| CSPNeXt-m\* | 384x288 | 17.53 | 6.86 | 75.8 | 97.60 | 70.18 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-384x288-b9bc2b57_20230504.pth) | +| CSPNeXt-l\* | 384x288 | 32.44 | 11.96 | 77.2 | 97.89 | 71.23 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-384x288-b15bc30d_20230504.pth) | +| CSPNeXt-x\* | 384x288 | 54.92 | 19.96 | 78.1 | 98.00 | 71.79 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth) | + +
+
+#### ImageNet
+
+We also provide the ImageNet classification pre-trained weights of the CSPNeXt backbone. Find more details in [RTMDet](https://github.com/open-mmlab/mmdetection/blob/latest/configs/rtmdet/README.md#classification).
+
+| Model | Input Size | ParamsBody8
+ +- `*` denotes model trained on 7 public datasets: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) +- `Body8` denotes the addition of the [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) dataset, in addition to the 7 datasets mentioned above, for evaluation. + +| Model | Input Size | Params(M) | Flops
(G) | AP
(COCO) | PCK@0.2
(Body8) | AUC
(Body8) | Download | +| :------------: | :--------: | :----------------: | :---------------: | :---------------: | :---------------------: | :-----------------: | :--------------------------------------------------------------------------------: | +| CSPNeXt-tiny\* | 256x192 | 6.03 | 1.43 | 65.9 | 96.34 | 63.80 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth) | +| CSPNeXt-s\* | 256x192 | 8.58 | 1.78 | 68.7 | 96.59 | 64.92 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-body7_210e-256x192-8c9ccbdb_20230504.pth) | +| CSPNeXt-m\* | 256x192 | 17.53 | 3.05 | 73.7 | 97.42 | 68.19 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-256x192-e0c9327b_20230504.pth) | +| CSPNeXt-l\* | 256x192 | 32.44 | 5.32 | 75.7 | 97.76 | 69.57 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-256x192-5e9558ef_20230504.pth) | +| CSPNeXt-m\* | 384x288 | 17.53 | 6.86 | 75.8 | 97.60 | 70.18 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-384x288-b9bc2b57_20230504.pth) | +| CSPNeXt-l\* | 384x288 | 32.44 | 11.96 | 77.2 | 97.89 | 71.23 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-384x288-b15bc30d_20230504.pth) | +| CSPNeXt-x\* | 384x288 | 54.92 | 19.96 | 78.1 | 98.00 | 71.79 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth) | + +
(M) | Flops
(G) | Top-1 (%) | Top-5 (%) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------: | :-------: | :---------------------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 224x224 | 2.73 | 0.34 | 69.44 | 89.45 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-tiny_imagenet_600e-3a2dd350.pth) | +| CSPNeXt-s | 224x224 | 4.89 | 0.66 | 74.41 | 92.23 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-s_imagenet_600e-ea671761.pth) | +| CSPNeXt-m | 224x224 | 13.05 | 1.93 | 79.27 | 94.79 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth) | +| CSPNeXt-l | 224x224 | 27.16 | 4.19 | 81.30 | 95.62 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth) | +| CSPNeXt-x | 224x224 | 48.85 | 7.76 | 82.10 | 95.69 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-x_8xb256-rsb-a1-600e_in1k-b3f78edd.pth) | + +## 👀 Visualization [🔝](#-table-of-contents) + +
+ +
+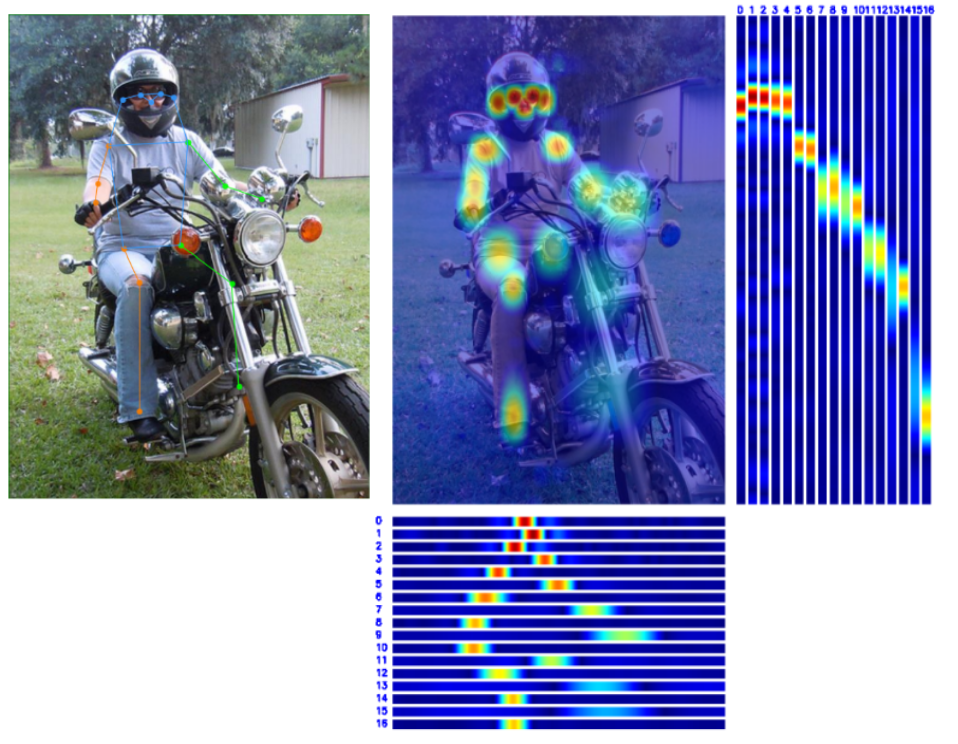 +
+
+
+## 😎 Get Started [🔝](#-table-of-contents)
+
+We provide two appoaches to try RTMPose:
+
+- [Online RTMPose Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose)
+- [Examples](https://github.com/open-mmlab/mmpose/tree/dev-1.x/projects/rtmpose/examples/onnxruntime) based on Python and ONNXRuntime (without mmcv)
+- MMPose demo scripts (based on Pytorch)
+- Pre-compiled MMDeploy SDK (Recommended, 6-10 times faster)
+
+### MMPose demo scripts
+
+MMPose provides demo scripts to conduct [inference with existing models](https://mmpose.readthedocs.io/en/latest/user_guides/inference.html).
+
+**Note:**
+
+- Inferencing with Pytorch can not reach the maximum speed of RTMPose, just for verification.
+- Model file can be either a local path or a download link
+
+```shell
+# go to the mmpose folder
+cd ${PATH_TO_MMPOSE}
+
+# inference with rtmdet
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input {YOUR_TEST_IMG_or_VIDEO} \
+ --show
+
+# inference with webcam
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input webcam \
+ --show
+```
+
+Result is as follows:
+
+
+
+### Pre-compiled MMDeploy SDK (Recommended)
+
+MMDeploy provides a precompiled SDK for Pipeline reasoning on RTMPose projects, where the model used for reasoning is the SDK version.
+
+- All models must by exported by `tools/deploy.py` before PoseTracker can be used for inference.
+- For the tutorial of exporting the SDK version model, see [SDK Reasoning](#%EF%B8%8F-step3-inference-with-sdk), and for detailed parameter settings of inference, see [Pipeline Reasoning](#-step4-pipeline-inference).
+- Exported SDK models (ONNX, TRT, ncnn, etc.) can be downloaded from [OpenMMLab Deploee](https://platform.openmmlab.com/deploee).
+- You can also convert `.pth` models into SDK [online](https://platform.openmmlab.com/deploee/task-convert-list).
+
+#### Linux
+
+Env Requirements:
+
+- GCC >= 7.5
+- cmake >= 3.20
+
+##### Python Inference
+
+1. Install mmdeploy_runtime or mmdeploy_runtime_gpu
+
+```shell
+# for onnxruntime
+pip install mmdeploy-runtime
+
+# for onnxruntime-gpu / tensorrt
+pip install mmdeploy-runtime-gpu
+```
+
+2. Download Pre-compiled files.
+
+```shell
+# onnxruntime
+# for ubuntu
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+# unzip then add third party runtime libraries to the PATH
+
+# for centos7 and lower
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64.tar.gz
+# unzip then add third party runtime libraries to the PATH
+
+# onnxruntime-gpu / tensorrt
+# for ubuntu
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+# unzip then add third party runtime libraries to the PATH
+
+# for centos7 and lower
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cuda11.3.tar.gz
+# unzip then add third party runtime libraries to the PATH
+```
+
+3. Download the sdk models and unzip to `./example/python`. (If you need other models, please export sdk models refer to [SDK Reasoning](#%EF%B8%8F-step3-inference-with-sdk))
+
+```shell
+# rtmdet-nano + rtmpose-m for cpu sdk
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmpose-cpu.zip
+
+unzip rtmpose-cpu.zip
+```
+
+4. Inference with `pose_tracker.py`:
+
+```shell
+# go to ./example/python
+
+# Please pass the folder of the model, not the model file
+# Format:
+# python pose_tracker.py cpu {det work-dir} {pose work-dir} {your_video.mp4}
+
+# Example:
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4
+
+# webcam
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0
+```
+
+##### ONNX
+
+```shell
+# Download pre-compiled files
+wget https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# Unzip files
+tar -xzvf mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# Go to the sdk folder
+cd mmdeploy-1.0.0-linux-x86_64-cxx11abi
+
+# Init environment
+source set_env.sh
+
+# If opencv 3+ is not installed on your system, execute the following command.
+# If it is installed, skip this command
+bash install_opencv.sh
+
+# Compile executable programs
+bash build_sdk.sh
+
+# Inference for an image
+# Please pass the folder of the model, not the model file
+./bin/det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cpu
+
+# Inference for a video
+# Please pass the folder of the model, not the model file
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cpu
+
+# Inference using webcam
+# Please pass the folder of the model, not the model file
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0 --device cpu
+```
+
+##### TensorRT
+
+```shell
+# Download pre-compiled files
+wget https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+
+# Unzip files
+tar -xzvf mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+
+# Go to the sdk folder
+cd mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3
+
+# Init environment
+source set_env.sh
+
+# If opencv 3+ is not installed on your system, execute the following command.
+# If it is installed, skip this command
+bash install_opencv.sh
+
+# Compile executable programs
+bash build_sdk.sh
+
+# Inference for an image
+# Please pass the folder of the model, not the model file
+./bin/det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cuda
+
+# Inference for a video
+# Please pass the folder of the model, not the model file
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cuda
+
+# Inference using webcam
+# Please pass the folder of the model, not the model file
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0 --device cuda
+```
+
+For details, see [Pipeline Inference](#-step4-pipeline-inference).
+
+#### Windows
+
+##### Python Inference
+
+1. Install mmdeploy_runtime or mmdeploy_runtime_gpu
+
+```shell
+# for onnxruntime
+pip install mmdeploy-runtime
+# download [sdk](https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-windows-amd64.zip) add third party runtime libraries to the PATH
+
+# for onnxruntime-gpu / tensorrt
+pip install mmdeploy-runtime-gpu
+# download [sdk](https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-windows-amd64-cuda11.3.zip) add third party runtime libraries to the PATH
+```
+
+2. Download the sdk models and unzip to `./example/python`. (If you need other models, please export sdk models refer to [SDK Reasoning](#%EF%B8%8F-step3-inference-with-sdk))
+
+```shell
+# rtmdet-nano + rtmpose-m for cpu sdk
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmpose-cpu.zip
+
+unzip rtmpose-cpu.zip
+```
+
+3. Inference with `pose_tracker.py`:
+
+```shell
+# go to ./example/python
+# Please pass the folder of the model, not the model file
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4
+
+# Inference using webcam
+# Please pass the folder of the model, not the model file
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0
+```
+
+##### Executable Inference
+
+1. Install [CMake](https://cmake.org/download/).
+2. Download the [pre-compiled SDK](https://github.com/open-mmlab/mmdeploy/releases).
+3. Unzip the SDK and go to the `sdk` folder.
+4. open windows powerShell with administrator privileges
+
+```shell
+set-ExecutionPolicy RemoteSigned
+```
+
+5. Install OpenCV:
+
+```shell
+# in sdk folder:
+.\install_opencv.ps1
+```
+
+6. Set environment variables:
+
+```shell
+# in sdk folder:
+. .\set_env.ps1
+```
+
+7. Compile the SDK:
+
+```shell
+# in sdk folder:
+# (if you installed opencv by .\install_opencv.ps1)
+.\build_sdk.ps1
+# (if you installed opencv yourself)
+.\build_sdk.ps1 "path/to/folder/of/OpenCVConfig.cmake"
+```
+
+8. the executable will be generated in:
+
+```shell
+example\cpp\build\Release
+```
+
+### MMPose demo scripts
+
+MMPose provides demo scripts to conduct [inference with existing models](https://mmpose.readthedocs.io/en/latest/user_guides/inference.html).
+
+**Note:**
+
+- Inferencing with Pytorch can not reach the maximum speed of RTMPose, just for verification.
+
+```shell
+# go to the mmpose folder
+cd ${PATH_TO_MMPOSE}
+
+# inference with rtmdet
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ {PATH_TO_CHECKPOINT}/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ {PATH_TO_CHECKPOINT}/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input {YOUR_TEST_IMG_or_VIDEO} \
+ --show
+
+# inference with webcam
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ {PATH_TO_CHECKPOINT}/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ {PATH_TO_CHECKPOINT}/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input webcam \
+ --show
+```
+
+Result is as follows:
+
+
+
+## 👨🏫 How to Train [🔝](#-table-of-contents)
+
+Please refer to [Train and Test](https://mmpose.readthedocs.io/en/latest/user_guides/train_and_test.html).
+
+**Tips**:
+
+- Please accordinally reduce `batch_size` and `base_lr` when your dataset is small.
+- Guidelines to choose a model
+ - m: Recommended and Preferred Use
+ - t/s: For mobile devices with extremely low computing power, or scenarios with stringent inference speed requirements
+ - l: Suitable for scenarios with strong computing power and not sensitive to speed
+
+## 🏗️ How to Deploy [🔝](#-table-of-contents)
+
+Here is a basic example of deploy RTMPose with [MMDeploy](https://github.com/open-mmlab/mmdeploy/tree/main).
+
+- Exported SDK models (ONNX, TRT, ncnn, etc.) can be downloaded from [OpenMMLab Deploee](https://platform.openmmlab.com/deploee).
+- You can also convert `.pth` models into SDK [online](https://platform.openmmlab.com/deploee/task-convert-list).
+
+### 🧩 Step1. Install MMDeploy
+
+Before starting the deployment, please make sure you install MMPose and MMDeploy correctly.
+
+- Install MMPose, please refer to the [MMPose installation guide](https://mmpose.readthedocs.io/en/latest/installation.html).
+- Install MMDeploy, please refer to the [MMDeploy installation guide](https://mmdeploy.readthedocs.io/en/latest/get_started.html#installation).
+
+Depending on the deployment backend, some backends require compilation of custom operators, so please refer to the corresponding document to ensure the environment is built correctly according to your needs:
+
+- [ONNX](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/onnxruntime.html)
+- [TensorRT](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/tensorrt.html)
+- [OpenVINO](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/openvino.html)
+- [TorchScript](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/torchscript.html)
+- [More](https://github.com/open-mmlab/mmdeploy/tree/main/docs/en/05-supported-backends)
+
+### 🛠️ Step2. Convert Model
+
+After the installation, you can enjoy the model deployment journey starting from converting PyTorch model to backend model by running MMDeploy's `tools/deploy.py`.
+
+The detailed model conversion tutorial please refer to the [MMDeploy document](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/convert_model.html). Here we only give the example of converting RTMPose.
+
+Here we take converting RTMDet-nano and RTMPose-m to ONNX/TensorRT as an example.
+
+- ONNX
+ - [`detection_onnxruntime_static.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmdet/detection/detection_onnxruntime_static.py) for RTMDet.
+ - [`pose-detection_simcc_onnxruntime_dynamic.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py) for RTMPose.
+- TensorRT
+ - [`detection_tensorrt_static-320x320.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmdet/detection/detection_tensorrt_static-320x320.py) for RTMDet.
+ - [`pose-detection_simcc_tensorrt_dynamic-256x192.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py) for RTMPose.
+- More
+ | Backend | Config |
+ | :---------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+ | ncnn-fp16 | [pose-detection_simcc_ncnn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_ncnn-fp16_static-256x192.py) |
+ | CoreML | [pose-detection_simcc_coreml_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_coreml_static-256x192.py) |
+ | OpenVINO | [pose-detection_simcc_openvino_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_openvino_static-256x192.py) |
+ | RKNN | [pose-detection_simcc_rknn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_rknn-fp16_static-256x192.py) |
+ | TorchScript | [pose-detection_torchscript.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_torchscript.py) |
+
+If you want to customize the settings in the deployment config for your requirements, please refer to [MMDeploy config tutorial](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/write_config.html).
+
+In this tutorial, we organize files as follows:
+
+```shell
+|----mmdeploy
+|----mmdetection
+|----mmpose
+```
+
+#### ONNX
+
+```shell
+# go to the mmdeploy folder
+cd ${PATH_TO_MMDEPLOY}
+
+# run the command to convert RTMDet
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmdet/detection/detection_onnxruntime_static.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmdet-nano \
+ --device cpu \
+ --show \
+ --dump-info # dump sdk info
+
+# run the command to convert RTMPose
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # dump sdk info
+```
+
+The converted model file is `{work-dir}/end2end.onnx` by defaults.
+
+#### TensorRT
+
+```shell
+# go to the mmdeploy folder
+cd ${PATH_TO_MMDEPLOY}
+
+# run the command to convert RTMDet
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmdet/detection/detection_tensorrt_static-320x320.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmdet-nano \
+ --device cuda:0 \
+ --show \
+ --dump-info # dump sdk info
+
+# run the command to convert RTMPose
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmpose-m \
+ --device cuda:0 \
+ --show \
+ --dump-info # dump sdk info
+```
+
+The converted model file is `{work-dir}/end2end.engine` by defaults.
+
+🎊 If the script runs successfully, you will see the following files:
+
+
+
+#### Advanced Setting
+
+To convert the model with TRT-FP16, you can enable the fp16 mode in your deploy config:
+
+```Python
+# in MMDeploy config
+backend_config = dict(
+ type='tensorrt',
+ common_config=dict(
+ fp16_mode=True # enable fp16
+ ))
+```
+
+### 🕹️ Step3. Inference with SDK
+
+We provide both Python and C++ inference API with MMDeploy SDK.
+
+To use SDK, you need to dump the required info during converting the model. Just add --dump-info to the model conversion command.
+
+```shell
+# RTMDet
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmdet/detection/detection_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmdet-nano \
+ --device cpu \
+ --show \
+ --dump-info # dump sdk info
+
+# RTMPose
+# Model file can be either a local path or a download link
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # dump sdk info
+```
+
+After running the command, it will dump 3 json files additionally for the SDK:
+
+```shell
+|----{work-dir}
+ |----end2end.onnx # ONNX model
+ |----end2end.engine # TensorRT engine file
+
+ |----pipeline.json #
+ |----deploy.json # json files for the SDK
+ |----detail.json #
+```
+
+#### Python API
+
+Here is a basic example of SDK Python API:
+
+```Python
+# Copyright (c) OpenMMLab. All rights reserved.
+import argparse
+
+import cv2
+import numpy as np
+from mmdeploy_runtime import PoseDetector
+
+
+def parse_args():
+ parser = argparse.ArgumentParser(
+ description='show how to use sdk python api')
+ parser.add_argument('device_name', help='name of device, cuda or cpu')
+ parser.add_argument(
+ 'model_path',
+ help='path of mmdeploy SDK model dumped by model converter')
+ parser.add_argument('image_path', help='path of an image')
+ parser.add_argument(
+ '--bbox',
+ default=None,
+ nargs='+',
+ type=int,
+ help='bounding box of an object in format (x, y, w, h)')
+ args = parser.parse_args()
+ return args
+
+
+def main():
+ args = parse_args()
+
+ img = cv2.imread(args.image_path)
+
+ detector = PoseDetector(
+ model_path=args.model_path, device_name=args.device_name, device_id=0)
+
+ if args.bbox is None:
+ result = detector(img)
+ else:
+ # converter (x, y, w, h) -> (left, top, right, bottom)
+ print(args.bbox)
+ bbox = np.array(args.bbox, dtype=int)
+ bbox[2:] += bbox[:2]
+ result = detector(img, bbox)
+ print(result)
+
+ _, point_num, _ = result.shape
+ points = result[:, :, :2].reshape(point_num, 2)
+ for [x, y] in points.astype(int):
+ cv2.circle(img, (x, y), 1, (0, 255, 0), 2)
+
+ cv2.imwrite('output_pose.png', img)
+
+
+if __name__ == '__main__':
+ main()
+```
+
+#### C++ API
+
+Here is a basic example of SDK C++ API:
+
+```C++
+#include "mmdeploy/pose_detector.hpp"
+#include "opencv2/imgcodecs.hpp"
+#include "opencv2/imgproc.hpp"
+#include "utils/argparse.h" // See: https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/utils/argparse.h
+
+DEFINE_ARG_string(model_path, "Model path");
+DEFINE_ARG_string(image_path, "Input image path");
+DEFINE_string(device_name, "cpu", R"(Device name, e.g. "cpu", "cuda")");
+DEFINE_int32(bbox_x, -1, R"(x position of the bounding box)");
+DEFINE_int32(bbox_y, -1, R"(y position of the bounding box)");
+DEFINE_int32(bbox_w, -1, R"(width of the bounding box)");
+DEFINE_int32(bbox_h, -1, R"(height of the bounding box)");
+
+int main(int argc, char* argv[]) {
+ if (!utils::ParseArguments(argc, argv)) {
+ return -1;
+ }
+
+ cv::Mat img = cv::imread(ARGS_image_path);
+
+ mmdeploy::PoseDetector detector(mmdeploy::Model{ARGS_model_path}, mmdeploy::Device{FLAGS_device_name, 0});
+
+ mmdeploy::PoseDetector::Result result{0, 0, nullptr};
+
+ if (FLAGS_bbox_x == -1 || FLAGS_bbox_y == -1 || FLAGS_bbox_w == -1 || FLAGS_bbox_h == -1) {
+ result = detector.Apply(img);
+ } else {
+ // convert (x, y, w, h) -> (left, top, right, bottom)
+ mmdeploy::cxx::Rect rect;
+ rect.left = FLAGS_bbox_x;
+ rect.top = FLAGS_bbox_y;
+ rect.right = FLAGS_bbox_x + FLAGS_bbox_w;
+ rect.bottom = FLAGS_bbox_y + FLAGS_bbox_h;
+ result = detector.Apply(img, {rect});
+ }
+
+ // Draw circles at detected keypoints
+ for (size_t i = 0; i < result[0].length; ++i) {
+ cv::Point keypoint(result[0].point[i].x, result[0].point[i].y);
+ cv::circle(img, keypoint, 1, cv::Scalar(0, 255, 0), 2); // Draw filled circle
+ }
+
+ // Save the output image
+ cv::imwrite("output_pose.png", img);
+
+ return 0;
+}
+```
+
+To build C++ example, please add MMDeploy package in your CMake project as following:
+
+```CMake
+find_package(MMDeploy REQUIRED)
+target_link_libraries(${name} PRIVATE mmdeploy ${OpenCV_LIBS})
+```
+
+#### Other languages
+
+- [C# API Examples](https://github.com/open-mmlab/mmdeploy/tree/main/demo/csharp)
+- [JAVA API Examples](https://github.com/open-mmlab/mmdeploy/tree/main/demo/java)
+
+## 🚀 Step4. Pipeline Inference
+
+### Inference for images
+
+If the user has MMDeploy compiled correctly, you will see the `det_pose` executable under the `mmdeploy/build/bin/`.
+
+```shell
+# go to the mmdeploy folder
+cd ${PATH_TO_MMDEPLOY}/build/bin/
+
+# inference for an image
+./det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cpu
+
+required arguments:
+ det_model Object detection model path [string]
+ pose_model Pose estimation model path [string]
+ image Input image path [string]
+
+optional arguments:
+ --device Device name, e.g. "cpu", "cuda" [string = "cpu"]
+ --output Output image path [string = "det_pose_output.jpg"]
+ --skeleton Path to skeleton data or name of predefined skeletons:
+ "coco" [string = "coco", "coco-wholoebody"]
+ --det_label Detection label use for pose estimation [int32 = 0]
+ (0 refers to 'person' in coco)
+ --det_thr Detection score threshold [double = 0.5]
+ --det_min_bbox_size Detection minimum bbox size [double = -1]
+ --pose_thr Pose key-point threshold [double = 0]
+```
+
+#### API Example
+
+- [`det_pose.py`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/python/det_pose.py)
+- [`det_pose.cxx`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/det_pose.cxx)
+
+### Inference for a video
+
+If the user has MMDeploy compiled correctly, you will see the `pose_tracker` executable under the `mmdeploy/build/bin/`.
+
+- pass `0` to `input` can inference from a webcam
+
+```shell
+# go to the mmdeploy folder
+cd ${PATH_TO_MMDEPLOY}/build/bin/
+
+# inference for a video
+./pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cpu
+
+required arguments:
+ det_model Object detection model path [string]
+ pose_model Pose estimation model path [string]
+ input Input video path or camera index [string]
+
+optional arguments:
+ --device Device name, e.g. "cpu", "cuda" [string = "cpu"]
+ --output Output video path or format string [string = ""]
+ --output_size Long-edge of output frames [int32 = 0]
+ --flip Set to 1 for flipping the input horizontally [int32 = 0]
+ --show Delay passed to `cv::waitKey` when using `cv::imshow`;
+ -1: disable [int32 = 1]
+ --skeleton Path to skeleton data or name of predefined skeletons:
+ "coco", "coco-wholebody" [string = "coco"]
+ --background Output background, "default": original image, "black":
+ black background [string = "default"]
+ --det_interval Detection interval [int32 = 1]
+ --det_label Detection label use for pose estimation [int32 = 0]
+ (0 refers to 'person' in coco)
+ --det_thr Detection score threshold [double = 0.5]
+ --det_min_bbox_size Detection minimum bbox size [double = -1]
+ --det_nms_thr NMS IOU threshold for merging detected bboxes and
+ bboxes from tracked targets [double = 0.7]
+ --pose_max_num_bboxes Max number of bboxes used for pose estimation per frame
+ [int32 = -1]
+ --pose_kpt_thr Threshold for visible key-points [double = 0.5]
+ --pose_min_keypoints Min number of key-points for valid poses, -1 indicates
+ ceil(n_kpts/2) [int32 = -1]
+ --pose_bbox_scale Scale for expanding key-points to bbox [double = 1.25]
+ --pose_min_bbox_size Min pose bbox size, tracks with bbox size smaller than
+ the threshold will be dropped [double = -1]
+ --pose_nms_thr NMS OKS/IOU threshold for suppressing overlapped poses,
+ useful when multiple pose estimations collapse to the
+ same target [double = 0.5]
+ --track_iou_thr IOU threshold for associating missing tracks
+ [double = 0.4]
+ --track_max_missing Max number of missing frames before a missing tracks is
+ removed [int32 = 10]
+```
+
+#### API Example
+
+- [`pose_tracker.py`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/python/pose_tracker.py)
+- [`pose_tracker.cxx`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/pose_tracker.cxx)
+
+## 📚 Common Usage [🔝](#-table-of-contents)
+
+### 🚀 Inference Speed Test [🔝](#-table-of-contents)
+
+If you need to test the inference speed of the model under the deployment framework, MMDeploy provides a convenient `tools/profiler.py` script.
+
+The user needs to prepare a folder for the test images `./test_images`, the profiler will randomly read images from this directory for the model speed test.
+
+```shell
+python tools/profiler.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ ../test_images \
+ --model {WORK_DIR}/end2end.onnx \
+ --shape 256x192 \
+ --device cpu \
+ --warmup 50 \
+ --num-iter 200
+```
+
+The result is as follows:
+
+```shell
+01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS
+01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS
+01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS
+01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS
+01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS
+01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS
+----- Settings:
++------------+---------+
+| batch size | 1 |
+| shape | 256x192 |
+| iterations | 200 |
+| warmup | 50 |
++------------+---------+
+----- Results:
++--------+------------+---------+
+| Stats | Latency/ms | FPS |
++--------+------------+---------+
+| Mean | 11.060 | 90.412 |
+| Median | 11.852 | 84.375 |
+| Min | 7.812 | 128.007 |
+| Max | 13.690 | 73.044 |
++--------+------------+---------+
+```
+
+If you want to learn more details of profiler, you can refer to the [Profiler Docs](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/useful_tools.html#profiler).
+
+### 📊 Model Test [🔝](#-table-of-contents)
+
+If you need to test the inference accuracy of the model on the deployment backend, MMDeploy provides a convenient `tools/test.py` script.
+
+```shell
+python tools/test.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ --model {PATH_TO_MODEL}/rtmpose_m.pth \
+ --device cpu
+```
+
+You can also refer to [MMDeploy Docs](https://github.com/open-mmlab/mmdeploy/blob/main/docs/en/02-how-to-run/profile_model.md) for more details.
+
+## 📜 Citation [🔝](#-table-of-contents)
+
+If you find RTMPose useful in your research, please consider cite:
+
+```bibtex
+@misc{https://doi.org/10.48550/arxiv.2303.07399,
+ doi = {10.48550/ARXIV.2303.07399},
+ url = {https://arxiv.org/abs/2303.07399},
+ author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai},
+ keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences},
+ title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose},
+ publisher = {arXiv},
+ year = {2023},
+ copyright = {Creative Commons Attribution 4.0 International}
+}
+
+@misc{mmpose2020,
+ title={OpenMMLab Pose Estimation Toolbox and Benchmark},
+ author={MMPose Contributors},
+ howpublished = {\url{https://github.com/open-mmlab/mmpose}},
+ year={2020}
+}
+```
diff --git a/projects/rtmpose/README_CN.md b/projects/rtmpose/README_CN.md
new file mode 100644
index 0000000000000000000000000000000000000000..6b33a20e9fa1c80110f66bf80bcedf672ab01616
--- /dev/null
+++ b/projects/rtmpose/README_CN.md
@@ -0,0 +1,1259 @@
+
+
+
+
+
+
+# RTMPose: Real-Time Multi-Person Pose Estimation toolkit based on MMPose
+
+> [RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose](https://arxiv.org/abs/2303.07399)
+
+
+
+[English](README.md) | 简体中文
+
+
+
+______________________________________________________________________
+
+## Abstract
+
+近年来,2D 姿态估计的研究在公开数据集上取得了出色的成绩,但是它在工业界的应用仍然受到笨重的模型参数和高推理延迟的影响。为了让前沿姿态估计算法在工业界落地,我们通过实验研究了多人姿态估计算法的五个方面:范式、骨干网络、定位算法、训练策略和部署推理,基于 MMPose 提出了一个高性能的实时多人姿态估计框架 **RTMPose**。我们的 RTMPose-m 模型在 COCO 上取得 **75.8%AP**,在 Intel i7-11700 CPU 上达到 **90+FPS**,在 NVIDIA GTX 1660 Ti GPU 上达到 **430+FPS**。我们同样验证了在算力有限的设备上做实时姿态估计,RTMPose-s 在移动端骁龙865芯片上可以达到 **COCO 72.2%AP**,**70+FPS**。在 MMDeploy 的帮助下,我们的项目支持 CPU、GPU、Jetson、移动端等多种部署环境。
+
+
+
+______________________________________________________________________
+
+## 📄 Table of Contents
+
+- [🥳 🚀 最新进展](#--最新进展-)
+- [📖 简介](#-简介-)
+- [🙌 社区共建](#-社区共建-)
+- [⚡ Pipeline 性能](#-pipeline-性能-)
+- [📊 模型库](#-模型库-)
+- [👀 可视化](#-可视化-)
+- [😎 快速尝试](#-快速尝试-)
+- [👨🏫 模型训练](#-模型训练-)
+- [🏗️ 部署教程](#️-部署教程-)
+- [📚 常用功能](#️-常用功能-)
+ - [🚀 模型测速](#-模型测速-)
+ - [📊 精度验证](#-精度验证-)
+- [📜 引用](#-引用-)
+
+## 🥳 最新进展 [🔝](#-table-of-contents)
+
+- 2023 年 12 月:
+ - 更新 RTMW 模型,RTMW-l 在 COCO-Wholebody 验证集上去的 70.1 mAP。
+- 2023 年 9 月:
+ - 发布混合数据集上训练的 RTMW 模型。Alpha 版本的 RTMW-x 在 COCO-Wholebody 验证集上取得了 70.2 mAP。[在线 Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose) 已支持 RTMW。技术报告正在撰写中。
+ - 增加 HumanArt 上训练的 YOLOX 和 RTMDet 模型。
+- 2023 年 8 月:
+ - 支持基于 RTMPose 模型蒸馏的 133 点 WholeBody 模型(由 [DWPose](https://github.com/IDEA-Research/DWPose/tree/main) 提供)。
+ - 你可以在 [sd-webui-controlnet](https://github.com/Mikubill/sd-webui-controlnet) 中使用 DWPose/RTMPose 作为姿态估计后端进行人物图像生成。升级 sd-webui-controlnet >= v1.1237 并选择 `dw_openpose_full` 即可使用。
+ - [在线 Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose) 已支持 DWPose,试玩请选择 `wholebody`。
+- 2023 年 7 月:
+ - 在线 RTMPose 试玩 [Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose)。
+ - 支持面向艺术图片人体姿态估计的 17 点 Body 模型。
+- 2023 年 6 月:
+ - 发布混合数据集训练的 26 点 Body 模型。
+- 2023 年 5 月:
+ - 已导出的 SDK 模型(ONNX、TRT、ncnn 等)可以从 [OpenMMLab Deploee](https://platform.openmmlab.com/deploee) 直接下载。
+ - [在线导出](https://platform.openmmlab.com/deploee/task-convert-list) SDK 模型(ONNX、TRT、ncnn 等)。
+ - 添加 [代码示例](./examples/),包括:
+ - 纯 Python 推理代码示例,无 MMDeploy、MMCV 依赖
+ - C++ 代码示例:ONNXRuntime、TensorRT
+ - Android 项目示例:基于 ncnn
+ - 发布混合数据集训练的 Hand, Face, Body 模型。
+- 2023 年 3 月:发布 RTMPose。RTMPose-m 取得 COCO 验证集 75.8 mAP,推理速度达到 430+ FPS 。
+
+## 📖 简介 [🔝](#-table-of-contents)
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+### ✨ 主要特性
+
+- 🚀 **高精度,低延迟**
+
+ | Model | AP(COCO) | CPU-FPS | GPU-FPS |
+ | :---: | :------: | :-----: | :-----: |
+ | t | 68.5 | 300+ | 940+ |
+ | s | 72.2 | 200+ | 710+ |
+ | m | 75.8 | 90+ | 430+ |
+ | l | 76.5 | 50+ | 280+ |
+
+- 🛠️ **易部署**
+
+ - 详细的部署代码教程,手把手教你模型部署
+ - MMDeploy 助力
+ - 支持多种部署后端
+ - ONNX
+ - TensorRT
+ - ncnn
+ - OpenVINO 等
+ - 支持多种平台
+ - Linux
+ - Windows
+ - NVIDIA Jetson
+ - ARM 等
+
+- 🏗️ **为实际业务设计**
+
+ - 提供多种 Pipeline 推理接口和 SDK
+ - Python
+ - C++
+ - C#
+ - JAVA 等
+
+## 🙌 社区共建 [🔝](#-table-of-contents)
+
+RTMPose 是一个长期优化迭代的项目,致力于业务场景下的高性能实时姿态估计算法的训练、优化和部署,因此我们十分期待来自社区的力量,欢迎分享不同业务场景中 RTMPose 的训练配置与技巧,助力更多的社区用户!
+
+✨ ✨ ✨
+
+- **如果你是 RTMPose 的新用户,我们热切希望你能参与[这份问卷](https://uua478.fanqier.cn/f/xxmynrki)/[Google Questionnaire](https://docs.google.com/forms/d/e/1FAIpQLSfzwWr3eNlDzhU98qzk2Eph44Zio6hi5r0iSwfO9wSARkHdWg/viewform?usp=sf_link),这对于我们的工作非常重要!**
+
+✨ ✨ ✨
+
+欢迎加入我们的社区交流群获得更多帮助:
+
+- 微信用户群
+
+
+
+
+
+- Discord Group:
+ - 🙌 https://discord.gg/raweFPmdzG 🙌
+
+## ⚡ Pipeline 性能 [🔝](#-table-of-contents)
+
+**说明**
+
+- Pipeline 速度测试时开启了隔帧检测策略,默认检测间隔为 5 帧。
+- 环境配置:
+ - torch >= 1.7.1
+ - onnxruntime 1.12.1
+ - TensorRT 8.4.3.1
+ - cuDNN 8.3.2
+ - CUDA 11.3
+- **更新**:我们推荐你使用混合数据集训练的 `Body8` 模型,性能高于下表中提供的模型,[传送门](#人体-2d-关键点)。
+
+| Detection Config | Pose Config | Input Size
(Det/Pose) | Model AP
(COCO) | Pipeline AP
(COCO) | Params (M)
(Det/Pose) | Flops (G)
(Det/Pose) | ORT-Latency(ms)
(i7-11700) | TRT-FP16-Latency(ms)
(GTX 1660Ti) | Download | +| :------------------------------------------------------------------ | :---------------------------------------------------------------------------- | :---------------------------: | :---------------------: | :------------------------: | :---------------------------: | :--------------------------: | :--------------------------------: | :---------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
67.1 | 64.4 | 0.99
3.34 | 0.31
0.36 | 12.403 | 2.467 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
71.1 | 68.5 | 0.99
5.47 | 0.31
0.68 | 16.658 | 2.730 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
75.3 | 73.2 | 0.99
13.59 | 0.31
1.93 | 26.613 | 4.312 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
76.3 | 74.2 | 0.99
27.66 | 0.31
4.16 | 36.311 | 4.644 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
75.3 | 75.7 | 24.66
13.59 | 38.95
1.93 | - | 6.923 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
76.3 | 76.6 | 24.66
27.66 | 38.95
4.16 | - | 7.204 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | + +## 📊 模型库 [🔝](#-table-of-contents) + +**说明** + +- 此处提供的模型采用了多数据集联合训练以提高性能,模型指标不适用于学术比较。 +- 表格中为开启了 Flip Test 的测试结果。 +- RTMPose 在更多公开数据集上的性能指标可以前往 [Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html) 查看。 +- RTMPose 在更多硬件平台上的推理速度可以前往 [Benchmark](./benchmark/README_CN.md) 查看。 +- 如果你有希望我们支持的数据集,欢迎[联系我们](https://uua478.fanqier.cn/f/xxmynrki)/[Google Questionnaire](https://docs.google.com/forms/d/e/1FAIpQLSfzwWr3eNlDzhU98qzk2Eph44Zio6hi5r0iSwfO9wSARkHdWg/viewform?usp=sf_link)! + +### 人体 2d 关键点 + +#### 17 Keypoints + +- 关键点骨架定义遵循 [COCO](http://cocodataset.org/). 详情见 [meta info](/configs/_base_/datasets/coco.py). +- +
+
+
+ +- 模型在 `Body8` 上进行训练和评估。
+
+| Config | Input Size | PCK@0.1
+- 模型在 `Body8` 上进行训练和评估。
+
+| Config | Input Size | PCK@0.1
(Body8) | AUC
(Body8) | Params(M) | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------------------: | :--------: | :---------------------: | :-----------------: | :-------: | :------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 91.89 | 66.35 | 3.51 | 0.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 93.01 | 68.62 | 5.70 | 0.70 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 94.75 | 71.91 | 13.93 | 1.95 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 95.37 | 73.19 | 28.11 | 4.19 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.15 | 73.56 | 14.06 | 4.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.56 | 74.38 | 28.24 | 9.40 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py) | 384x288 | 95.74 | 74.82 | 50.00 | 17.29 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.zip) | + +#### 模型剪枝 + +**说明** + +- 模型剪枝由 [MMRazor](https://github.com/open-mmlab/mmrazor) 提供 + +| Config | Input Size | AP
(COCO) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------: | :--------: | :---------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMPose-s-aic-coco-pruned | 256x192 | 69.4 | 3.43 | 0.35 | - | - | - | [pth](https://download.openmmlab.com/mmrazor/v1/pruning/group_fisher/rtmpose-s/group_fisher_finetune_rtmpose-s_8xb256-420e_aic-coco-256x192.pth) | + +更多信息,请参考 [GroupFisher Pruning for RTMPose](./rtmpose/pruning/README.md). + +### 人体全身 2d 关键点 (133 Keypoints) + +- 关键点骨架定义遵循 [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/),详情见 [meta info](/configs/_base_/datasets/coco_wholebody.py)。 +-
+
+
+
+| Config | Input Size | AP
(AP10K) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-m](./rtmpose/animal_2d_keypoint/rtmpose-m_8xb64-210e_ap10k-256x256.py) | 256x256 | 72.2 | 2.57 | 14.157 | 2.404 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.zip) | + +### 脸部 2d 关键点 (106 Keypoints) + +- 关键点骨架定义遵循 [LaPa](https://github.com/JDAI-CV/lapa-dataset),详情见 [meta info](/configs/_base_/datasets/lapa.py)。 +- +
+
+
+| Detection Config | Input Size | Model AP
+
+
+
+| Detection Config | Input Size | Model AP
(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-nano
(alpha version)](./rtmdet/hand/rtmdet_nano_320-8xb32_hand.py) | 320x320 | 76.0 | 0.31 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmdet_nano_8xb32-300e_hand-267f9c8f.zip) | + +
(M) | Flops
(G) | Top-1 (%) | Top-5 (%) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------: | :-------: | :---------------------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 224x224 | 2.73 | 0.34 | 69.44 | 89.45 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-tiny_imagenet_600e-3a2dd350.pth) | +| CSPNeXt-s | 224x224 | 4.89 | 0.66 | 74.41 | 92.23 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-s_imagenet_600e-ea671761.pth) | +| CSPNeXt-m | 224x224 | 13.05 | 1.93 | 79.27 | 94.79 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth) | +| CSPNeXt-l | 224x224 | 27.16 | 4.19 | 81.30 | 95.62 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth) | +| CSPNeXt-x | 224x224 | 48.85 | 7.76 | 82.10 | 95.69 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-x_8xb256-rsb-a1-600e_in1k-b3f78edd.pth) | + +## 👀 可视化 [🔝](#-table-of-contents) + +
(COCO) | Params(M) | FLOPS(G) | +| :-------------------------------------------------------------------------------: | :--------: | :---------------: | :-------: | :------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 3.34 | 0.36 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 5.47 | 0.68 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 13.59 | 1.93 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 27.66 | 4.16 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 13.72 | 4.33 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 27.79 | 9.35 | + +### Speed Benchmark + +- Numbers displayed in the table are inference latencies in millisecond(ms). + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | ncnn-FP16
(Snapdragon 865) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :---------: | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 3.20 | 1.06 | 0.98 | 9.02 | 1.63 | 1.97 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 4.48 | 1.39 | 1.12 | 13.89 | 1.85 | 2.18 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 11.06 | 2.29 | 1.18 | 26.44 | 2.72 | 3.35 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 18.85 | 3.46 | 1.37 | 45.37 | 3.67 | 4.78 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 24.78 | 3.66 | 1.20 | 26.44 | 3.45 | 5.08 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | - | 6.05 | 1.74 | - | 4.93 | 7.23 | + +## WholeBody 2d (133 Keypoints) + +### Model Info + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | +| :------------------------------------------------------------------------------------------- | :--------: | :------: | :------: | :------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.4 | 66.7 | 2.22 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.2 | 69.4 | 4.52 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 67.0 | 72.3 | 10.07 | + +### Speed Benchmark + +- Numbers displayed in the table are inference latencies in millisecond(ms). +- Data from different community users are separated by `|`. + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :-------------------------------------------- | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 13.50 | 4.00 | 1.17 \| 1.84 | 2.79 | 3.51 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 23.41 | 5.67 | 1.44 \| 2.61 | 3.80 | 4.95 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 44.58 | 7.68 | 1.75 \| 4.24 | 5.08 | 7.20 | + +## How To Test Speed + +If you need to test the inference speed of the model under the deployment framework, MMDeploy provides a convenient `tools/profiler.py` script. + +The user needs to prepare a folder for the test images `./test_images`, the profiler will randomly read images from this directory for the model speed test. + +```shell +python tools/profiler.py \ + configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \ + {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \ + ../test_images \ + --model {WORK_DIR}/end2end.onnx \ + --shape 256x192 \ + --device cpu \ + --warmup 50 \ + --num-iter 200 +``` + +The result is as follows: + +```shell +01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS +01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS +01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS +01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS +01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS +01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS +----- Settings: ++------------+---------+ +| batch size | 1 | +| shape | 256x192 | +| iterations | 200 | +| warmup | 50 | ++------------+---------+ +----- Results: ++--------+------------+---------+ +| Stats | Latency/ms | FPS | ++--------+------------+---------+ +| Mean | 11.060 | 90.412 | +| Median | 11.852 | 84.375 | +| Min | 7.812 | 128.007 | +| Max | 13.690 | 73.044 | ++--------+------------+---------+ +``` + +If you want to learn more details of profiler, you can refer to the [Profiler Docs](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/useful_tools.html#profiler). diff --git a/projects/rtmpose/benchmark/README_CN.md b/projects/rtmpose/benchmark/README_CN.md new file mode 100644 index 0000000000000000000000000000000000000000..e1824d12b75580aa72fa767fda87816844cb5e3a --- /dev/null +++ b/projects/rtmpose/benchmark/README_CN.md @@ -0,0 +1,116 @@ +# RTMPose Benchmarks + +简体中文 | [English](./README.md) + +欢迎社区用户在不同硬件设备上进行推理速度测试,贡献到本项目目录下。 + +当前已测试: + +- CPU + - Intel i7-11700 +- GPU + - NVIDIA GeForce 1660 Ti + - NVIDIA GeForce RTX 3090 +- Nvidia Jetson + - AGX Orin + - Orin NX +- ARM + - Snapdragon 865 + +### 人体 2d 关键点 (17 Keypoints) + +### Model Info + +| Config | Input Size | AP
(COCO) | Params(M) | FLOPS(G) | +| :-------------------------------------------------------------------------------: | :--------: | :---------------: | :-------: | :------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 3.34 | 0.36 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 5.47 | 0.68 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 13.59 | 1.93 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 27.66 | 4.16 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 13.72 | 4.33 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 27.79 | 9.35 | + +### Speed Benchmark + +图中所示为模型推理时间,单位毫秒。 + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | ncnn-FP16
(Snapdragon 865) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :---------: | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 3.20 | 1.06 | 0.98 | 9.02 | 1.63 | 1.97 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 4.48 | 1.39 | 1.12 | 13.89 | 1.85 | 2.18 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 11.06 | 2.29 | 1.18 | 26.44 | 2.72 | 3.35 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 18.85 | 3.46 | 1.37 | 45.37 | 3.67 | 4.78 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 24.78 | 3.66 | 1.20 | 26.44 | 3.45 | 5.08 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | - | 6.05 | 1.74 | - | 4.93 | 7.23 | + +### 人体全身 2d 关键点 (133 Keypoints) + +### Model Info + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | +| :------------------------------------------------------------------------------------------- | :--------: | :------: | :------: | :------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.4 | 66.7 | 2.22 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.2 | 69.4 | 4.52 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 67.0 | 72.3 | 10.07 | + +### Speed Benchmark + +- 图中所示为模型推理时间,单位毫秒。 +- 来自不同社区用户的测试数据用 `|` 分隔开。 + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :-------------------------------------------- | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 13.50 | 4.00 | 1.17 \| 1.84 | 2.79 | 3.51 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 23.41 | 5.67 | 1.44 \| 2.61 | 3.80 | 4.95 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 44.58 | 7.68 | 1.75 \| 4.24 | 5.08 | 7.20 | + +## 如何测试推理速度 + +我们使用 MMDeploy 提供的 `tools/profiler.py` 脚本进行模型测速。 + +用户需要准备一个存放测试图片的文件夹`./test_images`,profiler 将随机从该目录下抽取图片用于模型测速。 + +```shell +python tools/profiler.py \ + configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \ + {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \ + ../test_images \ + --model {WORK_DIR}/end2end.onnx \ + --shape 256x192 \ + --device cpu \ + --warmup 50 \ + --num-iter 200 +``` + +The result is as follows: + +```shell +01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS +01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS +01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS +01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS +01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS +01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS +----- Settings: ++------------+---------+ +| batch size | 1 | +| shape | 256x192 | +| iterations | 200 | +| warmup | 50 | ++------------+---------+ +----- Results: ++--------+------------+---------+ +| Stats | Latency/ms | FPS | ++--------+------------+---------+ +| Mean | 11.060 | 90.412 | +| Median | 11.852 | 84.375 | +| Min | 7.812 | 128.007 | +| Max | 13.690 | 73.044 | ++--------+------------+---------+ +``` + +If you want to learn more details of profiler, you can refer to the [Profiler Docs](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/useful_tools.html#profiler). diff --git a/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md b/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md new file mode 100644 index 0000000000000000000000000000000000000000..edce803106ba59dbc339018a8281b1f8f282b2a0 --- /dev/null +++ b/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md @@ -0,0 +1,5 @@ +# PoseTracker-Android-Prototype + +PoseTracker Android Demo Prototype, which is based on [mmdeploy](https://github.com/open-mmlab/mmdeploy/tree/dev-1.x) + +Please refer to [Original Repository](https://github.com/hanrui1sensetime/PoseTracker-Android-Prototype). diff --git a/projects/rtmpose/examples/README.md b/projects/rtmpose/examples/README.md new file mode 100644 index 0000000000000000000000000000000000000000..5846f039e7c1e18ab853f2839c1f306e76feedb9 --- /dev/null +++ b/projects/rtmpose/examples/README.md @@ -0,0 +1,18 @@ +## List of examples + +### 1. RTMPose-Deploy + +RTMPose-Deploy is a C++ code example for RTMPose localized deployment. + +- [ONNXRuntime-CPU](https://github.com/HW140701/RTMPose-Deploy) +- [TensorRT](https://github.com/Dominic23331/rtmpose_tensorrt) + +### 2. RTMPose inference with ONNXRuntime (Python) + +This example shows how to run RTMPose inference with ONNXRuntime in Python. + +### 3. PoseTracker Android Demo + +PoseTracker Android Demo Prototype based on mmdeploy. + +- [Original Repository](https://github.com/hanrui1sensetime/PoseTracker-Android-Prototype) diff --git a/projects/rtmpose/examples/RTMPose-Deploy/README.md b/projects/rtmpose/examples/RTMPose-Deploy/README.md new file mode 100644 index 0000000000000000000000000000000000000000..c4fce9a4df617c145c19d2dd953e8621d6c8773f --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/README.md @@ -0,0 +1,12 @@ +# RTMPose-Deploy + +[中文说明](./README_CN.md) + +RTMPose-Deploy is a C ++ code example for RTMPose localized deployment. + +At present, RTMPose-Deploy has completed to use ONNXRuntime-CPU and TensorRT to deploy the RTMDet and RTMPose on the Windows system. + +| Deployment Framework | Repo | +| -------------------- | -------------------------------------------------------------------- | +| ONNXRuntime-CPU | [RTMPose-Deploy](https://github.com/HW140701/RTMPose-Deploy) | +| TensorRT | [rtmpose_tensorrt](https://github.com/Dominic23331/rtmpose_tensorrt) | diff --git a/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md b/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md new file mode 100644 index 0000000000000000000000000000000000000000..82ee093658d6bccc68832d09e5e73489a55a304b --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md @@ -0,0 +1,10 @@ +# RTMPose-Deploy + +RTMPose-Deploy 是一个进行 RTMPose 本地化部署的 C++ 代码示例。 + +目前,RTMPose-Deploy 已完成在 Windows 系统上使用 OnnxRuntime CPU 和TensorRT 对 RTMDet 和 RTMPose 完成了部署。 + +| 部署框架 | 仓库 | +| --------------- | -------------------------------------------------------------------- | +| ONNXRuntime-CPU | [RTMPose-Deploy](https://github.com/HW140701/RTMPose-Deploy) | +| TensorRT | [rtmpose_tensorrt](https://github.com/Dominic23331/rtmpose_tensorrt) | diff --git a/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h b/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h new file mode 100644 index 0000000000000000000000000000000000000000..fe586e2356776f248afd180d7b6f660696ef4ac8 --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h @@ -0,0 +1,151 @@ +#ifndef _CHARACTERSET_CONVERT_H_ +#define _CHARACTERSET_CONVERT_H_ + +#include
+
+#if defined(WIN32) || defined(_WIN32) || defined(__WIN32__) || defined(__NT__)
+
+#include
+
+#elif defined(linux) || defined(__linux)
+
+#include
+
+- Discord Group:
+ - 🙌 https://discord.gg/raweFPmdzG 🙌
+
+## ⚡ Pipeline 性能 [🔝](#-table-of-contents)
+
+**说明**
+
+- Pipeline 速度测试时开启了隔帧检测策略,默认检测间隔为 5 帧。
+- 环境配置:
+ - torch >= 1.7.1
+ - onnxruntime 1.12.1
+ - TensorRT 8.4.3.1
+ - cuDNN 8.3.2
+ - CUDA 11.3
+- **更新**:我们推荐你使用混合数据集训练的 `Body8` 模型,性能高于下表中提供的模型,[传送门](#人体-2d-关键点)。
+
+| Detection Config | Pose Config | Input Size(Det/Pose) | Model AP
(COCO) | Pipeline AP
(COCO) | Params (M)
(Det/Pose) | Flops (G)
(Det/Pose) | ORT-Latency(ms)
(i7-11700) | TRT-FP16-Latency(ms)
(GTX 1660Ti) | Download | +| :------------------------------------------------------------------ | :---------------------------------------------------------------------------- | :---------------------------: | :---------------------: | :------------------------: | :---------------------------: | :--------------------------: | :--------------------------------: | :---------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
67.1 | 64.4 | 0.99
3.34 | 0.31
0.36 | 12.403 | 2.467 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
71.1 | 68.5 | 0.99
5.47 | 0.31
0.68 | 16.658 | 2.730 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
75.3 | 73.2 | 0.99
13.59 | 0.31
1.93 | 26.613 | 4.312 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-nano](./rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 320x320
256x192 | 40.3
76.3 | 74.2 | 0.99
27.66 | 0.31
4.16 | 36.311 | 4.644 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
75.3 | 75.7 | 24.66
13.59 | 38.95
1.93 | - | 6.923 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMDet-m](./rtmdet/person/rtmdet_m_640-8xb32_coco-person.py) | [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 640x640
256x192 | 62.5
76.3 | 76.6 | 24.66
27.66 | 38.95
4.16 | - | 7.204 | [det](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_m_8xb32-100e_coco-obj365-person-235e8209.pth)
[pose](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | + +## 📊 模型库 [🔝](#-table-of-contents) + +**说明** + +- 此处提供的模型采用了多数据集联合训练以提高性能,模型指标不适用于学术比较。 +- 表格中为开启了 Flip Test 的测试结果。 +- RTMPose 在更多公开数据集上的性能指标可以前往 [Model Zoo](https://mmpose.readthedocs.io/en/latest/model_zoo_papers/algorithms.html) 查看。 +- RTMPose 在更多硬件平台上的推理速度可以前往 [Benchmark](./benchmark/README_CN.md) 查看。 +- 如果你有希望我们支持的数据集,欢迎[联系我们](https://uua478.fanqier.cn/f/xxmynrki)/[Google Questionnaire](https://docs.google.com/forms/d/e/1FAIpQLSfzwWr3eNlDzhU98qzk2Eph44Zio6hi5r0iSwfO9wSARkHdWg/viewform?usp=sf_link)! + +### 人体 2d 关键点 + +#### 17 Keypoints + +- 关键点骨架定义遵循 [COCO](http://cocodataset.org/). 详情见 [meta info](/configs/_base_/datasets/coco.py). +-
+
(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 91.28 | 63.38 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 92.95 | 66.19 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 94.13 | 68.53 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 94.35 | 68.98 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 94.32 | 69.85 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 94.54 | 70.14 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth) | + +
+
+AIC+COCO
+ +| Config | Input Size | AP(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 91.28 | 63.38 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-tiny_simcc-aic-coco_pt-aic-coco_420e-256x192-cfc8f33d_20230126.pth) | +| [RTMPose-s](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 92.95 | 66.19 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-aic-coco_pt-aic-coco_420e-256x192-fcb2599b_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 94.13 | 68.53 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 94.35 | 68.98 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-256x192-f016ffe0_20230126.pth) | +| [RTMPose-m](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 94.32 | 69.85 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-384x288-a62a0b32_20230228.pth) | +| [RTMPose-l](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 94.54 | 70.14 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-aic-coco_pt-aic-coco_420e-384x288-97d6cb0f_20230228.pth) | + +
+
(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.9 | 91.44 | 63.18 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.7 | 92.45 | 65.15 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 74.9 | 94.25 | 68.59 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.7 | 95.08 | 70.14 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 76.6 | 94.64 | 70.38 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 78.3 | 95.36 | 71.58 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_coco-384x288.py) | 384x288 | 78.8 | - | - | 49.43 | 17.22 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.zip) | + +
+
+Body8
+ +- `*` 代表模型在 7 个开源数据集上训练得到: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) +- `Body8` 代表除了以上提到的 7 个数据集,再加上 [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) 合并后一起进行评测得到的指标。 + +| Config | Input Size | AP(COCO) | PCK@0.1
(Body8) | AUC
(Body8) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :---------------: | :---------------------: | :-----------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.9 | 91.44 | 63.18 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7_420e-256x192-026a1439_20230504.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.7 | 92.45 | 65.15 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7_420e-256x192-acd4a1ef_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 74.9 | 94.25 | 68.59 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-256x192-e48f03d0_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.7 | 95.08 | 70.14 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-256x192-4dba18fc_20230504.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 76.6 | 94.64 | 70.38 | 13.72 | 4.33 | 24.78 | 3.66 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7_420e-384x288-65e718c4_20230504.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 78.3 | 95.36 | 71.58 | 27.79 | 9.35 | - | 6.05 | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7_420e-384x288-3f5a1437_20230504.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_coco-384x288.py) | 384x288 | 78.8 | - | - | 49.43 | 17.22 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7_700e-384x288-71d7b7e9_20230629.zip) | + +
+
+
+人体检测模型:
+
+| Detection Config | Input Size | Model AP
(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-tiny](./rtmdet/person/rtmdet_tiny_8xb32-300e_humanart.py) | 640x640 | 46.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_tiny_8xb32-300e_humanart-7da5554e.pth) | +| [RTMDet-s](./rtmdet/person/rtmdet_s_8xb32-300e_humanart.py) | 640x640 | 50.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_s_8xb32-300e_humanart-af5bd52d.pth) | +| [YOLOX-nano](./yolox/humanart/yolox_nano_8xb8-300e_humanart.py) | 640x640 | 38.9 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_nano_8xb8-300e_humanart-40f6f0d0.pth) | +| [YOLOX-tiny](./yolox/humanart/yolox_tiny_8xb8-300e_humanart.py) | 640x640 | 47.7 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_tiny_8xb8-300e_humanart-6f3252f9.pth) | +| [YOLOX-s](./yolox/humanart/yolox_s_8xb8-300e_humanart.py) | 640x640 | 54.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_s_8xb8-300e_humanart-3ef259a7.pth) | +| [YOLOX-m](./yolox/humanart/yolox_m_8xb8-300e_humanart.py) | 640x640 | 59.1 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_m_8xb8-300e_humanart-c2c7a14a.pth) | +| [YOLOX-l](./yolox/humanart/yolox_l_8xb8-300e_humanart.py) | 640x640 | 60.2 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_l_8xb8-300e_humanart-ce1d7a62.pth) | +| [YOLOX-x](./yolox/humanart/yolox_x_8xb8-300e_humanart.py) | 640x640 | 61.3 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_x_8xb8-300e_humanart-a39d44ed.pth) | + +人体姿态估计模型: + +| Config | Input Size | AP
(Human-Art GT) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :-----------------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.5 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.8 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 72.8 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 75.3 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.zip) | + +
+
+#### 26 Keypoints
+
+- 关键点骨架定义遵循 [Halpe26](https://github.com/Fang-Haoshu/Halpe-FullBody/),详情见 [meta info](/configs/_base_/datasets/halpe26.py)。
+- Human-Art
+ +- 面向艺术图片的人体姿态估计 RTMPose 模型由 [Human-Art](https://github.com/IDEA-Research/HumanArt) 提供。 +-(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-tiny](./rtmdet/person/rtmdet_tiny_8xb32-300e_humanart.py) | 640x640 | 46.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_tiny_8xb32-300e_humanart-7da5554e.pth) | +| [RTMDet-s](./rtmdet/person/rtmdet_s_8xb32-300e_humanart.py) | 640x640 | 50.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_s_8xb32-300e_humanart-af5bd52d.pth) | +| [YOLOX-nano](./yolox/humanart/yolox_nano_8xb8-300e_humanart.py) | 640x640 | 38.9 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_nano_8xb8-300e_humanart-40f6f0d0.pth) | +| [YOLOX-tiny](./yolox/humanart/yolox_tiny_8xb8-300e_humanart.py) | 640x640 | 47.7 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_tiny_8xb8-300e_humanart-6f3252f9.pth) | +| [YOLOX-s](./yolox/humanart/yolox_s_8xb8-300e_humanart.py) | 640x640 | 54.6 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_s_8xb8-300e_humanart-3ef259a7.pth) | +| [YOLOX-m](./yolox/humanart/yolox_m_8xb8-300e_humanart.py) | 640x640 | 59.1 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_m_8xb8-300e_humanart-c2c7a14a.pth) | +| [YOLOX-l](./yolox/humanart/yolox_l_8xb8-300e_humanart.py) | 640x640 | 60.2 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_l_8xb8-300e_humanart-ce1d7a62.pth) | +| [YOLOX-x](./yolox/humanart/yolox_x_8xb8-300e_humanart.py) | 640x640 | 61.3 | - | - | - | [Det Model](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/yolox_x_8xb8-300e_humanart-a39d44ed.pth) | + +人体姿态估计模型: + +| Config | Input Size | AP
(Human-Art GT) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------------------------------------------------------------: | :--------: | :-----------------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb256-420e_coco-256x192.py) | 256x192 | 65.5 | 3.34 | 0.36 | 3.20 | 1.06 | 9.02 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_8xb256-420e_humanart-256x192-60b68c98_20230612.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 69.8 | 5.47 | 0.68 | 4.48 | 1.39 | 13.89 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_8xb256-420e_humanart-256x192-5a3ac943_20230611.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 72.8 | 13.59 | 1.93 | 11.06 | 2.29 | 26.44 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_8xb256-420e_humanart-256x192-8430627b_20230611.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 75.3 | 27.66 | 4.16 | 18.85 | 3.46 | 45.37 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_8xb256-420e_humanart-256x192-389f2cb0_20230611.zip) | + +
(Body8) | AUC
(Body8) | Params(M) | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :---------------------------------------------------------------------------------------: | :--------: | :---------------------: | :-----------------: | :-------: | :------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-t\*](./rtmpose/body_2d_keypoint/rtmpose-t_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 91.89 | 66.35 | 3.51 | 0.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-body7_pt-body7-halpe26_700e-256x192-6020f8a6_20230605.zip) | +| [RTMPose-s\*](./rtmpose/body_2d_keypoint/rtmpose-s_8xb1024-700e_body8-halpe26-256x192.py) | 256x192 | 93.01 | 68.62 | 5.70 | 0.70 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-body7_pt-body7-halpe26_700e-256x192-7f134165_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 94.75 | 71.91 | 13.93 | 1.95 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-256x192-4d3e73dd_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-256x192.py) | 256x192 | 95.37 | 73.19 | 28.11 | 4.19 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-256x192-2abb7558_20230605.zip) | +| [RTMPose-m\*](./rtmpose/body_2d_keypoint/rtmpose-m_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.15 | 73.56 | 14.06 | 4.37 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-body7_pt-body7-halpe26_700e-384x288-89e6428b_20230605.zip) | +| [RTMPose-l\*](./rtmpose/body_2d_keypoint/rtmpose-l_8xb512-700e_body8-halpe26-384x288.py) | 384x288 | 95.56 | 74.38 | 28.24 | 9.40 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-body7_pt-body7-halpe26_700e-384x288-734182ce_20230605.zip) | +| [RTMPose-x\*](./rtmpose/body_2d_keypoint/rtmpose-x_8xb256-700e_body8-halpe26-384x288.py) | 384x288 | 95.74 | 74.82 | 50.00 | 17.29 | - | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-x_simcc-body7_pt-body7-halpe26_700e-384x288-7fb6e239_20230606.zip) | + +#### 模型剪枝 + +**说明** + +- 模型剪枝由 [MMRazor](https://github.com/open-mmlab/mmrazor) 提供 + +| Config | Input Size | AP
(COCO) | Params
(M) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | ncnn-FP16-Latency
(ms)
(Snapdragon 865) | Download | +| :-----------------------: | :--------: | :---------------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMPose-s-aic-coco-pruned | 256x192 | 69.4 | 3.43 | 0.35 | - | - | - | [pth](https://download.openmmlab.com/mmrazor/v1/pruning/group_fisher/rtmpose-s/group_fisher_finetune_rtmpose-s_8xb256-420e_aic-coco-256x192.pth) | + +更多信息,请参考 [GroupFisher Pruning for RTMPose](./rtmpose/pruning/README.md). + +### 人体全身 2d 关键点 (133 Keypoints) + +- 关键点骨架定义遵循 [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/),详情见 [meta info](/configs/_base_/datasets/coco_wholebody.py)。 +-
+
+
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 58.2 | 67.4 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 61.1 | 70.0 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 64.8 | 73.0 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth) | +| [RTMPose-x](./rtmpose/wholebody_2d_keypoint/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 65.3 | 73.3 | 18.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-coco-wholebody_pt-body7_270e-384x288-401dfc90_20230629.pth) | + +
+
+COCO-WholeBody
+ +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 58.2 | 67.4 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-coco-wholebody_pt-aic-coco_270e-256x192-cd5e845c_20230123.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 61.1 | 70.0 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-256x192-6f206314_20230124.pth) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 64.8 | 73.0 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-coco-wholebody_pt-aic-coco_270e-384x288-eaeb96c8_20230125.pth) | +| [RTMPose-x](./rtmpose/wholebody_2d_keypoint/rtmpose-x_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 65.3 | 73.3 | 18.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-x_simcc-coco-wholebody_pt-body7_270e-384x288-401dfc90_20230629.pth) | + +
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMW-m](./rtmpose/wholebody_2d_keypoint/rtmw-m_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 58.2 | 67.3 | 4.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-m-s_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 66.0 | 74.6 | 7.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 67.2 | 75.2 | 13.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.1 | 78.0 | 17.7 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-384x288_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.2 | 78.1 | 29.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth) | + +
+
+Cocktail14
+ +- `Cocktail13` 代表模型在 13 个开源数据集上训练得到: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) + - [COCO-Wholebody](https://github.com/jin-s13/COCO-WholeBody/) + - [UBody](https://github.com/IDEA-Research/OSX) + - [Human-Art](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#human-art-dataset) + - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html) + - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/) + - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/) + - [LaPa](https://github.com/JDAI-CV/lapa-dataset) + - [InterHand](https://mks0601.github.io/InterHand2.6M/) + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMW-m](./rtmpose/wholebody_2d_keypoint/rtmw-m_8xb1024-270e_cocktail14-256x192.py) | 256x192 | 58.2 | 67.3 | 4.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-l-m_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-m-s_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 66.0 | 74.6 | 7.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-256x192-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-256x192_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb704-270e_cocktail14-256x192.py) | 256x192 | 67.2 | 75.2 | 13.1 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-256x192-13a2546d_20231208.pth) | +| [RTMW-l](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.1 | 78.0 | 17.7 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-384x288-20231122.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmw/onnx_sdk/rtmw-dw-x-l_simcc-cocktail14_270e-384x288_20231122.zip) | +| [RTMW-x](./rtmpose/wholebody_2d_keypoint/rtmw-x_8xb320-270e_cocktail14-384x288.py) | 384x288 | 70.2 | 78.1 | 29.3 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmw/rtmw-x_simcc-cocktail14_pt-ucoco_270e-384x288-f840f204_20231122.pth) | + +
+
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-t](./rtmpose/wholebody_2d_keypoint/rtmpose-t_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 48.5 | 58.4 | 0.5 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth) | +| [RTMPose-s](./rtmpose/wholebody_2d_keypoint/rtmpose-s_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 53.8 | 63.2 | 0.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.zip) | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.6 | 69.5 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.1 | 71.7 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 66.5 | 74.3 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.zip) | + +
+
+### 动物 2d 关键点 (17 Keypoints)
+
+- 关键点骨架定义遵循 [AP-10K](https://github.com/AlexTheBad/AP-10K/),详情见 [meta info](/configs/_base_/datasets/ap10k.py)。
+- COCO+UBody
+ +- DWPose 模型由 [DWPose](https://github.com/IDEA-Research/DWPose) 项目提供 +- 模型在以下数据集上训练并蒸馏: + - [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/) + - [UBody](https://github.com/IDEA-Research/OSX) + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :------------------------------ | :--------: | :------: | :------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :-------------------------------: | +| [RTMPose-t](./rtmpose/wholebody_2d_keypoint/rtmpose-t_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 48.5 | 58.4 | 0.5 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-ucoco_dw-ucoco_270e-256x192-dcf277bf_20230728.pth) | +| [RTMPose-s](./rtmpose/wholebody_2d_keypoint/rtmpose-s_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 53.8 | 63.2 | 0.9 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-ucoco_dw-ucoco_270e-256x192-3fd922c8_20230728.zip) | +| [RTMPose-m](./rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.6 | 69.5 | 2.22 | 13.50 | 4.00 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ucoco_dw-ucoco_270e-256x192-c8b76419_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.1 | 71.7 | 4.52 | 23.41 | 5.67 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-256x192-4d6dfc62_20230728.zip) | +| [RTMPose-l](./rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 66.5 | 74.3 | 10.07 | 44.58 | 7.68 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-l_simcc-ucoco_dw-ucoco_270e-384x288-2438fd99_20230728.zip) | + +
+
+| Config | Input Size | AP(AP10K) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-m](./rtmpose/animal_2d_keypoint/rtmpose-m_8xb64-210e_ap10k-256x256.py) | 256x256 | 72.2 | 2.57 | 14.157 | 2.404 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-ap10k_pt-aic-coco_210e-256x256-7a041aa1_20230206.zip) | + +### 脸部 2d 关键点 (106 Keypoints) + +- 关键点骨架定义遵循 [LaPa](https://github.com/JDAI-CV/lapa-dataset),详情见 [meta info](/configs/_base_/datasets/lapa.py)。 +-
+
(LaPa) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-t\*](./rtmpose/face_2d_keypoint/rtmpose-t_8xb256-120e_lapa-256x256.py) | 256x256 | 1.67 | 0.652 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.zip) | +| [RTMPose-s\*](./rtmpose/face_2d_keypoint/rtmpose-s_8xb256-120e_lapa-256x256.py) | 256x256 | 1.59 | 1.119 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.zip) | +| [RTMPose-m\*](./rtmpose/face_2d_keypoint/rtmpose-m_8xb256-120e_lapa-256x256.py) | 256x256 | 1.44 | 2.852 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.zip) | + +
+
+### 手部 2d 关键点 (21 Keypoints)
+
+- 关键点骨架定义遵循 [COCO-WholeBody](https://github.com/jin-s13/COCO-WholeBody/),详情见 [meta info](/configs/_base_/datasets/coco_wholebody_hand.py)。
+- Face6
+ +- `Face6` and `*` 代表模型在 6 个开源数据集上训练得到: + - [COCO-Wholebody-Face](https://github.com/jin-s13/COCO-WholeBody/) + - [WFLW](https://wywu.github.io/projects/LAB/WFLW.html) + - [300W](https://ibug.doc.ic.ac.uk/resources/300-W/) + - [COFW](http://www.vision.caltech.edu/xpburgos/ICCV13/) + - [Halpe](https://github.com/Fang-Haoshu/Halpe-FullBody/) + - [LaPa](https://github.com/JDAI-CV/lapa-dataset) + +| Config | Input Size | NME(LaPa) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :----------------------------: | :--------: | :----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :------------------------------: | +| [RTMPose-t\*](./rtmpose/face_2d_keypoint/rtmpose-t_8xb256-120e_lapa-256x256.py) | 256x256 | 1.67 | 0.652 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-t_simcc-face6_pt-in1k_120e-256x256-df79d9a5_20230529.zip) | +| [RTMPose-s\*](./rtmpose/face_2d_keypoint/rtmpose-s_8xb256-120e_lapa-256x256.py) | 256x256 | 1.59 | 1.119 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-s_simcc-face6_pt-in1k_120e-256x256-d779fdef_20230529.zip) | +| [RTMPose-m\*](./rtmpose/face_2d_keypoint/rtmpose-m_8xb256-120e_lapa-256x256.py) | 256x256 | 1.44 | 2.852 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-face6_pt-in1k_120e-256x256-72a37400_20230529.zip) | + +
+
+| Detection Config | Input Size | Model AP(OneHand10K) | Flops
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :---------------------------: | :--------: | :---------------------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :--------------------: | +| [RTMDet-nano
(alpha version)](./rtmdet/hand/rtmdet_nano_320-8xb32_hand.py) | 320x320 | 76.0 | 0.31 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmdet_nano_8xb32-300e_hand-267f9c8f.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmdet_nano_8xb32-300e_hand-267f9c8f.zip) | + +
+
(COCO-Wholebody-Hand) | PCK@0.2
(Hand5) | AUC
(Hand5) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :-------------------------------------------------------------------------------------------------------------------: | :--------: | :-----------------------------------: | :---------------------: | :-----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-m\*
(alpha version)](./rtmpose/hand_2d_keypoint/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 81.5 | 96.4 | 83.9 | 2.581 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.zip) | + +
+
+### 预训练模型
+
+我们提供了 UDP 预训练的 CSPNeXt 模型参数,训练配置请参考 [pretrain_cspnext_udp folder](./rtmpose/pretrain_cspnext_udp/)。
+
+Hand5
+ +- `Hand5` and `*` 代表模型在 5 个开源数据集上训练得到: + - [COCO-Wholebody-Hand](https://github.com/jin-s13/COCO-WholeBody/) + - [OneHand10K](https://www.yangangwang.com/papers/WANG-MCC-2018-10.html) + - [FreiHand2d](https://lmb.informatik.uni-freiburg.de/projects/freihand/) + - [RHD2d](https://lmb.informatik.uni-freiburg.de/resources/datasets/RenderedHandposeDataset.en.html) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + +| Config | Input Size | PCK@0.2(COCO-Wholebody-Hand) | PCK@0.2
(Hand5) | AUC
(Hand5) | FLOPS
(G) | ORT-Latency
(ms)
(i7-11700) | TRT-FP16-Latency
(ms)
(GTX 1660Ti) | Download | +| :-------------------------------------------------------------------------------------------------------------------: | :--------: | :-----------------------------------: | :---------------------: | :-----------------: | :---------------: | :-----------------------------------------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| [RTMPose-m\*
(alpha version)](./rtmpose/hand_2d_keypoint/rtmpose-m_8xb32-210e_coco-wholebody-hand-256x256.py) | 256x256 | 81.5 | 96.4 | 83.9 | 2.581 | - | - | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.pth)
[onnx](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/onnx_sdk/rtmpose-m_simcc-hand5_pt-aic-coco_210e-256x256-74fb594_20230320.zip) | + +
+
(M) | Flops
(G) | AP
(GT) | AR
(GT) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------------: | :-------------: | :---------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 256x192 | 6.03 | 1.43 | 65.5 | 68.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth) | +| CSPNeXt-s | 256x192 | 8.58 | 1.78 | 70.0 | 73.3 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth) | +| CSPNeXt-m | 256x192 | 17.53 | 3.05 | 74.8 | 77.7 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth) | +| CSPNeXt-l | 256x192 | 32.44 | 5.32 | 77.2 | 79.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth) | + +
+
+AIC+COCO
+ +| Model | Input Size | Params(M) | Flops
(G) | AP
(GT) | AR
(GT) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------------: | :-------------: | :---------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 256x192 | 6.03 | 1.43 | 65.5 | 68.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-tiny_udp-aic-coco_210e-256x192-cbed682d_20230130.pth) | +| CSPNeXt-s | 256x192 | 8.58 | 1.78 | 70.0 | 73.3 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-s_udp-aic-coco_210e-256x192-92f5a029_20230130.pth) | +| CSPNeXt-m | 256x192 | 17.53 | 3.05 | 74.8 | 77.7 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-m_udp-aic-coco_210e-256x192-f2f7d6f6_20230130.pth) | +| CSPNeXt-l | 256x192 | 32.44 | 5.32 | 77.2 | 79.9 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmpose/cspnext-l_udp-aic-coco_210e-256x192-273b7631_20230130.pth) | + +
+
(M) | Flops
(G) | AP
(COCO) | PCK@0.2
(Body8) | AUC
(Body8) | Download | +| :------------: | :--------: | :----------------: | :---------------: | :---------------: | :---------------------: | :-----------------: | :--------------------------------------------------------------------------------: | +| CSPNeXt-tiny\* | 256x192 | 6.03 | 1.43 | 65.9 | 96.34 | 63.80 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth) | +| CSPNeXt-s\* | 256x192 | 8.58 | 1.78 | 68.7 | 96.59 | 64.92 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-body7_210e-256x192-8c9ccbdb_20230504.pth) | +| CSPNeXt-m\* | 256x192 | 17.53 | 3.05 | 73.7 | 97.42 | 68.19 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-256x192-e0c9327b_20230504.pth) | +| CSPNeXt-l\* | 256x192 | 32.44 | 5.32 | 75.7 | 97.76 | 69.57 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-256x192-5e9558ef_20230504.pth) | +| CSPNeXt-m\* | 384x288 | 17.53 | 6.86 | 75.8 | 97.60 | 70.18 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-384x288-b9bc2b57_20230504.pth) | +| CSPNeXt-l\* | 384x288 | 32.44 | 11.96 | 77.2 | 97.89 | 71.23 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-384x288-b15bc30d_20230504.pth) | +| CSPNeXt-x\* | 384x288 | 54.92 | 19.96 | 78.1 | 98.00 | 71.79 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth) | + +
+
+#### ImageNet
+
+我们提供了 ImageNet 分类训练的 CSPNeXt 模型参数,更多细节请参考 [RTMDet](https://github.com/open-mmlab/mmdetection/blob/latest/configs/rtmdet/README.md#classification)。
+
+| Model | Input Size | ParamsBody8
+ +- `*` 代表模型在 7 个开源数据集上训练得到: + - [AI Challenger](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#aic) + - [MS COCO](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#coco) + - [CrowdPose](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#crowdpose) + - [MPII](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#mpii) + - [sub-JHMDB](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#sub-jhmdb-dataset) + - [Halpe](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_wholebody_keypoint.html#halpe) + - [PoseTrack18](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#posetrack18) +- `Body8` 代表除了以上提到的 7 个数据集,再加上 [OCHuman](https://mmpose.readthedocs.io/en/latest/dataset_zoo/2d_body_keypoint.html#ochuman) 合并后一起进行评测得到的指标。 + +| Model | Input Size | Params(M) | Flops
(G) | AP
(COCO) | PCK@0.2
(Body8) | AUC
(Body8) | Download | +| :------------: | :--------: | :----------------: | :---------------: | :---------------: | :---------------------: | :-----------------: | :--------------------------------------------------------------------------------: | +| CSPNeXt-tiny\* | 256x192 | 6.03 | 1.43 | 65.9 | 96.34 | 63.80 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-tiny_udp-body7_210e-256x192-a3775292_20230504.pth) | +| CSPNeXt-s\* | 256x192 | 8.58 | 1.78 | 68.7 | 96.59 | 64.92 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-s_udp-body7_210e-256x192-8c9ccbdb_20230504.pth) | +| CSPNeXt-m\* | 256x192 | 17.53 | 3.05 | 73.7 | 97.42 | 68.19 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-256x192-e0c9327b_20230504.pth) | +| CSPNeXt-l\* | 256x192 | 32.44 | 5.32 | 75.7 | 97.76 | 69.57 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-256x192-5e9558ef_20230504.pth) | +| CSPNeXt-m\* | 384x288 | 17.53 | 6.86 | 75.8 | 97.60 | 70.18 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-m_udp-body7_210e-384x288-b9bc2b57_20230504.pth) | +| CSPNeXt-l\* | 384x288 | 32.44 | 11.96 | 77.2 | 97.89 | 71.23 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-l_udp-body7_210e-384x288-b15bc30d_20230504.pth) | +| CSPNeXt-x\* | 384x288 | 54.92 | 19.96 | 78.1 | 98.00 | 71.79 | [pth](https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/cspnext-x_udp-body7_210e-384x288-d28b58e6_20230529.pth) | + +
(M) | Flops
(G) | Top-1 (%) | Top-5 (%) | Download | +| :----------: | :--------: | :----------------: | :---------------: | :-------: | :-------: | :---------------------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 224x224 | 2.73 | 0.34 | 69.44 | 89.45 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-tiny_imagenet_600e-3a2dd350.pth) | +| CSPNeXt-s | 224x224 | 4.89 | 0.66 | 74.41 | 92.23 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-s_imagenet_600e-ea671761.pth) | +| CSPNeXt-m | 224x224 | 13.05 | 1.93 | 79.27 | 94.79 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth) | +| CSPNeXt-l | 224x224 | 27.16 | 4.19 | 81.30 | 95.62 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth) | +| CSPNeXt-x | 224x224 | 48.85 | 7.76 | 82.10 | 95.69 | [pth](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-x_8xb256-rsb-a1-600e_in1k-b3f78edd.pth) | + +## 👀 可视化 [🔝](#-table-of-contents) + +
+
+
+
+
+## 😎 快速尝试 [🔝](#-table-of-contents)
+
+我们提供了两种途径来让用户尝试 RTMPose 模型:
+
+- [在线 RTMPose Demo](https://openxlab.org.cn/apps/detail/mmpose/RTMPose)
+- [Examples](https://github.com/open-mmlab/mmpose/tree/dev-1.x/projects/rtmpose/examples/onnxruntime) 基于 Python 和 ONNXRuntime (无 MMCV 依赖)
+- MMPose demo 脚本 (基于 Pytorch)
+- MMDeploy SDK 预编译包 (推荐,速度提升6-10倍)
+
+### MMPose demo 脚本
+
+通过 MMPose 提供的 demo 脚本可以基于 Pytorch 快速进行[模型推理](https://mmpose.readthedocs.io/en/latest/user_guides/inference.html)和效果验证。
+
+**提示:**
+
+- 基于 Pytorch 推理并不能达到 RTMPose 模型的最大推理速度,只用于模型效果验证。
+- 输入模型路径可以是本地路径,也可以是下载链接。
+
+```shell
+# 前往 mmpose 目录
+cd ${PATH_TO_MMPOSE}
+
+# RTMDet 与 RTMPose 联合推理
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input {YOUR_TEST_IMG_or_VIDEO} \
+ --show
+
+# 摄像头推理
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input webcam \
+ --show
+```
+
+效果展示:
+
+
+
+### MMDeploy SDK 预编译包 (推荐)
+
+MMDeploy 提供了预编译的 SDK,用于对 RTMPose 项目进行 Pipeline 推理,其中推理所用的模型为 SDK 版本。
+
+- 所有的模型必须经过 `tools/deploy.py` 导出后才能使用 PoseTracker 进行推理。
+- 导出 SDK 版模型的教程见 [SDK 推理](#%EF%B8%8F-sdk-推理),推理的详细参数设置见 [Pipeline 推理](#-pipeline-推理)。
+- 你可以从 [硬件模型库](https://platform.openmmlab.com/deploee) 直接下载 SDK 版模型(ONNX、 TRT、ncnn 等)。
+- 同时我们也支持 [在线模型转换](https://platform.openmmlab.com/deploee/task-convert-list)。
+
+#### Linux\\
+
+说明:
+
+- GCC 版本需大于 7.5
+- cmake 版本需大于 3.20
+
+##### Python 推理
+
+1. 安装 mmdeploy_runtime 或者 mmdeploy_runtime_gpu
+
+```shell
+# for onnxruntime
+pip install mmdeploy-runtime
+
+# for onnxruntime-gpu / tensorrt
+pip install mmdeploy-runtime-gpu
+```
+
+2. 下载预编译包:
+
+```shell
+# onnxruntime
+# for ubuntu
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+# 解压并将 third_party 中第三方推理库的动态库添加到 PATH
+
+# for centos7 and lower
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64.tar.gz
+# 解压并将 third_party 中第三方推理库的动态库添加到 PATH
+
+# onnxruntime-gpu / tensorrt
+# for ubuntu
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+# 解压并将 third_party 中第三方推理库的动态库添加到 PATH
+
+# for centos7 and lower
+wget -c https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cuda11.3.tar.gz
+# 解压并将 third_party 中第三方推理库的动态库添加到 PATH
+```
+
+3. 下载 sdk 模型并解压到 `./example/python` 下。(该模型只用于演示,如需其他模型,请参考 [SDK 推理](#%EF%B8%8F-sdk-推理))
+
+```shell
+# rtmdet-nano + rtmpose-m for cpu sdk
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmpose-cpu.zip
+
+unzip rtmpose-cpu.zip
+```
+
+4. 使用 `pose_tracker.py` 进行推理:
+
+```shell
+# 进入 ./example/python
+
+# 请传入模型目录,而不是模型文件
+# 格式:
+# python pose_tracker.py cpu {det work-dir} {pose work-dir} {your_video.mp4}
+
+# 示例:
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4
+
+# 摄像头
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0
+```
+
+##### ONNX
+
+```shell
+# 下载预编译包
+wget https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# 解压文件
+tar -xzvf mmdeploy-1.0.0-linux-x86_64-cxx11abi.tar.gz
+
+# 切换到 sdk 目录
+cd mmdeploy-1.0.0-linux-x86_64-cxx11abi
+
+# 设置环境变量
+source set_env.sh
+
+# 如果系统中没有安装 opencv 3+,请执行以下命令。如果已安装,可略过
+bash install_opencv.sh
+
+# 编译可执行程序
+bash build_sdk.sh
+
+# 图片推理
+# 请传入模型目录,而不是模型文件
+./bin/det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cpu
+
+# 视频推理
+# 请传入模型目录,而不是模型文件
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cpu
+
+# 摄像头推理
+# 请传入模型目录,而不是模型文件
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0 --device cpu
+```
+
+##### TensorRT
+
+```shell
+# 下载预编译包
+wget https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+
+# 解压文件
+tar -xzvf mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3.tar.gz
+
+# 切换到 sdk 目录
+cd mmdeploy-1.0.0-linux-x86_64-cxx11abi-cuda11.3
+
+# 设置环境变量
+source set_env.sh
+
+# 如果系统中没有安装 opencv 3+,请执行以下命令。如果已安装,可略过
+bash install_opencv.sh
+
+# 编译可执行程序
+bash build_sdk.sh
+
+# 图片推理
+# 请传入模型目录,而不是模型文件
+./bin/det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cuda
+
+# 视频推理
+# 请传入模型目录,而不是模型文件
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cuda
+
+# 摄像头推理
+# 请传入模型目录,而不是模型文件
+./bin/pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0 --device cuda
+```
+
+详细参数设置见 [Pipeline 推理](#-pipeline-推理)。
+
+#### Windows
+
+##### Python 推理
+
+1. 安装 mmdeploy_runtime 或者 mmdeploy_runtime_gpu
+
+```shell
+# for onnxruntime
+pip install mmdeploy-runtime
+# 下载 [sdk](https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-windows-amd64.zip) 并将 third_party 中第三方推理库的动态库添加到 PATH
+
+# for onnxruntime-gpu / tensorrt
+pip install mmdeploy-runtime-gpu
+# 下载 [sdk](https://github.com/open-mmlab/mmdeploy/releases/download/v1.0.0/mmdeploy-1.0.0-windows-amd64-cuda11.3.zip) 并将 third_party 中第三方推理库的动态库添加到 PATH
+```
+
+2. 下载 sdk 模型并解压到 `./example/python` 下。(该模型只用于演示,如需其他模型,请参考 [SDK 推理](#%EF%B8%8F-sdk-推理))
+
+```shell
+# rtmdet-nano + rtmpose-m for cpu sdk
+wget https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmpose-cpu.zip
+
+unzip rtmpose-cpu.zip
+```
+
+3. 使用 `pose_tracker.py` 进行推理:
+
+```shell
+# 进入 ./example/python
+# 请传入模型目录,而不是模型文件
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4
+
+# 摄像头
+# 请传入模型目录,而不是模型文件
+python pose_tracker.py cpu rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ 0
+```
+
+##### 可执行文件推理
+
+1. 安装 [cmake](https://cmake.org/download/)。
+2. 前往 [mmdeploy](https://github.com/open-mmlab/mmdeploy/releases) 下载 win 预编译包。
+3. 解压文件,进入 sdk 目录。
+4. 使用管理员权限打开 PowerShell,执行以下命令:
+
+```shell
+set-ExecutionPolicy RemoteSigned
+```
+
+5. 安装 OpenCV:
+
+```shell
+# in sdk folder:
+.\install_opencv.ps1
+```
+
+6. 配置环境变量:
+
+```shell
+# in sdk folder:
+. .\set_env.ps1
+```
+
+7. 编译 sdk:
+
+```shell
+# in sdk folder:
+# 如果你通过 .\install_opencv.ps1 安装 opencv,直接运行如下指令:
+.\build_sdk.ps1
+# 如果你自行安装了 opencv,需要指定 OpenCVConfig.cmake 的路径:
+.\build_sdk.ps1 "path/to/folder/of/OpenCVConfig.cmake"
+```
+
+8. 可执行文件会在如下路径生成:
+
+```shell
+example\cpp\build\Release
+```
+
+### MMPose demo 脚本
+
+通过 MMPose 提供的 demo 脚本可以基于 Pytorch 快速进行[模型推理](https://mmpose.readthedocs.io/en/latest/user_guides/inference.html)和效果验证。
+
+**提示:**
+
+- 基于 Pytorch 推理并不能达到 RTMPose 模型的真实推理速度,只用于模型效果验证。
+
+```shell
+# 前往 mmpose 目录
+cd ${PATH_TO_MMPOSE}
+
+# RTMDet 与 RTMPose 联合推理
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ {PATH_TO_CHECKPOINT}/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ {PATH_TO_CHECKPOINT}/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input {YOUR_TEST_IMG_or_VIDEO} \
+ --show
+
+# 摄像头推理
+python demo/topdown_demo_with_mmdet.py \
+ projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ {PATH_TO_CHECKPOINT}/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ {PATH_TO_CHECKPOINT}/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ --input webcam \
+ --show
+```
+
+效果展示:
+
+
+
+## 👨🏫 模型训练 [🔝](#-table-of-contents)
+
+请参考 [训练与测试](https://mmpose.readthedocs.io/en/latest/user_guides/train_and_test.html) 进行 RTMPose 的训练。
+
+**提示**:
+
+- 当用户的数据集较小时请根据情况缩小 `batch_size` 和 `base_lr`。
+- 模型选择
+ - m:推荐首选使用
+ - t/s:适用于极端低算力的移动设备,或对推理速度要求严格的场景
+ - l:适用于算力较强、对速度不敏感的场景
+
+## 🏗️ 部署教程 [🔝](#-table-of-contents)
+
+本教程将展示如何通过 [MMDeploy](https://github.com/open-mmlab/mmdeploy/tree/main) 部署 RTMPose 项目。
+
+- 你可以从 [硬件模型库](https://platform.openmmlab.com/deploee) 直接下载 SDK 版模型(ONNX、 TRT、ncnn 等)。
+- 同时我们也支持 [在线模型转换](https://platform.openmmlab.com/deploee/task-convert-list)。
+
+### 🧩 安装
+
+在开始部署之前,首先你需要确保正确安装了 MMPose, MMDetection, MMDeploy,相关安装教程如下:
+
+- [安装 MMPose 与 MMDetection](https://mmpose.readthedocs.io/zh_CN/latest/installation.html)
+- [安装 MMDeploy](https://mmdeploy.readthedocs.io/zh_CN/latest/04-supported-codebases/mmpose.html)
+
+根据部署后端的不同,有的后端需要对自定义算子进行编译,请根据需求前往对应的文档确保环境搭建正确:
+
+- [ONNX](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/onnxruntime.html)
+- [TensorRT](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/tensorrt.html)
+- [OpenVINO](https://mmdeploy.readthedocs.io/zh_CN/latest/05-supported-backends/openvino.html)
+- [TorchScript](https://mmdeploy.readthedocs.io/en/latest/05-supported-backends/torchscript.html)
+- [更多](https://github.com/open-mmlab/mmdeploy/tree/main/docs/en/05-supported-backends)
+
+### 🛠️ 模型转换
+
+在完成安装之后,你就可以开始模型部署了。通过 MMDeploy 提供的 `tools/deploy.py` 可以方便地将 Pytorch 模型转换到不同的部署后端。
+
+我们本节演示将 RTMDet 和 RTMPose 模型导出为 ONNX 和 TensorRT 格式,如果你希望了解更多内容请前往 [MMDeploy 文档](https://mmdeploy.readthedocs.io/zh_CN/latest/02-how-to-run/convert_model.html)。
+
+- ONNX 配置
+
+ \- RTMDet:[`detection_onnxruntime_static.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmdet/detection/detection_onnxruntime_static.py)
+
+ \- RTMPose:[`pose-detection_simcc_onnxruntime_dynamic.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py)
+
+- TensorRT 配置
+
+ \- RTMDet:[`detection_tensorrt_static-320x320.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmdet/detection/detection_tensorrt_static-320x320.py)
+
+ \- RTMPose:[`pose-detection_simcc_tensorrt_dynamic-256x192.py`](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py)
+
+- 更多
+
+ | Backend | Config |
+ | :---------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+ | ncnn-fp16 | [pose-detection_simcc_ncnn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_ncnn-fp16_static-256x192.py) |
+ | CoreML | [pose-detection_simcc_coreml_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_coreml_static-256x192.py) |
+ | OpenVINO | [pose-detection_simcc_openvino_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_openvino_static-256x192.py) |
+ | RKNN | [pose-detection_simcc_rknn-fp16_static-256x192.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_simcc_rknn-fp16_static-256x192.py) |
+ | TorchScript | [pose-detection_torchscript.py](https://github.com/open-mmlab/mmdeploy/blob/main/configs/mmpose/pose-detection_torchscript.py) |
+
+如果你需要对部署配置进行修改,请参考 [MMDeploy config tutorial](https://mmdeploy.readthedocs.io/zh_CN/latest/02-how-to-run/write_config.html).
+
+本教程中使用的文件结构如下:
+
+```shell
+|----mmdeploy
+|----mmdetection
+|----mmpose
+```
+
+#### ONNX
+
+运行如下命令:
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+# 转换 RTMDet
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmdet/detection/detection_onnxruntime_static.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmdet-nano \
+ --device cpu \
+ --show \
+ --dump-info # 导出 sdk info
+
+# 转换 RTMPose
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # 导出 sdk info
+```
+
+默认导出模型文件为 `{work-dir}/end2end.onnx`
+
+#### TensorRT
+
+运行如下命令:
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}
+
+# 转换 RTMDet
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmdet/detection/detection_tensorrt_static-320x320.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmdet-nano \
+ --device cuda:0 \
+ --show \
+ --dump-info # 导出 sdk info
+
+# 转换 RTMPose
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_tensorrt_dynamic-256x192.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-trt/rtmpose-m \
+ --device cuda:0 \
+ --show \
+ --dump-info # 导出 sdk info
+```
+
+默认导出模型文件为 `{work-dir}/end2end.engine`
+
+🎊 如果模型顺利导出,你将会看到样例图片上的检测结果:
+
+
+
+#### 高级设置
+
+如果需要使用 TensorRT-FP16,你可以通过修改以下配置开启:
+
+```Python
+# in MMDeploy config
+backend_config = dict(
+ type='tensorrt',
+ common_config=dict(
+ fp16_mode=True # 打开 fp16
+ ))
+```
+
+### 🕹️ SDK 推理
+
+要进行 Pipeline 推理,需要先用 MMDeploy 导出 SDK 版本的 det 和 pose 模型,只需要在参数中加上`--dump-info`。
+
+此处以 onnxruntime 的 cpu 模型为例,运行如下命令:
+
+```shell
+# RTMDet
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmdet/detection/detection_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmdet/person/rtmdet_nano_320-8xb32_coco-person.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmpose/rtmdet_nano_8xb32-100e_coco-obj365-person-05d8511e.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmdet-nano \
+ --device cpu \
+ --show \
+ --dump-info # 导出 sdk info
+
+# RTMPose
+# 输入模型路径可以是本地路径,也可以是下载链接。
+python tools/deploy.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ ../mmpose/projects/rtmpose/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ https://download.openmmlab.com/mmpose/v1/projects/rtmposev1/rtmpose-m_simcc-aic-coco_pt-aic-coco_420e-256x192-63eb25f7_20230126.pth \
+ demo/resources/human-pose.jpg \
+ --work-dir rtmpose-ort/rtmpose-m \
+ --device cpu \
+ --show \
+ --dump-info # 导出 sdk info
+```
+
+默认会导出三个 json 文件:
+
+```shell
+|----sdk
+ |----end2end.onnx # ONNX model
+ |----end2end.engine # TensorRT engine file
+
+ |----pipeline.json #
+ |----deploy.json # json files for the SDK
+ |----detail.json #
+```
+
+#### Python API
+
+```Python
+# Copyright (c) OpenMMLab. All rights reserved.
+import argparse
+
+import cv2
+import numpy as np
+from mmdeploy_runtime import PoseDetector
+
+def parse_args():
+ parser = argparse.ArgumentParser(
+ description='show how to use sdk python api')
+ parser.add_argument('device_name', help='name of device, cuda or cpu')
+ parser.add_argument(
+ 'model_path',
+ help='path of mmdeploy SDK model dumped by model converter')
+ parser.add_argument('image_path', help='path of an image')
+ parser.add_argument(
+ '--bbox',
+ default=None,
+ nargs='+',
+ type=int,
+ help='bounding box of an object in format (x, y, w, h)')
+ args = parser.parse_args()
+ return args
+
+def main():
+ args = parse_args()
+
+ img = cv2.imread(args.image_path)
+
+ detector = PoseDetector(
+ model_path=args.model_path, device_name=args.device_name, device_id=0)
+
+ if args.bbox is None:
+ result = detector(img)
+ else:
+ # converter (x, y, w, h) -> (left, top, right, bottom)
+ print(args.bbox)
+ bbox = np.array(args.bbox, dtype=int)
+ bbox[2:] += bbox[:2]
+ result = detector(img, bbox)
+ print(result)
+
+ _, point_num, _ = result.shape
+ points = result[:, :, :2].reshape(point_num, 2)
+ for [x, y] in points.astype(int):
+ cv2.circle(img, (x, y), 1, (0, 255, 0), 2)
+
+ cv2.imwrite('output_pose.png', img)
+
+if __name__ == '__main__':
+ main()
+```
+
+#### C++ API
+
+```C++
+#include "mmdeploy/pose_detector.hpp"
+#include "opencv2/imgcodecs.hpp"
+#include "opencv2/imgproc.hpp"
+#include "utils/argparse.h" // See: https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/utils/argparse.h
+
+DEFINE_ARG_string(model_path, "Model path");
+DEFINE_ARG_string(image_path, "Input image path");
+DEFINE_string(device_name, "cpu", R"(Device name, e.g. "cpu", "cuda")");
+DEFINE_int32(bbox_x, -1, R"(x position of the bounding box)");
+DEFINE_int32(bbox_y, -1, R"(y position of the bounding box)");
+DEFINE_int32(bbox_w, -1, R"(width of the bounding box)");
+DEFINE_int32(bbox_h, -1, R"(height of the bounding box)");
+
+int main(int argc, char* argv[]) {
+ if (!utils::ParseArguments(argc, argv)) {
+ return -1;
+ }
+
+ cv::Mat img = cv::imread(ARGS_image_path);
+
+ mmdeploy::PoseDetector detector(mmdeploy::Model{ARGS_model_path}, mmdeploy::Device{FLAGS_device_name, 0});
+
+ mmdeploy::PoseDetector::Result result{0, 0, nullptr};
+
+ if (FLAGS_bbox_x == -1 || FLAGS_bbox_y == -1 || FLAGS_bbox_w == -1 || FLAGS_bbox_h == -1) {
+ result = detector.Apply(img);
+ } else {
+ // convert (x, y, w, h) -> (left, top, right, bottom)
+ mmdeploy::cxx::Rect rect;
+ rect.left = FLAGS_bbox_x;
+ rect.top = FLAGS_bbox_y;
+ rect.right = FLAGS_bbox_x + FLAGS_bbox_w;
+ rect.bottom = FLAGS_bbox_y + FLAGS_bbox_h;
+ result = detector.Apply(img, {rect});
+ }
+
+ // Draw circles at detected keypoints
+ for (size_t i = 0; i < result[0].length; ++i) {
+ cv::Point keypoint(result[0].point[i].x, result[0].point[i].y);
+ cv::circle(img, keypoint, 1, cv::Scalar(0, 255, 0), 2); // Draw filled circle
+ }
+
+ // Save the output image
+ cv::imwrite("output_pose.png", img);
+
+ return 0;
+}
+```
+
+对于 C++ API 示例,请将 MMDeploy 加入到 CMake 项目中:
+
+```CMake
+find_package(MMDeploy REQUIRED)
+target_link_libraries(${name} PRIVATE mmdeploy ${OpenCV_LIBS})
+```
+
+#### 其他语言
+
+- [C# API 示例](https://github.com/open-mmlab/mmdeploy/tree/main/demo/csharp)
+- [JAVA API 示例](https://github.com/open-mmlab/mmdeploy/tree/main/demo/java)
+
+### 🚀 Pipeline 推理
+
+#### 图片推理
+
+如果用户有跟随 MMDeploy 安装教程进行正确编译,在 `mmdeploy/build/bin/` 路径下会看到 `det_pose` 的可执行文件。
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}/build/bin/
+
+# 单张图片推理
+./det_pose rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_img.jpg --device cpu
+
+required arguments:
+ det_model Detection 模型路径 [string]
+ pose_model Pose 模型路径 [string]
+ image 输入图片路径 [string]
+
+optional arguments:
+ --device 推理设备 "cpu", "cuda" [string = "cpu"]
+ --output 导出图片路径 [string = "det_pose_output.jpg"]
+ --skeleton 骨架定义文件路径,或使用预定义骨架:
+ "coco" [string = "coco", "coco-wholoebody"]
+ --det_label 用于姿势估计的检测标签 [int32 = 0]
+ (0 在 coco 中对应 person)
+ --det_thr 检测分数阈值 [double = 0.5]
+ --det_min_bbox_size 最小检测框大小 [double = -1]
+ --pose_thr 关键点置信度阈值 [double = 0]
+```
+
+**API** **示例**
+
+\- [`det_pose.py`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/python/det_pose.py)
+
+\- [`det_pose.cxx`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/det_pose.cxx)
+
+#### 视频推理
+
+如果用户有跟随 MMDeploy 安装教程进行正确编译,在 `mmdeploy/build/bin/` 路径下会看到 `pose_tracker` 的可执行文件。
+
+- 将 `input` 输入 `0` 可以使用摄像头推理
+
+```shell
+# 前往 mmdeploy 目录
+cd ${PATH_TO_MMDEPLOY}/build/bin/
+
+# 视频推理
+./pose_tracker rtmpose-ort/rtmdet-nano/ rtmpose-ort/rtmpose-m/ your_video.mp4 --device cpu
+
+required arguments:
+ det_model Detection 模型路径 [string]
+ pose_model Pose 模型路径 [string]
+ input 输入图片路径或摄像头序号 [string]
+
+optional arguments:
+ --device 推理设备 "cpu", "cuda" [string = "cpu"]
+ --output 导出视频路径 [string = ""]
+ --output_size 输出视频帧的长边 [int32 = 0]
+ --flip 设置为1,用于水平翻转输入 [int32 = 0]
+ --show 使用`cv::imshow`时,传递给`cv::waitKey`的延迟;
+ -1: 关闭 [int32 = 1]
+ --skeleton 骨架数据的路径或预定义骨架的名称:
+ "coco", "coco-wholebody" [string = "coco"]
+ --background 导出视频背景颜色, "default": 原图, "black":
+ 纯黑背景 [string = "default"]
+ --det_interval 检测间隔 [int32 = 1]
+ --det_label 用于姿势估计的检测标签 [int32 = 0]
+ (0 在 coco 中对应 person)
+ --det_thr 检测分数阈值 [double = 0.5]
+ --det_min_bbox_size 最小检测框大小 [double = -1]
+ --det_nms_thr NMS IOU阈值,用于合并检测到的bboxes和
+ 追踪到的目标的 bboxes [double = 0.7]
+ --pose_max_num_bboxes 每一帧用于姿势估计的 bboxes 的最大数量
+ [int32 = -1]
+ --pose_kpt_thr 可见关键点的阈值 [double = 0.5]
+ --pose_min_keypoints 有效姿势的最小关键点数量,-1表示上限(n_kpts/2) [int32 = -1]
+ --pose_bbox_scale 将关键点扩展到 bbox 的比例 [double = 1.25]
+ --pose_min_bbox_size 最小追踪尺寸,尺寸小于阈值的 bbox 将被剔除 [double = -1]
+ --pose_nms_thr 用于抑制重叠姿势的 NMS OKS/IOU阈值。
+ 当多个姿态估计重叠到同一目标时非常有用 [double = 0.5]
+ --track_iou_thr 追踪 IOU 阈值 [double = 0.4]
+ --track_max_missing 最大追踪容错 [int32 = 10]
+```
+
+**API** **示例**
+
+\- [`pose_tracker.py`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/python/pose_tracker.py)
+
+\- [`pose_tracker.cxx`](https://github.com/open-mmlab/mmdeploy/blob/main/demo/csrc/cpp/pose_tracker.cxx)
+
+## 📚 常用功能 [🔝](#-table-of-contents)
+
+### 🚀 模型测速 [🔝](#-table-of-contents)
+
+如果需要测试模型在部署框架下的推理速度,MMDeploy 提供了方便的 `tools/profiler.py` 脚本。
+
+用户需要准备一个存放测试图片的文件夹`./test_images`,profiler 将随机从该目录下抽取图片用于模型测速。
+
+```shell
+python tools/profiler.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ ../test_images \
+ --model {WORK_DIR}/end2end.onnx \
+ --shape 256x192 \
+ --device cpu \
+ --warmup 50 \
+ --num-iter 200
+```
+
+测试结果如下:
+
+```shell
+01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS
+01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS
+01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS
+01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS
+01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS
+01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS
+01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS
+01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS
+----- Settings:
++------------+---------+
+| batch size | 1 |
+| shape | 256x192 |
+| iterations | 200 |
+| warmup | 50 |
++------------+---------+
+----- Results:
++--------+------------+---------+
+| Stats | Latency/ms | FPS |
++--------+------------+---------+
+| Mean | 11.060 | 90.412 |
+| Median | 11.852 | 84.375 |
+| Min | 7.812 | 128.007 |
+| Max | 13.690 | 73.044 |
++--------+------------+---------+
+```
+
+如果你希望详细了解 profiler 的更多参数设置与功能,可以前往 [Profiler Docs](https://mmdeploy.readthedocs.io/en/main/02-how-to-run/useful_tools.html#profiler)
+
+### 📊 精度验证 [🔝](#-table-of-contents)
+
+如果需要测试模型在部署框架下的推理精度,MMDeploy 提供了方便的 `tools/test.py` 脚本。
+
+```shell
+python tools/test.py \
+ configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \
+ {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \
+ --model {PATH_TO_MODEL}/rtmpose_m.pth \
+ --device cpu
+```
+
+详细内容请参考 [MMDeploys Docs](https://github.com/open-mmlab/mmdeploy/blob/main/docs/zh_cn/02-how-to-run/profile_model.md)
+
+## 📜 引用 [🔝](#-table-of-contents)
+
+如果您觉得 RTMPose 对您的研究工作有所帮助,请考虑引用它:
+
+```bibtex
+@misc{https://doi.org/10.48550/arxiv.2303.07399,
+ doi = {10.48550/ARXIV.2303.07399},
+ url = {https://arxiv.org/abs/2303.07399},
+ author = {Jiang, Tao and Lu, Peng and Zhang, Li and Ma, Ningsheng and Han, Rui and Lyu, Chengqi and Li, Yining and Chen, Kai},
+ keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences},
+ title = {RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose},
+ publisher = {arXiv},
+ year = {2023},
+ copyright = {Creative Commons Attribution 4.0 International}
+}
+
+@misc{mmpose2020,
+ title={OpenMMLab Pose Estimation Toolbox and Benchmark},
+ author={MMPose Contributors},
+ howpublished = {\url{https://github.com/open-mmlab/mmpose}},
+ year={2020}
+}
+```
diff --git a/projects/rtmpose/app.py b/projects/rtmpose/app.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b5be8f9bb3bba2164a41b1440fb5da365875de9
--- /dev/null
+++ b/projects/rtmpose/app.py
@@ -0,0 +1,200 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+
+import os
+from functools import partial
+
+# prepare environment
+project_path = os.path.join(os.path.dirname(os.path.abspath(__file__)))
+mmpose_path = project_path.split('/projects', 1)[0]
+
+os.system('python -m pip install Openmim')
+os.system('python -m pip install openxlab')
+os.system('python -m pip install gradio==3.38.0')
+
+os.system('python -m mim install "mmcv>=2.0.0"')
+os.system('python -m mim install "mmengine>=0.9.0"')
+os.system('python -m mim install "mmdet>=3.0.0"')
+os.system(f'python -m mim install -e {mmpose_path}')
+
+import gradio as gr # noqa
+from openxlab.model import download # noqa
+
+from mmpose.apis import MMPoseInferencer # noqa
+
+# download checkpoints
+download(model_repo='mmpose/RTMPose', model_name='dwpose-l')
+download(model_repo='mmpose/RTMPose', model_name='RTMW-x')
+download(model_repo='mmpose/RTMPose', model_name='RTMO-l')
+download(model_repo='mmpose/RTMPose', model_name='RTMPose-l-body8')
+download(model_repo='mmpose/RTMPose', model_name='RTMPose-m-face6')
+
+models = [
+ 'rtmpose | body', 'rtmo | body', 'rtmpose | face', 'dwpose | wholebody',
+ 'rtmw | wholebody'
+]
+cached_model = {model: None for model in models}
+
+
+def predict(input,
+ draw_heatmap=False,
+ model_type='body',
+ skeleton_style='mmpose',
+ input_type='image'):
+ """Visualize the demo images.
+
+ Using mmdet to detect the human.
+ """
+
+ if model_type == 'rtmpose | face':
+ if cached_model[model_type] is None:
+ cached_model[model_type] = MMPoseInferencer(pose2d='face')
+ model = cached_model[model_type]
+
+ elif model_type == 'dwpose | wholebody':
+ if cached_model[model_type] is None:
+ cached_model[model_type] = MMPoseInferencer(
+ pose2d=os.path.join(
+ project_path, 'rtmpose/wholebody_2d_keypoint/'
+ 'rtmpose-l_8xb32-270e_coco-wholebody-384x288.py'),
+ pose2d_weights='https://download.openmmlab.com/mmpose/v1/'
+ 'projects/rtmposev1/rtmpose-l_simcc-ucoco_dw-ucoco_270e-'
+ '384x288-2438fd99_20230728.pth')
+ model = cached_model[model_type]
+
+ elif model_type == 'rtmw | wholebody':
+ if cached_model[model_type] is None:
+ cached_model[model_type] = MMPoseInferencer(
+ pose2d=os.path.join(
+ project_path, 'rtmpose/wholebody_2d_keypoint/'
+ 'rtmw-l_8xb320-270e_cocktail14-384x288.py'),
+ pose2d_weights='https://download.openmmlab.com/mmpose/v1/'
+ 'projects/rtmw/rtmw-dw-x-l_simcc-cocktail14_270e-'
+ '384x288-20231122.pth')
+ model = cached_model[model_type]
+
+ elif model_type == 'rtmpose | body':
+ if cached_model[model_type] is None:
+ cached_model[model_type] = MMPoseInferencer(pose2d='rtmpose-l')
+ model = cached_model[model_type]
+
+ elif model_type == 'rtmo | body':
+ if cached_model[model_type] is None:
+ cached_model[model_type] = MMPoseInferencer(pose2d='rtmo')
+ model = cached_model[model_type]
+ draw_heatmap = False
+
+ else:
+ raise ValueError
+
+ if input_type == 'image':
+
+ result = next(
+ model(
+ input,
+ return_vis=True,
+ draw_heatmap=draw_heatmap,
+ skeleton_style=skeleton_style))
+ img = result['visualization'][0][..., ::-1]
+ return img
+
+ elif input_type == 'video':
+
+ for _ in model(
+ input,
+ vis_out_dir='test.mp4',
+ draw_heatmap=draw_heatmap,
+ skeleton_style=skeleton_style):
+ pass
+
+ return 'test.mp4'
+
+ return None
+
+
+news_list = [
+ '2023-8-1: We support [DWPose](https://arxiv.org/pdf/2307.15880.pdf).',
+ '2023-9-25: We release an alpha version of RTMW model, the technical '
+ 'report will be released soon.',
+ '2023-12-11: Update RTMW models, the online version is the RTMW-l with '
+ '70.1 mAP on COCO-Wholebody.',
+ '2023-12-13: We release an alpha version of RTMO (One-stage RTMPose) '
+ 'models.',
+]
+
+with gr.Blocks() as demo:
+
+ with gr.Tab('Upload-Image'):
+ input_img = gr.Image(type='numpy')
+ button = gr.Button('Inference', variant='primary')
+ hm = gr.Checkbox(label='draw-heatmap', info='Whether to draw heatmap')
+ model_type = gr.Dropdown(models, label='Model | Keypoint Type')
+
+ gr.Markdown('## News')
+ for news in news_list[::-1]:
+ gr.Markdown(news)
+
+ gr.Markdown('## Output')
+ out_image = gr.Image(type='numpy')
+ gr.Examples(['./tests/data/coco/000000000785.jpg'], input_img)
+ input_type = 'image'
+ button.click(
+ partial(predict, input_type=input_type),
+ [input_img, hm, model_type], out_image)
+
+ with gr.Tab('Webcam-Image'):
+ input_img = gr.Image(source='webcam', type='numpy')
+ button = gr.Button('Inference', variant='primary')
+ hm = gr.Checkbox(label='draw-heatmap', info='Whether to draw heatmap')
+ model_type = gr.Dropdown(models, label='Model | Keypoint Type')
+
+ gr.Markdown('## News')
+ for news in news_list[::-1]:
+ gr.Markdown(news)
+
+ gr.Markdown('## Output')
+ out_image = gr.Image(type='numpy')
+
+ input_type = 'image'
+ button.click(
+ partial(predict, input_type=input_type),
+ [input_img, hm, model_type], out_image)
+
+ with gr.Tab('Upload-Video'):
+ input_video = gr.Video(type='mp4')
+ button = gr.Button('Inference', variant='primary')
+ hm = gr.Checkbox(label='draw-heatmap', info='Whether to draw heatmap')
+ model_type = gr.Dropdown(models, label='Model | Keypoint type')
+
+ gr.Markdown('## News')
+ for news in news_list[::-1]:
+ gr.Markdown(news)
+
+ gr.Markdown('## Output')
+ out_video = gr.Video()
+
+ input_type = 'video'
+ button.click(
+ partial(predict, input_type=input_type),
+ [input_video, hm, model_type], out_video)
+
+ with gr.Tab('Webcam-Video'):
+ input_video = gr.Video(source='webcam', format='mp4')
+ button = gr.Button('Inference', variant='primary')
+ hm = gr.Checkbox(label='draw-heatmap', info='Whether to draw heatmap')
+ model_type = gr.Dropdown(models, label='Model | Keypoint Type')
+
+ gr.Markdown('## News')
+ for news in news_list[::-1]:
+ gr.Markdown(news)
+
+ gr.Markdown('## Output')
+ out_video = gr.Video()
+
+ input_type = 'video'
+ button.click(
+ partial(predict, input_type=input_type),
+ [input_video, hm, model_type], out_video)
+
+gr.close_all()
+demo.queue()
+demo.launch()
diff --git a/projects/rtmpose/benchmark/README.md b/projects/rtmpose/benchmark/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..46c036273c4107dac9c67f247547d44d55cc9b11
--- /dev/null
+++ b/projects/rtmpose/benchmark/README.md
@@ -0,0 +1,116 @@
+# RTMPose Benchmarks
+
+English | [简体中文](./README_CN.md)
+
+Community users are welcome to contribute to this project directory by performing inference speed tests on different hardware devices.
+
+Currently tested:
+
+- CPU
+ - Intel i7-11700
+- GPU
+ - NVIDIA GeForce 1660 Ti
+ - NVIDIA GeForce RTX 3090
+- Nvidia Jetson
+ - AGX Orin
+ - Orin NX
+- ARM
+ - Snapdragon 865
+
+## Body 2d (17 Keypoints)
+
+### Model Info
+
+| Config | Input Size | AP
+
+(COCO) | Params(M) | FLOPS(G) | +| :-------------------------------------------------------------------------------: | :--------: | :---------------: | :-------: | :------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 3.34 | 0.36 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 5.47 | 0.68 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 13.59 | 1.93 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 27.66 | 4.16 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 13.72 | 4.33 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 27.79 | 9.35 | + +### Speed Benchmark + +- Numbers displayed in the table are inference latencies in millisecond(ms). + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | ncnn-FP16
(Snapdragon 865) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :---------: | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 3.20 | 1.06 | 0.98 | 9.02 | 1.63 | 1.97 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 4.48 | 1.39 | 1.12 | 13.89 | 1.85 | 2.18 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 11.06 | 2.29 | 1.18 | 26.44 | 2.72 | 3.35 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 18.85 | 3.46 | 1.37 | 45.37 | 3.67 | 4.78 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 24.78 | 3.66 | 1.20 | 26.44 | 3.45 | 5.08 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | - | 6.05 | 1.74 | - | 4.93 | 7.23 | + +## WholeBody 2d (133 Keypoints) + +### Model Info + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | +| :------------------------------------------------------------------------------------------- | :--------: | :------: | :------: | :------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.4 | 66.7 | 2.22 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.2 | 69.4 | 4.52 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 67.0 | 72.3 | 10.07 | + +### Speed Benchmark + +- Numbers displayed in the table are inference latencies in millisecond(ms). +- Data from different community users are separated by `|`. + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :-------------------------------------------- | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 13.50 | 4.00 | 1.17 \| 1.84 | 2.79 | 3.51 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 23.41 | 5.67 | 1.44 \| 2.61 | 3.80 | 4.95 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 44.58 | 7.68 | 1.75 \| 4.24 | 5.08 | 7.20 | + +## How To Test Speed + +If you need to test the inference speed of the model under the deployment framework, MMDeploy provides a convenient `tools/profiler.py` script. + +The user needs to prepare a folder for the test images `./test_images`, the profiler will randomly read images from this directory for the model speed test. + +```shell +python tools/profiler.py \ + configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \ + {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \ + ../test_images \ + --model {WORK_DIR}/end2end.onnx \ + --shape 256x192 \ + --device cpu \ + --warmup 50 \ + --num-iter 200 +``` + +The result is as follows: + +```shell +01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS +01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS +01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS +01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS +01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS +01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS +----- Settings: ++------------+---------+ +| batch size | 1 | +| shape | 256x192 | +| iterations | 200 | +| warmup | 50 | ++------------+---------+ +----- Results: ++--------+------------+---------+ +| Stats | Latency/ms | FPS | ++--------+------------+---------+ +| Mean | 11.060 | 90.412 | +| Median | 11.852 | 84.375 | +| Min | 7.812 | 128.007 | +| Max | 13.690 | 73.044 | ++--------+------------+---------+ +``` + +If you want to learn more details of profiler, you can refer to the [Profiler Docs](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/useful_tools.html#profiler). diff --git a/projects/rtmpose/benchmark/README_CN.md b/projects/rtmpose/benchmark/README_CN.md new file mode 100644 index 0000000000000000000000000000000000000000..e1824d12b75580aa72fa767fda87816844cb5e3a --- /dev/null +++ b/projects/rtmpose/benchmark/README_CN.md @@ -0,0 +1,116 @@ +# RTMPose Benchmarks + +简体中文 | [English](./README.md) + +欢迎社区用户在不同硬件设备上进行推理速度测试,贡献到本项目目录下。 + +当前已测试: + +- CPU + - Intel i7-11700 +- GPU + - NVIDIA GeForce 1660 Ti + - NVIDIA GeForce RTX 3090 +- Nvidia Jetson + - AGX Orin + - Orin NX +- ARM + - Snapdragon 865 + +### 人体 2d 关键点 (17 Keypoints) + +### Model Info + +| Config | Input Size | AP
(COCO) | Params(M) | FLOPS(G) | +| :-------------------------------------------------------------------------------: | :--------: | :---------------: | :-------: | :------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 68.5 | 3.34 | 0.36 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 72.2 | 5.47 | 0.68 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 75.8 | 13.59 | 1.93 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 76.5 | 27.66 | 4.16 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 77.0 | 13.72 | 4.33 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | 77.3 | 27.79 | 9.35 | + +### Speed Benchmark + +图中所示为模型推理时间,单位毫秒。 + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | ncnn-FP16
(Snapdragon 865) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :---------: | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-t](../rtmpose/body_2d_keypoint/rtmpose-tiny_8xb256-420e_coco-256x192.py) | 256x192 | 3.20 | 1.06 | 0.98 | 9.02 | 1.63 | 1.97 | +| [RTMPose-s](../rtmpose/body_2d_keypoint/rtmpose-s_8xb256-420e_coco-256x192.py) | 256x192 | 4.48 | 1.39 | 1.12 | 13.89 | 1.85 | 2.18 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py) | 256x192 | 11.06 | 2.29 | 1.18 | 26.44 | 2.72 | 3.35 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-256x192.py) | 256x192 | 18.85 | 3.46 | 1.37 | 45.37 | 3.67 | 4.78 | +| [RTMPose-m](../rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-384x288.py) | 384x288 | 24.78 | 3.66 | 1.20 | 26.44 | 3.45 | 5.08 | +| [RTMPose-l](../rtmpose/body_2d_keypoint/rtmpose-l_8xb256-420e_coco-384x288.py) | 384x288 | - | 6.05 | 1.74 | - | 4.93 | 7.23 | + +### 人体全身 2d 关键点 (133 Keypoints) + +### Model Info + +| Config | Input Size | Whole AP | Whole AR | FLOPS(G) | +| :------------------------------------------------------------------------------------------- | :--------: | :------: | :------: | :------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 60.4 | 66.7 | 2.22 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 63.2 | 69.4 | 4.52 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 67.0 | 72.3 | 10.07 | + +### Speed Benchmark + +- 图中所示为模型推理时间,单位毫秒。 +- 来自不同社区用户的测试数据用 `|` 分隔开。 + +| Config | Input Size | ORT
(i7-11700) | TRT-FP16
(GTX 1660Ti) | TRT-FP16
(RTX 3090) | TRT-FP16
(Jetson AGX Orin) | TRT-FP16
(Jetson Orin NX) | +| :-------------------------------------------- | :--------: | :--------------------: | :---------------------------: | :-------------------------: | :--------------------------------: | :-------------------------------: | +| [RTMPose-m](../rtmpose/wholebody_2d_keypoint/rtmpose-m_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 13.50 | 4.00 | 1.17 \| 1.84 | 2.79 | 3.51 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb64-270e_coco-wholebody-256x192.py) | 256x192 | 23.41 | 5.67 | 1.44 \| 2.61 | 3.80 | 4.95 | +| [RTMPose-l](../rtmpose/wholebody_2d_keypoint/rtmpose-l_8xb32-270e_coco-wholebody-384x288.py) | 384x288 | 44.58 | 7.68 | 1.75 \| 4.24 | 5.08 | 7.20 | + +## 如何测试推理速度 + +我们使用 MMDeploy 提供的 `tools/profiler.py` 脚本进行模型测速。 + +用户需要准备一个存放测试图片的文件夹`./test_images`,profiler 将随机从该目录下抽取图片用于模型测速。 + +```shell +python tools/profiler.py \ + configs/mmpose/pose-detection_simcc_onnxruntime_dynamic.py \ + {RTMPOSE_PROJECT}/rtmpose/body_2d_keypoint/rtmpose-m_8xb256-420e_coco-256x192.py \ + ../test_images \ + --model {WORK_DIR}/end2end.onnx \ + --shape 256x192 \ + --device cpu \ + --warmup 50 \ + --num-iter 200 +``` + +The result is as follows: + +```shell +01/30 15:06:35 - mmengine - INFO - [onnxruntime]-70 times per count: 8.73 ms, 114.50 FPS +01/30 15:06:36 - mmengine - INFO - [onnxruntime]-90 times per count: 9.05 ms, 110.48 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-110 times per count: 9.87 ms, 101.32 FPS +01/30 15:06:37 - mmengine - INFO - [onnxruntime]-130 times per count: 9.99 ms, 100.10 FPS +01/30 15:06:38 - mmengine - INFO - [onnxruntime]-150 times per count: 10.39 ms, 96.29 FPS +01/30 15:06:39 - mmengine - INFO - [onnxruntime]-170 times per count: 10.77 ms, 92.86 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-190 times per count: 10.98 ms, 91.05 FPS +01/30 15:06:40 - mmengine - INFO - [onnxruntime]-210 times per count: 11.19 ms, 89.33 FPS +01/30 15:06:41 - mmengine - INFO - [onnxruntime]-230 times per count: 11.16 ms, 89.58 FPS +01/30 15:06:42 - mmengine - INFO - [onnxruntime]-250 times per count: 11.06 ms, 90.41 FPS +----- Settings: ++------------+---------+ +| batch size | 1 | +| shape | 256x192 | +| iterations | 200 | +| warmup | 50 | ++------------+---------+ +----- Results: ++--------+------------+---------+ +| Stats | Latency/ms | FPS | ++--------+------------+---------+ +| Mean | 11.060 | 90.412 | +| Median | 11.852 | 84.375 | +| Min | 7.812 | 128.007 | +| Max | 13.690 | 73.044 | ++--------+------------+---------+ +``` + +If you want to learn more details of profiler, you can refer to the [Profiler Docs](https://mmdeploy.readthedocs.io/en/latest/02-how-to-run/useful_tools.html#profiler). diff --git a/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md b/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md new file mode 100644 index 0000000000000000000000000000000000000000..edce803106ba59dbc339018a8281b1f8f282b2a0 --- /dev/null +++ b/projects/rtmpose/examples/PoseTracker-Android-Prototype/README.md @@ -0,0 +1,5 @@ +# PoseTracker-Android-Prototype + +PoseTracker Android Demo Prototype, which is based on [mmdeploy](https://github.com/open-mmlab/mmdeploy/tree/dev-1.x) + +Please refer to [Original Repository](https://github.com/hanrui1sensetime/PoseTracker-Android-Prototype). diff --git a/projects/rtmpose/examples/README.md b/projects/rtmpose/examples/README.md new file mode 100644 index 0000000000000000000000000000000000000000..5846f039e7c1e18ab853f2839c1f306e76feedb9 --- /dev/null +++ b/projects/rtmpose/examples/README.md @@ -0,0 +1,18 @@ +## List of examples + +### 1. RTMPose-Deploy + +RTMPose-Deploy is a C++ code example for RTMPose localized deployment. + +- [ONNXRuntime-CPU](https://github.com/HW140701/RTMPose-Deploy) +- [TensorRT](https://github.com/Dominic23331/rtmpose_tensorrt) + +### 2. RTMPose inference with ONNXRuntime (Python) + +This example shows how to run RTMPose inference with ONNXRuntime in Python. + +### 3. PoseTracker Android Demo + +PoseTracker Android Demo Prototype based on mmdeploy. + +- [Original Repository](https://github.com/hanrui1sensetime/PoseTracker-Android-Prototype) diff --git a/projects/rtmpose/examples/RTMPose-Deploy/README.md b/projects/rtmpose/examples/RTMPose-Deploy/README.md new file mode 100644 index 0000000000000000000000000000000000000000..c4fce9a4df617c145c19d2dd953e8621d6c8773f --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/README.md @@ -0,0 +1,12 @@ +# RTMPose-Deploy + +[中文说明](./README_CN.md) + +RTMPose-Deploy is a C ++ code example for RTMPose localized deployment. + +At present, RTMPose-Deploy has completed to use ONNXRuntime-CPU and TensorRT to deploy the RTMDet and RTMPose on the Windows system. + +| Deployment Framework | Repo | +| -------------------- | -------------------------------------------------------------------- | +| ONNXRuntime-CPU | [RTMPose-Deploy](https://github.com/HW140701/RTMPose-Deploy) | +| TensorRT | [rtmpose_tensorrt](https://github.com/Dominic23331/rtmpose_tensorrt) | diff --git a/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md b/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md new file mode 100644 index 0000000000000000000000000000000000000000..82ee093658d6bccc68832d09e5e73489a55a304b --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/README_CN.md @@ -0,0 +1,10 @@ +# RTMPose-Deploy + +RTMPose-Deploy 是一个进行 RTMPose 本地化部署的 C++ 代码示例。 + +目前,RTMPose-Deploy 已完成在 Windows 系统上使用 OnnxRuntime CPU 和TensorRT 对 RTMDet 和 RTMPose 完成了部署。 + +| 部署框架 | 仓库 | +| --------------- | -------------------------------------------------------------------- | +| ONNXRuntime-CPU | [RTMPose-Deploy](https://github.com/HW140701/RTMPose-Deploy) | +| TensorRT | [rtmpose_tensorrt](https://github.com/Dominic23331/rtmpose_tensorrt) | diff --git a/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h b/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h new file mode 100644 index 0000000000000000000000000000000000000000..fe586e2356776f248afd180d7b6f660696ef4ac8 --- /dev/null +++ b/projects/rtmpose/examples/RTMPose-Deploy/Windows/OnnxRumtime-CPU/src/RTMPoseOnnxRuntime/characterset_convert.h @@ -0,0 +1,151 @@ +#ifndef _CHARACTERSET_CONVERT_H_ +#define _CHARACTERSET_CONVERT_H_ + +#include