
license: mit
tags:
- vla
- robotics
- multimodal
- autoregressive
library_name: transformers
pipeline_tag: robotics
Being-H0: Vision-Language-Action Pretraining from Large-Scale Human Videos
![]()
![]()
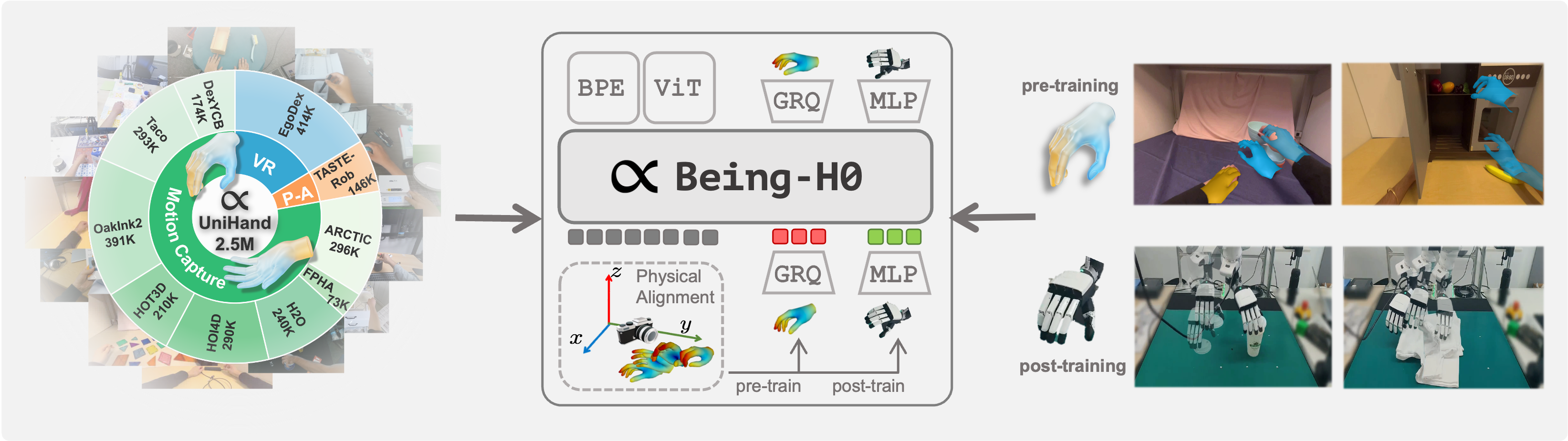
We introduce Being-H0, the first dexterous Vision-Language-Action model pretrained from large-scale human videos via explicit hand motion modeling.
News
- [2025-08-02]: We release the Being-H0 codebase and pretrained models! Check our Hugging Face Model Hub for more details. 🔥🔥🔥
- [2025-07-21]: We publish Being-H0! Check our paper here. 🌟🌟🌟
Model Checkpoints
Download pre-trained models from Hugging Face:
| Model Type | Model Name | Parameters | Description |
|---|---|---|---|
| Motion Model | Being-H0-GRVQ-8K | - | Motion tokenizer |
| VLA Pre-trained | Being-H0-1B-2508 | 1B | Base vision-language-action model |
| VLA Pre-trained | Being-H0-8B-2508 | 8B | Base vision-language-action model |
| VLA Pre-trained | Being-H0-14B-2508 | 14B | Base vision-language-action model |
| VLA Post-trained | Being-H0-8B-Align-2508 | 8B | Fine-tuned for robot alignment |
Setup
Clone repository
git clone https://github.com/BeingBeyond/Being-H0.git
cd Being-H0
Create environment
conda env create -f environment.yml
conda activate beingvla
Install package
pip install flash-attn --no-build-isolation
pip install git+https://github.com/lixiny/manotorch.git
pip install git+https://github.com/mattloper/chumpy.git
Download MANO package
- Visit MANO website
- Create an account by clicking Sign Up and provide your information
- Download Models and Code (the downloaded file should have the format
mano_v*_*.zip). Note that all code and data from this download falls under the MANO license. - unzip and copy the contents in
mano_v*_*/folder to thebeingvla/models/motion/mano/folder
Inference
Motion Generation
python -m beingvla.inference.vla_internvl_inference \
--model_path /path/to/Being-H0-XXX \
--motion_code_path "/path/to/Being-H0-GRVQ-8K/wrist+/path/to/Being-H0-GRVQ-8K/finger" \
--input_image ./playground/unplug_airpods.jpg \
--task_description "unplug the charging cable from the AirPods" \
--hand_mode both \
--num_samples 3 \
--num_seconds 4 \
--enable_render true \
--output_dir ./work_dirs/
Evaluation
Setup robot communication:
python -m beingvla.models.motion.m2m.aligner.run_server \
--model-path /path/to/Being-H0-XXX-Align \
--port 12305 \
--action-chunk-length 16
Run evaluation on robot task:
python -m beingvla.models.motion.m2m.aligner.eval_policy \
--model-path /path/to/Being-H0-XXX-Align \
--zarr-path /path/to/zarr/data \
--task_description "Put the little white duck into the cup." \
--action-chunk-length 16
Contributing and Building on Being-H0
We encourage researchers and practitioners to leverage Being-H0 as a foundation for their own creative experiments and applications. Whether you're adapting Being-H0 to new robotic platforms, exploring novel hand manipulation tasks, or extending the model to new domains, our modular codebase is designed to support your innovations. We welcome contributions of all kinds - from bug fixes and documentation improvements to new features and model architectures. By building on Being-H0 together, we can advance the field of dexterous vision-language-action modeling and enable robots to understand and replicate the rich complexity of human hand movements. Join us in making robotic manipulation more intuitive, capable, and accessible to all.
Citation
If you find our work useful, please consider citing us and give a star to our repository! 🌟🌟🌟
Being-H0
@article{beingbeyond2025beingh0,
title={Being-H0: Vision-Language-Action Pretraining from Large-Scale Human Videos},
author={Luo, Hao and Feng, Yicheng and Zhang, Wanpeng and Zheng, Sipeng and Wang, Ye and Yuan, Haoqi and Liu, Jiazheng and Xu, Chaoyi and Jin, Qin and Lu, Zongqing},
journal={arXiv preprint arXiv:2507.15597},
year={2025}
}