
import paddle
from ppdiffusers import DiffusionPipeline, ControlNetModel
from ppdiffusers.utils import load_image, image_grid
import numpy as np
from PIL import Image
import cv2
class CannyDetector:
def __call__(self, img, low_threshold, high_threshold):
return cv2.Canny(img, low_threshold, high_threshold)
apply_canny = CannyDetector()
# 加载模型
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", paddle_dtype=paddle.float16)
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5",
controlnet=controlnet,
safety_checker=None,
feature_extractor=None,
requires_safety_checker=False,
paddle_dtype=paddle.float16,
custom_pipeline="webui_stable_diffusion_controlnet",
custom_revision="9aa0fcae034d99a796c3077ec6fea84808fc5875")
# 或者 # custom_pipeline="junnyu/webui_controlnet_ppdiffusers")
# 加载图片
raw_image = load_image("https://paddlenlp.bj.bcebos.com/models/community/junnyu/develop/control_bird_canny_demo.png")
canny_image = Image.fromarray(apply_canny(np.array(raw_image), low_threshold=100, high_threshold=200))
# 选择sampler
# Please choose in ['pndm', 'lms', 'euler', 'euler-ancestral', 'dpm-multi', 'dpm-single', 'unipc-multi', 'ddim', 'ddpm', 'deis-multi', 'heun', 'kdpm2-ancestral', 'kdpm2']!
pipe.switch_scheduler('euler-ancestral')
# propmpt 和 negative_prompt
prompt = "a (blue:1.5) bird"
negative_prompt = ""
# 想要返回多少张图片
num = 4
clip_skip = 2
controlnet_conditioning_scale = 1.
num_inference_steps = 50
all_images = []
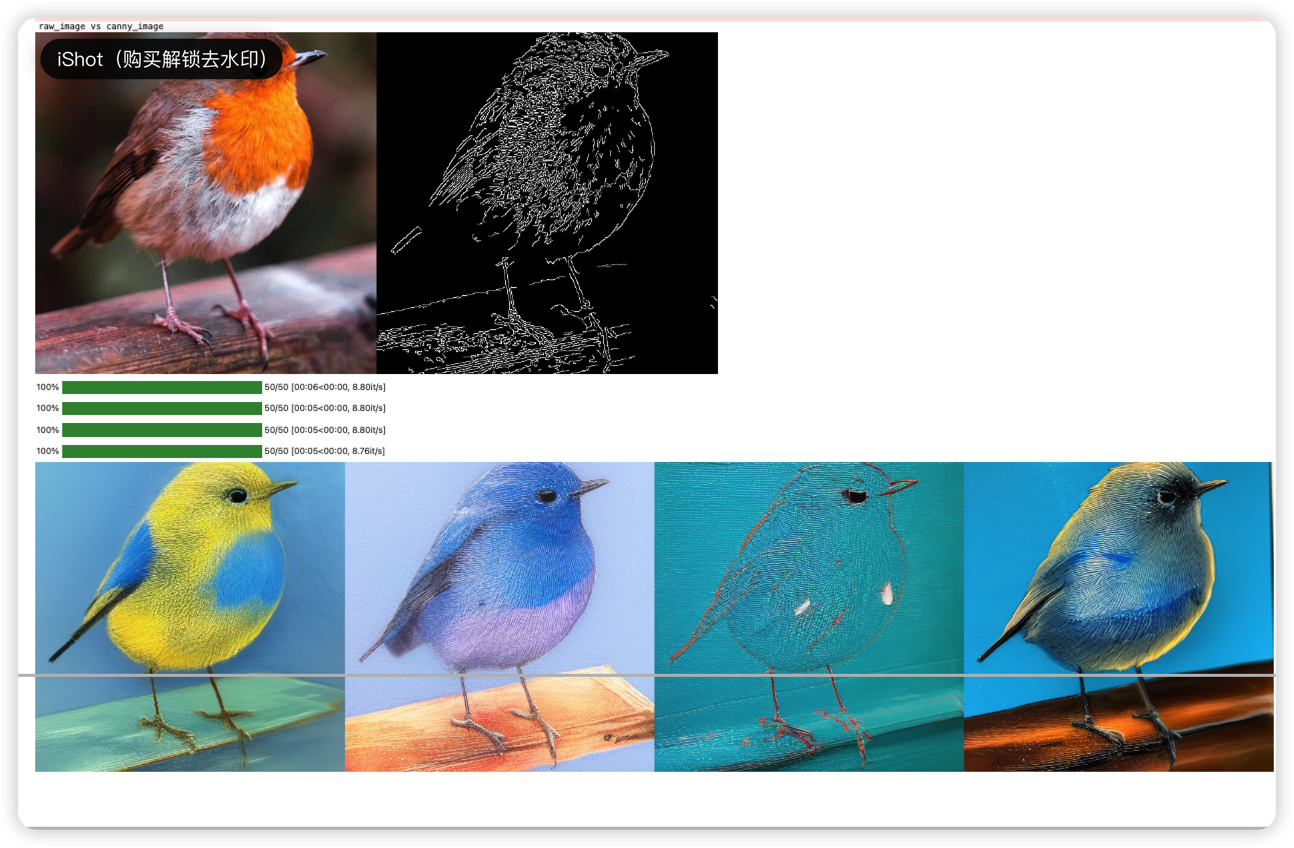
print("raw_image vs canny_image")
display(image_grid([raw_image, canny_image], 1, 2))
for i in range(num):
img = pipe(
prompt=prompt,
negative_prompt = negative_prompt,
image=canny_image,
num_inference_steps=num_inference_steps,
controlnet_conditioning_scale=controlnet_conditioning_scale,
clip_skip= clip_skip,
).images[0]
all_images.append(img)
display(image_grid(all_images, 1, num))
Inference Providers NEW
This model isn't deployed by any Inference Provider. 🙋 Ask for provider support